Transformers documentation
Donut
Donut
Overview
The Donut model was proposed in OCR-free Document Understanding Transformer by Geewook Kim, Teakgyu Hong, Moonbin Yim, Jeongyeon Nam, Jinyoung Park, Jinyeong Yim, Wonseok Hwang, Sangdoo Yun, Dongyoon Han, Seunghyun Park. Donut consists of an image Transformer encoder and an autoregressive text Transformer decoder to perform document understanding tasks such as document image classification, form understanding and visual question answering.
The abstract from the paper is the following:
Understanding document images (e.g., invoices) is a core but challenging task since it requires complex functions such as reading text and a holistic understanding of the document. Current Visual Document Understanding (VDU) methods outsource the task of reading text to off-the-shelf Optical Character Recognition (OCR) engines and focus on the understanding task with the OCR outputs. Although such OCR-based approaches have shown promising performance, they suffer from 1) high computational costs for using OCR; 2) inflexibility of OCR models on languages or types of document; 3) OCR error propagation to the subsequent process. To address these issues, in this paper, we introduce a novel OCR-free VDU model named Donut, which stands for Document understanding transformer. As the first step in OCR-free VDU research, we propose a simple architecture (i.e., Transformer) with a pre-training objective (i.e., cross-entropy loss). Donut is conceptually simple yet effective. Through extensive experiments and analyses, we show a simple OCR-free VDU model, Donut, achieves state-of-the-art performances on various VDU tasks in terms of both speed and accuracy. In addition, we offer a synthetic data generator that helps the model pre-training to be flexible in various languages and domains.
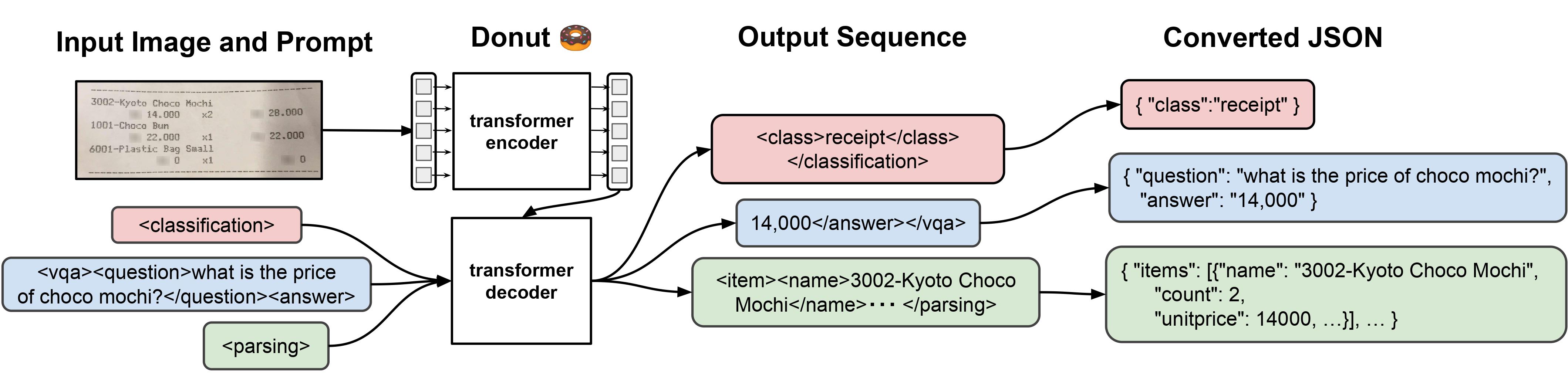 Donut high-level overview. Taken from the original paper.
Donut high-level overview. Taken from the original paper. This model was contributed by nielsr. The original code can be found here.
Tips:
- The quickest way to get started with Donut is by checking the tutorial notebooks, which show how to use the model at inference time as well as fine-tuning on custom data.
- Donut is always used within the VisionEncoderDecoder framework.
Inference
Donut’s VisionEncoderDecoder model accepts images as input and makes use of
generate() to autoregressively generate text given the input image.
The DonutImageProcessor class is responsible for preprocessing the input image and
[XLMRobertaTokenizer/XLMRobertaTokenizerFast] decodes the generated target tokens to the target string. The
DonutProcessor wraps DonutImageProcessor and [XLMRobertaTokenizer/XLMRobertaTokenizerFast]
into a single instance to both extract the input features and decode the predicted token ids.
- Step-by-step Document Image Classification
>>> import re
>>> from transformers import DonutProcessor, VisionEncoderDecoderModel
>>> from datasets import load_dataset
>>> import torch
>>> processor = DonutProcessor.from_pretrained("naver-clova-ix/donut-base-finetuned-rvlcdip")
>>> model = VisionEncoderDecoderModel.from_pretrained("naver-clova-ix/donut-base-finetuned-rvlcdip")
>>> device = "cuda" if torch.cuda.is_available() else "cpu"
>>> model.to(device)
>>> # load document image
>>> dataset = load_dataset("hf-internal-testing/example-documents", split="test")
>>> image = dataset[1]["image"]
>>> # prepare decoder inputs
>>> task_prompt = "<s_rvlcdip>"
>>> decoder_input_ids = processor.tokenizer(task_prompt, add_special_tokens=False, return_tensors="pt").input_ids
>>> pixel_values = processor(image, return_tensors="pt").pixel_values
>>> outputs = model.generate(
... pixel_values.to(device),
... decoder_input_ids=decoder_input_ids.to(device),
... max_length=model.decoder.config.max_position_embeddings,
... pad_token_id=processor.tokenizer.pad_token_id,
... eos_token_id=processor.tokenizer.eos_token_id,
... use_cache=True,
... bad_words_ids=[[processor.tokenizer.unk_token_id]],
... return_dict_in_generate=True,
... )
>>> sequence = processor.batch_decode(outputs.sequences)[0]
>>> sequence = sequence.replace(processor.tokenizer.eos_token, "").replace(processor.tokenizer.pad_token, "")
>>> sequence = re.sub(r"<.*?>", "", sequence, count=1).strip() # remove first task start token
>>> print(processor.token2json(sequence))
{'class': 'advertisement'}- Step-by-step Document Parsing
>>> import re
>>> from transformers import DonutProcessor, VisionEncoderDecoderModel
>>> from datasets import load_dataset
>>> import torch
>>> processor = DonutProcessor.from_pretrained("naver-clova-ix/donut-base-finetuned-cord-v2")
>>> model = VisionEncoderDecoderModel.from_pretrained("naver-clova-ix/donut-base-finetuned-cord-v2")
>>> device = "cuda" if torch.cuda.is_available() else "cpu"
>>> model.to(device)
>>> # load document image
>>> dataset = load_dataset("hf-internal-testing/example-documents", split="test")
>>> image = dataset[2]["image"]
>>> # prepare decoder inputs
>>> task_prompt = "<s_cord-v2>"
>>> decoder_input_ids = processor.tokenizer(task_prompt, add_special_tokens=False, return_tensors="pt").input_ids
>>> pixel_values = processor(image, return_tensors="pt").pixel_values
>>> outputs = model.generate(
... pixel_values.to(device),
... decoder_input_ids=decoder_input_ids.to(device),
... max_length=model.decoder.config.max_position_embeddings,
... pad_token_id=processor.tokenizer.pad_token_id,
... eos_token_id=processor.tokenizer.eos_token_id,
... use_cache=True,
... bad_words_ids=[[processor.tokenizer.unk_token_id]],
... return_dict_in_generate=True,
... )
>>> sequence = processor.batch_decode(outputs.sequences)[0]
>>> sequence = sequence.replace(processor.tokenizer.eos_token, "").replace(processor.tokenizer.pad_token, "")
>>> sequence = re.sub(r"<.*?>", "", sequence, count=1).strip() # remove first task start token
>>> print(processor.token2json(sequence))
{'menu': {'nm': 'CINNAMON SUGAR', 'unitprice': '17,000', 'cnt': '1 x', 'price': '17,000'}, 'sub_total': {'subtotal_price': '17,000'}, 'total': {'total_price': '17,000', 'cashprice': '20,000', 'changeprice': '3,000'}}- Step-by-step Document Visual Question Answering (DocVQA)
>>> import re
>>> from transformers import DonutProcessor, VisionEncoderDecoderModel
>>> from datasets import load_dataset
>>> import torch
>>> processor = DonutProcessor.from_pretrained("naver-clova-ix/donut-base-finetuned-docvqa")
>>> model = VisionEncoderDecoderModel.from_pretrained("naver-clova-ix/donut-base-finetuned-docvqa")
>>> device = "cuda" if torch.cuda.is_available() else "cpu"
>>> model.to(device)
>>> # load document image from the DocVQA dataset
>>> dataset = load_dataset("hf-internal-testing/example-documents", split="test")
>>> image = dataset[0]["image"]
>>> # prepare decoder inputs
>>> task_prompt = "<s_docvqa><s_question>{user_input}</s_question><s_answer>"
>>> question = "When is the coffee break?"
>>> prompt = task_prompt.replace("{user_input}", question)
>>> decoder_input_ids = processor.tokenizer(prompt, add_special_tokens=False, return_tensors="pt").input_ids
>>> pixel_values = processor(image, return_tensors="pt").pixel_values
>>> outputs = model.generate(
... pixel_values.to(device),
... decoder_input_ids=decoder_input_ids.to(device),
... max_length=model.decoder.config.max_position_embeddings,
... pad_token_id=processor.tokenizer.pad_token_id,
... eos_token_id=processor.tokenizer.eos_token_id,
... use_cache=True,
... bad_words_ids=[[processor.tokenizer.unk_token_id]],
... return_dict_in_generate=True,
... )
>>> sequence = processor.batch_decode(outputs.sequences)[0]
>>> sequence = sequence.replace(processor.tokenizer.eos_token, "").replace(processor.tokenizer.pad_token, "")
>>> sequence = re.sub(r"<.*?>", "", sequence, count=1).strip() # remove first task start token
>>> print(processor.token2json(sequence))
{'question': 'When is the coffee break?', 'answer': '11-14 to 11:39 a.m.'}See the model hub to look for Donut checkpoints.
Training
We refer to the tutorial notebooks.
DonutSwinConfig
class transformers.DonutSwinConfig
< source >( image_size = 224 patch_size = 4 num_channels = 3 embed_dim = 96 depths = [2, 2, 6, 2] num_heads = [3, 6, 12, 24] window_size = 7 mlp_ratio = 4.0 qkv_bias = True hidden_dropout_prob = 0.0 attention_probs_dropout_prob = 0.0 drop_path_rate = 0.1 hidden_act = 'gelu' use_absolute_embeddings = False initializer_range = 0.02 layer_norm_eps = 1e-05 **kwargs )
Parameters
- image_size (
int, optional, defaults to 224) — The size (resolution) of each image. - patch_size (
int, optional, defaults to 4) — The size (resolution) of each patch. - num_channels (
int, optional, defaults to 3) — The number of input channels. - embed_dim (
int, optional, defaults to 96) — Dimensionality of patch embedding. - depths (
list(int), optional, defaults to[2, 2, 6, 2]) — Depth of each layer in the Transformer encoder. - num_heads (
list(int), optional, defaults to[3, 6, 12, 24]) — Number of attention heads in each layer of the Transformer encoder. - window_size (
int, optional, defaults to 7) — Size of windows. - mlp_ratio (
float, optional, defaults to 4.0) — Ratio of MLP hidden dimensionality to embedding dimensionality. - qkv_bias (
bool, optional, defaults toTrue) — Whether or not a learnable bias should be added to the queries, keys and values. - hidden_dropout_prob (
float, optional, defaults to 0.0) — The dropout probability for all fully connected layers in the embeddings and encoder. - attention_probs_dropout_prob (
float, optional, defaults to 0.0) — The dropout ratio for the attention probabilities. - drop_path_rate (
float, optional, defaults to 0.1) — Stochastic depth rate. - hidden_act (
strorfunction, optional, defaults to"gelu") — The non-linear activation function (function or string) in the encoder. If string,"gelu","relu","selu"and"gelu_new"are supported. - use_absolute_embeddings (
bool, optional, defaults toFalse) — Whether or not to add absolute position embeddings to the patch embeddings. - initializer_range (
float, optional, defaults to 0.02) — The standard deviation of the truncated_normal_initializer for initializing all weight matrices. - layer_norm_eps (
float, optional, defaults to 1e-05) — The epsilon used by the layer normalization layers.
This is the configuration class to store the configuration of a DonutSwinModel. It is used to instantiate a Donut model according to the specified arguments, defining the model architecture. Instantiating a configuration with the defaults will yield a similar configuration to that of the Donut naver-clova-ix/donut-base architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
Example:
>>> from transformers import DonutSwinConfig, DonutSwinModel
>>> # Initializing a Donut naver-clova-ix/donut-base style configuration
>>> configuration = DonutSwinConfig()
>>> # Randomly initializing a model from the naver-clova-ix/donut-base style configuration
>>> model = DonutSwinModel(configuration)
>>> # Accessing the model configuration
>>> configuration = model.configDonutImageProcessor
class transformers.DonutImageProcessor
< source >( do_resize: bool = True size: typing.Dict[str, int] = None resample: Resampling = <Resampling.BILINEAR: 2> do_thumbnail: bool = True do_align_long_axis: bool = False do_pad: bool = True do_rescale: bool = True rescale_factor: typing.Union[int, float] = 0.00392156862745098 do_normalize: bool = True image_mean: typing.Union[float, typing.List[float], NoneType] = None image_std: typing.Union[float, typing.List[float], NoneType] = None **kwargs )
Parameters
- do_resize (
bool, optional, defaults toTrue) — Whether to resize the image’s (height, width) dimensions to the specifiedsize. Can be overridden bydo_resizein thepreprocessmethod. - size (
Dict[str, int]optional, defaults to{"shortest_edge" -- 224}): Size of the image after resizing. The shortest edge of the image is resized to size[“shortest_edge”], with the longest edge resized to keep the input aspect ratio. Can be overridden bysizein thepreprocessmethod. - resample (
PILImageResampling, optional, defaults toResampling.BILINEAR) — Resampling filter to use if resizing the image. Can be overridden byresamplein thepreprocessmethod. - do_thumbnail (
bool, optional, defaults toTrue) — Whether to resize the image using thumbnail method. - do_align_long_axis (
bool, optional, defaults toFalse) — Whether to align the long axis of the image with the long axis ofsizeby rotating by 90 degrees. - do_pad (
bool, optional, defaults toTrue) — Whether to pad the image. Ifrandom_paddingis set toTrueinpreprocess, each image is padded with a random amont of padding on each size, up to the largest image size in the batch. Otherwise, all images are padded to the largest image size in the batch. - do_rescale (
bool, optional, defaults toTrue) — Whether to rescale the image by the specified scalerescale_factor. Can be overridden bydo_rescalein thepreprocessmethod. - rescale_factor (
intorfloat, optional, defaults to1/255) — Scale factor to use if rescaling the image. Can be overridden byrescale_factorin thepreprocessmethod. - do_normalize (
bool, optional, defaults toTrue) — Whether to normalize the image. Can be overridden bydo_normalizein thepreprocessmethod. - image_mean (
floatorList[float], optional, defaults toIMAGENET_STANDARD_MEAN) — Mean to use if normalizing the image. This is a float or list of floats the length of the number of channels in the image. Can be overridden by theimage_meanparameter in thepreprocessmethod. - image_std (
floatorList[float], optional, defaults toIMAGENET_STANDARD_STD) — Image standard deviation.
Constructs a Donut image processor.
preprocess
< source >( images: typing.Union[ForwardRef('PIL.Image.Image'), numpy.ndarray, ForwardRef('torch.Tensor'), typing.List[ForwardRef('PIL.Image.Image')], typing.List[numpy.ndarray], typing.List[ForwardRef('torch.Tensor')]] do_resize: bool = None size: typing.Dict[str, int] = None resample: Resampling = None do_thumbnail: bool = None do_align_long_axis: bool = None do_pad: bool = None random_padding: bool = False do_rescale: bool = None rescale_factor: float = None do_normalize: bool = None image_mean: typing.Union[float, typing.List[float], NoneType] = None image_std: typing.Union[float, typing.List[float], NoneType] = None return_tensors: typing.Union[transformers.utils.generic.TensorType, str, NoneType] = None data_format: typing.Optional[transformers.image_utils.ChannelDimension] = <ChannelDimension.FIRST: 'channels_first'> input_data_format: typing.Union[str, transformers.image_utils.ChannelDimension, NoneType] = None **kwargs )
Parameters
- images (
ImageInput) — Image to preprocess. Expects a single or batch of images with pixel values ranging from 0 to 255. If passing in images with pixel values between 0 and 1, setdo_rescale=False. - do_resize (
bool, optional, defaults toself.do_resize) — Whether to resize the image. - size (
Dict[str, int], optional, defaults toself.size) — Size of the image after resizing. Shortest edge of the image is resized to min(size[“height”], size[“width”]) with the longest edge resized to keep the input aspect ratio. - resample (
int, optional, defaults toself.resample) — Resampling filter to use if resizing the image. This can be one of the enumPILImageResampling. Only has an effect ifdo_resizeis set toTrue. - do_thumbnail (
bool, optional, defaults toself.do_thumbnail) — Whether to resize the image using thumbnail method. - do_align_long_axis (
bool, optional, defaults toself.do_align_long_axis) — Whether to align the long axis of the image with the long axis ofsizeby rotating by 90 degrees. - do_pad (
bool, optional, defaults toself.do_pad) — Whether to pad the image. Ifrandom_paddingis set toTrue, each image is padded with a random amont of padding on each size, up to the largest image size in the batch. Otherwise, all images are padded to the largest image size in the batch. - random_padding (
bool, optional, defaults toself.random_padding) — Whether to use random padding when padding the image. IfTrue, each image in the batch with be padded with a random amount of padding on each side up to the size of the largest image in the batch. - do_rescale (
bool, optional, defaults toself.do_rescale) — Whether to rescale the image pixel values. - rescale_factor (
float, optional, defaults toself.rescale_factor) — Rescale factor to rescale the image by ifdo_rescaleis set toTrue. - do_normalize (
bool, optional, defaults toself.do_normalize) — Whether to normalize the image. - image_mean (
floatorList[float], optional, defaults toself.image_mean) — Image mean to use for normalization. - image_std (
floatorList[float], optional, defaults toself.image_std) — Image standard deviation to use for normalization. - return_tensors (
strorTensorType, optional) — The type of tensors to return. Can be one of:- Unset: Return a list of
np.ndarray. TensorType.TENSORFLOWor'tf': Return a batch of typetf.Tensor.TensorType.PYTORCHor'pt': Return a batch of typetorch.Tensor.TensorType.NUMPYor'np': Return a batch of typenp.ndarray.TensorType.JAXor'jax': Return a batch of typejax.numpy.ndarray.
- Unset: Return a list of
- data_format (
ChannelDimensionorstr, optional, defaults toChannelDimension.FIRST) — The channel dimension format for the output image. Can be one of:ChannelDimension.FIRST: image in (num_channels, height, width) format.ChannelDimension.LAST: image in (height, width, num_channels) format.- Unset: defaults to the channel dimension format of the input image.
- input_data_format (
ChannelDimensionorstr, optional) — The channel dimension format for the input image. If unset, the channel dimension format is inferred from the input image. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format."none"orChannelDimension.NONE: image in (height, width) format.
Preprocess an image or batch of images.
DonutFeatureExtractor
Preprocess an image or a batch of images.
DonutProcessor
class transformers.DonutProcessor
< source >( image_processor = None tokenizer = None **kwargs )
Parameters
- image_processor (DonutImageProcessor, optional) — An instance of DonutImageProcessor. The image processor is a required input.
- tokenizer ([
XLMRobertaTokenizer/XLMRobertaTokenizerFast], optional) — An instance of [XLMRobertaTokenizer/XLMRobertaTokenizerFast]. The tokenizer is a required input.
Constructs a Donut processor which wraps a Donut image processor and an XLMRoBERTa tokenizer into a single processor.
DonutProcessor offers all the functionalities of DonutImageProcessor and
[XLMRobertaTokenizer/XLMRobertaTokenizerFast]. See the call() and
decode() for more information.
When used in normal mode, this method forwards all its arguments to AutoImageProcessor’s
__call__() and returns its output. If used in the context
as_target_processor() this method forwards all its arguments to DonutTokenizer’s
~DonutTokenizer.__call__. Please refer to the doctsring of the above two methods for more information.
from_pretrained
< source >( pretrained_model_name_or_path: typing.Union[str, os.PathLike] cache_dir: typing.Union[str, os.PathLike, NoneType] = None force_download: bool = False local_files_only: bool = False token: typing.Union[bool, str, NoneType] = None revision: str = 'main' **kwargs )
Parameters
- pretrained_model_name_or_path (
stroros.PathLike) — This can be either:- a string, the model id of a pretrained feature_extractor hosted inside a model repo on
huggingface.co. Valid model ids can be located at the root-level, like
bert-base-uncased, or namespaced under a user or organization name, likedbmdz/bert-base-german-cased. - a path to a directory containing a feature extractor file saved using the
save_pretrained() method, e.g.,
./my_model_directory/. - a path or url to a saved feature extractor JSON file, e.g.,
./my_model_directory/preprocessor_config.json. **kwargs — Additional keyword arguments passed along to both from_pretrained() and~tokenization_utils_base.PreTrainedTokenizer.from_pretrained.
- a string, the model id of a pretrained feature_extractor hosted inside a model repo on
huggingface.co. Valid model ids can be located at the root-level, like
Instantiate a processor associated with a pretrained model.
This class method is simply calling the feature extractor
from_pretrained(), image processor
ImageProcessingMixin and the tokenizer
~tokenization_utils_base.PreTrainedTokenizer.from_pretrained methods. Please refer to the docstrings of the
methods above for more information.
save_pretrained
< source >( save_directory push_to_hub: bool = False **kwargs )
Parameters
- save_directory (
stroros.PathLike) — Directory where the feature extractor JSON file and the tokenizer files will be saved (directory will be created if it does not exist). - push_to_hub (
bool, optional, defaults toFalse) — Whether or not to push your model to the Hugging Face model hub after saving it. You can specify the repository you want to push to withrepo_id(will default to the name ofsave_directoryin your namespace). - kwargs (
Dict[str, Any], optional) — Additional key word arguments passed along to the push_to_hub() method.
Saves the attributes of this processor (feature extractor, tokenizer…) in the specified directory so that it can be reloaded using the from_pretrained() method.
This class method is simply calling save_pretrained() and save_pretrained(). Please refer to the docstrings of the methods above for more information.
This method forwards all its arguments to DonutTokenizer’s batch_decode(). Please refer to the docstring of this method for more information.
This method forwards all its arguments to DonutTokenizer’s decode(). Please refer to the docstring of this method for more information.
DonutSwinModel
class transformers.DonutSwinModel
< source >( config add_pooling_layer = True use_mask_token = False )
Parameters
- config (DonutSwinConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
The bare Donut Swin Model transformer outputting raw hidden-states without any specific head on top. This model is a PyTorch torch.nn.Module sub-class. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >( pixel_values: typing.Optional[torch.FloatTensor] = None bool_masked_pos: typing.Optional[torch.BoolTensor] = None head_mask: typing.Optional[torch.FloatTensor] = None output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.models.donut.modeling_donut_swin.DonutSwinModelOutput or tuple(torch.FloatTensor)
Parameters
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See DonutImageProcessor.call() for details. - head_mask (
torch.FloatTensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
- output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. - bool_masked_pos (
torch.BoolTensorof shape(batch_size, num_patches)) — Boolean masked positions. Indicates which patches are masked (1) and which aren’t (0).
Returns
transformers.models.donut.modeling_donut_swin.DonutSwinModelOutput or tuple(torch.FloatTensor)
A transformers.models.donut.modeling_donut_swin.DonutSwinModelOutput or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (DonutSwinConfig) and inputs.
-
last_hidden_state (
torch.FloatTensorof shape(batch_size, sequence_length, hidden_size)) — Sequence of hidden-states at the output of the last layer of the model. -
pooler_output (
torch.FloatTensorof shape(batch_size, hidden_size), optional, returned whenadd_pooling_layer=Trueis passed) — Average pooling of the last layer hidden-state. -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings + one for the output of each stage) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the initial embedding outputs.
-
attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each stage) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
-
reshaped_hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings + one for the output of each stage) of shape(batch_size, hidden_size, height, width).Hidden-states of the model at the output of each layer plus the initial embedding outputs reshaped to include the spatial dimensions.
The DonutSwinModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoImageProcessor, DonutSwinModel
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("https://huggingface.co/naver-clova-ix/donut-base")
>>> model = DonutSwinModel.from_pretrained("https://huggingface.co/naver-clova-ix/donut-base")
>>> inputs = image_processor(image, return_tensors="pt")
>>> with torch.no_grad():
... outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_state
>>> list(last_hidden_states.shape)
[1, 49, 768]