
File size: 1,428 Bytes
abdb037 0eb87fa abdb037 0eb87fa 719f66e |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
---
license: gpl-3.0
pipeline_tag: depth-estimation
---
# LapDepth-release
[](https://paperswithcode.com/sota/monocular-depth-estimation-on-kitti-eigen?p=monocular-depth-estimation-using-laplacian)
[](https://paperswithcode.com/sota/monocular-depth-estimation-on-nyu-depth-v2?p=monocular-depth-estimation-using-laplacian)
This repository is a Pytorch implementation of the paper [**"Monocular Depth Estimation Using Laplacian Pyramid-Based Depth Residuals"**](https://ieeexplore.ieee.org/document/9316778)
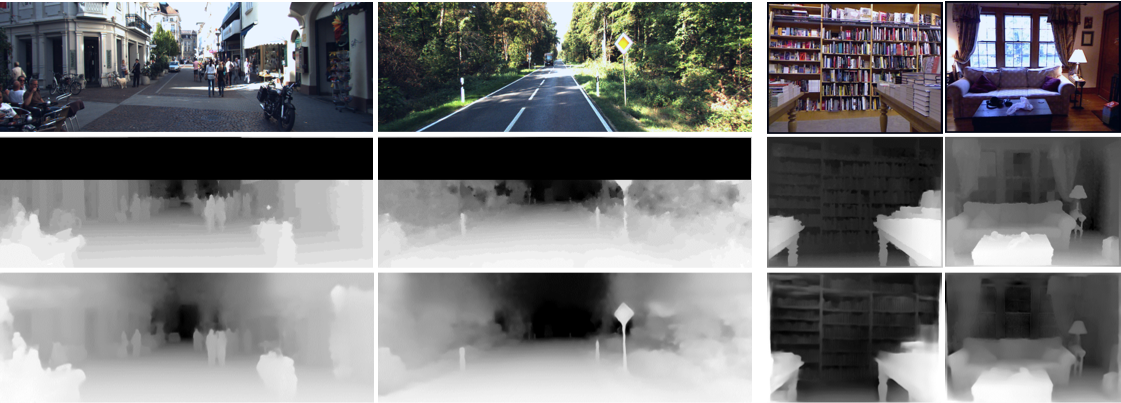
Minsoo Song, Seokjae Lim, and [Wonjun Kim*](https://sites.google.com/view/dcvl)
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT)
# Official Repository: [LapDepth-release](https://github.com/tjqansthd/LapDepth-release)
# License: [GPL-3.0 license](https://github.com/tjqansthd/LapDepth-release/blob/master/LICENSE)
# Usage
```python
from model import LDRN
model = LDRN()
model.load_state_dict(torch.load("lap_depth_kitti_grad.pkl"), strict=False)
model.eval()
``` |