

license: cc-by-4.0
Object Detection — CrossArms and TopCleat (Straight / Tilted)
- This dataset contains real-world images of electric line components (CrossArms, V-CrossArms and TopCleat (Straight / Tilted)) labeled as 'CrossArm_Straight', 'CrossArm_Tilted', 'TopCleat_Straight', 'TopCleat_Tilted', 'V-CrossArm_Straight' and, 'V-CrossArm_Tilted', It represents the initial stage in a broader effort to identify various defects in electric poles using machine learning.
- This module trains and evaluates a YOLOv12 model to detect CrossArms, V-CrossArms and TopCleat defects in field images.
Dataset Details
The dataset is organized into pre-split folders:
../CrossArmsTopCleatDefects_Dataset/
├── train/
│ ├── images/
│ └── labels/
├── valid/
│ ├── images/
│ └── labels/
├── test/
│ ├── images/
│ └── labels/
├── data.yaml
└── object_detection_dataset_bboxes.json
Dataset Description
The dataset comprises 1350 real-world annotated images of electric line components collected across Visakhapatnam, Eluru, and Kakinada districts in Andhra Pradesh, India.
Each image has been annotated in YOLOv12 format with the following labels:
CrossArm\_StraightCrossArm\_TiltedTopCleat\_StraightTopCleat\_TiltedV-CrossArm\_StraightV-CrossArm\_TiltedCurated by: Sampath Balaji & team, at APEPDCL
Funded by: Eastern Power Distribution Company of Andhra Pradesh Limited (APEPDCL)
Language(s) (NLP): Not Applicable
License: CC BY 4.0
Dataset Sources
- GitHub Repository (code): Direct Link
Uses
Direct Use
This dataset is intended to train, evaluate, and benchmark machine learning models for infrastructure monitoring, specifically for identifying CrossArms and TopCleat (Straight / Tilted) in real-world, diverse conditions.
Out-of-Scope Use
- Surveillance or facial recognition tasks
- Biometric identification
- Any use that violates personal rights or local laws
Dataset Structure
- Total images: 1350
- Split:
- Train: 946
- Validation: 202
- Test: 202
- Labels: 'CrossArm_Straight', 'CrossArm_Tilted', 'TopCleat_Straight', 'TopCleat_Tilted', 'V-CrossArm_Straight', 'V-CrossArm_Tilted'
- Format: JPEG images with annotations in YOLOv12 format
- Augmentations: None applied
Dataset Creation
Curation Rationale
This dataset was created to build an ML pipeline for real-time defect detection in utility poles, starting with identifying leaned poles as a foundational task and was further expanded to crossarms and top cleats. The aim is to build an electrical line quality monitoring system to revolutionize maintenance workflows.
Source Data
Data Collection and Processing
Initial data collection and setting up of the protocol by the annotators. Images were collected using mobile cameras by field linemen in Andhra Pradesh. All annotations were manually reviewed and labeled in YOLOv12 format.
Image Capture Protocol
To ensure high-quality and consistent images for pole lean classification, the following guidelines have been established, incorporating the use of the Open Camera app, which leverages the phone’s gyroscope sensor to auto-straighten images and minimize tilted horizons. These guidelines replace previous protocols and aim to reduce bias, improve accuracy, and streamline data collection.
- Capture the Entire Pole: Ensure both the top and bottom of the pole are fully visible in the photo to allow accurate lean assessment.
- Front View Only: Photograph the pole from the front, where the cross arm is clearly visible. Stand directly opposite the pole, facing it.
- No Obstructions: Verify that no objects (e.g., trees, wires, or other structures) block the view of the pole.
- Correct Distance: Stand at a distance equal to the height of the pole. Do not stand closer than ¾ of the pole’s height or farther than 1x its height to maintain consistent perspective.
- Good Lighting: Capture the photo in well-lit conditions, preferably during daylight, to ensure clear visibility of the pole.
- Clean the Lens: Wipe the camera lens with a clean cloth before taking the photo to avoid smudges or blurriness.
- Use Open Camera App: Use the Open Camera app (pre-installed by the IT team) to auto-straighten images using the phone’s gyroscope sensor. Do not use third-party apps or apply filters/enhancements.
- Portrait Orientation Only: Take the photo in portrait (vertical) orientation to ensure consistency and full pole visibility.
- Center the Pole: Position the pole in the center of the frame to maintain focus and alignment.
- Appropriate Framing: Ensure slight space is visible above the top and below the bottom of the pole in the frame for proper context.
Annotations
Annotation process
Manual bounding box annotations were created using image annotation tools and saved in YOLOv12 format. The team worked to maintain consistency, though some labeling errors may persist due to the manual nature of the task.
Who are the annotators?
The APEPDCL project team, under the direction of the team lead.
Personal and Sensitive Information
No personal or sensitive data was intentionally included. However, some images may contain people or faces captured incidentally in public areas, as the data was collected in outdoor settings.
Bias, Risks, and Limitations
- Geographic bias: All data comes from Andhra Pradesh, India — results may not generalize to other regions or environments.
- Scene/perspective bias: Variation in camera angles and distances may affect model training.
- Privacy risk: Images taken in public areas may contain identifiable people.
Recommendations
- Apply image normalization or augmentation techniques to improve generalization.
- Account for perspective and camera angle effects during training and evaluation.
- Use ethically and responsibly, especially in systems that affect public infrastructure.
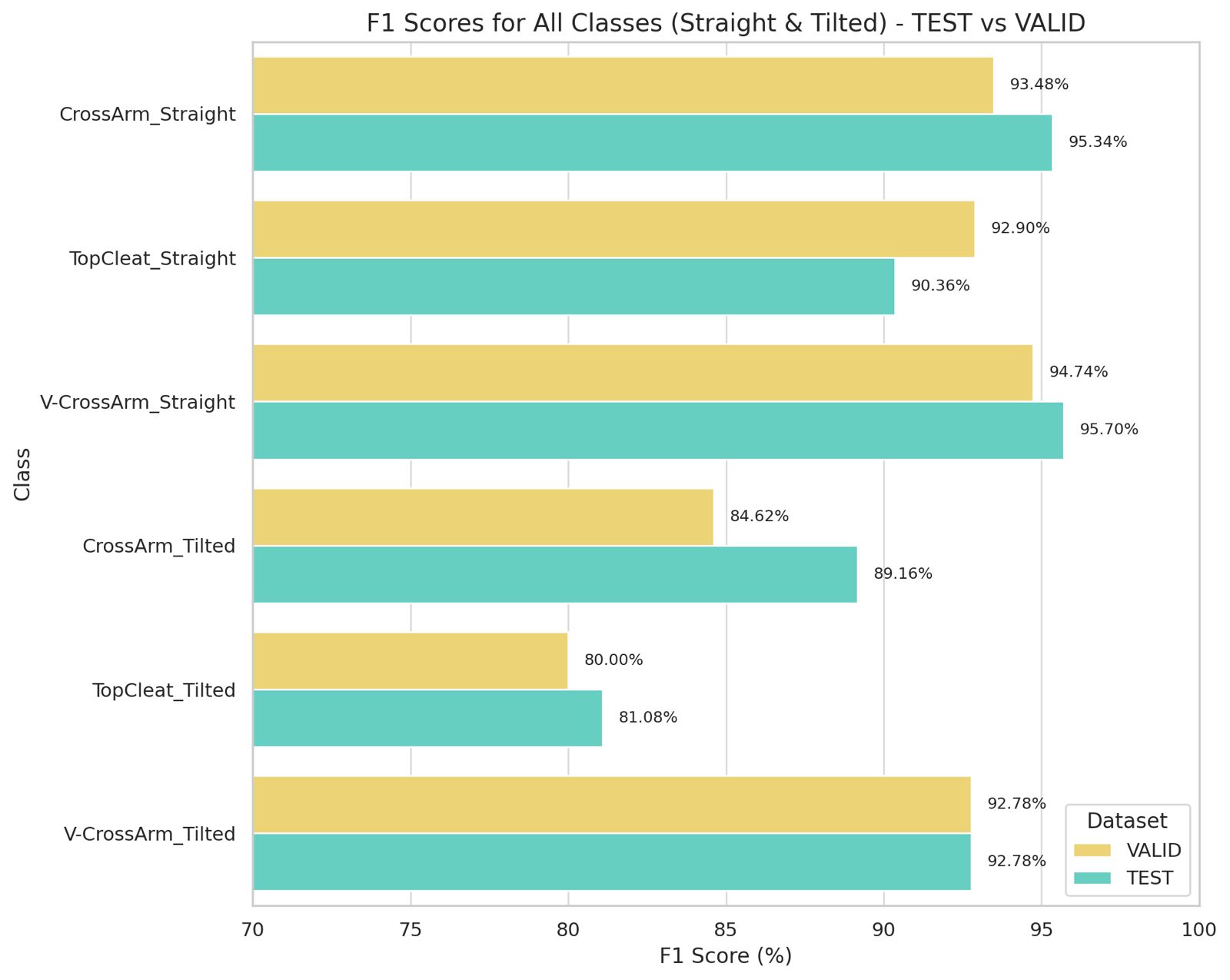
Metrics on dataset:
Validation Set
| Class | Precision | Recall | mAP@0.5 | mAP@0.5:0.95 |
|---|---|---|---|---|
| CrossArm_Straight | 0.917 | 0.927 | 0.895 | 0.775 |
| CrossArm_Tilted | 0.900 | 0.861 | 0.894 | 0.780 |
| TopCleat_Straight | 0.980 | 0.980 | 0.918 | 0.764 |
| TopCleat_Tilted | 0.948 | 0.937 | 0.919 | 0.774 |
| V-CrossArm_Straight | 0.943 | 0.967 | 0.953 | 0.944 |
| V-CrossArm_Tilted | 0.894 | 0.918 | 0.940 | 0.949 |
| Overall | 0.918 | 0.927 | 0.905 | 0.831 |
Speed: 2.8ms/inference, 0.2ms/postprocess per image
Test Set
| Class | Precision | Recall | mAP@0.5 | mAP@0.5:0.95 |
|---|---|---|---|---|
| CrossArm_Straight | 0.917 | 0.957 | 0.953 | 0.811 |
| CrossArm_Tilted | 0.963 | 0.940 | 0.968 | 0.837 |
| TopCleat_Straight | 0.870 | 0.870 | 0.808 | 0.600 |
| TopCleat_Tilted | 0.866 | 0.800 | 0.794 | 0.570 |
| V-CrossArm_Straight | 0.950 | 0.983 | 0.978 | 0.952 |
| V-CrossArm_Tilted | 0.894 | 0.917 | 0.955 | 0.914 |
| Overall | 0.910 | 0.911 | 0.909 | 0.781 |
Speed: 2.7ms/inference, 0.2ms/postprocess per image
Sample predictions

More Information
Follow-up datasets in this series will include other electrical line and pole defects as part of APEPDCL's Line Quality monitoring project.