Deep RL Course documentation
A Q-Learning example
A Q-Learning example
To better understand Q-Learning, let’s take a simple example:

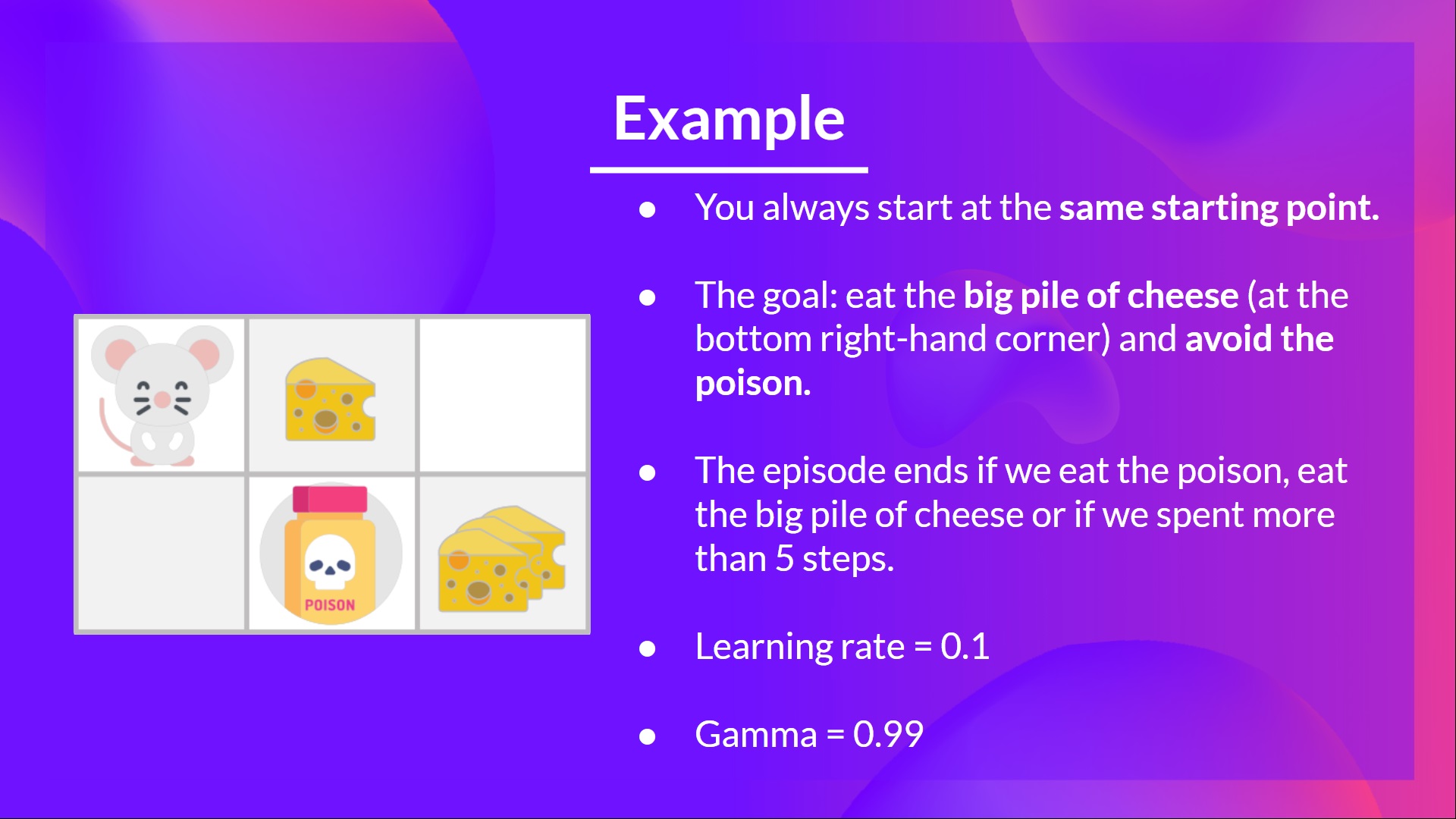
- You’re a mouse in this tiny maze. You always start at the same starting point.
- The goal is to eat the big pile of cheese at the bottom right-hand corner and avoid the poison. After all, who doesn’t like cheese?
- The episode ends if we eat the poison, eat the big pile of cheese, or if we take more than five steps.
- The learning rate is 0.1
- The discount rate (gamma) is 0.99
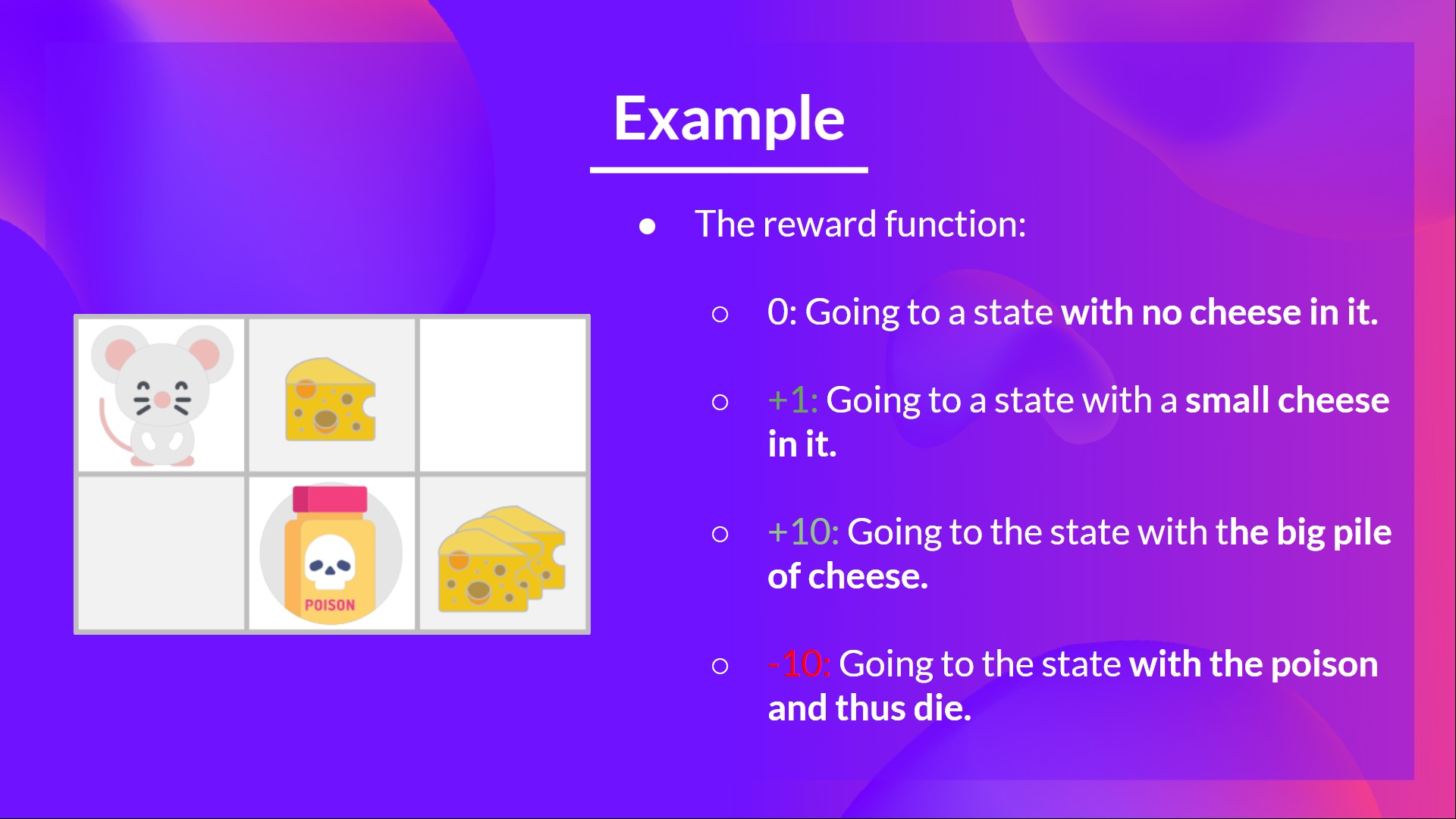
The reward function goes like this:
- +0: Going to a state with no cheese in it.
- +1: Going to a state with a small cheese in it.
- +10: Going to the state with the big pile of cheese.
- -10: Going to the state with the poison and thus dying.
- +0 If we take more than five steps.
To train our agent to have an optimal policy (so a policy that goes right, right, down), we will use the Q-Learning algorithm.
Step 1: Initialize the Q-table
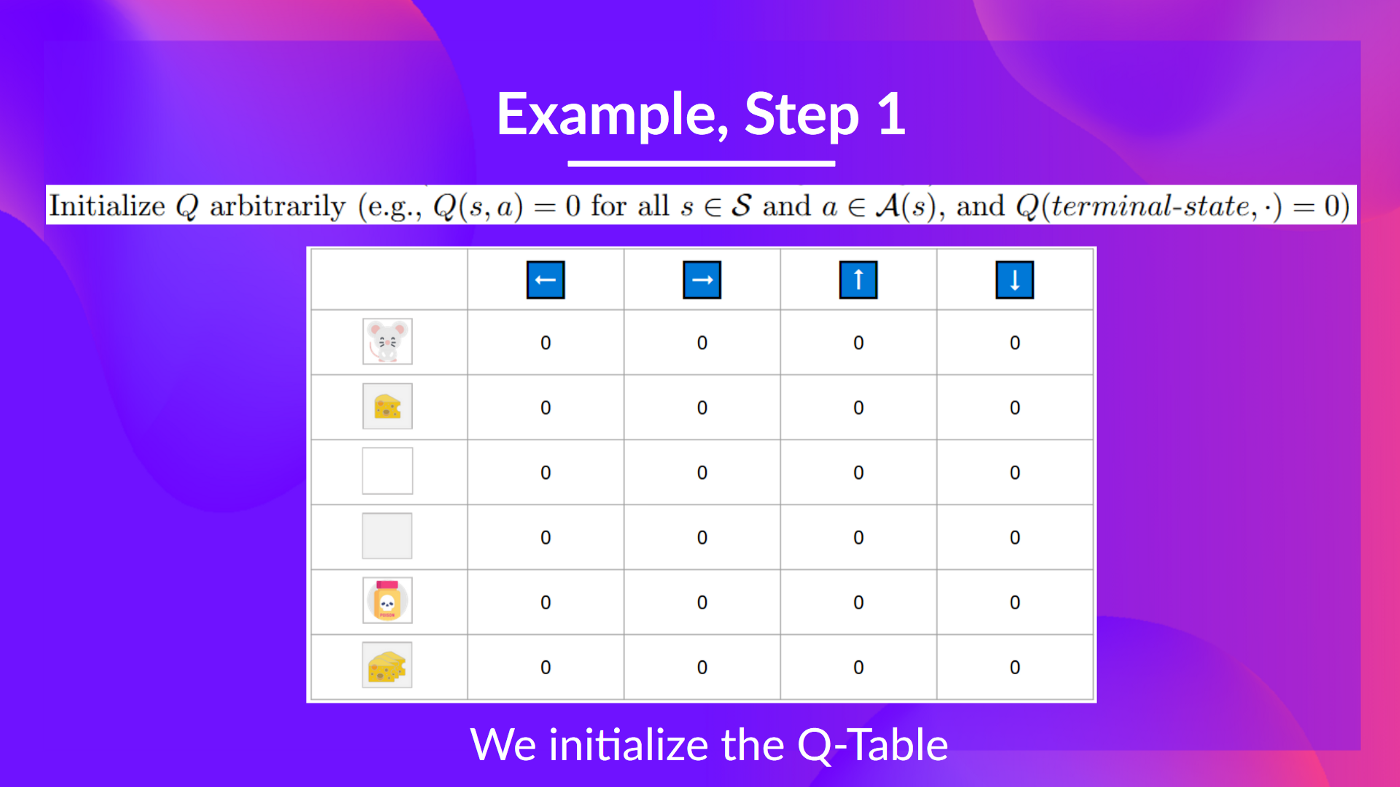
So, for now, our Q-table is useless; we need to train our Q-function using the Q-Learning algorithm.
Let’s do it for 2 training timesteps:
Training timestep 1:
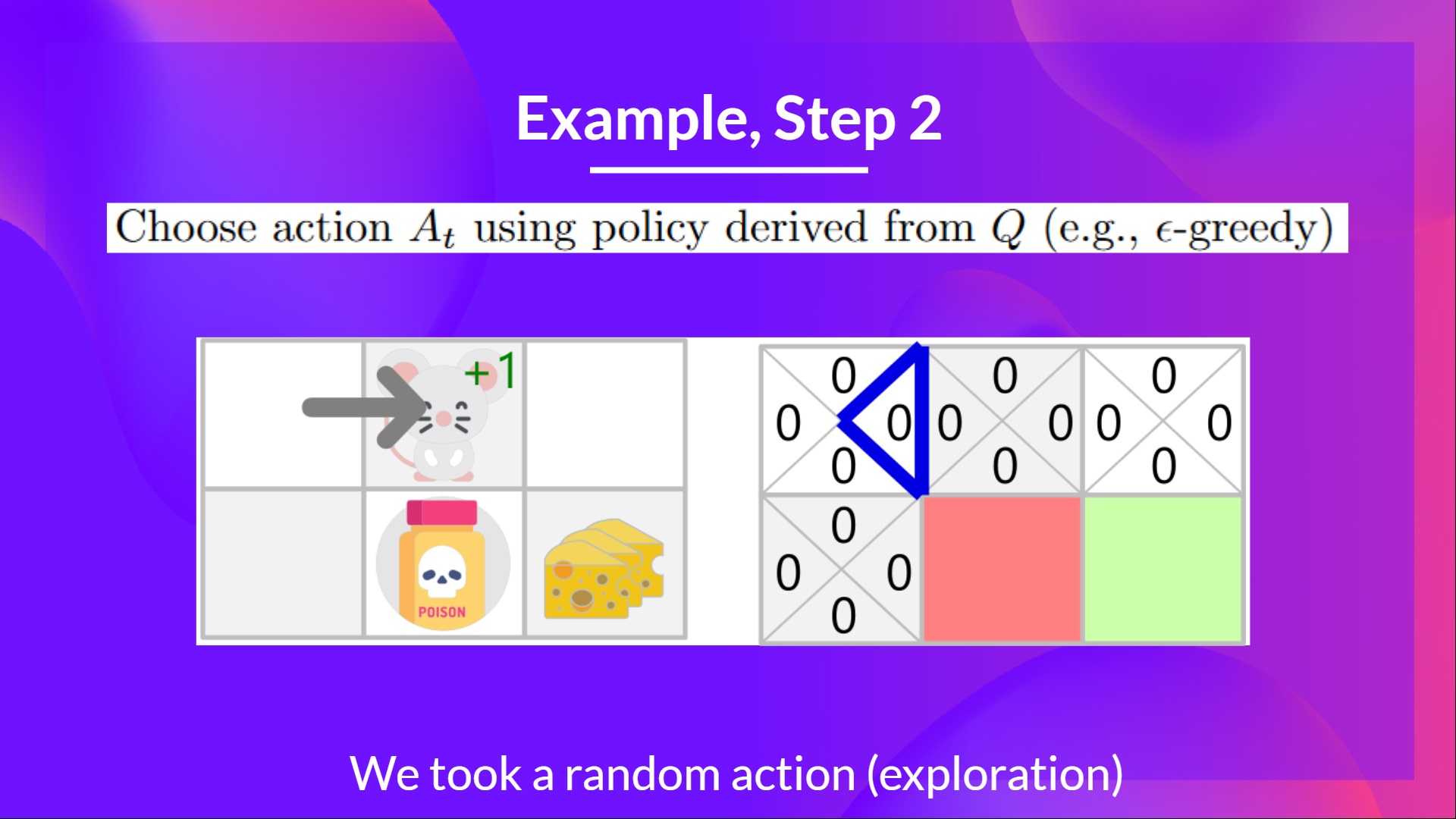
Step 2: Choose an action using the Epsilon Greedy Strategy
Because epsilon is big (= 1.0), I take a random action. In this case, I go right.
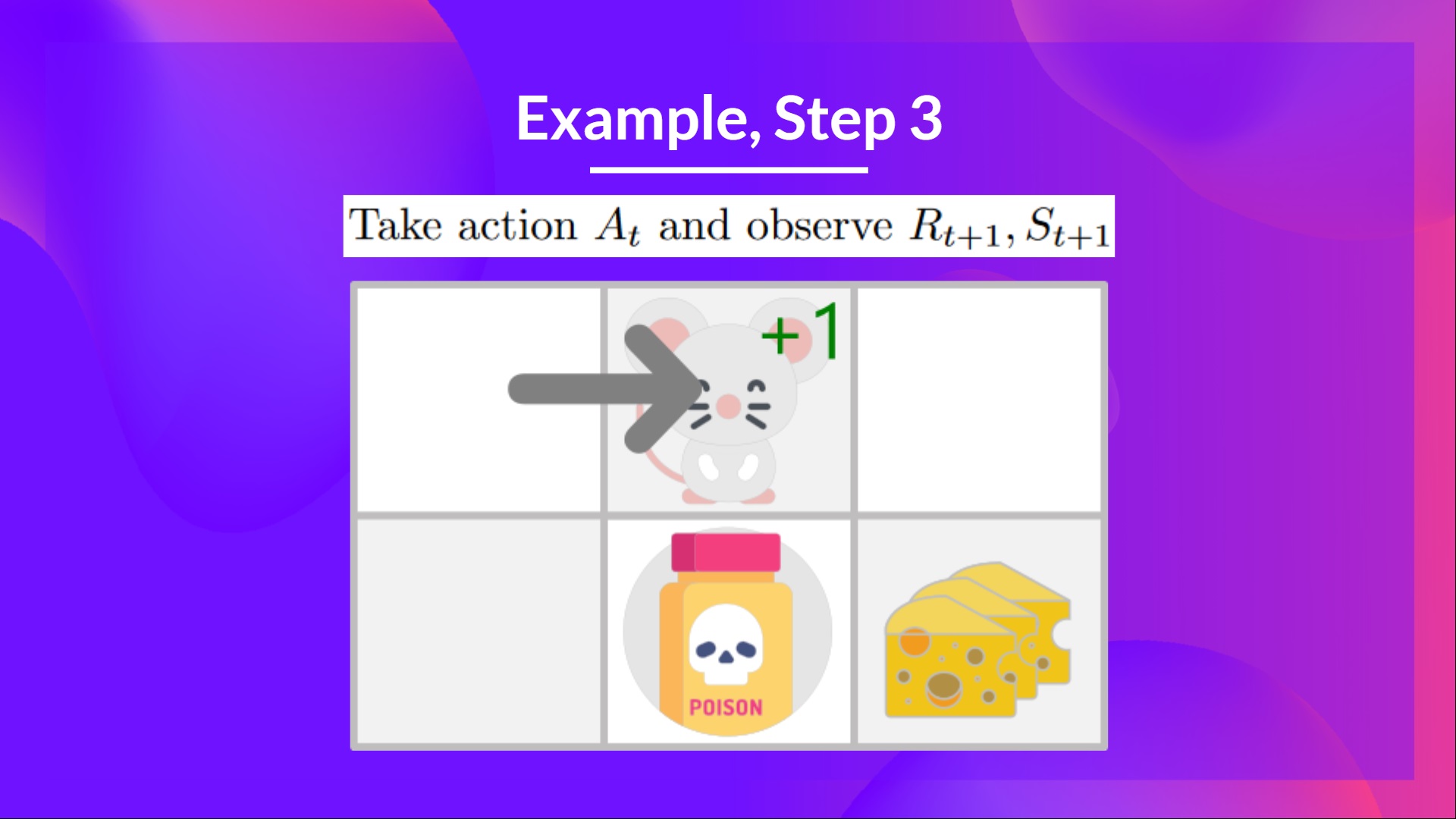
Step 3: Perform action At, get Rt+1 and St+1
By going right, I get a small cheese, so and I’m in a new state.
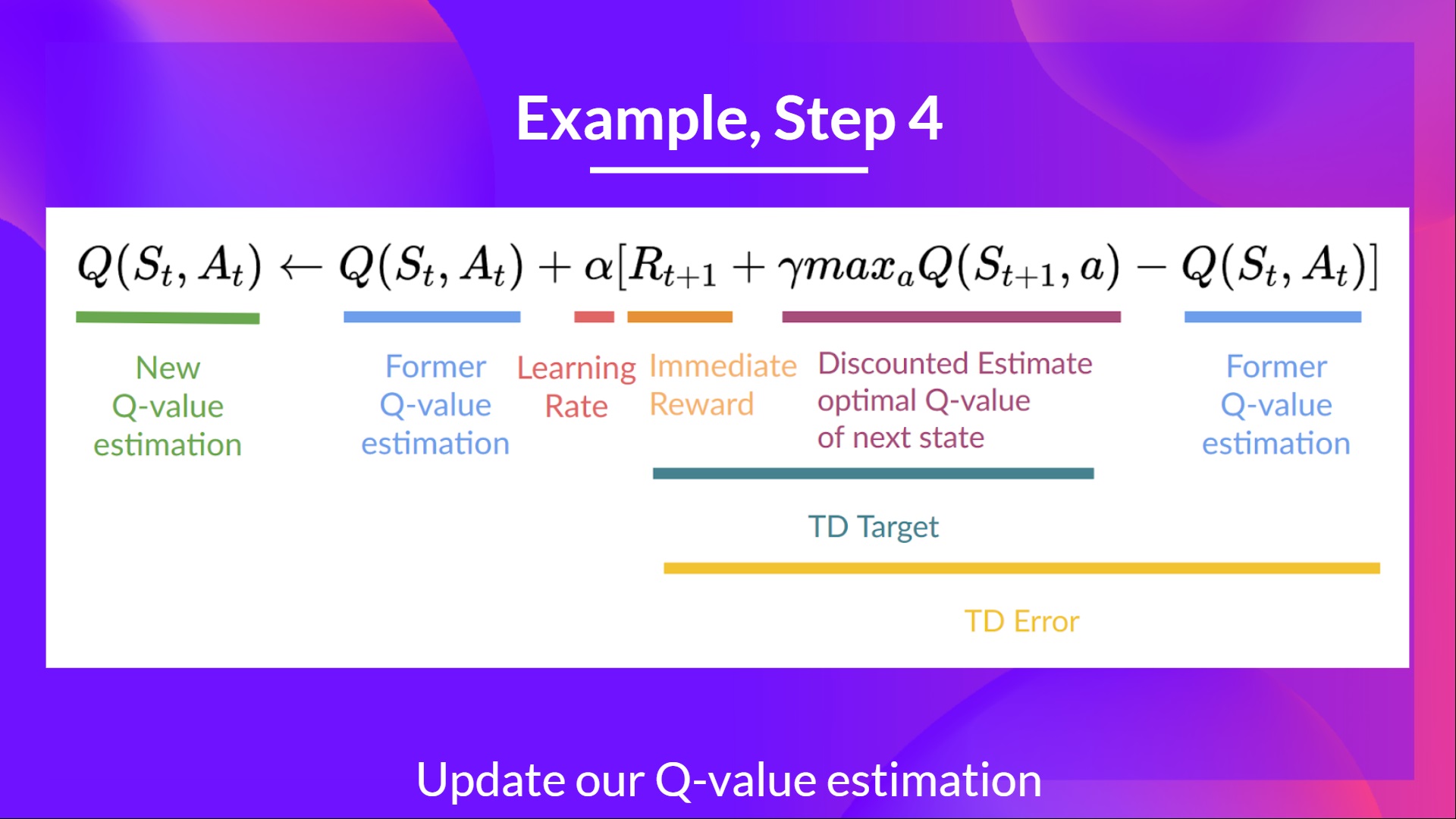
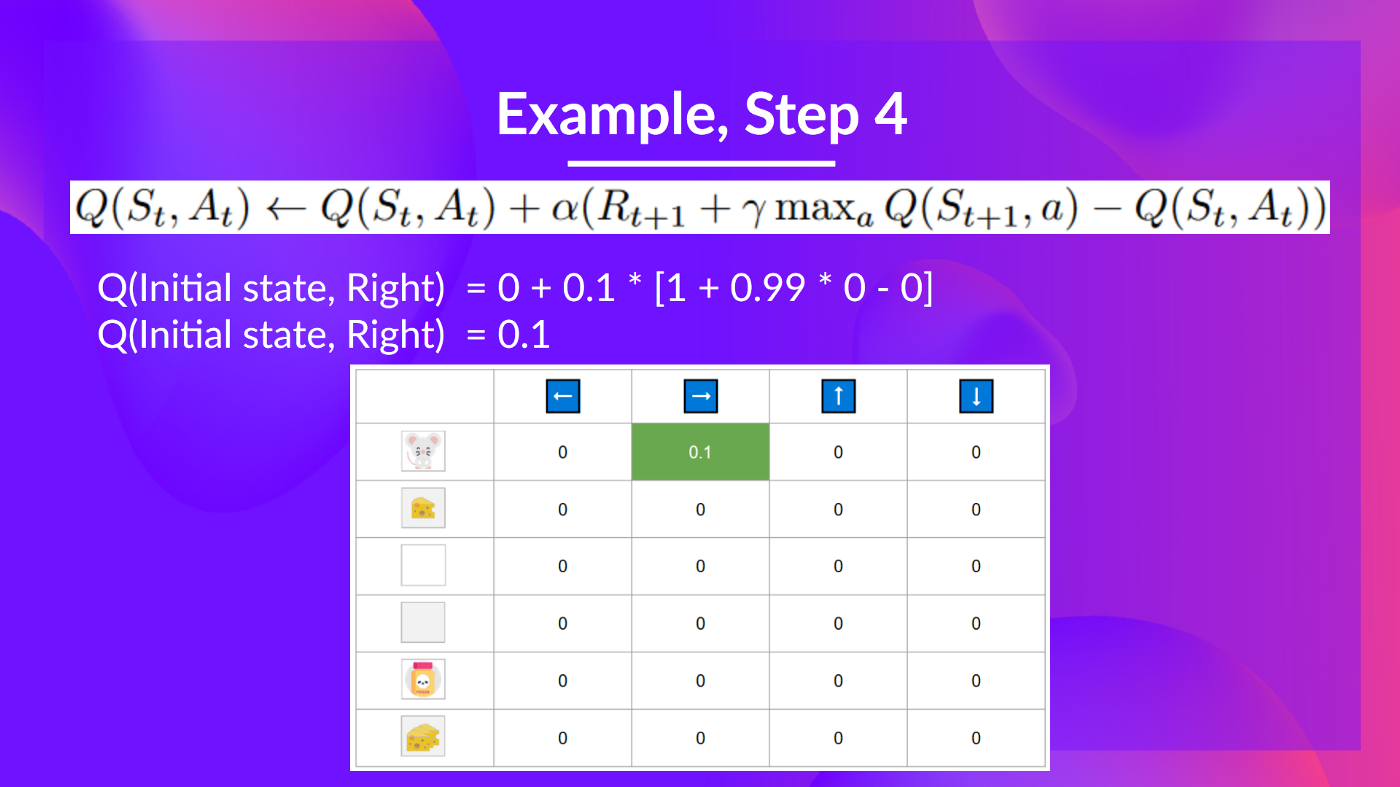
Step 4: Update Q(St, At)
We can now update using our formula.
Training timestep 2:
Step 2: Choose an action using the Epsilon Greedy Strategy
I take a random action again, since epsilon=0.99 is big. (Notice we decay epsilon a little bit because, as the training progress, we want less and less exploration).
I took the action ‘down’. This is not a good action since it leads me to the poison.
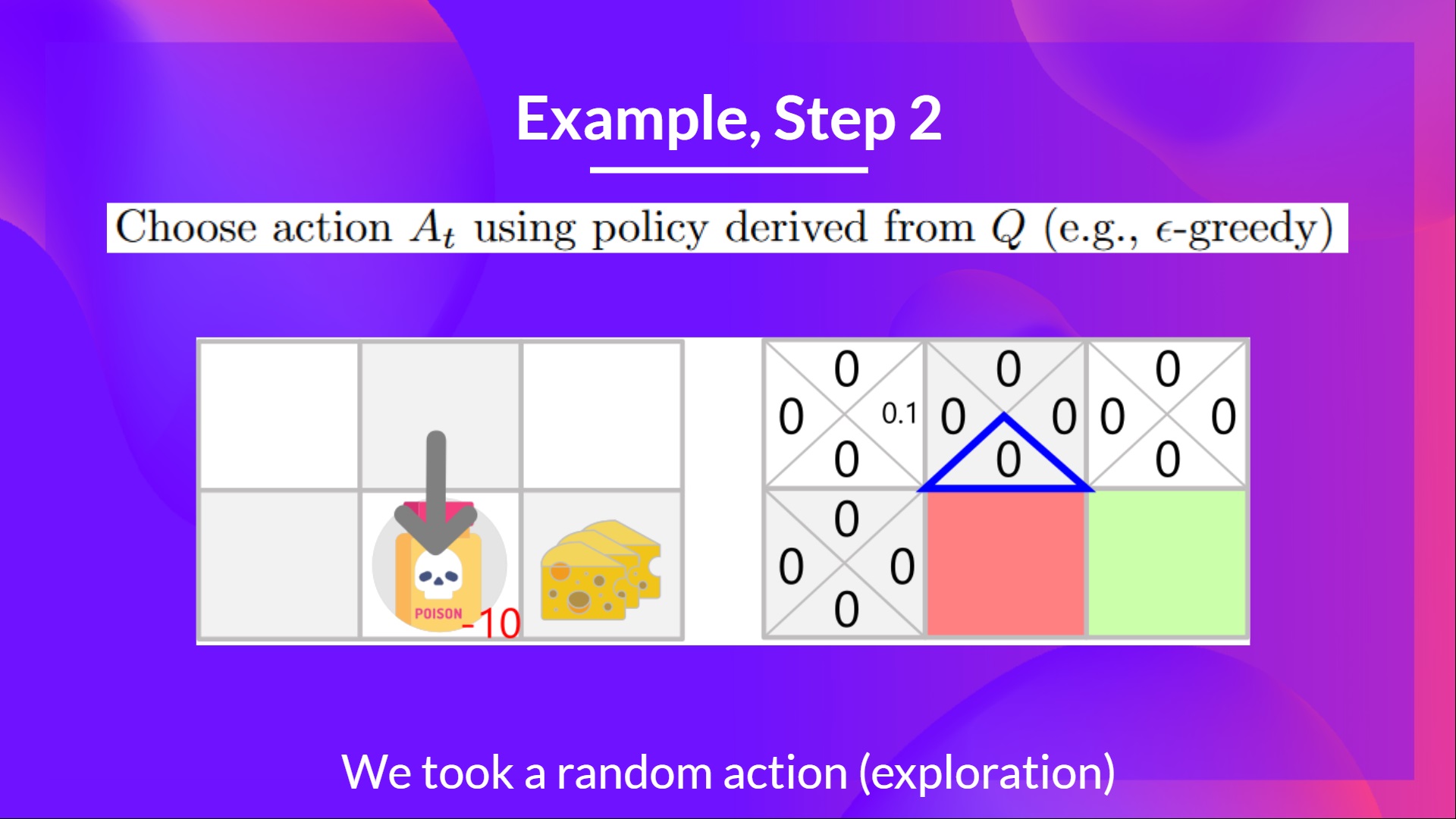
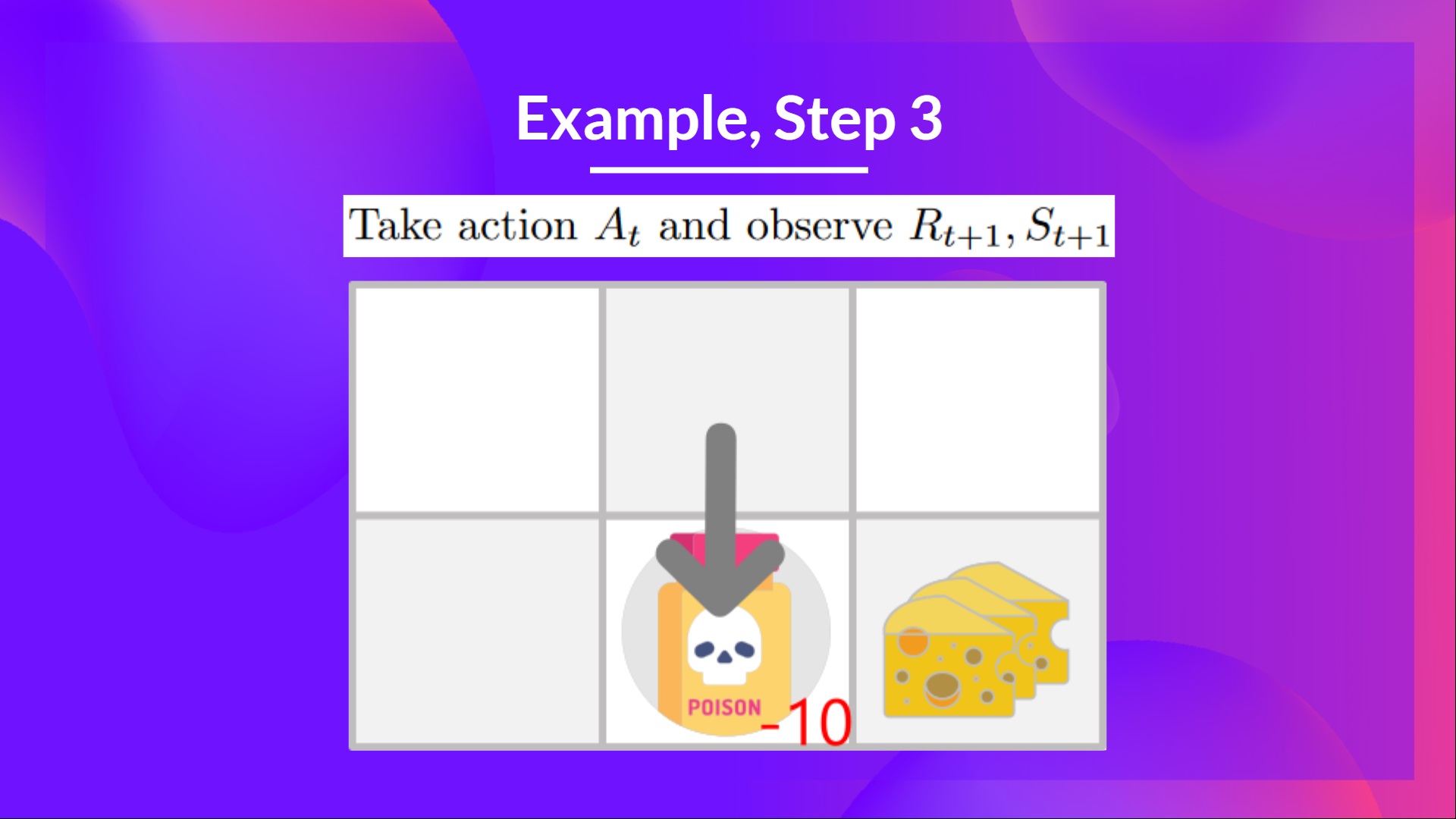
Step 3: Perform action At, get Rt+1 and St+1
Because I ate poison, I get, and I die.
Step 4: Update Q(St, At)
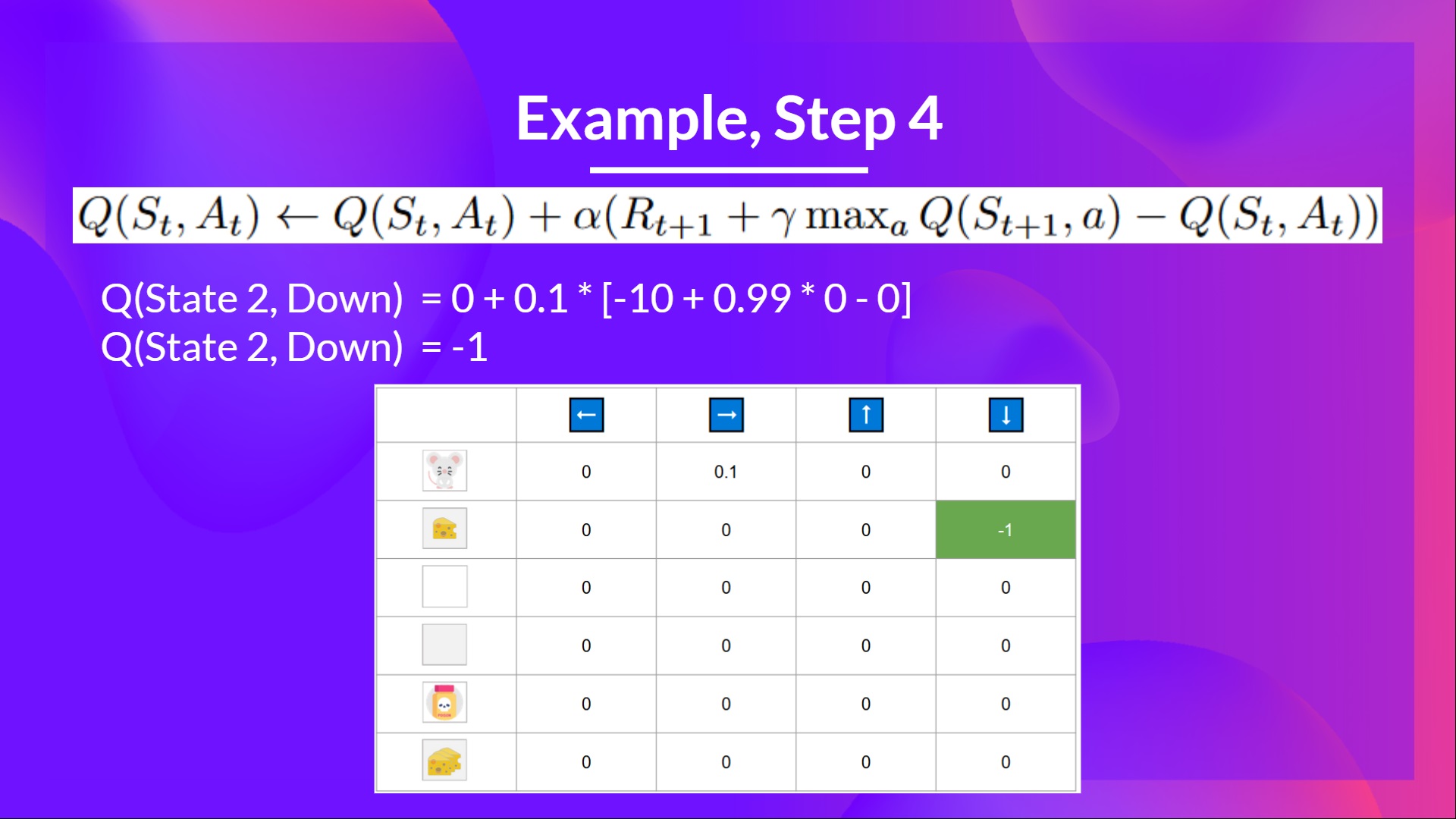
Because we’re dead, we start a new episode. But what we see here is that, with two explorations steps, my agent became smarter.
As we continue exploring and exploiting the environment and updating Q-values using the TD target, the Q-table will give us a better and better approximation. At the end of the training, we’ll get an estimate of the optimal Q-function.
< > Update on GitHub