Simulate documentation
Using 🤗 Simulate to learn Agent behaviors with Stable-Baselines3
Using 🤗 Simulate to learn Agent behaviors with Stable-Baselines3
We provide several example RL integrations with the Stable-Baselines3 (LINK) library. To install this dependancy use pip install simulate[sb3].
Including:
- Learning to navigate in a simple T-Maze
- Collecting objects
- Navigating in procedurally generated mazes
- Physical interaction with movable objects
- Reward functions based on line of sight observation of objects.
Learning to navigate in a simple T-Maze
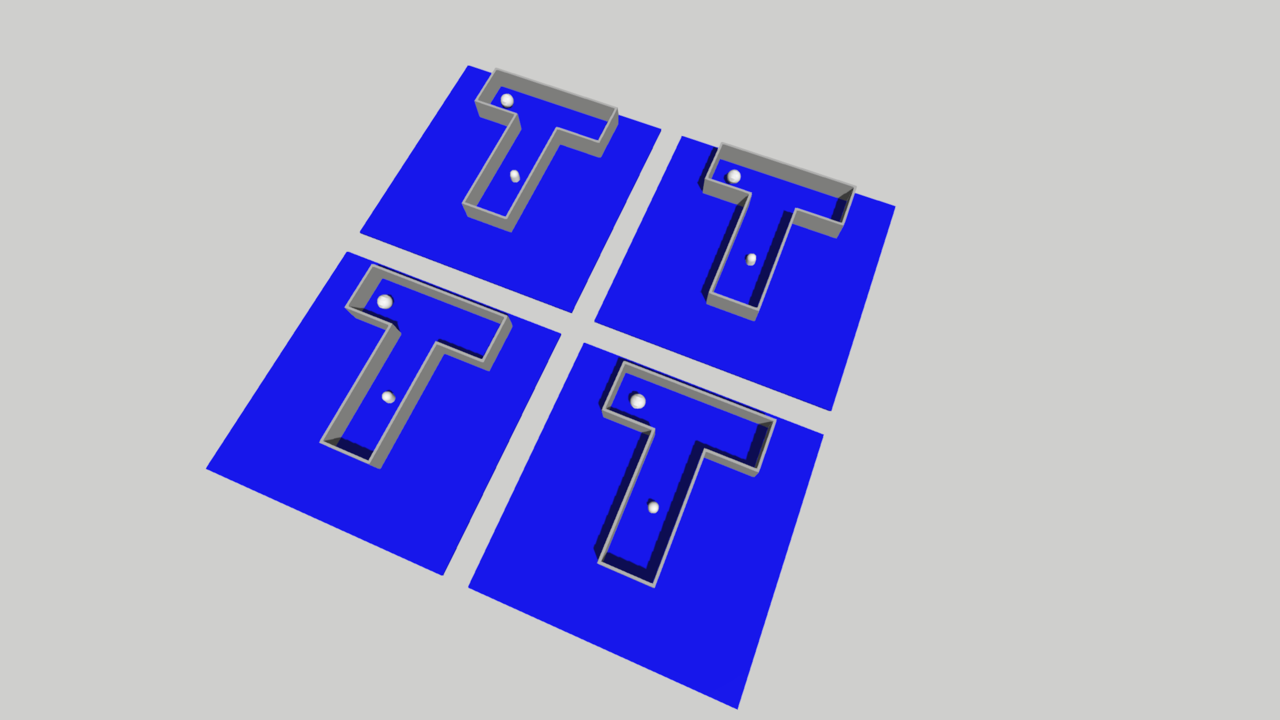
Example: sb3_basic_maze.py
Objective: Navigate to a spherical object in a simple T-Maze. Upon object collection, the environment resets.
Actors: An EgoCentric Camera Actor (LINK) equipped with a monocular camera.
Observation space:
- An RGB camera of shape (3, 40, 40) (C, H, W) in uint8 format.
Action space:
- A discrete action space with 3 possible actions
- Turn left 10 degrees
- Turn right 10 degrees
- Move forward
Reward function:
- A dense reward based on improvement in best euclidean distance to the object
- A sparse reward of +1 when the object is collected
- A timeout penaly of -1 if the agent does not reach the object in 200 time-steps
Parallel: 4 independent instances of the same environment configuration.
Collecting objects
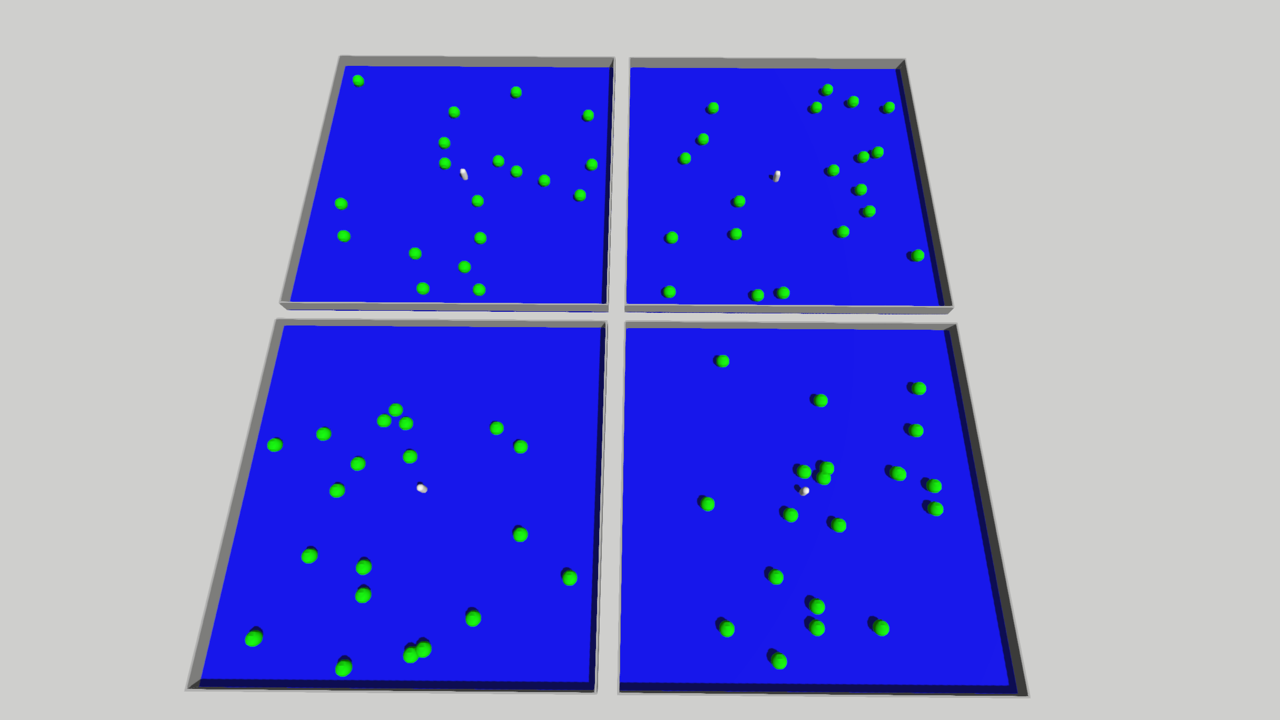
Example: sb3_collectables.py
Objective: Collect all 20 objects in a large square room.
Actors: An EgoCentric Camera Actor (LINK) equipped with a monocular camera.
Observation space:
- An RGB camera of shape (3, 40, 40) (C, H, W) in uint8 format.
Action space:
- A discrete action space with 3 possible actions
- Turn left 10 degrees
- Turn right 10 degrees
- Move forward
Reward function:
- A sparse reward of +1 when an object is collected
- A timeout penaly of -1 if the agent does not reach the object in 500 time-steps
Parallel: 4 independent instances of the same environment configuration.
Navigating in procedurally generated mazes
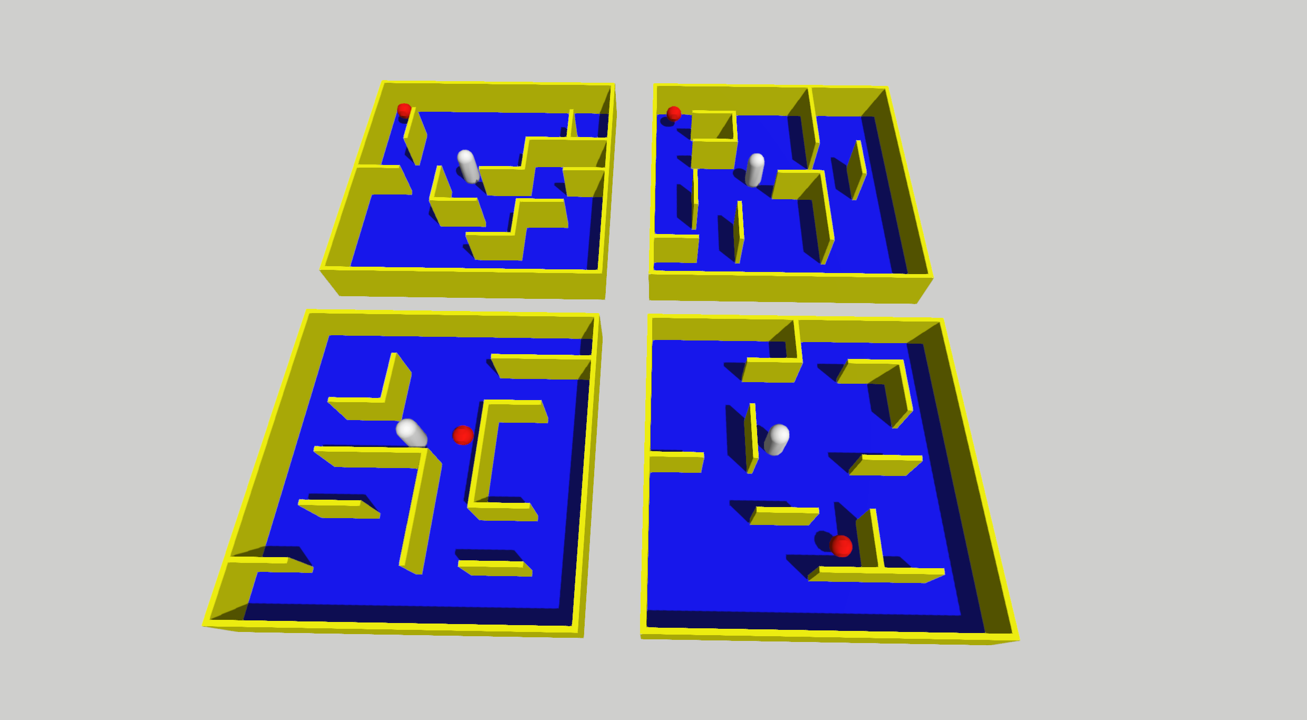
Example: sb3_procgen.py
Objective: Navigate to an object in a 3D maze, when the object is collected the environment resets.
Actors: An EgoCentric Camera Actor (LINK) equipped with a monocular camera
Observation space:
- An RGB camera of shape (3, 40, 40) (C, H, W) in uint8 format.
Action space:
- A discrete action space with 3 possible actions
- Turn left 10 degrees
- Turn right 10 degrees
- Move forward
Reward function:
- A sparse reward of +1 when the object is reached
- A timeout penaly of -1 if the agent does not reach the object in 500 time-steps
Parallel: 4 independent instances of randomly generated environment configurations.
Physical interaction with movable objects
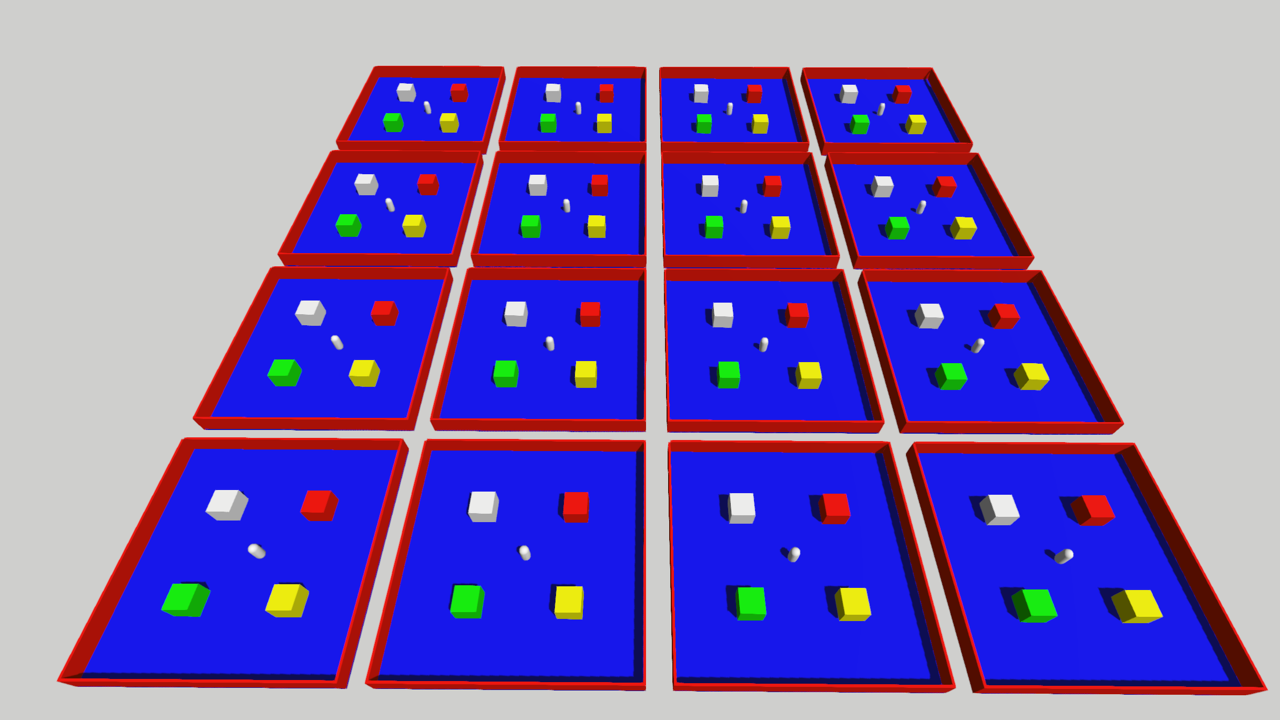
Example: sb3_move_boxes.py
Objective: Push boxes in a room near to each other.
Actors: An EgoCentric Camera Actor (LINK) equipped with a monocular camera
Observation space:
- An RGB camera of shape (3, 40, 40) (C, H, W) in uint8 format.
Action space:
- A discrete action space with 3 possible actions
- Turn left 10 degrees
- Turn right 10 degrees
- Move forward
Reward function:
- A reward for moving the red and yellow boxes close to eachother
- A reward for moving the green and white boxes close to eachother
- A timeout penaly of -1 if the agent does not reach the object in 100 time-steps
Parallel: 16 independent instances of the same environment configuration.
Reward functions based on line of sight observation of objects.
Example: sb3_visual_reward.py
Objective: Move the agent so the box is within the agents its field of view
Actors: An EgoCentric Camera Actor (LINK) equipped with a monocular camera
Observation space:
- An RGB camera of shape (3, 40, 40) (C, H, W) in uint8 format.
Action space:
- A discrete action space with 3 possible actions
- Turn left 10 degrees
- Turn right 10 degrees
- Move forward
Reward function:
- A sparse reward for moving the box within a 60 degree fov cone in front of the agent.
- A timeout penaly of -1 if the agent does not reach the object in 100 time-steps
Parallel: 4 independent instances of the same environment configuration.