Deep RL Course documentation
Hands-on
Hands-on
Now that we studied the Q-Learning algorithm, let’s implement it from scratch and train our Q-Learning agent in two environments:
- Frozen-Lake-v1 (non-slippery and slippery version) ☃️ : where our agent will need to go from the starting state (S) to the goal state (G) by walking only on frozen tiles (F) and avoiding holes (H).
- An autonomous taxi 🚖 will need to learn to navigate a city to transport its passengers from point A to point B.
Thanks to a leaderboard, you’ll be able to compare your results with other classmates and exchange the best practices to improve your agent’s scores. Who will win the challenge for Unit 2?
To validate this hands-on for the certification process, you need to push your trained Taxi model to the Hub and get a result of >= 4.5.
To find your result, go to the leaderboard and find your model, the result = mean_reward - std of reward
For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
And you can check your progress here 👉 https://huggingface.co/spaces/ThomasSimonini/Check-my-progress-Deep-RL-Course
To start the hands-on click on the Open In Colab button 👇 :
![]()
We strongly recommend students use Google Colab for the hands-on exercises instead of running them on their personal computers.
By using Google Colab, you can focus on learning and experimenting without worrying about the technical aspects of setting up your environments.
Unit 2: Q-Learning with FrozenLake-v1 ⛄ and Taxi-v3 🚕
In this notebook, you’ll code your first Reinforcement Learning agent from scratch to play FrozenLake ❄️ using Q-Learning, share it with the community, and experiment with different configurations.
⬇️ Here is an example of what you will achieve in just a couple of minutes. ⬇️
🎮 Environments:
📚 RL-Library:
- Python and NumPy
- Gymnasium
We’re constantly trying to improve our tutorials, so if you find some issues in this notebook, please open an issue on the GitHub Repo.
Objectives of this notebook 🏆
At the end of the notebook, you will:
- Be able to use Gymnasium, the environment library.
- Be able to code a Q-Learning agent from scratch.
- Be able to push your trained agent and the code to the Hub with a nice video replay and an evaluation score 🔥.
This notebook is from the Deep Reinforcement Learning Course

In this free course, you will:
- 📖 Study Deep Reinforcement Learning in theory and practice.
- 🧑💻 Learn to use famous Deep RL libraries such as Stable Baselines3, RL Baselines3 Zoo, CleanRL and Sample Factory 2.0.
- 🤖 Train agents in unique environments
And more check 📚 the syllabus 👉 https://simoninithomas.github.io/deep-rl-course
Don’t forget to sign up to the course (we are collecting your email to be able to send you the links when each Unit is published and give you information about the challenges and updates).
The best way to keep in touch is to join our discord server to exchange with the community and with us 👉🏻 https://discord.gg/ydHrjt3WP5
Prerequisites 🏗️
Before diving into the notebook, you need to:
🔲 📚 Study Q-Learning by reading Unit 2 🤗
A small recap of Q-Learning
Q-Learning is the RL algorithm that:
Trains Q-Function, an action-value function that is encoded, in internal memory, by a Q-table that contains all the state-action pair values.
Given a state and action, our Q-Function will search the Q-table for the corresponding value.
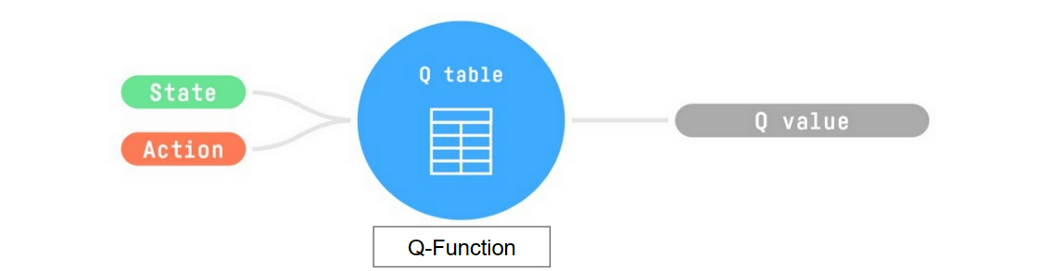
When the training is done, we have an optimal Q-Function, so an optimal Q-Table.
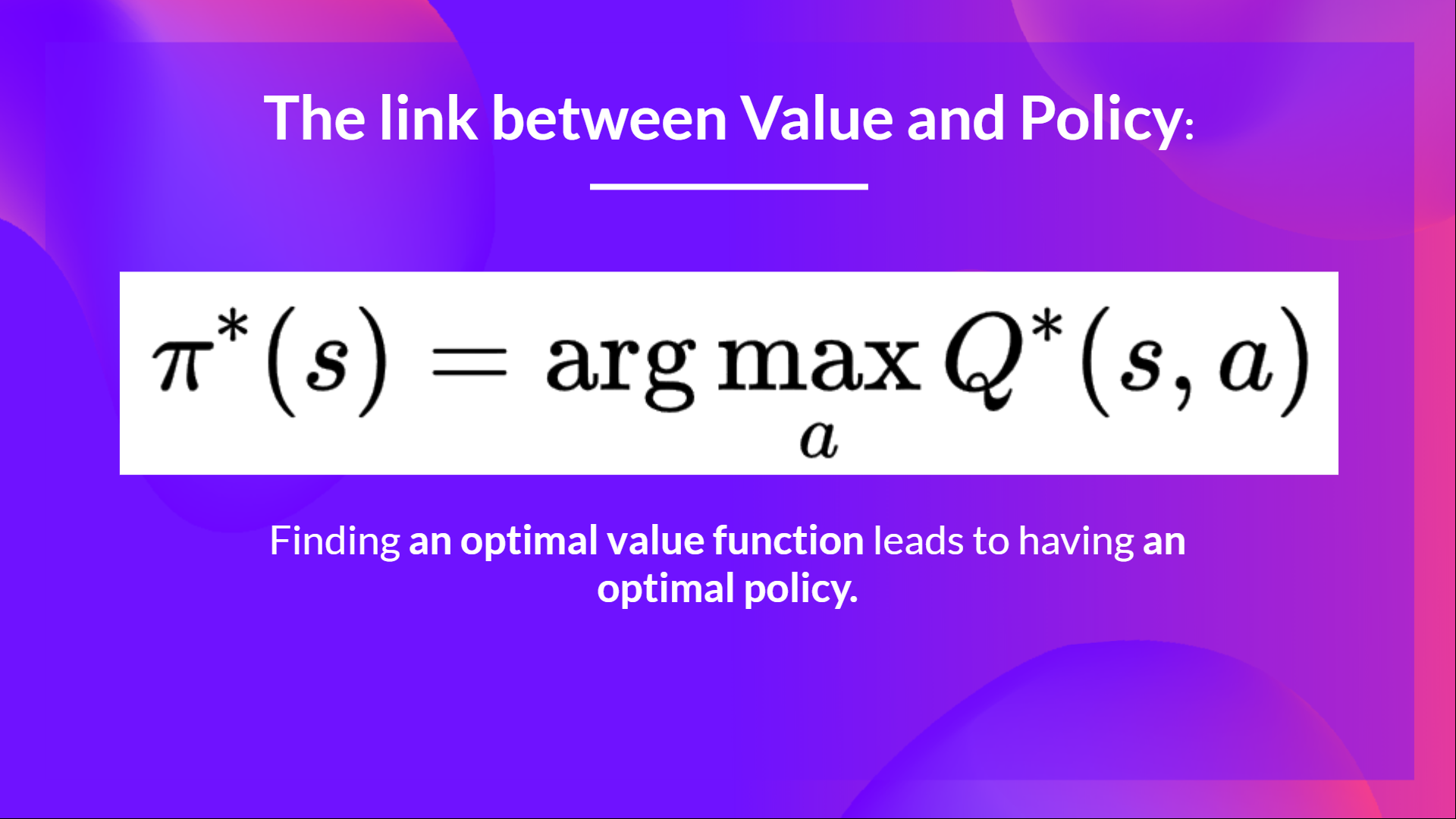
And if we have an optimal Q-function, we have an optimal policy, since we know for each state, the best action to take.
But, in the beginning, our Q-Table is useless since it gives arbitrary value for each state-action pair (most of the time we initialize the Q-Table to 0 values). But, as we’ll explore the environment and update our Q-Table it will give us better and better approximations
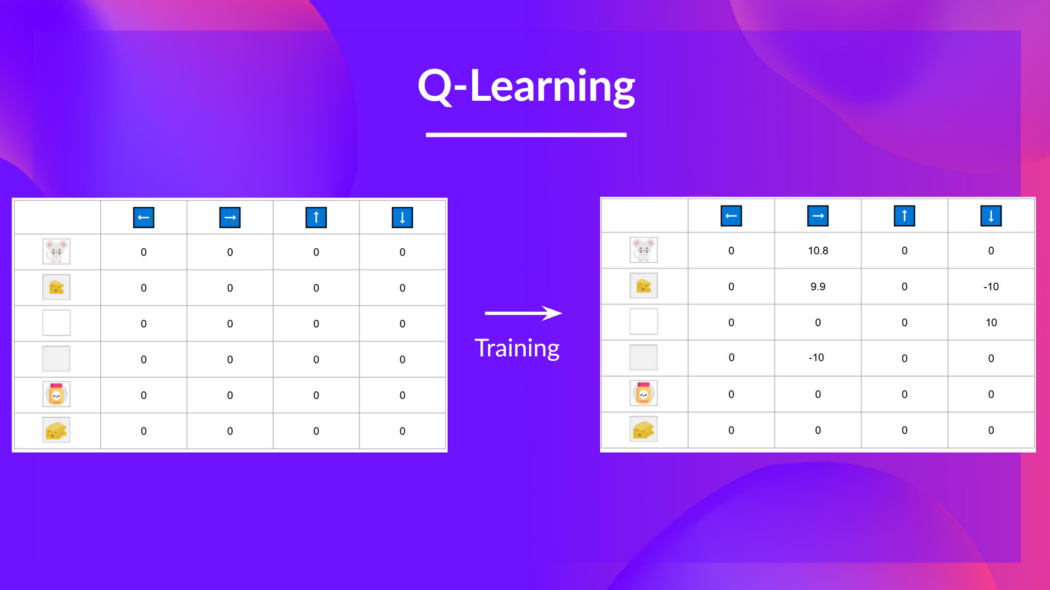
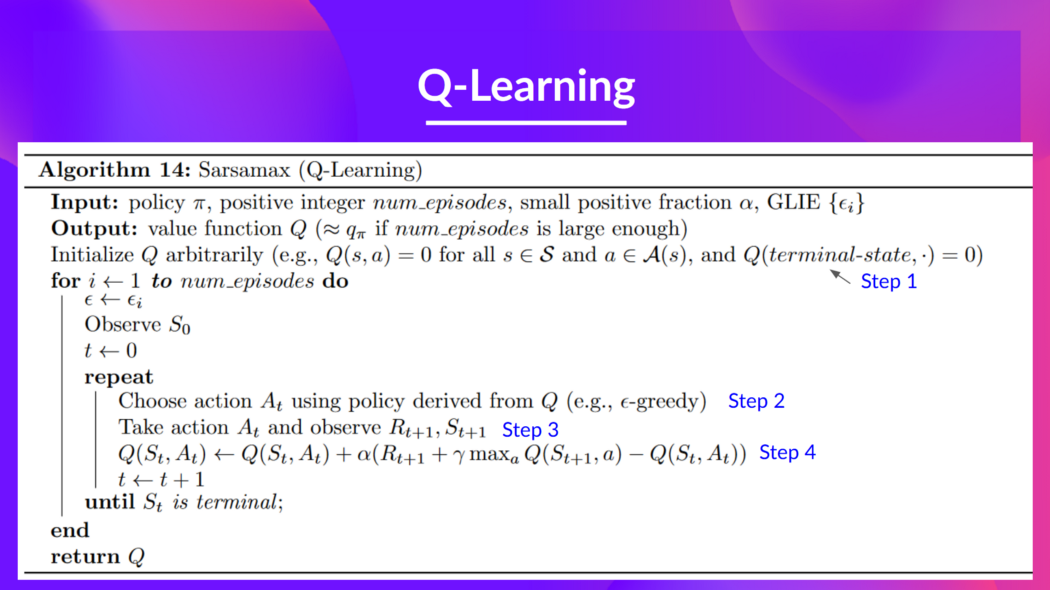
This is the Q-Learning pseudocode:
Let’s code our first Reinforcement Learning algorithm 🚀
To validate this hands-on for the certification process, you need to push your trained Taxi model to the Hub and get a result of >= 4.5.
To find your result, go to the leaderboard and find your model, the result = mean_reward - std of reward
For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
Install dependencies and create a virtual display 🔽
In the notebook, we’ll need to generate a replay video. To do so, with Colab, we need to have a virtual screen to render the environment (and thus record the frames).
Hence the following cell will install the libraries and create and run a virtual screen 🖥
We’ll install multiple ones:
gymnasium: Contains the FrozenLake-v1 ⛄ and Taxi-v3 🚕 environments.pygame: Used for the FrozenLake-v1 and Taxi-v3 UI.numpy: Used for handling our Q-table.
The Hugging Face Hub 🤗 works as a central place where anyone can share and explore models and datasets. It has versioning, metrics, visualizations and other features that will allow you to easily collaborate with others.
You can see here all the Deep RL models available (if they use Q Learning) here 👉 https://huggingface.co/models?other=q-learning
pip install -r https://raw.githubusercontent.com/huggingface/deep-rl-class/main/notebooks/unit2/requirements-unit2.txt
sudo apt-get update sudo apt-get install -y python3-opengl apt install ffmpeg xvfb pip3 install pyvirtualdisplay
To make sure the new installed libraries are used, sometimes it’s required to restart the notebook runtime. The next cell will force the runtime to crash, so you’ll need to connect again and run the code starting from here. Thanks to this trick, we will be able to run our virtual screen.
import os
os.kill(os.getpid(), 9)# Virtual display
from pyvirtualdisplay import Display
virtual_display = Display(visible=0, size=(1400, 900))
virtual_display.start()Import the packages 📦
In addition to the installed libraries, we also use:
random: To generate random numbers (that will be useful for epsilon-greedy policy).imageio: To generate a replay video.
import numpy as np
import gymnasium as gym
import random
import imageio
import os
import tqdm
import pickle5 as pickle
from tqdm.notebook import tqdmWe’re now ready to code our Q-Learning algorithm 🔥
Part 1: Frozen Lake ⛄ (non slippery version)
Create and understand FrozenLake environment ⛄ (( https://gymnasium.farama.org/environments/toy_text/frozen_lake/ )
💡 A good habit when you start to use an environment is to check its documentation
👉 https://gymnasium.farama.org/environments/toy_text/frozen_lake/
We’re going to train our Q-Learning agent to navigate from the starting state (S) to the goal state (G) by walking only on frozen tiles (F) and avoid holes (H).
We can have two sizes of environment:
map_name="4x4": a 4x4 grid versionmap_name="8x8": a 8x8 grid version
The environment has two modes:
is_slippery=False: The agent always moves in the intended direction due to the non-slippery nature of the frozen lake (deterministic).is_slippery=True: The agent may not always move in the intended direction due to the slippery nature of the frozen lake (stochastic).
For now let’s keep it simple with the 4x4 map and non-slippery.
We add a parameter called render_mode that specifies how the environment should be visualised. In our case because we want to record a video of the environment at the end, we need to set render_mode to rgb_array.
As explained in the documentation “rgb_array”: Return a single frame representing the current state of the environment. A frame is a np.ndarray with shape (x, y, 3) representing RGB values for an x-by-y pixel image.
# Create the FrozenLake-v1 environment using 4x4 map and non-slippery version and render_mode="rgb_array"
env = gym.make() # TODO use the correct parametersSolution
env = gym.make("FrozenLake-v1", map_name="4x4", is_slippery=False, render_mode="rgb_array")You can create your own custom grid like this:
desc=["SFFF", "FHFH", "FFFH", "HFFG"]
gym.make('FrozenLake-v1', desc=desc, is_slippery=True)but we’ll use the default environment for now.
Let’s see what the Environment looks like:
# We create our environment with gym.make("<name_of_the_environment>")- `is_slippery=False`: The agent always moves in the intended direction due to the non-slippery nature of the frozen lake (deterministic).
print("_____OBSERVATION SPACE_____ \n")
print("Observation Space", env.observation_space)
print("Sample observation", env.observation_space.sample()) # Get a random observationWe see with Observation Space Shape Discrete(16) that the observation is an integer representing the agent’s current position as current_row * ncols + current_col (where both the row and col start at 0).
For example, the goal position in the 4x4 map can be calculated as follows: 3 * 4 + 3 = 15. The number of possible observations is dependent on the size of the map. For example, the 4x4 map has 16 possible observations.
For instance, this is what state = 0 looks like:

print("\n _____ACTION SPACE_____ \n")
print("Action Space Shape", env.action_space.n)
print("Action Space Sample", env.action_space.sample()) # Take a random actionThe action space (the set of possible actions the agent can take) is discrete with 4 actions available 🎮:
- 0: GO LEFT
- 1: GO DOWN
- 2: GO RIGHT
- 3: GO UP
Reward function 💰:
- Reach goal: +1
- Reach hole: 0
- Reach frozen: 0
Create and Initialize the Q-table 🗄️
(👀 Step 1 of the pseudocode)
It’s time to initialize our Q-table! To know how many rows (states) and columns (actions) to use, we need to know the action and observation space. We already know their values from before, but we’ll want to obtain them programmatically so that our algorithm generalizes for different environments. Gym provides us a way to do that: env.action_space.n and env.observation_space.n
state_space =
print("There are ", state_space, " possible states")
action_space =
print("There are ", action_space, " possible actions")# Let's create our Qtable of size (state_space, action_space) and initialized each values at 0 using np.zeros. np.zeros needs a tuple (a,b)
def initialize_q_table(state_space, action_space):
Qtable =
return QtableQtable_frozenlake = initialize_q_table(state_space, action_space)
Solution
state_space = env.observation_space.n
print("There are ", state_space, " possible states")
action_space = env.action_space.n
print("There are ", action_space, " possible actions")# Let's create our Qtable of size (state_space, action_space) and initialized each values at 0 using np.zeros
def initialize_q_table(state_space, action_space):
Qtable = np.zeros((state_space, action_space))
return QtableQtable_frozenlake = initialize_q_table(state_space, action_space)
Define the greedy policy 🤖
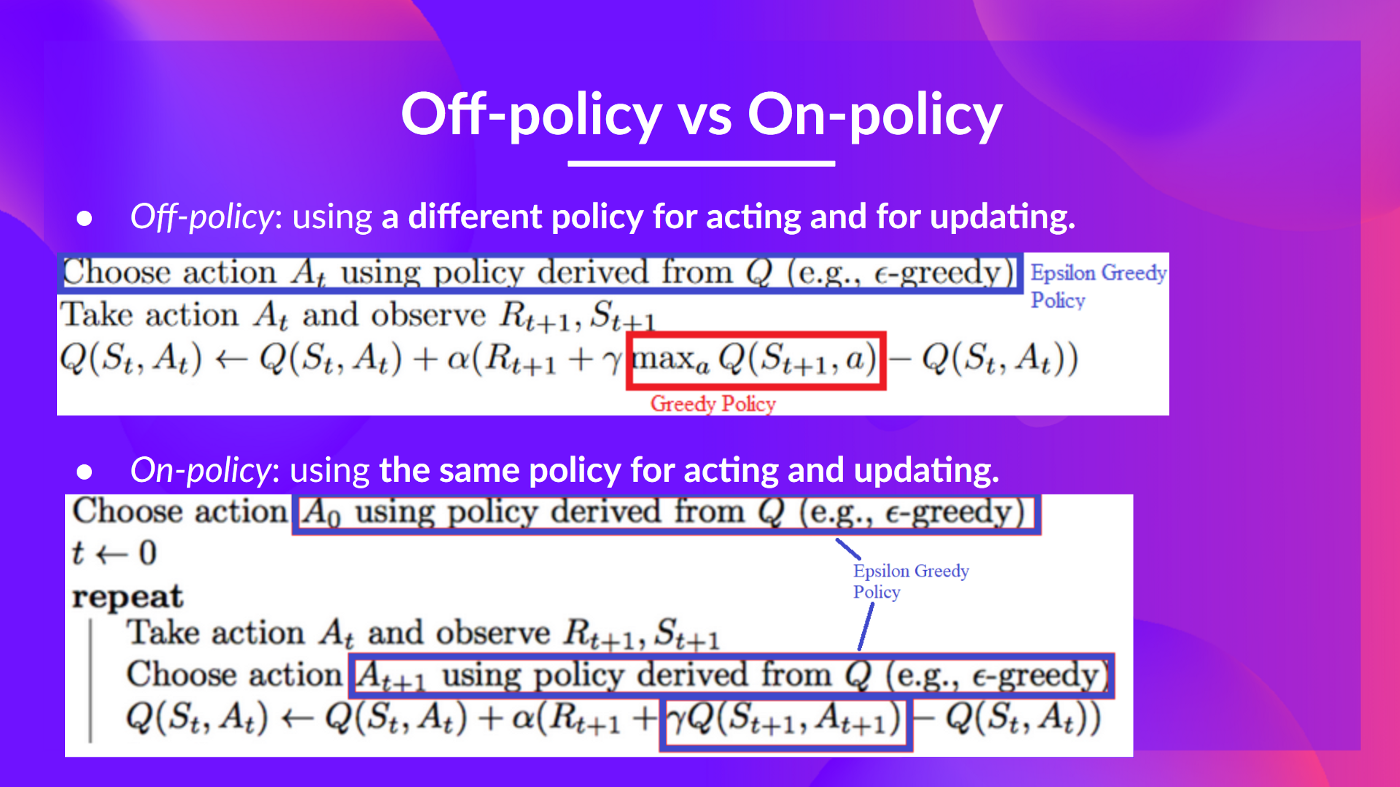
Remember we have two policies since Q-Learning is an off-policy algorithm. This means we’re using a different policy for acting and updating the value function.
- Epsilon-greedy policy (acting policy)
- Greedy-policy (updating policy)
The greedy policy will also be the final policy we’ll have when the Q-learning agent completes training. The greedy policy is used to select an action using the Q-table.
def greedy_policy(Qtable, state):
# Exploitation: take the action with the highest state, action value
action =
return actionSolution
def greedy_policy(Qtable, state):
# Exploitation: take the action with the highest state, action value
action = np.argmax(Qtable[state][:])
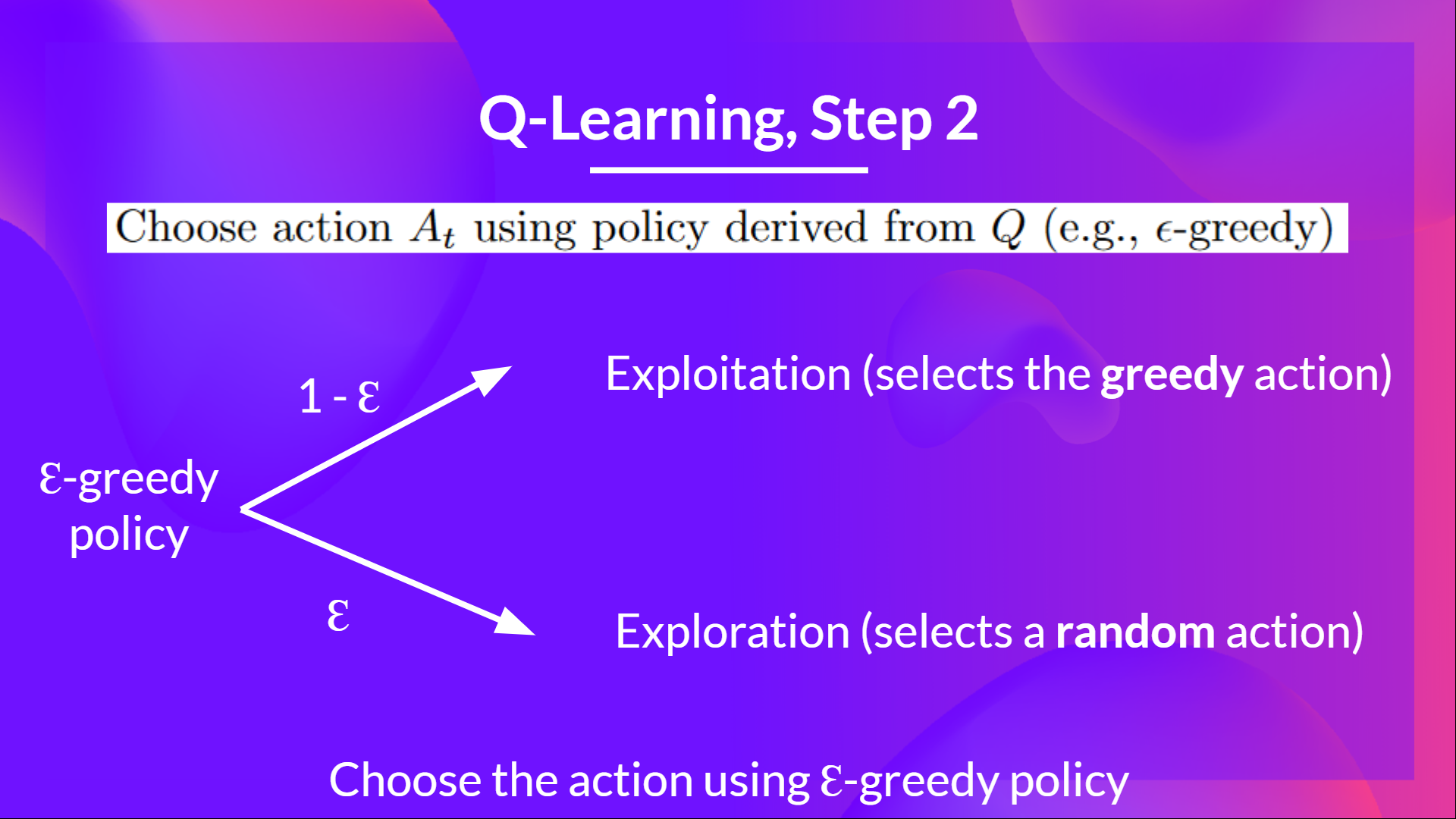
return actionDefine the epsilon-greedy policy 🤖
Epsilon-greedy is the training policy that handles the exploration/exploitation trade-off.
The idea with epsilon-greedy:
With probability 1 - ɛ : we do exploitation (i.e. our agent selects the action with the highest state-action pair value).
With probability ɛ: we do exploration (trying a random action).
As the training continues, we progressively reduce the epsilon value since we will need less and less exploration and more exploitation.
def epsilon_greedy_policy(Qtable, state, epsilon):
# Randomly generate a number between 0 and 1
random_num =
# if random_num > greater than epsilon --> exploitation
if random_num > epsilon:
# Take the action with the highest value given a state
# np.argmax can be useful here
action =
# else --> exploration
else:
action = # Take a random action
return actionSolution
def epsilon_greedy_policy(Qtable, state, epsilon):
# Randomly generate a number between 0 and 1
random_num = random.uniform(0, 1)
# if random_num > greater than epsilon --> exploitation
if random_num > epsilon:
# Take the action with the highest value given a state
# np.argmax can be useful here
action = greedy_policy(Qtable, state)
# else --> exploration
else:
action = env.action_space.sample()
return actionDefine the hyperparameters ⚙️
The exploration related hyperparamters are some of the most important ones.
- We need to make sure that our agent explores enough of the state space to learn a good value approximation. To do that, we need to have progressive decay of the epsilon.
- If you decrease epsilon too fast (too high decay_rate), you take the risk that your agent will be stuck, since your agent didn’t explore enough of the state space and hence can’t solve the problem.
# Training parameters
n_training_episodes = 10000 # Total training episodes
learning_rate = 0.7 # Learning rate
# Evaluation parameters
n_eval_episodes = 100 # Total number of test episodes
# Environment parameters
env_id = "FrozenLake-v1" # Name of the environment
max_steps = 99 # Max steps per episode
gamma = 0.95 # Discounting rate
eval_seed = [] # The evaluation seed of the environment
# Exploration parameters
max_epsilon = 1.0 # Exploration probability at start
min_epsilon = 0.05 # Minimum exploration probability
decay_rate = 0.0005 # Exponential decay rate for exploration probCreate the training loop method
The training loop goes like this:
For episode in the total of training episodes:
Reduce epsilon (since we need less and less exploration)
Reset the environment
For step in max timesteps:
Choose the action At using epsilon greedy policy
Take the action (a) and observe the outcome state(s') and reward (r)
Update the Q-value Q(s,a) using Bellman equation Q(s,a) + lr [R(s,a) + gamma * max Q(s',a') - Q(s,a)]
If done, finish the episode
Our next state is the new statedef train(n_training_episodes, min_epsilon, max_epsilon, decay_rate, env, max_steps, Qtable):
for episode in tqdm(range(n_training_episodes)):
# Reduce epsilon (because we need less and less exploration)
epsilon = min_epsilon + (max_epsilon - min_epsilon)*np.exp(-decay_rate*episode)
# Reset the environment
state, info = env.reset()
step = 0
terminated = False
truncated = False
# repeat
for step in range(max_steps):
# Choose the action At using epsilon greedy policy
action =
# Take action At and observe Rt+1 and St+1
# Take the action (a) and observe the outcome state(s') and reward (r)
new_state, reward, terminated, truncated, info =
# Update Q(s,a):= Q(s,a) + lr [R(s,a) + gamma * max Q(s',a') - Q(s,a)]
Qtable[state][action] =
# If terminated or truncated finish the episode
if terminated or truncated:
break
# Our next state is the new state
state = new_state
return QtableSolution
def train(n_training_episodes, min_epsilon, max_epsilon, decay_rate, env, max_steps, Qtable):
for episode in tqdm(range(n_training_episodes)):
# Reduce epsilon (because we need less and less exploration)
epsilon = min_epsilon + (max_epsilon - min_epsilon) * np.exp(-decay_rate * episode)
# Reset the environment
state, info = env.reset()
step = 0
terminated = False
truncated = False
# repeat
for step in range(max_steps):
# Choose the action At using epsilon greedy policy
action = epsilon_greedy_policy(Qtable, state, epsilon)
# Take action At and observe Rt+1 and St+1
# Take the action (a) and observe the outcome state(s') and reward (r)
new_state, reward, terminated, truncated, info = env.step(action)
# Update Q(s,a):= Q(s,a) + lr [R(s,a) + gamma * max Q(s',a') - Q(s,a)]
Qtable[state][action] = Qtable[state][action] + learning_rate * (
reward + gamma * np.max(Qtable[new_state]) - Qtable[state][action]
)
# If terminated or truncated finish the episode
if terminated or truncated:
break
# Our next state is the new state
state = new_state
return QtableTrain the Q-Learning agent 🏃
Qtable_frozenlake = train(n_training_episodes, min_epsilon, max_epsilon, decay_rate, env, max_steps, Qtable_frozenlake)
Let’s see what our Q-Learning table looks like now 👀
Qtable_frozenlake
The evaluation method 📝
- We defined the evaluation method that we’re going to use to test our Q-Learning agent.
def evaluate_agent(env, max_steps, n_eval_episodes, Q, seed):
"""
Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
:param env: The evaluation environment
:param n_eval_episodes: Number of episode to evaluate the agent
:param Q: The Q-table
:param seed: The evaluation seed array (for taxi-v3)
"""
episode_rewards = []
for episode in tqdm(range(n_eval_episodes)):
if seed:
state, info = env.reset(seed=seed[episode])
else:
state, info = env.reset()
step = 0
truncated = False
terminated = False
total_rewards_ep = 0
for step in range(max_steps):
# Take the action (index) that have the maximum expected future reward given that state
action = greedy_policy(Q, state)
new_state, reward, terminated, truncated, info = env.step(action)
total_rewards_ep += reward
if terminated or truncated:
break
state = new_state
episode_rewards.append(total_rewards_ep)
mean_reward = np.mean(episode_rewards)
std_reward = np.std(episode_rewards)
return mean_reward, std_rewardEvaluate our Q-Learning agent 📈
- Usually, you should have a mean reward of 1.0
- The environment is relatively easy since the state space is really small (16). What you can try to do is to replace it with the slippery version, which introduces stochasticity, making the environment more complex.
# Evaluate our Agent
mean_reward, std_reward = evaluate_agent(env, max_steps, n_eval_episodes, Qtable_frozenlake, eval_seed)
print(f"Mean_reward={mean_reward:.2f} +/- {std_reward:.2f}")Publish our trained model to the Hub 🔥
Now that we saw good results after the training, we can publish our trained model to the Hub 🤗 with one line of code.
Here’s an example of a Model Card:
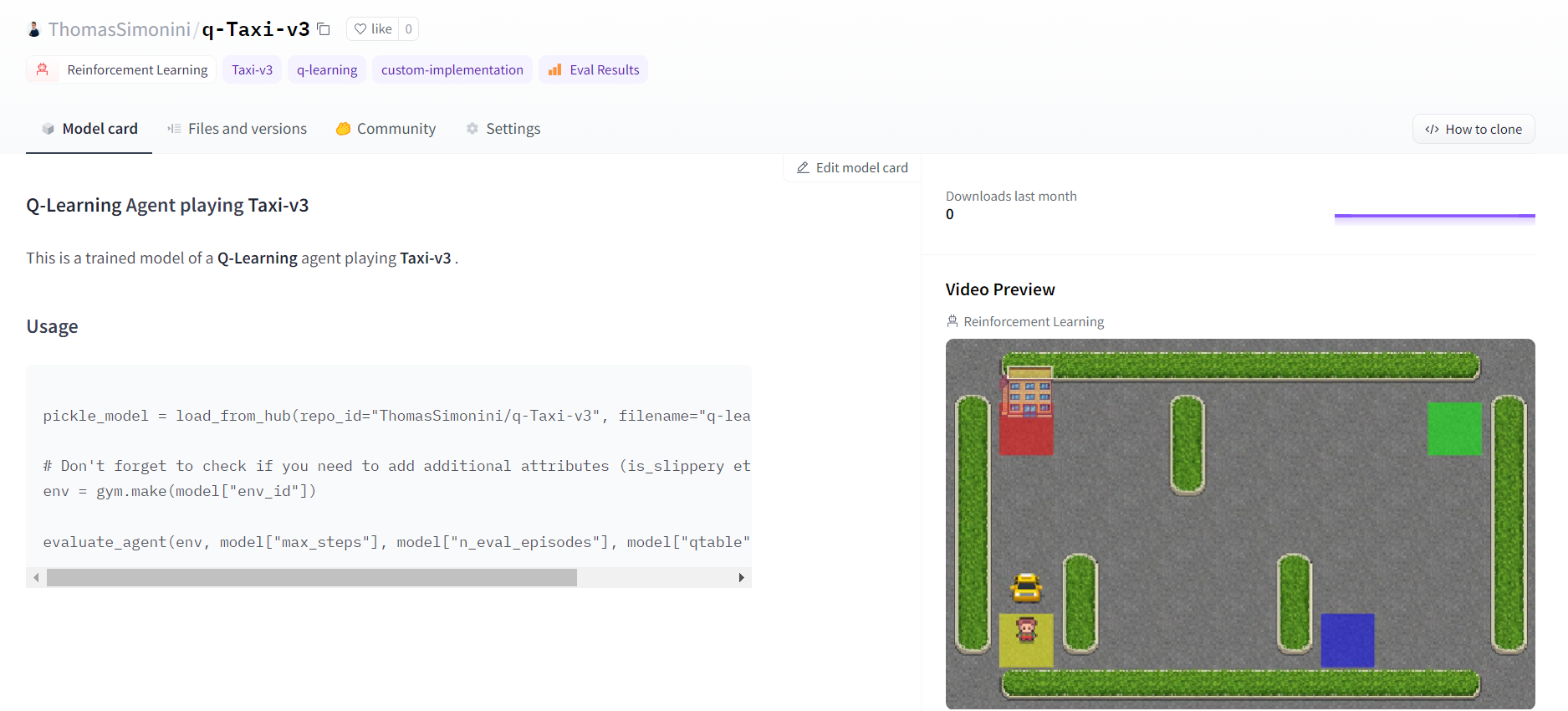
Under the hood, the Hub uses git-based repositories (don’t worry if you don’t know what git is), which means you can update the model with new versions as you experiment and improve your agent.
Do not modify this code
from huggingface_hub import HfApi, snapshot_download
from huggingface_hub.repocard import metadata_eval_result, metadata_save
from pathlib import Path
import datetime
import jsondef record_video(env, Qtable, out_directory, fps=1):
"""
Generate a replay video of the agent
:param env
:param Qtable: Qtable of our agent
:param out_directory
:param fps: how many frame per seconds (with taxi-v3 and frozenlake-v1 we use 1)
"""
images = []
terminated = False
truncated = False
state, info = env.reset(seed=random.randint(0, 500))
img = env.render()
images.append(img)
while not terminated or truncated:
# Take the action (index) that have the maximum expected future reward given that state
action = np.argmax(Qtable[state][:])
state, reward, terminated, truncated, info = env.step(
action
) # We directly put next_state = state for recording logic
img = env.render()
images.append(img)
imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)def push_to_hub(repo_id, model, env, video_fps=1, local_repo_path="hub"):
"""
Evaluate, Generate a video and Upload a model to Hugging Face Hub.
This method does the complete pipeline:
- It evaluates the model
- It generates the model card
- It generates a replay video of the agent
- It pushes everything to the Hub
:param repo_id: repo_id: id of the model repository from the Hugging Face Hub
:param env
:param video_fps: how many frame per seconds to record our video replay
(with taxi-v3 and frozenlake-v1 we use 1)
:param local_repo_path: where the local repository is
"""
_, repo_name = repo_id.split("/")
eval_env = env
api = HfApi()
# Step 1: Create the repo
repo_url = api.create_repo(
repo_id=repo_id,
exist_ok=True,
)
# Step 2: Download files
repo_local_path = Path(snapshot_download(repo_id=repo_id))
# Step 3: Save the model
if env.spec.kwargs.get("map_name"):
model["map_name"] = env.spec.kwargs.get("map_name")
if env.spec.kwargs.get("is_slippery", "") == False:
model["slippery"] = False
# Pickle the model
with open((repo_local_path) / "q-learning.pkl", "wb") as f:
pickle.dump(model, f)
# Step 4: Evaluate the model and build JSON with evaluation metrics
mean_reward, std_reward = evaluate_agent(
eval_env, model["max_steps"], model["n_eval_episodes"], model["qtable"], model["eval_seed"]
)
evaluate_data = {
"env_id": model["env_id"],
"mean_reward": mean_reward,
"n_eval_episodes": model["n_eval_episodes"],
"eval_datetime": datetime.datetime.now().isoformat(),
}
# Write a JSON file called "results.json" that will contain the
# evaluation results
with open(repo_local_path / "results.json", "w") as outfile:
json.dump(evaluate_data, outfile)
# Step 5: Create the model card
env_name = model["env_id"]
if env.spec.kwargs.get("map_name"):
env_name += "-" + env.spec.kwargs.get("map_name")
if env.spec.kwargs.get("is_slippery", "") == False:
env_name += "-" + "no_slippery"
metadata = {}
metadata["tags"] = [env_name, "q-learning", "reinforcement-learning", "custom-implementation"]
# Add metrics
eval = metadata_eval_result(
model_pretty_name=repo_name,
task_pretty_name="reinforcement-learning",
task_id="reinforcement-learning",
metrics_pretty_name="mean_reward",
metrics_id="mean_reward",
metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
dataset_pretty_name=env_name,
dataset_id=env_name,
)
# Merges both dictionaries
metadata = {**metadata, **eval}
model_card = f"""
# **Q-Learning** Agent playing1 **{env_id}**
This is a trained model of a **Q-Learning** agent playing **{env_id}** .
## Usage
model = load_from_hub(repo_id="{repo_id}", filename="q-learning.pkl")
# Don't forget to check if you need to add additional attributes (is_slippery=False etc)
env = gym.make(model["env_id"])
"""
evaluate_agent(env, model["max_steps"], model["n_eval_episodes"], model["qtable"], model["eval_seed"])
readme_path = repo_local_path / "README.md"
readme = ""
print(readme_path.exists())
if readme_path.exists():
with readme_path.open("r", encoding="utf8") as f:
readme = f.read()
else:
readme = model_card
with readme_path.open("w", encoding="utf-8") as f:
f.write(readme)
# Save our metrics to Readme metadata
metadata_save(readme_path, metadata)
# Step 6: Record a video
video_path = repo_local_path / "replay.mp4"
record_video(env, model["qtable"], video_path, video_fps)
# Step 7. Push everything to the Hub
api.upload_folder(
repo_id=repo_id,
folder_path=repo_local_path,
path_in_repo=".",
)
print("Your model is pushed to the Hub. You can view your model here: ", repo_url).
By using push_to_hub you evaluate, record a replay, generate a model card of your agent and push it to the Hub.
This way:
- You can showcase our work 🔥
- You can visualize your agent playing 👀
- You can share an agent with the community that others can use 💾
- You can access a leaderboard 🏆 to see how well your agent is performing compared to your classmates 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
To be able to share your model with the community there are three more steps to follow:
1️⃣ (If it’s not already done) create an account to HF ➡ https://huggingface.co/join
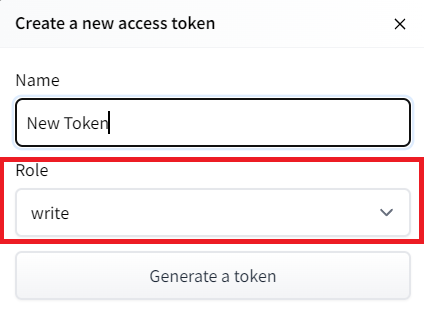
2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) with write role
from huggingface_hub import notebook_login
notebook_login()If you don’t want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: huggingface-cli login (or login)
3️⃣ We’re now ready to push our trained agent to the 🤗 Hub 🔥 using push_to_hub() function
- Let’s create the model dictionary that contains the hyperparameters and the Q_table.
model = {
"env_id": env_id,
"max_steps": max_steps,
"n_training_episodes": n_training_episodes,
"n_eval_episodes": n_eval_episodes,
"eval_seed": eval_seed,
"learning_rate": learning_rate,
"gamma": gamma,
"max_epsilon": max_epsilon,
"min_epsilon": min_epsilon,
"decay_rate": decay_rate,
"qtable": Qtable_frozenlake,
}Let’s fill the push_to_hub function:
repo_id: the name of the Hugging Face Hub Repository that will be created/updated(repo_id = {username}/{repo_name})💡 A goodrepo_idis{username}/q-{env_id}model: our model dictionary containing the hyperparameters and the Qtable.env: the environment.commit_message: message of the commit
model
username = "" # FILL THIS
repo_name = "q-FrozenLake-v1-4x4-noSlippery"
push_to_hub(repo_id=f"{username}/{repo_name}", model=model, env=env)Congrats 🥳 you’ve just implemented from scratch, trained, and uploaded your first Reinforcement Learning agent. FrozenLake-v1 no_slippery is very simple environment, let’s try a harder one 🔥.
Part 2: Taxi-v3 🚖
Create and understand Taxi-v3 🚕
💡 A good habit when you start to use an environment is to check its documentation
👉 https://gymnasium.farama.org/environments/toy_text/taxi/
In Taxi-v3 🚕, there are four designated locations in the grid world indicated by R(ed), G(reen), Y(ellow), and B(lue).
When the episode starts, the taxi starts off at a random square and the passenger is at a random location. The taxi drives to the passenger’s location, picks up the passenger, drives to the passenger’s destination (another one of the four specified locations), and then drops off the passenger. Once the passenger is dropped off, the episode ends.
env = gym.make("Taxi-v3", render_mode="rgb_array")There are 500 discrete states since there are 25 taxi positions, 5 possible locations of the passenger (including the case when the passenger is in the taxi), and 4 destination locations.
state_space = env.observation_space.n
print("There are ", state_space, " possible states")action_space = env.action_space.n
print("There are ", action_space, " possible actions")The action space (the set of possible actions the agent can take) is discrete with 6 actions available 🎮:
- 0: move south
- 1: move north
- 2: move east
- 3: move west
- 4: pickup passenger
- 5: drop off passenger
Reward function 💰:
- -1 per step unless other reward is triggered.
- +20 delivering passenger.
- -10 executing “pickup” and “drop-off” actions illegally.
# Create our Q table with state_size rows and action_size columns (500x6)
Qtable_taxi = initialize_q_table(state_space, action_space)
print(Qtable_taxi)
print("Q-table shape: ", Qtable_taxi.shape)Define the hyperparameters ⚙️
⚠ DO NOT MODIFY EVAL_SEED: the eval_seed array allows us to evaluate your agent with the same taxi starting positions for every classmate
# Training parameters
n_training_episodes = 25000 # Total training episodes
learning_rate = 0.7 # Learning rate
# Evaluation parameters
n_eval_episodes = 100 # Total number of test episodes
# DO NOT MODIFY EVAL_SEED
eval_seed = [
16,
54,
165,
177,
191,
191,
120,
80,
149,
178,
48,
38,
6,
125,
174,
73,
50,
172,
100,
148,
146,
6,
25,
40,
68,
148,
49,
167,
9,
97,
164,
176,
61,
7,
54,
55,
161,
131,
184,
51,
170,
12,
120,
113,
95,
126,
51,
98,
36,
135,
54,
82,
45,
95,
89,
59,
95,
124,
9,
113,
58,
85,
51,
134,
121,
169,
105,
21,
30,
11,
50,
65,
12,
43,
82,
145,
152,
97,
106,
55,
31,
85,
38,
112,
102,
168,
123,
97,
21,
83,
158,
26,
80,
63,
5,
81,
32,
11,
28,
148,
] # Evaluation seed, this ensures that all classmates agents are trained on the same taxi starting position
# Each seed has a specific starting state
# Environment parameters
env_id = "Taxi-v3" # Name of the environment
max_steps = 99 # Max steps per episode
gamma = 0.95 # Discounting rate
# Exploration parameters
max_epsilon = 1.0 # Exploration probability at start
min_epsilon = 0.05 # Minimum exploration probability
decay_rate = 0.005 # Exponential decay rate for exploration probTrain our Q-Learning agent 🏃
Qtable_taxi = train(n_training_episodes, min_epsilon, max_epsilon, decay_rate, env, max_steps, Qtable_taxi) Qtable_taxi
Create a model dictionary 💾 and publish our trained model to the Hub 🔥
- We create a model dictionary that will contain all the training hyperparameters for reproducibility and the Q-Table.
model = {
"env_id": env_id,
"max_steps": max_steps,
"n_training_episodes": n_training_episodes,
"n_eval_episodes": n_eval_episodes,
"eval_seed": eval_seed,
"learning_rate": learning_rate,
"gamma": gamma,
"max_epsilon": max_epsilon,
"min_epsilon": min_epsilon,
"decay_rate": decay_rate,
"qtable": Qtable_taxi,
}username = "" # FILL THIS
repo_name = "" # FILL THIS
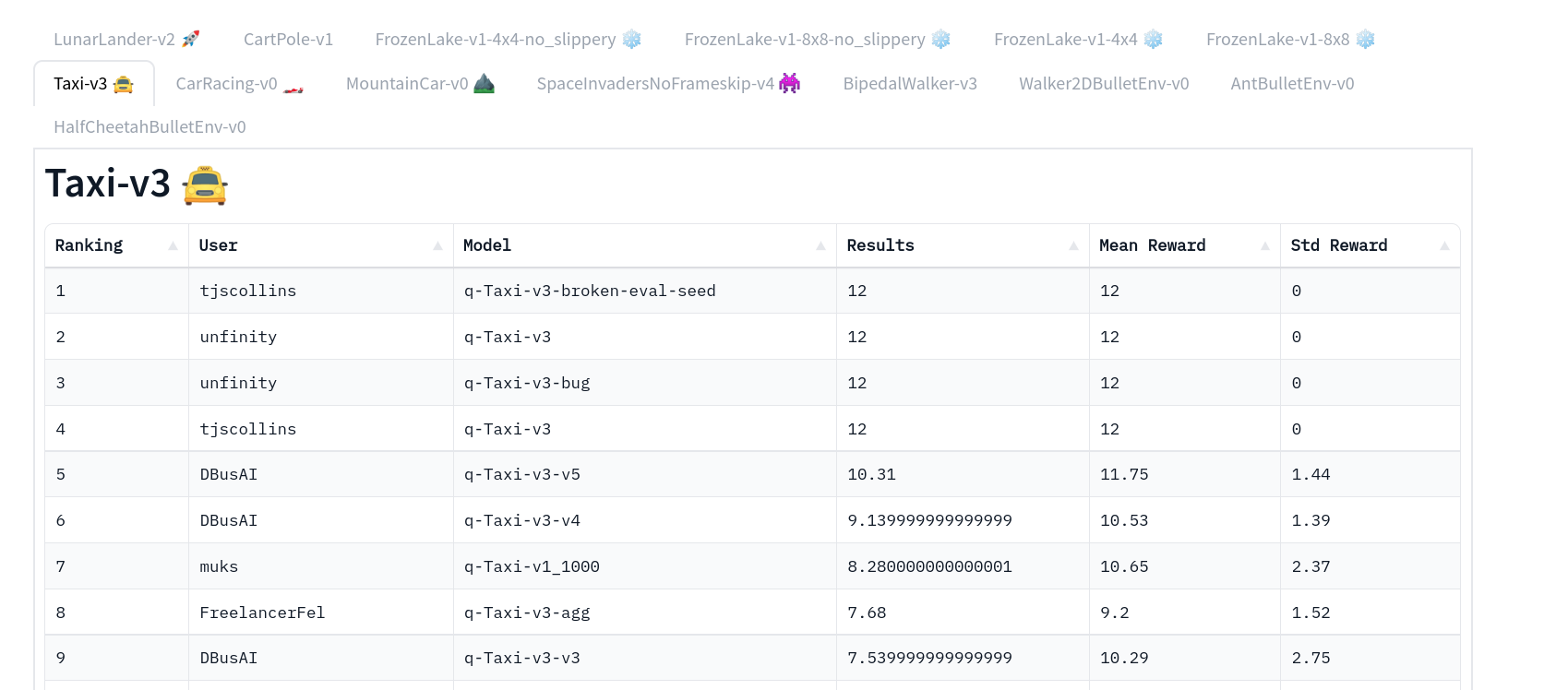
push_to_hub(repo_id=f"{username}/{repo_name}", model=model, env=env)Now that it’s on the Hub, you can compare the results of your Taxi-v3 with your classmates using the leaderboard 🏆 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
Part 3: Load from Hub 🔽
What’s amazing with Hugging Face Hub 🤗 is that you can easily load powerful models from the community.
Loading a saved model from the Hub is really easy:
- You go https://huggingface.co/models?other=q-learning to see the list of all the q-learning saved models.
- You select one and copy its repo_id

- Then we just need to use
load_from_hubwith:
- The repo_id
- The filename: the saved model inside the repo.
Do not modify this code
from urllib.error import HTTPError
from huggingface_hub import hf_hub_download
def load_from_hub(repo_id: str, filename: str) -> str:
"""
Download a model from Hugging Face Hub.
:param repo_id: id of the model repository from the Hugging Face Hub
:param filename: name of the model zip file from the repository
"""
# Get the model from the Hub, download and cache the model on your local disk
pickle_model = hf_hub_download(repo_id=repo_id, filename=filename)
with open(pickle_model, "rb") as f:
downloaded_model_file = pickle.load(f)
return downloaded_model_file.
model = load_from_hub(repo_id="ThomasSimonini/q-Taxi-v3", filename="q-learning.pkl") # Try to use another model
print(model)
env = gym.make(model["env_id"])
evaluate_agent(env, model["max_steps"], model["n_eval_episodes"], model["qtable"], model["eval_seed"])model = load_from_hub(
repo_id="ThomasSimonini/q-FrozenLake-v1-no-slippery", filename="q-learning.pkl"
) # Try to use another model
env = gym.make(model["env_id"], is_slippery=False)
evaluate_agent(env, model["max_steps"], model["n_eval_episodes"], model["qtable"], model["eval_seed"])Some additional challenges 🏆
The best way to learn is to try things on your own! As you saw, the current agent is not doing great. As a first suggestion, you can train for more steps. With 1,000,000 steps, we saw some great results!
In the Leaderboard you will find your agents. Can you get to the top?
Here are some ideas to climb up the leaderboard:
- Train more steps
- Try different hyperparameters by looking at what your classmates have done.
- Push your new trained model on the Hub 🔥
Are walking on ice and driving taxis too boring to you? Try to change the environment, why not use FrozenLake-v1 slippery version? Check how they work using the gymnasium documentation and have fun 🎉.
Congrats 🥳, you’ve just implemented, trained, and uploaded your first Reinforcement Learning agent.
Understanding Q-Learning is an important step to understanding value-based methods.
In the next Unit with Deep Q-Learning, we’ll see that while creating and updating a Q-table was a good strategy — however, it is not scalable.
For instance, imagine you create an agent that learns to play Doom.

Doom is a large environment with a huge state space (millions of different states). Creating and updating a Q-table for that environment would not be efficient.
That’s why we’ll study Deep Q-Learning in the next unit, an algorithm where we use a neural network that approximates, given a state, the different Q-values for each action.
See you in Unit 3! 🔥