

license: apache-2.0
base_model: runwayml/stable-diffusion-v1-5
tags:
- art
- t2i-adapter
- controlnet
- stable-diffusion
- image-to-image
T2I Adapter - Zoedepth
T2I Adapter is a network providing additional conditioning to stable diffusion. Each t2i checkpoint takes a different type of conditioning as input and is used with a specific base stable diffusion checkpoint.
This checkpoint provides conditioning on zoedepth depth estimation for the stable diffusion 1.5 checkpoint.
Model Details
Developed by: T2I-Adapter: Learning Adapters to Dig out More Controllable Ability for Text-to-Image Diffusion Models
Model type: Diffusion-based text-to-image generation model
Language(s): English
License: Apache 2.0
Resources for more information: GitHub Repository, Paper.
Cite as:
@misc{ title={T2I-Adapter: Learning Adapters to Dig out More Controllable Ability for Text-to-Image Diffusion Models}, author={Chong Mou, Xintao Wang, Liangbin Xie, Yanze Wu, Jian Zhang, Zhongang Qi, Ying Shan, Xiaohu Qie}, year={2023}, eprint={2302.08453}, archivePrefix={arXiv}, primaryClass={cs.CV} }
Checkpoints
| Model Name | Control Image Overview | Control Image Example | Generated Image Example |
|---|---|---|---|
| TencentARC/t2iadapter_color_sd14v1 Trained with spatial color palette |
A image with 8x8 color palette. | 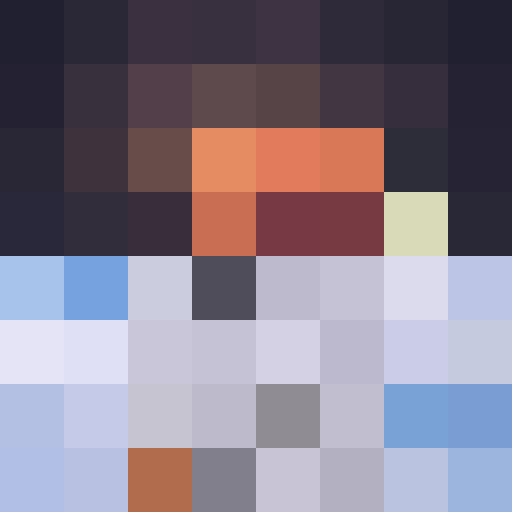 |
 |
| TencentARC/t2iadapter_canny_sd14v1 Trained with canny edge detection |
A monochrome image with white edges on a black background. |  |
 |
| TencentARC/t2iadapter_sketch_sd14v1 Trained with PidiNet edge detection |
A hand-drawn monochrome image with white outlines on a black background. | 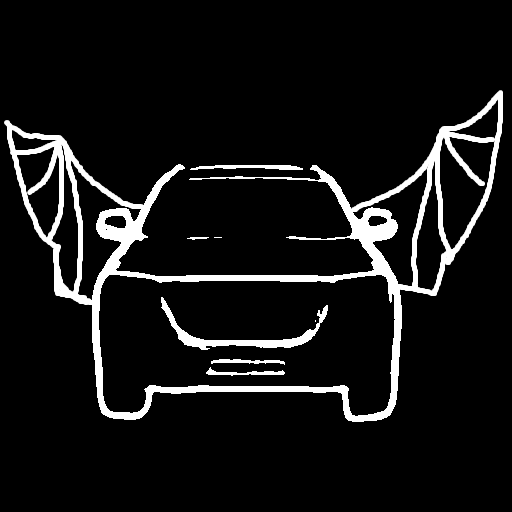 |
 |
| TencentARC/t2iadapter_depth_sd14v1 Trained with Midas depth estimation |
A grayscale image with black representing deep areas and white representing shallow areas. |  |
 |
| TencentARC/t2iadapter_openpose_sd14v1 Trained with OpenPose bone image |
A OpenPose bone image. | 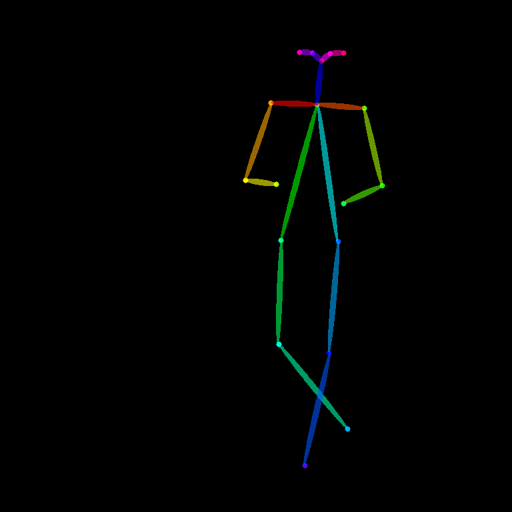 |
 |
| TencentARC/t2iadapter_keypose_sd14v1 Trained with mmpose skeleton image |
A mmpose skeleton image. | 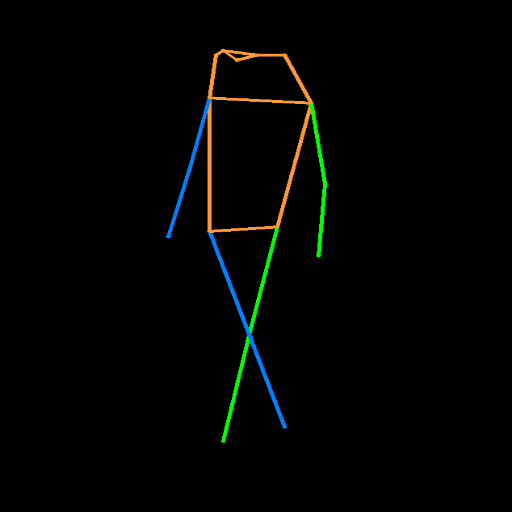 |
 |
| TencentARC/t2iadapter_seg_sd14v1 Trained with semantic segmentation |
An custom segmentation protocol image. |  |
 |
| TencentARC/t2iadapter_canny_sd15v2 | |||
| TencentARC/t2iadapter_depth_sd15v2 | |||
| TencentARC/t2iadapter_sketch_sd15v2 | |||
| TencentARC/t2iadapter_zoedepth_sd15v1 |
Example
- Dependencies
pip install diffusers transformers matplotlib
- Run code:
from PIL import Image
import torch
import numpy as np
import matplotlib
from diffusers import T2IAdapter, StableDiffusionAdapterPipeline
def colorize(value, vmin=None, vmax=None, cmap='gray_r', invalid_val=-99, invalid_mask=None, background_color=(128, 128, 128, 255), gamma_corrected=False, value_transform=None):
"""Converts a depth map to a color image.
Args:
value (torch.Tensor, numpy.ndarry): Input depth map. Shape: (H, W) or (1, H, W) or (1, 1, H, W). All singular dimensions are squeezed
vmin (float, optional): vmin-valued entries are mapped to start color of cmap. If None, value.min() is used. Defaults to None.
vmax (float, optional): vmax-valued entries are mapped to end color of cmap. If None, value.max() is used. Defaults to None.
cmap (str, optional): matplotlib colormap to use. Defaults to 'magma_r'.
invalid_val (int, optional): Specifies value of invalid pixels that should be colored as 'background_color'. Defaults to -99.
invalid_mask (numpy.ndarray, optional): Boolean mask for invalid regions. Defaults to None.
background_color (tuple[int], optional): 4-tuple RGB color to give to invalid pixels. Defaults to (128, 128, 128, 255).
gamma_corrected (bool, optional): Apply gamma correction to colored image. Defaults to False.
value_transform (Callable, optional): Apply transform function to valid pixels before coloring. Defaults to None.
Returns:
numpy.ndarray, dtype - uint8: Colored depth map. Shape: (H, W, 4)
"""
if isinstance(value, torch.Tensor):
value = value.detach().cpu().numpy()
value = value.squeeze()
if invalid_mask is None:
invalid_mask = value == invalid_val
mask = np.logical_not(invalid_mask)
# normalize
vmin = np.percentile(value[mask],2) if vmin is None else vmin
vmax = np.percentile(value[mask],85) if vmax is None else vmax
if vmin != vmax:
value = (value - vmin) / (vmax - vmin) # vmin..vmax
else:
# Avoid 0-division
value = value * 0.
# squeeze last dim if it exists
# grey out the invalid values
value[invalid_mask] = np.nan
cmapper = matplotlib.cm.get_cmap(cmap)
if value_transform:
value = value_transform(value)
# value = value / value.max()
value = cmapper(value, bytes=True) # (nxmx4)
img = value[...]
img[invalid_mask] = background_color
if gamma_corrected:
img = img / 255
img = np.power(img, 2.2)
img = img * 255
img = img.astype(np.uint8)
return img
model = torch.hub.load("isl-org/ZoeDepth", "ZoeD_N", pretrained=True)
img = Image.open('./images/zoedepth_in.png')
out = model.infer_pil(img)
zoedepth_image = Image.fromarray(colorize(out)).convert('RGB')
zoedepth_image.save('images/zoedepth.png')
adapter = T2IAdapter.from_pretrained("TencentARC/t2iadapter_zoedepth_sd15v1", torch_dtype=torch.float16)
pipe = StableDiffusionAdapterPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", adapter=adapter, safety_checker=None, torch_dtype=torch.float16, variant="fp16"
)
pipe.to('cuda')
zoedepth_image_out = pipe(prompt="motorcycle", image=zoedepth_image).images[0]
zoedepth_image_out.save('images/zoedepth_out.png')


