Spaces:
Sleeping

A newer version of the Streamlit SDK is available:
1.41.1
license: apache-2.0
tags:
- object-detection
- vision
- detic
datasets:
- coco
- lvis
widget:
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/savanna.jpg
example_title: Savanna
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/football-match.jpg
example_title: Football Match
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/airport.jpg
example_title: Airport
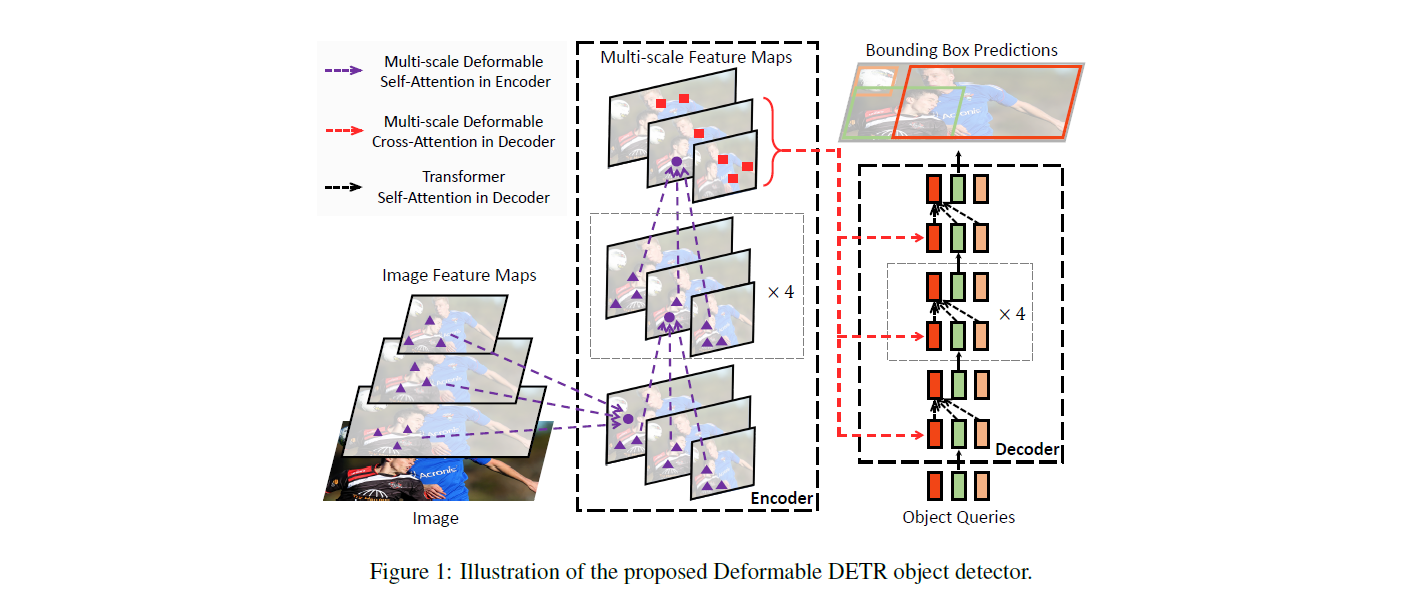
Deformable DETR model trained using the Detic method on LVIS
Deformable DEtection TRansformer (DETR), trained on LVIS (including 1203 classes). It was introduced in the paper Detecting Twenty-thousand Classes using Image-level Supervision by Zhou et al. and first released in this repository.
This model corresponds to the "Detic_DeformDETR_R50_4x" checkpoint released in the original repository.
Disclaimer: The team releasing Detic did not write a model card for this model so this model card has been written by the Hugging Face team.
Model description
The DETR model is an encoder-decoder transformer with a convolutional backbone. Two heads are added on top of the decoder outputs in order to perform object detection: a linear layer for the class labels and a MLP (multi-layer perceptron) for the bounding boxes. The model uses so-called object queries to detect objects in an image. Each object query looks for a particular object in the image. For COCO, the number of object queries is set to 100.
The model is trained using a "bipartite matching loss": one compares the predicted classes + bounding boxes of each of the N = 100 object queries to the ground truth annotations, padded up to the same length N (so if an image only contains 4 objects, 96 annotations will just have a "no object" as class and "no bounding box" as bounding box). The Hungarian matching algorithm is used to create an optimal one-to-one mapping between each of the N queries and each of the N annotations. Next, standard cross-entropy (for the classes) and a linear combination of the L1 and generalized IoU loss (for the bounding boxes) are used to optimize the parameters of the model.
Intended uses & limitations
You can use the raw model for object detection. See the model hub to look for all available Deformable DETR models.
How to use
Here is how to use this model:
from transformers import AutoImageProcessor, DeformableDetrForObjectDetection
import torch
from PIL import Image
import requests
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
image = Image.open(requests.get(url, stream=True).raw)
processor = AutoImageProcessor.from_pretrained("facebook/deformable-detr-detic")
model = DeformableDetrForObjectDetection.from_pretrained("facebook/deformable-detr-detic")
inputs = processor(images=image, return_tensors="pt")
outputs = model(**inputs)
# convert outputs (bounding boxes and class logits) to COCO API
# let's only keep detections with score > 0.7
target_sizes = torch.tensor([image.size[::-1]])
results = processor.post_process_object_detection(outputs, target_sizes=target_sizes, threshold=0.7)[0]
for score, label, box in zip(results["scores"], results["labels"], results["boxes"]):
box = [round(i, 2) for i in box.tolist()]
print(
f"Detected {model.config.id2label[label.item()]} with confidence "
f"{round(score.item(), 3)} at location {box}"
)
Evaluation results
This model achieves 32.5 box mAP and 26.2 mAP (rare classes) on LVIS.
BibTeX entry and citation info
@misc{https://doi.org/10.48550/arxiv.2010.04159,
doi = {10.48550/ARXIV.2010.04159},
url = {https://arxiv.org/abs/2010.04159},
author = {Zhu, Xizhou and Su, Weijie and Lu, Lewei and Li, Bin and Wang, Xiaogang and Dai, Jifeng},
keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences},
title = {Deformable DETR: Deformable Transformers for End-to-End Object Detection},
publisher = {arXiv},
year = {2020},
copyright = {arXiv.org perpetual, non-exclusive license}
}