Transformers documentation
TrOCR
TrOCR
Overview
The TrOCR model was proposed in TrOCR: Transformer-based Optical Character Recognition with Pre-trained Models by Minghao Li, Tengchao Lv, Lei Cui, Yijuan Lu, Dinei Florencio, Cha Zhang, Zhoujun Li, Furu Wei. TrOCR consists of an image Transformer encoder and an autoregressive text Transformer decoder to perform optical character recognition (OCR).
The abstract from the paper is the following:
Text recognition is a long-standing research problem for document digitalization. Existing approaches for text recognition are usually built based on CNN for image understanding and RNN for char-level text generation. In addition, another language model is usually needed to improve the overall accuracy as a post-processing step. In this paper, we propose an end-to-end text recognition approach with pre-trained image Transformer and text Transformer models, namely TrOCR, which leverages the Transformer architecture for both image understanding and wordpiece-level text generation. The TrOCR model is simple but effective, and can be pre-trained with large-scale synthetic data and fine-tuned with human-labeled datasets. Experiments show that the TrOCR model outperforms the current state-of-the-art models on both printed and handwritten text recognition tasks.
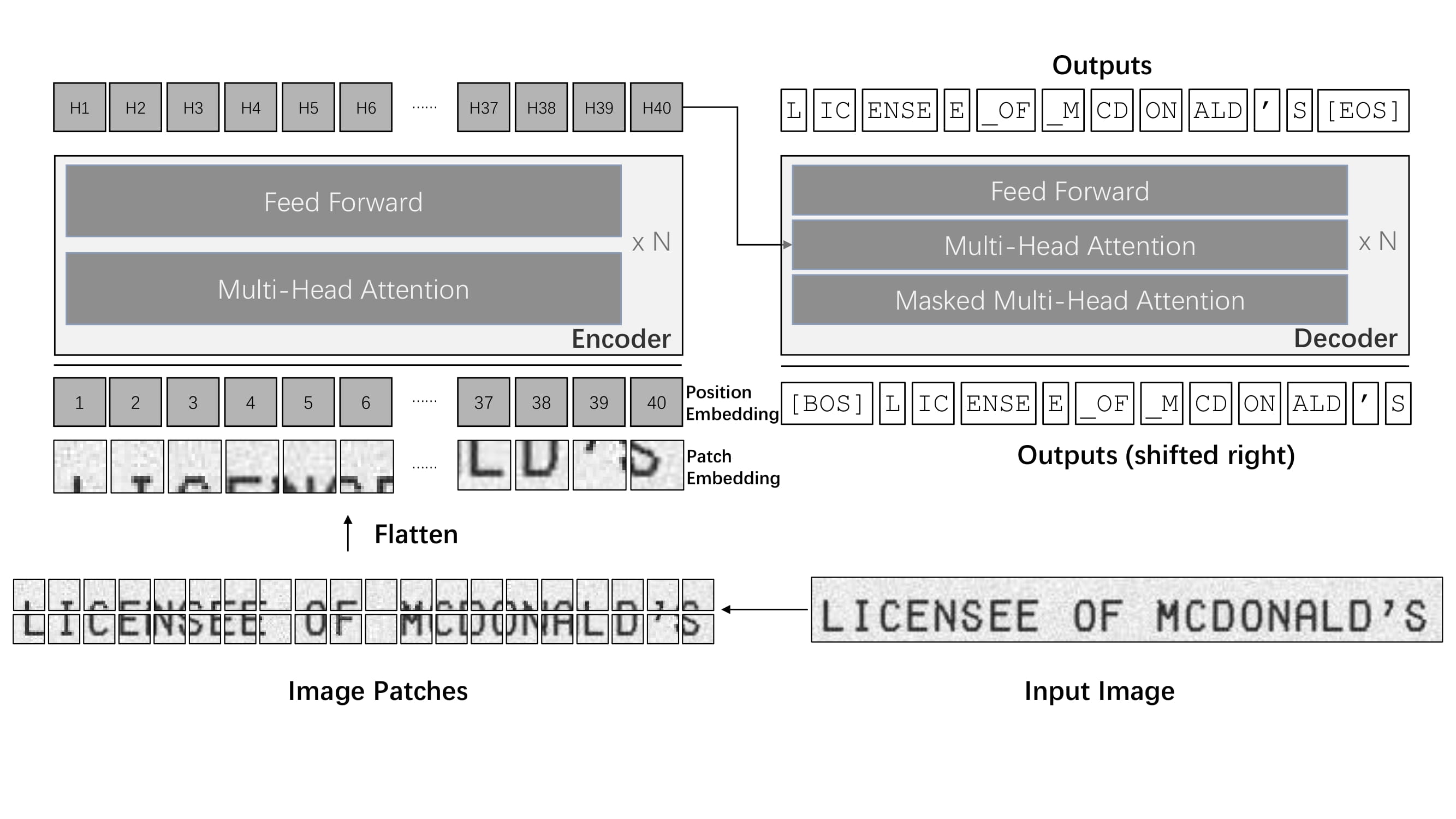 TrOCR architecture. Taken from the original paper.
TrOCR architecture. Taken from the original paper.
Please refer to the VisionEncoderDecoder class on how to use this model.
This model was contributed by nielsr. The original code can be found here.
Tips:
- The quickest way to get started with TrOCR is by checking the tutorial notebooks, which show how to use the model at inference time as well as fine-tuning on custom data.
- TrOCR is pre-trained in 2 stages before being fine-tuned on downstream datasets. It achieves state-of-the-art results on both printed (e.g. the SROIE dataset and handwritten (e.g. the IAM Handwriting dataset text recognition tasks. For more information, see the official models.
- TrOCR is always used within the VisionEncoderDecoder framework.
Inference
TrOCR’s VisionEncoderDecoder model accepts images as input and makes use of
generate() to autoregressively generate text given the input image.
The [ViTFeatureExtractor/DeiTFeatureExtractor] class is responsible for preprocessing the input image and
[RobertaTokenizer/XLMRobertaTokenizer] decodes the generated target tokens to the target string. The
TrOCRProcessor wraps [ViTFeatureExtractor/DeiTFeatureExtractor] and [RobertaTokenizer/XLMRobertaTokenizer]
into a single instance to both extract the input features and decode the predicted token ids.
- Step-by-step Optical Character Recognition (OCR)
>>> from transformers import TrOCRProcessor, VisionEncoderDecoderModel
>>> import requests
>>> from PIL import Image
>>> processor = TrOCRProcessor.from_pretrained("microsoft/trocr-base-handwritten")
>>> model = VisionEncoderDecoderModel.from_pretrained("microsoft/trocr-base-handwritten")
>>> # load image from the IAM dataset
>>> url = "https://fki.tic.heia-fr.ch/static/img/a01-122-02.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw).convert("RGB")
>>> pixel_values = processor(image, return_tensors="pt").pixel_values
>>> generated_ids = model.generate(pixel_values)
>>> generated_text = processor.batch_decode(generated_ids, skip_special_tokens=True)[0] See the model hub to look for TrOCR checkpoints.
TrOCRConfig
class transformers.TrOCRConfig
< source >( vocab_size = 50265 d_model = 1024 decoder_layers = 12 decoder_attention_heads = 16 decoder_ffn_dim = 4096 activation_function = 'gelu' max_position_embeddings = 512 dropout = 0.1 attention_dropout = 0.0 activation_dropout = 0.0 decoder_start_token_id = 2 classifier_dropout = 0.0 init_std = 0.02 decoder_layerdrop = 0.0 use_cache = False scale_embedding = False use_learned_position_embeddings = True layernorm_embedding = True pad_token_id = 1 bos_token_id = 0 eos_token_id = 2 **kwargs )
Parameters
-
vocab_size (
int, optional, defaults to 50265) — Vocabulary size of the TrOCR model. Defines the number of different tokens that can be represented by theinputs_idspassed when calling TrOCRForCausalLM. -
d_model (
int, optional, defaults to 1024) — Dimensionality of the layers and the pooler layer. -
decoder_layers (
int, optional, defaults to 12) — Number of decoder layers. -
decoder_attention_heads (
int, optional, defaults to 16) — Number of attention heads for each attention layer in the Transformer decoder. -
decoder_ffn_dim (
int, optional, defaults to 4096) — Dimensionality of the “intermediate” (often named feed-forward) layer in decoder. -
activation_function (
strorfunction, optional, defaults to"gelu") — The non-linear activation function (function or string) in the pooler. If string,"gelu","relu","silu"and"gelu_new"are supported. -
max_position_embeddings (
int, optional, defaults to 512) — The maximum sequence length that this model might ever be used with. Typically set this to something large just in case (e.g., 512 or 1024 or 2048). -
dropout (
float, optional, defaults to 0.1) — The dropout probability for all fully connected layers in the embeddings, and pooler. -
attention_dropout (
float, optional, defaults to 0.0) — The dropout ratio for the attention probabilities. -
activation_dropout (
float, optional, defaults to 0.0) — The dropout ratio for activations inside the fully connected layer. -
classifier_dropout (
float, optional, defaults to 0.0) — The dropout ratio for classifier. -
init_std (
float, optional, defaults to 0.02) — The standard deviation of the truncated_normal_initializer for initializing all weight matrices. decoder_layerdrop — (float, optional, defaults to 0.0): The LayerDrop probability for the decoder. See the [LayerDrop paper](see https://arxiv.org/abs/1909.11556) for more details. -
use_cache (
bool, optional, defaults toTrue) — Whether or not the model should return the last key/values attentions (not used by all models). -
scale_embedding (
bool, optional, defaults toFalse) — Whether or not to scale the word embeddings by sqrt(d_model). -
use_learned_position_embeddings (
bool, optional, defaults toTrue) — Whether or not to use learned position embeddings. If not, sinusoidal position embeddings will be used. -
layernorm_embedding (
bool, optional, defaults toTrue) — Whether or not to use a layernorm after the word + position embeddings.
This is the configuration class to store the configuration of a TrOCRForCausalLM. It is used to instantiate an TrOCR model according to the specified arguments, defining the model architecture. Instantiating a configuration with the defaults will yield a similar configuration to that of the TrOCR microsoft/trocr-base architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
Example:
>>> from transformers import TrOCRForCausalLM, TrOCRConfig
>>> # Initializing a TrOCR-base style configuration
>>> configuration = TrOCRConfig()
>>> # Initializing a model from the TrOCR-base style configuration
>>> model = TrOCRForCausalLM(configuration)
>>> # Accessing the model configuration
>>> configuration = model.configTrOCRProcessor
class transformers.TrOCRProcessor
< source >( feature_extractor tokenizer )
Parameters
-
feature_extractor ([
ViTFeatureExtractor/DeiTFeatureExtractor]) — An instance of [ViTFeatureExtractor/DeiTFeatureExtractor]. The feature extractor is a required input. -
tokenizer ([
RobertaTokenizer/XLMRobertaTokenizer]) — An instance of [RobertaTokenizer/XLMRobertaTokenizer]. The tokenizer is a required input.
Constructs a TrOCR processor which wraps a vision feature extractor and a TrOCR tokenizer into a single processor.
TrOCRProcessor offers all the functionalities of [ViTFeatureExtractor/DeiTFeatureExtractor] and
[RobertaTokenizer/XLMRobertaTokenizer]. See the call() and decode() for
more information.
When used in normal mode, this method forwards all its arguments to AutoFeatureExtractor’s
__call__()and returns its output. If used in the context
as_target_processor() this method forwards all its arguments to TrOCRTokenizer’s
__call__. Please refer to the doctsring of the above two methods for more information.
from_pretrained
< source >( pretrained_model_name_or_path **kwargs )
Parameters
-
pretrained_model_name_or_path (
stroros.PathLike) — This can be either:- a string, the model id of a pretrained feature_extractor hosted inside a model repo on
huggingface.co. Valid model ids can be located at the root-level, like
bert-base-uncased, or namespaced under a user or organization name, likedbmdz/bert-base-german-cased. - a path to a directory containing a feature extractor file saved using the
save_pretrained() method, e.g.,
./my_model_directory/. - a path or url to a saved feature extractor JSON file, e.g.,
./my_model_directory/preprocessor_config.json. **kwargs — Additional keyword arguments passed along to both from_pretrained() andfrom_pretrained.
- a string, the model id of a pretrained feature_extractor hosted inside a model repo on
huggingface.co. Valid model ids can be located at the root-level, like
Instantiate a processor associated with a pretrained model.
This class method is simply calling the feature extractor
from_pretrained() and the tokenizer
from_pretrained methods. Please refer to the docstrings of the
methods above for more information.
save_pretrained
< source >( save_directory push_to_hub: bool = False **kwargs )
Parameters
-
save_directory (
stroros.PathLike) — Directory where the feature extractor JSON file and the tokenizer files will be saved (directory will be created if it does not exist). -
push_to_hub (
bool, optional, defaults toFalse) — Whether or not to push your processor to the Hugging Face model hub after saving it.Using
push_to_hub=Truewill synchronize the repository you are pushing to withsave_directory, which requiressave_directoryto be a local clone of the repo you are pushing to if it’s an existing folder. Pass alongtemp_dir=Trueto use a temporary directory instead.kwargs — Additional key word arguments passed along to the push_to_hub() method.
Saves the attributes of this processor (feature extractor, tokenizer…) in the specified directory so that it can be reloaded using the from_pretrained() method.
This class method is simply calling save_pretrained() and
save_pretrained. Please refer to the docstrings of the methods
above for more information.
This method forwards all its arguments to TrOCRTokenizer’s batch_decode(). Please refer to the docstring of this method for more information.
This method forwards all its arguments to TrOCRTokenizer’s decode(). Please refer to the docstring of this method for more information.
Temporarily sets the tokenizer for processing the input. Useful for encoding the labels when fine-tuning TrOCR.
TrOCRForCausalLM
class transformers.TrOCRForCausalLM
< source >( config )
Parameters
- config (TrOCRConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
The TrOCR Decoder with a language modeling head. Can be used as the decoder part of EncoderDecoderModel and VisionEncoderDecoder.
This model inherits from PreTrainedModel. Check the superclass documentation for the generic methods the
library implements for all its model (such as downloading or saving, resizing the input embeddings, pruning heads
etc.)
This model is also a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >(
input_ids = None
attention_mask = None
encoder_hidden_states = None
encoder_attention_mask = None
head_mask = None
cross_attn_head_mask = None
past_key_values = None
inputs_embeds = None
labels = None
use_cache = None
output_attentions = None
output_hidden_states = None
return_dict = None
)
→
transformers.modeling_outputs.CausalLMOutputWithCrossAttentions or tuple(torch.FloatTensor)
Parameters
-
input_ids (
torch.LongTensorof shape(batch_size, sequence_length)) — Indices of input sequence tokens in the vocabulary. Padding will be ignored by default should you provide it.Indices can be obtained using
TrOCRTokenizer. See PreTrainedTokenizer.encode() and PreTrainedTokenizer.call() for details. -
attention_mask (
torch.Tensorof shape(batch_size, sequence_length), optional) — Mask to avoid performing attention on padding token indices. Mask values selected in[0, 1]:- 1 for tokens that are not masked,
- 0 for tokens that are masked.
-
encoder_hidden_states (
torch.FloatTensorof shape(batch_size, sequence_length, hidden_size), optional) — Sequence of hidden-states at the output of the last layer of the encoder. Used in the cross-attention if the model is configured as a decoder. -
encoder_attention_mask (
torch.FloatTensorof shape(batch_size, sequence_length), optional) — Mask to avoid performing attention on the padding token indices of the encoder input. This mask is used in the cross-attention if the model is configured as a decoder. Mask values selected in[0, 1]: -
head_mask (
torch.Tensorof shape(decoder_layers, decoder_attention_heads), optional) — Mask to nullify selected heads of the attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
-
cross_attn_head_mask (
torch.Tensorof shape(decoder_layers, decoder_attention_heads), optional) — Mask to nullify selected heads of the cross-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
-
past_key_values (
tuple(tuple(torch.FloatTensor)), optional, returned whenuse_cache=Trueis passed or whenconfig.use_cache=True) — Tuple oftuple(torch.FloatTensor)of lengthconfig.n_layers, with each tuple having 2 tensors of shape(batch_size, num_heads, sequence_length, embed_size_per_head)) and 2 additional tensors of shape(batch_size, num_heads, encoder_sequence_length, embed_size_per_head). The two additional tensors are only required when the model is used as a decoder in a Sequence to Sequence model.Contains pre-computed hidden-states (key and values in the self-attention blocks and in the cross-attention blocks) that can be used (see
past_key_valuesinput) to speed up sequential decoding.If
past_key_valuesare used, the user can optionally input only the lastdecoder_input_ids(those that don’t have their past key value states given to this model) of shape(batch_size, 1)instead of alldecoder_input_idsof shape(batch_size, sequence_length). -
labels (
torch.LongTensorof shape(batch_size, sequence_length), optional) — Labels for computing the masked language modeling loss. Indices should either be in[0, ..., config.vocab_size]or -100 (seeinput_idsdocstring). Tokens with indices set to-100are ignored (masked), the loss is only computed for the tokens with labels in[0, ..., config.vocab_size]. -
use_cache (
bool, optional) — If set toTrue,past_key_valueskey value states are returned and can be used to speed up decoding (seepast_key_values).- 1 for tokens that are not masked,
- 0 for tokens that are masked.
-
output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. -
output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. -
return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple.
Returns
transformers.modeling_outputs.CausalLMOutputWithCrossAttentions or tuple(torch.FloatTensor)
A transformers.modeling_outputs.CausalLMOutputWithCrossAttentions or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (TrOCRConfig) and inputs.
-
loss (
torch.FloatTensorof shape(1,), optional, returned whenlabelsis provided) — Language modeling loss (for next-token prediction). -
logits (
torch.FloatTensorof shape(batch_size, sequence_length, config.vocab_size)) — Prediction scores of the language modeling head (scores for each vocabulary token before SoftMax). -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings + one for the output of each layer) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the initial embedding outputs.
-
attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
-
cross_attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Cross attentions weights after the attention softmax, used to compute the weighted average in the cross-attention heads.
-
past_key_values (
tuple(tuple(torch.FloatTensor)), optional, returned whenuse_cache=Trueis passed or whenconfig.use_cache=True) — Tuple oftorch.FloatTensortuples of lengthconfig.n_layers, with each tuple containing the cached key, value states of the self-attention and the cross-attention layers if model is used in encoder-decoder setting. Only relevant ifconfig.is_decoder = True.Contains pre-computed hidden-states (key and values in the attention blocks) that can be used (see
past_key_valuesinput) to speed up sequential decoding.
Example:
>>> from transformers import VisionEncoderDecoderModel, TrOCRForCausalLM, ViTModel, TrOCRConfig, ViTConfig
>>> encoder = ViTModel(ViTConfig())
>>> decoder = TrOCRForCausalLM(TrOCRConfig())
# init vision2text model
>>> model = VisionEncoderDecoderModel(encoder=encoder, decoder=decoder)