Transformers documentation
Vision Transformer (ViT)
Vision Transformer (ViT)
Overview
The Vision Transformer (ViT) model was proposed in An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale by Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Unterthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Sylvain Gelly, Jakob Uszkoreit, Neil Houlsby. It’s the first paper that successfully trains a Transformer encoder on ImageNet, attaining very good results compared to familiar convolutional architectures.
The abstract from the paper is the following:
While the Transformer architecture has become the de-facto standard for natural language processing tasks, its applications to computer vision remain limited. In vision, attention is either applied in conjunction with convolutional networks, or used to replace certain components of convolutional networks while keeping their overall structure in place. We show that this reliance on CNNs is not necessary and a pure transformer applied directly to sequences of image patches can perform very well on image classification tasks. When pre-trained on large amounts of data and transferred to multiple mid-sized or small image recognition benchmarks (ImageNet, CIFAR-100, VTAB, etc.), Vision Transformer (ViT) attains excellent results compared to state-of-the-art convolutional networks while requiring substantially fewer computational resources to train.
Tips:
- Demo notebooks regarding inference as well as fine-tuning ViT on custom data can be found here.
- To feed images to the Transformer encoder, each image is split into a sequence of fixed-size non-overlapping patches, which are then linearly embedded. A [CLS] token is added to serve as representation of an entire image, which can be used for classification. The authors also add absolute position embeddings, and feed the resulting sequence of vectors to a standard Transformer encoder.
- As the Vision Transformer expects each image to be of the same size (resolution), one can use ViTImageProcessor to resize (or rescale) and normalize images for the model.
- Both the patch resolution and image resolution used during pre-training or fine-tuning are reflected in the name of
each checkpoint. For example,
google/vit-base-patch16-224refers to a base-sized architecture with patch resolution of 16x16 and fine-tuning resolution of 224x224. All checkpoints can be found on the hub. - The available checkpoints are either (1) pre-trained on ImageNet-21k (a collection of 14 million images and 21k classes) only, or (2) also fine-tuned on ImageNet (also referred to as ILSVRC 2012, a collection of 1.3 million images and 1,000 classes).
- The Vision Transformer was pre-trained using a resolution of 224x224. During fine-tuning, it is often beneficial to use a higher resolution than pre-training (Touvron et al., 2019), (Kolesnikov et al., 2020). In order to fine-tune at higher resolution, the authors perform 2D interpolation of the pre-trained position embeddings, according to their location in the original image.
- The best results are obtained with supervised pre-training, which is not the case in NLP. The authors also performed an experiment with a self-supervised pre-training objective, namely masked patched prediction (inspired by masked language modeling). With this approach, the smaller ViT-B/16 model achieves 79.9% accuracy on ImageNet, a significant improvement of 2% to training from scratch, but still 4% behind supervised pre-training.
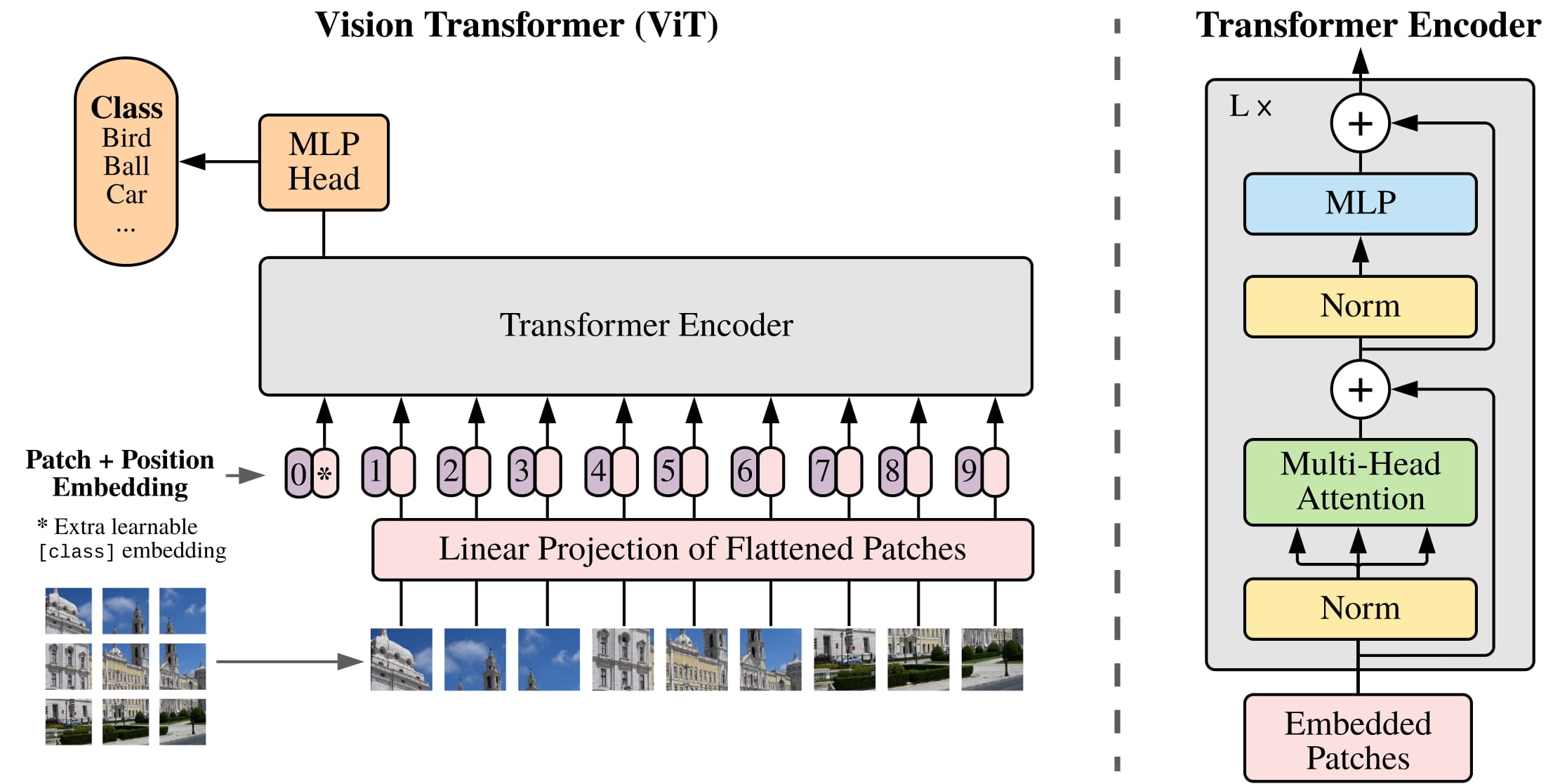 ViT architecture. Taken from the original paper.
ViT architecture. Taken from the original paper. Following the original Vision Transformer, some follow-up works have been made:
DeiT (Data-efficient Image Transformers) by Facebook AI. DeiT models are distilled vision transformers. The authors of DeiT also released more efficiently trained ViT models, which you can directly plug into ViTModel or ViTForImageClassification. There are 4 variants available (in 3 different sizes): facebook/deit-tiny-patch16-224, facebook/deit-small-patch16-224, facebook/deit-base-patch16-224 and facebook/deit-base-patch16-384. Note that one should use DeiTImageProcessor in order to prepare images for the model.
BEiT (BERT pre-training of Image Transformers) by Microsoft Research. BEiT models outperform supervised pre-trained vision transformers using a self-supervised method inspired by BERT (masked image modeling) and based on a VQ-VAE.
DINO (a method for self-supervised training of Vision Transformers) by Facebook AI. Vision Transformers trained using the DINO method show very interesting properties not seen with convolutional models. They are capable of segmenting objects, without having ever been trained to do so. DINO checkpoints can be found on the hub.
MAE (Masked Autoencoders) by Facebook AI. By pre-training Vision Transformers to reconstruct pixel values for a high portion (75%) of masked patches (using an asymmetric encoder-decoder architecture), the authors show that this simple method outperforms supervised pre-training after fine-tuning.
This model was contributed by nielsr. The original code (written in JAX) can be found here.
Note that we converted the weights from Ross Wightman’s timm library, who already converted the weights from JAX to PyTorch. Credits go to him!
Resources
A list of official Hugging Face and community (indicated by 🌎) resources to help you get started with ViT.
- ViTForImageClassification is supported by this example script and notebook.
- A blog on fine-tuning ViTForImageClassification on a custom dataset can be found here.
- More demo notebooks to fine-tune ViTForImageClassification can be found here.
- Image classification task guide
Besides that:
- ViTForMaskedImageModeling is supported by this example script.
If you’re interested in submitting a resource to be included here, please feel free to open a Pull Request and we’ll review it! The resource should ideally demonstrate something new instead of duplicating an existing resource.
Resources
A list of official Hugging Face and community (indicated by 🌎) resources to help you get started with ViT. If you’re interested in submitting a resource to be included here, please feel free to open a Pull Request and we’ll review it! The resource should ideally demonstrate something new instead of duplicating an existing resource.
ViTForImageClassification is supported by:
- A blog post on how to Fine-Tune ViT for Image Classification with Hugging Face Transformers
- A blog post on Image Classification with Hugging Face Transformers and
Keras - A notebook on Fine-tuning for Image Classification with Hugging Face Transformers
- A notebook on how to Fine-tune the Vision Transformer on CIFAR-10 with the Hugging Face Trainer
- A notebook on how to Fine-tune the Vision Transformer on CIFAR-10 with PyTorch Lightning
⚗️ Optimization
- A blog post on how to Accelerate Vision Transformer (ViT) with Quantization using Optimum
⚡️ Inference
- A notebook on Quick demo: Vision Transformer (ViT) by Google Brain
🚀 Deploy
- A blog post on Deploying Tensorflow Vision Models in Hugging Face with TF Serving
- A blog post on Deploying Hugging Face ViT on Vertex AI
- A blog post on Deploying Hugging Face ViT on Kubernetes with TF Serving
ViTConfig
class transformers.ViTConfig
< source >( hidden_size = 768 num_hidden_layers = 12 num_attention_heads = 12 intermediate_size = 3072 hidden_act = 'gelu' hidden_dropout_prob = 0.0 attention_probs_dropout_prob = 0.0 initializer_range = 0.02 layer_norm_eps = 1e-12 image_size = 224 patch_size = 16 num_channels = 3 qkv_bias = True encoder_stride = 16 **kwargs )
Parameters
- hidden_size (
int, optional, defaults to 768) — Dimensionality of the encoder layers and the pooler layer. - num_hidden_layers (
int, optional, defaults to 12) — Number of hidden layers in the Transformer encoder. - num_attention_heads (
int, optional, defaults to 12) — Number of attention heads for each attention layer in the Transformer encoder. - intermediate_size (
int, optional, defaults to 3072) — Dimensionality of the “intermediate” (i.e., feed-forward) layer in the Transformer encoder. - hidden_act (
strorfunction, optional, defaults to"gelu") — The non-linear activation function (function or string) in the encoder and pooler. If string,"gelu","relu","selu"and"gelu_new"are supported. - hidden_dropout_prob (
float, optional, defaults to 0.0) — The dropout probability for all fully connected layers in the embeddings, encoder, and pooler. - attention_probs_dropout_prob (
float, optional, defaults to 0.0) — The dropout ratio for the attention probabilities. - initializer_range (
float, optional, defaults to 0.02) — The standard deviation of the truncated_normal_initializer for initializing all weight matrices. - layer_norm_eps (
float, optional, defaults to 1e-12) — The epsilon used by the layer normalization layers. - image_size (
int, optional, defaults to224) — The size (resolution) of each image. - patch_size (
int, optional, defaults to16) — The size (resolution) of each patch. - num_channels (
int, optional, defaults to3) — The number of input channels. - qkv_bias (
bool, optional, defaults toTrue) — Whether to add a bias to the queries, keys and values. - encoder_stride (
int,optional, defaults to 16) — Factor to increase the spatial resolution by in the decoder head for masked image modeling.
This is the configuration class to store the configuration of a ViTModel. It is used to instantiate an ViT model according to the specified arguments, defining the model architecture. Instantiating a configuration with the defaults will yield a similar configuration to that of the ViT google/vit-base-patch16-224 architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
Example:
>>> from transformers import ViTConfig, ViTModel
>>> # Initializing a ViT vit-base-patch16-224 style configuration
>>> configuration = ViTConfig()
>>> # Initializing a model (with random weights) from the vit-base-patch16-224 style configuration
>>> model = ViTModel(configuration)
>>> # Accessing the model configuration
>>> configuration = model.configViTFeatureExtractor
Preprocess an image or a batch of images.
ViTImageProcessor
class transformers.ViTImageProcessor
< source >( do_resize: bool = True size: typing.Union[typing.Dict[str, int], NoneType] = None resample: Resampling = <Resampling.BILINEAR: 2> do_rescale: bool = True rescale_factor: typing.Union[int, float] = 0.00392156862745098 do_normalize: bool = True image_mean: typing.Union[float, typing.List[float], NoneType] = None image_std: typing.Union[float, typing.List[float], NoneType] = None **kwargs )
Parameters
- do_resize (
bool, optional, defaults toTrue) — Whether to resize the image’s (height, width) dimensions to the specified(size["height"], size["width"]). Can be overridden by thedo_resizeparameter in thepreprocessmethod. - size (
dict, optional, defaults to{"height" -- 224, "width": 224}): Size of the output image after resizing. Can be overridden by thesizeparameter in thepreprocessmethod. - resample (
PILImageResampling, optional, defaults toPILImageResampling.BILINEAR) — Resampling filter to use if resizing the image. Can be overridden by theresampleparameter in thepreprocessmethod. - do_rescale (
bool, optional, defaults toTrue) — Whether to rescale the image by the specified scalerescale_factor. Can be overridden by thedo_rescaleparameter in thepreprocessmethod. - rescale_factor (
intorfloat, optional, defaults to1/255) — Scale factor to use if rescaling the image. Can be overridden by therescale_factorparameter in thepreprocessmethod. - do_normalize (
bool, optional, defaults toTrue) — Whether to normalize the image. Can be overridden by thedo_normalizeparameter in thepreprocessmethod. - image_mean (
floatorList[float], optional, defaults toIMAGENET_STANDARD_MEAN) — Mean to use if normalizing the image. This is a float or list of floats the length of the number of channels in the image. Can be overridden by theimage_meanparameter in thepreprocessmethod. - image_std (
floatorList[float], optional, defaults toIMAGENET_STANDARD_STD) — Standard deviation to use if normalizing the image. This is a float or list of floats the length of the number of channels in the image. Can be overridden by theimage_stdparameter in thepreprocessmethod.
Constructs a ViT image processor.
preprocess
< source >( images: typing.Union[ForwardRef('PIL.Image.Image'), numpy.ndarray, ForwardRef('torch.Tensor'), typing.List[ForwardRef('PIL.Image.Image')], typing.List[numpy.ndarray], typing.List[ForwardRef('torch.Tensor')]] do_resize: typing.Optional[bool] = None size: typing.Dict[str, int] = None resample: Resampling = None do_rescale: typing.Optional[bool] = None rescale_factor: typing.Optional[float] = None do_normalize: typing.Optional[bool] = None image_mean: typing.Union[float, typing.List[float], NoneType] = None image_std: typing.Union[float, typing.List[float], NoneType] = None return_tensors: typing.Union[str, transformers.utils.generic.TensorType, NoneType] = None data_format: typing.Union[str, transformers.image_utils.ChannelDimension] = <ChannelDimension.FIRST: 'channels_first'> input_data_format: typing.Union[str, transformers.image_utils.ChannelDimension, NoneType] = None **kwargs )
Parameters
- images (
ImageInput) — Image to preprocess. Expects a single or batch of images with pixel values ranging from 0 to 255. If passing in images with pixel values between 0 and 1, setdo_rescale=False. - do_resize (
bool, optional, defaults toself.do_resize) — Whether to resize the image. - size (
Dict[str, int], optional, defaults toself.size) — Dictionary in the format{"height": h, "width": w}specifying the size of the output image after resizing. - resample (
PILImageResamplingfilter, optional, defaults toself.resample) —PILImageResamplingfilter to use if resizing the image e.g.PILImageResampling.BILINEAR. Only has an effect ifdo_resizeis set toTrue. - do_rescale (
bool, optional, defaults toself.do_rescale) — Whether to rescale the image values between [0 - 1]. - rescale_factor (
float, optional, defaults toself.rescale_factor) — Rescale factor to rescale the image by ifdo_rescaleis set toTrue. - do_normalize (
bool, optional, defaults toself.do_normalize) — Whether to normalize the image. - image_mean (
floatorList[float], optional, defaults toself.image_mean) — Image mean to use ifdo_normalizeis set toTrue. - image_std (
floatorList[float], optional, defaults toself.image_std) — Image standard deviation to use ifdo_normalizeis set toTrue. - return_tensors (
strorTensorType, optional) — The type of tensors to return. Can be one of:- Unset: Return a list of
np.ndarray. TensorType.TENSORFLOWor'tf': Return a batch of typetf.Tensor.TensorType.PYTORCHor'pt': Return a batch of typetorch.Tensor.TensorType.NUMPYor'np': Return a batch of typenp.ndarray.TensorType.JAXor'jax': Return a batch of typejax.numpy.ndarray.
- Unset: Return a list of
- data_format (
ChannelDimensionorstr, optional, defaults toChannelDimension.FIRST) — The channel dimension format for the output image. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format.- Unset: Use the channel dimension format of the input image.
- input_data_format (
ChannelDimensionorstr, optional) — The channel dimension format for the input image. If unset, the channel dimension format is inferred from the input image. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format."none"orChannelDimension.NONE: image in (height, width) format.
Preprocess an image or batch of images.
ViTModel
class transformers.ViTModel
< source >( config: ViTConfig add_pooling_layer: bool = True use_mask_token: bool = False )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
The bare ViT Model transformer outputting raw hidden-states without any specific head on top. This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >( pixel_values: typing.Optional[torch.Tensor] = None bool_masked_pos: typing.Optional[torch.BoolTensor] = None head_mask: typing.Optional[torch.Tensor] = None output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None interpolate_pos_encoding: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.modeling_outputs.BaseModelOutputWithPooling or tuple(torch.FloatTensor)
Parameters
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See ViTImageProcessor.call() for details. - head_mask (
torch.FloatTensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
- output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. - interpolate_pos_encoding (
bool, optional) — Whether to interpolate the pre-trained position encodings. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. - bool_masked_pos (
torch.BoolTensorof shape(batch_size, num_patches), optional) — Boolean masked positions. Indicates which patches are masked (1) and which aren’t (0).
Returns
transformers.modeling_outputs.BaseModelOutputWithPooling or tuple(torch.FloatTensor)
A transformers.modeling_outputs.BaseModelOutputWithPooling or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (ViTConfig) and inputs.
-
last_hidden_state (
torch.FloatTensorof shape(batch_size, sequence_length, hidden_size)) — Sequence of hidden-states at the output of the last layer of the model. -
pooler_output (
torch.FloatTensorof shape(batch_size, hidden_size)) — Last layer hidden-state of the first token of the sequence (classification token) after further processing through the layers used for the auxiliary pretraining task. E.g. for BERT-family of models, this returns the classification token after processing through a linear layer and a tanh activation function. The linear layer weights are trained from the next sentence prediction (classification) objective during pretraining. -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each layer) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the optional initial embedding outputs.
-
attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The ViTModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoImageProcessor, ViTModel
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("google/vit-base-patch16-224-in21k")
>>> model = ViTModel.from_pretrained("google/vit-base-patch16-224-in21k")
>>> inputs = image_processor(image, return_tensors="pt")
>>> with torch.no_grad():
... outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_state
>>> list(last_hidden_states.shape)
[1, 197, 768]ViTForMaskedImageModeling
class transformers.ViTForMaskedImageModeling
< source >( config: ViTConfig )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
ViT Model with a decoder on top for masked image modeling, as proposed in SimMIM.
Note that we provide a script to pre-train this model on custom data in our examples directory.
This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >( pixel_values: typing.Optional[torch.Tensor] = None bool_masked_pos: typing.Optional[torch.BoolTensor] = None head_mask: typing.Optional[torch.Tensor] = None output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None interpolate_pos_encoding: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.modeling_outputs.MaskedImageModelingOutput or tuple(torch.FloatTensor)
Parameters
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See ViTImageProcessor.call() for details. - head_mask (
torch.FloatTensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
- output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. - interpolate_pos_encoding (
bool, optional) — Whether to interpolate the pre-trained position encodings. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. - bool_masked_pos (
torch.BoolTensorof shape(batch_size, num_patches)) — Boolean masked positions. Indicates which patches are masked (1) and which aren’t (0).
Returns
transformers.modeling_outputs.MaskedImageModelingOutput or tuple(torch.FloatTensor)
A transformers.modeling_outputs.MaskedImageModelingOutput or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (ViTConfig) and inputs.
- loss (
torch.FloatTensorof shape(1,), optional, returned whenbool_masked_posis provided) — Reconstruction loss. - reconstruction (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Reconstructed / completed images. - hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or - when
config.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each stage) of shape(batch_size, sequence_length, hidden_size). Hidden-states (also called feature maps) of the model at the output of each stage. - attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or when config.output_attentions=True): Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, patch_size, sequence_length). Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The ViTForMaskedImageModeling forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Examples:
>>> from transformers import AutoImageProcessor, ViTForMaskedImageModeling
>>> import torch
>>> from PIL import Image
>>> import requests
>>> url = "http://images.cocodataset.org/val2017/000000039769.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw)
>>> image_processor = AutoImageProcessor.from_pretrained("google/vit-base-patch16-224-in21k")
>>> model = ViTForMaskedImageModeling.from_pretrained("google/vit-base-patch16-224-in21k")
>>> num_patches = (model.config.image_size // model.config.patch_size) ** 2
>>> pixel_values = image_processor(images=image, return_tensors="pt").pixel_values
>>> # create random boolean mask of shape (batch_size, num_patches)
>>> bool_masked_pos = torch.randint(low=0, high=2, size=(1, num_patches)).bool()
>>> outputs = model(pixel_values, bool_masked_pos=bool_masked_pos)
>>> loss, reconstructed_pixel_values = outputs.loss, outputs.reconstruction
>>> list(reconstructed_pixel_values.shape)
[1, 3, 224, 224]ViTForImageClassification
class transformers.ViTForImageClassification
< source >( config: ViTConfig )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
ViT Model transformer with an image classification head on top (a linear layer on top of the final hidden state of the [CLS] token) e.g. for ImageNet.
Note that it’s possible to fine-tune ViT on higher resolution images than the ones it has been trained on, by
setting interpolate_pos_encoding to True in the forward of the model. This will interpolate the pre-trained
position embeddings to the higher resolution.
This model is a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >( pixel_values: typing.Optional[torch.Tensor] = None head_mask: typing.Optional[torch.Tensor] = None labels: typing.Optional[torch.Tensor] = None output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None interpolate_pos_encoding: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.modeling_outputs.ImageClassifierOutput or tuple(torch.FloatTensor)
Parameters
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See ViTImageProcessor.call() for details. - head_mask (
torch.FloatTensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
- output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. - interpolate_pos_encoding (
bool, optional) — Whether to interpolate the pre-trained position encodings. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. - labels (
torch.LongTensorof shape(batch_size,), optional) — Labels for computing the image classification/regression loss. Indices should be in[0, ..., config.num_labels - 1]. Ifconfig.num_labels == 1a regression loss is computed (Mean-Square loss), Ifconfig.num_labels > 1a classification loss is computed (Cross-Entropy).
Returns
transformers.modeling_outputs.ImageClassifierOutput or tuple(torch.FloatTensor)
A transformers.modeling_outputs.ImageClassifierOutput or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (ViTConfig) and inputs.
-
loss (
torch.FloatTensorof shape(1,), optional, returned whenlabelsis provided) — Classification (or regression if config.num_labels==1) loss. -
logits (
torch.FloatTensorof shape(batch_size, config.num_labels)) — Classification (or regression if config.num_labels==1) scores (before SoftMax). -
hidden_states (
tuple(torch.FloatTensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftorch.FloatTensor(one for the output of the embeddings, if the model has an embedding layer, + one for the output of each stage) of shape(batch_size, sequence_length, hidden_size). Hidden-states (also called feature maps) of the model at the output of each stage. -
attentions (
tuple(torch.FloatTensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftorch.FloatTensor(one for each layer) of shape(batch_size, num_heads, patch_size, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The ViTForImageClassification forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoImageProcessor, ViTForImageClassification
>>> import torch
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("google/vit-base-patch16-224")
>>> model = ViTForImageClassification.from_pretrained("google/vit-base-patch16-224")
>>> inputs = image_processor(image, return_tensors="pt")
>>> with torch.no_grad():
... logits = model(**inputs).logits
>>> # model predicts one of the 1000 ImageNet classes
>>> predicted_label = logits.argmax(-1).item()
>>> print(model.config.id2label[predicted_label])
Egyptian catTFViTModel
class transformers.TFViTModel
< source >( *args **kwargs )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
The bare ViT Model transformer outputting raw hidden-states without any specific head on top.
This model inherits from TFPreTrainedModel. Check the superclass documentation for the generic methods the library implements for all its model (such as downloading or saving, resizing the input embeddings, pruning heads etc.)
This model is also a tf.keras.Model subclass. Use it as a regular TF 2.0 Keras Model and refer to the TF 2.0 documentation for all matter related to general usage and behavior.
TensorFlow models and layers in transformers accept two formats as input:
- having all inputs as keyword arguments (like PyTorch models), or
- having all inputs as a list, tuple or dict in the first positional argument.
The reason the second format is supported is that Keras methods prefer this format when passing inputs to models
and layers. Because of this support, when using methods like model.fit() things should “just work” for you - just
pass your inputs and labels in any format that model.fit() supports! If, however, you want to use the second
format outside of Keras methods like fit() and predict(), such as when creating your own layers or models with
the Keras Functional API, there are three possibilities you can use to gather all the input Tensors in the first
positional argument:
- a single Tensor with
pixel_valuesonly and nothing else:model(pixel_values) - a list of varying length with one or several input Tensors IN THE ORDER given in the docstring:
model([pixel_values, attention_mask])ormodel([pixel_values, attention_mask, token_type_ids]) - a dictionary with one or several input Tensors associated to the input names given in the docstring:
model({"pixel_values": pixel_values, "token_type_ids": token_type_ids})
Note that when creating models and layers with subclassing then you don’t need to worry about any of this, as you can just pass inputs like you would to any other Python function!
call
< source >( pixel_values: TFModelInputType | None = None head_mask: np.ndarray | tf.Tensor | None = None output_attentions: Optional[bool] = None output_hidden_states: Optional[bool] = None interpolate_pos_encoding: Optional[bool] = None return_dict: Optional[bool] = None training: bool = False ) → transformers.modeling_tf_outputs.TFBaseModelOutputWithPooling or tuple(tf.Tensor)
Parameters
- pixel_values (
np.ndarray,tf.Tensor,List[tf.Tensor]`Dict[str, tf.Tensor]orDict[str, np.ndarray]and each example must have the shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See ViTImageProcessor.call() for details. - head_mask (
np.ndarrayortf.Tensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
- output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. This argument can be used only in eager mode, in graph mode the value in the config will be used instead. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. This argument can be used only in eager mode, in graph mode the value in the config will be used instead. - interpolate_pos_encoding (
bool, optional) — Whether to interpolate the pre-trained position encodings. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. This argument can be used in eager mode, in graph mode the value will always be set to True. - training (
bool, optional, defaults to `False“) — Whether or not to use the model in training mode (some modules like dropout modules have different behaviors between training and evaluation).
Returns
transformers.modeling_tf_outputs.TFBaseModelOutputWithPooling or tuple(tf.Tensor)
A transformers.modeling_tf_outputs.TFBaseModelOutputWithPooling or a tuple of tf.Tensor (if
return_dict=False is passed or when config.return_dict=False) comprising various elements depending on the
configuration (ViTConfig) and inputs.
-
last_hidden_state (
tf.Tensorof shape(batch_size, sequence_length, hidden_size)) — Sequence of hidden-states at the output of the last layer of the model. -
pooler_output (
tf.Tensorof shape(batch_size, hidden_size)) — Last layer hidden-state of the first token of the sequence (classification token) further processed by a Linear layer and a Tanh activation function. The Linear layer weights are trained from the next sentence prediction (classification) objective during pretraining.This output is usually not a good summary of the semantic content of the input, you’re often better with averaging or pooling the sequence of hidden-states for the whole input sequence.
-
hidden_states (
tuple(tf.Tensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftf.Tensor(one for the output of the embeddings + one for the output of each layer) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the initial embedding outputs.
-
attentions (
tuple(tf.Tensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftf.Tensor(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The TFViTModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoImageProcessor, TFViTModel
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("google/vit-base-patch16-224-in21k")
>>> model = TFViTModel.from_pretrained("google/vit-base-patch16-224-in21k")
>>> inputs = image_processor(image, return_tensors="tf")
>>> outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_state
>>> list(last_hidden_states.shape)
[1, 197, 768]TFViTForImageClassification
class transformers.TFViTForImageClassification
< source >( *args **kwargs )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
ViT Model transformer with an image classification head on top (a linear layer on top of the final hidden state of the [CLS] token) e.g. for ImageNet.
Note that it’s possible to fine-tune ViT on higher resolution images than the ones it has been trained on, by
setting interpolate_pos_encoding to True in the forward of the model. This will interpolate the pre-trained
position embeddings to the higher resolution.
This model inherits from TFPreTrainedModel. Check the superclass documentation for the generic methods the library implements for all its model (such as downloading or saving, resizing the input embeddings, pruning heads etc.)
This model is also a tf.keras.Model subclass. Use it as a regular TF 2.0 Keras Model and refer to the TF 2.0 documentation for all matter related to general usage and behavior.
TensorFlow models and layers in transformers accept two formats as input:
- having all inputs as keyword arguments (like PyTorch models), or
- having all inputs as a list, tuple or dict in the first positional argument.
The reason the second format is supported is that Keras methods prefer this format when passing inputs to models
and layers. Because of this support, when using methods like model.fit() things should “just work” for you - just
pass your inputs and labels in any format that model.fit() supports! If, however, you want to use the second
format outside of Keras methods like fit() and predict(), such as when creating your own layers or models with
the Keras Functional API, there are three possibilities you can use to gather all the input Tensors in the first
positional argument:
- a single Tensor with
pixel_valuesonly and nothing else:model(pixel_values) - a list of varying length with one or several input Tensors IN THE ORDER given in the docstring:
model([pixel_values, attention_mask])ormodel([pixel_values, attention_mask, token_type_ids]) - a dictionary with one or several input Tensors associated to the input names given in the docstring:
model({"pixel_values": pixel_values, "token_type_ids": token_type_ids})
Note that when creating models and layers with subclassing then you don’t need to worry about any of this, as you can just pass inputs like you would to any other Python function!
call
< source >( pixel_values: TFModelInputType | None = None head_mask: np.ndarray | tf.Tensor | None = None output_attentions: Optional[bool] = None output_hidden_states: Optional[bool] = None interpolate_pos_encoding: Optional[bool] = None return_dict: Optional[bool] = None labels: np.ndarray | tf.Tensor | None = None training: Optional[bool] = False ) → transformers.modeling_tf_outputs.TFSequenceClassifierOutput or tuple(tf.Tensor)
Parameters
- pixel_values (
np.ndarray,tf.Tensor,List[tf.Tensor]`Dict[str, tf.Tensor]orDict[str, np.ndarray]and each example must have the shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using AutoImageProcessor. See ViTImageProcessor.call() for details. - head_mask (
np.ndarrayortf.Tensorof shape(num_heads,)or(num_layers, num_heads), optional) — Mask to nullify selected heads of the self-attention modules. Mask values selected in[0, 1]:- 1 indicates the head is not masked,
- 0 indicates the head is masked.
- output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. This argument can be used only in eager mode, in graph mode the value in the config will be used instead. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. This argument can be used only in eager mode, in graph mode the value in the config will be used instead. - interpolate_pos_encoding (
bool, optional) — Whether to interpolate the pre-trained position encodings. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple. This argument can be used in eager mode, in graph mode the value will always be set to True. - training (
bool, optional, defaults to `False“) — Whether or not to use the model in training mode (some modules like dropout modules have different behaviors between training and evaluation). - labels (
tf.Tensorornp.ndarrayof shape(batch_size,), optional) — Labels for computing the image classification/regression loss. Indices should be in[0, ..., config.num_labels - 1]. Ifconfig.num_labels == 1a regression loss is computed (Mean-Square loss), Ifconfig.num_labels > 1a classification loss is computed (Cross-Entropy).
Returns
transformers.modeling_tf_outputs.TFSequenceClassifierOutput or tuple(tf.Tensor)
A transformers.modeling_tf_outputs.TFSequenceClassifierOutput or a tuple of tf.Tensor (if
return_dict=False is passed or when config.return_dict=False) comprising various elements depending on the
configuration (ViTConfig) and inputs.
-
loss (
tf.Tensorof shape(batch_size, ), optional, returned whenlabelsis provided) — Classification (or regression if config.num_labels==1) loss. -
logits (
tf.Tensorof shape(batch_size, config.num_labels)) — Classification (or regression if config.num_labels==1) scores (before SoftMax). -
hidden_states (
tuple(tf.Tensor), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple oftf.Tensor(one for the output of the embeddings + one for the output of each layer) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the initial embedding outputs.
-
attentions (
tuple(tf.Tensor), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple oftf.Tensor(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The TFViTForImageClassification forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoImageProcessor, TFViTForImageClassification
>>> import tensorflow as tf
>>> from datasets import load_dataset
>>> dataset = load_dataset("huggingface/cats-image")
>>> image = dataset["test"]["image"][0]
>>> image_processor = AutoImageProcessor.from_pretrained("google/vit-base-patch16-224")
>>> model = TFViTForImageClassification.from_pretrained("google/vit-base-patch16-224")
>>> inputs = image_processor(image, return_tensors="tf")
>>> logits = model(**inputs).logits
>>> # model predicts one of the 1000 ImageNet classes
>>> predicted_label = int(tf.math.argmax(logits, axis=-1))
>>> print(model.config.id2label[predicted_label])
Egyptian catFlaxVitModel
class transformers.FlaxViTModel
< source >( config: ViTConfig input_shape = None seed: int = 0 dtype: dtype = <class 'jax.numpy.float32'> _do_init: bool = True **kwargs )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
- dtype (
jax.numpy.dtype, optional, defaults tojax.numpy.float32) — The data type of the computation. Can be one ofjax.numpy.float32,jax.numpy.float16(on GPUs) andjax.numpy.bfloat16(on TPUs).This can be used to enable mixed-precision training or half-precision inference on GPUs or TPUs. If specified all the computation will be performed with the given
dtype.Note that this only specifies the dtype of the computation and does not influence the dtype of model parameters.
If you wish to change the dtype of the model parameters, see to_fp16() and to_bf16().
The bare ViT Model transformer outputting raw hidden-states without any specific head on top.
This model inherits from FlaxPreTrainedModel. Check the superclass documentation for the generic methods the library implements for all its model (such as downloading, saving and converting weights from PyTorch models)
This model is also a Flax Linen flax.linen.Module subclass. Use it as a regular Flax linen Module and refer to the Flax documentation for all matter related to general usage and behavior.
Finally, this model supports inherent JAX features such as:
__call__
< source >( pixel_values params: dict = None dropout_rng: PRNGKey = None train: bool = False output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.modeling_flax_outputs.FlaxBaseModelOutputWithPooling or tuple(torch.FloatTensor)
Returns
transformers.modeling_flax_outputs.FlaxBaseModelOutputWithPooling or tuple(torch.FloatTensor)
A transformers.modeling_flax_outputs.FlaxBaseModelOutputWithPooling or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (<class 'transformers.models.vit.configuration_vit.ViTConfig'>) and inputs.
-
last_hidden_state (
jnp.ndarrayof shape(batch_size, sequence_length, hidden_size)) — Sequence of hidden-states at the output of the last layer of the model. -
pooler_output (
jnp.ndarrayof shape(batch_size, hidden_size)) — Last layer hidden-state of the first token of the sequence (classification token) further processed by a Linear layer and a Tanh activation function. The Linear layer weights are trained from the next sentence prediction (classification) objective during pretraining. -
hidden_states (
tuple(jnp.ndarray), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple ofjnp.ndarray(one for the output of the embeddings + one for the output of each layer) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the initial embedding outputs.
-
attentions (
tuple(jnp.ndarray), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple ofjnp.ndarray(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The FlaxViTPreTrainedModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Examples:
>>> from transformers import AutoImageProcessor, FlaxViTModel
>>> from PIL import Image
>>> import requests
>>> url = "http://images.cocodataset.org/val2017/000000039769.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw)
>>> image_processor = AutoImageProcessor.from_pretrained("google/vit-base-patch16-224-in21k")
>>> model = FlaxViTModel.from_pretrained("google/vit-base-patch16-224-in21k")
>>> inputs = image_processor(images=image, return_tensors="np")
>>> outputs = model(**inputs)
>>> last_hidden_states = outputs.last_hidden_stateFlaxViTForImageClassification
class transformers.FlaxViTForImageClassification
< source >( config: ViTConfig input_shape = None seed: int = 0 dtype: dtype = <class 'jax.numpy.float32'> _do_init: bool = True **kwargs )
Parameters
- config (ViTConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
- dtype (
jax.numpy.dtype, optional, defaults tojax.numpy.float32) — The data type of the computation. Can be one ofjax.numpy.float32,jax.numpy.float16(on GPUs) andjax.numpy.bfloat16(on TPUs).This can be used to enable mixed-precision training or half-precision inference on GPUs or TPUs. If specified all the computation will be performed with the given
dtype.Note that this only specifies the dtype of the computation and does not influence the dtype of model parameters.
If you wish to change the dtype of the model parameters, see to_fp16() and to_bf16().
ViT Model transformer with an image classification head on top (a linear layer on top of the final hidden state of the [CLS] token) e.g. for ImageNet.
This model inherits from FlaxPreTrainedModel. Check the superclass documentation for the generic methods the library implements for all its model (such as downloading, saving and converting weights from PyTorch models)
This model is also a Flax Linen flax.linen.Module subclass. Use it as a regular Flax linen Module and refer to the Flax documentation for all matter related to general usage and behavior.
Finally, this model supports inherent JAX features such as:
__call__
< source >( pixel_values params: dict = None dropout_rng: PRNGKey = None train: bool = False output_attentions: typing.Optional[bool] = None output_hidden_states: typing.Optional[bool] = None return_dict: typing.Optional[bool] = None ) → transformers.modeling_flax_outputs.FlaxSequenceClassifierOutput or tuple(torch.FloatTensor)
Returns
transformers.modeling_flax_outputs.FlaxSequenceClassifierOutput or tuple(torch.FloatTensor)
A transformers.modeling_flax_outputs.FlaxSequenceClassifierOutput or a tuple of
torch.FloatTensor (if return_dict=False is passed or when config.return_dict=False) comprising various
elements depending on the configuration (<class 'transformers.models.vit.configuration_vit.ViTConfig'>) and inputs.
-
logits (
jnp.ndarrayof shape(batch_size, config.num_labels)) — Classification (or regression if config.num_labels==1) scores (before SoftMax). -
hidden_states (
tuple(jnp.ndarray), optional, returned whenoutput_hidden_states=Trueis passed or whenconfig.output_hidden_states=True) — Tuple ofjnp.ndarray(one for the output of the embeddings + one for the output of each layer) of shape(batch_size, sequence_length, hidden_size).Hidden-states of the model at the output of each layer plus the initial embedding outputs.
-
attentions (
tuple(jnp.ndarray), optional, returned whenoutput_attentions=Trueis passed or whenconfig.output_attentions=True) — Tuple ofjnp.ndarray(one for each layer) of shape(batch_size, num_heads, sequence_length, sequence_length).Attentions weights after the attention softmax, used to compute the weighted average in the self-attention heads.
The FlaxViTPreTrainedModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
Example:
>>> from transformers import AutoImageProcessor, FlaxViTForImageClassification
>>> from PIL import Image
>>> import jax
>>> import requests
>>> url = "http://images.cocodataset.org/val2017/000000039769.jpg"
>>> image = Image.open(requests.get(url, stream=True).raw)
>>> image_processor = AutoImageProcessor.from_pretrained("google/vit-base-patch16-224")
>>> model = FlaxViTForImageClassification.from_pretrained("google/vit-base-patch16-224")
>>> inputs = image_processor(images=image, return_tensors="np")
>>> outputs = model(**inputs)
>>> logits = outputs.logits
>>> # model predicts one of the 1000 ImageNet classes
>>> predicted_class_idx = jax.numpy.argmax(logits, axis=-1)
>>> print("Predicted class:", model.config.id2label[predicted_class_idx.item()])