Transformers documentation
ResNet
ResNet
Overview
The ResNet model was proposed in Deep Residual Learning for Image Recognition by Kaiming He, Xiangyu Zhang, Shaoqing Ren and Jian Sun. Our implementation follows the small changes made by Nvidia, we apply the stride=2 for downsampling in bottleneck’s 3x3 conv and not in the first 1x1. This is generally known as “ResNet v1.5”.
ResNet introduced residual connections, they allow to train networks with an unseen number of layers (up to 1000). ResNet won the 2015 ILSVRC & COCO competition, one important milestone in deep computer vision.
The abstract from the paper is the following:
Deeper neural networks are more difficult to train. We present a residual learning framework to ease the training of networks that are substantially deeper than those used previously. We explicitly reformulate the layers as learning residual functions with reference to the layer inputs, instead of learning unreferenced functions. We provide comprehensive empirical evidence showing that these residual networks are easier to optimize, and can gain accuracy from considerably increased depth. On the ImageNet dataset we evaluate residual nets with a depth of up to 152 layers---8x deeper than VGG nets but still having lower complexity. An ensemble of these residual nets achieves 3.57% error on the ImageNet test set. This result won the 1st place on the ILSVRC 2015 classification task. We also present analysis on CIFAR-10 with 100 and 1000 layers. The depth of representations is of central importance for many visual recognition tasks. Solely due to our extremely deep representations, we obtain a 28% relative improvement on the COCO object detection dataset. Deep residual nets are foundations of our submissions to ILSVRC & COCO 2015 competitions, where we also won the 1st places on the tasks of ImageNet detection, ImageNet localization, COCO detection, and COCO segmentation.
Tips:
- One can use AutoFeatureExtractor to prepare images for the model.
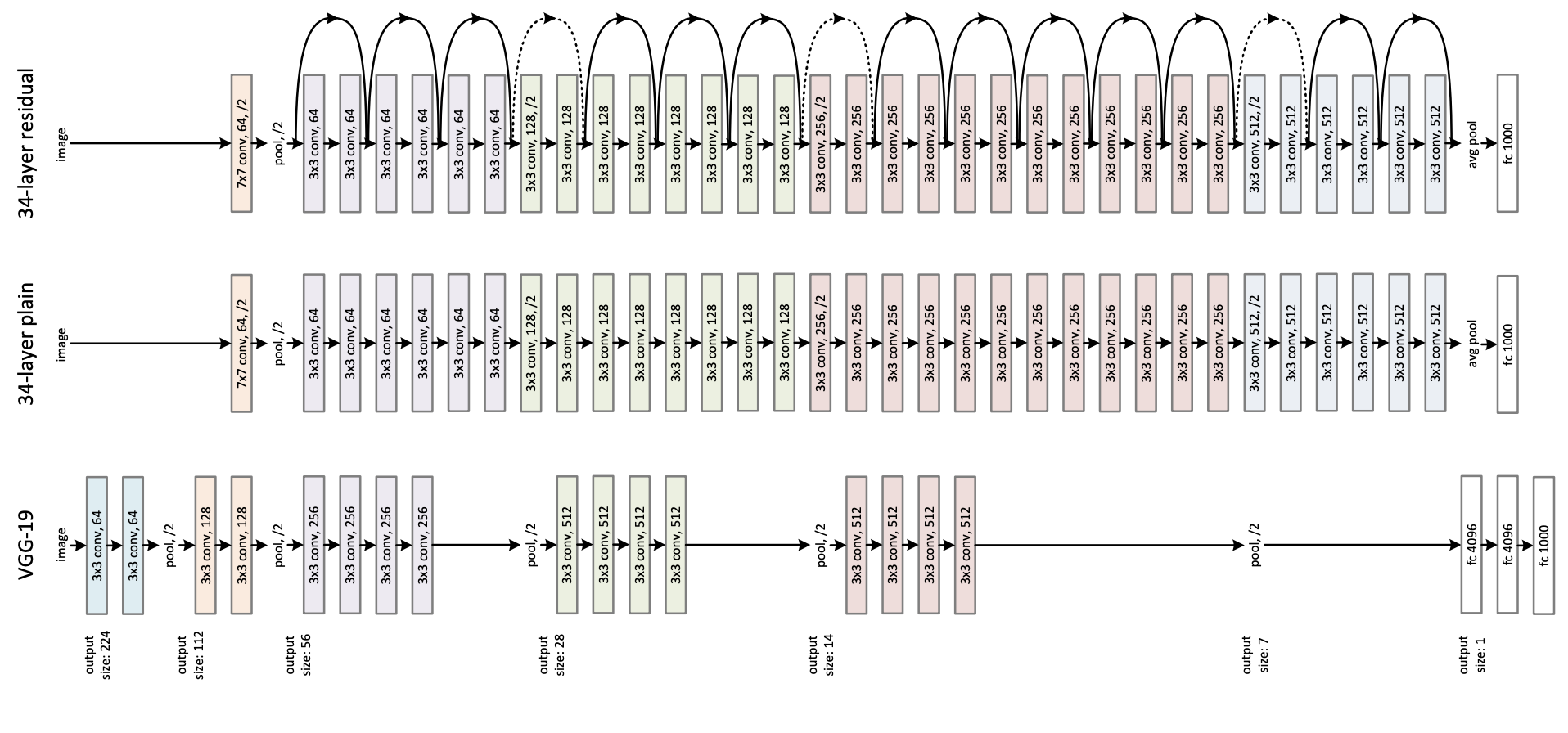
The figure below illustrates the architecture of ResNet. Taken from the original paper.
This model was contributed by Francesco. The original code can be found here.
ResNetConfig
class transformers.ResNetConfig
< source >( num_channels = 3 embedding_size = 64 hidden_sizes = [256, 512, 1024, 2048] depths = [3, 4, 6, 3] layer_type = 'bottleneck' hidden_act = 'relu' downsample_in_first_stage = False **kwargs )
Parameters
-
num_channels (
int, optional, defaults to 3) — The number of input channels. -
embedding_size (
int, optional, defaults to 64) — Dimensionality (hidden size) for the embedding layer. -
hidden_sizes (
List[int], optional, defaults to[256, 512, 1024, 2048]) — Dimensionality (hidden size) at each stage. -
depths (
List[int], optional, defaults to[3, 4, 6, 3]) — Depth (number of layers) for each stage. -
layer_type (
str, optional, defaults to"bottleneck") — The layer to use, it can be either"basic"(used for smaller models, like resnet-18 or resnet-34) or"bottleneck"(used for larger models like resnet-50 and above). -
hidden_act (
str, optional, defaults to"relu") — The non-linear activation function in each block. If string,"gelu","relu","selu"and"gelu_new"are supported. -
downsample_in_first_stage (
bool, optional, defaults toFalse) — IfTrue, the first stage will downsample the inputs using astrideof 2.
This is the configuration class to store the configuration of a ResNetModel. It is used to instantiate an ResNet model according to the specified arguments, defining the model architecture. Instantiating a configuration with the defaults will yield a similar configuration to that of the ResNet microsoft/resnet-50 architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
Example:
>>> from transformers import ResNetConfig, ResNetModel
>>> # Initializing a ResNet resnet-50 style configuration
>>> configuration = ResNetConfig()
>>> # Initializing a model from the resnet-50 style configuration
>>> model = ResNetModel(configuration)
>>> # Accessing the model configuration
>>> configuration = model.configResNetModel
class transformers.ResNetModel
< source >( config )
Parameters
- config (ResNetConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
The bare ResNet model outputting raw features without any specific head on top. This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >(
pixel_values: Tensor
output_hidden_states: typing.Optional[bool] = None
return_dict: typing.Optional[bool] = None
)
→
transformers.modeling_outputs.BaseModelOutputWithPoolingAndNoAttention or tuple(torch.FloatTensor)
Parameters
-
pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoFeatureExtractor. SeeAutoFeatureExtractor.__call__()for details. -
output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. -
return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple.
Returns
transformers.modeling_outputs.BaseModelOutputWithPoolingAndNoAttention or tuple(torch.FloatTensor)
A transformers.modeling_outputs.BaseModelOutputWithPoolingAndNoAttention or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (ResNetConfig) and inputs.
-
last_hidden_state (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Sequence of hidden-states at the output of the last layer of the model. -
pooler_output (
torch.FloatTensorof shape(batch_size, hidden_size)) — Last layer hidden-state after a pooling operation on the spatial dimensions. -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each layer) of shape(batch_size, num_channels, height, width).Hidden-states of the model at the output of each layer plus the optional initial embedding outputs.
The ResNetModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoFeatureExtractor, ResNetModel
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> feature_extractor = AutoFeatureExtractor.from_pretrained("microsoft/resnet-50")
>>> model = ResNetModel.from_pretrained("microsoft/resnet-50")
>>> inputs = feature_extractor(image, return_tensors="pt")
>>> with torch.no_grad():
... outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_state
>>> list(last_hidden_states.shape)
[1, 2048, 7, 7]ResNetForImageClassification
class transformers.ResNetForImageClassification
< source >( config )
Parameters
- config (ResNetConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
ResNet Model with an image classification head on top (a linear layer on top of the pooled features), e.g. for ImageNet.
This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >(
pixel_values: Tensor = None
labels: Tensor = None
output_hidden_states: bool = None
return_dict: bool = None
)
→
transformers.modeling_outputs.ImageClassifierOutputWithNoAttention or tuple(torch.FloatTensor)
Parameters
-
pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoFeatureExtractor. SeeAutoFeatureExtractor.__call__()for details. -
output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. -
return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. -
labels (
torch.LongTensorof shape(batch_size,), optional) — Labels for computing the image classification/regression loss. Indices should be in[0, ..., config.num_labels - 1]. Ifconfig.num_labels > 1a classification loss is computed (Cross-Entropy).
Returns
transformers.modeling_outputs.ImageClassifierOutputWithNoAttention or tuple(torch.FloatTensor)
A transformers.modeling_outputs.ImageClassifierOutputWithNoAttention or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (ResNetConfig) and inputs.
- loss (
torch.FloatTensorof shape(1,), optional, returned whenlabelsis provided) — Classification (or regression if config.num_labels==1) loss. - logits (
torch.FloatTensorof shape(batch_size, config.num_labels)) — Classification (or regression if config.num_labels==1) scores (before SoftMax). - hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each stage) of shape(batch_size, num_channels, height, width). Hidden-states (also called feature maps) of the model at the output of each stage.
The ResNetForImageClassification forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoFeatureExtractor, ResNetForImageClassification
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> feature_extractor = AutoFeatureExtractor.from_pretrained("microsoft/resnet-50")
>>> model = ResNetForImageClassification.from_pretrained("microsoft/resnet-50")
>>> inputs = feature_extractor(image, return_tensors="pt")
>>> with torch.no_grad():
... logits = model(**inputs).logits
>>> # model predicts one of the 1000 ImageNet classes
>>> predicted_label = logits.argmax(-1).item()
>>> print(model.config.id2label[predicted_label])
tiger cat