Deep RL Course documentation
Introducing the Clipped Surrogate Objective Function
Introducing the Clipped Surrogate Objective Function
Recap: The Policy Objective Function
Let’s remember what the objective is to optimize in Reinforce:
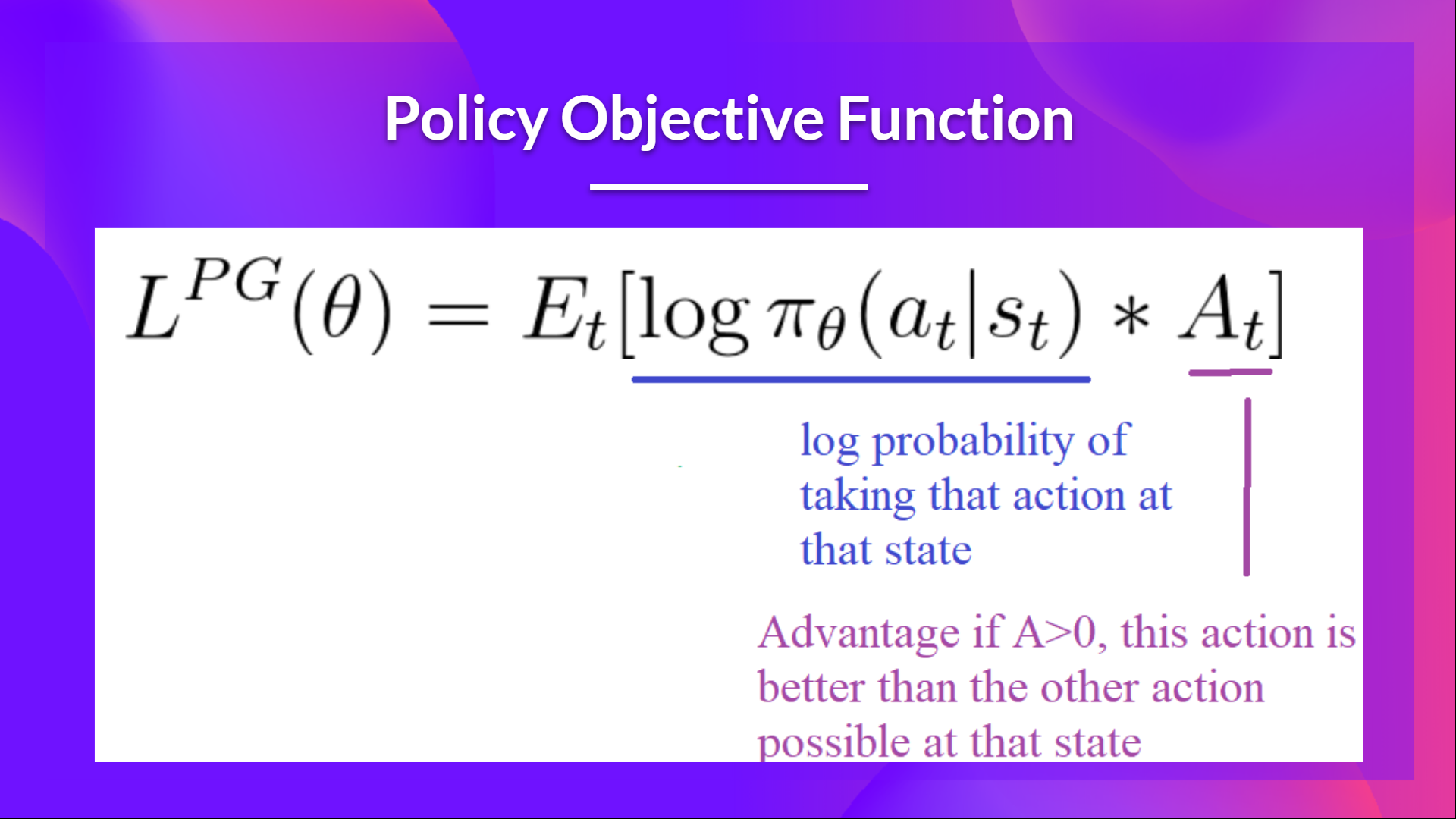
The idea was that by taking a gradient ascent step on this function (equivalent to taking gradient descent of the negative of this function), we would push our agent to take actions that lead to higher rewards and avoid harmful actions.
However, the problem comes from the step size:
- Too small, the training process was too slow
- Too high, there was too much variability in the training
With PPO, the idea is to constrain our policy update with a new objective function called the Clipped surrogate objective function that will constrain the policy change in a small range using a clip.
This new function is designed to avoid destructively large weights updates :
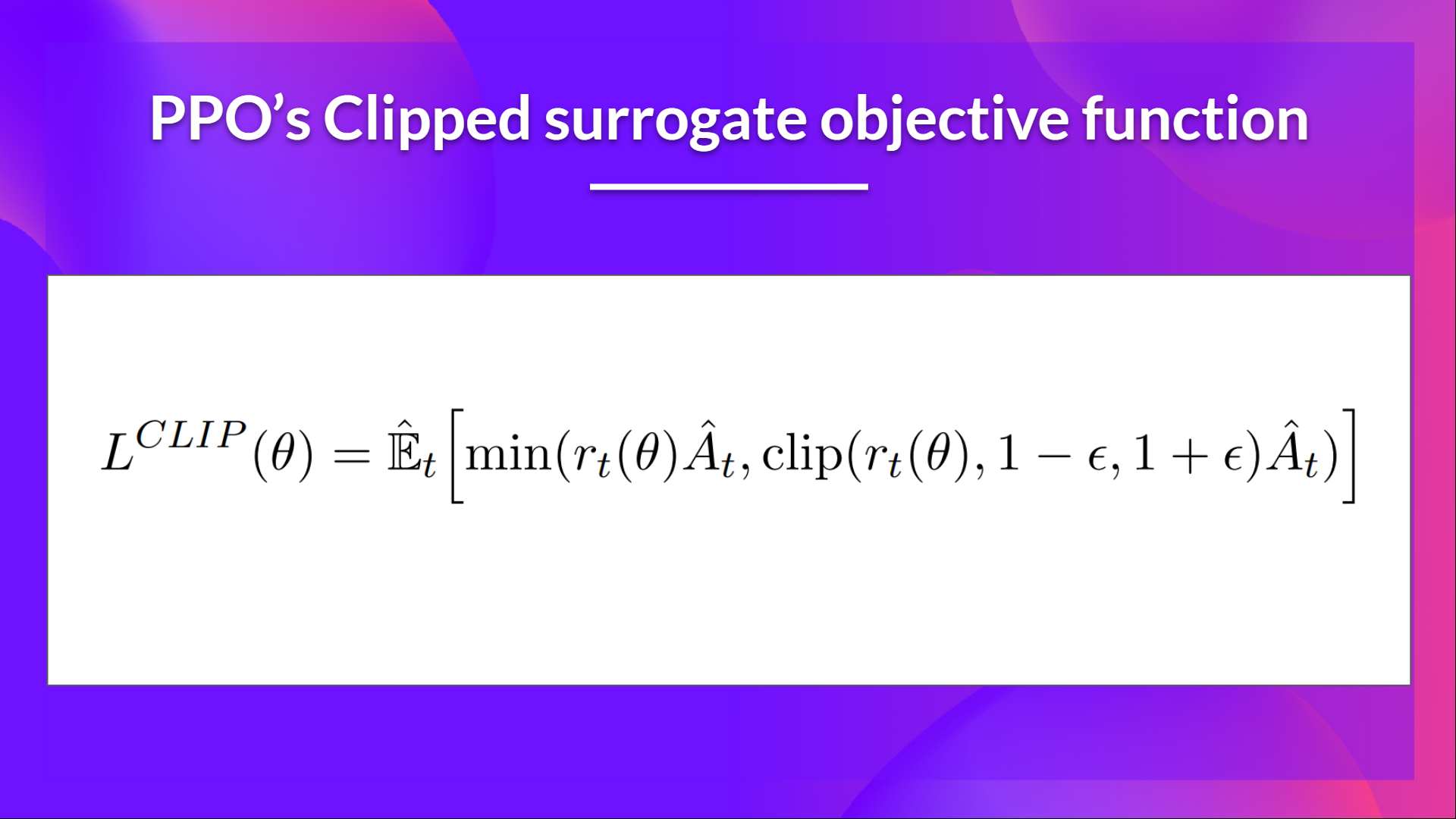
Let’s study each part to understand how it works.
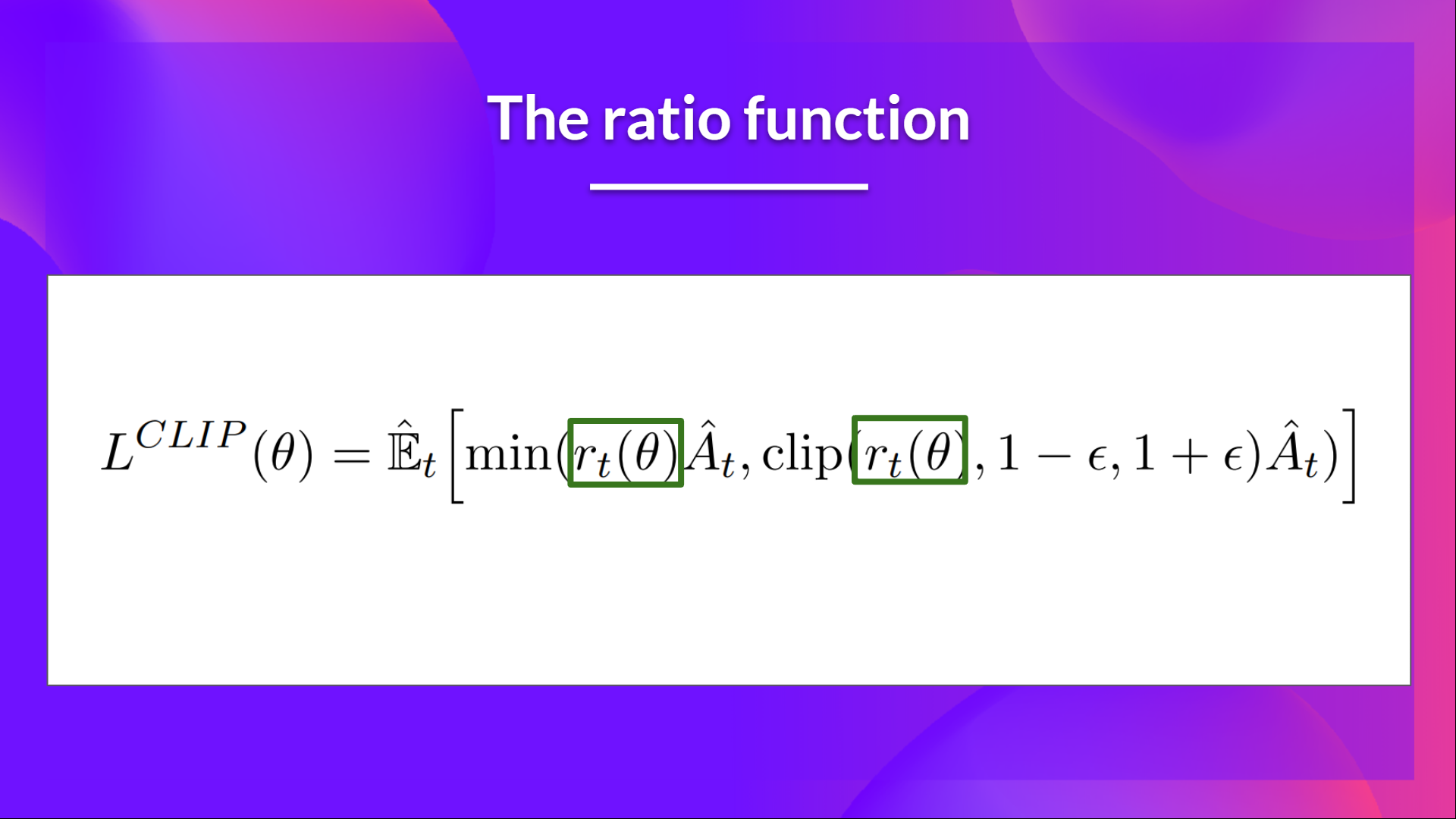
The Ratio Function
This ratio is calculated as follows:
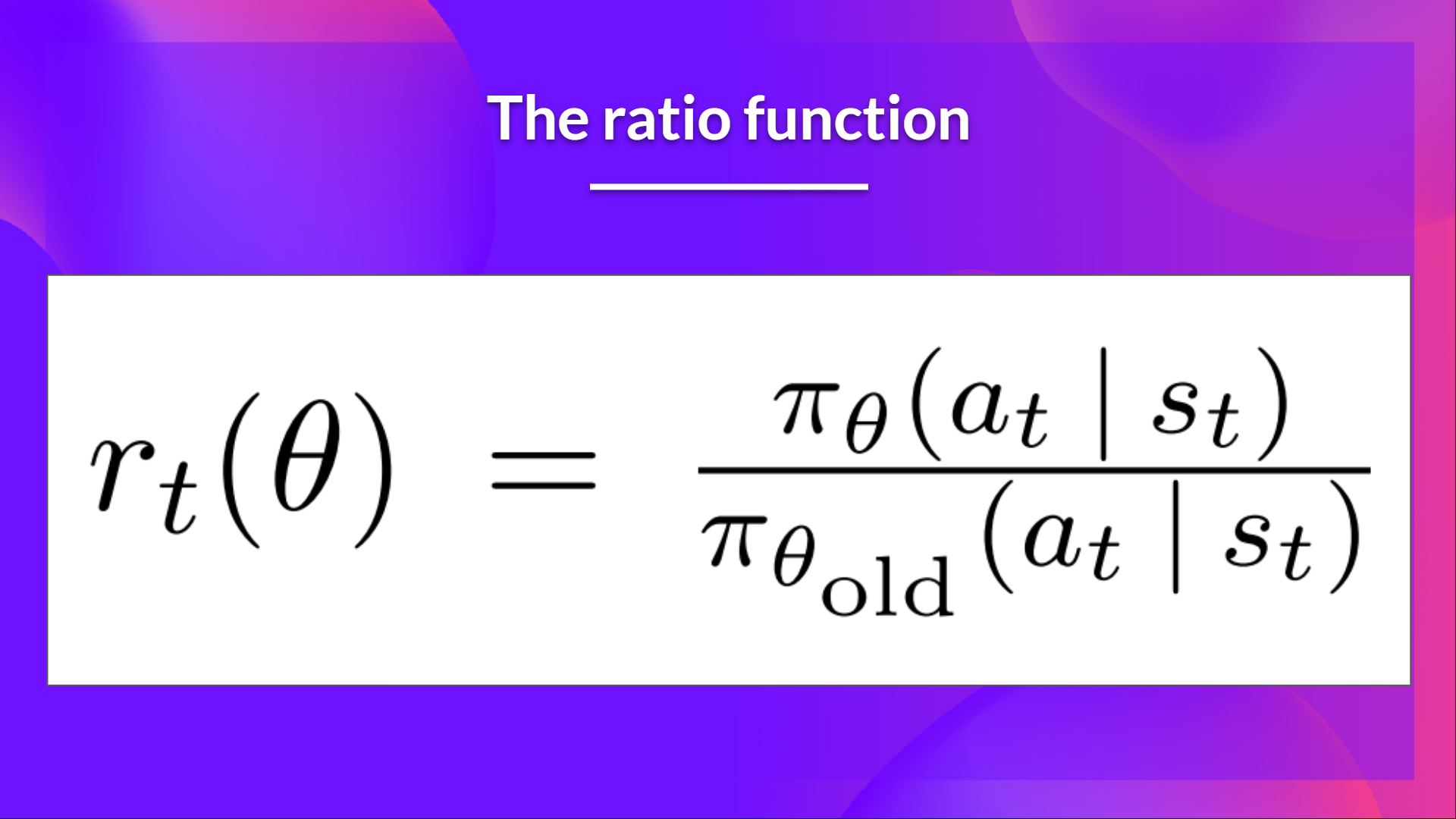
It’s the probability of taking action at state in the current policy, divided by the same for the previous policy.
As we can see, denotes the probability ratio between the current and old policy:
- If, the action at state is more likely in the current policy than the old policy.
- If is between 0 and 1, the action is less likely for the current policy than for the old one.
So this probability ratio is an easy way to estimate the divergence between old and current policy.
The unclipped part of the Clipped Surrogate Objective function
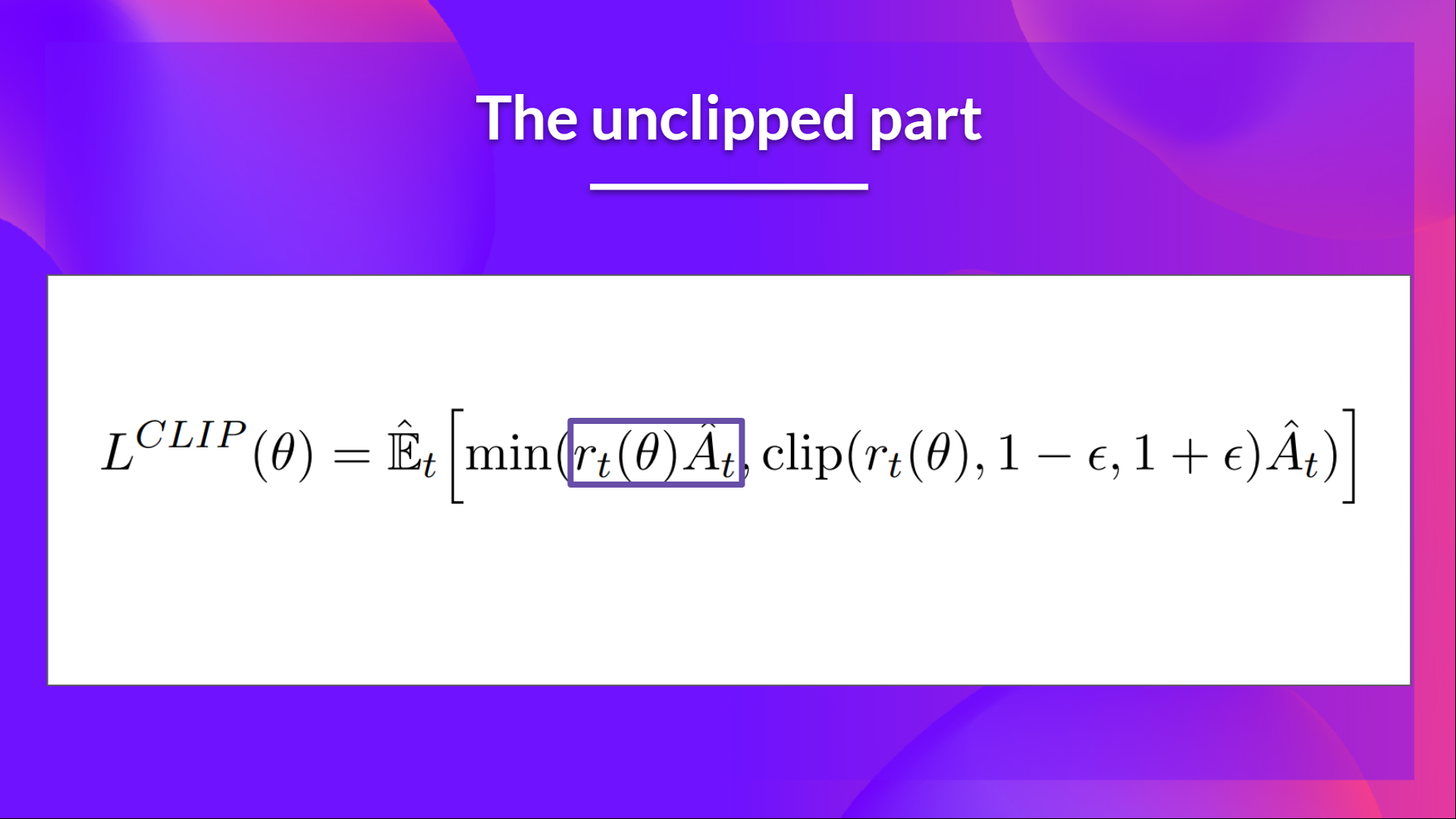
This ratio can replace the log probability we use in the policy objective function. This gives us the left part of the new objective function: multiplying the ratio by the advantage.

However, without a constraint, if the action taken is much more probable in our current policy than in our former, this would lead to a significant policy gradient step and, therefore, an excessive policy update.
The clipped Part of the Clipped Surrogate Objective function
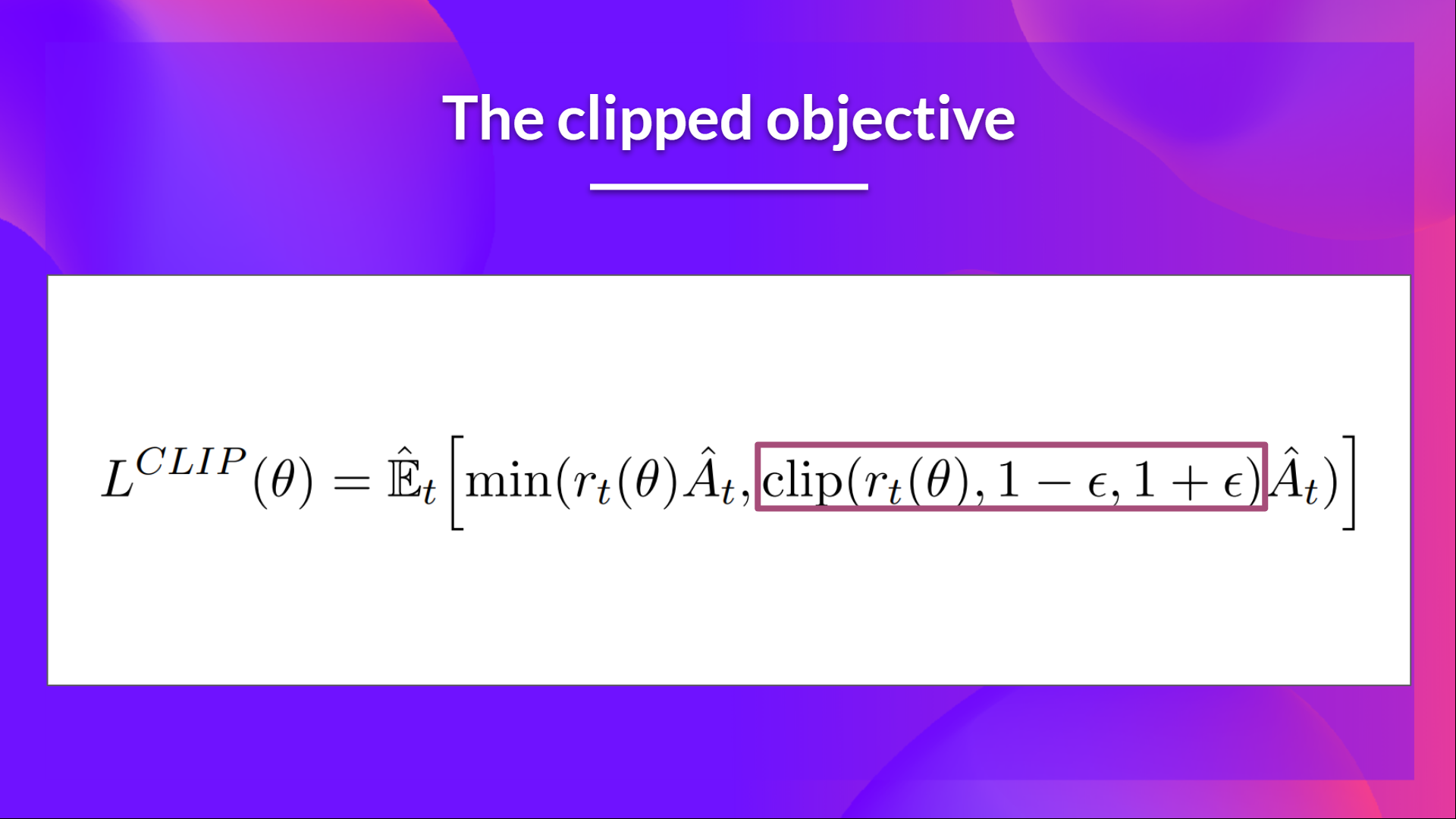
Consequently, we need to constrain this objective function by penalizing changes that lead to a ratio far away from 1 (in the paper, the ratio can only vary from 0.8 to 1.2).
By clipping the ratio, we ensure that we do not have a too large policy update because the current policy can’t be too different from the older one.
To do that, we have two solutions:
- TRPO (Trust Region Policy Optimization) uses KL divergence constraints outside the objective function to constrain the policy update. But this method is complicated to implement and takes more computation time.
- PPO clip probability ratio directly in the objective function with its Clipped surrogate objective function.
This clipped part is a version where is clipped between .
With the Clipped Surrogate Objective function, we have two probability ratios, one non-clipped and one clipped in a range between , epsilon is a hyperparameter that helps us to define this clip range (in the paper .).
Then, we take the minimum of the clipped and non-clipped objective, so the final objective is a lower bound (pessimistic bound) of the unclipped objective.
Taking the minimum of the clipped and non-clipped objective means we’ll select either the clipped or the non-clipped objective based on the ratio and advantage situation.
< > Update on GitHub