Datasets:

File size: 23,847 Bytes
adae7ea b63af31 abbff03 b63af31 abbff03 b63af31 |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 |
---
license: cc
task_categories:
- robotics
- object-detection
language:
- en
tags:
- Autonomous Racing
- Autonomous Vehicles
- Perception
pretty_name: racecar
size_categories:
- 10K<n<100K
---
# RACECAR Dataset
Welcome to the RACECAR dataset!
The RACECAR dataset is the first open dataset for full-scale and high-speed autonomous racing. Multi-modal sensor data has been collected from fully autonomous Indy race cars operating at speeds of up to 170 mph (273 kph).
Six teams who raced in the [Indy Autonomous Challenge](https://www.indyautonomouschallenge.com) during 2021-22 have contributed to this dataset.
The dataset spans 11 interesting racing scenarios across two race tracks which include solo laps, multi-agent laps, overtaking situations, high-accelerations, banked tracks, obstacle avoidance, pit entry and exit at different speeds.
The data is organized and released in both ROS2 and nuScenes format. We have also developed the ROS2-to-nuScenes conversion library to achieve this.
The RACECAR data is unique because of the high-speed environment of autonomous racing and is suitable to explore issues regarding localization, object detection and tracking (LiDAR, Radar, and Camera), and mapping that arise at the limits of operation of the autonomous vehicle.
### [RACECAR Data Video Demo:]
<a href="http://www.youtube.com/watch?v=h3pEPBt8iaY" target="_blank">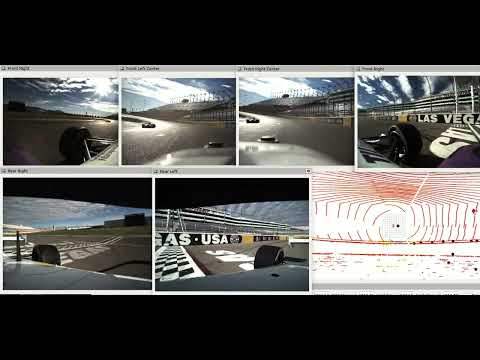</a>
This repository describes how the data was collected, how to download the data, its format and organization in ROS2 and NuScenes, as well as helper scripts used to parse the dataset, custom ros messages describing GNSS/IMU/Radar data, and a conversion script that converts ros2 bags to <a href="https://www.nuscenes.org/nuscenes" target="_blank">nuScenes</a> json files.
## Overview
- [Data Collection](#data-collection)
- [Data Usage and Availability](#data-usage-and-availability)
- [Data Usage and Licensce](#data-usage-and-license)
- [Citation](#citation)
- [Availability](#availability)
- [Data Organization](#data-organization)
- [Scenario Description](#scenario-description)
- [Coordinate Conventions](#coordinate-conventions)
- [RACECAR ROS2 - Data Structure](#racecar-ros2---data-structure)
- [Folder Structure](#folder-structure)
- [Data Processing](#data-processing)
- [Topic List](#topic-list)
- [RACECAR nuScenes - Data Structure](#racecar-nuscenes---data-structure)
- [Folder Structure](#folder-structure-1)
- [Tutorials](#tutorials)
- [Tutorial 1: Visualization](#tutorial-1-ros2-visualization)
- [Custom ROS2 Messages](#installation-of-custom-ros2-messages)
- [RVIZ](#visualization-in-rviz)
- [Tutorial 2: Localization](#tutorial-2-ros2-localization)
- [Tutorial 3: nuScenes](#tutorial-3-nuscenes-jupyter-notebook)
- [Acknowledgements](#acknowledgement)
## Data Collection
The RACECAR dataset is compiled by contributions from
several teams, all of whom competed in the inaugural season
of the Indy Autonomous Challenge during 2021-22. Nine
university teams participated in two races. The first race was
held at the Indianapolis Motor Speedway (IMS) track in
Indiana, USA in October 2021, and the second race was held at Las Vegas Motor
Speedway (LVMS) in January 2022. At IMS, teams reached speeds up to
150 mph on straights and 136 mph in turns, competing in
solo vehicle time trials and obstacle avoidance. At LVMS,
teams participated in a head-to-head overtaking competition
reaching speeds in excess of 150 mph, with the fastest
overtake taking place at 170 mph.
The AV-21 Indy Lights vehicle is outfitted
with three radars, six pinhole cameras, and three solid-
state LiDARs. Each of the sensor modalities covers a 360-
degree field of view around the vehicle. For localization,
the vehicle is equipped with two sets of high-precision
Real-Time Kinematic (RTK) GNSS receivers and IMU.
The nine teams that participated were:
|Team|Initial|
|----|-------|
|Black and Gold Autonomous Racing|B|
|TUM Autonomous Motorsport|T|
|KAIST|K|
|PoliMOVE|P|
|TII EuroRacing|E|
|AI Racing Tech|H|
|MIT-PITT-RW|M|
|Cavalier Autonomous Racing|C|
|Autonomous Tiger Racing|A|
## Data Usage and Availability
### Data Usage and License
This work is licensed under the Creative Commons Attribution-NonCommercial 4.0 International Public License (CC BY-NC 4.0). To obtain a copy of this license, see LICENSE-CC-BY-NC-4.0.txt in the archive, visit CreativeCommons.org or send a letter to Creative Commons, PO Box 1866, Mountain View, CA 94042, USA.
Under the following terms:
Attribution — You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
NonCommercial — You may not use the material for commercial purposes.
No additional restrictions — You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
### Citation
Please refer to our [paper](https://arxiv.org/abs/2306.03252) for more information and cite it if you use it in your research.
```
@conference{racecar2023,
title={RACECAR - The Dataset for High-Speed Autonomous Racing},
author={Amar Kulkarni and John Chrosniak and Emory Ducote and Florian Sauerbeck and Andrew Saba and Utkarsh Chirimar and John Link and Marcello Cellina and Madhur Behl},
year={2023},
month={October},
booktitle={International Conference on Intelligent Robots and Systems (IROS)},
publisher={IEEE/RSJ}
}
```
### Availability
#### AWS S3 Bucket
Both the ROS2 and nuScenes datasets are available on [AWS S3](https://aws.amazon.com/s3/).
- AWS Bucket Name: **s3://racecar-dataset**
- Region: **us-west-2**
The bucket is organized by
(RACECAR-ROS2)
1. Dataset Format (`RACECAR-ROS2` or `RACECAR-nuScenes`)
2. Scenario (`S1`, `S2`,...,`S11`)
3. Scene ('M-MULTI-SLOW_KAIST', 'E-SOLO-FAST-100-140', etc.)
(RACECAR-nuScenes)
1. Dataset Format (`RACECAR-ROS2` or `RACECAR-nuScenes`)
2. Category ('MULTI-FAST', 'MULTI-SLOW',etc)
**Download using AWS Command Line Interface (Recommended)**
Multiple objects or folders can be downloaded using the AWS CLI. See these instructions for [installing AWS CLI v2](https://docs.aws.amazon.com/cli/latest/userguide/install-cliv2.html).
Example download usage:
```
aws s3 cp s3://racecar-dataset/RACECAR-ROS2/S5/M-MULTI-SLOW-KAIST . --recursive --no-sign-request
```
This command will download the corresponding rosbag2 folder containing the metadata and db3 file.
**Download using URL**
Only individual objects can be downloaded using URLs, making them inconvenient for downloading rosbags.
Example URL:
* https://racecar-dataset/RACECAR-nuScenes/metadata.tar
## Data Organization
The dataset is released in both the <a href="https://github.com/ros2/rosbag2" target="_blank">rosbag2</a> and nuScenes format. Under the dataset root directory, two folders seperate the [ROS2](#folder-structure) and [nuScenes](#folder-structure-1) directories.
```
├── data
│ ├── RACECAR nuScenes
│ ├── RACECAR
```
## Scenario Description
Each recorded autonomous run is classified by a scenario description. This indicates the speed range of the run, the track the run takes place, and whether or not the run is multi-agent. Also specified are which teams contributed to each scenario.
|Scenario|Track|Description|Speeds|Teams*|
|----------|----------|-----------|-----------|-------|
|S<sub>1</sub>|LVMS|Solo Slow Lap|\< 70 mph|C, M, P|
|S<sub>2</sub>|LVMS|Solo Slow Lap|70-100 mph|C,M|
|S<sub>3</sub>|LVMS|Solo Fast Lap|100-140 mph|E,M|
|S<sub>4</sub>|LVMS|Solo Fast Lap|\> 140 mph|E,T|
|S<sub>5</sub>|LVMS|Multi-Agent Slow|\< 100 mph|C,E,K,M,P,T|
|S<sub>6</sub>|LVMS|Multi-Agent Fast|\> 130 mph|E,T|
|S<sub>7</sub>|IMS|Solo Slow Lap|\< 70 mph|C|
|S<sub>8</sub>|IMS|Solo Slow Lap|70-100 mph||
|S<sub>9</sub>|IMS|Solo Fast Lap|100-140 mph|E,T|
|S<sub>10</sub>|IMS|Solo Fast Lap|\> 140 mph|P|
|S<sub>11</sub>|IMS|Pylon Avoidance|\< 70 mph|T|
\* C - Cavalier, E - EuroRacing, K - KAIST, M - MIT-PITT-RW, P - PoliMove, T - TUM
## Coordinate Conventions
The novatel pwrpak7 used to collect GNSS measurements on the AV21 uses a Y-forward, X-right, Z-up coordinate convention. Exact measurements and orientation can be found [here](https://docs.novatel.com/OEM7/Content/Technical_Specs_Receiver/PwrPak7_Mechanicals.htm).
Due to cabling considerations, the placement of the unit is rotated 180 degrees around the Z-axis in the vehicle. Therefore orientation measurements coming from topics such as `novatel_oem7_msgs/msg/BESTVEL`, must be rotated 180 degrees in order to correctly correspond to the YXZ convention.
The accompanying Unified Robotics Description Format (urdf) has a coordinate convention of X-forward, Y-left, Z-up. In order to properly match with this convention, orientation and velocity measurements (from the IMU for example) should be rotated a subsequent 90 degrees counter-clockwise. A 90 degree clockwise rotation will equate to the same series of transformations.

We have taken into account these rotations in the `local_odometry` topic, but if you desire to use the raw measurements to do your own sensor fusion or filtering, please take these orientations into account.
The accompanying urdf, located in `racecar_utils/urdf` contains joints for every sensor on the car, as well as the approximate center of gravity. These were measured during the initial assembly of the car.

## RACECAR ROS2 - Data Structure
### Folder Structure
```
RACECAR
├── S1
│ ├── C_SOLO-SLOW-70
│ │ ├── metadata.yaml
│ │ └── SOLO-SLOW-70.db3
│ ├── M_SOLO-SLOW-70
│ │ ├── metadata.yaml
│ │ └── SOLO-SLOW-70.db3
│ └── P_SOLO-SLOW-70
│ ├── metadata.yaml
│ └── SOLO-SLOW-70.db3
...
├── S6
│ ├── E_MULTI-FAST-TUM
│ │ ├── metadata.yaml
│ │ └── MULTI-FAST-TUM.db3
│ ├── T_MULTI-FAST-EURO
│ │ ├── metadata.yaml
│ │ └── MULTI-FAST-EURO.db3
│ └── T_MULTI-FAST-POLI
│ ├── metadata.yaml
│ └── MULTI-FAST-POLI.db3
```
The ROS2 folder structure is organized by scenario, with each scenario folder containing a collection of rosbags. The rosbags are named corresponding to contributing racing team and a short scenario description. Inside the rosbag are the typical metadata and sqlite files.
```
TEAM_DESCRIPTION
```
### Data Processing
The ROS2 data was parsed and processed using python utility scripts located in `racecar_py`. You can use these [scripts](racecar_py) as a baseline for doing your own bag conversion or coordiante system transformations.
### Topic List
All topics in the dataset are namespaced by their vehicle number. Each rosbag contains all sensor data available from the ego vehicle, and if a multi-agent label is included, it will be present as an `nav_msgs/msg/Odometry` topic named `local_odometry`.
If additional namespacing or merging is required, a script is included in the racecar_utils folder called `rosbag_merger`. The inbuilt rosbag2 cli tools available in ROS2 Humble are also useful for performing bag merging and conversion.
|Topic Name|Topic Type|Description|
|----------|----------|-----------|
**Camera Topics**
|`camera/xxx/camera_info`| `sensor_msgs/msg/CameraInfo`|Distortion parameters and Intrinsic Camera Matrix|
|`camera/xxx/image/compressed`| `sensor_msgs/msg/CompressedImage`|Compressed camera image buffer and compression format|
**LIDAR Topics**
|`luminar_points`| `sensor_msgs/msg/PointCloud2`|Merge LiDAR point cloud from all three sensors|
|`luminar_xxx_points`| `sensor_msgs/msg/PointCloud2`|LiDAR point cloud corresponding to xxx sensor|
**GNSS Topics**
|`novatel_xxx/bestgnsspos`| `novatel_oem7_msgs/msg/BESTPOS`|Best available GNSS solution from Novatel PwrPak. Measurement located at antenna phase center transmitted at 20 Hz|
|`novatel_xxx/bestpos`| `novatel_oem7_msgs/msg/BESTPOS`|Best available GNSS solution from Novatel PwrPak. Measurement located at antenna phase center transmitted at 20 Hz|
|`novatel_xxx/bestvel`| `novatel_oem7_msgs/msg/BESTVEL`|Velocity derived from differentiated position. Uses the same solution method from BESTPOS transmitted at 20 Hz|
|`novatel_xxx/heading2`| `novatel_oem7_msgs/msg/HEADING2`|Heading derived from alignment of dual antenna system at variable rate|
|`novatel_xxx/oem7raw`| `novatel_oem7_msgs/msg/Oem7RawMsg`|Binary data received from Novatel receivers before driver processing|
|`novatel_xxx/rawimu`| `novatel_oem7_msgs/msg/RAWIMU`|Accelerometer and Gyroscope data transmitted from receiver at 125 Hz|
|`novatel_xxx/rawimux`| `sensor_msgs/msg/Imu`|Accelerometer and Gyroscope data transmitted from receiver at 125 Hz|
|`novatel_xxx/time`| `novatel_oem7_msgs/msg/TIME`|Satellite time accompanying GNSS packets|
**Radar Topics**
|`radar_front/esr_status1`| `delphi_esr_msgs/msg/EsrStatus1`||
|`radar_front/esr_status2`| `delphi_esr_msgs/msg/EsrStatus2`||
|`radar_front/esr_status3`| `delphi_esr_msgs/msg/EsrStatus3`||
|`radar_front/esr_status4`| `delphi_esr_msgs/msg/EsrStatus4`||
|`radar_front/esr_status5`| `delphi_esr_msgs/msg/EsrStatus5`||
|`radar_front/esr_status6`| `delphi_esr_msgs/msg/EsrStatus6`||
|`radar_front/esr_status7`| `delphi_esr_msgs/msg/EsrStatus7`||
|`radar_front/esr_status8`| `delphi_esr_msgs/msg/EsrStatus8`||
|`radar_front/esr_track`| `delphi_esr_msgs/msg/EsrTrack`|Radar detection|
|`radar_front/esr_valid1`| `delphi_esr_msgs/msg/EsrValid1`||
|`radar_front/esr_valid2`| `delphi_esr_msgs/msg/EsrValid2`||
|`radar_front/esr_vehicle1`| `delphi_esr_msgs/msg/EsrVehicle1`||
|`radar_front/esr_vehicle2`| `delphi_esr_msgs/msg/EsrVehicle2`||
|`radar_front/from_can_bus`| `can_msgs/msg/Frame`|Raw CAN data received from Aptiv ESR Radar|
|`radar_front/to_can_bus`| `can_msgs/msg/Frame`|Raw CAN data sent to Aptiv ESR Radar|
|`radar_front/radar_visz_moving`| `visualization_msgs/msg/Marker`|Visualization of radar detection|
|`radar_front/radar_visz_static`| `visualization_msgs/msg/Marker`|Visualization of radar detection|
|`radar_xxx/marker`| `visualization_msgs/msg/Marker`|Visualization of radar detection|
|`radar_xxx/detection`| `delphi_mrr_msgs/msg/Detection`|Detection from Aptiv MRR Radar|
**Vehicle Positions**
|`local_odometry`| `nav_msgs/msg/Odometry`|Vehicle odometry in Cartesian coordinates derived from RTK GNSS solution|
Topic placeholders `xxx` refer to the specific sensor. For the cameras there is:
- `front_left`
- `front_right`
- `front_left_center`
- `front_right_center`
- `rear_left`
- `rear_right`
For LIDAR:
- `luminar_front_points`
- `luminar_left_points`
- `luminar_right_points`
For GNSS:
- `novatel_top`
- `novatel_bottom`
## RACECAR nuScenes - Data Structure
We have also released the dataset in the [nuScenes format](https://www.nuscenes.org/nuscenes) for easier accessibility to those unfamiliar with ROS2. The conversion process is done using the [rosbag2nuscenes](https://github.com/linklab-uva/rosbag2nuscenes/tree/main) conversion tool.

### Folder Structure
The nuScenes dataset is structured as follows:
```
RACECAR nuScenes
├── v1.0-mini
│ ├── scene.json
│ ├── log.json
│ ├── map.json
│ ├── sample.json
│ ├── sample_data.json
│ ├── ego_pose.json
│ ├── calibrated_sensor.json
│ ├── sensor.json
│ ├── instance.json
│ ├── sample_annotation.json
│ ├── category.json
│ ├── attribute.json
│ └── visibility.json
├── samples
│ ├── SENSOR1
│ │ ├── data(.png, .pcd, .pcd.bin)
│ │ └── ...
│ └── SENSOR2
│ ├── data(.png, .pcd, .pcd.bin)
│ └── ...
├── sweeps
│ ├── SENSOR1
│ │ ├── data(.png, .pcd, .pcd.bin)
│ │ └── ...
│ └── SENSOR2
│ ├── data(.png, .pcd, .pcd.bin)
│ └── ...
```
For more information on the contents of each JSON file, please refer to [the nuScenes documentation](https://www.nuscenes.org/nuscenes#data-format).
Our nuScenes schema deviates slightly from the original. First, we have classified each ROS2 bag as a scene rather than splitting each bag into twenty second intervals. We believe the longer scene intervals (typically over 10 mins) widen opportunities for exploration into mapping and localization problems.
Second, our dataset has no entries in the Annotation or Taxonomy JSON files due to the absence of annotations. These files are still present but have dummy entires to maintain compatibilty with the [Python nuScenes development kit](https://pypi.org/project/nuscenes-devkit/).
Each scene in this format is seperated by the same [Scenario](#scenario-description) classification as the rosbags.
[This guide](TODO) provides a walkthrough of how to explore the nuScenes release using the Python development kit. Similar to the nuScenes release, we have batched the sensor data from each scene into separate tarballs to allow users to only download the data they are interested in working with. Each tarball follows the naming convention of `{TEAM_NAME}_{BAG NAME}.tar.gz`.
## Tutorials
### Tutorial 1: ROS2 Visualization
#### Requirements
All code was tested with the following environment.
- Linux (tested on Ubuntu 20.04/22.04)
- Python 3.8+
For `racecar_utils` please install the following.
- ROS2 (<a href="https://docs.ros.org/en/galactic/Installation.html" target="_blank">Galactic</a>/<a href="https://docs.ros.org/en/humble/Installation.html" target="_blank">Humble</a>)
- <a href="https://eigen.tuxfamily.org/index.php?title=Main_Page" target="_blank">Eigen3</a>
#### Installation of Custom ROS2 Messages
The `delphi_esr_msgs`, `novatel_oem7_msgs`, and `novatel_gps_msgs` are the radar and gps messages obtained from the Autonomous Stuff and Novatel drivers. Install these packages in order to parse the radar and novatel custom messages in the dataset. They are all located in the `ros2_custom_msgs` directory.
- novatel_oem7_msgs
- novatel_gps_msgs
- delphi_esr_msgs
- can_msgs
First create a dev workspace that looks like the following. This will be our working directory.
```
├── data
│ └── RACECAR
└── racecar_ws
├── conversion_configs
├── urdf
├── racecar_py
├── racecar_utils
├── ros2_custom_msgs
└── rosbag2nuscenes
```
In the working directory source your ROS2 installation, and build the packages in `racecar_utils` and `ros2_custom_msgs`. Source the installation folder in the working directory to then use the installed messages.
```
source /opt/ros/${ROS_DISTRO}/setup.bash
colcon build
source install/setup.bash
```
The `can_msgs` package should be available via apt.
```
sudo apt install ros-${ROS_DISTRO}-can-msgs
```
#### Visualization in RVIZ
When replaying a bag, it is recommended to publish the ego vehicles odometry as part of the tf tree, in order to visualize it's position and sensor data in reference to the inertial map frame.
We have provided an example node `odom_to_tf.cpp`, that takes in the `local_odometry` topics from both the ego and opponenet vehicles and publishes them to the tf tree. It is important to have the ego vehicle's frame match up with the appropriate frame in the URDF so that LiDAR and Radar point clouds can be easily visualized.
The node and accompanying launch file should be built along with `racecar_utils`. To run, use the launch file and use the provided parameters to remap the odometry topic names appropriately. Click the following image to see an example of the RVIZ visualization.
```
ros2 launch racecar_utils odom_to_tf.launch.py ego_topic:=/vehicle_3/local_odometry opp_topic:=/vehicle_5/local_odometry
```
[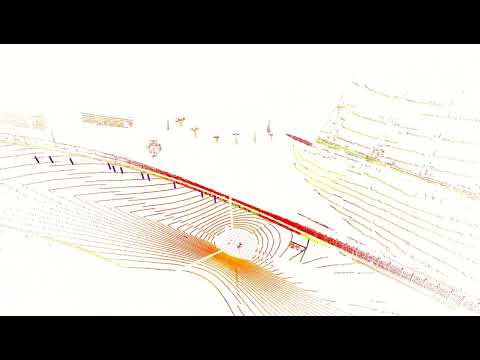](http://www.youtube.com/watch?v=5KDiXADwiO8 "RACECAR Dataset - GPS Labels of LiDAR")
**Camera RVIZ**
We have also provided an RVIZ config for visualizing camera images from the bags.
```
./racecar_utils/rviz/cameras.rviz
```

Please note that this RVIZ configuration is set to show the images from all six bag topics in the format `camera_idX_imageU8`, which is different from the specified camera topics above. If you would like to visualize other camera topics, you may simply change the topic information in the RVIZ configuration.
### Tutorial 2: ROS2 Localization
An example of using the dataset is creating a more robust localization method than just using GPS. If you have examined a few of the scenarios, you may notice that there are occasional message drops, spikes in GNSS standard deviation, or small abrubt shifts in reported position. For accurate object detection, having smooth unfettered orientation estimates is very useful, so we will implement a simple extended kalman filter in order to filter through these noisy measurements.
An open source package, `robot_localization` which is shipped as part of the full ROS2 installation will suffice to fuse measurements from a GNSS receiver, and an IMU. Install the package with the following command. For additional details about using the package, please reference the [repository documentation](https://github.com/cra-ros-pkg/robot_localization/blob/ros2/doc/configuring_robot_localization.rst) directly.
```
sudo apt install ros-${ROS_DISTRO}-robot-localization
```
In order to use the extended kalman filter, we must transform our inputs into standard message types, and make sure they are in a common coordinate system. Please see [Coordinate Conventions](#coordinate-conventions) for the required rotations. Using the `convert_imu` node, we convert the `novatel_oem7_msgs/msg/RAWIMU` message to the standard `sensor_msgs/msg/Imu` which feeds into `robot_localization`. The `local_odometry` topic is already a stantard message type, and does not need to be adjusted.
We provide a simple configuration file `config/ekf.yaml` which instructs the ekf node to subscribe to the `local_odometry` topic, and the frame corrected IMU topics.
To run the example, source the workspace and run your selected bag using a clock message. Subsequently run the provided launch file
```
ros2 bag play YOUR/BAG/HERE --clock 100.0
```
```
ros2 launch racecar_utils localization.launch.py ns:=vehicle_x use_sim_time:=true
```
Using a different motion model, tweaking the sensor measurement covariances, and adjusting which inputs are used, are all methods to gain more stable performance from the filter.
### Tutorial 3: nuScenes jupyter notebook
For a full walkthrough of using the nuScenes devkit and loading and visualizing the RACECAR data using it, please refer to this [jupyter notebook](nuscenes_tutorial.ipynb).
## Acknowledgement
The RACECAR data would not be possible without the efforts and contributions of the following individuals.
Amar Kulkarni, John Chrosniak, Emory Ducote, Utkarsh Chirimar, John Link, Madhur Behl, Andrew Shehab Saha, Calvin Chanyoung Jung, Andrea Tecozzi, Marcello Cellina, Giulio Panzani, Matteo Corno, Phillip Karle, Florian Sauerbeck, Sebastian Huch, Maximilian Geisslinger, Felix Fent, Micaela Verucchi, Ayoub Raji, Danilo Caporale, Francesco Gatti. |