Spaces:
Runtime error

Runtime error
add files
Browse filesThis view is limited to 50 files because it contains too many changes.
See raw diff
- LICENSE.md +674 -0
- cfg/baseline/r50-csp.yaml +49 -0
- cfg/baseline/x50-csp.yaml +49 -0
- cfg/baseline/yolor-csp-x.yaml +52 -0
- cfg/baseline/yolor-csp.yaml +52 -0
- cfg/baseline/yolor-d6.yaml +63 -0
- cfg/baseline/yolor-e6.yaml +63 -0
- cfg/baseline/yolor-p6.yaml +63 -0
- cfg/baseline/yolor-w6.yaml +63 -0
- cfg/baseline/yolov3-spp.yaml +51 -0
- cfg/baseline/yolov3.yaml +51 -0
- cfg/baseline/yolov4-csp.yaml +52 -0
- cfg/deploy/yolov7-d6.yaml +202 -0
- cfg/deploy/yolov7-e6.yaml +180 -0
- cfg/deploy/yolov7-e6e.yaml +301 -0
- cfg/deploy/yolov7-tiny-silu.yaml +112 -0
- cfg/deploy/yolov7-w6.yaml +158 -0
- cfg/deploy/yolov7.yaml +140 -0
- cfg/deploy/yolov7x.yaml +156 -0
- cfg/training/yolov7.yaml +140 -0
- cfg/training/yolov7d6.yaml +207 -0
- cfg/training/yolov7e6.yaml +185 -0
- cfg/training/yolov7e6e.yaml +306 -0
- cfg/training/yolov7w6.yaml +163 -0
- cfg/training/yolov7x.yaml +156 -0
- data/coco.yaml +23 -0
- data/hyp.scratch.p5.yaml +29 -0
- data/hyp.scratch.p6.yaml +29 -0
- data/hyp.scratch.tiny.yaml +29 -0
- detect.py +183 -0
- figure/performance.png +0 -0
- hubconf.py +97 -0
- inference/images/horses.jpg +0 -0
- models/__init__.py +1 -0
- models/common.py +2019 -0
- models/experimental.py +106 -0
- models/export.py +98 -0
- models/yolo.py +550 -0
- scripts/get_coco.sh +22 -0
- test.py +347 -0
- train.py +691 -0
- utils/__init__.py +1 -0
- utils/activations.py +72 -0
- utils/autoanchor.py +160 -0
- utils/aws/__init__.py +1 -0
- utils/aws/mime.sh +26 -0
- utils/aws/resume.py +37 -0
- utils/aws/userdata.sh +27 -0
- utils/datasets.py +1320 -0
- utils/general.py +790 -0
LICENSE.md
ADDED
|
@@ -0,0 +1,674 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
GNU GENERAL PUBLIC LICENSE
|
| 2 |
+
Version 3, 29 June 2007
|
| 3 |
+
|
| 4 |
+
Copyright (C) 2007 Free Software Foundation, Inc. <https://fsf.org/>
|
| 5 |
+
Everyone is permitted to copy and distribute verbatim copies
|
| 6 |
+
of this license document, but changing it is not allowed.
|
| 7 |
+
|
| 8 |
+
Preamble
|
| 9 |
+
|
| 10 |
+
The GNU General Public License is a free, copyleft license for
|
| 11 |
+
software and other kinds of works.
|
| 12 |
+
|
| 13 |
+
The licenses for most software and other practical works are designed
|
| 14 |
+
to take away your freedom to share and change the works. By contrast,
|
| 15 |
+
the GNU General Public License is intended to guarantee your freedom to
|
| 16 |
+
share and change all versions of a program--to make sure it remains free
|
| 17 |
+
software for all its users. We, the Free Software Foundation, use the
|
| 18 |
+
GNU General Public License for most of our software; it applies also to
|
| 19 |
+
any other work released this way by its authors. You can apply it to
|
| 20 |
+
your programs, too.
|
| 21 |
+
|
| 22 |
+
When we speak of free software, we are referring to freedom, not
|
| 23 |
+
price. Our General Public Licenses are designed to make sure that you
|
| 24 |
+
have the freedom to distribute copies of free software (and charge for
|
| 25 |
+
them if you wish), that you receive source code or can get it if you
|
| 26 |
+
want it, that you can change the software or use pieces of it in new
|
| 27 |
+
free programs, and that you know you can do these things.
|
| 28 |
+
|
| 29 |
+
To protect your rights, we need to prevent others from denying you
|
| 30 |
+
these rights or asking you to surrender the rights. Therefore, you have
|
| 31 |
+
certain responsibilities if you distribute copies of the software, or if
|
| 32 |
+
you modify it: responsibilities to respect the freedom of others.
|
| 33 |
+
|
| 34 |
+
For example, if you distribute copies of such a program, whether
|
| 35 |
+
gratis or for a fee, you must pass on to the recipients the same
|
| 36 |
+
freedoms that you received. You must make sure that they, too, receive
|
| 37 |
+
or can get the source code. And you must show them these terms so they
|
| 38 |
+
know their rights.
|
| 39 |
+
|
| 40 |
+
Developers that use the GNU GPL protect your rights with two steps:
|
| 41 |
+
(1) assert copyright on the software, and (2) offer you this License
|
| 42 |
+
giving you legal permission to copy, distribute and/or modify it.
|
| 43 |
+
|
| 44 |
+
For the developers' and authors' protection, the GPL clearly explains
|
| 45 |
+
that there is no warranty for this free software. For both users' and
|
| 46 |
+
authors' sake, the GPL requires that modified versions be marked as
|
| 47 |
+
changed, so that their problems will not be attributed erroneously to
|
| 48 |
+
authors of previous versions.
|
| 49 |
+
|
| 50 |
+
Some devices are designed to deny users access to install or run
|
| 51 |
+
modified versions of the software inside them, although the manufacturer
|
| 52 |
+
can do so. This is fundamentally incompatible with the aim of
|
| 53 |
+
protecting users' freedom to change the software. The systematic
|
| 54 |
+
pattern of such abuse occurs in the area of products for individuals to
|
| 55 |
+
use, which is precisely where it is most unacceptable. Therefore, we
|
| 56 |
+
have designed this version of the GPL to prohibit the practice for those
|
| 57 |
+
products. If such problems arise substantially in other domains, we
|
| 58 |
+
stand ready to extend this provision to those domains in future versions
|
| 59 |
+
of the GPL, as needed to protect the freedom of users.
|
| 60 |
+
|
| 61 |
+
Finally, every program is threatened constantly by software patents.
|
| 62 |
+
States should not allow patents to restrict development and use of
|
| 63 |
+
software on general-purpose computers, but in those that do, we wish to
|
| 64 |
+
avoid the special danger that patents applied to a free program could
|
| 65 |
+
make it effectively proprietary. To prevent this, the GPL assures that
|
| 66 |
+
patents cannot be used to render the program non-free.
|
| 67 |
+
|
| 68 |
+
The precise terms and conditions for copying, distribution and
|
| 69 |
+
modification follow.
|
| 70 |
+
|
| 71 |
+
TERMS AND CONDITIONS
|
| 72 |
+
|
| 73 |
+
0. Definitions.
|
| 74 |
+
|
| 75 |
+
"This License" refers to version 3 of the GNU General Public License.
|
| 76 |
+
|
| 77 |
+
"Copyright" also means copyright-like laws that apply to other kinds of
|
| 78 |
+
works, such as semiconductor masks.
|
| 79 |
+
|
| 80 |
+
"The Program" refers to any copyrightable work licensed under this
|
| 81 |
+
License. Each licensee is addressed as "you". "Licensees" and
|
| 82 |
+
"recipients" may be individuals or organizations.
|
| 83 |
+
|
| 84 |
+
To "modify" a work means to copy from or adapt all or part of the work
|
| 85 |
+
in a fashion requiring copyright permission, other than the making of an
|
| 86 |
+
exact copy. The resulting work is called a "modified version" of the
|
| 87 |
+
earlier work or a work "based on" the earlier work.
|
| 88 |
+
|
| 89 |
+
A "covered work" means either the unmodified Program or a work based
|
| 90 |
+
on the Program.
|
| 91 |
+
|
| 92 |
+
To "propagate" a work means to do anything with it that, without
|
| 93 |
+
permission, would make you directly or secondarily liable for
|
| 94 |
+
infringement under applicable copyright law, except executing it on a
|
| 95 |
+
computer or modifying a private copy. Propagation includes copying,
|
| 96 |
+
distribution (with or without modification), making available to the
|
| 97 |
+
public, and in some countries other activities as well.
|
| 98 |
+
|
| 99 |
+
To "convey" a work means any kind of propagation that enables other
|
| 100 |
+
parties to make or receive copies. Mere interaction with a user through
|
| 101 |
+
a computer network, with no transfer of a copy, is not conveying.
|
| 102 |
+
|
| 103 |
+
An interactive user interface displays "Appropriate Legal Notices"
|
| 104 |
+
to the extent that it includes a convenient and prominently visible
|
| 105 |
+
feature that (1) displays an appropriate copyright notice, and (2)
|
| 106 |
+
tells the user that there is no warranty for the work (except to the
|
| 107 |
+
extent that warranties are provided), that licensees may convey the
|
| 108 |
+
work under this License, and how to view a copy of this License. If
|
| 109 |
+
the interface presents a list of user commands or options, such as a
|
| 110 |
+
menu, a prominent item in the list meets this criterion.
|
| 111 |
+
|
| 112 |
+
1. Source Code.
|
| 113 |
+
|
| 114 |
+
The "source code" for a work means the preferred form of the work
|
| 115 |
+
for making modifications to it. "Object code" means any non-source
|
| 116 |
+
form of a work.
|
| 117 |
+
|
| 118 |
+
A "Standard Interface" means an interface that either is an official
|
| 119 |
+
standard defined by a recognized standards body, or, in the case of
|
| 120 |
+
interfaces specified for a particular programming language, one that
|
| 121 |
+
is widely used among developers working in that language.
|
| 122 |
+
|
| 123 |
+
The "System Libraries" of an executable work include anything, other
|
| 124 |
+
than the work as a whole, that (a) is included in the normal form of
|
| 125 |
+
packaging a Major Component, but which is not part of that Major
|
| 126 |
+
Component, and (b) serves only to enable use of the work with that
|
| 127 |
+
Major Component, or to implement a Standard Interface for which an
|
| 128 |
+
implementation is available to the public in source code form. A
|
| 129 |
+
"Major Component", in this context, means a major essential component
|
| 130 |
+
(kernel, window system, and so on) of the specific operating system
|
| 131 |
+
(if any) on which the executable work runs, or a compiler used to
|
| 132 |
+
produce the work, or an object code interpreter used to run it.
|
| 133 |
+
|
| 134 |
+
The "Corresponding Source" for a work in object code form means all
|
| 135 |
+
the source code needed to generate, install, and (for an executable
|
| 136 |
+
work) run the object code and to modify the work, including scripts to
|
| 137 |
+
control those activities. However, it does not include the work's
|
| 138 |
+
System Libraries, or general-purpose tools or generally available free
|
| 139 |
+
programs which are used unmodified in performing those activities but
|
| 140 |
+
which are not part of the work. For example, Corresponding Source
|
| 141 |
+
includes interface definition files associated with source files for
|
| 142 |
+
the work, and the source code for shared libraries and dynamically
|
| 143 |
+
linked subprograms that the work is specifically designed to require,
|
| 144 |
+
such as by intimate data communication or control flow between those
|
| 145 |
+
subprograms and other parts of the work.
|
| 146 |
+
|
| 147 |
+
The Corresponding Source need not include anything that users
|
| 148 |
+
can regenerate automatically from other parts of the Corresponding
|
| 149 |
+
Source.
|
| 150 |
+
|
| 151 |
+
The Corresponding Source for a work in source code form is that
|
| 152 |
+
same work.
|
| 153 |
+
|
| 154 |
+
2. Basic Permissions.
|
| 155 |
+
|
| 156 |
+
All rights granted under this License are granted for the term of
|
| 157 |
+
copyright on the Program, and are irrevocable provided the stated
|
| 158 |
+
conditions are met. This License explicitly affirms your unlimited
|
| 159 |
+
permission to run the unmodified Program. The output from running a
|
| 160 |
+
covered work is covered by this License only if the output, given its
|
| 161 |
+
content, constitutes a covered work. This License acknowledges your
|
| 162 |
+
rights of fair use or other equivalent, as provided by copyright law.
|
| 163 |
+
|
| 164 |
+
You may make, run and propagate covered works that you do not
|
| 165 |
+
convey, without conditions so long as your license otherwise remains
|
| 166 |
+
in force. You may convey covered works to others for the sole purpose
|
| 167 |
+
of having them make modifications exclusively for you, or provide you
|
| 168 |
+
with facilities for running those works, provided that you comply with
|
| 169 |
+
the terms of this License in conveying all material for which you do
|
| 170 |
+
not control copyright. Those thus making or running the covered works
|
| 171 |
+
for you must do so exclusively on your behalf, under your direction
|
| 172 |
+
and control, on terms that prohibit them from making any copies of
|
| 173 |
+
your copyrighted material outside their relationship with you.
|
| 174 |
+
|
| 175 |
+
Conveying under any other circumstances is permitted solely under
|
| 176 |
+
the conditions stated below. Sublicensing is not allowed; section 10
|
| 177 |
+
makes it unnecessary.
|
| 178 |
+
|
| 179 |
+
3. Protecting Users' Legal Rights From Anti-Circumvention Law.
|
| 180 |
+
|
| 181 |
+
No covered work shall be deemed part of an effective technological
|
| 182 |
+
measure under any applicable law fulfilling obligations under article
|
| 183 |
+
11 of the WIPO copyright treaty adopted on 20 December 1996, or
|
| 184 |
+
similar laws prohibiting or restricting circumvention of such
|
| 185 |
+
measures.
|
| 186 |
+
|
| 187 |
+
When you convey a covered work, you waive any legal power to forbid
|
| 188 |
+
circumvention of technological measures to the extent such circumvention
|
| 189 |
+
is effected by exercising rights under this License with respect to
|
| 190 |
+
the covered work, and you disclaim any intention to limit operation or
|
| 191 |
+
modification of the work as a means of enforcing, against the work's
|
| 192 |
+
users, your or third parties' legal rights to forbid circumvention of
|
| 193 |
+
technological measures.
|
| 194 |
+
|
| 195 |
+
4. Conveying Verbatim Copies.
|
| 196 |
+
|
| 197 |
+
You may convey verbatim copies of the Program's source code as you
|
| 198 |
+
receive it, in any medium, provided that you conspicuously and
|
| 199 |
+
appropriately publish on each copy an appropriate copyright notice;
|
| 200 |
+
keep intact all notices stating that this License and any
|
| 201 |
+
non-permissive terms added in accord with section 7 apply to the code;
|
| 202 |
+
keep intact all notices of the absence of any warranty; and give all
|
| 203 |
+
recipients a copy of this License along with the Program.
|
| 204 |
+
|
| 205 |
+
You may charge any price or no price for each copy that you convey,
|
| 206 |
+
and you may offer support or warranty protection for a fee.
|
| 207 |
+
|
| 208 |
+
5. Conveying Modified Source Versions.
|
| 209 |
+
|
| 210 |
+
You may convey a work based on the Program, or the modifications to
|
| 211 |
+
produce it from the Program, in the form of source code under the
|
| 212 |
+
terms of section 4, provided that you also meet all of these conditions:
|
| 213 |
+
|
| 214 |
+
a) The work must carry prominent notices stating that you modified
|
| 215 |
+
it, and giving a relevant date.
|
| 216 |
+
|
| 217 |
+
b) The work must carry prominent notices stating that it is
|
| 218 |
+
released under this License and any conditions added under section
|
| 219 |
+
7. This requirement modifies the requirement in section 4 to
|
| 220 |
+
"keep intact all notices".
|
| 221 |
+
|
| 222 |
+
c) You must license the entire work, as a whole, under this
|
| 223 |
+
License to anyone who comes into possession of a copy. This
|
| 224 |
+
License will therefore apply, along with any applicable section 7
|
| 225 |
+
additional terms, to the whole of the work, and all its parts,
|
| 226 |
+
regardless of how they are packaged. This License gives no
|
| 227 |
+
permission to license the work in any other way, but it does not
|
| 228 |
+
invalidate such permission if you have separately received it.
|
| 229 |
+
|
| 230 |
+
d) If the work has interactive user interfaces, each must display
|
| 231 |
+
Appropriate Legal Notices; however, if the Program has interactive
|
| 232 |
+
interfaces that do not display Appropriate Legal Notices, your
|
| 233 |
+
work need not make them do so.
|
| 234 |
+
|
| 235 |
+
A compilation of a covered work with other separate and independent
|
| 236 |
+
works, which are not by their nature extensions of the covered work,
|
| 237 |
+
and which are not combined with it such as to form a larger program,
|
| 238 |
+
in or on a volume of a storage or distribution medium, is called an
|
| 239 |
+
"aggregate" if the compilation and its resulting copyright are not
|
| 240 |
+
used to limit the access or legal rights of the compilation's users
|
| 241 |
+
beyond what the individual works permit. Inclusion of a covered work
|
| 242 |
+
in an aggregate does not cause this License to apply to the other
|
| 243 |
+
parts of the aggregate.
|
| 244 |
+
|
| 245 |
+
6. Conveying Non-Source Forms.
|
| 246 |
+
|
| 247 |
+
You may convey a covered work in object code form under the terms
|
| 248 |
+
of sections 4 and 5, provided that you also convey the
|
| 249 |
+
machine-readable Corresponding Source under the terms of this License,
|
| 250 |
+
in one of these ways:
|
| 251 |
+
|
| 252 |
+
a) Convey the object code in, or embodied in, a physical product
|
| 253 |
+
(including a physical distribution medium), accompanied by the
|
| 254 |
+
Corresponding Source fixed on a durable physical medium
|
| 255 |
+
customarily used for software interchange.
|
| 256 |
+
|
| 257 |
+
b) Convey the object code in, or embodied in, a physical product
|
| 258 |
+
(including a physical distribution medium), accompanied by a
|
| 259 |
+
written offer, valid for at least three years and valid for as
|
| 260 |
+
long as you offer spare parts or customer support for that product
|
| 261 |
+
model, to give anyone who possesses the object code either (1) a
|
| 262 |
+
copy of the Corresponding Source for all the software in the
|
| 263 |
+
product that is covered by this License, on a durable physical
|
| 264 |
+
medium customarily used for software interchange, for a price no
|
| 265 |
+
more than your reasonable cost of physically performing this
|
| 266 |
+
conveying of source, or (2) access to copy the
|
| 267 |
+
Corresponding Source from a network server at no charge.
|
| 268 |
+
|
| 269 |
+
c) Convey individual copies of the object code with a copy of the
|
| 270 |
+
written offer to provide the Corresponding Source. This
|
| 271 |
+
alternative is allowed only occasionally and noncommercially, and
|
| 272 |
+
only if you received the object code with such an offer, in accord
|
| 273 |
+
with subsection 6b.
|
| 274 |
+
|
| 275 |
+
d) Convey the object code by offering access from a designated
|
| 276 |
+
place (gratis or for a charge), and offer equivalent access to the
|
| 277 |
+
Corresponding Source in the same way through the same place at no
|
| 278 |
+
further charge. You need not require recipients to copy the
|
| 279 |
+
Corresponding Source along with the object code. If the place to
|
| 280 |
+
copy the object code is a network server, the Corresponding Source
|
| 281 |
+
may be on a different server (operated by you or a third party)
|
| 282 |
+
that supports equivalent copying facilities, provided you maintain
|
| 283 |
+
clear directions next to the object code saying where to find the
|
| 284 |
+
Corresponding Source. Regardless of what server hosts the
|
| 285 |
+
Corresponding Source, you remain obligated to ensure that it is
|
| 286 |
+
available for as long as needed to satisfy these requirements.
|
| 287 |
+
|
| 288 |
+
e) Convey the object code using peer-to-peer transmission, provided
|
| 289 |
+
you inform other peers where the object code and Corresponding
|
| 290 |
+
Source of the work are being offered to the general public at no
|
| 291 |
+
charge under subsection 6d.
|
| 292 |
+
|
| 293 |
+
A separable portion of the object code, whose source code is excluded
|
| 294 |
+
from the Corresponding Source as a System Library, need not be
|
| 295 |
+
included in conveying the object code work.
|
| 296 |
+
|
| 297 |
+
A "User Product" is either (1) a "consumer product", which means any
|
| 298 |
+
tangible personal property which is normally used for personal, family,
|
| 299 |
+
or household purposes, or (2) anything designed or sold for incorporation
|
| 300 |
+
into a dwelling. In determining whether a product is a consumer product,
|
| 301 |
+
doubtful cases shall be resolved in favor of coverage. For a particular
|
| 302 |
+
product received by a particular user, "normally used" refers to a
|
| 303 |
+
typical or common use of that class of product, regardless of the status
|
| 304 |
+
of the particular user or of the way in which the particular user
|
| 305 |
+
actually uses, or expects or is expected to use, the product. A product
|
| 306 |
+
is a consumer product regardless of whether the product has substantial
|
| 307 |
+
commercial, industrial or non-consumer uses, unless such uses represent
|
| 308 |
+
the only significant mode of use of the product.
|
| 309 |
+
|
| 310 |
+
"Installation Information" for a User Product means any methods,
|
| 311 |
+
procedures, authorization keys, or other information required to install
|
| 312 |
+
and execute modified versions of a covered work in that User Product from
|
| 313 |
+
a modified version of its Corresponding Source. The information must
|
| 314 |
+
suffice to ensure that the continued functioning of the modified object
|
| 315 |
+
code is in no case prevented or interfered with solely because
|
| 316 |
+
modification has been made.
|
| 317 |
+
|
| 318 |
+
If you convey an object code work under this section in, or with, or
|
| 319 |
+
specifically for use in, a User Product, and the conveying occurs as
|
| 320 |
+
part of a transaction in which the right of possession and use of the
|
| 321 |
+
User Product is transferred to the recipient in perpetuity or for a
|
| 322 |
+
fixed term (regardless of how the transaction is characterized), the
|
| 323 |
+
Corresponding Source conveyed under this section must be accompanied
|
| 324 |
+
by the Installation Information. But this requirement does not apply
|
| 325 |
+
if neither you nor any third party retains the ability to install
|
| 326 |
+
modified object code on the User Product (for example, the work has
|
| 327 |
+
been installed in ROM).
|
| 328 |
+
|
| 329 |
+
The requirement to provide Installation Information does not include a
|
| 330 |
+
requirement to continue to provide support service, warranty, or updates
|
| 331 |
+
for a work that has been modified or installed by the recipient, or for
|
| 332 |
+
the User Product in which it has been modified or installed. Access to a
|
| 333 |
+
network may be denied when the modification itself materially and
|
| 334 |
+
adversely affects the operation of the network or violates the rules and
|
| 335 |
+
protocols for communication across the network.
|
| 336 |
+
|
| 337 |
+
Corresponding Source conveyed, and Installation Information provided,
|
| 338 |
+
in accord with this section must be in a format that is publicly
|
| 339 |
+
documented (and with an implementation available to the public in
|
| 340 |
+
source code form), and must require no special password or key for
|
| 341 |
+
unpacking, reading or copying.
|
| 342 |
+
|
| 343 |
+
7. Additional Terms.
|
| 344 |
+
|
| 345 |
+
"Additional permissions" are terms that supplement the terms of this
|
| 346 |
+
License by making exceptions from one or more of its conditions.
|
| 347 |
+
Additional permissions that are applicable to the entire Program shall
|
| 348 |
+
be treated as though they were included in this License, to the extent
|
| 349 |
+
that they are valid under applicable law. If additional permissions
|
| 350 |
+
apply only to part of the Program, that part may be used separately
|
| 351 |
+
under those permissions, but the entire Program remains governed by
|
| 352 |
+
this License without regard to the additional permissions.
|
| 353 |
+
|
| 354 |
+
When you convey a copy of a covered work, you may at your option
|
| 355 |
+
remove any additional permissions from that copy, or from any part of
|
| 356 |
+
it. (Additional permissions may be written to require their own
|
| 357 |
+
removal in certain cases when you modify the work.) You may place
|
| 358 |
+
additional permissions on material, added by you to a covered work,
|
| 359 |
+
for which you have or can give appropriate copyright permission.
|
| 360 |
+
|
| 361 |
+
Notwithstanding any other provision of this License, for material you
|
| 362 |
+
add to a covered work, you may (if authorized by the copyright holders of
|
| 363 |
+
that material) supplement the terms of this License with terms:
|
| 364 |
+
|
| 365 |
+
a) Disclaiming warranty or limiting liability differently from the
|
| 366 |
+
terms of sections 15 and 16 of this License; or
|
| 367 |
+
|
| 368 |
+
b) Requiring preservation of specified reasonable legal notices or
|
| 369 |
+
author attributions in that material or in the Appropriate Legal
|
| 370 |
+
Notices displayed by works containing it; or
|
| 371 |
+
|
| 372 |
+
c) Prohibiting misrepresentation of the origin of that material, or
|
| 373 |
+
requiring that modified versions of such material be marked in
|
| 374 |
+
reasonable ways as different from the original version; or
|
| 375 |
+
|
| 376 |
+
d) Limiting the use for publicity purposes of names of licensors or
|
| 377 |
+
authors of the material; or
|
| 378 |
+
|
| 379 |
+
e) Declining to grant rights under trademark law for use of some
|
| 380 |
+
trade names, trademarks, or service marks; or
|
| 381 |
+
|
| 382 |
+
f) Requiring indemnification of licensors and authors of that
|
| 383 |
+
material by anyone who conveys the material (or modified versions of
|
| 384 |
+
it) with contractual assumptions of liability to the recipient, for
|
| 385 |
+
any liability that these contractual assumptions directly impose on
|
| 386 |
+
those licensors and authors.
|
| 387 |
+
|
| 388 |
+
All other non-permissive additional terms are considered "further
|
| 389 |
+
restrictions" within the meaning of section 10. If the Program as you
|
| 390 |
+
received it, or any part of it, contains a notice stating that it is
|
| 391 |
+
governed by this License along with a term that is a further
|
| 392 |
+
restriction, you may remove that term. If a license document contains
|
| 393 |
+
a further restriction but permits relicensing or conveying under this
|
| 394 |
+
License, you may add to a covered work material governed by the terms
|
| 395 |
+
of that license document, provided that the further restriction does
|
| 396 |
+
not survive such relicensing or conveying.
|
| 397 |
+
|
| 398 |
+
If you add terms to a covered work in accord with this section, you
|
| 399 |
+
must place, in the relevant source files, a statement of the
|
| 400 |
+
additional terms that apply to those files, or a notice indicating
|
| 401 |
+
where to find the applicable terms.
|
| 402 |
+
|
| 403 |
+
Additional terms, permissive or non-permissive, may be stated in the
|
| 404 |
+
form of a separately written license, or stated as exceptions;
|
| 405 |
+
the above requirements apply either way.
|
| 406 |
+
|
| 407 |
+
8. Termination.
|
| 408 |
+
|
| 409 |
+
You may not propagate or modify a covered work except as expressly
|
| 410 |
+
provided under this License. Any attempt otherwise to propagate or
|
| 411 |
+
modify it is void, and will automatically terminate your rights under
|
| 412 |
+
this License (including any patent licenses granted under the third
|
| 413 |
+
paragraph of section 11).
|
| 414 |
+
|
| 415 |
+
However, if you cease all violation of this License, then your
|
| 416 |
+
license from a particular copyright holder is reinstated (a)
|
| 417 |
+
provisionally, unless and until the copyright holder explicitly and
|
| 418 |
+
finally terminates your license, and (b) permanently, if the copyright
|
| 419 |
+
holder fails to notify you of the violation by some reasonable means
|
| 420 |
+
prior to 60 days after the cessation.
|
| 421 |
+
|
| 422 |
+
Moreover, your license from a particular copyright holder is
|
| 423 |
+
reinstated permanently if the copyright holder notifies you of the
|
| 424 |
+
violation by some reasonable means, this is the first time you have
|
| 425 |
+
received notice of violation of this License (for any work) from that
|
| 426 |
+
copyright holder, and you cure the violation prior to 30 days after
|
| 427 |
+
your receipt of the notice.
|
| 428 |
+
|
| 429 |
+
Termination of your rights under this section does not terminate the
|
| 430 |
+
licenses of parties who have received copies or rights from you under
|
| 431 |
+
this License. If your rights have been terminated and not permanently
|
| 432 |
+
reinstated, you do not qualify to receive new licenses for the same
|
| 433 |
+
material under section 10.
|
| 434 |
+
|
| 435 |
+
9. Acceptance Not Required for Having Copies.
|
| 436 |
+
|
| 437 |
+
You are not required to accept this License in order to receive or
|
| 438 |
+
run a copy of the Program. Ancillary propagation of a covered work
|
| 439 |
+
occurring solely as a consequence of using peer-to-peer transmission
|
| 440 |
+
to receive a copy likewise does not require acceptance. However,
|
| 441 |
+
nothing other than this License grants you permission to propagate or
|
| 442 |
+
modify any covered work. These actions infringe copyright if you do
|
| 443 |
+
not accept this License. Therefore, by modifying or propagating a
|
| 444 |
+
covered work, you indicate your acceptance of this License to do so.
|
| 445 |
+
|
| 446 |
+
10. Automatic Licensing of Downstream Recipients.
|
| 447 |
+
|
| 448 |
+
Each time you convey a covered work, the recipient automatically
|
| 449 |
+
receives a license from the original licensors, to run, modify and
|
| 450 |
+
propagate that work, subject to this License. You are not responsible
|
| 451 |
+
for enforcing compliance by third parties with this License.
|
| 452 |
+
|
| 453 |
+
An "entity transaction" is a transaction transferring control of an
|
| 454 |
+
organization, or substantially all assets of one, or subdividing an
|
| 455 |
+
organization, or merging organizations. If propagation of a covered
|
| 456 |
+
work results from an entity transaction, each party to that
|
| 457 |
+
transaction who receives a copy of the work also receives whatever
|
| 458 |
+
licenses to the work the party's predecessor in interest had or could
|
| 459 |
+
give under the previous paragraph, plus a right to possession of the
|
| 460 |
+
Corresponding Source of the work from the predecessor in interest, if
|
| 461 |
+
the predecessor has it or can get it with reasonable efforts.
|
| 462 |
+
|
| 463 |
+
You may not impose any further restrictions on the exercise of the
|
| 464 |
+
rights granted or affirmed under this License. For example, you may
|
| 465 |
+
not impose a license fee, royalty, or other charge for exercise of
|
| 466 |
+
rights granted under this License, and you may not initiate litigation
|
| 467 |
+
(including a cross-claim or counterclaim in a lawsuit) alleging that
|
| 468 |
+
any patent claim is infringed by making, using, selling, offering for
|
| 469 |
+
sale, or importing the Program or any portion of it.
|
| 470 |
+
|
| 471 |
+
11. Patents.
|
| 472 |
+
|
| 473 |
+
A "contributor" is a copyright holder who authorizes use under this
|
| 474 |
+
License of the Program or a work on which the Program is based. The
|
| 475 |
+
work thus licensed is called the contributor's "contributor version".
|
| 476 |
+
|
| 477 |
+
A contributor's "essential patent claims" are all patent claims
|
| 478 |
+
owned or controlled by the contributor, whether already acquired or
|
| 479 |
+
hereafter acquired, that would be infringed by some manner, permitted
|
| 480 |
+
by this License, of making, using, or selling its contributor version,
|
| 481 |
+
but do not include claims that would be infringed only as a
|
| 482 |
+
consequence of further modification of the contributor version. For
|
| 483 |
+
purposes of this definition, "control" includes the right to grant
|
| 484 |
+
patent sublicenses in a manner consistent with the requirements of
|
| 485 |
+
this License.
|
| 486 |
+
|
| 487 |
+
Each contributor grants you a non-exclusive, worldwide, royalty-free
|
| 488 |
+
patent license under the contributor's essential patent claims, to
|
| 489 |
+
make, use, sell, offer for sale, import and otherwise run, modify and
|
| 490 |
+
propagate the contents of its contributor version.
|
| 491 |
+
|
| 492 |
+
In the following three paragraphs, a "patent license" is any express
|
| 493 |
+
agreement or commitment, however denominated, not to enforce a patent
|
| 494 |
+
(such as an express permission to practice a patent or covenant not to
|
| 495 |
+
sue for patent infringement). To "grant" such a patent license to a
|
| 496 |
+
party means to make such an agreement or commitment not to enforce a
|
| 497 |
+
patent against the party.
|
| 498 |
+
|
| 499 |
+
If you convey a covered work, knowingly relying on a patent license,
|
| 500 |
+
and the Corresponding Source of the work is not available for anyone
|
| 501 |
+
to copy, free of charge and under the terms of this License, through a
|
| 502 |
+
publicly available network server or other readily accessible means,
|
| 503 |
+
then you must either (1) cause the Corresponding Source to be so
|
| 504 |
+
available, or (2) arrange to deprive yourself of the benefit of the
|
| 505 |
+
patent license for this particular work, or (3) arrange, in a manner
|
| 506 |
+
consistent with the requirements of this License, to extend the patent
|
| 507 |
+
license to downstream recipients. "Knowingly relying" means you have
|
| 508 |
+
actual knowledge that, but for the patent license, your conveying the
|
| 509 |
+
covered work in a country, or your recipient's use of the covered work
|
| 510 |
+
in a country, would infringe one or more identifiable patents in that
|
| 511 |
+
country that you have reason to believe are valid.
|
| 512 |
+
|
| 513 |
+
If, pursuant to or in connection with a single transaction or
|
| 514 |
+
arrangement, you convey, or propagate by procuring conveyance of, a
|
| 515 |
+
covered work, and grant a patent license to some of the parties
|
| 516 |
+
receiving the covered work authorizing them to use, propagate, modify
|
| 517 |
+
or convey a specific copy of the covered work, then the patent license
|
| 518 |
+
you grant is automatically extended to all recipients of the covered
|
| 519 |
+
work and works based on it.
|
| 520 |
+
|
| 521 |
+
A patent license is "discriminatory" if it does not include within
|
| 522 |
+
the scope of its coverage, prohibits the exercise of, or is
|
| 523 |
+
conditioned on the non-exercise of one or more of the rights that are
|
| 524 |
+
specifically granted under this License. You may not convey a covered
|
| 525 |
+
work if you are a party to an arrangement with a third party that is
|
| 526 |
+
in the business of distributing software, under which you make payment
|
| 527 |
+
to the third party based on the extent of your activity of conveying
|
| 528 |
+
the work, and under which the third party grants, to any of the
|
| 529 |
+
parties who would receive the covered work from you, a discriminatory
|
| 530 |
+
patent license (a) in connection with copies of the covered work
|
| 531 |
+
conveyed by you (or copies made from those copies), or (b) primarily
|
| 532 |
+
for and in connection with specific products or compilations that
|
| 533 |
+
contain the covered work, unless you entered into that arrangement,
|
| 534 |
+
or that patent license was granted, prior to 28 March 2007.
|
| 535 |
+
|
| 536 |
+
Nothing in this License shall be construed as excluding or limiting
|
| 537 |
+
any implied license or other defenses to infringement that may
|
| 538 |
+
otherwise be available to you under applicable patent law.
|
| 539 |
+
|
| 540 |
+
12. No Surrender of Others' Freedom.
|
| 541 |
+
|
| 542 |
+
If conditions are imposed on you (whether by court order, agreement or
|
| 543 |
+
otherwise) that contradict the conditions of this License, they do not
|
| 544 |
+
excuse you from the conditions of this License. If you cannot convey a
|
| 545 |
+
covered work so as to satisfy simultaneously your obligations under this
|
| 546 |
+
License and any other pertinent obligations, then as a consequence you may
|
| 547 |
+
not convey it at all. For example, if you agree to terms that obligate you
|
| 548 |
+
to collect a royalty for further conveying from those to whom you convey
|
| 549 |
+
the Program, the only way you could satisfy both those terms and this
|
| 550 |
+
License would be to refrain entirely from conveying the Program.
|
| 551 |
+
|
| 552 |
+
13. Use with the GNU Affero General Public License.
|
| 553 |
+
|
| 554 |
+
Notwithstanding any other provision of this License, you have
|
| 555 |
+
permission to link or combine any covered work with a work licensed
|
| 556 |
+
under version 3 of the GNU Affero General Public License into a single
|
| 557 |
+
combined work, and to convey the resulting work. The terms of this
|
| 558 |
+
License will continue to apply to the part which is the covered work,
|
| 559 |
+
but the special requirements of the GNU Affero General Public License,
|
| 560 |
+
section 13, concerning interaction through a network will apply to the
|
| 561 |
+
combination as such.
|
| 562 |
+
|
| 563 |
+
14. Revised Versions of this License.
|
| 564 |
+
|
| 565 |
+
The Free Software Foundation may publish revised and/or new versions of
|
| 566 |
+
the GNU General Public License from time to time. Such new versions will
|
| 567 |
+
be similar in spirit to the present version, but may differ in detail to
|
| 568 |
+
address new problems or concerns.
|
| 569 |
+
|
| 570 |
+
Each version is given a distinguishing version number. If the
|
| 571 |
+
Program specifies that a certain numbered version of the GNU General
|
| 572 |
+
Public License "or any later version" applies to it, you have the
|
| 573 |
+
option of following the terms and conditions either of that numbered
|
| 574 |
+
version or of any later version published by the Free Software
|
| 575 |
+
Foundation. If the Program does not specify a version number of the
|
| 576 |
+
GNU General Public License, you may choose any version ever published
|
| 577 |
+
by the Free Software Foundation.
|
| 578 |
+
|
| 579 |
+
If the Program specifies that a proxy can decide which future
|
| 580 |
+
versions of the GNU General Public License can be used, that proxy's
|
| 581 |
+
public statement of acceptance of a version permanently authorizes you
|
| 582 |
+
to choose that version for the Program.
|
| 583 |
+
|
| 584 |
+
Later license versions may give you additional or different
|
| 585 |
+
permissions. However, no additional obligations are imposed on any
|
| 586 |
+
author or copyright holder as a result of your choosing to follow a
|
| 587 |
+
later version.
|
| 588 |
+
|
| 589 |
+
15. Disclaimer of Warranty.
|
| 590 |
+
|
| 591 |
+
THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY
|
| 592 |
+
APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT
|
| 593 |
+
HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY
|
| 594 |
+
OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO,
|
| 595 |
+
THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
|
| 596 |
+
PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM
|
| 597 |
+
IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF
|
| 598 |
+
ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
|
| 599 |
+
|
| 600 |
+
16. Limitation of Liability.
|
| 601 |
+
|
| 602 |
+
IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
|
| 603 |
+
WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS
|
| 604 |
+
THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY
|
| 605 |
+
GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE
|
| 606 |
+
USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF
|
| 607 |
+
DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD
|
| 608 |
+
PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS),
|
| 609 |
+
EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF
|
| 610 |
+
SUCH DAMAGES.
|
| 611 |
+
|
| 612 |
+
17. Interpretation of Sections 15 and 16.
|
| 613 |
+
|
| 614 |
+
If the disclaimer of warranty and limitation of liability provided
|
| 615 |
+
above cannot be given local legal effect according to their terms,
|
| 616 |
+
reviewing courts shall apply local law that most closely approximates
|
| 617 |
+
an absolute waiver of all civil liability in connection with the
|
| 618 |
+
Program, unless a warranty or assumption of liability accompanies a
|
| 619 |
+
copy of the Program in return for a fee.
|
| 620 |
+
|
| 621 |
+
END OF TERMS AND CONDITIONS
|
| 622 |
+
|
| 623 |
+
How to Apply These Terms to Your New Programs
|
| 624 |
+
|
| 625 |
+
If you develop a new program, and you want it to be of the greatest
|
| 626 |
+
possible use to the public, the best way to achieve this is to make it
|
| 627 |
+
free software which everyone can redistribute and change under these terms.
|
| 628 |
+
|
| 629 |
+
To do so, attach the following notices to the program. It is safest
|
| 630 |
+
to attach them to the start of each source file to most effectively
|
| 631 |
+
state the exclusion of warranty; and each file should have at least
|
| 632 |
+
the "copyright" line and a pointer to where the full notice is found.
|
| 633 |
+
|
| 634 |
+
<one line to give the program's name and a brief idea of what it does.>
|
| 635 |
+
Copyright (C) <year> <name of author>
|
| 636 |
+
|
| 637 |
+
This program is free software: you can redistribute it and/or modify
|
| 638 |
+
it under the terms of the GNU General Public License as published by
|
| 639 |
+
the Free Software Foundation, either version 3 of the License, or
|
| 640 |
+
(at your option) any later version.
|
| 641 |
+
|
| 642 |
+
This program is distributed in the hope that it will be useful,
|
| 643 |
+
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
| 644 |
+
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
| 645 |
+
GNU General Public License for more details.
|
| 646 |
+
|
| 647 |
+
You should have received a copy of the GNU General Public License
|
| 648 |
+
along with this program. If not, see <https://www.gnu.org/licenses/>.
|
| 649 |
+
|
| 650 |
+
Also add information on how to contact you by electronic and paper mail.
|
| 651 |
+
|
| 652 |
+
If the program does terminal interaction, make it output a short
|
| 653 |
+
notice like this when it starts in an interactive mode:
|
| 654 |
+
|
| 655 |
+
<program> Copyright (C) <year> <name of author>
|
| 656 |
+
This program comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
|
| 657 |
+
This is free software, and you are welcome to redistribute it
|
| 658 |
+
under certain conditions; type `show c' for details.
|
| 659 |
+
|
| 660 |
+
The hypothetical commands `show w' and `show c' should show the appropriate
|
| 661 |
+
parts of the General Public License. Of course, your program's commands
|
| 662 |
+
might be different; for a GUI interface, you would use an "about box".
|
| 663 |
+
|
| 664 |
+
You should also get your employer (if you work as a programmer) or school,
|
| 665 |
+
if any, to sign a "copyright disclaimer" for the program, if necessary.
|
| 666 |
+
For more information on this, and how to apply and follow the GNU GPL, see
|
| 667 |
+
<https://www.gnu.org/licenses/>.
|
| 668 |
+
|
| 669 |
+
The GNU General Public License does not permit incorporating your program
|
| 670 |
+
into proprietary programs. If your program is a subroutine library, you
|
| 671 |
+
may consider it more useful to permit linking proprietary applications with
|
| 672 |
+
the library. If this is what you want to do, use the GNU Lesser General
|
| 673 |
+
Public License instead of this License. But first, please read
|
| 674 |
+
<https://www.gnu.org/licenses/why-not-lgpl.html>.
|
cfg/baseline/r50-csp.yaml
ADDED
|
@@ -0,0 +1,49 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# CSP-ResNet backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Stem, [128]], # 0-P1/2
|
| 16 |
+
[-1, 3, ResCSPC, [128]],
|
| 17 |
+
[-1, 1, Conv, [256, 3, 2]], # 2-P3/8
|
| 18 |
+
[-1, 4, ResCSPC, [256]],
|
| 19 |
+
[-1, 1, Conv, [512, 3, 2]], # 4-P3/8
|
| 20 |
+
[-1, 6, ResCSPC, [512]],
|
| 21 |
+
[-1, 1, Conv, [1024, 3, 2]], # 6-P3/8
|
| 22 |
+
[-1, 3, ResCSPC, [1024]], # 7
|
| 23 |
+
]
|
| 24 |
+
|
| 25 |
+
# CSP-Res-PAN head
|
| 26 |
+
head:
|
| 27 |
+
[[-1, 1, SPPCSPC, [512]], # 8
|
| 28 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 29 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 30 |
+
[5, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 31 |
+
[[-1, -2], 1, Concat, [1]],
|
| 32 |
+
[-1, 2, ResCSPB, [256]], # 13
|
| 33 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 34 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 35 |
+
[3, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 36 |
+
[[-1, -2], 1, Concat, [1]],
|
| 37 |
+
[-1, 2, ResCSPB, [128]], # 18
|
| 38 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 39 |
+
[-2, 1, Conv, [256, 3, 2]],
|
| 40 |
+
[[-1, 13], 1, Concat, [1]], # cat
|
| 41 |
+
[-1, 2, ResCSPB, [256]], # 22
|
| 42 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 43 |
+
[-2, 1, Conv, [512, 3, 2]],
|
| 44 |
+
[[-1, 8], 1, Concat, [1]], # cat
|
| 45 |
+
[-1, 2, ResCSPB, [512]], # 26
|
| 46 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 47 |
+
|
| 48 |
+
[[19,23,27], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 49 |
+
]
|
cfg/baseline/x50-csp.yaml
ADDED
|
@@ -0,0 +1,49 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# CSP-ResNeXt backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Stem, [128]], # 0-P1/2
|
| 16 |
+
[-1, 3, ResXCSPC, [128]],
|
| 17 |
+
[-1, 1, Conv, [256, 3, 2]], # 2-P3/8
|
| 18 |
+
[-1, 4, ResXCSPC, [256]],
|
| 19 |
+
[-1, 1, Conv, [512, 3, 2]], # 4-P3/8
|
| 20 |
+
[-1, 6, ResXCSPC, [512]],
|
| 21 |
+
[-1, 1, Conv, [1024, 3, 2]], # 6-P3/8
|
| 22 |
+
[-1, 3, ResXCSPC, [1024]], # 7
|
| 23 |
+
]
|
| 24 |
+
|
| 25 |
+
# CSP-ResX-PAN head
|
| 26 |
+
head:
|
| 27 |
+
[[-1, 1, SPPCSPC, [512]], # 8
|
| 28 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 29 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 30 |
+
[5, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 31 |
+
[[-1, -2], 1, Concat, [1]],
|
| 32 |
+
[-1, 2, ResXCSPB, [256]], # 13
|
| 33 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 34 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 35 |
+
[3, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 36 |
+
[[-1, -2], 1, Concat, [1]],
|
| 37 |
+
[-1, 2, ResXCSPB, [128]], # 18
|
| 38 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 39 |
+
[-2, 1, Conv, [256, 3, 2]],
|
| 40 |
+
[[-1, 13], 1, Concat, [1]], # cat
|
| 41 |
+
[-1, 2, ResXCSPB, [256]], # 22
|
| 42 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 43 |
+
[-2, 1, Conv, [512, 3, 2]],
|
| 44 |
+
[[-1, 8], 1, Concat, [1]], # cat
|
| 45 |
+
[-1, 2, ResXCSPB, [512]], # 26
|
| 46 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 47 |
+
|
| 48 |
+
[[19,23,27], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 49 |
+
]
|
cfg/baseline/yolor-csp-x.yaml
ADDED
|
@@ -0,0 +1,52 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.33 # model depth multiple
|
| 4 |
+
width_multiple: 1.25 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# CSP-Darknet backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 1]], # 0
|
| 16 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
|
| 17 |
+
[-1, 1, Bottleneck, [64]],
|
| 18 |
+
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
|
| 19 |
+
[-1, 2, BottleneckCSPC, [128]],
|
| 20 |
+
[-1, 1, Conv, [256, 3, 2]], # 5-P3/8
|
| 21 |
+
[-1, 8, BottleneckCSPC, [256]],
|
| 22 |
+
[-1, 1, Conv, [512, 3, 2]], # 7-P4/16
|
| 23 |
+
[-1, 8, BottleneckCSPC, [512]],
|
| 24 |
+
[-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
|
| 25 |
+
[-1, 4, BottleneckCSPC, [1024]], # 10
|
| 26 |
+
]
|
| 27 |
+
|
| 28 |
+
# CSP-Dark-PAN head
|
| 29 |
+
head:
|
| 30 |
+
[[-1, 1, SPPCSPC, [512]], # 11
|
| 31 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 32 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 33 |
+
[8, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 34 |
+
[[-1, -2], 1, Concat, [1]],
|
| 35 |
+
[-1, 2, BottleneckCSPB, [256]], # 16
|
| 36 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 37 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 38 |
+
[6, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 39 |
+
[[-1, -2], 1, Concat, [1]],
|
| 40 |
+
[-1, 2, BottleneckCSPB, [128]], # 21
|
| 41 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 42 |
+
[-2, 1, Conv, [256, 3, 2]],
|
| 43 |
+
[[-1, 16], 1, Concat, [1]], # cat
|
| 44 |
+
[-1, 2, BottleneckCSPB, [256]], # 25
|
| 45 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 46 |
+
[-2, 1, Conv, [512, 3, 2]],
|
| 47 |
+
[[-1, 11], 1, Concat, [1]], # cat
|
| 48 |
+
[-1, 2, BottleneckCSPB, [512]], # 29
|
| 49 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 50 |
+
|
| 51 |
+
[[22,26,30], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 52 |
+
]
|
cfg/baseline/yolor-csp.yaml
ADDED
|
@@ -0,0 +1,52 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# CSP-Darknet backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 1]], # 0
|
| 16 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
|
| 17 |
+
[-1, 1, Bottleneck, [64]],
|
| 18 |
+
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
|
| 19 |
+
[-1, 2, BottleneckCSPC, [128]],
|
| 20 |
+
[-1, 1, Conv, [256, 3, 2]], # 5-P3/8
|
| 21 |
+
[-1, 8, BottleneckCSPC, [256]],
|
| 22 |
+
[-1, 1, Conv, [512, 3, 2]], # 7-P4/16
|
| 23 |
+
[-1, 8, BottleneckCSPC, [512]],
|
| 24 |
+
[-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
|
| 25 |
+
[-1, 4, BottleneckCSPC, [1024]], # 10
|
| 26 |
+
]
|
| 27 |
+
|
| 28 |
+
# CSP-Dark-PAN head
|
| 29 |
+
head:
|
| 30 |
+
[[-1, 1, SPPCSPC, [512]], # 11
|
| 31 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 32 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 33 |
+
[8, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 34 |
+
[[-1, -2], 1, Concat, [1]],
|
| 35 |
+
[-1, 2, BottleneckCSPB, [256]], # 16
|
| 36 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 37 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 38 |
+
[6, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 39 |
+
[[-1, -2], 1, Concat, [1]],
|
| 40 |
+
[-1, 2, BottleneckCSPB, [128]], # 21
|
| 41 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 42 |
+
[-2, 1, Conv, [256, 3, 2]],
|
| 43 |
+
[[-1, 16], 1, Concat, [1]], # cat
|
| 44 |
+
[-1, 2, BottleneckCSPB, [256]], # 25
|
| 45 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 46 |
+
[-2, 1, Conv, [512, 3, 2]],
|
| 47 |
+
[[-1, 11], 1, Concat, [1]], # cat
|
| 48 |
+
[-1, 2, BottleneckCSPB, [512]], # 29
|
| 49 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 50 |
+
|
| 51 |
+
[[22,26,30], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 52 |
+
]
|
cfg/baseline/yolor-d6.yaml
ADDED
|
@@ -0,0 +1,63 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # expand model depth
|
| 4 |
+
width_multiple: 1.25 # expand layer channels
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# CSP-Darknet backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args]
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [64, 3, 1]], # 1-P1/2
|
| 18 |
+
[-1, 1, DownC, [128]], # 2-P2/4
|
| 19 |
+
[-1, 3, BottleneckCSPA, [128]],
|
| 20 |
+
[-1, 1, DownC, [256]], # 4-P3/8
|
| 21 |
+
[-1, 15, BottleneckCSPA, [256]],
|
| 22 |
+
[-1, 1, DownC, [512]], # 6-P4/16
|
| 23 |
+
[-1, 15, BottleneckCSPA, [512]],
|
| 24 |
+
[-1, 1, DownC, [768]], # 8-P5/32
|
| 25 |
+
[-1, 7, BottleneckCSPA, [768]],
|
| 26 |
+
[-1, 1, DownC, [1024]], # 10-P6/64
|
| 27 |
+
[-1, 7, BottleneckCSPA, [1024]], # 11
|
| 28 |
+
]
|
| 29 |
+
|
| 30 |
+
# CSP-Dark-PAN head
|
| 31 |
+
head:
|
| 32 |
+
[[-1, 1, SPPCSPC, [512]], # 12
|
| 33 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 34 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 35 |
+
[-6, 1, Conv, [384, 1, 1]], # route backbone P5
|
| 36 |
+
[[-1, -2], 1, Concat, [1]],
|
| 37 |
+
[-1, 3, BottleneckCSPB, [384]], # 17
|
| 38 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 39 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 40 |
+
[-13, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 41 |
+
[[-1, -2], 1, Concat, [1]],
|
| 42 |
+
[-1, 3, BottleneckCSPB, [256]], # 22
|
| 43 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 44 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 45 |
+
[-20, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 46 |
+
[[-1, -2], 1, Concat, [1]],
|
| 47 |
+
[-1, 3, BottleneckCSPB, [128]], # 27
|
| 48 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 49 |
+
[-2, 1, DownC, [256]],
|
| 50 |
+
[[-1, 22], 1, Concat, [1]], # cat
|
| 51 |
+
[-1, 3, BottleneckCSPB, [256]], # 31
|
| 52 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 53 |
+
[-2, 1, DownC, [384]],
|
| 54 |
+
[[-1, 17], 1, Concat, [1]], # cat
|
| 55 |
+
[-1, 3, BottleneckCSPB, [384]], # 35
|
| 56 |
+
[-1, 1, Conv, [768, 3, 1]],
|
| 57 |
+
[-2, 1, DownC, [512]],
|
| 58 |
+
[[-1, 12], 1, Concat, [1]], # cat
|
| 59 |
+
[-1, 3, BottleneckCSPB, [512]], # 39
|
| 60 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 61 |
+
|
| 62 |
+
[[28,32,36,40], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 63 |
+
]
|
cfg/baseline/yolor-e6.yaml
ADDED
|
@@ -0,0 +1,63 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # expand model depth
|
| 4 |
+
width_multiple: 1.25 # expand layer channels
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# CSP-Darknet backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args]
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [64, 3, 1]], # 1-P1/2
|
| 18 |
+
[-1, 1, DownC, [128]], # 2-P2/4
|
| 19 |
+
[-1, 3, BottleneckCSPA, [128]],
|
| 20 |
+
[-1, 1, DownC, [256]], # 4-P3/8
|
| 21 |
+
[-1, 7, BottleneckCSPA, [256]],
|
| 22 |
+
[-1, 1, DownC, [512]], # 6-P4/16
|
| 23 |
+
[-1, 7, BottleneckCSPA, [512]],
|
| 24 |
+
[-1, 1, DownC, [768]], # 8-P5/32
|
| 25 |
+
[-1, 3, BottleneckCSPA, [768]],
|
| 26 |
+
[-1, 1, DownC, [1024]], # 10-P6/64
|
| 27 |
+
[-1, 3, BottleneckCSPA, [1024]], # 11
|
| 28 |
+
]
|
| 29 |
+
|
| 30 |
+
# CSP-Dark-PAN head
|
| 31 |
+
head:
|
| 32 |
+
[[-1, 1, SPPCSPC, [512]], # 12
|
| 33 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 34 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 35 |
+
[-6, 1, Conv, [384, 1, 1]], # route backbone P5
|
| 36 |
+
[[-1, -2], 1, Concat, [1]],
|
| 37 |
+
[-1, 3, BottleneckCSPB, [384]], # 17
|
| 38 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 39 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 40 |
+
[-13, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 41 |
+
[[-1, -2], 1, Concat, [1]],
|
| 42 |
+
[-1, 3, BottleneckCSPB, [256]], # 22
|
| 43 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 44 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 45 |
+
[-20, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 46 |
+
[[-1, -2], 1, Concat, [1]],
|
| 47 |
+
[-1, 3, BottleneckCSPB, [128]], # 27
|
| 48 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 49 |
+
[-2, 1, DownC, [256]],
|
| 50 |
+
[[-1, 22], 1, Concat, [1]], # cat
|
| 51 |
+
[-1, 3, BottleneckCSPB, [256]], # 31
|
| 52 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 53 |
+
[-2, 1, DownC, [384]],
|
| 54 |
+
[[-1, 17], 1, Concat, [1]], # cat
|
| 55 |
+
[-1, 3, BottleneckCSPB, [384]], # 35
|
| 56 |
+
[-1, 1, Conv, [768, 3, 1]],
|
| 57 |
+
[-2, 1, DownC, [512]],
|
| 58 |
+
[[-1, 12], 1, Concat, [1]], # cat
|
| 59 |
+
[-1, 3, BottleneckCSPB, [512]], # 39
|
| 60 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 61 |
+
|
| 62 |
+
[[28,32,36,40], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 63 |
+
]
|
cfg/baseline/yolor-p6.yaml
ADDED
|
@@ -0,0 +1,63 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # expand model depth
|
| 4 |
+
width_multiple: 1.0 # expand layer channels
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# CSP-Darknet backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args]
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [64, 3, 1]], # 1-P1/2
|
| 18 |
+
[-1, 1, Conv, [128, 3, 2]], # 2-P2/4
|
| 19 |
+
[-1, 3, BottleneckCSPA, [128]],
|
| 20 |
+
[-1, 1, Conv, [256, 3, 2]], # 4-P3/8
|
| 21 |
+
[-1, 7, BottleneckCSPA, [256]],
|
| 22 |
+
[-1, 1, Conv, [384, 3, 2]], # 6-P4/16
|
| 23 |
+
[-1, 7, BottleneckCSPA, [384]],
|
| 24 |
+
[-1, 1, Conv, [512, 3, 2]], # 8-P5/32
|
| 25 |
+
[-1, 3, BottleneckCSPA, [512]],
|
| 26 |
+
[-1, 1, Conv, [640, 3, 2]], # 10-P6/64
|
| 27 |
+
[-1, 3, BottleneckCSPA, [640]], # 11
|
| 28 |
+
]
|
| 29 |
+
|
| 30 |
+
# CSP-Dark-PAN head
|
| 31 |
+
head:
|
| 32 |
+
[[-1, 1, SPPCSPC, [320]], # 12
|
| 33 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 34 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 35 |
+
[-6, 1, Conv, [256, 1, 1]], # route backbone P5
|
| 36 |
+
[[-1, -2], 1, Concat, [1]],
|
| 37 |
+
[-1, 3, BottleneckCSPB, [256]], # 17
|
| 38 |
+
[-1, 1, Conv, [192, 1, 1]],
|
| 39 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 40 |
+
[-13, 1, Conv, [192, 1, 1]], # route backbone P4
|
| 41 |
+
[[-1, -2], 1, Concat, [1]],
|
| 42 |
+
[-1, 3, BottleneckCSPB, [192]], # 22
|
| 43 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 44 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 45 |
+
[-20, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 46 |
+
[[-1, -2], 1, Concat, [1]],
|
| 47 |
+
[-1, 3, BottleneckCSPB, [128]], # 27
|
| 48 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 49 |
+
[-2, 1, Conv, [192, 3, 2]],
|
| 50 |
+
[[-1, 22], 1, Concat, [1]], # cat
|
| 51 |
+
[-1, 3, BottleneckCSPB, [192]], # 31
|
| 52 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 53 |
+
[-2, 1, Conv, [256, 3, 2]],
|
| 54 |
+
[[-1, 17], 1, Concat, [1]], # cat
|
| 55 |
+
[-1, 3, BottleneckCSPB, [256]], # 35
|
| 56 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 57 |
+
[-2, 1, Conv, [320, 3, 2]],
|
| 58 |
+
[[-1, 12], 1, Concat, [1]], # cat
|
| 59 |
+
[-1, 3, BottleneckCSPB, [320]], # 39
|
| 60 |
+
[-1, 1, Conv, [640, 3, 1]],
|
| 61 |
+
|
| 62 |
+
[[28,32,36,40], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 63 |
+
]
|
cfg/baseline/yolor-w6.yaml
ADDED
|
@@ -0,0 +1,63 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # expand model depth
|
| 4 |
+
width_multiple: 1.0 # expand layer channels
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# CSP-Darknet backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args]
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [64, 3, 1]], # 1-P1/2
|
| 18 |
+
[-1, 1, Conv, [128, 3, 2]], # 2-P2/4
|
| 19 |
+
[-1, 3, BottleneckCSPA, [128]],
|
| 20 |
+
[-1, 1, Conv, [256, 3, 2]], # 4-P3/8
|
| 21 |
+
[-1, 7, BottleneckCSPA, [256]],
|
| 22 |
+
[-1, 1, Conv, [512, 3, 2]], # 6-P4/16
|
| 23 |
+
[-1, 7, BottleneckCSPA, [512]],
|
| 24 |
+
[-1, 1, Conv, [768, 3, 2]], # 8-P5/32
|
| 25 |
+
[-1, 3, BottleneckCSPA, [768]],
|
| 26 |
+
[-1, 1, Conv, [1024, 3, 2]], # 10-P6/64
|
| 27 |
+
[-1, 3, BottleneckCSPA, [1024]], # 11
|
| 28 |
+
]
|
| 29 |
+
|
| 30 |
+
# CSP-Dark-PAN head
|
| 31 |
+
head:
|
| 32 |
+
[[-1, 1, SPPCSPC, [512]], # 12
|
| 33 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 34 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 35 |
+
[-6, 1, Conv, [384, 1, 1]], # route backbone P5
|
| 36 |
+
[[-1, -2], 1, Concat, [1]],
|
| 37 |
+
[-1, 3, BottleneckCSPB, [384]], # 17
|
| 38 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 39 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 40 |
+
[-13, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 41 |
+
[[-1, -2], 1, Concat, [1]],
|
| 42 |
+
[-1, 3, BottleneckCSPB, [256]], # 22
|
| 43 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 44 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 45 |
+
[-20, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 46 |
+
[[-1, -2], 1, Concat, [1]],
|
| 47 |
+
[-1, 3, BottleneckCSPB, [128]], # 27
|
| 48 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 49 |
+
[-2, 1, Conv, [256, 3, 2]],
|
| 50 |
+
[[-1, 22], 1, Concat, [1]], # cat
|
| 51 |
+
[-1, 3, BottleneckCSPB, [256]], # 31
|
| 52 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 53 |
+
[-2, 1, Conv, [384, 3, 2]],
|
| 54 |
+
[[-1, 17], 1, Concat, [1]], # cat
|
| 55 |
+
[-1, 3, BottleneckCSPB, [384]], # 35
|
| 56 |
+
[-1, 1, Conv, [768, 3, 1]],
|
| 57 |
+
[-2, 1, Conv, [512, 3, 2]],
|
| 58 |
+
[[-1, 12], 1, Concat, [1]], # cat
|
| 59 |
+
[-1, 3, BottleneckCSPB, [512]], # 39
|
| 60 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 61 |
+
|
| 62 |
+
[[28,32,36,40], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 63 |
+
]
|
cfg/baseline/yolov3-spp.yaml
ADDED
|
@@ -0,0 +1,51 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [10,13, 16,30, 33,23] # P3/8
|
| 9 |
+
- [30,61, 62,45, 59,119] # P4/16
|
| 10 |
+
- [116,90, 156,198, 373,326] # P5/32
|
| 11 |
+
|
| 12 |
+
# darknet53 backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 1]], # 0
|
| 16 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
|
| 17 |
+
[-1, 1, Bottleneck, [64]],
|
| 18 |
+
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
|
| 19 |
+
[-1, 2, Bottleneck, [128]],
|
| 20 |
+
[-1, 1, Conv, [256, 3, 2]], # 5-P3/8
|
| 21 |
+
[-1, 8, Bottleneck, [256]],
|
| 22 |
+
[-1, 1, Conv, [512, 3, 2]], # 7-P4/16
|
| 23 |
+
[-1, 8, Bottleneck, [512]],
|
| 24 |
+
[-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
|
| 25 |
+
[-1, 4, Bottleneck, [1024]], # 10
|
| 26 |
+
]
|
| 27 |
+
|
| 28 |
+
# YOLOv3-SPP head
|
| 29 |
+
head:
|
| 30 |
+
[[-1, 1, Bottleneck, [1024, False]],
|
| 31 |
+
[-1, 1, SPP, [512, [5, 9, 13]]],
|
| 32 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 33 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 34 |
+
[-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
|
| 35 |
+
|
| 36 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 37 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 38 |
+
[[-1, 8], 1, Concat, [1]], # cat backbone P4
|
| 39 |
+
[-1, 1, Bottleneck, [512, False]],
|
| 40 |
+
[-1, 1, Bottleneck, [512, False]],
|
| 41 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 42 |
+
[-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
|
| 43 |
+
|
| 44 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 45 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 46 |
+
[[-1, 6], 1, Concat, [1]], # cat backbone P3
|
| 47 |
+
[-1, 1, Bottleneck, [256, False]],
|
| 48 |
+
[-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
|
| 49 |
+
|
| 50 |
+
[[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 51 |
+
]
|
cfg/baseline/yolov3.yaml
ADDED
|
@@ -0,0 +1,51 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [10,13, 16,30, 33,23] # P3/8
|
| 9 |
+
- [30,61, 62,45, 59,119] # P4/16
|
| 10 |
+
- [116,90, 156,198, 373,326] # P5/32
|
| 11 |
+
|
| 12 |
+
# darknet53 backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 1]], # 0
|
| 16 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
|
| 17 |
+
[-1, 1, Bottleneck, [64]],
|
| 18 |
+
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
|
| 19 |
+
[-1, 2, Bottleneck, [128]],
|
| 20 |
+
[-1, 1, Conv, [256, 3, 2]], # 5-P3/8
|
| 21 |
+
[-1, 8, Bottleneck, [256]],
|
| 22 |
+
[-1, 1, Conv, [512, 3, 2]], # 7-P4/16
|
| 23 |
+
[-1, 8, Bottleneck, [512]],
|
| 24 |
+
[-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
|
| 25 |
+
[-1, 4, Bottleneck, [1024]], # 10
|
| 26 |
+
]
|
| 27 |
+
|
| 28 |
+
# YOLOv3 head
|
| 29 |
+
head:
|
| 30 |
+
[[-1, 1, Bottleneck, [1024, False]],
|
| 31 |
+
[-1, 1, Conv, [512, [1, 1]]],
|
| 32 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 33 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 34 |
+
[-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)
|
| 35 |
+
|
| 36 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 37 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 38 |
+
[[-1, 8], 1, Concat, [1]], # cat backbone P4
|
| 39 |
+
[-1, 1, Bottleneck, [512, False]],
|
| 40 |
+
[-1, 1, Bottleneck, [512, False]],
|
| 41 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 42 |
+
[-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)
|
| 43 |
+
|
| 44 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 45 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 46 |
+
[[-1, 6], 1, Concat, [1]], # cat backbone P3
|
| 47 |
+
[-1, 1, Bottleneck, [256, False]],
|
| 48 |
+
[-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)
|
| 49 |
+
|
| 50 |
+
[[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 51 |
+
]
|
cfg/baseline/yolov4-csp.yaml
ADDED
|
@@ -0,0 +1,52 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# CSP-Darknet backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 1]], # 0
|
| 16 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
|
| 17 |
+
[-1, 1, Bottleneck, [64]],
|
| 18 |
+
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
|
| 19 |
+
[-1, 2, BottleneckCSPC, [128]],
|
| 20 |
+
[-1, 1, Conv, [256, 3, 2]], # 5-P3/8
|
| 21 |
+
[-1, 8, BottleneckCSPC, [256]],
|
| 22 |
+
[-1, 1, Conv, [512, 3, 2]], # 7-P4/16
|
| 23 |
+
[-1, 8, BottleneckCSPC, [512]],
|
| 24 |
+
[-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
|
| 25 |
+
[-1, 4, BottleneckCSPC, [1024]], # 10
|
| 26 |
+
]
|
| 27 |
+
|
| 28 |
+
# CSP-Dark-PAN head
|
| 29 |
+
head:
|
| 30 |
+
[[-1, 1, SPPCSPC, [512]], # 11
|
| 31 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 32 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 33 |
+
[8, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 34 |
+
[[-1, -2], 1, Concat, [1]],
|
| 35 |
+
[-1, 2, BottleneckCSPB, [256]], # 16
|
| 36 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 37 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 38 |
+
[6, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 39 |
+
[[-1, -2], 1, Concat, [1]],
|
| 40 |
+
[-1, 2, BottleneckCSPB, [128]], # 21
|
| 41 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 42 |
+
[-2, 1, Conv, [256, 3, 2]],
|
| 43 |
+
[[-1, 16], 1, Concat, [1]], # cat
|
| 44 |
+
[-1, 2, BottleneckCSPB, [256]], # 25
|
| 45 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 46 |
+
[-2, 1, Conv, [512, 3, 2]],
|
| 47 |
+
[[-1, 11], 1, Concat, [1]], # cat
|
| 48 |
+
[-1, 2, BottleneckCSPB, [512]], # 29
|
| 49 |
+
[-1, 1, Conv, [1024, 3, 1]],
|
| 50 |
+
|
| 51 |
+
[[22,26,30], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 52 |
+
]
|
cfg/deploy/yolov7-d6.yaml
ADDED
|
@@ -0,0 +1,202 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7-d6 backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args],
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [96, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, DownC, [192]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 29 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 30 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 31 |
+
[-1, 1, Conv, [192, 1, 1]], # 14
|
| 32 |
+
|
| 33 |
+
[-1, 1, DownC, [384]], # 15-P3/8
|
| 34 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 35 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 36 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 37 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 38 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 41 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 42 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 43 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 44 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 45 |
+
[-1, 1, Conv, [384, 1, 1]], # 27
|
| 46 |
+
|
| 47 |
+
[-1, 1, DownC, [768]], # 28-P4/16
|
| 48 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 49 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 50 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 51 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 52 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 53 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 54 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 55 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 56 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 57 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 58 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 59 |
+
[-1, 1, Conv, [768, 1, 1]], # 40
|
| 60 |
+
|
| 61 |
+
[-1, 1, DownC, [1152]], # 41-P5/32
|
| 62 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 63 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 64 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 65 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 66 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 67 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 68 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 69 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 70 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 71 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 72 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 73 |
+
[-1, 1, Conv, [1152, 1, 1]], # 53
|
| 74 |
+
|
| 75 |
+
[-1, 1, DownC, [1536]], # 54-P6/64
|
| 76 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 77 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 78 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 79 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 80 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 81 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 82 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 83 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 84 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 85 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 86 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 87 |
+
[-1, 1, Conv, [1536, 1, 1]], # 66
|
| 88 |
+
]
|
| 89 |
+
|
| 90 |
+
# yolov7-d6 head
|
| 91 |
+
head:
|
| 92 |
+
[[-1, 1, SPPCSPC, [768]], # 67
|
| 93 |
+
|
| 94 |
+
[-1, 1, Conv, [576, 1, 1]],
|
| 95 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 96 |
+
[53, 1, Conv, [576, 1, 1]], # route backbone P5
|
| 97 |
+
[[-1, -2], 1, Concat, [1]],
|
| 98 |
+
|
| 99 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 100 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 101 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 102 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 103 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 104 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 105 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 106 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 107 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 108 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 109 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 110 |
+
[-1, 1, Conv, [576, 1, 1]], # 83
|
| 111 |
+
|
| 112 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 113 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 114 |
+
[40, 1, Conv, [384, 1, 1]], # route backbone P4
|
| 115 |
+
[[-1, -2], 1, Concat, [1]],
|
| 116 |
+
|
| 117 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 118 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 119 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 120 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 121 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 122 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 123 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 124 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 125 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 127 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 128 |
+
[-1, 1, Conv, [384, 1, 1]], # 99
|
| 129 |
+
|
| 130 |
+
[-1, 1, Conv, [192, 1, 1]],
|
| 131 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 132 |
+
[27, 1, Conv, [192, 1, 1]], # route backbone P3
|
| 133 |
+
[[-1, -2], 1, Concat, [1]],
|
| 134 |
+
|
| 135 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 136 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 137 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 138 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 139 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 140 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 141 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 142 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 143 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 144 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 145 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 146 |
+
[-1, 1, Conv, [192, 1, 1]], # 115
|
| 147 |
+
|
| 148 |
+
[-1, 1, DownC, [384]],
|
| 149 |
+
[[-1, 99], 1, Concat, [1]],
|
| 150 |
+
|
| 151 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 152 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 153 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 154 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 155 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 156 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 157 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 158 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 159 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 160 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 161 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 162 |
+
[-1, 1, Conv, [384, 1, 1]], # 129
|
| 163 |
+
|
| 164 |
+
[-1, 1, DownC, [576]],
|
| 165 |
+
[[-1, 83], 1, Concat, [1]],
|
| 166 |
+
|
| 167 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 168 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 169 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 170 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 171 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 172 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 173 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 174 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 175 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 176 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 177 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 178 |
+
[-1, 1, Conv, [576, 1, 1]], # 143
|
| 179 |
+
|
| 180 |
+
[-1, 1, DownC, [768]],
|
| 181 |
+
[[-1, 67], 1, Concat, [1]],
|
| 182 |
+
|
| 183 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 184 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 185 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 186 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 187 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 188 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 189 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 190 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 191 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 192 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 193 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 194 |
+
[-1, 1, Conv, [768, 1, 1]], # 157
|
| 195 |
+
|
| 196 |
+
[115, 1, Conv, [384, 3, 1]],
|
| 197 |
+
[129, 1, Conv, [768, 3, 1]],
|
| 198 |
+
[143, 1, Conv, [1152, 3, 1]],
|
| 199 |
+
[157, 1, Conv, [1536, 3, 1]],
|
| 200 |
+
|
| 201 |
+
[[158,159,160,161], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 202 |
+
]
|
cfg/deploy/yolov7-e6.yaml
ADDED
|
@@ -0,0 +1,180 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7-e6 backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args],
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [80, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, DownC, [160]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 29 |
+
[-1, 1, Conv, [160, 1, 1]], # 12
|
| 30 |
+
|
| 31 |
+
[-1, 1, DownC, [320]], # 13-P3/8
|
| 32 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 33 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 34 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 35 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 36 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 37 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 38 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 41 |
+
[-1, 1, Conv, [320, 1, 1]], # 23
|
| 42 |
+
|
| 43 |
+
[-1, 1, DownC, [640]], # 24-P4/16
|
| 44 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 45 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 46 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 47 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 48 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 49 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 50 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 51 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 52 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 53 |
+
[-1, 1, Conv, [640, 1, 1]], # 34
|
| 54 |
+
|
| 55 |
+
[-1, 1, DownC, [960]], # 35-P5/32
|
| 56 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 57 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 58 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 59 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 60 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 61 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 62 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 63 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 64 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 65 |
+
[-1, 1, Conv, [960, 1, 1]], # 45
|
| 66 |
+
|
| 67 |
+
[-1, 1, DownC, [1280]], # 46-P6/64
|
| 68 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 69 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 70 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 71 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 72 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 73 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 74 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 75 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 76 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 77 |
+
[-1, 1, Conv, [1280, 1, 1]], # 56
|
| 78 |
+
]
|
| 79 |
+
|
| 80 |
+
# yolov7-e6 head
|
| 81 |
+
head:
|
| 82 |
+
[[-1, 1, SPPCSPC, [640]], # 57
|
| 83 |
+
|
| 84 |
+
[-1, 1, Conv, [480, 1, 1]],
|
| 85 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 86 |
+
[45, 1, Conv, [480, 1, 1]], # route backbone P5
|
| 87 |
+
[[-1, -2], 1, Concat, [1]],
|
| 88 |
+
|
| 89 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 90 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 91 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 92 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 93 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 94 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 95 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 97 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 98 |
+
[-1, 1, Conv, [480, 1, 1]], # 71
|
| 99 |
+
|
| 100 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 101 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 102 |
+
[34, 1, Conv, [320, 1, 1]], # route backbone P4
|
| 103 |
+
[[-1, -2], 1, Concat, [1]],
|
| 104 |
+
|
| 105 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 106 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 107 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 108 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 109 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 110 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 111 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 112 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 113 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 114 |
+
[-1, 1, Conv, [320, 1, 1]], # 85
|
| 115 |
+
|
| 116 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 117 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 118 |
+
[23, 1, Conv, [160, 1, 1]], # route backbone P3
|
| 119 |
+
[[-1, -2], 1, Concat, [1]],
|
| 120 |
+
|
| 121 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 122 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 123 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 124 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 125 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 127 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 128 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 129 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 130 |
+
[-1, 1, Conv, [160, 1, 1]], # 99
|
| 131 |
+
|
| 132 |
+
[-1, 1, DownC, [320]],
|
| 133 |
+
[[-1, 85], 1, Concat, [1]],
|
| 134 |
+
|
| 135 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 136 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 137 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 138 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 139 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 140 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 141 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 142 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 143 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 144 |
+
[-1, 1, Conv, [320, 1, 1]], # 111
|
| 145 |
+
|
| 146 |
+
[-1, 1, DownC, [480]],
|
| 147 |
+
[[-1, 71], 1, Concat, [1]],
|
| 148 |
+
|
| 149 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 150 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 151 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 152 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 153 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 154 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 155 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 156 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 157 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 158 |
+
[-1, 1, Conv, [480, 1, 1]], # 123
|
| 159 |
+
|
| 160 |
+
[-1, 1, DownC, [640]],
|
| 161 |
+
[[-1, 57], 1, Concat, [1]],
|
| 162 |
+
|
| 163 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 164 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 165 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 166 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 167 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 168 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 169 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 170 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 171 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 172 |
+
[-1, 1, Conv, [640, 1, 1]], # 135
|
| 173 |
+
|
| 174 |
+
[99, 1, Conv, [320, 3, 1]],
|
| 175 |
+
[111, 1, Conv, [640, 3, 1]],
|
| 176 |
+
[123, 1, Conv, [960, 3, 1]],
|
| 177 |
+
[135, 1, Conv, [1280, 3, 1]],
|
| 178 |
+
|
| 179 |
+
[[136,137,138,139], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 180 |
+
]
|
cfg/deploy/yolov7-e6e.yaml
ADDED
|
@@ -0,0 +1,301 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7-e6e backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args],
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [80, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, DownC, [160]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 29 |
+
[-1, 1, Conv, [160, 1, 1]], # 12
|
| 30 |
+
[-11, 1, Conv, [64, 1, 1]],
|
| 31 |
+
[-12, 1, Conv, [64, 1, 1]],
|
| 32 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 33 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 34 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 35 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 36 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 37 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 38 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 39 |
+
[-1, 1, Conv, [160, 1, 1]], # 22
|
| 40 |
+
[[-1, -11], 1, Shortcut, [1]], # 23
|
| 41 |
+
|
| 42 |
+
[-1, 1, DownC, [320]], # 24-P3/8
|
| 43 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 44 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 45 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 46 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 47 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 48 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 49 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 50 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 51 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 52 |
+
[-1, 1, Conv, [320, 1, 1]], # 34
|
| 53 |
+
[-11, 1, Conv, [128, 1, 1]],
|
| 54 |
+
[-12, 1, Conv, [128, 1, 1]],
|
| 55 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 56 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 57 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 58 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 59 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 60 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 61 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 62 |
+
[-1, 1, Conv, [320, 1, 1]], # 44
|
| 63 |
+
[[-1, -11], 1, Shortcut, [1]], # 45
|
| 64 |
+
|
| 65 |
+
[-1, 1, DownC, [640]], # 46-P4/16
|
| 66 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 67 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 68 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 69 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 70 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 71 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 72 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 73 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 74 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 75 |
+
[-1, 1, Conv, [640, 1, 1]], # 56
|
| 76 |
+
[-11, 1, Conv, [256, 1, 1]],
|
| 77 |
+
[-12, 1, Conv, [256, 1, 1]],
|
| 78 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 79 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 80 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 81 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 82 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 83 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 84 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 85 |
+
[-1, 1, Conv, [640, 1, 1]], # 66
|
| 86 |
+
[[-1, -11], 1, Shortcut, [1]], # 67
|
| 87 |
+
|
| 88 |
+
[-1, 1, DownC, [960]], # 68-P5/32
|
| 89 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 90 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 91 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 92 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 93 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 94 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 95 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 97 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 98 |
+
[-1, 1, Conv, [960, 1, 1]], # 78
|
| 99 |
+
[-11, 1, Conv, [384, 1, 1]],
|
| 100 |
+
[-12, 1, Conv, [384, 1, 1]],
|
| 101 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 102 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 103 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 104 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 105 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 106 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 107 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 108 |
+
[-1, 1, Conv, [960, 1, 1]], # 88
|
| 109 |
+
[[-1, -11], 1, Shortcut, [1]], # 89
|
| 110 |
+
|
| 111 |
+
[-1, 1, DownC, [1280]], # 90-P6/64
|
| 112 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 113 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 114 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 115 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 116 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 117 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 118 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 119 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 120 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 121 |
+
[-1, 1, Conv, [1280, 1, 1]], # 100
|
| 122 |
+
[-11, 1, Conv, [512, 1, 1]],
|
| 123 |
+
[-12, 1, Conv, [512, 1, 1]],
|
| 124 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 125 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 127 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 128 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 129 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 130 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 131 |
+
[-1, 1, Conv, [1280, 1, 1]], # 110
|
| 132 |
+
[[-1, -11], 1, Shortcut, [1]], # 111
|
| 133 |
+
]
|
| 134 |
+
|
| 135 |
+
# yolov7-e6e head
|
| 136 |
+
head:
|
| 137 |
+
[[-1, 1, SPPCSPC, [640]], # 112
|
| 138 |
+
|
| 139 |
+
[-1, 1, Conv, [480, 1, 1]],
|
| 140 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 141 |
+
[89, 1, Conv, [480, 1, 1]], # route backbone P5
|
| 142 |
+
[[-1, -2], 1, Concat, [1]],
|
| 143 |
+
|
| 144 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 145 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 146 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 147 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 148 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 149 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 150 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 151 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 152 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 153 |
+
[-1, 1, Conv, [480, 1, 1]], # 126
|
| 154 |
+
[-11, 1, Conv, [384, 1, 1]],
|
| 155 |
+
[-12, 1, Conv, [384, 1, 1]],
|
| 156 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 157 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 158 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 159 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 160 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 161 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 162 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 163 |
+
[-1, 1, Conv, [480, 1, 1]], # 136
|
| 164 |
+
[[-1, -11], 1, Shortcut, [1]], # 137
|
| 165 |
+
|
| 166 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 167 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 168 |
+
[67, 1, Conv, [320, 1, 1]], # route backbone P4
|
| 169 |
+
[[-1, -2], 1, Concat, [1]],
|
| 170 |
+
|
| 171 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 172 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 173 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 174 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 175 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 176 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 177 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 178 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 179 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 180 |
+
[-1, 1, Conv, [320, 1, 1]], # 151
|
| 181 |
+
[-11, 1, Conv, [256, 1, 1]],
|
| 182 |
+
[-12, 1, Conv, [256, 1, 1]],
|
| 183 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 184 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 185 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 186 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 187 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 188 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 189 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 190 |
+
[-1, 1, Conv, [320, 1, 1]], # 161
|
| 191 |
+
[[-1, -11], 1, Shortcut, [1]], # 162
|
| 192 |
+
|
| 193 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 194 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 195 |
+
[45, 1, Conv, [160, 1, 1]], # route backbone P3
|
| 196 |
+
[[-1, -2], 1, Concat, [1]],
|
| 197 |
+
|
| 198 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 199 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 200 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 201 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 202 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 203 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 204 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 205 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 206 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 207 |
+
[-1, 1, Conv, [160, 1, 1]], # 176
|
| 208 |
+
[-11, 1, Conv, [128, 1, 1]],
|
| 209 |
+
[-12, 1, Conv, [128, 1, 1]],
|
| 210 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 211 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 212 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 213 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 214 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 215 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 216 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 217 |
+
[-1, 1, Conv, [160, 1, 1]], # 186
|
| 218 |
+
[[-1, -11], 1, Shortcut, [1]], # 187
|
| 219 |
+
|
| 220 |
+
[-1, 1, DownC, [320]],
|
| 221 |
+
[[-1, 162], 1, Concat, [1]],
|
| 222 |
+
|
| 223 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 224 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 225 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 226 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 227 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 228 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 229 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 230 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 231 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 232 |
+
[-1, 1, Conv, [320, 1, 1]], # 199
|
| 233 |
+
[-11, 1, Conv, [256, 1, 1]],
|
| 234 |
+
[-12, 1, Conv, [256, 1, 1]],
|
| 235 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 236 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 237 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 238 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 239 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 240 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 241 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 242 |
+
[-1, 1, Conv, [320, 1, 1]], # 209
|
| 243 |
+
[[-1, -11], 1, Shortcut, [1]], # 210
|
| 244 |
+
|
| 245 |
+
[-1, 1, DownC, [480]],
|
| 246 |
+
[[-1, 137], 1, Concat, [1]],
|
| 247 |
+
|
| 248 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 249 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 250 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 251 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 252 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 253 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 254 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 255 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 256 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 257 |
+
[-1, 1, Conv, [480, 1, 1]], # 222
|
| 258 |
+
[-11, 1, Conv, [384, 1, 1]],
|
| 259 |
+
[-12, 1, Conv, [384, 1, 1]],
|
| 260 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 261 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 262 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 263 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 264 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 265 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 266 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 267 |
+
[-1, 1, Conv, [480, 1, 1]], # 232
|
| 268 |
+
[[-1, -11], 1, Shortcut, [1]], # 233
|
| 269 |
+
|
| 270 |
+
[-1, 1, DownC, [640]],
|
| 271 |
+
[[-1, 112], 1, Concat, [1]],
|
| 272 |
+
|
| 273 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 274 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 275 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 276 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 277 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 278 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 279 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 280 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 281 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 282 |
+
[-1, 1, Conv, [640, 1, 1]], # 245
|
| 283 |
+
[-11, 1, Conv, [512, 1, 1]],
|
| 284 |
+
[-12, 1, Conv, [512, 1, 1]],
|
| 285 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 286 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 287 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 288 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 289 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 290 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 291 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 292 |
+
[-1, 1, Conv, [640, 1, 1]], # 255
|
| 293 |
+
[[-1, -11], 1, Shortcut, [1]], # 256
|
| 294 |
+
|
| 295 |
+
[187, 1, Conv, [320, 3, 1]],
|
| 296 |
+
[210, 1, Conv, [640, 3, 1]],
|
| 297 |
+
[233, 1, Conv, [960, 3, 1]],
|
| 298 |
+
[256, 1, Conv, [1280, 3, 1]],
|
| 299 |
+
|
| 300 |
+
[[257,258,259,260], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 301 |
+
]
|
cfg/deploy/yolov7-tiny-silu.yaml
ADDED
|
@@ -0,0 +1,112 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [10,13, 16,30, 33,23] # P3/8
|
| 9 |
+
- [30,61, 62,45, 59,119] # P4/16
|
| 10 |
+
- [116,90, 156,198, 373,326] # P5/32
|
| 11 |
+
|
| 12 |
+
# YOLOv7-tiny backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 2]], # 0-P1/2
|
| 16 |
+
|
| 17 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P2/4
|
| 18 |
+
|
| 19 |
+
[-1, 1, Conv, [32, 1, 1]],
|
| 20 |
+
[-2, 1, Conv, [32, 1, 1]],
|
| 21 |
+
[-1, 1, Conv, [32, 3, 1]],
|
| 22 |
+
[-1, 1, Conv, [32, 3, 1]],
|
| 23 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 24 |
+
[-1, 1, Conv, [64, 1, 1]], # 7
|
| 25 |
+
|
| 26 |
+
[-1, 1, MP, []], # 8-P3/8
|
| 27 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 28 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 29 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 30 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 31 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 32 |
+
[-1, 1, Conv, [128, 1, 1]], # 14
|
| 33 |
+
|
| 34 |
+
[-1, 1, MP, []], # 15-P4/16
|
| 35 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 36 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 37 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 38 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 39 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 40 |
+
[-1, 1, Conv, [256, 1, 1]], # 21
|
| 41 |
+
|
| 42 |
+
[-1, 1, MP, []], # 22-P5/32
|
| 43 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 44 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 45 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 46 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 47 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 48 |
+
[-1, 1, Conv, [512, 1, 1]], # 28
|
| 49 |
+
]
|
| 50 |
+
|
| 51 |
+
# YOLOv7-tiny head
|
| 52 |
+
head:
|
| 53 |
+
[[-1, 1, Conv, [256, 1, 1]],
|
| 54 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 55 |
+
[-1, 1, SP, [5]],
|
| 56 |
+
[-2, 1, SP, [9]],
|
| 57 |
+
[-3, 1, SP, [13]],
|
| 58 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 59 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 60 |
+
[[-1, -7], 1, Concat, [1]],
|
| 61 |
+
[-1, 1, Conv, [256, 1, 1]], # 37
|
| 62 |
+
|
| 63 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 64 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 65 |
+
[21, 1, Conv, [128, 1, 1]], # route backbone P4
|
| 66 |
+
[[-1, -2], 1, Concat, [1]],
|
| 67 |
+
|
| 68 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 69 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 70 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 71 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 72 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 73 |
+
[-1, 1, Conv, [128, 1, 1]], # 47
|
| 74 |
+
|
| 75 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 76 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 77 |
+
[14, 1, Conv, [64, 1, 1]], # route backbone P3
|
| 78 |
+
[[-1, -2], 1, Concat, [1]],
|
| 79 |
+
|
| 80 |
+
[-1, 1, Conv, [32, 1, 1]],
|
| 81 |
+
[-2, 1, Conv, [32, 1, 1]],
|
| 82 |
+
[-1, 1, Conv, [32, 3, 1]],
|
| 83 |
+
[-1, 1, Conv, [32, 3, 1]],
|
| 84 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 85 |
+
[-1, 1, Conv, [64, 1, 1]], # 57
|
| 86 |
+
|
| 87 |
+
[-1, 1, Conv, [128, 3, 2]],
|
| 88 |
+
[[-1, 47], 1, Concat, [1]],
|
| 89 |
+
|
| 90 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 91 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 92 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 93 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 94 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 95 |
+
[-1, 1, Conv, [128, 1, 1]], # 65
|
| 96 |
+
|
| 97 |
+
[-1, 1, Conv, [256, 3, 2]],
|
| 98 |
+
[[-1, 37], 1, Concat, [1]],
|
| 99 |
+
|
| 100 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 101 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 102 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 103 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 104 |
+
[[-1, -2, -3, -4], 1, Concat, [1]],
|
| 105 |
+
[-1, 1, Conv, [256, 1, 1]], # 73
|
| 106 |
+
|
| 107 |
+
[57, 1, Conv, [128, 3, 1]],
|
| 108 |
+
[65, 1, Conv, [256, 3, 1]],
|
| 109 |
+
[73, 1, Conv, [512, 3, 1]],
|
| 110 |
+
|
| 111 |
+
[[74,75,76], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 112 |
+
]
|
cfg/deploy/yolov7-w6.yaml
ADDED
|
@@ -0,0 +1,158 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7-w6 backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args]
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [64, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, Conv, [128, 3, 2]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 27 |
+
[-1, 1, Conv, [128, 1, 1]], # 10
|
| 28 |
+
|
| 29 |
+
[-1, 1, Conv, [256, 3, 2]], # 11-P3/8
|
| 30 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 31 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 32 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 33 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 34 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 35 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 36 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 37 |
+
[-1, 1, Conv, [256, 1, 1]], # 19
|
| 38 |
+
|
| 39 |
+
[-1, 1, Conv, [512, 3, 2]], # 20-P4/16
|
| 40 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 41 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 42 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 43 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 44 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 45 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 46 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 47 |
+
[-1, 1, Conv, [512, 1, 1]], # 28
|
| 48 |
+
|
| 49 |
+
[-1, 1, Conv, [768, 3, 2]], # 29-P5/32
|
| 50 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 51 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 52 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 53 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 54 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 55 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 56 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 57 |
+
[-1, 1, Conv, [768, 1, 1]], # 37
|
| 58 |
+
|
| 59 |
+
[-1, 1, Conv, [1024, 3, 2]], # 38-P6/64
|
| 60 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 61 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 62 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 63 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 64 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 65 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 66 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 67 |
+
[-1, 1, Conv, [1024, 1, 1]], # 46
|
| 68 |
+
]
|
| 69 |
+
|
| 70 |
+
# yolov7-w6 head
|
| 71 |
+
head:
|
| 72 |
+
[[-1, 1, SPPCSPC, [512]], # 47
|
| 73 |
+
|
| 74 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 75 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 76 |
+
[37, 1, Conv, [384, 1, 1]], # route backbone P5
|
| 77 |
+
[[-1, -2], 1, Concat, [1]],
|
| 78 |
+
|
| 79 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 80 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 81 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 82 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 83 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 84 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 85 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 86 |
+
[-1, 1, Conv, [384, 1, 1]], # 59
|
| 87 |
+
|
| 88 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 89 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 90 |
+
[28, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 91 |
+
[[-1, -2], 1, Concat, [1]],
|
| 92 |
+
|
| 93 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 94 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 95 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 97 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 98 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 99 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 100 |
+
[-1, 1, Conv, [256, 1, 1]], # 71
|
| 101 |
+
|
| 102 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 103 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 104 |
+
[19, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 105 |
+
[[-1, -2], 1, Concat, [1]],
|
| 106 |
+
|
| 107 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 108 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 109 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 110 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 111 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 112 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 113 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 114 |
+
[-1, 1, Conv, [128, 1, 1]], # 83
|
| 115 |
+
|
| 116 |
+
[-1, 1, Conv, [256, 3, 2]],
|
| 117 |
+
[[-1, 71], 1, Concat, [1]], # cat
|
| 118 |
+
|
| 119 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 120 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 121 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 122 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 123 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 124 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 125 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 126 |
+
[-1, 1, Conv, [256, 1, 1]], # 93
|
| 127 |
+
|
| 128 |
+
[-1, 1, Conv, [384, 3, 2]],
|
| 129 |
+
[[-1, 59], 1, Concat, [1]], # cat
|
| 130 |
+
|
| 131 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 132 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 133 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 134 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 135 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 136 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 137 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 138 |
+
[-1, 1, Conv, [384, 1, 1]], # 103
|
| 139 |
+
|
| 140 |
+
[-1, 1, Conv, [512, 3, 2]],
|
| 141 |
+
[[-1, 47], 1, Concat, [1]], # cat
|
| 142 |
+
|
| 143 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 144 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 145 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 146 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 147 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 148 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 149 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 150 |
+
[-1, 1, Conv, [512, 1, 1]], # 113
|
| 151 |
+
|
| 152 |
+
[83, 1, Conv, [256, 3, 1]],
|
| 153 |
+
[93, 1, Conv, [512, 3, 1]],
|
| 154 |
+
[103, 1, Conv, [768, 3, 1]],
|
| 155 |
+
[113, 1, Conv, [1024, 3, 1]],
|
| 156 |
+
|
| 157 |
+
[[114,115,116,117], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 158 |
+
]
|
cfg/deploy/yolov7.yaml
ADDED
|
@@ -0,0 +1,140 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# yolov7 backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 1]], # 0
|
| 16 |
+
|
| 17 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
|
| 18 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 19 |
+
|
| 20 |
+
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
|
| 21 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 28 |
+
[-1, 1, Conv, [256, 1, 1]], # 11
|
| 29 |
+
|
| 30 |
+
[-1, 1, MP, []],
|
| 31 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 32 |
+
[-3, 1, Conv, [128, 1, 1]],
|
| 33 |
+
[-1, 1, Conv, [128, 3, 2]],
|
| 34 |
+
[[-1, -3], 1, Concat, [1]], # 16-P3/8
|
| 35 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 36 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 37 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 38 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 41 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 42 |
+
[-1, 1, Conv, [512, 1, 1]], # 24
|
| 43 |
+
|
| 44 |
+
[-1, 1, MP, []],
|
| 45 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 46 |
+
[-3, 1, Conv, [256, 1, 1]],
|
| 47 |
+
[-1, 1, Conv, [256, 3, 2]],
|
| 48 |
+
[[-1, -3], 1, Concat, [1]], # 29-P4/16
|
| 49 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 50 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 51 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 52 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 53 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 54 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 55 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 56 |
+
[-1, 1, Conv, [1024, 1, 1]], # 37
|
| 57 |
+
|
| 58 |
+
[-1, 1, MP, []],
|
| 59 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 60 |
+
[-3, 1, Conv, [512, 1, 1]],
|
| 61 |
+
[-1, 1, Conv, [512, 3, 2]],
|
| 62 |
+
[[-1, -3], 1, Concat, [1]], # 42-P5/32
|
| 63 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 64 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 65 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 66 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 67 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 68 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 69 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 70 |
+
[-1, 1, Conv, [1024, 1, 1]], # 50
|
| 71 |
+
]
|
| 72 |
+
|
| 73 |
+
# yolov7 head
|
| 74 |
+
head:
|
| 75 |
+
[[-1, 1, SPPCSPC, [512]], # 51
|
| 76 |
+
|
| 77 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 78 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 79 |
+
[37, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 80 |
+
[[-1, -2], 1, Concat, [1]],
|
| 81 |
+
|
| 82 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 83 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 84 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 85 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 86 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 87 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 88 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 89 |
+
[-1, 1, Conv, [256, 1, 1]], # 63
|
| 90 |
+
|
| 91 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 92 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 93 |
+
[24, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 94 |
+
[[-1, -2], 1, Concat, [1]],
|
| 95 |
+
|
| 96 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 97 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 98 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 99 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 100 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 101 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 102 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 103 |
+
[-1, 1, Conv, [128, 1, 1]], # 75
|
| 104 |
+
|
| 105 |
+
[-1, 1, MP, []],
|
| 106 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 107 |
+
[-3, 1, Conv, [128, 1, 1]],
|
| 108 |
+
[-1, 1, Conv, [128, 3, 2]],
|
| 109 |
+
[[-1, -3, 63], 1, Concat, [1]],
|
| 110 |
+
|
| 111 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 112 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 113 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 114 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 115 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 116 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 117 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 118 |
+
[-1, 1, Conv, [256, 1, 1]], # 88
|
| 119 |
+
|
| 120 |
+
[-1, 1, MP, []],
|
| 121 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 122 |
+
[-3, 1, Conv, [256, 1, 1]],
|
| 123 |
+
[-1, 1, Conv, [256, 3, 2]],
|
| 124 |
+
[[-1, -3, 51], 1, Concat, [1]],
|
| 125 |
+
|
| 126 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 127 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 128 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 129 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 130 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 131 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 132 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 133 |
+
[-1, 1, Conv, [512, 1, 1]], # 101
|
| 134 |
+
|
| 135 |
+
[75, 1, RepConv, [256, 3, 1]],
|
| 136 |
+
[88, 1, RepConv, [512, 3, 1]],
|
| 137 |
+
[101, 1, RepConv, [1024, 3, 1]],
|
| 138 |
+
|
| 139 |
+
[[102,103,104], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 140 |
+
]
|
cfg/deploy/yolov7x.yaml
ADDED
|
@@ -0,0 +1,156 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# yolov7x backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [40, 3, 1]], # 0
|
| 16 |
+
|
| 17 |
+
[-1, 1, Conv, [80, 3, 2]], # 1-P1/2
|
| 18 |
+
[-1, 1, Conv, [80, 3, 1]],
|
| 19 |
+
|
| 20 |
+
[-1, 1, Conv, [160, 3, 2]], # 3-P2/4
|
| 21 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 29 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 30 |
+
[-1, 1, Conv, [320, 1, 1]], # 13
|
| 31 |
+
|
| 32 |
+
[-1, 1, MP, []],
|
| 33 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 34 |
+
[-3, 1, Conv, [160, 1, 1]],
|
| 35 |
+
[-1, 1, Conv, [160, 3, 2]],
|
| 36 |
+
[[-1, -3], 1, Concat, [1]], # 18-P3/8
|
| 37 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 38 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 41 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 42 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 43 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 44 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 45 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 46 |
+
[-1, 1, Conv, [640, 1, 1]], # 28
|
| 47 |
+
|
| 48 |
+
[-1, 1, MP, []],
|
| 49 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 50 |
+
[-3, 1, Conv, [320, 1, 1]],
|
| 51 |
+
[-1, 1, Conv, [320, 3, 2]],
|
| 52 |
+
[[-1, -3], 1, Concat, [1]], # 33-P4/16
|
| 53 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 54 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 55 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 56 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 57 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 58 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 59 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 60 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 61 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 62 |
+
[-1, 1, Conv, [1280, 1, 1]], # 43
|
| 63 |
+
|
| 64 |
+
[-1, 1, MP, []],
|
| 65 |
+
[-1, 1, Conv, [640, 1, 1]],
|
| 66 |
+
[-3, 1, Conv, [640, 1, 1]],
|
| 67 |
+
[-1, 1, Conv, [640, 3, 2]],
|
| 68 |
+
[[-1, -3], 1, Concat, [1]], # 48-P5/32
|
| 69 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 70 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 71 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 72 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 73 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 74 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 75 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 76 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 77 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 78 |
+
[-1, 1, Conv, [1280, 1, 1]], # 58
|
| 79 |
+
]
|
| 80 |
+
|
| 81 |
+
# yolov7x head
|
| 82 |
+
head:
|
| 83 |
+
[[-1, 1, SPPCSPC, [640]], # 59
|
| 84 |
+
|
| 85 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 86 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 87 |
+
[43, 1, Conv, [320, 1, 1]], # route backbone P4
|
| 88 |
+
[[-1, -2], 1, Concat, [1]],
|
| 89 |
+
|
| 90 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 91 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 92 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 93 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 94 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 95 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 97 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 98 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 99 |
+
[-1, 1, Conv, [320, 1, 1]], # 73
|
| 100 |
+
|
| 101 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 102 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 103 |
+
[28, 1, Conv, [160, 1, 1]], # route backbone P3
|
| 104 |
+
[[-1, -2], 1, Concat, [1]],
|
| 105 |
+
|
| 106 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 107 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 108 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 109 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 110 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 111 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 112 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 113 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 114 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 115 |
+
[-1, 1, Conv, [160, 1, 1]], # 87
|
| 116 |
+
|
| 117 |
+
[-1, 1, MP, []],
|
| 118 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 119 |
+
[-3, 1, Conv, [160, 1, 1]],
|
| 120 |
+
[-1, 1, Conv, [160, 3, 2]],
|
| 121 |
+
[[-1, -3, 73], 1, Concat, [1]],
|
| 122 |
+
|
| 123 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 124 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 125 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 127 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 128 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 129 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 130 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 131 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 132 |
+
[-1, 1, Conv, [320, 1, 1]], # 102
|
| 133 |
+
|
| 134 |
+
[-1, 1, MP, []],
|
| 135 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 136 |
+
[-3, 1, Conv, [320, 1, 1]],
|
| 137 |
+
[-1, 1, Conv, [320, 3, 2]],
|
| 138 |
+
[[-1, -3, 59], 1, Concat, [1]],
|
| 139 |
+
|
| 140 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 141 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 142 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 143 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 144 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 145 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 146 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 147 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 148 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 149 |
+
[-1, 1, Conv, [640, 1, 1]], # 117
|
| 150 |
+
|
| 151 |
+
[87, 1, Conv, [320, 3, 1]],
|
| 152 |
+
[102, 1, Conv, [640, 3, 1]],
|
| 153 |
+
[117, 1, Conv, [1280, 3, 1]],
|
| 154 |
+
|
| 155 |
+
[[118,119,120], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 156 |
+
]
|
cfg/training/yolov7.yaml
ADDED
|
@@ -0,0 +1,140 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# yolov7 backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [32, 3, 1]], # 0
|
| 16 |
+
|
| 17 |
+
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
|
| 18 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 19 |
+
|
| 20 |
+
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
|
| 21 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 28 |
+
[-1, 1, Conv, [256, 1, 1]], # 11
|
| 29 |
+
|
| 30 |
+
[-1, 1, MP, []],
|
| 31 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 32 |
+
[-3, 1, Conv, [128, 1, 1]],
|
| 33 |
+
[-1, 1, Conv, [128, 3, 2]],
|
| 34 |
+
[[-1, -3], 1, Concat, [1]], # 16-P3/8
|
| 35 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 36 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 37 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 38 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 41 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 42 |
+
[-1, 1, Conv, [512, 1, 1]], # 24
|
| 43 |
+
|
| 44 |
+
[-1, 1, MP, []],
|
| 45 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 46 |
+
[-3, 1, Conv, [256, 1, 1]],
|
| 47 |
+
[-1, 1, Conv, [256, 3, 2]],
|
| 48 |
+
[[-1, -3], 1, Concat, [1]], # 29-P4/16
|
| 49 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 50 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 51 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 52 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 53 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 54 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 55 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 56 |
+
[-1, 1, Conv, [1024, 1, 1]], # 37
|
| 57 |
+
|
| 58 |
+
[-1, 1, MP, []],
|
| 59 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 60 |
+
[-3, 1, Conv, [512, 1, 1]],
|
| 61 |
+
[-1, 1, Conv, [512, 3, 2]],
|
| 62 |
+
[[-1, -3], 1, Concat, [1]], # 42-P5/32
|
| 63 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 64 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 65 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 66 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 67 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 68 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 69 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 70 |
+
[-1, 1, Conv, [1024, 1, 1]], # 50
|
| 71 |
+
]
|
| 72 |
+
|
| 73 |
+
# yolov7 head
|
| 74 |
+
head:
|
| 75 |
+
[[-1, 1, SPPCSPC, [512]], # 51
|
| 76 |
+
|
| 77 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 78 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 79 |
+
[37, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 80 |
+
[[-1, -2], 1, Concat, [1]],
|
| 81 |
+
|
| 82 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 83 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 84 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 85 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 86 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 87 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 88 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 89 |
+
[-1, 1, Conv, [256, 1, 1]], # 63
|
| 90 |
+
|
| 91 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 92 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 93 |
+
[24, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 94 |
+
[[-1, -2], 1, Concat, [1]],
|
| 95 |
+
|
| 96 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 97 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 98 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 99 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 100 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 101 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 102 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 103 |
+
[-1, 1, Conv, [128, 1, 1]], # 75
|
| 104 |
+
|
| 105 |
+
[-1, 1, MP, []],
|
| 106 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 107 |
+
[-3, 1, Conv, [128, 1, 1]],
|
| 108 |
+
[-1, 1, Conv, [128, 3, 2]],
|
| 109 |
+
[[-1, -3, 63], 1, Concat, [1]],
|
| 110 |
+
|
| 111 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 112 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 113 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 114 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 115 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 116 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 117 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 118 |
+
[-1, 1, Conv, [256, 1, 1]], # 88
|
| 119 |
+
|
| 120 |
+
[-1, 1, MP, []],
|
| 121 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 122 |
+
[-3, 1, Conv, [256, 1, 1]],
|
| 123 |
+
[-1, 1, Conv, [256, 3, 2]],
|
| 124 |
+
[[-1, -3, 51], 1, Concat, [1]],
|
| 125 |
+
|
| 126 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 127 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 128 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 129 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 130 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 131 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 132 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 133 |
+
[-1, 1, Conv, [512, 1, 1]], # 101
|
| 134 |
+
|
| 135 |
+
[75, 1, RepConv, [256, 3, 1]],
|
| 136 |
+
[88, 1, RepConv, [512, 3, 1]],
|
| 137 |
+
[101, 1, RepConv, [1024, 3, 1]],
|
| 138 |
+
|
| 139 |
+
[[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 140 |
+
]
|
cfg/training/yolov7d6.yaml
ADDED
|
@@ -0,0 +1,207 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7 backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args],
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [96, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, DownC, [192]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 29 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 30 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 31 |
+
[-1, 1, Conv, [192, 1, 1]], # 14
|
| 32 |
+
|
| 33 |
+
[-1, 1, DownC, [384]], # 15-P3/8
|
| 34 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 35 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 36 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 37 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 38 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 41 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 42 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 43 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 44 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 45 |
+
[-1, 1, Conv, [384, 1, 1]], # 27
|
| 46 |
+
|
| 47 |
+
[-1, 1, DownC, [768]], # 28-P4/16
|
| 48 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 49 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 50 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 51 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 52 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 53 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 54 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 55 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 56 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 57 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 58 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 59 |
+
[-1, 1, Conv, [768, 1, 1]], # 40
|
| 60 |
+
|
| 61 |
+
[-1, 1, DownC, [1152]], # 41-P5/32
|
| 62 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 63 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 64 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 65 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 66 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 67 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 68 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 69 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 70 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 71 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 72 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 73 |
+
[-1, 1, Conv, [1152, 1, 1]], # 53
|
| 74 |
+
|
| 75 |
+
[-1, 1, DownC, [1536]], # 54-P6/64
|
| 76 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 77 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 78 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 79 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 80 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 81 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 82 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 83 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 84 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 85 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 86 |
+
[[-1, -3, -5, -7, -9, -10], 1, Concat, [1]],
|
| 87 |
+
[-1, 1, Conv, [1536, 1, 1]], # 66
|
| 88 |
+
]
|
| 89 |
+
|
| 90 |
+
# yolov7 head
|
| 91 |
+
head:
|
| 92 |
+
[[-1, 1, SPPCSPC, [768]], # 67
|
| 93 |
+
|
| 94 |
+
[-1, 1, Conv, [576, 1, 1]],
|
| 95 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 96 |
+
[53, 1, Conv, [576, 1, 1]], # route backbone P5
|
| 97 |
+
[[-1, -2], 1, Concat, [1]],
|
| 98 |
+
|
| 99 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 100 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 101 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 102 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 103 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 104 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 105 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 106 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 107 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 108 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 109 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 110 |
+
[-1, 1, Conv, [576, 1, 1]], # 83
|
| 111 |
+
|
| 112 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 113 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 114 |
+
[40, 1, Conv, [384, 1, 1]], # route backbone P4
|
| 115 |
+
[[-1, -2], 1, Concat, [1]],
|
| 116 |
+
|
| 117 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 118 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 119 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 120 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 121 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 122 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 123 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 124 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 125 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 127 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 128 |
+
[-1, 1, Conv, [384, 1, 1]], # 99
|
| 129 |
+
|
| 130 |
+
[-1, 1, Conv, [192, 1, 1]],
|
| 131 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 132 |
+
[27, 1, Conv, [192, 1, 1]], # route backbone P3
|
| 133 |
+
[[-1, -2], 1, Concat, [1]],
|
| 134 |
+
|
| 135 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 136 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 137 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 138 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 139 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 140 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 141 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 142 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 143 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 144 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 145 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 146 |
+
[-1, 1, Conv, [192, 1, 1]], # 115
|
| 147 |
+
|
| 148 |
+
[-1, 1, DownC, [384]],
|
| 149 |
+
[[-1, 99], 1, Concat, [1]],
|
| 150 |
+
|
| 151 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 152 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 153 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 154 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 155 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 156 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 157 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 158 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 159 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 160 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 161 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 162 |
+
[-1, 1, Conv, [384, 1, 1]], # 129
|
| 163 |
+
|
| 164 |
+
[-1, 1, DownC, [576]],
|
| 165 |
+
[[-1, 83], 1, Concat, [1]],
|
| 166 |
+
|
| 167 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 168 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 169 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 170 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 171 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 172 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 173 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 174 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 175 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 176 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 177 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 178 |
+
[-1, 1, Conv, [576, 1, 1]], # 143
|
| 179 |
+
|
| 180 |
+
[-1, 1, DownC, [768]],
|
| 181 |
+
[[-1, 67], 1, Concat, [1]],
|
| 182 |
+
|
| 183 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 184 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 185 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 186 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 187 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 188 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 189 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 190 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 191 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 192 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 193 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8, -9, -10], 1, Concat, [1]],
|
| 194 |
+
[-1, 1, Conv, [768, 1, 1]], # 157
|
| 195 |
+
|
| 196 |
+
[115, 1, Conv, [384, 3, 1]],
|
| 197 |
+
[129, 1, Conv, [768, 3, 1]],
|
| 198 |
+
[143, 1, Conv, [1152, 3, 1]],
|
| 199 |
+
[157, 1, Conv, [1536, 3, 1]],
|
| 200 |
+
|
| 201 |
+
[115, 1, Conv, [384, 3, 1]],
|
| 202 |
+
[99, 1, Conv, [768, 3, 1]],
|
| 203 |
+
[83, 1, Conv, [1152, 3, 1]],
|
| 204 |
+
[67, 1, Conv, [1536, 3, 1]],
|
| 205 |
+
|
| 206 |
+
[[158,159,160,161,162,163,164,165], 1, IAuxDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 207 |
+
]
|
cfg/training/yolov7e6.yaml
ADDED
|
@@ -0,0 +1,185 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7 backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args],
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [80, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, DownC, [160]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 29 |
+
[-1, 1, Conv, [160, 1, 1]], # 12
|
| 30 |
+
|
| 31 |
+
[-1, 1, DownC, [320]], # 13-P3/8
|
| 32 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 33 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 34 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 35 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 36 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 37 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 38 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 41 |
+
[-1, 1, Conv, [320, 1, 1]], # 23
|
| 42 |
+
|
| 43 |
+
[-1, 1, DownC, [640]], # 24-P4/16
|
| 44 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 45 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 46 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 47 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 48 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 49 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 50 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 51 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 52 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 53 |
+
[-1, 1, Conv, [640, 1, 1]], # 34
|
| 54 |
+
|
| 55 |
+
[-1, 1, DownC, [960]], # 35-P5/32
|
| 56 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 57 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 58 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 59 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 60 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 61 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 62 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 63 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 64 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 65 |
+
[-1, 1, Conv, [960, 1, 1]], # 45
|
| 66 |
+
|
| 67 |
+
[-1, 1, DownC, [1280]], # 46-P6/64
|
| 68 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 69 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 70 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 71 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 72 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 73 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 74 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 75 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 76 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 77 |
+
[-1, 1, Conv, [1280, 1, 1]], # 56
|
| 78 |
+
]
|
| 79 |
+
|
| 80 |
+
# yolov7 head
|
| 81 |
+
head:
|
| 82 |
+
[[-1, 1, SPPCSPC, [640]], # 57
|
| 83 |
+
|
| 84 |
+
[-1, 1, Conv, [480, 1, 1]],
|
| 85 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 86 |
+
[45, 1, Conv, [480, 1, 1]], # route backbone P5
|
| 87 |
+
[[-1, -2], 1, Concat, [1]],
|
| 88 |
+
|
| 89 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 90 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 91 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 92 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 93 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 94 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 95 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 97 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 98 |
+
[-1, 1, Conv, [480, 1, 1]], # 71
|
| 99 |
+
|
| 100 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 101 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 102 |
+
[34, 1, Conv, [320, 1, 1]], # route backbone P4
|
| 103 |
+
[[-1, -2], 1, Concat, [1]],
|
| 104 |
+
|
| 105 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 106 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 107 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 108 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 109 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 110 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 111 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 112 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 113 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 114 |
+
[-1, 1, Conv, [320, 1, 1]], # 85
|
| 115 |
+
|
| 116 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 117 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 118 |
+
[23, 1, Conv, [160, 1, 1]], # route backbone P3
|
| 119 |
+
[[-1, -2], 1, Concat, [1]],
|
| 120 |
+
|
| 121 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 122 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 123 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 124 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 125 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 127 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 128 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 129 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 130 |
+
[-1, 1, Conv, [160, 1, 1]], # 99
|
| 131 |
+
|
| 132 |
+
[-1, 1, DownC, [320]],
|
| 133 |
+
[[-1, 85], 1, Concat, [1]],
|
| 134 |
+
|
| 135 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 136 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 137 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 138 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 139 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 140 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 141 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 142 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 143 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 144 |
+
[-1, 1, Conv, [320, 1, 1]], # 111
|
| 145 |
+
|
| 146 |
+
[-1, 1, DownC, [480]],
|
| 147 |
+
[[-1, 71], 1, Concat, [1]],
|
| 148 |
+
|
| 149 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 150 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 151 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 152 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 153 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 154 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 155 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 156 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 157 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 158 |
+
[-1, 1, Conv, [480, 1, 1]], # 123
|
| 159 |
+
|
| 160 |
+
[-1, 1, DownC, [640]],
|
| 161 |
+
[[-1, 57], 1, Concat, [1]],
|
| 162 |
+
|
| 163 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 164 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 165 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 166 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 167 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 168 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 169 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 170 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 171 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 172 |
+
[-1, 1, Conv, [640, 1, 1]], # 135
|
| 173 |
+
|
| 174 |
+
[99, 1, Conv, [320, 3, 1]],
|
| 175 |
+
[111, 1, Conv, [640, 3, 1]],
|
| 176 |
+
[123, 1, Conv, [960, 3, 1]],
|
| 177 |
+
[135, 1, Conv, [1280, 3, 1]],
|
| 178 |
+
|
| 179 |
+
[99, 1, Conv, [320, 3, 1]],
|
| 180 |
+
[85, 1, Conv, [640, 3, 1]],
|
| 181 |
+
[71, 1, Conv, [960, 3, 1]],
|
| 182 |
+
[57, 1, Conv, [1280, 3, 1]],
|
| 183 |
+
|
| 184 |
+
[[136,137,138,139,140,141,142,143], 1, IAuxDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 185 |
+
]
|
cfg/training/yolov7e6e.yaml
ADDED
|
@@ -0,0 +1,306 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7 backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args],
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [80, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, DownC, [160]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 29 |
+
[-1, 1, Conv, [160, 1, 1]], # 12
|
| 30 |
+
[-11, 1, Conv, [64, 1, 1]],
|
| 31 |
+
[-12, 1, Conv, [64, 1, 1]],
|
| 32 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 33 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 34 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 35 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 36 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 37 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 38 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 39 |
+
[-1, 1, Conv, [160, 1, 1]], # 22
|
| 40 |
+
[[-1, -11], 1, Shortcut, [1]], # 23
|
| 41 |
+
|
| 42 |
+
[-1, 1, DownC, [320]], # 24-P3/8
|
| 43 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 44 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 45 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 46 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 47 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 48 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 49 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 50 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 51 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 52 |
+
[-1, 1, Conv, [320, 1, 1]], # 34
|
| 53 |
+
[-11, 1, Conv, [128, 1, 1]],
|
| 54 |
+
[-12, 1, Conv, [128, 1, 1]],
|
| 55 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 56 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 57 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 58 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 59 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 60 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 61 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 62 |
+
[-1, 1, Conv, [320, 1, 1]], # 44
|
| 63 |
+
[[-1, -11], 1, Shortcut, [1]], # 45
|
| 64 |
+
|
| 65 |
+
[-1, 1, DownC, [640]], # 46-P4/16
|
| 66 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 67 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 68 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 69 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 70 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 71 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 72 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 73 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 74 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 75 |
+
[-1, 1, Conv, [640, 1, 1]], # 56
|
| 76 |
+
[-11, 1, Conv, [256, 1, 1]],
|
| 77 |
+
[-12, 1, Conv, [256, 1, 1]],
|
| 78 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 79 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 80 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 81 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 82 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 83 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 84 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 85 |
+
[-1, 1, Conv, [640, 1, 1]], # 66
|
| 86 |
+
[[-1, -11], 1, Shortcut, [1]], # 67
|
| 87 |
+
|
| 88 |
+
[-1, 1, DownC, [960]], # 68-P5/32
|
| 89 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 90 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 91 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 92 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 93 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 94 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 95 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 97 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 98 |
+
[-1, 1, Conv, [960, 1, 1]], # 78
|
| 99 |
+
[-11, 1, Conv, [384, 1, 1]],
|
| 100 |
+
[-12, 1, Conv, [384, 1, 1]],
|
| 101 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 102 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 103 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 104 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 105 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 106 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 107 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 108 |
+
[-1, 1, Conv, [960, 1, 1]], # 88
|
| 109 |
+
[[-1, -11], 1, Shortcut, [1]], # 89
|
| 110 |
+
|
| 111 |
+
[-1, 1, DownC, [1280]], # 90-P6/64
|
| 112 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 113 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 114 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 115 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 116 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 117 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 118 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 119 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 120 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 121 |
+
[-1, 1, Conv, [1280, 1, 1]], # 100
|
| 122 |
+
[-11, 1, Conv, [512, 1, 1]],
|
| 123 |
+
[-12, 1, Conv, [512, 1, 1]],
|
| 124 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 125 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 127 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 128 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 129 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 130 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 131 |
+
[-1, 1, Conv, [1280, 1, 1]], # 110
|
| 132 |
+
[[-1, -11], 1, Shortcut, [1]], # 111
|
| 133 |
+
]
|
| 134 |
+
|
| 135 |
+
# yolov7 head
|
| 136 |
+
head:
|
| 137 |
+
[[-1, 1, SPPCSPC, [640]], # 112
|
| 138 |
+
|
| 139 |
+
[-1, 1, Conv, [480, 1, 1]],
|
| 140 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 141 |
+
[89, 1, Conv, [480, 1, 1]], # route backbone P5
|
| 142 |
+
[[-1, -2], 1, Concat, [1]],
|
| 143 |
+
|
| 144 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 145 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 146 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 147 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 148 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 149 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 150 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 151 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 152 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 153 |
+
[-1, 1, Conv, [480, 1, 1]], # 126
|
| 154 |
+
[-11, 1, Conv, [384, 1, 1]],
|
| 155 |
+
[-12, 1, Conv, [384, 1, 1]],
|
| 156 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 157 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 158 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 159 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 160 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 161 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 162 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 163 |
+
[-1, 1, Conv, [480, 1, 1]], # 136
|
| 164 |
+
[[-1, -11], 1, Shortcut, [1]], # 137
|
| 165 |
+
|
| 166 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 167 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 168 |
+
[67, 1, Conv, [320, 1, 1]], # route backbone P4
|
| 169 |
+
[[-1, -2], 1, Concat, [1]],
|
| 170 |
+
|
| 171 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 172 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 173 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 174 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 175 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 176 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 177 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 178 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 179 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 180 |
+
[-1, 1, Conv, [320, 1, 1]], # 151
|
| 181 |
+
[-11, 1, Conv, [256, 1, 1]],
|
| 182 |
+
[-12, 1, Conv, [256, 1, 1]],
|
| 183 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 184 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 185 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 186 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 187 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 188 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 189 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 190 |
+
[-1, 1, Conv, [320, 1, 1]], # 161
|
| 191 |
+
[[-1, -11], 1, Shortcut, [1]], # 162
|
| 192 |
+
|
| 193 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 194 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 195 |
+
[45, 1, Conv, [160, 1, 1]], # route backbone P3
|
| 196 |
+
[[-1, -2], 1, Concat, [1]],
|
| 197 |
+
|
| 198 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 199 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 200 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 201 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 202 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 203 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 204 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 205 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 206 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 207 |
+
[-1, 1, Conv, [160, 1, 1]], # 176
|
| 208 |
+
[-11, 1, Conv, [128, 1, 1]],
|
| 209 |
+
[-12, 1, Conv, [128, 1, 1]],
|
| 210 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 211 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 212 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 213 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 214 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 215 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 216 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 217 |
+
[-1, 1, Conv, [160, 1, 1]], # 186
|
| 218 |
+
[[-1, -11], 1, Shortcut, [1]], # 187
|
| 219 |
+
|
| 220 |
+
[-1, 1, DownC, [320]],
|
| 221 |
+
[[-1, 162], 1, Concat, [1]],
|
| 222 |
+
|
| 223 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 224 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 225 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 226 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 227 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 228 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 229 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 230 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 231 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 232 |
+
[-1, 1, Conv, [320, 1, 1]], # 199
|
| 233 |
+
[-11, 1, Conv, [256, 1, 1]],
|
| 234 |
+
[-12, 1, Conv, [256, 1, 1]],
|
| 235 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 236 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 237 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 238 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 239 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 240 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 241 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 242 |
+
[-1, 1, Conv, [320, 1, 1]], # 209
|
| 243 |
+
[[-1, -11], 1, Shortcut, [1]], # 210
|
| 244 |
+
|
| 245 |
+
[-1, 1, DownC, [480]],
|
| 246 |
+
[[-1, 137], 1, Concat, [1]],
|
| 247 |
+
|
| 248 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 249 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 250 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 251 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 252 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 253 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 254 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 255 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 256 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 257 |
+
[-1, 1, Conv, [480, 1, 1]], # 222
|
| 258 |
+
[-11, 1, Conv, [384, 1, 1]],
|
| 259 |
+
[-12, 1, Conv, [384, 1, 1]],
|
| 260 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 261 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 262 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 263 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 264 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 265 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 266 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 267 |
+
[-1, 1, Conv, [480, 1, 1]], # 232
|
| 268 |
+
[[-1, -11], 1, Shortcut, [1]], # 233
|
| 269 |
+
|
| 270 |
+
[-1, 1, DownC, [640]],
|
| 271 |
+
[[-1, 112], 1, Concat, [1]],
|
| 272 |
+
|
| 273 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 274 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 275 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 276 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 277 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 278 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 279 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 280 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 281 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 282 |
+
[-1, 1, Conv, [640, 1, 1]], # 245
|
| 283 |
+
[-11, 1, Conv, [512, 1, 1]],
|
| 284 |
+
[-12, 1, Conv, [512, 1, 1]],
|
| 285 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 286 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 287 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 288 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 289 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 290 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 291 |
+
[[-1, -2, -3, -4, -5, -6, -7, -8], 1, Concat, [1]],
|
| 292 |
+
[-1, 1, Conv, [640, 1, 1]], # 255
|
| 293 |
+
[[-1, -11], 1, Shortcut, [1]], # 256
|
| 294 |
+
|
| 295 |
+
[187, 1, Conv, [320, 3, 1]],
|
| 296 |
+
[210, 1, Conv, [640, 3, 1]],
|
| 297 |
+
[233, 1, Conv, [960, 3, 1]],
|
| 298 |
+
[256, 1, Conv, [1280, 3, 1]],
|
| 299 |
+
|
| 300 |
+
[186, 1, Conv, [320, 3, 1]],
|
| 301 |
+
[161, 1, Conv, [640, 3, 1]],
|
| 302 |
+
[136, 1, Conv, [960, 3, 1]],
|
| 303 |
+
[112, 1, Conv, [1280, 3, 1]],
|
| 304 |
+
|
| 305 |
+
[[257,258,259,260,261,262,263,264], 1, IAuxDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 306 |
+
]
|
cfg/training/yolov7w6.yaml
ADDED
|
@@ -0,0 +1,163 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [ 19,27, 44,40, 38,94 ] # P3/8
|
| 9 |
+
- [ 96,68, 86,152, 180,137 ] # P4/16
|
| 10 |
+
- [ 140,301, 303,264, 238,542 ] # P5/32
|
| 11 |
+
- [ 436,615, 739,380, 925,792 ] # P6/64
|
| 12 |
+
|
| 13 |
+
# yolov7 backbone
|
| 14 |
+
backbone:
|
| 15 |
+
# [from, number, module, args]
|
| 16 |
+
[[-1, 1, ReOrg, []], # 0
|
| 17 |
+
[-1, 1, Conv, [64, 3, 1]], # 1-P1/2
|
| 18 |
+
|
| 19 |
+
[-1, 1, Conv, [128, 3, 2]], # 2-P2/4
|
| 20 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 21 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 27 |
+
[-1, 1, Conv, [128, 1, 1]], # 10
|
| 28 |
+
|
| 29 |
+
[-1, 1, Conv, [256, 3, 2]], # 11-P3/8
|
| 30 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 31 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 32 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 33 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 34 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 35 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 36 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 37 |
+
[-1, 1, Conv, [256, 1, 1]], # 19
|
| 38 |
+
|
| 39 |
+
[-1, 1, Conv, [512, 3, 2]], # 20-P4/16
|
| 40 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 41 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 42 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 43 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 44 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 45 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 46 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 47 |
+
[-1, 1, Conv, [512, 1, 1]], # 28
|
| 48 |
+
|
| 49 |
+
[-1, 1, Conv, [768, 3, 2]], # 29-P5/32
|
| 50 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 51 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 52 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 53 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 54 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 55 |
+
[-1, 1, Conv, [384, 3, 1]],
|
| 56 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 57 |
+
[-1, 1, Conv, [768, 1, 1]], # 37
|
| 58 |
+
|
| 59 |
+
[-1, 1, Conv, [1024, 3, 2]], # 38-P6/64
|
| 60 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 61 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 62 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 63 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 64 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 65 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 66 |
+
[[-1, -3, -5, -6], 1, Concat, [1]],
|
| 67 |
+
[-1, 1, Conv, [1024, 1, 1]], # 46
|
| 68 |
+
]
|
| 69 |
+
|
| 70 |
+
# yolov7 head
|
| 71 |
+
head:
|
| 72 |
+
[[-1, 1, SPPCSPC, [512]], # 47
|
| 73 |
+
|
| 74 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 75 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 76 |
+
[37, 1, Conv, [384, 1, 1]], # route backbone P5
|
| 77 |
+
[[-1, -2], 1, Concat, [1]],
|
| 78 |
+
|
| 79 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 80 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 81 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 82 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 83 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 84 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 85 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 86 |
+
[-1, 1, Conv, [384, 1, 1]], # 59
|
| 87 |
+
|
| 88 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 89 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 90 |
+
[28, 1, Conv, [256, 1, 1]], # route backbone P4
|
| 91 |
+
[[-1, -2], 1, Concat, [1]],
|
| 92 |
+
|
| 93 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 94 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 95 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 97 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 98 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 99 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 100 |
+
[-1, 1, Conv, [256, 1, 1]], # 71
|
| 101 |
+
|
| 102 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 103 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 104 |
+
[19, 1, Conv, [128, 1, 1]], # route backbone P3
|
| 105 |
+
[[-1, -2], 1, Concat, [1]],
|
| 106 |
+
|
| 107 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 108 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 109 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 110 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 111 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 112 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 113 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 114 |
+
[-1, 1, Conv, [128, 1, 1]], # 83
|
| 115 |
+
|
| 116 |
+
[-1, 1, Conv, [256, 3, 2]],
|
| 117 |
+
[[-1, 71], 1, Concat, [1]], # cat
|
| 118 |
+
|
| 119 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 120 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 121 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 122 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 123 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 124 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 125 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 126 |
+
[-1, 1, Conv, [256, 1, 1]], # 93
|
| 127 |
+
|
| 128 |
+
[-1, 1, Conv, [384, 3, 2]],
|
| 129 |
+
[[-1, 59], 1, Concat, [1]], # cat
|
| 130 |
+
|
| 131 |
+
[-1, 1, Conv, [384, 1, 1]],
|
| 132 |
+
[-2, 1, Conv, [384, 1, 1]],
|
| 133 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 134 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 135 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 136 |
+
[-1, 1, Conv, [192, 3, 1]],
|
| 137 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 138 |
+
[-1, 1, Conv, [384, 1, 1]], # 103
|
| 139 |
+
|
| 140 |
+
[-1, 1, Conv, [512, 3, 2]],
|
| 141 |
+
[[-1, 47], 1, Concat, [1]], # cat
|
| 142 |
+
|
| 143 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 144 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 145 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 146 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 147 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 148 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 149 |
+
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
|
| 150 |
+
[-1, 1, Conv, [512, 1, 1]], # 113
|
| 151 |
+
|
| 152 |
+
[83, 1, Conv, [256, 3, 1]],
|
| 153 |
+
[93, 1, Conv, [512, 3, 1]],
|
| 154 |
+
[103, 1, Conv, [768, 3, 1]],
|
| 155 |
+
[113, 1, Conv, [1024, 3, 1]],
|
| 156 |
+
|
| 157 |
+
[83, 1, Conv, [320, 3, 1]],
|
| 158 |
+
[71, 1, Conv, [640, 3, 1]],
|
| 159 |
+
[59, 1, Conv, [960, 3, 1]],
|
| 160 |
+
[47, 1, Conv, [1280, 3, 1]],
|
| 161 |
+
|
| 162 |
+
[[114,115,116,117,118,119,120,121], 1, IAuxDetect, [nc, anchors]], # Detect(P3, P4, P5, P6)
|
| 163 |
+
]
|
cfg/training/yolov7x.yaml
ADDED
|
@@ -0,0 +1,156 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# parameters
|
| 2 |
+
nc: 80 # number of classes
|
| 3 |
+
depth_multiple: 1.0 # model depth multiple
|
| 4 |
+
width_multiple: 1.0 # layer channel multiple
|
| 5 |
+
|
| 6 |
+
# anchors
|
| 7 |
+
anchors:
|
| 8 |
+
- [12,16, 19,36, 40,28] # P3/8
|
| 9 |
+
- [36,75, 76,55, 72,146] # P4/16
|
| 10 |
+
- [142,110, 192,243, 459,401] # P5/32
|
| 11 |
+
|
| 12 |
+
# yolov7 backbone
|
| 13 |
+
backbone:
|
| 14 |
+
# [from, number, module, args]
|
| 15 |
+
[[-1, 1, Conv, [40, 3, 1]], # 0
|
| 16 |
+
|
| 17 |
+
[-1, 1, Conv, [80, 3, 2]], # 1-P1/2
|
| 18 |
+
[-1, 1, Conv, [80, 3, 1]],
|
| 19 |
+
|
| 20 |
+
[-1, 1, Conv, [160, 3, 2]], # 3-P2/4
|
| 21 |
+
[-1, 1, Conv, [64, 1, 1]],
|
| 22 |
+
[-2, 1, Conv, [64, 1, 1]],
|
| 23 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 24 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 25 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 26 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 27 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 28 |
+
[-1, 1, Conv, [64, 3, 1]],
|
| 29 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 30 |
+
[-1, 1, Conv, [320, 1, 1]], # 13
|
| 31 |
+
|
| 32 |
+
[-1, 1, MP, []],
|
| 33 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 34 |
+
[-3, 1, Conv, [160, 1, 1]],
|
| 35 |
+
[-1, 1, Conv, [160, 3, 2]],
|
| 36 |
+
[[-1, -3], 1, Concat, [1]], # 18-P3/8
|
| 37 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 38 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 39 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 40 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 41 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 42 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 43 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 44 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 45 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 46 |
+
[-1, 1, Conv, [640, 1, 1]], # 28
|
| 47 |
+
|
| 48 |
+
[-1, 1, MP, []],
|
| 49 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 50 |
+
[-3, 1, Conv, [320, 1, 1]],
|
| 51 |
+
[-1, 1, Conv, [320, 3, 2]],
|
| 52 |
+
[[-1, -3], 1, Concat, [1]], # 33-P4/16
|
| 53 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 54 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 55 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 56 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 57 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 58 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 59 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 60 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 61 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 62 |
+
[-1, 1, Conv, [1280, 1, 1]], # 43
|
| 63 |
+
|
| 64 |
+
[-1, 1, MP, []],
|
| 65 |
+
[-1, 1, Conv, [640, 1, 1]],
|
| 66 |
+
[-3, 1, Conv, [640, 1, 1]],
|
| 67 |
+
[-1, 1, Conv, [640, 3, 2]],
|
| 68 |
+
[[-1, -3], 1, Concat, [1]], # 48-P5/32
|
| 69 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 70 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 71 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 72 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 73 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 74 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 75 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 76 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 77 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 78 |
+
[-1, 1, Conv, [1280, 1, 1]], # 58
|
| 79 |
+
]
|
| 80 |
+
|
| 81 |
+
# yolov7 head
|
| 82 |
+
head:
|
| 83 |
+
[[-1, 1, SPPCSPC, [640]], # 59
|
| 84 |
+
|
| 85 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 86 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 87 |
+
[43, 1, Conv, [320, 1, 1]], # route backbone P4
|
| 88 |
+
[[-1, -2], 1, Concat, [1]],
|
| 89 |
+
|
| 90 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 91 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 92 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 93 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 94 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 95 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 96 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 97 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 98 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 99 |
+
[-1, 1, Conv, [320, 1, 1]], # 73
|
| 100 |
+
|
| 101 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 102 |
+
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
|
| 103 |
+
[28, 1, Conv, [160, 1, 1]], # route backbone P3
|
| 104 |
+
[[-1, -2], 1, Concat, [1]],
|
| 105 |
+
|
| 106 |
+
[-1, 1, Conv, [128, 1, 1]],
|
| 107 |
+
[-2, 1, Conv, [128, 1, 1]],
|
| 108 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 109 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 110 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 111 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 112 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 113 |
+
[-1, 1, Conv, [128, 3, 1]],
|
| 114 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 115 |
+
[-1, 1, Conv, [160, 1, 1]], # 87
|
| 116 |
+
|
| 117 |
+
[-1, 1, MP, []],
|
| 118 |
+
[-1, 1, Conv, [160, 1, 1]],
|
| 119 |
+
[-3, 1, Conv, [160, 1, 1]],
|
| 120 |
+
[-1, 1, Conv, [160, 3, 2]],
|
| 121 |
+
[[-1, -3, 73], 1, Concat, [1]],
|
| 122 |
+
|
| 123 |
+
[-1, 1, Conv, [256, 1, 1]],
|
| 124 |
+
[-2, 1, Conv, [256, 1, 1]],
|
| 125 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 126 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 127 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 128 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 129 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 130 |
+
[-1, 1, Conv, [256, 3, 1]],
|
| 131 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 132 |
+
[-1, 1, Conv, [320, 1, 1]], # 102
|
| 133 |
+
|
| 134 |
+
[-1, 1, MP, []],
|
| 135 |
+
[-1, 1, Conv, [320, 1, 1]],
|
| 136 |
+
[-3, 1, Conv, [320, 1, 1]],
|
| 137 |
+
[-1, 1, Conv, [320, 3, 2]],
|
| 138 |
+
[[-1, -3, 59], 1, Concat, [1]],
|
| 139 |
+
|
| 140 |
+
[-1, 1, Conv, [512, 1, 1]],
|
| 141 |
+
[-2, 1, Conv, [512, 1, 1]],
|
| 142 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 143 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 144 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 145 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 146 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 147 |
+
[-1, 1, Conv, [512, 3, 1]],
|
| 148 |
+
[[-1, -3, -5, -7, -8], 1, Concat, [1]],
|
| 149 |
+
[-1, 1, Conv, [640, 1, 1]], # 117
|
| 150 |
+
|
| 151 |
+
[87, 1, Conv, [320, 3, 1]],
|
| 152 |
+
[102, 1, Conv, [640, 3, 1]],
|
| 153 |
+
[117, 1, Conv, [1280, 3, 1]],
|
| 154 |
+
|
| 155 |
+
[[118,119,120], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
|
| 156 |
+
]
|
data/coco.yaml
ADDED
|
@@ -0,0 +1,23 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# COCO 2017 dataset http://cocodataset.org
|
| 2 |
+
|
| 3 |
+
# download command/URL (optional)
|
| 4 |
+
download: bash ./scripts/get_coco.sh
|
| 5 |
+
|
| 6 |
+
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
|
| 7 |
+
train: ./coco/train2017.txt # 118287 images
|
| 8 |
+
val: ./coco/val2017.txt # 5000 images
|
| 9 |
+
test: ./coco/test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
|
| 10 |
+
|
| 11 |
+
# number of classes
|
| 12 |
+
nc: 80
|
| 13 |
+
|
| 14 |
+
# class names
|
| 15 |
+
names: [ 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
|
| 16 |
+
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
|
| 17 |
+
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
|
| 18 |
+
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
|
| 19 |
+
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
|
| 20 |
+
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
|
| 21 |
+
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
|
| 22 |
+
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
|
| 23 |
+
'hair drier', 'toothbrush' ]
|
data/hyp.scratch.p5.yaml
ADDED
|
@@ -0,0 +1,29 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
|
| 2 |
+
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
|
| 3 |
+
momentum: 0.937 # SGD momentum/Adam beta1
|
| 4 |
+
weight_decay: 0.0005 # optimizer weight decay 5e-4
|
| 5 |
+
warmup_epochs: 3.0 # warmup epochs (fractions ok)
|
| 6 |
+
warmup_momentum: 0.8 # warmup initial momentum
|
| 7 |
+
warmup_bias_lr: 0.1 # warmup initial bias lr
|
| 8 |
+
box: 0.05 # box loss gain
|
| 9 |
+
cls: 0.3 # cls loss gain
|
| 10 |
+
cls_pw: 1.0 # cls BCELoss positive_weight
|
| 11 |
+
obj: 0.7 # obj loss gain (scale with pixels)
|
| 12 |
+
obj_pw: 1.0 # obj BCELoss positive_weight
|
| 13 |
+
iou_t: 0.20 # IoU training threshold
|
| 14 |
+
anchor_t: 4.0 # anchor-multiple threshold
|
| 15 |
+
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
|
| 16 |
+
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
|
| 17 |
+
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
|
| 18 |
+
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
|
| 19 |
+
degrees: 0.0 # image rotation (+/- deg)
|
| 20 |
+
translate: 0.2 # image translation (+/- fraction)
|
| 21 |
+
scale: 0.9 # image scale (+/- gain)
|
| 22 |
+
shear: 0.0 # image shear (+/- deg)
|
| 23 |
+
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
|
| 24 |
+
flipud: 0.0 # image flip up-down (probability)
|
| 25 |
+
fliplr: 0.5 # image flip left-right (probability)
|
| 26 |
+
mosaic: 1.0 # image mosaic (probability)
|
| 27 |
+
mixup: 0.15 # image mixup (probability)
|
| 28 |
+
copy_paste: 0.0 # image copy paste (probability)
|
| 29 |
+
paste_in: 0.15 # image copy paste (probability)
|
data/hyp.scratch.p6.yaml
ADDED
|
@@ -0,0 +1,29 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
|
| 2 |
+
lrf: 0.2 # final OneCycleLR learning rate (lr0 * lrf)
|
| 3 |
+
momentum: 0.937 # SGD momentum/Adam beta1
|
| 4 |
+
weight_decay: 0.0005 # optimizer weight decay 5e-4
|
| 5 |
+
warmup_epochs: 3.0 # warmup epochs (fractions ok)
|
| 6 |
+
warmup_momentum: 0.8 # warmup initial momentum
|
| 7 |
+
warmup_bias_lr: 0.1 # warmup initial bias lr
|
| 8 |
+
box: 0.05 # box loss gain
|
| 9 |
+
cls: 0.3 # cls loss gain
|
| 10 |
+
cls_pw: 1.0 # cls BCELoss positive_weight
|
| 11 |
+
obj: 0.7 # obj loss gain (scale with pixels)
|
| 12 |
+
obj_pw: 1.0 # obj BCELoss positive_weight
|
| 13 |
+
iou_t: 0.20 # IoU training threshold
|
| 14 |
+
anchor_t: 4.0 # anchor-multiple threshold
|
| 15 |
+
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
|
| 16 |
+
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
|
| 17 |
+
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
|
| 18 |
+
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
|
| 19 |
+
degrees: 0.0 # image rotation (+/- deg)
|
| 20 |
+
translate: 0.2 # image translation (+/- fraction)
|
| 21 |
+
scale: 0.9 # image scale (+/- gain)
|
| 22 |
+
shear: 0.0 # image shear (+/- deg)
|
| 23 |
+
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
|
| 24 |
+
flipud: 0.0 # image flip up-down (probability)
|
| 25 |
+
fliplr: 0.5 # image flip left-right (probability)
|
| 26 |
+
mosaic: 1.0 # image mosaic (probability)
|
| 27 |
+
mixup: 0.15 # image mixup (probability)
|
| 28 |
+
copy_paste: 0.0 # image copy paste (probability)
|
| 29 |
+
paste_in: 0.15 # image copy paste (probability)
|
data/hyp.scratch.tiny.yaml
ADDED
|
@@ -0,0 +1,29 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
|
| 2 |
+
lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
|
| 3 |
+
momentum: 0.937 # SGD momentum/Adam beta1
|
| 4 |
+
weight_decay: 0.0005 # optimizer weight decay 5e-4
|
| 5 |
+
warmup_epochs: 3.0 # warmup epochs (fractions ok)
|
| 6 |
+
warmup_momentum: 0.8 # warmup initial momentum
|
| 7 |
+
warmup_bias_lr: 0.1 # warmup initial bias lr
|
| 8 |
+
box: 0.05 # box loss gain
|
| 9 |
+
cls: 0.5 # cls loss gain
|
| 10 |
+
cls_pw: 1.0 # cls BCELoss positive_weight
|
| 11 |
+
obj: 1.0 # obj loss gain (scale with pixels)
|
| 12 |
+
obj_pw: 1.0 # obj BCELoss positive_weight
|
| 13 |
+
iou_t: 0.20 # IoU training threshold
|
| 14 |
+
anchor_t: 4.0 # anchor-multiple threshold
|
| 15 |
+
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
|
| 16 |
+
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
|
| 17 |
+
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
|
| 18 |
+
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
|
| 19 |
+
degrees: 0.0 # image rotation (+/- deg)
|
| 20 |
+
translate: 0.1 # image translation (+/- fraction)
|
| 21 |
+
scale: 0.5 # image scale (+/- gain)
|
| 22 |
+
shear: 0.0 # image shear (+/- deg)
|
| 23 |
+
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
|
| 24 |
+
flipud: 0.0 # image flip up-down (probability)
|
| 25 |
+
fliplr: 0.5 # image flip left-right (probability)
|
| 26 |
+
mosaic: 1.0 # image mosaic (probability)
|
| 27 |
+
mixup: 0.05 # image mixup (probability)
|
| 28 |
+
copy_paste: 0.0 # image copy paste (probability)
|
| 29 |
+
paste_in: 0.05 # image copy paste (probability)
|
detect.py
ADDED
|
@@ -0,0 +1,183 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import argparse
|
| 2 |
+
import time
|
| 3 |
+
from pathlib import Path
|
| 4 |
+
|
| 5 |
+
import cv2
|
| 6 |
+
import torch
|
| 7 |
+
import torch.backends.cudnn as cudnn
|
| 8 |
+
from numpy import random
|
| 9 |
+
|
| 10 |
+
from models.experimental import attempt_load
|
| 11 |
+
from utils.datasets import LoadStreams, LoadImages
|
| 12 |
+
from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
|
| 13 |
+
scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
|
| 14 |
+
from utils.plots import plot_one_box
|
| 15 |
+
from utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
|
| 16 |
+
|
| 17 |
+
|
| 18 |
+
def detect(save_img=False):
|
| 19 |
+
source, weights, view_img, save_txt, imgsz, trace = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size, opt.trace
|
| 20 |
+
save_img = not opt.nosave and not source.endswith('.txt') # save inference images
|
| 21 |
+
webcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(
|
| 22 |
+
('rtsp://', 'rtmp://', 'http://', 'https://'))
|
| 23 |
+
|
| 24 |
+
# Directories
|
| 25 |
+
save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
|
| 26 |
+
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
|
| 27 |
+
|
| 28 |
+
# Initialize
|
| 29 |
+
set_logging()
|
| 30 |
+
device = select_device(opt.device)
|
| 31 |
+
half = device.type != 'cpu' # half precision only supported on CUDA
|
| 32 |
+
|
| 33 |
+
# Load model
|
| 34 |
+
model = attempt_load(weights, map_location=device) # load FP32 model
|
| 35 |
+
stride = int(model.stride.max()) # model stride
|
| 36 |
+
imgsz = check_img_size(imgsz, s=stride) # check img_size
|
| 37 |
+
|
| 38 |
+
if trace:
|
| 39 |
+
model = TracedModel(model, device, opt.img_size)
|
| 40 |
+
|
| 41 |
+
if half:
|
| 42 |
+
model.half() # to FP16
|
| 43 |
+
|
| 44 |
+
# Second-stage classifier
|
| 45 |
+
classify = False
|
| 46 |
+
if classify:
|
| 47 |
+
modelc = load_classifier(name='resnet101', n=2) # initialize
|
| 48 |
+
modelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()
|
| 49 |
+
|
| 50 |
+
# Set Dataloader
|
| 51 |
+
vid_path, vid_writer = None, None
|
| 52 |
+
if webcam:
|
| 53 |
+
view_img = check_imshow()
|
| 54 |
+
cudnn.benchmark = True # set True to speed up constant image size inference
|
| 55 |
+
dataset = LoadStreams(source, img_size=imgsz, stride=stride)
|
| 56 |
+
else:
|
| 57 |
+
dataset = LoadImages(source, img_size=imgsz, stride=stride)
|
| 58 |
+
|
| 59 |
+
# Get names and colors
|
| 60 |
+
names = model.module.names if hasattr(model, 'module') else model.names
|
| 61 |
+
colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
|
| 62 |
+
|
| 63 |
+
# Run inference
|
| 64 |
+
if device.type != 'cpu':
|
| 65 |
+
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
|
| 66 |
+
t0 = time.time()
|
| 67 |
+
for path, img, im0s, vid_cap in dataset:
|
| 68 |
+
img = torch.from_numpy(img).to(device)
|
| 69 |
+
img = img.half() if half else img.float() # uint8 to fp16/32
|
| 70 |
+
img /= 255.0 # 0 - 255 to 0.0 - 1.0
|
| 71 |
+
if img.ndimension() == 3:
|
| 72 |
+
img = img.unsqueeze(0)
|
| 73 |
+
|
| 74 |
+
# Inference
|
| 75 |
+
t1 = time_synchronized()
|
| 76 |
+
pred = model(img, augment=opt.augment)[0]
|
| 77 |
+
|
| 78 |
+
# Apply NMS
|
| 79 |
+
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
|
| 80 |
+
t2 = time_synchronized()
|
| 81 |
+
|
| 82 |
+
# Apply Classifier
|
| 83 |
+
if classify:
|
| 84 |
+
pred = apply_classifier(pred, modelc, img, im0s)
|
| 85 |
+
|
| 86 |
+
# Process detections
|
| 87 |
+
for i, det in enumerate(pred): # detections per image
|
| 88 |
+
if webcam: # batch_size >= 1
|
| 89 |
+
p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
|
| 90 |
+
else:
|
| 91 |
+
p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
|
| 92 |
+
|
| 93 |
+
p = Path(p) # to Path
|
| 94 |
+
save_path = str(save_dir / p.name) # img.jpg
|
| 95 |
+
txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # img.txt
|
| 96 |
+
s += '%gx%g ' % img.shape[2:] # print string
|
| 97 |
+
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
|
| 98 |
+
if len(det):
|
| 99 |
+
# Rescale boxes from img_size to im0 size
|
| 100 |
+
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
|
| 101 |
+
|
| 102 |
+
# Print results
|
| 103 |
+
for c in det[:, -1].unique():
|
| 104 |
+
n = (det[:, -1] == c).sum() # detections per class
|
| 105 |
+
s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
|
| 106 |
+
|
| 107 |
+
# Write results
|
| 108 |
+
for *xyxy, conf, cls in reversed(det):
|
| 109 |
+
if save_txt: # Write to file
|
| 110 |
+
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
|
| 111 |
+
line = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh) # label format
|
| 112 |
+
with open(txt_path + '.txt', 'a') as f:
|
| 113 |
+
f.write(('%g ' * len(line)).rstrip() % line + '\n')
|
| 114 |
+
|
| 115 |
+
if save_img or view_img: # Add bbox to image
|
| 116 |
+
label = f'{names[int(cls)]} {conf:.2f}'
|
| 117 |
+
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)
|
| 118 |
+
|
| 119 |
+
# Print time (inference + NMS)
|
| 120 |
+
#print(f'{s}Done. ({t2 - t1:.3f}s)')
|
| 121 |
+
|
| 122 |
+
# Stream results
|
| 123 |
+
if view_img:
|
| 124 |
+
cv2.imshow(str(p), im0)
|
| 125 |
+
cv2.waitKey(1) # 1 millisecond
|
| 126 |
+
|
| 127 |
+
# Save results (image with detections)
|
| 128 |
+
if save_img:
|
| 129 |
+
if dataset.mode == 'image':
|
| 130 |
+
cv2.imwrite(save_path, im0)
|
| 131 |
+
else: # 'video' or 'stream'
|
| 132 |
+
if vid_path != save_path: # new video
|
| 133 |
+
vid_path = save_path
|
| 134 |
+
if isinstance(vid_writer, cv2.VideoWriter):
|
| 135 |
+
vid_writer.release() # release previous video writer
|
| 136 |
+
if vid_cap: # video
|
| 137 |
+
fps = vid_cap.get(cv2.CAP_PROP_FPS)
|
| 138 |
+
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
|
| 139 |
+
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
|
| 140 |
+
else: # stream
|
| 141 |
+
fps, w, h = 30, im0.shape[1], im0.shape[0]
|
| 142 |
+
save_path += '.mp4'
|
| 143 |
+
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
|
| 144 |
+
vid_writer.write(im0)
|
| 145 |
+
|
| 146 |
+
if save_txt or save_img:
|
| 147 |
+
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
|
| 148 |
+
#print(f"Results saved to {save_dir}{s}")
|
| 149 |
+
|
| 150 |
+
print(f'Done. ({time.time() - t0:.3f}s)')
|
| 151 |
+
|
| 152 |
+
|
| 153 |
+
if __name__ == '__main__':
|
| 154 |
+
parser = argparse.ArgumentParser()
|
| 155 |
+
parser.add_argument('--weights', nargs='+', type=str, default='yolov7.pt', help='model.pt path(s)')
|
| 156 |
+
parser.add_argument('--source', type=str, default='inference/images', help='source') # file/folder, 0 for webcam
|
| 157 |
+
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
|
| 158 |
+
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
|
| 159 |
+
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
|
| 160 |
+
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
|
| 161 |
+
parser.add_argument('--view-img', action='store_true', help='display results')
|
| 162 |
+
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
|
| 163 |
+
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
|
| 164 |
+
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
|
| 165 |
+
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
|
| 166 |
+
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
|
| 167 |
+
parser.add_argument('--augment', action='store_true', help='augmented inference')
|
| 168 |
+
parser.add_argument('--update', action='store_true', help='update all models')
|
| 169 |
+
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
|
| 170 |
+
parser.add_argument('--name', default='exp', help='save results to project/name')
|
| 171 |
+
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
|
| 172 |
+
parser.add_argument('--trace', action='store_true', help='trace model')
|
| 173 |
+
opt = parser.parse_args()
|
| 174 |
+
print(opt)
|
| 175 |
+
#check_requirements(exclude=('pycocotools', 'thop'))
|
| 176 |
+
|
| 177 |
+
with torch.no_grad():
|
| 178 |
+
if opt.update: # update all models (to fix SourceChangeWarning)
|
| 179 |
+
for opt.weights in ['yolov7.pt']:
|
| 180 |
+
detect()
|
| 181 |
+
strip_optimizer(opt.weights)
|
| 182 |
+
else:
|
| 183 |
+
detect()
|
figure/performance.png
ADDED
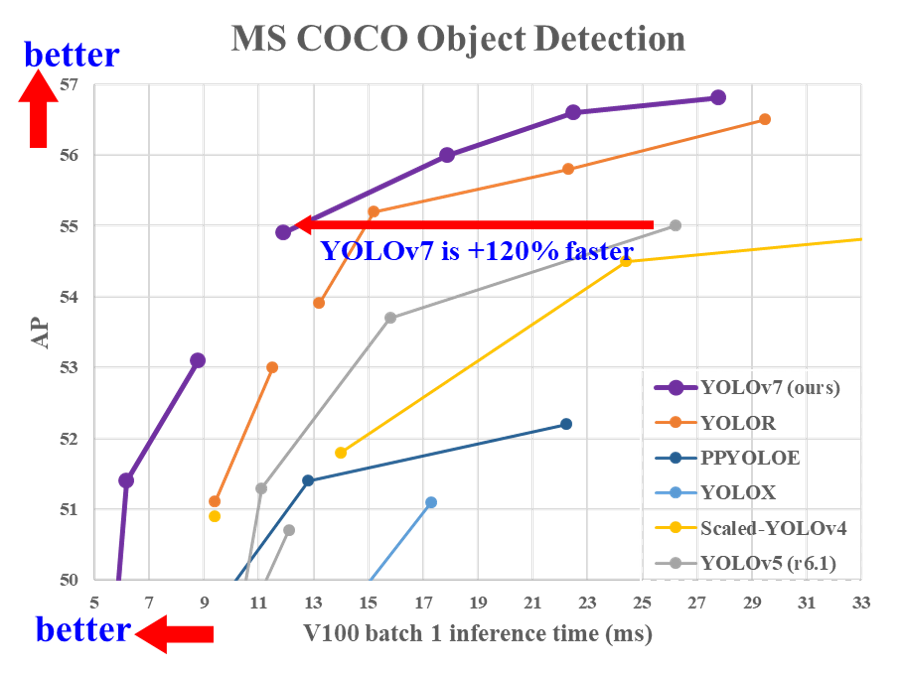
|
hubconf.py
ADDED
|
@@ -0,0 +1,97 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
"""PyTorch Hub models
|
| 2 |
+
|
| 3 |
+
Usage:
|
| 4 |
+
import torch
|
| 5 |
+
model = torch.hub.load('repo', 'model')
|
| 6 |
+
"""
|
| 7 |
+
|
| 8 |
+
from pathlib import Path
|
| 9 |
+
|
| 10 |
+
import torch
|
| 11 |
+
|
| 12 |
+
from models.yolo import Model
|
| 13 |
+
from utils.general import check_requirements, set_logging
|
| 14 |
+
from utils.google_utils import attempt_download
|
| 15 |
+
from utils.torch_utils import select_device
|
| 16 |
+
|
| 17 |
+
dependencies = ['torch', 'yaml']
|
| 18 |
+
check_requirements(Path(__file__).parent / 'requirements.txt', exclude=('pycocotools', 'thop'))
|
| 19 |
+
set_logging()
|
| 20 |
+
|
| 21 |
+
|
| 22 |
+
def create(name, pretrained, channels, classes, autoshape):
|
| 23 |
+
"""Creates a specified model
|
| 24 |
+
|
| 25 |
+
Arguments:
|
| 26 |
+
name (str): name of model, i.e. 'yolov7'
|
| 27 |
+
pretrained (bool): load pretrained weights into the model
|
| 28 |
+
channels (int): number of input channels
|
| 29 |
+
classes (int): number of model classes
|
| 30 |
+
|
| 31 |
+
Returns:
|
| 32 |
+
pytorch model
|
| 33 |
+
"""
|
| 34 |
+
try:
|
| 35 |
+
cfg = list((Path(__file__).parent / 'cfg').rglob(f'{name}.yaml'))[0] # model.yaml path
|
| 36 |
+
model = Model(cfg, channels, classes)
|
| 37 |
+
if pretrained:
|
| 38 |
+
fname = f'{name}.pt' # checkpoint filename
|
| 39 |
+
attempt_download(fname) # download if not found locally
|
| 40 |
+
ckpt = torch.load(fname, map_location=torch.device('cpu')) # load
|
| 41 |
+
msd = model.state_dict() # model state_dict
|
| 42 |
+
csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
|
| 43 |
+
csd = {k: v for k, v in csd.items() if msd[k].shape == v.shape} # filter
|
| 44 |
+
model.load_state_dict(csd, strict=False) # load
|
| 45 |
+
if len(ckpt['model'].names) == classes:
|
| 46 |
+
model.names = ckpt['model'].names # set class names attribute
|
| 47 |
+
if autoshape:
|
| 48 |
+
model = model.autoshape() # for file/URI/PIL/cv2/np inputs and NMS
|
| 49 |
+
device = select_device('0' if torch.cuda.is_available() else 'cpu') # default to GPU if available
|
| 50 |
+
return model.to(device)
|
| 51 |
+
|
| 52 |
+
except Exception as e:
|
| 53 |
+
s = 'Cache maybe be out of date, try force_reload=True.'
|
| 54 |
+
raise Exception(s) from e
|
| 55 |
+
|
| 56 |
+
|
| 57 |
+
def custom(path_or_model='path/to/model.pt', autoshape=True):
|
| 58 |
+
"""custom mode
|
| 59 |
+
|
| 60 |
+
Arguments (3 options):
|
| 61 |
+
path_or_model (str): 'path/to/model.pt'
|
| 62 |
+
path_or_model (dict): torch.load('path/to/model.pt')
|
| 63 |
+
path_or_model (nn.Module): torch.load('path/to/model.pt')['model']
|
| 64 |
+
|
| 65 |
+
Returns:
|
| 66 |
+
pytorch model
|
| 67 |
+
"""
|
| 68 |
+
model = torch.load(path_or_model) if isinstance(path_or_model, str) else path_or_model # load checkpoint
|
| 69 |
+
if isinstance(model, dict):
|
| 70 |
+
model = model['ema' if model.get('ema') else 'model'] # load model
|
| 71 |
+
|
| 72 |
+
hub_model = Model(model.yaml).to(next(model.parameters()).device) # create
|
| 73 |
+
hub_model.load_state_dict(model.float().state_dict()) # load state_dict
|
| 74 |
+
hub_model.names = model.names # class names
|
| 75 |
+
if autoshape:
|
| 76 |
+
hub_model = hub_model.autoshape() # for file/URI/PIL/cv2/np inputs and NMS
|
| 77 |
+
device = select_device('0' if torch.cuda.is_available() else 'cpu') # default to GPU if available
|
| 78 |
+
return hub_model.to(device)
|
| 79 |
+
|
| 80 |
+
|
| 81 |
+
def yolov7(pretrained=True, channels=3, classes=80, autoshape=True):
|
| 82 |
+
return create('yolov7', pretrained, channels, classes, autoshape)
|
| 83 |
+
|
| 84 |
+
|
| 85 |
+
if __name__ == '__main__':
|
| 86 |
+
model = custom(path_or_model='yolov7.pt') # custom example
|
| 87 |
+
# model = create(name='yolov7', pretrained=True, channels=3, classes=80, autoshape=True) # pretrained example
|
| 88 |
+
|
| 89 |
+
# Verify inference
|
| 90 |
+
import numpy as np
|
| 91 |
+
from PIL import Image
|
| 92 |
+
|
| 93 |
+
imgs = [np.zeros((640, 480, 3))]
|
| 94 |
+
|
| 95 |
+
results = model(imgs) # batched inference
|
| 96 |
+
results.print()
|
| 97 |
+
results.save()
|
inference/images/horses.jpg
ADDED

|
models/__init__.py
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
# init
|
models/common.py
ADDED
|
@@ -0,0 +1,2019 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import math
|
| 2 |
+
from copy import copy
|
| 3 |
+
from pathlib import Path
|
| 4 |
+
|
| 5 |
+
import numpy as np
|
| 6 |
+
import pandas as pd
|
| 7 |
+
import requests
|
| 8 |
+
import torch
|
| 9 |
+
import torch.nn as nn
|
| 10 |
+
import torch.nn.functional as F
|
| 11 |
+
from torchvision.ops import DeformConv2d
|
| 12 |
+
from PIL import Image
|
| 13 |
+
from torch.cuda import amp
|
| 14 |
+
|
| 15 |
+
from utils.datasets import letterbox
|
| 16 |
+
from utils.general import non_max_suppression, make_divisible, scale_coords, increment_path, xyxy2xywh
|
| 17 |
+
from utils.plots import color_list, plot_one_box
|
| 18 |
+
from utils.torch_utils import time_synchronized
|
| 19 |
+
|
| 20 |
+
|
| 21 |
+
##### basic ####
|
| 22 |
+
|
| 23 |
+
def autopad(k, p=None): # kernel, padding
|
| 24 |
+
# Pad to 'same'
|
| 25 |
+
if p is None:
|
| 26 |
+
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
|
| 27 |
+
return p
|
| 28 |
+
|
| 29 |
+
|
| 30 |
+
class MP(nn.Module):
|
| 31 |
+
def __init__(self, k=2):
|
| 32 |
+
super(MP, self).__init__()
|
| 33 |
+
self.m = nn.MaxPool2d(kernel_size=k, stride=k)
|
| 34 |
+
|
| 35 |
+
def forward(self, x):
|
| 36 |
+
return self.m(x)
|
| 37 |
+
|
| 38 |
+
|
| 39 |
+
class SP(nn.Module):
|
| 40 |
+
def __init__(self, k=3, s=1):
|
| 41 |
+
super(SP, self).__init__()
|
| 42 |
+
self.m = nn.MaxPool2d(kernel_size=k, stride=s, padding=k // 2)
|
| 43 |
+
|
| 44 |
+
def forward(self, x):
|
| 45 |
+
return self.m(x)
|
| 46 |
+
|
| 47 |
+
|
| 48 |
+
class ReOrg(nn.Module):
|
| 49 |
+
def __init__(self):
|
| 50 |
+
super(ReOrg, self).__init__()
|
| 51 |
+
|
| 52 |
+
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
|
| 53 |
+
return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)
|
| 54 |
+
|
| 55 |
+
|
| 56 |
+
class Concat(nn.Module):
|
| 57 |
+
def __init__(self, dimension=1):
|
| 58 |
+
super(Concat, self).__init__()
|
| 59 |
+
self.d = dimension
|
| 60 |
+
|
| 61 |
+
def forward(self, x):
|
| 62 |
+
return torch.cat(x, self.d)
|
| 63 |
+
|
| 64 |
+
|
| 65 |
+
class Chuncat(nn.Module):
|
| 66 |
+
def __init__(self, dimension=1):
|
| 67 |
+
super(Chuncat, self).__init__()
|
| 68 |
+
self.d = dimension
|
| 69 |
+
|
| 70 |
+
def forward(self, x):
|
| 71 |
+
x1 = []
|
| 72 |
+
x2 = []
|
| 73 |
+
for xi in x:
|
| 74 |
+
xi1, xi2 = xi.chunk(2, self.d)
|
| 75 |
+
x1.append(xi1)
|
| 76 |
+
x2.append(xi2)
|
| 77 |
+
return torch.cat(x1+x2, self.d)
|
| 78 |
+
|
| 79 |
+
|
| 80 |
+
class Shortcut(nn.Module):
|
| 81 |
+
def __init__(self, dimension=0):
|
| 82 |
+
super(Shortcut, self).__init__()
|
| 83 |
+
self.d = dimension
|
| 84 |
+
|
| 85 |
+
def forward(self, x):
|
| 86 |
+
return x[0]+x[1]
|
| 87 |
+
|
| 88 |
+
|
| 89 |
+
class Foldcut(nn.Module):
|
| 90 |
+
def __init__(self, dimension=0):
|
| 91 |
+
super(Foldcut, self).__init__()
|
| 92 |
+
self.d = dimension
|
| 93 |
+
|
| 94 |
+
def forward(self, x):
|
| 95 |
+
x1, x2 = x.chunk(2, self.d)
|
| 96 |
+
return x1+x2
|
| 97 |
+
|
| 98 |
+
|
| 99 |
+
class Conv(nn.Module):
|
| 100 |
+
# Standard convolution
|
| 101 |
+
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
|
| 102 |
+
super(Conv, self).__init__()
|
| 103 |
+
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
|
| 104 |
+
self.bn = nn.BatchNorm2d(c2)
|
| 105 |
+
self.act = nn.LeakyReLU(0.1, inplace=True) if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
|
| 106 |
+
|
| 107 |
+
def forward(self, x):
|
| 108 |
+
return self.act(self.bn(self.conv(x)))
|
| 109 |
+
|
| 110 |
+
def fuseforward(self, x):
|
| 111 |
+
return self.act(self.conv(x))
|
| 112 |
+
|
| 113 |
+
|
| 114 |
+
class RobustConv(nn.Module):
|
| 115 |
+
# Robust convolution (use high kernel size 7-11 for: downsampling and other layers). Train for 300 - 450 epochs.
|
| 116 |
+
def __init__(self, c1, c2, k=7, s=1, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
|
| 117 |
+
super(RobustConv, self).__init__()
|
| 118 |
+
self.conv_dw = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
|
| 119 |
+
self.conv1x1 = nn.Conv2d(c1, c2, 1, 1, 0, groups=1, bias=True)
|
| 120 |
+
self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
|
| 121 |
+
|
| 122 |
+
def forward(self, x):
|
| 123 |
+
x = x.to(memory_format=torch.channels_last)
|
| 124 |
+
x = self.conv1x1(self.conv_dw(x))
|
| 125 |
+
if self.gamma is not None:
|
| 126 |
+
x = x.mul(self.gamma.reshape(1, -1, 1, 1))
|
| 127 |
+
return x
|
| 128 |
+
|
| 129 |
+
|
| 130 |
+
class RobustConv2(nn.Module):
|
| 131 |
+
# Robust convolution 2 (use [32, 5, 2] or [32, 7, 4] or [32, 11, 8] for one of the paths in CSP).
|
| 132 |
+
def __init__(self, c1, c2, k=7, s=4, p=None, g=1, act=True, layer_scale_init_value=1e-6): # ch_in, ch_out, kernel, stride, padding, groups
|
| 133 |
+
super(RobustConv2, self).__init__()
|
| 134 |
+
self.conv_strided = Conv(c1, c1, k=k, s=s, p=p, g=c1, act=act)
|
| 135 |
+
self.conv_deconv = nn.ConvTranspose2d(in_channels=c1, out_channels=c2, kernel_size=s, stride=s,
|
| 136 |
+
padding=0, bias=True, dilation=1, groups=1
|
| 137 |
+
)
|
| 138 |
+
self.gamma = nn.Parameter(layer_scale_init_value * torch.ones(c2)) if layer_scale_init_value > 0 else None
|
| 139 |
+
|
| 140 |
+
def forward(self, x):
|
| 141 |
+
x = self.conv_deconv(self.conv_strided(x))
|
| 142 |
+
if self.gamma is not None:
|
| 143 |
+
x = x.mul(self.gamma.reshape(1, -1, 1, 1))
|
| 144 |
+
return x
|
| 145 |
+
|
| 146 |
+
|
| 147 |
+
def DWConv(c1, c2, k=1, s=1, act=True):
|
| 148 |
+
# Depthwise convolution
|
| 149 |
+
return Conv(c1, c2, k, s, g=math.gcd(c1, c2), act=act)
|
| 150 |
+
|
| 151 |
+
|
| 152 |
+
class GhostConv(nn.Module):
|
| 153 |
+
# Ghost Convolution https://github.com/huawei-noah/ghostnet
|
| 154 |
+
def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
|
| 155 |
+
super(GhostConv, self).__init__()
|
| 156 |
+
c_ = c2 // 2 # hidden channels
|
| 157 |
+
self.cv1 = Conv(c1, c_, k, s, None, g, act)
|
| 158 |
+
self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
|
| 159 |
+
|
| 160 |
+
def forward(self, x):
|
| 161 |
+
y = self.cv1(x)
|
| 162 |
+
return torch.cat([y, self.cv2(y)], 1)
|
| 163 |
+
|
| 164 |
+
|
| 165 |
+
class Stem(nn.Module):
|
| 166 |
+
# Stem
|
| 167 |
+
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
|
| 168 |
+
super(Stem, self).__init__()
|
| 169 |
+
c_ = int(c2/2) # hidden channels
|
| 170 |
+
self.cv1 = Conv(c1, c_, 3, 2)
|
| 171 |
+
self.cv2 = Conv(c_, c_, 1, 1)
|
| 172 |
+
self.cv3 = Conv(c_, c_, 3, 2)
|
| 173 |
+
self.pool = torch.nn.MaxPool2d(2, stride=2)
|
| 174 |
+
self.cv4 = Conv(2 * c_, c2, 1, 1)
|
| 175 |
+
|
| 176 |
+
def forward(self, x):
|
| 177 |
+
x = self.cv1(x)
|
| 178 |
+
return self.cv4(torch.cat((self.cv3(self.cv2(x)), self.pool(x)), dim=1))
|
| 179 |
+
|
| 180 |
+
|
| 181 |
+
class DownC(nn.Module):
|
| 182 |
+
# Spatial pyramid pooling layer used in YOLOv3-SPP
|
| 183 |
+
def __init__(self, c1, c2, n=1, k=2):
|
| 184 |
+
super(DownC, self).__init__()
|
| 185 |
+
c_ = int(c1) # hidden channels
|
| 186 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 187 |
+
self.cv2 = Conv(c_, c2//2, 3, k)
|
| 188 |
+
self.cv3 = Conv(c1, c2//2, 1, 1)
|
| 189 |
+
self.mp = nn.MaxPool2d(kernel_size=k, stride=k)
|
| 190 |
+
|
| 191 |
+
def forward(self, x):
|
| 192 |
+
return torch.cat((self.cv2(self.cv1(x)), self.cv3(self.mp(x))), dim=1)
|
| 193 |
+
|
| 194 |
+
|
| 195 |
+
class SPP(nn.Module):
|
| 196 |
+
# Spatial pyramid pooling layer used in YOLOv3-SPP
|
| 197 |
+
def __init__(self, c1, c2, k=(5, 9, 13)):
|
| 198 |
+
super(SPP, self).__init__()
|
| 199 |
+
c_ = c1 // 2 # hidden channels
|
| 200 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 201 |
+
self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
|
| 202 |
+
self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
|
| 203 |
+
|
| 204 |
+
def forward(self, x):
|
| 205 |
+
x = self.cv1(x)
|
| 206 |
+
return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
|
| 207 |
+
|
| 208 |
+
|
| 209 |
+
class Bottleneck(nn.Module):
|
| 210 |
+
# Darknet bottleneck
|
| 211 |
+
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
|
| 212 |
+
super(Bottleneck, self).__init__()
|
| 213 |
+
c_ = int(c2 * e) # hidden channels
|
| 214 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 215 |
+
self.cv2 = Conv(c_, c2, 3, 1, g=g)
|
| 216 |
+
self.add = shortcut and c1 == c2
|
| 217 |
+
|
| 218 |
+
def forward(self, x):
|
| 219 |
+
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
|
| 220 |
+
|
| 221 |
+
|
| 222 |
+
class Res(nn.Module):
|
| 223 |
+
# ResNet bottleneck
|
| 224 |
+
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
|
| 225 |
+
super(Res, self).__init__()
|
| 226 |
+
c_ = int(c2 * e) # hidden channels
|
| 227 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 228 |
+
self.cv2 = Conv(c_, c_, 3, 1, g=g)
|
| 229 |
+
self.cv3 = Conv(c_, c2, 1, 1)
|
| 230 |
+
self.add = shortcut and c1 == c2
|
| 231 |
+
|
| 232 |
+
def forward(self, x):
|
| 233 |
+
return x + self.cv3(self.cv2(self.cv1(x))) if self.add else self.cv3(self.cv2(self.cv1(x)))
|
| 234 |
+
|
| 235 |
+
|
| 236 |
+
class ResX(Res):
|
| 237 |
+
# ResNet bottleneck
|
| 238 |
+
def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
|
| 239 |
+
super().__init__(c1, c2, shortcu, g, e)
|
| 240 |
+
c_ = int(c2 * e) # hidden channels
|
| 241 |
+
|
| 242 |
+
|
| 243 |
+
class Ghost(nn.Module):
|
| 244 |
+
# Ghost Bottleneck https://github.com/huawei-noah/ghostnet
|
| 245 |
+
def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
|
| 246 |
+
super(Ghost, self).__init__()
|
| 247 |
+
c_ = c2 // 2
|
| 248 |
+
self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw
|
| 249 |
+
DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
|
| 250 |
+
GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
|
| 251 |
+
self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False),
|
| 252 |
+
Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity()
|
| 253 |
+
|
| 254 |
+
def forward(self, x):
|
| 255 |
+
return self.conv(x) + self.shortcut(x)
|
| 256 |
+
|
| 257 |
+
##### end of basic #####
|
| 258 |
+
|
| 259 |
+
|
| 260 |
+
##### cspnet #####
|
| 261 |
+
|
| 262 |
+
class SPPCSPC(nn.Module):
|
| 263 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 264 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
|
| 265 |
+
super(SPPCSPC, self).__init__()
|
| 266 |
+
c_ = int(2 * c2 * e) # hidden channels
|
| 267 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 268 |
+
self.cv2 = Conv(c1, c_, 1, 1)
|
| 269 |
+
self.cv3 = Conv(c_, c_, 3, 1)
|
| 270 |
+
self.cv4 = Conv(c_, c_, 1, 1)
|
| 271 |
+
self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
|
| 272 |
+
self.cv5 = Conv(4 * c_, c_, 1, 1)
|
| 273 |
+
self.cv6 = Conv(c_, c_, 3, 1)
|
| 274 |
+
self.cv7 = Conv(2 * c_, c2, 1, 1)
|
| 275 |
+
|
| 276 |
+
def forward(self, x):
|
| 277 |
+
x1 = self.cv4(self.cv3(self.cv1(x)))
|
| 278 |
+
y1 = self.cv6(self.cv5(torch.cat([x1] + [m(x1) for m in self.m], 1)))
|
| 279 |
+
y2 = self.cv2(x)
|
| 280 |
+
return self.cv7(torch.cat((y1, y2), dim=1))
|
| 281 |
+
|
| 282 |
+
class GhostSPPCSPC(SPPCSPC):
|
| 283 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 284 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=(5, 9, 13)):
|
| 285 |
+
super().__init__(c1, c2, n, shortcut, g, e, k)
|
| 286 |
+
c_ = int(2 * c2 * e) # hidden channels
|
| 287 |
+
self.cv1 = GhostConv(c1, c_, 1, 1)
|
| 288 |
+
self.cv2 = GhostConv(c1, c_, 1, 1)
|
| 289 |
+
self.cv3 = GhostConv(c_, c_, 3, 1)
|
| 290 |
+
self.cv4 = GhostConv(c_, c_, 1, 1)
|
| 291 |
+
self.cv5 = GhostConv(4 * c_, c_, 1, 1)
|
| 292 |
+
self.cv6 = GhostConv(c_, c_, 3, 1)
|
| 293 |
+
self.cv7 = GhostConv(2 * c_, c2, 1, 1)
|
| 294 |
+
|
| 295 |
+
|
| 296 |
+
class GhostStem(Stem):
|
| 297 |
+
# Stem
|
| 298 |
+
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
|
| 299 |
+
super().__init__(c1, c2, k, s, p, g, act)
|
| 300 |
+
c_ = int(c2/2) # hidden channels
|
| 301 |
+
self.cv1 = GhostConv(c1, c_, 3, 2)
|
| 302 |
+
self.cv2 = GhostConv(c_, c_, 1, 1)
|
| 303 |
+
self.cv3 = GhostConv(c_, c_, 3, 2)
|
| 304 |
+
self.cv4 = GhostConv(2 * c_, c2, 1, 1)
|
| 305 |
+
|
| 306 |
+
|
| 307 |
+
class BottleneckCSPA(nn.Module):
|
| 308 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 309 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 310 |
+
super(BottleneckCSPA, self).__init__()
|
| 311 |
+
c_ = int(c2 * e) # hidden channels
|
| 312 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 313 |
+
self.cv2 = Conv(c1, c_, 1, 1)
|
| 314 |
+
self.cv3 = Conv(2 * c_, c2, 1, 1)
|
| 315 |
+
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 316 |
+
|
| 317 |
+
def forward(self, x):
|
| 318 |
+
y1 = self.m(self.cv1(x))
|
| 319 |
+
y2 = self.cv2(x)
|
| 320 |
+
return self.cv3(torch.cat((y1, y2), dim=1))
|
| 321 |
+
|
| 322 |
+
|
| 323 |
+
class BottleneckCSPB(nn.Module):
|
| 324 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 325 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 326 |
+
super(BottleneckCSPB, self).__init__()
|
| 327 |
+
c_ = int(c2) # hidden channels
|
| 328 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 329 |
+
self.cv2 = Conv(c_, c_, 1, 1)
|
| 330 |
+
self.cv3 = Conv(2 * c_, c2, 1, 1)
|
| 331 |
+
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 332 |
+
|
| 333 |
+
def forward(self, x):
|
| 334 |
+
x1 = self.cv1(x)
|
| 335 |
+
y1 = self.m(x1)
|
| 336 |
+
y2 = self.cv2(x1)
|
| 337 |
+
return self.cv3(torch.cat((y1, y2), dim=1))
|
| 338 |
+
|
| 339 |
+
|
| 340 |
+
class BottleneckCSPC(nn.Module):
|
| 341 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 342 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 343 |
+
super(BottleneckCSPC, self).__init__()
|
| 344 |
+
c_ = int(c2 * e) # hidden channels
|
| 345 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 346 |
+
self.cv2 = Conv(c1, c_, 1, 1)
|
| 347 |
+
self.cv3 = Conv(c_, c_, 1, 1)
|
| 348 |
+
self.cv4 = Conv(2 * c_, c2, 1, 1)
|
| 349 |
+
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 350 |
+
|
| 351 |
+
def forward(self, x):
|
| 352 |
+
y1 = self.cv3(self.m(self.cv1(x)))
|
| 353 |
+
y2 = self.cv2(x)
|
| 354 |
+
return self.cv4(torch.cat((y1, y2), dim=1))
|
| 355 |
+
|
| 356 |
+
|
| 357 |
+
class ResCSPA(BottleneckCSPA):
|
| 358 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 359 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 360 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 361 |
+
c_ = int(c2 * e) # hidden channels
|
| 362 |
+
self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 363 |
+
|
| 364 |
+
|
| 365 |
+
class ResCSPB(BottleneckCSPB):
|
| 366 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 367 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 368 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 369 |
+
c_ = int(c2) # hidden channels
|
| 370 |
+
self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 371 |
+
|
| 372 |
+
|
| 373 |
+
class ResCSPC(BottleneckCSPC):
|
| 374 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 375 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 376 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 377 |
+
c_ = int(c2 * e) # hidden channels
|
| 378 |
+
self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 379 |
+
|
| 380 |
+
|
| 381 |
+
class ResXCSPA(ResCSPA):
|
| 382 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 383 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 384 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 385 |
+
c_ = int(c2 * e) # hidden channels
|
| 386 |
+
self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 387 |
+
|
| 388 |
+
|
| 389 |
+
class ResXCSPB(ResCSPB):
|
| 390 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 391 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 392 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 393 |
+
c_ = int(c2) # hidden channels
|
| 394 |
+
self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 395 |
+
|
| 396 |
+
|
| 397 |
+
class ResXCSPC(ResCSPC):
|
| 398 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 399 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 400 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 401 |
+
c_ = int(c2 * e) # hidden channels
|
| 402 |
+
self.m = nn.Sequential(*[Res(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 403 |
+
|
| 404 |
+
|
| 405 |
+
class GhostCSPA(BottleneckCSPA):
|
| 406 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 407 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 408 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 409 |
+
c_ = int(c2 * e) # hidden channels
|
| 410 |
+
self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
|
| 411 |
+
|
| 412 |
+
|
| 413 |
+
class GhostCSPB(BottleneckCSPB):
|
| 414 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 415 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 416 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 417 |
+
c_ = int(c2) # hidden channels
|
| 418 |
+
self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
|
| 419 |
+
|
| 420 |
+
|
| 421 |
+
class GhostCSPC(BottleneckCSPC):
|
| 422 |
+
# CSP https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 423 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 424 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 425 |
+
c_ = int(c2 * e) # hidden channels
|
| 426 |
+
self.m = nn.Sequential(*[Ghost(c_, c_) for _ in range(n)])
|
| 427 |
+
|
| 428 |
+
##### end of cspnet #####
|
| 429 |
+
|
| 430 |
+
|
| 431 |
+
##### yolor #####
|
| 432 |
+
|
| 433 |
+
class ImplicitA(nn.Module):
|
| 434 |
+
def __init__(self, channel, mean=0., std=.02):
|
| 435 |
+
super(ImplicitA, self).__init__()
|
| 436 |
+
self.channel = channel
|
| 437 |
+
self.mean = mean
|
| 438 |
+
self.std = std
|
| 439 |
+
self.implicit = nn.Parameter(torch.zeros(1, channel, 1, 1))
|
| 440 |
+
nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
|
| 441 |
+
|
| 442 |
+
def forward(self, x):
|
| 443 |
+
return self.implicit + x
|
| 444 |
+
|
| 445 |
+
|
| 446 |
+
class ImplicitM(nn.Module):
|
| 447 |
+
def __init__(self, channel, mean=0., std=.02):
|
| 448 |
+
super(ImplicitM, self).__init__()
|
| 449 |
+
self.channel = channel
|
| 450 |
+
self.mean = mean
|
| 451 |
+
self.std = std
|
| 452 |
+
self.implicit = nn.Parameter(torch.ones(1, channel, 1, 1))
|
| 453 |
+
nn.init.normal_(self.implicit, mean=self.mean, std=self.std)
|
| 454 |
+
|
| 455 |
+
def forward(self, x):
|
| 456 |
+
return self.implicit * x
|
| 457 |
+
|
| 458 |
+
##### end of yolor #####
|
| 459 |
+
|
| 460 |
+
|
| 461 |
+
##### repvgg #####
|
| 462 |
+
|
| 463 |
+
class RepConv(nn.Module):
|
| 464 |
+
# Represented convolution
|
| 465 |
+
# https://arxiv.org/abs/2101.03697
|
| 466 |
+
|
| 467 |
+
def __init__(self, c1, c2, k=3, s=1, p=None, g=1, act=True, deploy=False):
|
| 468 |
+
super(RepConv, self).__init__()
|
| 469 |
+
|
| 470 |
+
self.deploy = deploy
|
| 471 |
+
self.groups = g
|
| 472 |
+
self.in_channels = c1
|
| 473 |
+
self.out_channels = c2
|
| 474 |
+
|
| 475 |
+
assert k == 3
|
| 476 |
+
assert autopad(k, p) == 1
|
| 477 |
+
|
| 478 |
+
padding_11 = autopad(k, p) - k // 2
|
| 479 |
+
|
| 480 |
+
self.act = nn.LeakyReLU(0.1, inplace=True) if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
|
| 481 |
+
|
| 482 |
+
if deploy:
|
| 483 |
+
self.rbr_reparam = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=True)
|
| 484 |
+
|
| 485 |
+
else:
|
| 486 |
+
self.rbr_identity = (nn.BatchNorm2d(num_features=c1) if c2 == c1 and s == 1 else None)
|
| 487 |
+
|
| 488 |
+
self.rbr_dense = nn.Sequential(
|
| 489 |
+
nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False),
|
| 490 |
+
nn.BatchNorm2d(num_features=c2),
|
| 491 |
+
)
|
| 492 |
+
|
| 493 |
+
self.rbr_1x1 = nn.Sequential(
|
| 494 |
+
nn.Conv2d( c1, c2, 1, s, padding_11, groups=g, bias=False),
|
| 495 |
+
nn.BatchNorm2d(num_features=c2),
|
| 496 |
+
)
|
| 497 |
+
|
| 498 |
+
def forward(self, inputs):
|
| 499 |
+
if hasattr(self, "rbr_reparam"):
|
| 500 |
+
return self.act(self.rbr_reparam(inputs))
|
| 501 |
+
|
| 502 |
+
if self.rbr_identity is None:
|
| 503 |
+
id_out = 0
|
| 504 |
+
else:
|
| 505 |
+
id_out = self.rbr_identity(inputs)
|
| 506 |
+
|
| 507 |
+
return self.act(self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out)
|
| 508 |
+
|
| 509 |
+
def get_equivalent_kernel_bias(self):
|
| 510 |
+
kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
|
| 511 |
+
kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
|
| 512 |
+
kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
|
| 513 |
+
return (
|
| 514 |
+
kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid,
|
| 515 |
+
bias3x3 + bias1x1 + biasid,
|
| 516 |
+
)
|
| 517 |
+
|
| 518 |
+
def _pad_1x1_to_3x3_tensor(self, kernel1x1):
|
| 519 |
+
if kernel1x1 is None:
|
| 520 |
+
return 0
|
| 521 |
+
else:
|
| 522 |
+
return nn.functional.pad(kernel1x1, [1, 1, 1, 1])
|
| 523 |
+
|
| 524 |
+
def _fuse_bn_tensor(self, branch):
|
| 525 |
+
if branch is None:
|
| 526 |
+
return 0, 0
|
| 527 |
+
if isinstance(branch, nn.Sequential):
|
| 528 |
+
kernel = branch[0].weight
|
| 529 |
+
running_mean = branch[1].running_mean
|
| 530 |
+
running_var = branch[1].running_var
|
| 531 |
+
gamma = branch[1].weight
|
| 532 |
+
beta = branch[1].bias
|
| 533 |
+
eps = branch[1].eps
|
| 534 |
+
else:
|
| 535 |
+
assert isinstance(branch, nn.BatchNorm2d)
|
| 536 |
+
if not hasattr(self, "id_tensor"):
|
| 537 |
+
input_dim = self.in_channels // self.groups
|
| 538 |
+
kernel_value = np.zeros(
|
| 539 |
+
(self.in_channels, input_dim, 3, 3), dtype=np.float32
|
| 540 |
+
)
|
| 541 |
+
for i in range(self.in_channels):
|
| 542 |
+
kernel_value[i, i % input_dim, 1, 1] = 1
|
| 543 |
+
self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
|
| 544 |
+
kernel = self.id_tensor
|
| 545 |
+
running_mean = branch.running_mean
|
| 546 |
+
running_var = branch.running_var
|
| 547 |
+
gamma = branch.weight
|
| 548 |
+
beta = branch.bias
|
| 549 |
+
eps = branch.eps
|
| 550 |
+
std = (running_var + eps).sqrt()
|
| 551 |
+
t = (gamma / std).reshape(-1, 1, 1, 1)
|
| 552 |
+
return kernel * t, beta - running_mean * gamma / std
|
| 553 |
+
|
| 554 |
+
def repvgg_convert(self):
|
| 555 |
+
kernel, bias = self.get_equivalent_kernel_bias()
|
| 556 |
+
return (
|
| 557 |
+
kernel.detach().cpu().numpy(),
|
| 558 |
+
bias.detach().cpu().numpy(),
|
| 559 |
+
)
|
| 560 |
+
|
| 561 |
+
def fuse_conv_bn(self, conv, bn):
|
| 562 |
+
|
| 563 |
+
std = (bn.running_var + bn.eps).sqrt()
|
| 564 |
+
bias = bn.bias - bn.running_mean * bn.weight / std
|
| 565 |
+
|
| 566 |
+
t = (bn.weight / std).reshape(-1, 1, 1, 1)
|
| 567 |
+
weights = conv.weight * t
|
| 568 |
+
|
| 569 |
+
bn = nn.Identity()
|
| 570 |
+
conv = nn.Conv2d(in_channels = conv.in_channels,
|
| 571 |
+
out_channels = conv.out_channels,
|
| 572 |
+
kernel_size = conv.kernel_size,
|
| 573 |
+
stride=conv.stride,
|
| 574 |
+
padding = conv.padding,
|
| 575 |
+
dilation = conv.dilation,
|
| 576 |
+
groups = conv.groups,
|
| 577 |
+
bias = True,
|
| 578 |
+
padding_mode = conv.padding_mode)
|
| 579 |
+
|
| 580 |
+
conv.weight = torch.nn.Parameter(weights)
|
| 581 |
+
conv.bias = torch.nn.Parameter(bias)
|
| 582 |
+
return conv
|
| 583 |
+
|
| 584 |
+
def fuse_repvgg_block(self):
|
| 585 |
+
if self.deploy:
|
| 586 |
+
return
|
| 587 |
+
print(f"RepConv.fuse_repvgg_block")
|
| 588 |
+
|
| 589 |
+
self.rbr_dense = self.fuse_conv_bn(self.rbr_dense[0], self.rbr_dense[1])
|
| 590 |
+
|
| 591 |
+
self.rbr_1x1 = self.fuse_conv_bn(self.rbr_1x1[0], self.rbr_1x1[1])
|
| 592 |
+
rbr_1x1_bias = self.rbr_1x1.bias
|
| 593 |
+
weight_1x1_expanded = torch.nn.functional.pad(self.rbr_1x1.weight, [1, 1, 1, 1])
|
| 594 |
+
|
| 595 |
+
# Fuse self.rbr_identity
|
| 596 |
+
if (isinstance(self.rbr_identity, nn.BatchNorm2d) or isinstance(self.rbr_identity, nn.modules.batchnorm.SyncBatchNorm)):
|
| 597 |
+
# print(f"fuse: rbr_identity == BatchNorm2d or SyncBatchNorm")
|
| 598 |
+
identity_conv_1x1 = nn.Conv2d(
|
| 599 |
+
in_channels=self.in_channels,
|
| 600 |
+
out_channels=self.out_channels,
|
| 601 |
+
kernel_size=1,
|
| 602 |
+
stride=1,
|
| 603 |
+
padding=0,
|
| 604 |
+
groups=self.groups,
|
| 605 |
+
bias=False)
|
| 606 |
+
identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.to(self.rbr_1x1.weight.data.device)
|
| 607 |
+
identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.squeeze().squeeze()
|
| 608 |
+
# print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
|
| 609 |
+
identity_conv_1x1.weight.data.fill_(0.0)
|
| 610 |
+
identity_conv_1x1.weight.data.fill_diagonal_(1.0)
|
| 611 |
+
identity_conv_1x1.weight.data = identity_conv_1x1.weight.data.unsqueeze(2).unsqueeze(3)
|
| 612 |
+
# print(f" identity_conv_1x1.weight = {identity_conv_1x1.weight.shape}")
|
| 613 |
+
|
| 614 |
+
identity_conv_1x1 = self.fuse_conv_bn(identity_conv_1x1, self.rbr_identity)
|
| 615 |
+
bias_identity_expanded = identity_conv_1x1.bias
|
| 616 |
+
weight_identity_expanded = torch.nn.functional.pad(identity_conv_1x1.weight, [1, 1, 1, 1])
|
| 617 |
+
else:
|
| 618 |
+
# print(f"fuse: rbr_identity != BatchNorm2d, rbr_identity = {self.rbr_identity}")
|
| 619 |
+
bias_identity_expanded = torch.nn.Parameter( torch.zeros_like(rbr_1x1_bias) )
|
| 620 |
+
weight_identity_expanded = torch.nn.Parameter( torch.zeros_like(weight_1x1_expanded) )
|
| 621 |
+
|
| 622 |
+
|
| 623 |
+
#print(f"self.rbr_1x1.weight = {self.rbr_1x1.weight.shape}, ")
|
| 624 |
+
#print(f"weight_1x1_expanded = {weight_1x1_expanded.shape}, ")
|
| 625 |
+
#print(f"self.rbr_dense.weight = {self.rbr_dense.weight.shape}, ")
|
| 626 |
+
|
| 627 |
+
self.rbr_dense.weight = torch.nn.Parameter(self.rbr_dense.weight + weight_1x1_expanded + weight_identity_expanded)
|
| 628 |
+
self.rbr_dense.bias = torch.nn.Parameter(self.rbr_dense.bias + rbr_1x1_bias + bias_identity_expanded)
|
| 629 |
+
|
| 630 |
+
self.rbr_reparam = self.rbr_dense
|
| 631 |
+
self.deploy = True
|
| 632 |
+
|
| 633 |
+
if self.rbr_identity is not None:
|
| 634 |
+
del self.rbr_identity
|
| 635 |
+
self.rbr_identity = None
|
| 636 |
+
|
| 637 |
+
if self.rbr_1x1 is not None:
|
| 638 |
+
del self.rbr_1x1
|
| 639 |
+
self.rbr_1x1 = None
|
| 640 |
+
|
| 641 |
+
if self.rbr_dense is not None:
|
| 642 |
+
del self.rbr_dense
|
| 643 |
+
self.rbr_dense = None
|
| 644 |
+
|
| 645 |
+
|
| 646 |
+
class RepBottleneck(Bottleneck):
|
| 647 |
+
# Standard bottleneck
|
| 648 |
+
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
|
| 649 |
+
super().__init__(c1, c2, shortcut=True, g=1, e=0.5)
|
| 650 |
+
c_ = int(c2 * e) # hidden channels
|
| 651 |
+
self.cv2 = RepConv(c_, c2, 3, 1, g=g)
|
| 652 |
+
|
| 653 |
+
|
| 654 |
+
class RepBottleneckCSPA(BottleneckCSPA):
|
| 655 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 656 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 657 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 658 |
+
c_ = int(c2 * e) # hidden channels
|
| 659 |
+
self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 660 |
+
|
| 661 |
+
|
| 662 |
+
class RepBottleneckCSPB(BottleneckCSPB):
|
| 663 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 664 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 665 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 666 |
+
c_ = int(c2) # hidden channels
|
| 667 |
+
self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 668 |
+
|
| 669 |
+
|
| 670 |
+
class RepBottleneckCSPC(BottleneckCSPC):
|
| 671 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 672 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 673 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 674 |
+
c_ = int(c2 * e) # hidden channels
|
| 675 |
+
self.m = nn.Sequential(*[RepBottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 676 |
+
|
| 677 |
+
|
| 678 |
+
class RepRes(Res):
|
| 679 |
+
# Standard bottleneck
|
| 680 |
+
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
|
| 681 |
+
super().__init__(c1, c2, shortcut, g, e)
|
| 682 |
+
c_ = int(c2 * e) # hidden channels
|
| 683 |
+
self.cv2 = RepConv(c_, c_, 3, 1, g=g)
|
| 684 |
+
|
| 685 |
+
|
| 686 |
+
class RepResCSPA(ResCSPA):
|
| 687 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 688 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 689 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 690 |
+
c_ = int(c2 * e) # hidden channels
|
| 691 |
+
self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 692 |
+
|
| 693 |
+
|
| 694 |
+
class RepResCSPB(ResCSPB):
|
| 695 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 696 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 697 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 698 |
+
c_ = int(c2) # hidden channels
|
| 699 |
+
self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 700 |
+
|
| 701 |
+
|
| 702 |
+
class RepResCSPC(ResCSPC):
|
| 703 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 704 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 705 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 706 |
+
c_ = int(c2 * e) # hidden channels
|
| 707 |
+
self.m = nn.Sequential(*[RepRes(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 708 |
+
|
| 709 |
+
|
| 710 |
+
class RepResX(ResX):
|
| 711 |
+
# Standard bottleneck
|
| 712 |
+
def __init__(self, c1, c2, shortcut=True, g=32, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
|
| 713 |
+
super().__init__(c1, c2, shortcut, g, e)
|
| 714 |
+
c_ = int(c2 * e) # hidden channels
|
| 715 |
+
self.cv2 = RepConv(c_, c_, 3, 1, g=g)
|
| 716 |
+
|
| 717 |
+
|
| 718 |
+
class RepResXCSPA(ResXCSPA):
|
| 719 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 720 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 721 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 722 |
+
c_ = int(c2 * e) # hidden channels
|
| 723 |
+
self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 724 |
+
|
| 725 |
+
|
| 726 |
+
class RepResXCSPB(ResXCSPB):
|
| 727 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 728 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 729 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 730 |
+
c_ = int(c2) # hidden channels
|
| 731 |
+
self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 732 |
+
|
| 733 |
+
|
| 734 |
+
class RepResXCSPC(ResXCSPC):
|
| 735 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 736 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=32, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 737 |
+
super().__init__(c1, c2, n, shortcut, g, e)
|
| 738 |
+
c_ = int(c2 * e) # hidden channels
|
| 739 |
+
self.m = nn.Sequential(*[RepResX(c_, c_, shortcut, g, e=0.5) for _ in range(n)])
|
| 740 |
+
|
| 741 |
+
##### end of repvgg #####
|
| 742 |
+
|
| 743 |
+
|
| 744 |
+
##### transformer #####
|
| 745 |
+
|
| 746 |
+
class TransformerLayer(nn.Module):
|
| 747 |
+
# Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
|
| 748 |
+
def __init__(self, c, num_heads):
|
| 749 |
+
super().__init__()
|
| 750 |
+
self.q = nn.Linear(c, c, bias=False)
|
| 751 |
+
self.k = nn.Linear(c, c, bias=False)
|
| 752 |
+
self.v = nn.Linear(c, c, bias=False)
|
| 753 |
+
self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
|
| 754 |
+
self.fc1 = nn.Linear(c, c, bias=False)
|
| 755 |
+
self.fc2 = nn.Linear(c, c, bias=False)
|
| 756 |
+
|
| 757 |
+
def forward(self, x):
|
| 758 |
+
x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
|
| 759 |
+
x = self.fc2(self.fc1(x)) + x
|
| 760 |
+
return x
|
| 761 |
+
|
| 762 |
+
|
| 763 |
+
class TransformerBlock(nn.Module):
|
| 764 |
+
# Vision Transformer https://arxiv.org/abs/2010.11929
|
| 765 |
+
def __init__(self, c1, c2, num_heads, num_layers):
|
| 766 |
+
super().__init__()
|
| 767 |
+
self.conv = None
|
| 768 |
+
if c1 != c2:
|
| 769 |
+
self.conv = Conv(c1, c2)
|
| 770 |
+
self.linear = nn.Linear(c2, c2) # learnable position embedding
|
| 771 |
+
self.tr = nn.Sequential(*[TransformerLayer(c2, num_heads) for _ in range(num_layers)])
|
| 772 |
+
self.c2 = c2
|
| 773 |
+
|
| 774 |
+
def forward(self, x):
|
| 775 |
+
if self.conv is not None:
|
| 776 |
+
x = self.conv(x)
|
| 777 |
+
b, _, w, h = x.shape
|
| 778 |
+
p = x.flatten(2)
|
| 779 |
+
p = p.unsqueeze(0)
|
| 780 |
+
p = p.transpose(0, 3)
|
| 781 |
+
p = p.squeeze(3)
|
| 782 |
+
e = self.linear(p)
|
| 783 |
+
x = p + e
|
| 784 |
+
|
| 785 |
+
x = self.tr(x)
|
| 786 |
+
x = x.unsqueeze(3)
|
| 787 |
+
x = x.transpose(0, 3)
|
| 788 |
+
x = x.reshape(b, self.c2, w, h)
|
| 789 |
+
return x
|
| 790 |
+
|
| 791 |
+
##### end of transformer #####
|
| 792 |
+
|
| 793 |
+
|
| 794 |
+
##### yolov5 #####
|
| 795 |
+
|
| 796 |
+
class Focus(nn.Module):
|
| 797 |
+
# Focus wh information into c-space
|
| 798 |
+
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
|
| 799 |
+
super(Focus, self).__init__()
|
| 800 |
+
self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
|
| 801 |
+
# self.contract = Contract(gain=2)
|
| 802 |
+
|
| 803 |
+
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
|
| 804 |
+
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
|
| 805 |
+
# return self.conv(self.contract(x))
|
| 806 |
+
|
| 807 |
+
|
| 808 |
+
class SPPF(nn.Module):
|
| 809 |
+
# Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
|
| 810 |
+
def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
|
| 811 |
+
super().__init__()
|
| 812 |
+
c_ = c1 // 2 # hidden channels
|
| 813 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 814 |
+
self.cv2 = Conv(c_ * 4, c2, 1, 1)
|
| 815 |
+
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
|
| 816 |
+
|
| 817 |
+
def forward(self, x):
|
| 818 |
+
x = self.cv1(x)
|
| 819 |
+
y1 = self.m(x)
|
| 820 |
+
y2 = self.m(y1)
|
| 821 |
+
return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
|
| 822 |
+
|
| 823 |
+
|
| 824 |
+
class Contract(nn.Module):
|
| 825 |
+
# Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
|
| 826 |
+
def __init__(self, gain=2):
|
| 827 |
+
super().__init__()
|
| 828 |
+
self.gain = gain
|
| 829 |
+
|
| 830 |
+
def forward(self, x):
|
| 831 |
+
N, C, H, W = x.size() # assert (H / s == 0) and (W / s == 0), 'Indivisible gain'
|
| 832 |
+
s = self.gain
|
| 833 |
+
x = x.view(N, C, H // s, s, W // s, s) # x(1,64,40,2,40,2)
|
| 834 |
+
x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
|
| 835 |
+
return x.view(N, C * s * s, H // s, W // s) # x(1,256,40,40)
|
| 836 |
+
|
| 837 |
+
|
| 838 |
+
class Expand(nn.Module):
|
| 839 |
+
# Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
|
| 840 |
+
def __init__(self, gain=2):
|
| 841 |
+
super().__init__()
|
| 842 |
+
self.gain = gain
|
| 843 |
+
|
| 844 |
+
def forward(self, x):
|
| 845 |
+
N, C, H, W = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
|
| 846 |
+
s = self.gain
|
| 847 |
+
x = x.view(N, s, s, C // s ** 2, H, W) # x(1,2,2,16,80,80)
|
| 848 |
+
x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
|
| 849 |
+
return x.view(N, C // s ** 2, H * s, W * s) # x(1,16,160,160)
|
| 850 |
+
|
| 851 |
+
|
| 852 |
+
class NMS(nn.Module):
|
| 853 |
+
# Non-Maximum Suppression (NMS) module
|
| 854 |
+
conf = 0.25 # confidence threshold
|
| 855 |
+
iou = 0.45 # IoU threshold
|
| 856 |
+
classes = None # (optional list) filter by class
|
| 857 |
+
|
| 858 |
+
def __init__(self):
|
| 859 |
+
super(NMS, self).__init__()
|
| 860 |
+
|
| 861 |
+
def forward(self, x):
|
| 862 |
+
return non_max_suppression(x[0], conf_thres=self.conf, iou_thres=self.iou, classes=self.classes)
|
| 863 |
+
|
| 864 |
+
|
| 865 |
+
class autoShape(nn.Module):
|
| 866 |
+
# input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS
|
| 867 |
+
conf = 0.25 # NMS confidence threshold
|
| 868 |
+
iou = 0.45 # NMS IoU threshold
|
| 869 |
+
classes = None # (optional list) filter by class
|
| 870 |
+
|
| 871 |
+
def __init__(self, model):
|
| 872 |
+
super(autoShape, self).__init__()
|
| 873 |
+
self.model = model.eval()
|
| 874 |
+
|
| 875 |
+
def autoshape(self):
|
| 876 |
+
print('autoShape already enabled, skipping... ') # model already converted to model.autoshape()
|
| 877 |
+
return self
|
| 878 |
+
|
| 879 |
+
@torch.no_grad()
|
| 880 |
+
def forward(self, imgs, size=640, augment=False, profile=False):
|
| 881 |
+
# Inference from various sources. For height=640, width=1280, RGB images example inputs are:
|
| 882 |
+
# filename: imgs = 'data/samples/zidane.jpg'
|
| 883 |
+
# URI: = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/zidane.jpg'
|
| 884 |
+
# OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)
|
| 885 |
+
# PIL: = Image.open('image.jpg') # HWC x(640,1280,3)
|
| 886 |
+
# numpy: = np.zeros((640,1280,3)) # HWC
|
| 887 |
+
# torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)
|
| 888 |
+
# multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images
|
| 889 |
+
|
| 890 |
+
t = [time_synchronized()]
|
| 891 |
+
p = next(self.model.parameters()) # for device and type
|
| 892 |
+
if isinstance(imgs, torch.Tensor): # torch
|
| 893 |
+
with amp.autocast(enabled=p.device.type != 'cpu'):
|
| 894 |
+
return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference
|
| 895 |
+
|
| 896 |
+
# Pre-process
|
| 897 |
+
n, imgs = (len(imgs), imgs) if isinstance(imgs, list) else (1, [imgs]) # number of images, list of images
|
| 898 |
+
shape0, shape1, files = [], [], [] # image and inference shapes, filenames
|
| 899 |
+
for i, im in enumerate(imgs):
|
| 900 |
+
f = f'image{i}' # filename
|
| 901 |
+
if isinstance(im, str): # filename or uri
|
| 902 |
+
im, f = np.asarray(Image.open(requests.get(im, stream=True).raw if im.startswith('http') else im)), im
|
| 903 |
+
elif isinstance(im, Image.Image): # PIL Image
|
| 904 |
+
im, f = np.asarray(im), getattr(im, 'filename', f) or f
|
| 905 |
+
files.append(Path(f).with_suffix('.jpg').name)
|
| 906 |
+
if im.shape[0] < 5: # image in CHW
|
| 907 |
+
im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)
|
| 908 |
+
im = im[:, :, :3] if im.ndim == 3 else np.tile(im[:, :, None], 3) # enforce 3ch input
|
| 909 |
+
s = im.shape[:2] # HWC
|
| 910 |
+
shape0.append(s) # image shape
|
| 911 |
+
g = (size / max(s)) # gain
|
| 912 |
+
shape1.append([y * g for y in s])
|
| 913 |
+
imgs[i] = im # update
|
| 914 |
+
shape1 = [make_divisible(x, int(self.stride.max())) for x in np.stack(shape1, 0).max(0)] # inference shape
|
| 915 |
+
x = [letterbox(im, new_shape=shape1, auto=False)[0] for im in imgs] # pad
|
| 916 |
+
x = np.stack(x, 0) if n > 1 else x[0][None] # stack
|
| 917 |
+
x = np.ascontiguousarray(x.transpose((0, 3, 1, 2))) # BHWC to BCHW
|
| 918 |
+
x = torch.from_numpy(x).to(p.device).type_as(p) / 255. # uint8 to fp16/32
|
| 919 |
+
t.append(time_synchronized())
|
| 920 |
+
|
| 921 |
+
with amp.autocast(enabled=p.device.type != 'cpu'):
|
| 922 |
+
# Inference
|
| 923 |
+
y = self.model(x, augment, profile)[0] # forward
|
| 924 |
+
t.append(time_synchronized())
|
| 925 |
+
|
| 926 |
+
# Post-process
|
| 927 |
+
y = non_max_suppression(y, conf_thres=self.conf, iou_thres=self.iou, classes=self.classes) # NMS
|
| 928 |
+
for i in range(n):
|
| 929 |
+
scale_coords(shape1, y[i][:, :4], shape0[i])
|
| 930 |
+
|
| 931 |
+
t.append(time_synchronized())
|
| 932 |
+
return Detections(imgs, y, files, t, self.names, x.shape)
|
| 933 |
+
|
| 934 |
+
|
| 935 |
+
class Detections:
|
| 936 |
+
# detections class for YOLOv5 inference results
|
| 937 |
+
def __init__(self, imgs, pred, files, times=None, names=None, shape=None):
|
| 938 |
+
super(Detections, self).__init__()
|
| 939 |
+
d = pred[0].device # device
|
| 940 |
+
gn = [torch.tensor([*[im.shape[i] for i in [1, 0, 1, 0]], 1., 1.], device=d) for im in imgs] # normalizations
|
| 941 |
+
self.imgs = imgs # list of images as numpy arrays
|
| 942 |
+
self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)
|
| 943 |
+
self.names = names # class names
|
| 944 |
+
self.files = files # image filenames
|
| 945 |
+
self.xyxy = pred # xyxy pixels
|
| 946 |
+
self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels
|
| 947 |
+
self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized
|
| 948 |
+
self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized
|
| 949 |
+
self.n = len(self.pred) # number of images (batch size)
|
| 950 |
+
self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)
|
| 951 |
+
self.s = shape # inference BCHW shape
|
| 952 |
+
|
| 953 |
+
def display(self, pprint=False, show=False, save=False, render=False, save_dir=''):
|
| 954 |
+
colors = color_list()
|
| 955 |
+
for i, (img, pred) in enumerate(zip(self.imgs, self.pred)):
|
| 956 |
+
str = f'image {i + 1}/{len(self.pred)}: {img.shape[0]}x{img.shape[1]} '
|
| 957 |
+
if pred is not None:
|
| 958 |
+
for c in pred[:, -1].unique():
|
| 959 |
+
n = (pred[:, -1] == c).sum() # detections per class
|
| 960 |
+
str += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string
|
| 961 |
+
if show or save or render:
|
| 962 |
+
for *box, conf, cls in pred: # xyxy, confidence, class
|
| 963 |
+
label = f'{self.names[int(cls)]} {conf:.2f}'
|
| 964 |
+
plot_one_box(box, img, label=label, color=colors[int(cls) % 10])
|
| 965 |
+
img = Image.fromarray(img.astype(np.uint8)) if isinstance(img, np.ndarray) else img # from np
|
| 966 |
+
if pprint:
|
| 967 |
+
print(str.rstrip(', '))
|
| 968 |
+
if show:
|
| 969 |
+
img.show(self.files[i]) # show
|
| 970 |
+
if save:
|
| 971 |
+
f = self.files[i]
|
| 972 |
+
img.save(Path(save_dir) / f) # save
|
| 973 |
+
print(f"{'Saved' * (i == 0)} {f}", end=',' if i < self.n - 1 else f' to {save_dir}\n')
|
| 974 |
+
if render:
|
| 975 |
+
self.imgs[i] = np.asarray(img)
|
| 976 |
+
|
| 977 |
+
def print(self):
|
| 978 |
+
self.display(pprint=True) # print results
|
| 979 |
+
print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)
|
| 980 |
+
|
| 981 |
+
def show(self):
|
| 982 |
+
self.display(show=True) # show results
|
| 983 |
+
|
| 984 |
+
def save(self, save_dir='runs/hub/exp'):
|
| 985 |
+
save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/hub/exp') # increment save_dir
|
| 986 |
+
Path(save_dir).mkdir(parents=True, exist_ok=True)
|
| 987 |
+
self.display(save=True, save_dir=save_dir) # save results
|
| 988 |
+
|
| 989 |
+
def render(self):
|
| 990 |
+
self.display(render=True) # render results
|
| 991 |
+
return self.imgs
|
| 992 |
+
|
| 993 |
+
def pandas(self):
|
| 994 |
+
# return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])
|
| 995 |
+
new = copy(self) # return copy
|
| 996 |
+
ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns
|
| 997 |
+
cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns
|
| 998 |
+
for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):
|
| 999 |
+
a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update
|
| 1000 |
+
setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])
|
| 1001 |
+
return new
|
| 1002 |
+
|
| 1003 |
+
def tolist(self):
|
| 1004 |
+
# return a list of Detections objects, i.e. 'for result in results.tolist():'
|
| 1005 |
+
x = [Detections([self.imgs[i]], [self.pred[i]], self.names, self.s) for i in range(self.n)]
|
| 1006 |
+
for d in x:
|
| 1007 |
+
for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:
|
| 1008 |
+
setattr(d, k, getattr(d, k)[0]) # pop out of list
|
| 1009 |
+
return x
|
| 1010 |
+
|
| 1011 |
+
def __len__(self):
|
| 1012 |
+
return self.n
|
| 1013 |
+
|
| 1014 |
+
|
| 1015 |
+
class Classify(nn.Module):
|
| 1016 |
+
# Classification head, i.e. x(b,c1,20,20) to x(b,c2)
|
| 1017 |
+
def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups
|
| 1018 |
+
super(Classify, self).__init__()
|
| 1019 |
+
self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)
|
| 1020 |
+
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)
|
| 1021 |
+
self.flat = nn.Flatten()
|
| 1022 |
+
|
| 1023 |
+
def forward(self, x):
|
| 1024 |
+
z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list
|
| 1025 |
+
return self.flat(self.conv(z)) # flatten to x(b,c2)
|
| 1026 |
+
|
| 1027 |
+
##### end of yolov5 ######
|
| 1028 |
+
|
| 1029 |
+
|
| 1030 |
+
##### orepa #####
|
| 1031 |
+
|
| 1032 |
+
def transI_fusebn(kernel, bn):
|
| 1033 |
+
gamma = bn.weight
|
| 1034 |
+
std = (bn.running_var + bn.eps).sqrt()
|
| 1035 |
+
return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / std
|
| 1036 |
+
|
| 1037 |
+
|
| 1038 |
+
class ConvBN(nn.Module):
|
| 1039 |
+
def __init__(self, in_channels, out_channels, kernel_size,
|
| 1040 |
+
stride=1, padding=0, dilation=1, groups=1, deploy=False, nonlinear=None):
|
| 1041 |
+
super().__init__()
|
| 1042 |
+
if nonlinear is None:
|
| 1043 |
+
self.nonlinear = nn.Identity()
|
| 1044 |
+
else:
|
| 1045 |
+
self.nonlinear = nonlinear
|
| 1046 |
+
if deploy:
|
| 1047 |
+
self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
|
| 1048 |
+
stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)
|
| 1049 |
+
else:
|
| 1050 |
+
self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
|
| 1051 |
+
stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)
|
| 1052 |
+
self.bn = nn.BatchNorm2d(num_features=out_channels)
|
| 1053 |
+
|
| 1054 |
+
def forward(self, x):
|
| 1055 |
+
if hasattr(self, 'bn'):
|
| 1056 |
+
return self.nonlinear(self.bn(self.conv(x)))
|
| 1057 |
+
else:
|
| 1058 |
+
return self.nonlinear(self.conv(x))
|
| 1059 |
+
|
| 1060 |
+
def switch_to_deploy(self):
|
| 1061 |
+
kernel, bias = transI_fusebn(self.conv.weight, self.bn)
|
| 1062 |
+
conv = nn.Conv2d(in_channels=self.conv.in_channels, out_channels=self.conv.out_channels, kernel_size=self.conv.kernel_size,
|
| 1063 |
+
stride=self.conv.stride, padding=self.conv.padding, dilation=self.conv.dilation, groups=self.conv.groups, bias=True)
|
| 1064 |
+
conv.weight.data = kernel
|
| 1065 |
+
conv.bias.data = bias
|
| 1066 |
+
for para in self.parameters():
|
| 1067 |
+
para.detach_()
|
| 1068 |
+
self.__delattr__('conv')
|
| 1069 |
+
self.__delattr__('bn')
|
| 1070 |
+
self.conv = conv
|
| 1071 |
+
|
| 1072 |
+
class OREPA_3x3_RepConv(nn.Module):
|
| 1073 |
+
|
| 1074 |
+
def __init__(self, in_channels, out_channels, kernel_size,
|
| 1075 |
+
stride=1, padding=0, dilation=1, groups=1,
|
| 1076 |
+
internal_channels_1x1_3x3=None,
|
| 1077 |
+
deploy=False, nonlinear=None, single_init=False):
|
| 1078 |
+
super(OREPA_3x3_RepConv, self).__init__()
|
| 1079 |
+
self.deploy = deploy
|
| 1080 |
+
|
| 1081 |
+
if nonlinear is None:
|
| 1082 |
+
self.nonlinear = nn.Identity()
|
| 1083 |
+
else:
|
| 1084 |
+
self.nonlinear = nonlinear
|
| 1085 |
+
|
| 1086 |
+
self.kernel_size = kernel_size
|
| 1087 |
+
self.in_channels = in_channels
|
| 1088 |
+
self.out_channels = out_channels
|
| 1089 |
+
self.groups = groups
|
| 1090 |
+
assert padding == kernel_size // 2
|
| 1091 |
+
|
| 1092 |
+
self.stride = stride
|
| 1093 |
+
self.padding = padding
|
| 1094 |
+
self.dilation = dilation
|
| 1095 |
+
|
| 1096 |
+
self.branch_counter = 0
|
| 1097 |
+
|
| 1098 |
+
self.weight_rbr_origin = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), kernel_size, kernel_size))
|
| 1099 |
+
nn.init.kaiming_uniform_(self.weight_rbr_origin, a=math.sqrt(1.0))
|
| 1100 |
+
self.branch_counter += 1
|
| 1101 |
+
|
| 1102 |
+
|
| 1103 |
+
if groups < out_channels:
|
| 1104 |
+
self.weight_rbr_avg_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
|
| 1105 |
+
self.weight_rbr_pfir_conv = nn.Parameter(torch.Tensor(out_channels, int(in_channels/self.groups), 1, 1))
|
| 1106 |
+
nn.init.kaiming_uniform_(self.weight_rbr_avg_conv, a=1.0)
|
| 1107 |
+
nn.init.kaiming_uniform_(self.weight_rbr_pfir_conv, a=1.0)
|
| 1108 |
+
self.weight_rbr_avg_conv.data
|
| 1109 |
+
self.weight_rbr_pfir_conv.data
|
| 1110 |
+
self.register_buffer('weight_rbr_avg_avg', torch.ones(kernel_size, kernel_size).mul(1.0/kernel_size/kernel_size))
|
| 1111 |
+
self.branch_counter += 1
|
| 1112 |
+
|
| 1113 |
+
else:
|
| 1114 |
+
raise NotImplementedError
|
| 1115 |
+
self.branch_counter += 1
|
| 1116 |
+
|
| 1117 |
+
if internal_channels_1x1_3x3 is None:
|
| 1118 |
+
internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channels
|
| 1119 |
+
|
| 1120 |
+
if internal_channels_1x1_3x3 == in_channels:
|
| 1121 |
+
self.weight_rbr_1x1_kxk_idconv1 = nn.Parameter(torch.zeros(in_channels, int(in_channels/self.groups), 1, 1))
|
| 1122 |
+
id_value = np.zeros((in_channels, int(in_channels/self.groups), 1, 1))
|
| 1123 |
+
for i in range(in_channels):
|
| 1124 |
+
id_value[i, i % int(in_channels/self.groups), 0, 0] = 1
|
| 1125 |
+
id_tensor = torch.from_numpy(id_value).type_as(self.weight_rbr_1x1_kxk_idconv1)
|
| 1126 |
+
self.register_buffer('id_tensor', id_tensor)
|
| 1127 |
+
|
| 1128 |
+
else:
|
| 1129 |
+
self.weight_rbr_1x1_kxk_conv1 = nn.Parameter(torch.Tensor(internal_channels_1x1_3x3, int(in_channels/self.groups), 1, 1))
|
| 1130 |
+
nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv1, a=math.sqrt(1.0))
|
| 1131 |
+
self.weight_rbr_1x1_kxk_conv2 = nn.Parameter(torch.Tensor(out_channels, int(internal_channels_1x1_3x3/self.groups), kernel_size, kernel_size))
|
| 1132 |
+
nn.init.kaiming_uniform_(self.weight_rbr_1x1_kxk_conv2, a=math.sqrt(1.0))
|
| 1133 |
+
self.branch_counter += 1
|
| 1134 |
+
|
| 1135 |
+
expand_ratio = 8
|
| 1136 |
+
self.weight_rbr_gconv_dw = nn.Parameter(torch.Tensor(in_channels*expand_ratio, 1, kernel_size, kernel_size))
|
| 1137 |
+
self.weight_rbr_gconv_pw = nn.Parameter(torch.Tensor(out_channels, in_channels*expand_ratio, 1, 1))
|
| 1138 |
+
nn.init.kaiming_uniform_(self.weight_rbr_gconv_dw, a=math.sqrt(1.0))
|
| 1139 |
+
nn.init.kaiming_uniform_(self.weight_rbr_gconv_pw, a=math.sqrt(1.0))
|
| 1140 |
+
self.branch_counter += 1
|
| 1141 |
+
|
| 1142 |
+
if out_channels == in_channels and stride == 1:
|
| 1143 |
+
self.branch_counter += 1
|
| 1144 |
+
|
| 1145 |
+
self.vector = nn.Parameter(torch.Tensor(self.branch_counter, self.out_channels))
|
| 1146 |
+
self.bn = nn.BatchNorm2d(out_channels)
|
| 1147 |
+
|
| 1148 |
+
self.fre_init()
|
| 1149 |
+
|
| 1150 |
+
nn.init.constant_(self.vector[0, :], 0.25) #origin
|
| 1151 |
+
nn.init.constant_(self.vector[1, :], 0.25) #avg
|
| 1152 |
+
nn.init.constant_(self.vector[2, :], 0.0) #prior
|
| 1153 |
+
nn.init.constant_(self.vector[3, :], 0.5) #1x1_kxk
|
| 1154 |
+
nn.init.constant_(self.vector[4, :], 0.5) #dws_conv
|
| 1155 |
+
|
| 1156 |
+
|
| 1157 |
+
def fre_init(self):
|
| 1158 |
+
prior_tensor = torch.Tensor(self.out_channels, self.kernel_size, self.kernel_size)
|
| 1159 |
+
half_fg = self.out_channels/2
|
| 1160 |
+
for i in range(self.out_channels):
|
| 1161 |
+
for h in range(3):
|
| 1162 |
+
for w in range(3):
|
| 1163 |
+
if i < half_fg:
|
| 1164 |
+
prior_tensor[i, h, w] = math.cos(math.pi*(h+0.5)*(i+1)/3)
|
| 1165 |
+
else:
|
| 1166 |
+
prior_tensor[i, h, w] = math.cos(math.pi*(w+0.5)*(i+1-half_fg)/3)
|
| 1167 |
+
|
| 1168 |
+
self.register_buffer('weight_rbr_prior', prior_tensor)
|
| 1169 |
+
|
| 1170 |
+
def weight_gen(self):
|
| 1171 |
+
|
| 1172 |
+
weight_rbr_origin = torch.einsum('oihw,o->oihw', self.weight_rbr_origin, self.vector[0, :])
|
| 1173 |
+
|
| 1174 |
+
weight_rbr_avg = torch.einsum('oihw,o->oihw', torch.einsum('oihw,hw->oihw', self.weight_rbr_avg_conv, self.weight_rbr_avg_avg), self.vector[1, :])
|
| 1175 |
+
|
| 1176 |
+
weight_rbr_pfir = torch.einsum('oihw,o->oihw', torch.einsum('oihw,ohw->oihw', self.weight_rbr_pfir_conv, self.weight_rbr_prior), self.vector[2, :])
|
| 1177 |
+
|
| 1178 |
+
weight_rbr_1x1_kxk_conv1 = None
|
| 1179 |
+
if hasattr(self, 'weight_rbr_1x1_kxk_idconv1'):
|
| 1180 |
+
weight_rbr_1x1_kxk_conv1 = (self.weight_rbr_1x1_kxk_idconv1 + self.id_tensor).squeeze()
|
| 1181 |
+
elif hasattr(self, 'weight_rbr_1x1_kxk_conv1'):
|
| 1182 |
+
weight_rbr_1x1_kxk_conv1 = self.weight_rbr_1x1_kxk_conv1.squeeze()
|
| 1183 |
+
else:
|
| 1184 |
+
raise NotImplementedError
|
| 1185 |
+
weight_rbr_1x1_kxk_conv2 = self.weight_rbr_1x1_kxk_conv2
|
| 1186 |
+
|
| 1187 |
+
if self.groups > 1:
|
| 1188 |
+
g = self.groups
|
| 1189 |
+
t, ig = weight_rbr_1x1_kxk_conv1.size()
|
| 1190 |
+
o, tg, h, w = weight_rbr_1x1_kxk_conv2.size()
|
| 1191 |
+
weight_rbr_1x1_kxk_conv1 = weight_rbr_1x1_kxk_conv1.view(g, int(t/g), ig)
|
| 1192 |
+
weight_rbr_1x1_kxk_conv2 = weight_rbr_1x1_kxk_conv2.view(g, int(o/g), tg, h, w)
|
| 1193 |
+
weight_rbr_1x1_kxk = torch.einsum('gti,gothw->goihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2).view(o, ig, h, w)
|
| 1194 |
+
else:
|
| 1195 |
+
weight_rbr_1x1_kxk = torch.einsum('ti,othw->oihw', weight_rbr_1x1_kxk_conv1, weight_rbr_1x1_kxk_conv2)
|
| 1196 |
+
|
| 1197 |
+
weight_rbr_1x1_kxk = torch.einsum('oihw,o->oihw', weight_rbr_1x1_kxk, self.vector[3, :])
|
| 1198 |
+
|
| 1199 |
+
weight_rbr_gconv = self.dwsc2full(self.weight_rbr_gconv_dw, self.weight_rbr_gconv_pw, self.in_channels)
|
| 1200 |
+
weight_rbr_gconv = torch.einsum('oihw,o->oihw', weight_rbr_gconv, self.vector[4, :])
|
| 1201 |
+
|
| 1202 |
+
weight = weight_rbr_origin + weight_rbr_avg + weight_rbr_1x1_kxk + weight_rbr_pfir + weight_rbr_gconv
|
| 1203 |
+
|
| 1204 |
+
return weight
|
| 1205 |
+
|
| 1206 |
+
def dwsc2full(self, weight_dw, weight_pw, groups):
|
| 1207 |
+
|
| 1208 |
+
t, ig, h, w = weight_dw.size()
|
| 1209 |
+
o, _, _, _ = weight_pw.size()
|
| 1210 |
+
tg = int(t/groups)
|
| 1211 |
+
i = int(ig*groups)
|
| 1212 |
+
weight_dw = weight_dw.view(groups, tg, ig, h, w)
|
| 1213 |
+
weight_pw = weight_pw.squeeze().view(o, groups, tg)
|
| 1214 |
+
|
| 1215 |
+
weight_dsc = torch.einsum('gtihw,ogt->ogihw', weight_dw, weight_pw)
|
| 1216 |
+
return weight_dsc.view(o, i, h, w)
|
| 1217 |
+
|
| 1218 |
+
def forward(self, inputs):
|
| 1219 |
+
weight = self.weight_gen()
|
| 1220 |
+
out = F.conv2d(inputs, weight, bias=None, stride=self.stride, padding=self.padding, dilation=self.dilation, groups=self.groups)
|
| 1221 |
+
|
| 1222 |
+
return self.nonlinear(self.bn(out))
|
| 1223 |
+
|
| 1224 |
+
class RepConv_OREPA(nn.Module):
|
| 1225 |
+
|
| 1226 |
+
def __init__(self, c1, c2, k=3, s=1, padding=1, dilation=1, groups=1, padding_mode='zeros', deploy=False, use_se=False, nonlinear=nn.SiLU()):
|
| 1227 |
+
super(RepConv_OREPA, self).__init__()
|
| 1228 |
+
self.deploy = deploy
|
| 1229 |
+
self.groups = groups
|
| 1230 |
+
self.in_channels = c1
|
| 1231 |
+
self.out_channels = c2
|
| 1232 |
+
|
| 1233 |
+
self.padding = padding
|
| 1234 |
+
self.dilation = dilation
|
| 1235 |
+
self.groups = groups
|
| 1236 |
+
|
| 1237 |
+
assert k == 3
|
| 1238 |
+
assert padding == 1
|
| 1239 |
+
|
| 1240 |
+
padding_11 = padding - k // 2
|
| 1241 |
+
|
| 1242 |
+
if nonlinear is None:
|
| 1243 |
+
self.nonlinearity = nn.Identity()
|
| 1244 |
+
else:
|
| 1245 |
+
self.nonlinearity = nonlinear
|
| 1246 |
+
|
| 1247 |
+
if use_se:
|
| 1248 |
+
self.se = SEBlock(self.out_channels, internal_neurons=self.out_channels // 16)
|
| 1249 |
+
else:
|
| 1250 |
+
self.se = nn.Identity()
|
| 1251 |
+
|
| 1252 |
+
if deploy:
|
| 1253 |
+
self.rbr_reparam = nn.Conv2d(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s,
|
| 1254 |
+
padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)
|
| 1255 |
+
|
| 1256 |
+
else:
|
| 1257 |
+
self.rbr_identity = nn.BatchNorm2d(num_features=self.in_channels) if self.out_channels == self.in_channels and s == 1 else None
|
| 1258 |
+
self.rbr_dense = OREPA_3x3_RepConv(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=k, stride=s, padding=padding, groups=groups, dilation=1)
|
| 1259 |
+
self.rbr_1x1 = ConvBN(in_channels=self.in_channels, out_channels=self.out_channels, kernel_size=1, stride=s, padding=padding_11, groups=groups, dilation=1)
|
| 1260 |
+
print('RepVGG Block, identity = ', self.rbr_identity)
|
| 1261 |
+
|
| 1262 |
+
|
| 1263 |
+
def forward(self, inputs):
|
| 1264 |
+
if hasattr(self, 'rbr_reparam'):
|
| 1265 |
+
return self.nonlinearity(self.se(self.rbr_reparam(inputs)))
|
| 1266 |
+
|
| 1267 |
+
if self.rbr_identity is None:
|
| 1268 |
+
id_out = 0
|
| 1269 |
+
else:
|
| 1270 |
+
id_out = self.rbr_identity(inputs)
|
| 1271 |
+
|
| 1272 |
+
out1 = self.rbr_dense(inputs)
|
| 1273 |
+
out2 = self.rbr_1x1(inputs)
|
| 1274 |
+
out3 = id_out
|
| 1275 |
+
out = out1 + out2 + out3
|
| 1276 |
+
|
| 1277 |
+
return self.nonlinearity(self.se(out))
|
| 1278 |
+
|
| 1279 |
+
|
| 1280 |
+
# Optional. This improves the accuracy and facilitates quantization.
|
| 1281 |
+
# 1. Cancel the original weight decay on rbr_dense.conv.weight and rbr_1x1.conv.weight.
|
| 1282 |
+
# 2. Use like this.
|
| 1283 |
+
# loss = criterion(....)
|
| 1284 |
+
# for every RepVGGBlock blk:
|
| 1285 |
+
# loss += weight_decay_coefficient * 0.5 * blk.get_cust_L2()
|
| 1286 |
+
# optimizer.zero_grad()
|
| 1287 |
+
# loss.backward()
|
| 1288 |
+
|
| 1289 |
+
# Not used for OREPA
|
| 1290 |
+
def get_custom_L2(self):
|
| 1291 |
+
K3 = self.rbr_dense.weight_gen()
|
| 1292 |
+
K1 = self.rbr_1x1.conv.weight
|
| 1293 |
+
t3 = (self.rbr_dense.bn.weight / ((self.rbr_dense.bn.running_var + self.rbr_dense.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
|
| 1294 |
+
t1 = (self.rbr_1x1.bn.weight / ((self.rbr_1x1.bn.running_var + self.rbr_1x1.bn.eps).sqrt())).reshape(-1, 1, 1, 1).detach()
|
| 1295 |
+
|
| 1296 |
+
l2_loss_circle = (K3 ** 2).sum() - (K3[:, :, 1:2, 1:2] ** 2).sum() # The L2 loss of the "circle" of weights in 3x3 kernel. Use regular L2 on them.
|
| 1297 |
+
eq_kernel = K3[:, :, 1:2, 1:2] * t3 + K1 * t1 # The equivalent resultant central point of 3x3 kernel.
|
| 1298 |
+
l2_loss_eq_kernel = (eq_kernel ** 2 / (t3 ** 2 + t1 ** 2)).sum() # Normalize for an L2 coefficient comparable to regular L2.
|
| 1299 |
+
return l2_loss_eq_kernel + l2_loss_circle
|
| 1300 |
+
|
| 1301 |
+
def get_equivalent_kernel_bias(self):
|
| 1302 |
+
kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
|
| 1303 |
+
kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
|
| 1304 |
+
kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
|
| 1305 |
+
return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
|
| 1306 |
+
|
| 1307 |
+
def _pad_1x1_to_3x3_tensor(self, kernel1x1):
|
| 1308 |
+
if kernel1x1 is None:
|
| 1309 |
+
return 0
|
| 1310 |
+
else:
|
| 1311 |
+
return torch.nn.functional.pad(kernel1x1, [1,1,1,1])
|
| 1312 |
+
|
| 1313 |
+
def _fuse_bn_tensor(self, branch):
|
| 1314 |
+
if branch is None:
|
| 1315 |
+
return 0, 0
|
| 1316 |
+
if not isinstance(branch, nn.BatchNorm2d):
|
| 1317 |
+
if isinstance(branch, OREPA_3x3_RepConv):
|
| 1318 |
+
kernel = branch.weight_gen()
|
| 1319 |
+
elif isinstance(branch, ConvBN):
|
| 1320 |
+
kernel = branch.conv.weight
|
| 1321 |
+
else:
|
| 1322 |
+
raise NotImplementedError
|
| 1323 |
+
running_mean = branch.bn.running_mean
|
| 1324 |
+
running_var = branch.bn.running_var
|
| 1325 |
+
gamma = branch.bn.weight
|
| 1326 |
+
beta = branch.bn.bias
|
| 1327 |
+
eps = branch.bn.eps
|
| 1328 |
+
else:
|
| 1329 |
+
if not hasattr(self, 'id_tensor'):
|
| 1330 |
+
input_dim = self.in_channels // self.groups
|
| 1331 |
+
kernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)
|
| 1332 |
+
for i in range(self.in_channels):
|
| 1333 |
+
kernel_value[i, i % input_dim, 1, 1] = 1
|
| 1334 |
+
self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
|
| 1335 |
+
kernel = self.id_tensor
|
| 1336 |
+
running_mean = branch.running_mean
|
| 1337 |
+
running_var = branch.running_var
|
| 1338 |
+
gamma = branch.weight
|
| 1339 |
+
beta = branch.bias
|
| 1340 |
+
eps = branch.eps
|
| 1341 |
+
std = (running_var + eps).sqrt()
|
| 1342 |
+
t = (gamma / std).reshape(-1, 1, 1, 1)
|
| 1343 |
+
return kernel * t, beta - running_mean * gamma / std
|
| 1344 |
+
|
| 1345 |
+
def switch_to_deploy(self):
|
| 1346 |
+
if hasattr(self, 'rbr_reparam'):
|
| 1347 |
+
return
|
| 1348 |
+
print(f"RepConv_OREPA.switch_to_deploy")
|
| 1349 |
+
kernel, bias = self.get_equivalent_kernel_bias()
|
| 1350 |
+
self.rbr_reparam = nn.Conv2d(in_channels=self.rbr_dense.in_channels, out_channels=self.rbr_dense.out_channels,
|
| 1351 |
+
kernel_size=self.rbr_dense.kernel_size, stride=self.rbr_dense.stride,
|
| 1352 |
+
padding=self.rbr_dense.padding, dilation=self.rbr_dense.dilation, groups=self.rbr_dense.groups, bias=True)
|
| 1353 |
+
self.rbr_reparam.weight.data = kernel
|
| 1354 |
+
self.rbr_reparam.bias.data = bias
|
| 1355 |
+
for para in self.parameters():
|
| 1356 |
+
para.detach_()
|
| 1357 |
+
self.__delattr__('rbr_dense')
|
| 1358 |
+
self.__delattr__('rbr_1x1')
|
| 1359 |
+
if hasattr(self, 'rbr_identity'):
|
| 1360 |
+
self.__delattr__('rbr_identity')
|
| 1361 |
+
|
| 1362 |
+
##### end of orepa #####
|
| 1363 |
+
|
| 1364 |
+
|
| 1365 |
+
##### swin transformer #####
|
| 1366 |
+
|
| 1367 |
+
class WindowAttention(nn.Module):
|
| 1368 |
+
|
| 1369 |
+
def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
|
| 1370 |
+
|
| 1371 |
+
super().__init__()
|
| 1372 |
+
self.dim = dim
|
| 1373 |
+
self.window_size = window_size # Wh, Ww
|
| 1374 |
+
self.num_heads = num_heads
|
| 1375 |
+
head_dim = dim // num_heads
|
| 1376 |
+
self.scale = qk_scale or head_dim ** -0.5
|
| 1377 |
+
|
| 1378 |
+
# define a parameter table of relative position bias
|
| 1379 |
+
self.relative_position_bias_table = nn.Parameter(
|
| 1380 |
+
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
|
| 1381 |
+
|
| 1382 |
+
# get pair-wise relative position index for each token inside the window
|
| 1383 |
+
coords_h = torch.arange(self.window_size[0])
|
| 1384 |
+
coords_w = torch.arange(self.window_size[1])
|
| 1385 |
+
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
|
| 1386 |
+
coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
|
| 1387 |
+
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
|
| 1388 |
+
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
|
| 1389 |
+
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
|
| 1390 |
+
relative_coords[:, :, 1] += self.window_size[1] - 1
|
| 1391 |
+
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
|
| 1392 |
+
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
|
| 1393 |
+
self.register_buffer("relative_position_index", relative_position_index)
|
| 1394 |
+
|
| 1395 |
+
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
|
| 1396 |
+
self.attn_drop = nn.Dropout(attn_drop)
|
| 1397 |
+
self.proj = nn.Linear(dim, dim)
|
| 1398 |
+
self.proj_drop = nn.Dropout(proj_drop)
|
| 1399 |
+
|
| 1400 |
+
nn.init.normal_(self.relative_position_bias_table, std=.02)
|
| 1401 |
+
self.softmax = nn.Softmax(dim=-1)
|
| 1402 |
+
|
| 1403 |
+
def forward(self, x, mask=None):
|
| 1404 |
+
|
| 1405 |
+
B_, N, C = x.shape
|
| 1406 |
+
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
|
| 1407 |
+
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
|
| 1408 |
+
|
| 1409 |
+
q = q * self.scale
|
| 1410 |
+
attn = (q @ k.transpose(-2, -1))
|
| 1411 |
+
|
| 1412 |
+
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
|
| 1413 |
+
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
|
| 1414 |
+
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
|
| 1415 |
+
attn = attn + relative_position_bias.unsqueeze(0)
|
| 1416 |
+
|
| 1417 |
+
if mask is not None:
|
| 1418 |
+
nW = mask.shape[0]
|
| 1419 |
+
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
|
| 1420 |
+
attn = attn.view(-1, self.num_heads, N, N)
|
| 1421 |
+
attn = self.softmax(attn)
|
| 1422 |
+
else:
|
| 1423 |
+
attn = self.softmax(attn)
|
| 1424 |
+
|
| 1425 |
+
attn = self.attn_drop(attn)
|
| 1426 |
+
|
| 1427 |
+
# print(attn.dtype, v.dtype)
|
| 1428 |
+
try:
|
| 1429 |
+
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
|
| 1430 |
+
except:
|
| 1431 |
+
#print(attn.dtype, v.dtype)
|
| 1432 |
+
x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
|
| 1433 |
+
x = self.proj(x)
|
| 1434 |
+
x = self.proj_drop(x)
|
| 1435 |
+
return x
|
| 1436 |
+
|
| 1437 |
+
class Mlp(nn.Module):
|
| 1438 |
+
|
| 1439 |
+
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
|
| 1440 |
+
super().__init__()
|
| 1441 |
+
out_features = out_features or in_features
|
| 1442 |
+
hidden_features = hidden_features or in_features
|
| 1443 |
+
self.fc1 = nn.Linear(in_features, hidden_features)
|
| 1444 |
+
self.act = act_layer()
|
| 1445 |
+
self.fc2 = nn.Linear(hidden_features, out_features)
|
| 1446 |
+
self.drop = nn.Dropout(drop)
|
| 1447 |
+
|
| 1448 |
+
def forward(self, x):
|
| 1449 |
+
x = self.fc1(x)
|
| 1450 |
+
x = self.act(x)
|
| 1451 |
+
x = self.drop(x)
|
| 1452 |
+
x = self.fc2(x)
|
| 1453 |
+
x = self.drop(x)
|
| 1454 |
+
return x
|
| 1455 |
+
|
| 1456 |
+
def window_partition(x, window_size):
|
| 1457 |
+
|
| 1458 |
+
B, H, W, C = x.shape
|
| 1459 |
+
assert H % window_size == 0, 'feature map h and w can not divide by window size'
|
| 1460 |
+
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
|
| 1461 |
+
windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
|
| 1462 |
+
return windows
|
| 1463 |
+
|
| 1464 |
+
def window_reverse(windows, window_size, H, W):
|
| 1465 |
+
|
| 1466 |
+
B = int(windows.shape[0] / (H * W / window_size / window_size))
|
| 1467 |
+
x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
|
| 1468 |
+
x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
|
| 1469 |
+
return x
|
| 1470 |
+
|
| 1471 |
+
|
| 1472 |
+
class SwinTransformerLayer(nn.Module):
|
| 1473 |
+
|
| 1474 |
+
def __init__(self, dim, num_heads, window_size=8, shift_size=0,
|
| 1475 |
+
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
|
| 1476 |
+
act_layer=nn.SiLU, norm_layer=nn.LayerNorm):
|
| 1477 |
+
super().__init__()
|
| 1478 |
+
self.dim = dim
|
| 1479 |
+
self.num_heads = num_heads
|
| 1480 |
+
self.window_size = window_size
|
| 1481 |
+
self.shift_size = shift_size
|
| 1482 |
+
self.mlp_ratio = mlp_ratio
|
| 1483 |
+
# if min(self.input_resolution) <= self.window_size:
|
| 1484 |
+
# # if window size is larger than input resolution, we don't partition windows
|
| 1485 |
+
# self.shift_size = 0
|
| 1486 |
+
# self.window_size = min(self.input_resolution)
|
| 1487 |
+
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
|
| 1488 |
+
|
| 1489 |
+
self.norm1 = norm_layer(dim)
|
| 1490 |
+
self.attn = WindowAttention(
|
| 1491 |
+
dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
|
| 1492 |
+
qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
|
| 1493 |
+
|
| 1494 |
+
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
|
| 1495 |
+
self.norm2 = norm_layer(dim)
|
| 1496 |
+
mlp_hidden_dim = int(dim * mlp_ratio)
|
| 1497 |
+
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
|
| 1498 |
+
|
| 1499 |
+
def create_mask(self, H, W):
|
| 1500 |
+
# calculate attention mask for SW-MSA
|
| 1501 |
+
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
|
| 1502 |
+
h_slices = (slice(0, -self.window_size),
|
| 1503 |
+
slice(-self.window_size, -self.shift_size),
|
| 1504 |
+
slice(-self.shift_size, None))
|
| 1505 |
+
w_slices = (slice(0, -self.window_size),
|
| 1506 |
+
slice(-self.window_size, -self.shift_size),
|
| 1507 |
+
slice(-self.shift_size, None))
|
| 1508 |
+
cnt = 0
|
| 1509 |
+
for h in h_slices:
|
| 1510 |
+
for w in w_slices:
|
| 1511 |
+
img_mask[:, h, w, :] = cnt
|
| 1512 |
+
cnt += 1
|
| 1513 |
+
|
| 1514 |
+
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
|
| 1515 |
+
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
|
| 1516 |
+
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
|
| 1517 |
+
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
|
| 1518 |
+
|
| 1519 |
+
return attn_mask
|
| 1520 |
+
|
| 1521 |
+
def forward(self, x):
|
| 1522 |
+
# reshape x[b c h w] to x[b l c]
|
| 1523 |
+
_, _, H_, W_ = x.shape
|
| 1524 |
+
|
| 1525 |
+
Padding = False
|
| 1526 |
+
if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
|
| 1527 |
+
Padding = True
|
| 1528 |
+
# print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
|
| 1529 |
+
pad_r = (self.window_size - W_ % self.window_size) % self.window_size
|
| 1530 |
+
pad_b = (self.window_size - H_ % self.window_size) % self.window_size
|
| 1531 |
+
x = F.pad(x, (0, pad_r, 0, pad_b))
|
| 1532 |
+
|
| 1533 |
+
# print('2', x.shape)
|
| 1534 |
+
B, C, H, W = x.shape
|
| 1535 |
+
L = H * W
|
| 1536 |
+
x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
|
| 1537 |
+
|
| 1538 |
+
# create mask from init to forward
|
| 1539 |
+
if self.shift_size > 0:
|
| 1540 |
+
attn_mask = self.create_mask(H, W).to(x.device)
|
| 1541 |
+
else:
|
| 1542 |
+
attn_mask = None
|
| 1543 |
+
|
| 1544 |
+
shortcut = x
|
| 1545 |
+
x = self.norm1(x)
|
| 1546 |
+
x = x.view(B, H, W, C)
|
| 1547 |
+
|
| 1548 |
+
# cyclic shift
|
| 1549 |
+
if self.shift_size > 0:
|
| 1550 |
+
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
|
| 1551 |
+
else:
|
| 1552 |
+
shifted_x = x
|
| 1553 |
+
|
| 1554 |
+
# partition windows
|
| 1555 |
+
x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
|
| 1556 |
+
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
|
| 1557 |
+
|
| 1558 |
+
# W-MSA/SW-MSA
|
| 1559 |
+
attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
|
| 1560 |
+
|
| 1561 |
+
# merge windows
|
| 1562 |
+
attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
|
| 1563 |
+
shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
|
| 1564 |
+
|
| 1565 |
+
# reverse cyclic shift
|
| 1566 |
+
if self.shift_size > 0:
|
| 1567 |
+
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
|
| 1568 |
+
else:
|
| 1569 |
+
x = shifted_x
|
| 1570 |
+
x = x.view(B, H * W, C)
|
| 1571 |
+
|
| 1572 |
+
# FFN
|
| 1573 |
+
x = shortcut + self.drop_path(x)
|
| 1574 |
+
x = x + self.drop_path(self.mlp(self.norm2(x)))
|
| 1575 |
+
|
| 1576 |
+
x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
|
| 1577 |
+
|
| 1578 |
+
if Padding:
|
| 1579 |
+
x = x[:, :, :H_, :W_] # reverse padding
|
| 1580 |
+
|
| 1581 |
+
return x
|
| 1582 |
+
|
| 1583 |
+
|
| 1584 |
+
class SwinTransformerBlock(nn.Module):
|
| 1585 |
+
def __init__(self, c1, c2, num_heads, num_layers, window_size=8):
|
| 1586 |
+
super().__init__()
|
| 1587 |
+
self.conv = None
|
| 1588 |
+
if c1 != c2:
|
| 1589 |
+
self.conv = Conv(c1, c2)
|
| 1590 |
+
|
| 1591 |
+
# remove input_resolution
|
| 1592 |
+
self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,
|
| 1593 |
+
shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
|
| 1594 |
+
|
| 1595 |
+
def forward(self, x):
|
| 1596 |
+
if self.conv is not None:
|
| 1597 |
+
x = self.conv(x)
|
| 1598 |
+
x = self.blocks(x)
|
| 1599 |
+
return x
|
| 1600 |
+
|
| 1601 |
+
|
| 1602 |
+
class STCSPA(nn.Module):
|
| 1603 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 1604 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 1605 |
+
super(STCSPA, self).__init__()
|
| 1606 |
+
c_ = int(c2 * e) # hidden channels
|
| 1607 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 1608 |
+
self.cv2 = Conv(c1, c_, 1, 1)
|
| 1609 |
+
self.cv3 = Conv(2 * c_, c2, 1, 1)
|
| 1610 |
+
num_heads = c_ // 32
|
| 1611 |
+
self.m = SwinTransformerBlock(c_, c_, num_heads, n)
|
| 1612 |
+
#self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 1613 |
+
|
| 1614 |
+
def forward(self, x):
|
| 1615 |
+
y1 = self.m(self.cv1(x))
|
| 1616 |
+
y2 = self.cv2(x)
|
| 1617 |
+
return self.cv3(torch.cat((y1, y2), dim=1))
|
| 1618 |
+
|
| 1619 |
+
|
| 1620 |
+
class STCSPB(nn.Module):
|
| 1621 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 1622 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 1623 |
+
super(STCSPB, self).__init__()
|
| 1624 |
+
c_ = int(c2) # hidden channels
|
| 1625 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 1626 |
+
self.cv2 = Conv(c_, c_, 1, 1)
|
| 1627 |
+
self.cv3 = Conv(2 * c_, c2, 1, 1)
|
| 1628 |
+
num_heads = c_ // 32
|
| 1629 |
+
self.m = SwinTransformerBlock(c_, c_, num_heads, n)
|
| 1630 |
+
#self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 1631 |
+
|
| 1632 |
+
def forward(self, x):
|
| 1633 |
+
x1 = self.cv1(x)
|
| 1634 |
+
y1 = self.m(x1)
|
| 1635 |
+
y2 = self.cv2(x1)
|
| 1636 |
+
return self.cv3(torch.cat((y1, y2), dim=1))
|
| 1637 |
+
|
| 1638 |
+
|
| 1639 |
+
class STCSPC(nn.Module):
|
| 1640 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 1641 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 1642 |
+
super(STCSPC, self).__init__()
|
| 1643 |
+
c_ = int(c2 * e) # hidden channels
|
| 1644 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 1645 |
+
self.cv2 = Conv(c1, c_, 1, 1)
|
| 1646 |
+
self.cv3 = Conv(c_, c_, 1, 1)
|
| 1647 |
+
self.cv4 = Conv(2 * c_, c2, 1, 1)
|
| 1648 |
+
num_heads = c_ // 32
|
| 1649 |
+
self.m = SwinTransformerBlock(c_, c_, num_heads, n)
|
| 1650 |
+
#self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 1651 |
+
|
| 1652 |
+
def forward(self, x):
|
| 1653 |
+
y1 = self.cv3(self.m(self.cv1(x)))
|
| 1654 |
+
y2 = self.cv2(x)
|
| 1655 |
+
return self.cv4(torch.cat((y1, y2), dim=1))
|
| 1656 |
+
|
| 1657 |
+
##### end of swin transformer #####
|
| 1658 |
+
|
| 1659 |
+
|
| 1660 |
+
##### swin transformer v2 #####
|
| 1661 |
+
|
| 1662 |
+
class WindowAttention_v2(nn.Module):
|
| 1663 |
+
|
| 1664 |
+
def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.,
|
| 1665 |
+
pretrained_window_size=[0, 0]):
|
| 1666 |
+
|
| 1667 |
+
super().__init__()
|
| 1668 |
+
self.dim = dim
|
| 1669 |
+
self.window_size = window_size # Wh, Ww
|
| 1670 |
+
self.pretrained_window_size = pretrained_window_size
|
| 1671 |
+
self.num_heads = num_heads
|
| 1672 |
+
|
| 1673 |
+
self.logit_scale = nn.Parameter(torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True)
|
| 1674 |
+
|
| 1675 |
+
# mlp to generate continuous relative position bias
|
| 1676 |
+
self.cpb_mlp = nn.Sequential(nn.Linear(2, 512, bias=True),
|
| 1677 |
+
nn.ReLU(inplace=True),
|
| 1678 |
+
nn.Linear(512, num_heads, bias=False))
|
| 1679 |
+
|
| 1680 |
+
# get relative_coords_table
|
| 1681 |
+
relative_coords_h = torch.arange(-(self.window_size[0] - 1), self.window_size[0], dtype=torch.float32)
|
| 1682 |
+
relative_coords_w = torch.arange(-(self.window_size[1] - 1), self.window_size[1], dtype=torch.float32)
|
| 1683 |
+
relative_coords_table = torch.stack(
|
| 1684 |
+
torch.meshgrid([relative_coords_h,
|
| 1685 |
+
relative_coords_w])).permute(1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2
|
| 1686 |
+
if pretrained_window_size[0] > 0:
|
| 1687 |
+
relative_coords_table[:, :, :, 0] /= (pretrained_window_size[0] - 1)
|
| 1688 |
+
relative_coords_table[:, :, :, 1] /= (pretrained_window_size[1] - 1)
|
| 1689 |
+
else:
|
| 1690 |
+
relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1)
|
| 1691 |
+
relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1)
|
| 1692 |
+
relative_coords_table *= 8 # normalize to -8, 8
|
| 1693 |
+
relative_coords_table = torch.sign(relative_coords_table) * torch.log2(
|
| 1694 |
+
torch.abs(relative_coords_table) + 1.0) / np.log2(8)
|
| 1695 |
+
|
| 1696 |
+
self.register_buffer("relative_coords_table", relative_coords_table)
|
| 1697 |
+
|
| 1698 |
+
# get pair-wise relative position index for each token inside the window
|
| 1699 |
+
coords_h = torch.arange(self.window_size[0])
|
| 1700 |
+
coords_w = torch.arange(self.window_size[1])
|
| 1701 |
+
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
|
| 1702 |
+
coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
|
| 1703 |
+
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
|
| 1704 |
+
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
|
| 1705 |
+
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
|
| 1706 |
+
relative_coords[:, :, 1] += self.window_size[1] - 1
|
| 1707 |
+
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
|
| 1708 |
+
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
|
| 1709 |
+
self.register_buffer("relative_position_index", relative_position_index)
|
| 1710 |
+
|
| 1711 |
+
self.qkv = nn.Linear(dim, dim * 3, bias=False)
|
| 1712 |
+
if qkv_bias:
|
| 1713 |
+
self.q_bias = nn.Parameter(torch.zeros(dim))
|
| 1714 |
+
self.v_bias = nn.Parameter(torch.zeros(dim))
|
| 1715 |
+
else:
|
| 1716 |
+
self.q_bias = None
|
| 1717 |
+
self.v_bias = None
|
| 1718 |
+
self.attn_drop = nn.Dropout(attn_drop)
|
| 1719 |
+
self.proj = nn.Linear(dim, dim)
|
| 1720 |
+
self.proj_drop = nn.Dropout(proj_drop)
|
| 1721 |
+
self.softmax = nn.Softmax(dim=-1)
|
| 1722 |
+
|
| 1723 |
+
def forward(self, x, mask=None):
|
| 1724 |
+
|
| 1725 |
+
B_, N, C = x.shape
|
| 1726 |
+
qkv_bias = None
|
| 1727 |
+
if self.q_bias is not None:
|
| 1728 |
+
qkv_bias = torch.cat((self.q_bias, torch.zeros_like(self.v_bias, requires_grad=False), self.v_bias))
|
| 1729 |
+
qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias)
|
| 1730 |
+
qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4)
|
| 1731 |
+
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
|
| 1732 |
+
|
| 1733 |
+
# cosine attention
|
| 1734 |
+
attn = (F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1))
|
| 1735 |
+
logit_scale = torch.clamp(self.logit_scale, max=torch.log(torch.tensor(1. / 0.01))).exp()
|
| 1736 |
+
attn = attn * logit_scale
|
| 1737 |
+
|
| 1738 |
+
relative_position_bias_table = self.cpb_mlp(self.relative_coords_table).view(-1, self.num_heads)
|
| 1739 |
+
relative_position_bias = relative_position_bias_table[self.relative_position_index.view(-1)].view(
|
| 1740 |
+
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
|
| 1741 |
+
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
|
| 1742 |
+
relative_position_bias = 16 * torch.sigmoid(relative_position_bias)
|
| 1743 |
+
attn = attn + relative_position_bias.unsqueeze(0)
|
| 1744 |
+
|
| 1745 |
+
if mask is not None:
|
| 1746 |
+
nW = mask.shape[0]
|
| 1747 |
+
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
|
| 1748 |
+
attn = attn.view(-1, self.num_heads, N, N)
|
| 1749 |
+
attn = self.softmax(attn)
|
| 1750 |
+
else:
|
| 1751 |
+
attn = self.softmax(attn)
|
| 1752 |
+
|
| 1753 |
+
attn = self.attn_drop(attn)
|
| 1754 |
+
|
| 1755 |
+
try:
|
| 1756 |
+
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
|
| 1757 |
+
except:
|
| 1758 |
+
x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)
|
| 1759 |
+
|
| 1760 |
+
x = self.proj(x)
|
| 1761 |
+
x = self.proj_drop(x)
|
| 1762 |
+
return x
|
| 1763 |
+
|
| 1764 |
+
def extra_repr(self) -> str:
|
| 1765 |
+
return f'dim={self.dim}, window_size={self.window_size}, ' \
|
| 1766 |
+
f'pretrained_window_size={self.pretrained_window_size}, num_heads={self.num_heads}'
|
| 1767 |
+
|
| 1768 |
+
def flops(self, N):
|
| 1769 |
+
# calculate flops for 1 window with token length of N
|
| 1770 |
+
flops = 0
|
| 1771 |
+
# qkv = self.qkv(x)
|
| 1772 |
+
flops += N * self.dim * 3 * self.dim
|
| 1773 |
+
# attn = (q @ k.transpose(-2, -1))
|
| 1774 |
+
flops += self.num_heads * N * (self.dim // self.num_heads) * N
|
| 1775 |
+
# x = (attn @ v)
|
| 1776 |
+
flops += self.num_heads * N * N * (self.dim // self.num_heads)
|
| 1777 |
+
# x = self.proj(x)
|
| 1778 |
+
flops += N * self.dim * self.dim
|
| 1779 |
+
return flops
|
| 1780 |
+
|
| 1781 |
+
class Mlp_v2(nn.Module):
|
| 1782 |
+
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):
|
| 1783 |
+
super().__init__()
|
| 1784 |
+
out_features = out_features or in_features
|
| 1785 |
+
hidden_features = hidden_features or in_features
|
| 1786 |
+
self.fc1 = nn.Linear(in_features, hidden_features)
|
| 1787 |
+
self.act = act_layer()
|
| 1788 |
+
self.fc2 = nn.Linear(hidden_features, out_features)
|
| 1789 |
+
self.drop = nn.Dropout(drop)
|
| 1790 |
+
|
| 1791 |
+
def forward(self, x):
|
| 1792 |
+
x = self.fc1(x)
|
| 1793 |
+
x = self.act(x)
|
| 1794 |
+
x = self.drop(x)
|
| 1795 |
+
x = self.fc2(x)
|
| 1796 |
+
x = self.drop(x)
|
| 1797 |
+
return x
|
| 1798 |
+
|
| 1799 |
+
|
| 1800 |
+
def window_partition_v2(x, window_size):
|
| 1801 |
+
|
| 1802 |
+
B, H, W, C = x.shape
|
| 1803 |
+
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
|
| 1804 |
+
windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
|
| 1805 |
+
return windows
|
| 1806 |
+
|
| 1807 |
+
|
| 1808 |
+
def window_reverse_v2(windows, window_size, H, W):
|
| 1809 |
+
|
| 1810 |
+
B = int(windows.shape[0] / (H * W / window_size / window_size))
|
| 1811 |
+
x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
|
| 1812 |
+
x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
|
| 1813 |
+
return x
|
| 1814 |
+
|
| 1815 |
+
|
| 1816 |
+
class SwinTransformerLayer_v2(nn.Module):
|
| 1817 |
+
|
| 1818 |
+
def __init__(self, dim, num_heads, window_size=7, shift_size=0,
|
| 1819 |
+
mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,
|
| 1820 |
+
act_layer=nn.SiLU, norm_layer=nn.LayerNorm, pretrained_window_size=0):
|
| 1821 |
+
super().__init__()
|
| 1822 |
+
self.dim = dim
|
| 1823 |
+
#self.input_resolution = input_resolution
|
| 1824 |
+
self.num_heads = num_heads
|
| 1825 |
+
self.window_size = window_size
|
| 1826 |
+
self.shift_size = shift_size
|
| 1827 |
+
self.mlp_ratio = mlp_ratio
|
| 1828 |
+
#if min(self.input_resolution) <= self.window_size:
|
| 1829 |
+
# # if window size is larger than input resolution, we don't partition windows
|
| 1830 |
+
# self.shift_size = 0
|
| 1831 |
+
# self.window_size = min(self.input_resolution)
|
| 1832 |
+
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
|
| 1833 |
+
|
| 1834 |
+
self.norm1 = norm_layer(dim)
|
| 1835 |
+
self.attn = WindowAttention_v2(
|
| 1836 |
+
dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,
|
| 1837 |
+
qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop,
|
| 1838 |
+
pretrained_window_size=(pretrained_window_size, pretrained_window_size))
|
| 1839 |
+
|
| 1840 |
+
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
|
| 1841 |
+
self.norm2 = norm_layer(dim)
|
| 1842 |
+
mlp_hidden_dim = int(dim * mlp_ratio)
|
| 1843 |
+
self.mlp = Mlp_v2(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
|
| 1844 |
+
|
| 1845 |
+
def create_mask(self, H, W):
|
| 1846 |
+
# calculate attention mask for SW-MSA
|
| 1847 |
+
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
|
| 1848 |
+
h_slices = (slice(0, -self.window_size),
|
| 1849 |
+
slice(-self.window_size, -self.shift_size),
|
| 1850 |
+
slice(-self.shift_size, None))
|
| 1851 |
+
w_slices = (slice(0, -self.window_size),
|
| 1852 |
+
slice(-self.window_size, -self.shift_size),
|
| 1853 |
+
slice(-self.shift_size, None))
|
| 1854 |
+
cnt = 0
|
| 1855 |
+
for h in h_slices:
|
| 1856 |
+
for w in w_slices:
|
| 1857 |
+
img_mask[:, h, w, :] = cnt
|
| 1858 |
+
cnt += 1
|
| 1859 |
+
|
| 1860 |
+
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
|
| 1861 |
+
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
|
| 1862 |
+
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
|
| 1863 |
+
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
|
| 1864 |
+
|
| 1865 |
+
return attn_mask
|
| 1866 |
+
|
| 1867 |
+
def forward(self, x):
|
| 1868 |
+
# reshape x[b c h w] to x[b l c]
|
| 1869 |
+
_, _, H_, W_ = x.shape
|
| 1870 |
+
|
| 1871 |
+
Padding = False
|
| 1872 |
+
if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0:
|
| 1873 |
+
Padding = True
|
| 1874 |
+
# print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')
|
| 1875 |
+
pad_r = (self.window_size - W_ % self.window_size) % self.window_size
|
| 1876 |
+
pad_b = (self.window_size - H_ % self.window_size) % self.window_size
|
| 1877 |
+
x = F.pad(x, (0, pad_r, 0, pad_b))
|
| 1878 |
+
|
| 1879 |
+
# print('2', x.shape)
|
| 1880 |
+
B, C, H, W = x.shape
|
| 1881 |
+
L = H * W
|
| 1882 |
+
x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c
|
| 1883 |
+
|
| 1884 |
+
# create mask from init to forward
|
| 1885 |
+
if self.shift_size > 0:
|
| 1886 |
+
attn_mask = self.create_mask(H, W).to(x.device)
|
| 1887 |
+
else:
|
| 1888 |
+
attn_mask = None
|
| 1889 |
+
|
| 1890 |
+
shortcut = x
|
| 1891 |
+
x = x.view(B, H, W, C)
|
| 1892 |
+
|
| 1893 |
+
# cyclic shift
|
| 1894 |
+
if self.shift_size > 0:
|
| 1895 |
+
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
|
| 1896 |
+
else:
|
| 1897 |
+
shifted_x = x
|
| 1898 |
+
|
| 1899 |
+
# partition windows
|
| 1900 |
+
x_windows = window_partition_v2(shifted_x, self.window_size) # nW*B, window_size, window_size, C
|
| 1901 |
+
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
|
| 1902 |
+
|
| 1903 |
+
# W-MSA/SW-MSA
|
| 1904 |
+
attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C
|
| 1905 |
+
|
| 1906 |
+
# merge windows
|
| 1907 |
+
attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
|
| 1908 |
+
shifted_x = window_reverse_v2(attn_windows, self.window_size, H, W) # B H' W' C
|
| 1909 |
+
|
| 1910 |
+
# reverse cyclic shift
|
| 1911 |
+
if self.shift_size > 0:
|
| 1912 |
+
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
|
| 1913 |
+
else:
|
| 1914 |
+
x = shifted_x
|
| 1915 |
+
x = x.view(B, H * W, C)
|
| 1916 |
+
x = shortcut + self.drop_path(self.norm1(x))
|
| 1917 |
+
|
| 1918 |
+
# FFN
|
| 1919 |
+
x = x + self.drop_path(self.norm2(self.mlp(x)))
|
| 1920 |
+
x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w
|
| 1921 |
+
|
| 1922 |
+
if Padding:
|
| 1923 |
+
x = x[:, :, :H_, :W_] # reverse padding
|
| 1924 |
+
|
| 1925 |
+
return x
|
| 1926 |
+
|
| 1927 |
+
def extra_repr(self) -> str:
|
| 1928 |
+
return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
|
| 1929 |
+
f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
|
| 1930 |
+
|
| 1931 |
+
def flops(self):
|
| 1932 |
+
flops = 0
|
| 1933 |
+
H, W = self.input_resolution
|
| 1934 |
+
# norm1
|
| 1935 |
+
flops += self.dim * H * W
|
| 1936 |
+
# W-MSA/SW-MSA
|
| 1937 |
+
nW = H * W / self.window_size / self.window_size
|
| 1938 |
+
flops += nW * self.attn.flops(self.window_size * self.window_size)
|
| 1939 |
+
# mlp
|
| 1940 |
+
flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
|
| 1941 |
+
# norm2
|
| 1942 |
+
flops += self.dim * H * W
|
| 1943 |
+
return flops
|
| 1944 |
+
|
| 1945 |
+
|
| 1946 |
+
class SwinTransformer2Block(nn.Module):
|
| 1947 |
+
def __init__(self, c1, c2, num_heads, num_layers, window_size=7):
|
| 1948 |
+
super().__init__()
|
| 1949 |
+
self.conv = None
|
| 1950 |
+
if c1 != c2:
|
| 1951 |
+
self.conv = Conv(c1, c2)
|
| 1952 |
+
|
| 1953 |
+
# remove input_resolution
|
| 1954 |
+
self.blocks = nn.Sequential(*[SwinTransformerLayer_v2(dim=c2, num_heads=num_heads, window_size=window_size,
|
| 1955 |
+
shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)])
|
| 1956 |
+
|
| 1957 |
+
def forward(self, x):
|
| 1958 |
+
if self.conv is not None:
|
| 1959 |
+
x = self.conv(x)
|
| 1960 |
+
x = self.blocks(x)
|
| 1961 |
+
return x
|
| 1962 |
+
|
| 1963 |
+
|
| 1964 |
+
class ST2CSPA(nn.Module):
|
| 1965 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 1966 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 1967 |
+
super(ST2CSPA, self).__init__()
|
| 1968 |
+
c_ = int(c2 * e) # hidden channels
|
| 1969 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 1970 |
+
self.cv2 = Conv(c1, c_, 1, 1)
|
| 1971 |
+
self.cv3 = Conv(2 * c_, c2, 1, 1)
|
| 1972 |
+
num_heads = c_ // 32
|
| 1973 |
+
self.m = SwinTransformer2Block(c_, c_, num_heads, n)
|
| 1974 |
+
#self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 1975 |
+
|
| 1976 |
+
def forward(self, x):
|
| 1977 |
+
y1 = self.m(self.cv1(x))
|
| 1978 |
+
y2 = self.cv2(x)
|
| 1979 |
+
return self.cv3(torch.cat((y1, y2), dim=1))
|
| 1980 |
+
|
| 1981 |
+
|
| 1982 |
+
class ST2CSPB(nn.Module):
|
| 1983 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 1984 |
+
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 1985 |
+
super(ST2CSPB, self).__init__()
|
| 1986 |
+
c_ = int(c2) # hidden channels
|
| 1987 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 1988 |
+
self.cv2 = Conv(c_, c_, 1, 1)
|
| 1989 |
+
self.cv3 = Conv(2 * c_, c2, 1, 1)
|
| 1990 |
+
num_heads = c_ // 32
|
| 1991 |
+
self.m = SwinTransformer2Block(c_, c_, num_heads, n)
|
| 1992 |
+
#self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 1993 |
+
|
| 1994 |
+
def forward(self, x):
|
| 1995 |
+
x1 = self.cv1(x)
|
| 1996 |
+
y1 = self.m(x1)
|
| 1997 |
+
y2 = self.cv2(x1)
|
| 1998 |
+
return self.cv3(torch.cat((y1, y2), dim=1))
|
| 1999 |
+
|
| 2000 |
+
|
| 2001 |
+
class ST2CSPC(nn.Module):
|
| 2002 |
+
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
|
| 2003 |
+
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
|
| 2004 |
+
super(ST2CSPC, self).__init__()
|
| 2005 |
+
c_ = int(c2 * e) # hidden channels
|
| 2006 |
+
self.cv1 = Conv(c1, c_, 1, 1)
|
| 2007 |
+
self.cv2 = Conv(c1, c_, 1, 1)
|
| 2008 |
+
self.cv3 = Conv(c_, c_, 1, 1)
|
| 2009 |
+
self.cv4 = Conv(2 * c_, c2, 1, 1)
|
| 2010 |
+
num_heads = c_ // 32
|
| 2011 |
+
self.m = SwinTransformer2Block(c_, c_, num_heads, n)
|
| 2012 |
+
#self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
|
| 2013 |
+
|
| 2014 |
+
def forward(self, x):
|
| 2015 |
+
y1 = self.cv3(self.m(self.cv1(x)))
|
| 2016 |
+
y2 = self.cv2(x)
|
| 2017 |
+
return self.cv4(torch.cat((y1, y2), dim=1))
|
| 2018 |
+
|
| 2019 |
+
##### end of swin transformer v2 #####
|
models/experimental.py
ADDED
|
@@ -0,0 +1,106 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import numpy as np
|
| 2 |
+
import torch
|
| 3 |
+
import torch.nn as nn
|
| 4 |
+
|
| 5 |
+
from models.common import Conv, DWConv
|
| 6 |
+
from utils.google_utils import attempt_download
|
| 7 |
+
|
| 8 |
+
|
| 9 |
+
class CrossConv(nn.Module):
|
| 10 |
+
# Cross Convolution Downsample
|
| 11 |
+
def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):
|
| 12 |
+
# ch_in, ch_out, kernel, stride, groups, expansion, shortcut
|
| 13 |
+
super(CrossConv, self).__init__()
|
| 14 |
+
c_ = int(c2 * e) # hidden channels
|
| 15 |
+
self.cv1 = Conv(c1, c_, (1, k), (1, s))
|
| 16 |
+
self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)
|
| 17 |
+
self.add = shortcut and c1 == c2
|
| 18 |
+
|
| 19 |
+
def forward(self, x):
|
| 20 |
+
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
|
| 21 |
+
|
| 22 |
+
|
| 23 |
+
class Sum(nn.Module):
|
| 24 |
+
# Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070
|
| 25 |
+
def __init__(self, n, weight=False): # n: number of inputs
|
| 26 |
+
super(Sum, self).__init__()
|
| 27 |
+
self.weight = weight # apply weights boolean
|
| 28 |
+
self.iter = range(n - 1) # iter object
|
| 29 |
+
if weight:
|
| 30 |
+
self.w = nn.Parameter(-torch.arange(1., n) / 2, requires_grad=True) # layer weights
|
| 31 |
+
|
| 32 |
+
def forward(self, x):
|
| 33 |
+
y = x[0] # no weight
|
| 34 |
+
if self.weight:
|
| 35 |
+
w = torch.sigmoid(self.w) * 2
|
| 36 |
+
for i in self.iter:
|
| 37 |
+
y = y + x[i + 1] * w[i]
|
| 38 |
+
else:
|
| 39 |
+
for i in self.iter:
|
| 40 |
+
y = y + x[i + 1]
|
| 41 |
+
return y
|
| 42 |
+
|
| 43 |
+
|
| 44 |
+
class MixConv2d(nn.Module):
|
| 45 |
+
# Mixed Depthwise Conv https://arxiv.org/abs/1907.09595
|
| 46 |
+
def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True):
|
| 47 |
+
super(MixConv2d, self).__init__()
|
| 48 |
+
groups = len(k)
|
| 49 |
+
if equal_ch: # equal c_ per group
|
| 50 |
+
i = torch.linspace(0, groups - 1E-6, c2).floor() # c2 indices
|
| 51 |
+
c_ = [(i == g).sum() for g in range(groups)] # intermediate channels
|
| 52 |
+
else: # equal weight.numel() per group
|
| 53 |
+
b = [c2] + [0] * groups
|
| 54 |
+
a = np.eye(groups + 1, groups, k=-1)
|
| 55 |
+
a -= np.roll(a, 1, axis=1)
|
| 56 |
+
a *= np.array(k) ** 2
|
| 57 |
+
a[0] = 1
|
| 58 |
+
c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b
|
| 59 |
+
|
| 60 |
+
self.m = nn.ModuleList([nn.Conv2d(c1, int(c_[g]), k[g], s, k[g] // 2, bias=False) for g in range(groups)])
|
| 61 |
+
self.bn = nn.BatchNorm2d(c2)
|
| 62 |
+
self.act = nn.LeakyReLU(0.1, inplace=True)
|
| 63 |
+
|
| 64 |
+
def forward(self, x):
|
| 65 |
+
return x + self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))
|
| 66 |
+
|
| 67 |
+
|
| 68 |
+
class Ensemble(nn.ModuleList):
|
| 69 |
+
# Ensemble of models
|
| 70 |
+
def __init__(self):
|
| 71 |
+
super(Ensemble, self).__init__()
|
| 72 |
+
|
| 73 |
+
def forward(self, x, augment=False):
|
| 74 |
+
y = []
|
| 75 |
+
for module in self:
|
| 76 |
+
y.append(module(x, augment)[0])
|
| 77 |
+
# y = torch.stack(y).max(0)[0] # max ensemble
|
| 78 |
+
# y = torch.stack(y).mean(0) # mean ensemble
|
| 79 |
+
y = torch.cat(y, 1) # nms ensemble
|
| 80 |
+
return y, None # inference, train output
|
| 81 |
+
|
| 82 |
+
|
| 83 |
+
def attempt_load(weights, map_location=None):
|
| 84 |
+
# Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
|
| 85 |
+
model = Ensemble()
|
| 86 |
+
for w in weights if isinstance(weights, list) else [weights]:
|
| 87 |
+
attempt_download(w)
|
| 88 |
+
ckpt = torch.load(w, map_location=map_location) # load
|
| 89 |
+
model.append(ckpt['ema' if ckpt.get('ema') else 'model'].float().fuse().eval()) # FP32 model
|
| 90 |
+
|
| 91 |
+
# Compatibility updates
|
| 92 |
+
for m in model.modules():
|
| 93 |
+
if type(m) in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
|
| 94 |
+
m.inplace = True # pytorch 1.7.0 compatibility
|
| 95 |
+
elif type(m) is nn.Upsample:
|
| 96 |
+
m.recompute_scale_factor = None # torch 1.11.0 compatibility
|
| 97 |
+
elif type(m) is Conv:
|
| 98 |
+
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
|
| 99 |
+
|
| 100 |
+
if len(model) == 1:
|
| 101 |
+
return model[-1] # return model
|
| 102 |
+
else:
|
| 103 |
+
print('Ensemble created with %s\n' % weights)
|
| 104 |
+
for k in ['names', 'stride']:
|
| 105 |
+
setattr(model, k, getattr(model[-1], k))
|
| 106 |
+
return model # return ensemble
|
models/export.py
ADDED
|
@@ -0,0 +1,98 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import argparse
|
| 2 |
+
import sys
|
| 3 |
+
import time
|
| 4 |
+
|
| 5 |
+
sys.path.append('./') # to run '$ python *.py' files in subdirectories
|
| 6 |
+
|
| 7 |
+
import torch
|
| 8 |
+
import torch.nn as nn
|
| 9 |
+
|
| 10 |
+
import models
|
| 11 |
+
from models.experimental import attempt_load
|
| 12 |
+
from utils.activations import Hardswish, SiLU
|
| 13 |
+
from utils.general import set_logging, check_img_size
|
| 14 |
+
from utils.torch_utils import select_device
|
| 15 |
+
|
| 16 |
+
if __name__ == '__main__':
|
| 17 |
+
parser = argparse.ArgumentParser()
|
| 18 |
+
parser.add_argument('--weights', type=str, default='./yolor-csp-c.pt', help='weights path')
|
| 19 |
+
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='image size') # height, width
|
| 20 |
+
parser.add_argument('--batch-size', type=int, default=1, help='batch size')
|
| 21 |
+
parser.add_argument('--dynamic', action='store_true', help='dynamic ONNX axes')
|
| 22 |
+
parser.add_argument('--grid', action='store_true', help='export Detect() layer grid')
|
| 23 |
+
parser.add_argument('--device', default='cpu', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
|
| 24 |
+
opt = parser.parse_args()
|
| 25 |
+
opt.img_size *= 2 if len(opt.img_size) == 1 else 1 # expand
|
| 26 |
+
print(opt)
|
| 27 |
+
set_logging()
|
| 28 |
+
t = time.time()
|
| 29 |
+
|
| 30 |
+
# Load PyTorch model
|
| 31 |
+
device = select_device(opt.device)
|
| 32 |
+
model = attempt_load(opt.weights, map_location=device) # load FP32 model
|
| 33 |
+
labels = model.names
|
| 34 |
+
|
| 35 |
+
# Checks
|
| 36 |
+
gs = int(max(model.stride)) # grid size (max stride)
|
| 37 |
+
opt.img_size = [check_img_size(x, gs) for x in opt.img_size] # verify img_size are gs-multiples
|
| 38 |
+
|
| 39 |
+
# Input
|
| 40 |
+
img = torch.zeros(opt.batch_size, 3, *opt.img_size).to(device) # image size(1,3,320,192) iDetection
|
| 41 |
+
|
| 42 |
+
# Update model
|
| 43 |
+
for k, m in model.named_modules():
|
| 44 |
+
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
|
| 45 |
+
if isinstance(m, models.common.Conv): # assign export-friendly activations
|
| 46 |
+
if isinstance(m.act, nn.Hardswish):
|
| 47 |
+
m.act = Hardswish()
|
| 48 |
+
elif isinstance(m.act, nn.SiLU):
|
| 49 |
+
m.act = SiLU()
|
| 50 |
+
# elif isinstance(m, models.yolo.Detect):
|
| 51 |
+
# m.forward = m.forward_export # assign forward (optional)
|
| 52 |
+
model.model[-1].export = not opt.grid # set Detect() layer grid export
|
| 53 |
+
y = model(img) # dry run
|
| 54 |
+
|
| 55 |
+
# TorchScript export
|
| 56 |
+
try:
|
| 57 |
+
print('\nStarting TorchScript export with torch %s...' % torch.__version__)
|
| 58 |
+
f = opt.weights.replace('.pt', '.torchscript.pt') # filename
|
| 59 |
+
ts = torch.jit.trace(model, img, strict=False)
|
| 60 |
+
ts.save(f)
|
| 61 |
+
print('TorchScript export success, saved as %s' % f)
|
| 62 |
+
except Exception as e:
|
| 63 |
+
print('TorchScript export failure: %s' % e)
|
| 64 |
+
|
| 65 |
+
# ONNX export
|
| 66 |
+
try:
|
| 67 |
+
import onnx
|
| 68 |
+
|
| 69 |
+
print('\nStarting ONNX export with onnx %s...' % onnx.__version__)
|
| 70 |
+
f = opt.weights.replace('.pt', '.onnx') # filename
|
| 71 |
+
torch.onnx.export(model, img, f, verbose=False, opset_version=12, input_names=['images'],
|
| 72 |
+
output_names=['classes', 'boxes'] if y is None else ['output'],
|
| 73 |
+
dynamic_axes={'images': {0: 'batch', 2: 'height', 3: 'width'}, # size(1,3,640,640)
|
| 74 |
+
'output': {0: 'batch', 2: 'y', 3: 'x'}} if opt.dynamic else None)
|
| 75 |
+
|
| 76 |
+
# Checks
|
| 77 |
+
onnx_model = onnx.load(f) # load onnx model
|
| 78 |
+
onnx.checker.check_model(onnx_model) # check onnx model
|
| 79 |
+
# print(onnx.helper.printable_graph(onnx_model.graph)) # print a human readable model
|
| 80 |
+
print('ONNX export success, saved as %s' % f)
|
| 81 |
+
except Exception as e:
|
| 82 |
+
print('ONNX export failure: %s' % e)
|
| 83 |
+
|
| 84 |
+
# CoreML export
|
| 85 |
+
try:
|
| 86 |
+
import coremltools as ct
|
| 87 |
+
|
| 88 |
+
print('\nStarting CoreML export with coremltools %s...' % ct.__version__)
|
| 89 |
+
# convert model from torchscript and apply pixel scaling as per detect.py
|
| 90 |
+
model = ct.convert(ts, inputs=[ct.ImageType(name='image', shape=img.shape, scale=1 / 255.0, bias=[0, 0, 0])])
|
| 91 |
+
f = opt.weights.replace('.pt', '.mlmodel') # filename
|
| 92 |
+
model.save(f)
|
| 93 |
+
print('CoreML export success, saved as %s' % f)
|
| 94 |
+
except Exception as e:
|
| 95 |
+
print('CoreML export failure: %s' % e)
|
| 96 |
+
|
| 97 |
+
# Finish
|
| 98 |
+
print('\nExport complete (%.2fs). Visualize with https://github.com/lutzroeder/netron.' % (time.time() - t))
|
models/yolo.py
ADDED
|
@@ -0,0 +1,550 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import argparse
|
| 2 |
+
import logging
|
| 3 |
+
import sys
|
| 4 |
+
from copy import deepcopy
|
| 5 |
+
|
| 6 |
+
sys.path.append('./') # to run '$ python *.py' files in subdirectories
|
| 7 |
+
logger = logging.getLogger(__name__)
|
| 8 |
+
|
| 9 |
+
from models.common import *
|
| 10 |
+
from models.experimental import *
|
| 11 |
+
from utils.autoanchor import check_anchor_order
|
| 12 |
+
from utils.general import make_divisible, check_file, set_logging
|
| 13 |
+
from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info, scale_img, initialize_weights, \
|
| 14 |
+
select_device, copy_attr
|
| 15 |
+
from utils.loss import SigmoidBin
|
| 16 |
+
|
| 17 |
+
try:
|
| 18 |
+
import thop # for FLOPS computation
|
| 19 |
+
except ImportError:
|
| 20 |
+
thop = None
|
| 21 |
+
|
| 22 |
+
|
| 23 |
+
class Detect(nn.Module):
|
| 24 |
+
stride = None # strides computed during build
|
| 25 |
+
export = False # onnx export
|
| 26 |
+
|
| 27 |
+
def __init__(self, nc=80, anchors=(), ch=()): # detection layer
|
| 28 |
+
super(Detect, self).__init__()
|
| 29 |
+
self.nc = nc # number of classes
|
| 30 |
+
self.no = nc + 5 # number of outputs per anchor
|
| 31 |
+
self.nl = len(anchors) # number of detection layers
|
| 32 |
+
self.na = len(anchors[0]) // 2 # number of anchors
|
| 33 |
+
self.grid = [torch.zeros(1)] * self.nl # init grid
|
| 34 |
+
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
|
| 35 |
+
self.register_buffer('anchors', a) # shape(nl,na,2)
|
| 36 |
+
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
|
| 37 |
+
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
|
| 38 |
+
|
| 39 |
+
def forward(self, x):
|
| 40 |
+
# x = x.copy() # for profiling
|
| 41 |
+
z = [] # inference output
|
| 42 |
+
self.training |= self.export
|
| 43 |
+
for i in range(self.nl):
|
| 44 |
+
x[i] = self.m[i](x[i]) # conv
|
| 45 |
+
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
|
| 46 |
+
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
|
| 47 |
+
|
| 48 |
+
if not self.training: # inference
|
| 49 |
+
if self.grid[i].shape[2:4] != x[i].shape[2:4]:
|
| 50 |
+
self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
|
| 51 |
+
|
| 52 |
+
y = x[i].sigmoid()
|
| 53 |
+
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
|
| 54 |
+
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
|
| 55 |
+
z.append(y.view(bs, -1, self.no))
|
| 56 |
+
|
| 57 |
+
return x if self.training else (torch.cat(z, 1), x)
|
| 58 |
+
|
| 59 |
+
@staticmethod
|
| 60 |
+
def _make_grid(nx=20, ny=20):
|
| 61 |
+
yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
|
| 62 |
+
return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
|
| 63 |
+
|
| 64 |
+
|
| 65 |
+
class IDetect(nn.Module):
|
| 66 |
+
stride = None # strides computed during build
|
| 67 |
+
export = False # onnx export
|
| 68 |
+
|
| 69 |
+
def __init__(self, nc=80, anchors=(), ch=()): # detection layer
|
| 70 |
+
super(IDetect, self).__init__()
|
| 71 |
+
self.nc = nc # number of classes
|
| 72 |
+
self.no = nc + 5 # number of outputs per anchor
|
| 73 |
+
self.nl = len(anchors) # number of detection layers
|
| 74 |
+
self.na = len(anchors[0]) // 2 # number of anchors
|
| 75 |
+
self.grid = [torch.zeros(1)] * self.nl # init grid
|
| 76 |
+
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
|
| 77 |
+
self.register_buffer('anchors', a) # shape(nl,na,2)
|
| 78 |
+
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
|
| 79 |
+
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
|
| 80 |
+
|
| 81 |
+
self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
|
| 82 |
+
self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
|
| 83 |
+
|
| 84 |
+
def forward(self, x):
|
| 85 |
+
# x = x.copy() # for profiling
|
| 86 |
+
z = [] # inference output
|
| 87 |
+
self.training |= self.export
|
| 88 |
+
for i in range(self.nl):
|
| 89 |
+
x[i] = self.m[i](self.ia[i](x[i])) # conv
|
| 90 |
+
x[i] = self.im[i](x[i])
|
| 91 |
+
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
|
| 92 |
+
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
|
| 93 |
+
|
| 94 |
+
if not self.training: # inference
|
| 95 |
+
if self.grid[i].shape[2:4] != x[i].shape[2:4]:
|
| 96 |
+
self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
|
| 97 |
+
|
| 98 |
+
y = x[i].sigmoid()
|
| 99 |
+
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
|
| 100 |
+
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
|
| 101 |
+
z.append(y.view(bs, -1, self.no))
|
| 102 |
+
|
| 103 |
+
return x if self.training else (torch.cat(z, 1), x)
|
| 104 |
+
|
| 105 |
+
@staticmethod
|
| 106 |
+
def _make_grid(nx=20, ny=20):
|
| 107 |
+
yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
|
| 108 |
+
return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
|
| 109 |
+
|
| 110 |
+
|
| 111 |
+
class IAuxDetect(nn.Module):
|
| 112 |
+
stride = None # strides computed during build
|
| 113 |
+
export = False # onnx export
|
| 114 |
+
|
| 115 |
+
def __init__(self, nc=80, anchors=(), ch=()): # detection layer
|
| 116 |
+
super(IAuxDetect, self).__init__()
|
| 117 |
+
self.nc = nc # number of classes
|
| 118 |
+
self.no = nc + 5 # number of outputs per anchor
|
| 119 |
+
self.nl = len(anchors) # number of detection layers
|
| 120 |
+
self.na = len(anchors[0]) // 2 # number of anchors
|
| 121 |
+
self.grid = [torch.zeros(1)] * self.nl # init grid
|
| 122 |
+
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
|
| 123 |
+
self.register_buffer('anchors', a) # shape(nl,na,2)
|
| 124 |
+
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
|
| 125 |
+
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[:self.nl]) # output conv
|
| 126 |
+
self.m2 = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch[self.nl:]) # output conv
|
| 127 |
+
|
| 128 |
+
self.ia = nn.ModuleList(ImplicitA(x) for x in ch[:self.nl])
|
| 129 |
+
self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch[:self.nl])
|
| 130 |
+
|
| 131 |
+
def forward(self, x):
|
| 132 |
+
# x = x.copy() # for profiling
|
| 133 |
+
z = [] # inference output
|
| 134 |
+
self.training |= self.export
|
| 135 |
+
for i in range(self.nl):
|
| 136 |
+
x[i] = self.m[i](self.ia[i](x[i])) # conv
|
| 137 |
+
x[i] = self.im[i](x[i])
|
| 138 |
+
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
|
| 139 |
+
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
|
| 140 |
+
|
| 141 |
+
x[i+self.nl] = self.m2[i](x[i+self.nl])
|
| 142 |
+
x[i+self.nl] = x[i+self.nl].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
|
| 143 |
+
|
| 144 |
+
if not self.training: # inference
|
| 145 |
+
if self.grid[i].shape[2:4] != x[i].shape[2:4]:
|
| 146 |
+
self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
|
| 147 |
+
|
| 148 |
+
y = x[i].sigmoid()
|
| 149 |
+
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
|
| 150 |
+
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
|
| 151 |
+
z.append(y.view(bs, -1, self.no))
|
| 152 |
+
|
| 153 |
+
return x if self.training else (torch.cat(z, 1), x[:self.nl])
|
| 154 |
+
|
| 155 |
+
@staticmethod
|
| 156 |
+
def _make_grid(nx=20, ny=20):
|
| 157 |
+
yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
|
| 158 |
+
return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
|
| 159 |
+
|
| 160 |
+
|
| 161 |
+
class IBin(nn.Module):
|
| 162 |
+
stride = None # strides computed during build
|
| 163 |
+
export = False # onnx export
|
| 164 |
+
|
| 165 |
+
def __init__(self, nc=80, anchors=(), ch=(), bin_count=21): # detection layer
|
| 166 |
+
super(IBin, self).__init__()
|
| 167 |
+
self.nc = nc # number of classes
|
| 168 |
+
self.bin_count = bin_count
|
| 169 |
+
|
| 170 |
+
self.w_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
|
| 171 |
+
self.h_bin_sigmoid = SigmoidBin(bin_count=self.bin_count, min=0.0, max=4.0)
|
| 172 |
+
# classes, x,y,obj
|
| 173 |
+
self.no = nc + 3 + \
|
| 174 |
+
self.w_bin_sigmoid.get_length() + self.h_bin_sigmoid.get_length() # w-bce, h-bce
|
| 175 |
+
# + self.x_bin_sigmoid.get_length() + self.y_bin_sigmoid.get_length()
|
| 176 |
+
|
| 177 |
+
self.nl = len(anchors) # number of detection layers
|
| 178 |
+
self.na = len(anchors[0]) // 2 # number of anchors
|
| 179 |
+
self.grid = [torch.zeros(1)] * self.nl # init grid
|
| 180 |
+
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
|
| 181 |
+
self.register_buffer('anchors', a) # shape(nl,na,2)
|
| 182 |
+
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
|
| 183 |
+
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
|
| 184 |
+
|
| 185 |
+
self.ia = nn.ModuleList(ImplicitA(x) for x in ch)
|
| 186 |
+
self.im = nn.ModuleList(ImplicitM(self.no * self.na) for _ in ch)
|
| 187 |
+
|
| 188 |
+
def forward(self, x):
|
| 189 |
+
|
| 190 |
+
#self.x_bin_sigmoid.use_fw_regression = True
|
| 191 |
+
#self.y_bin_sigmoid.use_fw_regression = True
|
| 192 |
+
self.w_bin_sigmoid.use_fw_regression = True
|
| 193 |
+
self.h_bin_sigmoid.use_fw_regression = True
|
| 194 |
+
|
| 195 |
+
# x = x.copy() # for profiling
|
| 196 |
+
z = [] # inference output
|
| 197 |
+
self.training |= self.export
|
| 198 |
+
for i in range(self.nl):
|
| 199 |
+
x[i] = self.m[i](self.ia[i](x[i])) # conv
|
| 200 |
+
x[i] = self.im[i](x[i])
|
| 201 |
+
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
|
| 202 |
+
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
|
| 203 |
+
|
| 204 |
+
if not self.training: # inference
|
| 205 |
+
if self.grid[i].shape[2:4] != x[i].shape[2:4]:
|
| 206 |
+
self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
|
| 207 |
+
|
| 208 |
+
y = x[i].sigmoid()
|
| 209 |
+
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
|
| 210 |
+
#y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
|
| 211 |
+
|
| 212 |
+
|
| 213 |
+
#px = (self.x_bin_sigmoid.forward(y[..., 0:12]) + self.grid[i][..., 0]) * self.stride[i]
|
| 214 |
+
#py = (self.y_bin_sigmoid.forward(y[..., 12:24]) + self.grid[i][..., 1]) * self.stride[i]
|
| 215 |
+
|
| 216 |
+
pw = self.w_bin_sigmoid.forward(y[..., 2:24]) * self.anchor_grid[i][..., 0]
|
| 217 |
+
ph = self.h_bin_sigmoid.forward(y[..., 24:46]) * self.anchor_grid[i][..., 1]
|
| 218 |
+
|
| 219 |
+
#y[..., 0] = px
|
| 220 |
+
#y[..., 1] = py
|
| 221 |
+
y[..., 2] = pw
|
| 222 |
+
y[..., 3] = ph
|
| 223 |
+
|
| 224 |
+
y = torch.cat((y[..., 0:4], y[..., 46:]), dim=-1)
|
| 225 |
+
|
| 226 |
+
z.append(y.view(bs, -1, y.shape[-1]))
|
| 227 |
+
|
| 228 |
+
return x if self.training else (torch.cat(z, 1), x)
|
| 229 |
+
|
| 230 |
+
@staticmethod
|
| 231 |
+
def _make_grid(nx=20, ny=20):
|
| 232 |
+
yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
|
| 233 |
+
return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
|
| 234 |
+
|
| 235 |
+
|
| 236 |
+
class Model(nn.Module):
|
| 237 |
+
def __init__(self, cfg='yolor-csp-c.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
|
| 238 |
+
super(Model, self).__init__()
|
| 239 |
+
self.traced = False
|
| 240 |
+
if isinstance(cfg, dict):
|
| 241 |
+
self.yaml = cfg # model dict
|
| 242 |
+
else: # is *.yaml
|
| 243 |
+
import yaml # for torch hub
|
| 244 |
+
self.yaml_file = Path(cfg).name
|
| 245 |
+
with open(cfg) as f:
|
| 246 |
+
self.yaml = yaml.load(f, Loader=yaml.SafeLoader) # model dict
|
| 247 |
+
|
| 248 |
+
# Define model
|
| 249 |
+
ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
|
| 250 |
+
if nc and nc != self.yaml['nc']:
|
| 251 |
+
logger.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
|
| 252 |
+
self.yaml['nc'] = nc # override yaml value
|
| 253 |
+
if anchors:
|
| 254 |
+
logger.info(f'Overriding model.yaml anchors with anchors={anchors}')
|
| 255 |
+
self.yaml['anchors'] = round(anchors) # override yaml value
|
| 256 |
+
self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
|
| 257 |
+
self.names = [str(i) for i in range(self.yaml['nc'])] # default names
|
| 258 |
+
# print([x.shape for x in self.forward(torch.zeros(1, ch, 64, 64))])
|
| 259 |
+
|
| 260 |
+
# Build strides, anchors
|
| 261 |
+
m = self.model[-1] # Detect()
|
| 262 |
+
if isinstance(m, Detect):
|
| 263 |
+
s = 256 # 2x min stride
|
| 264 |
+
m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
|
| 265 |
+
m.anchors /= m.stride.view(-1, 1, 1)
|
| 266 |
+
check_anchor_order(m)
|
| 267 |
+
self.stride = m.stride
|
| 268 |
+
self._initialize_biases() # only run once
|
| 269 |
+
# print('Strides: %s' % m.stride.tolist())
|
| 270 |
+
if isinstance(m, IDetect):
|
| 271 |
+
s = 256 # 2x min stride
|
| 272 |
+
m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
|
| 273 |
+
m.anchors /= m.stride.view(-1, 1, 1)
|
| 274 |
+
check_anchor_order(m)
|
| 275 |
+
self.stride = m.stride
|
| 276 |
+
self._initialize_biases() # only run once
|
| 277 |
+
# print('Strides: %s' % m.stride.tolist())
|
| 278 |
+
if isinstance(m, IAuxDetect):
|
| 279 |
+
s = 256 # 2x min stride
|
| 280 |
+
m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))[:4]]) # forward
|
| 281 |
+
#print(m.stride)
|
| 282 |
+
m.anchors /= m.stride.view(-1, 1, 1)
|
| 283 |
+
check_anchor_order(m)
|
| 284 |
+
self.stride = m.stride
|
| 285 |
+
self._initialize_aux_biases() # only run once
|
| 286 |
+
# print('Strides: %s' % m.stride.tolist())
|
| 287 |
+
if isinstance(m, IBin):
|
| 288 |
+
s = 256 # 2x min stride
|
| 289 |
+
m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward
|
| 290 |
+
m.anchors /= m.stride.view(-1, 1, 1)
|
| 291 |
+
check_anchor_order(m)
|
| 292 |
+
self.stride = m.stride
|
| 293 |
+
self._initialize_biases_bin() # only run once
|
| 294 |
+
# print('Strides: %s' % m.stride.tolist())
|
| 295 |
+
|
| 296 |
+
# Init weights, biases
|
| 297 |
+
initialize_weights(self)
|
| 298 |
+
self.info()
|
| 299 |
+
logger.info('')
|
| 300 |
+
|
| 301 |
+
def forward(self, x, augment=False, profile=False):
|
| 302 |
+
if augment:
|
| 303 |
+
img_size = x.shape[-2:] # height, width
|
| 304 |
+
s = [1, 0.83, 0.67] # scales
|
| 305 |
+
f = [None, 3, None] # flips (2-ud, 3-lr)
|
| 306 |
+
y = [] # outputs
|
| 307 |
+
for si, fi in zip(s, f):
|
| 308 |
+
xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
|
| 309 |
+
yi = self.forward_once(xi)[0] # forward
|
| 310 |
+
# cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save
|
| 311 |
+
yi[..., :4] /= si # de-scale
|
| 312 |
+
if fi == 2:
|
| 313 |
+
yi[..., 1] = img_size[0] - yi[..., 1] # de-flip ud
|
| 314 |
+
elif fi == 3:
|
| 315 |
+
yi[..., 0] = img_size[1] - yi[..., 0] # de-flip lr
|
| 316 |
+
y.append(yi)
|
| 317 |
+
return torch.cat(y, 1), None # augmented inference, train
|
| 318 |
+
else:
|
| 319 |
+
return self.forward_once(x, profile) # single-scale inference, train
|
| 320 |
+
|
| 321 |
+
def forward_once(self, x, profile=False):
|
| 322 |
+
y, dt = [], [] # outputs
|
| 323 |
+
for m in self.model:
|
| 324 |
+
if m.f != -1: # if not from previous layer
|
| 325 |
+
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
|
| 326 |
+
|
| 327 |
+
if not hasattr(self, 'traced'):
|
| 328 |
+
self.traced=False
|
| 329 |
+
|
| 330 |
+
if self.traced:
|
| 331 |
+
if isinstance(m, Detect) or isinstance(m, IDetect) or isinstance(m, IAuxDetect):
|
| 332 |
+
break
|
| 333 |
+
|
| 334 |
+
if profile:
|
| 335 |
+
c = isinstance(m, (Detect, IDetect, IAuxDetect, IBin))
|
| 336 |
+
o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPS
|
| 337 |
+
for _ in range(10):
|
| 338 |
+
m(x.copy() if c else x)
|
| 339 |
+
t = time_synchronized()
|
| 340 |
+
for _ in range(10):
|
| 341 |
+
m(x.copy() if c else x)
|
| 342 |
+
dt.append((time_synchronized() - t) * 100)
|
| 343 |
+
print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))
|
| 344 |
+
|
| 345 |
+
x = m(x) # run
|
| 346 |
+
|
| 347 |
+
y.append(x if m.i in self.save else None) # save output
|
| 348 |
+
|
| 349 |
+
if profile:
|
| 350 |
+
print('%.1fms total' % sum(dt))
|
| 351 |
+
return x
|
| 352 |
+
|
| 353 |
+
def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
|
| 354 |
+
# https://arxiv.org/abs/1708.02002 section 3.3
|
| 355 |
+
# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
|
| 356 |
+
m = self.model[-1] # Detect() module
|
| 357 |
+
for mi, s in zip(m.m, m.stride): # from
|
| 358 |
+
b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
|
| 359 |
+
b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
|
| 360 |
+
b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
|
| 361 |
+
mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
|
| 362 |
+
|
| 363 |
+
def _initialize_aux_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency
|
| 364 |
+
# https://arxiv.org/abs/1708.02002 section 3.3
|
| 365 |
+
# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
|
| 366 |
+
m = self.model[-1] # Detect() module
|
| 367 |
+
for mi, mi2, s in zip(m.m, m.m2, m.stride): # from
|
| 368 |
+
b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
|
| 369 |
+
b.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
|
| 370 |
+
b.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
|
| 371 |
+
mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
|
| 372 |
+
b2 = mi2.bias.view(m.na, -1) # conv.bias(255) to (3,85)
|
| 373 |
+
b2.data[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
|
| 374 |
+
b2.data[:, 5:] += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
|
| 375 |
+
mi2.bias = torch.nn.Parameter(b2.view(-1), requires_grad=True)
|
| 376 |
+
|
| 377 |
+
def _initialize_biases_bin(self, cf=None): # initialize biases into Detect(), cf is class frequency
|
| 378 |
+
# https://arxiv.org/abs/1708.02002 section 3.3
|
| 379 |
+
# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.
|
| 380 |
+
m = self.model[-1] # Bin() module
|
| 381 |
+
bc = m.bin_count
|
| 382 |
+
for mi, s in zip(m.m, m.stride): # from
|
| 383 |
+
b = mi.bias.view(m.na, -1) # conv.bias(255) to (3,85)
|
| 384 |
+
old = b[:, (0,1,2,bc+3)].data
|
| 385 |
+
obj_idx = 2*bc+4
|
| 386 |
+
b[:, :obj_idx].data += math.log(0.6 / (bc + 1 - 0.99))
|
| 387 |
+
b[:, obj_idx].data += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)
|
| 388 |
+
b[:, (obj_idx+1):].data += math.log(0.6 / (m.nc - 0.99)) if cf is None else torch.log(cf / cf.sum()) # cls
|
| 389 |
+
b[:, (0,1,2,bc+3)].data = old
|
| 390 |
+
mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)
|
| 391 |
+
|
| 392 |
+
def _print_biases(self):
|
| 393 |
+
m = self.model[-1] # Detect() module
|
| 394 |
+
for mi in m.m: # from
|
| 395 |
+
b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)
|
| 396 |
+
print(('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean()))
|
| 397 |
+
|
| 398 |
+
# def _print_weights(self):
|
| 399 |
+
# for m in self.model.modules():
|
| 400 |
+
# if type(m) is Bottleneck:
|
| 401 |
+
# print('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights
|
| 402 |
+
|
| 403 |
+
def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers
|
| 404 |
+
print('Fusing layers... ')
|
| 405 |
+
for m in self.model.modules():
|
| 406 |
+
if isinstance(m, RepConv):
|
| 407 |
+
#print(f" fuse_repvgg_block")
|
| 408 |
+
m.fuse_repvgg_block()
|
| 409 |
+
elif isinstance(m, RepConv_OREPA):
|
| 410 |
+
#print(f" switch_to_deploy")
|
| 411 |
+
m.switch_to_deploy()
|
| 412 |
+
elif type(m) is Conv and hasattr(m, 'bn'):
|
| 413 |
+
m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
|
| 414 |
+
delattr(m, 'bn') # remove batchnorm
|
| 415 |
+
m.forward = m.fuseforward # update forward
|
| 416 |
+
self.info()
|
| 417 |
+
return self
|
| 418 |
+
|
| 419 |
+
def nms(self, mode=True): # add or remove NMS module
|
| 420 |
+
present = type(self.model[-1]) is NMS # last layer is NMS
|
| 421 |
+
if mode and not present:
|
| 422 |
+
print('Adding NMS... ')
|
| 423 |
+
m = NMS() # module
|
| 424 |
+
m.f = -1 # from
|
| 425 |
+
m.i = self.model[-1].i + 1 # index
|
| 426 |
+
self.model.add_module(name='%s' % m.i, module=m) # add
|
| 427 |
+
self.eval()
|
| 428 |
+
elif not mode and present:
|
| 429 |
+
print('Removing NMS... ')
|
| 430 |
+
self.model = self.model[:-1] # remove
|
| 431 |
+
return self
|
| 432 |
+
|
| 433 |
+
def autoshape(self): # add autoShape module
|
| 434 |
+
print('Adding autoShape... ')
|
| 435 |
+
m = autoShape(self) # wrap model
|
| 436 |
+
copy_attr(m, self, include=('yaml', 'nc', 'hyp', 'names', 'stride'), exclude=()) # copy attributes
|
| 437 |
+
return m
|
| 438 |
+
|
| 439 |
+
def info(self, verbose=False, img_size=640): # print model information
|
| 440 |
+
model_info(self, verbose, img_size)
|
| 441 |
+
|
| 442 |
+
|
| 443 |
+
def parse_model(d, ch): # model_dict, input_channels(3)
|
| 444 |
+
logger.info('\n%3s%18s%3s%10s %-40s%-30s' % ('', 'from', 'n', 'params', 'module', 'arguments'))
|
| 445 |
+
anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']
|
| 446 |
+
na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors
|
| 447 |
+
no = na * (nc + 5) # number of outputs = anchors * (classes + 5)
|
| 448 |
+
|
| 449 |
+
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
|
| 450 |
+
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
|
| 451 |
+
m = eval(m) if isinstance(m, str) else m # eval strings
|
| 452 |
+
for j, a in enumerate(args):
|
| 453 |
+
try:
|
| 454 |
+
args[j] = eval(a) if isinstance(a, str) else a # eval strings
|
| 455 |
+
except:
|
| 456 |
+
pass
|
| 457 |
+
|
| 458 |
+
n = max(round(n * gd), 1) if n > 1 else n # depth gain
|
| 459 |
+
if m in [nn.Conv2d, Conv, RobustConv, RobustConv2, DWConv, GhostConv, RepConv, RepConv_OREPA, DownC,
|
| 460 |
+
SPP, SPPF, SPPCSPC, GhostSPPCSPC, MixConv2d, Focus, Stem, GhostStem, CrossConv,
|
| 461 |
+
Bottleneck, BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
|
| 462 |
+
RepBottleneck, RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
|
| 463 |
+
Res, ResCSPA, ResCSPB, ResCSPC,
|
| 464 |
+
RepRes, RepResCSPA, RepResCSPB, RepResCSPC,
|
| 465 |
+
ResX, ResXCSPA, ResXCSPB, ResXCSPC,
|
| 466 |
+
RepResX, RepResXCSPA, RepResXCSPB, RepResXCSPC,
|
| 467 |
+
Ghost, GhostCSPA, GhostCSPB, GhostCSPC,
|
| 468 |
+
SwinTransformerBlock, STCSPA, STCSPB, STCSPC,
|
| 469 |
+
SwinTransformer2Block, ST2CSPA, ST2CSPB, ST2CSPC]:
|
| 470 |
+
c1, c2 = ch[f], args[0]
|
| 471 |
+
if c2 != no: # if not output
|
| 472 |
+
c2 = make_divisible(c2 * gw, 8)
|
| 473 |
+
|
| 474 |
+
args = [c1, c2, *args[1:]]
|
| 475 |
+
if m in [DownC, SPPCSPC, GhostSPPCSPC,
|
| 476 |
+
BottleneckCSPA, BottleneckCSPB, BottleneckCSPC,
|
| 477 |
+
RepBottleneckCSPA, RepBottleneckCSPB, RepBottleneckCSPC,
|
| 478 |
+
ResCSPA, ResCSPB, ResCSPC,
|
| 479 |
+
RepResCSPA, RepResCSPB, RepResCSPC,
|
| 480 |
+
ResXCSPA, ResXCSPB, ResXCSPC,
|
| 481 |
+
RepResXCSPA, RepResXCSPB, RepResXCSPC,
|
| 482 |
+
GhostCSPA, GhostCSPB, GhostCSPC,
|
| 483 |
+
STCSPA, STCSPB, STCSPC,
|
| 484 |
+
ST2CSPA, ST2CSPB, ST2CSPC]:
|
| 485 |
+
args.insert(2, n) # number of repeats
|
| 486 |
+
n = 1
|
| 487 |
+
elif m is nn.BatchNorm2d:
|
| 488 |
+
args = [ch[f]]
|
| 489 |
+
elif m is Concat:
|
| 490 |
+
c2 = sum([ch[x] for x in f])
|
| 491 |
+
elif m is Chuncat:
|
| 492 |
+
c2 = sum([ch[x] for x in f])
|
| 493 |
+
elif m is Shortcut:
|
| 494 |
+
c2 = ch[f[0]]
|
| 495 |
+
elif m is Foldcut:
|
| 496 |
+
c2 = ch[f] // 2
|
| 497 |
+
elif m in [Detect, IDetect, IAuxDetect, IBin]:
|
| 498 |
+
args.append([ch[x] for x in f])
|
| 499 |
+
if isinstance(args[1], int): # number of anchors
|
| 500 |
+
args[1] = [list(range(args[1] * 2))] * len(f)
|
| 501 |
+
elif m is ReOrg:
|
| 502 |
+
c2 = ch[f] * 4
|
| 503 |
+
elif m is Contract:
|
| 504 |
+
c2 = ch[f] * args[0] ** 2
|
| 505 |
+
elif m is Expand:
|
| 506 |
+
c2 = ch[f] // args[0] ** 2
|
| 507 |
+
else:
|
| 508 |
+
c2 = ch[f]
|
| 509 |
+
|
| 510 |
+
m_ = nn.Sequential(*[m(*args) for _ in range(n)]) if n > 1 else m(*args) # module
|
| 511 |
+
t = str(m)[8:-2].replace('__main__.', '') # module type
|
| 512 |
+
np = sum([x.numel() for x in m_.parameters()]) # number params
|
| 513 |
+
m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params
|
| 514 |
+
logger.info('%3s%18s%3s%10.0f %-40s%-30s' % (i, f, n, np, t, args)) # print
|
| 515 |
+
save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
|
| 516 |
+
layers.append(m_)
|
| 517 |
+
if i == 0:
|
| 518 |
+
ch = []
|
| 519 |
+
ch.append(c2)
|
| 520 |
+
return nn.Sequential(*layers), sorted(save)
|
| 521 |
+
|
| 522 |
+
|
| 523 |
+
if __name__ == '__main__':
|
| 524 |
+
parser = argparse.ArgumentParser()
|
| 525 |
+
parser.add_argument('--cfg', type=str, default='yolor-csp-c.yaml', help='model.yaml')
|
| 526 |
+
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
|
| 527 |
+
parser.add_argument('--profile', action='store_true', help='profile model speed')
|
| 528 |
+
opt = parser.parse_args()
|
| 529 |
+
opt.cfg = check_file(opt.cfg) # check file
|
| 530 |
+
set_logging()
|
| 531 |
+
device = select_device(opt.device)
|
| 532 |
+
|
| 533 |
+
# Create model
|
| 534 |
+
model = Model(opt.cfg).to(device)
|
| 535 |
+
model.train()
|
| 536 |
+
|
| 537 |
+
if opt.profile:
|
| 538 |
+
img = torch.rand(1, 3, 640, 640).to(device)
|
| 539 |
+
y = model(img, profile=True)
|
| 540 |
+
|
| 541 |
+
# Profile
|
| 542 |
+
# img = torch.rand(8 if torch.cuda.is_available() else 1, 3, 640, 640).to(device)
|
| 543 |
+
# y = model(img, profile=True)
|
| 544 |
+
|
| 545 |
+
# Tensorboard
|
| 546 |
+
# from torch.utils.tensorboard import SummaryWriter
|
| 547 |
+
# tb_writer = SummaryWriter()
|
| 548 |
+
# print("Run 'tensorboard --logdir=models/runs' to view tensorboard at http://localhost:6006/")
|
| 549 |
+
# tb_writer.add_graph(model.model, img) # add model to tensorboard
|
| 550 |
+
# tb_writer.add_image('test', img[0], dataformats='CWH') # add model to tensorboard
|
scripts/get_coco.sh
ADDED
|
@@ -0,0 +1,22 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/bin/bash
|
| 2 |
+
# COCO 2017 dataset http://cocodataset.org
|
| 3 |
+
# Download command: bash ./scripts/get_coco.sh
|
| 4 |
+
|
| 5 |
+
# Download/unzip labels
|
| 6 |
+
d='./' # unzip directory
|
| 7 |
+
url=https://github.com/ultralytics/yolov5/releases/download/v1.0/
|
| 8 |
+
f='coco2017labels-segments.zip' # or 'coco2017labels.zip', 68 MB
|
| 9 |
+
echo 'Downloading' $url$f ' ...'
|
| 10 |
+
curl -L $url$f -o $f && unzip -q $f -d $d && rm $f & # download, unzip, remove in background
|
| 11 |
+
|
| 12 |
+
# Download/unzip images
|
| 13 |
+
d='./coco/images' # unzip directory
|
| 14 |
+
url=http://images.cocodataset.org/zips/
|
| 15 |
+
f1='train2017.zip' # 19G, 118k images
|
| 16 |
+
f2='val2017.zip' # 1G, 5k images
|
| 17 |
+
f3='test2017.zip' # 7G, 41k images (optional)
|
| 18 |
+
for f in $f1 $f2 $f3; do
|
| 19 |
+
echo 'Downloading' $url$f '...'
|
| 20 |
+
curl -L $url$f -o $f && unzip -q $f -d $d && rm $f & # download, unzip, remove in background
|
| 21 |
+
done
|
| 22 |
+
wait # finish background tasks
|
test.py
ADDED
|
@@ -0,0 +1,347 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import argparse
|
| 2 |
+
import json
|
| 3 |
+
import os
|
| 4 |
+
from pathlib import Path
|
| 5 |
+
from threading import Thread
|
| 6 |
+
|
| 7 |
+
import numpy as np
|
| 8 |
+
import torch
|
| 9 |
+
import yaml
|
| 10 |
+
from tqdm import tqdm
|
| 11 |
+
|
| 12 |
+
from models.experimental import attempt_load
|
| 13 |
+
from utils.datasets import create_dataloader
|
| 14 |
+
from utils.general import coco80_to_coco91_class, check_dataset, check_file, check_img_size, check_requirements, \
|
| 15 |
+
box_iou, non_max_suppression, scale_coords, xyxy2xywh, xywh2xyxy, set_logging, increment_path, colorstr
|
| 16 |
+
from utils.metrics import ap_per_class, ConfusionMatrix
|
| 17 |
+
from utils.plots import plot_images, output_to_target, plot_study_txt
|
| 18 |
+
from utils.torch_utils import select_device, time_synchronized, TracedModel
|
| 19 |
+
|
| 20 |
+
|
| 21 |
+
def test(data,
|
| 22 |
+
weights=None,
|
| 23 |
+
batch_size=32,
|
| 24 |
+
imgsz=640,
|
| 25 |
+
conf_thres=0.001,
|
| 26 |
+
iou_thres=0.6, # for NMS
|
| 27 |
+
save_json=False,
|
| 28 |
+
single_cls=False,
|
| 29 |
+
augment=False,
|
| 30 |
+
verbose=False,
|
| 31 |
+
model=None,
|
| 32 |
+
dataloader=None,
|
| 33 |
+
save_dir=Path(''), # for saving images
|
| 34 |
+
save_txt=False, # for auto-labelling
|
| 35 |
+
save_hybrid=False, # for hybrid auto-labelling
|
| 36 |
+
save_conf=False, # save auto-label confidences
|
| 37 |
+
plots=True,
|
| 38 |
+
wandb_logger=None,
|
| 39 |
+
compute_loss=None,
|
| 40 |
+
half_precision=True,
|
| 41 |
+
trace=False,
|
| 42 |
+
is_coco=False):
|
| 43 |
+
# Initialize/load model and set device
|
| 44 |
+
training = model is not None
|
| 45 |
+
if training: # called by train.py
|
| 46 |
+
device = next(model.parameters()).device # get model device
|
| 47 |
+
|
| 48 |
+
else: # called directly
|
| 49 |
+
set_logging()
|
| 50 |
+
device = select_device(opt.device, batch_size=batch_size)
|
| 51 |
+
|
| 52 |
+
# Directories
|
| 53 |
+
save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
|
| 54 |
+
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
|
| 55 |
+
|
| 56 |
+
# Load model
|
| 57 |
+
model = attempt_load(weights, map_location=device) # load FP32 model
|
| 58 |
+
gs = max(int(model.stride.max()), 32) # grid size (max stride)
|
| 59 |
+
imgsz = check_img_size(imgsz, s=gs) # check img_size
|
| 60 |
+
|
| 61 |
+
if trace:
|
| 62 |
+
model = TracedModel(model, device, opt.img_size)
|
| 63 |
+
|
| 64 |
+
# Half
|
| 65 |
+
half = device.type != 'cpu' and half_precision # half precision only supported on CUDA
|
| 66 |
+
if half:
|
| 67 |
+
model.half()
|
| 68 |
+
|
| 69 |
+
# Configure
|
| 70 |
+
model.eval()
|
| 71 |
+
if isinstance(data, str):
|
| 72 |
+
is_coco = data.endswith('coco.yaml')
|
| 73 |
+
with open(data) as f:
|
| 74 |
+
data = yaml.load(f, Loader=yaml.SafeLoader)
|
| 75 |
+
check_dataset(data) # check
|
| 76 |
+
nc = 1 if single_cls else int(data['nc']) # number of classes
|
| 77 |
+
iouv = torch.linspace(0.5, 0.95, 10).to(device) # iou vector for mAP@0.5:0.95
|
| 78 |
+
niou = iouv.numel()
|
| 79 |
+
|
| 80 |
+
# Logging
|
| 81 |
+
log_imgs = 0
|
| 82 |
+
if wandb_logger and wandb_logger.wandb:
|
| 83 |
+
log_imgs = min(wandb_logger.log_imgs, 100)
|
| 84 |
+
# Dataloader
|
| 85 |
+
if not training:
|
| 86 |
+
if device.type != 'cpu':
|
| 87 |
+
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
|
| 88 |
+
task = opt.task if opt.task in ('train', 'val', 'test') else 'val' # path to train/val/test images
|
| 89 |
+
dataloader = create_dataloader(data[task], imgsz, batch_size, gs, opt, pad=0.5, rect=True,
|
| 90 |
+
prefix=colorstr(f'{task}: '))[0]
|
| 91 |
+
|
| 92 |
+
seen = 0
|
| 93 |
+
confusion_matrix = ConfusionMatrix(nc=nc)
|
| 94 |
+
names = {k: v for k, v in enumerate(model.names if hasattr(model, 'names') else model.module.names)}
|
| 95 |
+
coco91class = coco80_to_coco91_class()
|
| 96 |
+
s = ('%20s' + '%12s' * 6) % ('Class', 'Images', 'Labels', 'P', 'R', 'mAP@.5', 'mAP@.5:.95')
|
| 97 |
+
p, r, f1, mp, mr, map50, map, t0, t1 = 0., 0., 0., 0., 0., 0., 0., 0., 0.
|
| 98 |
+
loss = torch.zeros(3, device=device)
|
| 99 |
+
jdict, stats, ap, ap_class, wandb_images = [], [], [], [], []
|
| 100 |
+
for batch_i, (img, targets, paths, shapes) in enumerate(tqdm(dataloader, desc=s)):
|
| 101 |
+
img = img.to(device, non_blocking=True)
|
| 102 |
+
img = img.half() if half else img.float() # uint8 to fp16/32
|
| 103 |
+
img /= 255.0 # 0 - 255 to 0.0 - 1.0
|
| 104 |
+
targets = targets.to(device)
|
| 105 |
+
nb, _, height, width = img.shape # batch size, channels, height, width
|
| 106 |
+
|
| 107 |
+
with torch.no_grad():
|
| 108 |
+
# Run model
|
| 109 |
+
t = time_synchronized()
|
| 110 |
+
out, train_out = model(img, augment=augment) # inference and training outputs
|
| 111 |
+
t0 += time_synchronized() - t
|
| 112 |
+
|
| 113 |
+
# Compute loss
|
| 114 |
+
if compute_loss:
|
| 115 |
+
loss += compute_loss([x.float() for x in train_out], targets)[1][:3] # box, obj, cls
|
| 116 |
+
|
| 117 |
+
# Run NMS
|
| 118 |
+
targets[:, 2:] *= torch.Tensor([width, height, width, height]).to(device) # to pixels
|
| 119 |
+
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
|
| 120 |
+
t = time_synchronized()
|
| 121 |
+
out = non_max_suppression(out, conf_thres=conf_thres, iou_thres=iou_thres, labels=lb, multi_label=True)
|
| 122 |
+
t1 += time_synchronized() - t
|
| 123 |
+
|
| 124 |
+
# Statistics per image
|
| 125 |
+
for si, pred in enumerate(out):
|
| 126 |
+
labels = targets[targets[:, 0] == si, 1:]
|
| 127 |
+
nl = len(labels)
|
| 128 |
+
tcls = labels[:, 0].tolist() if nl else [] # target class
|
| 129 |
+
path = Path(paths[si])
|
| 130 |
+
seen += 1
|
| 131 |
+
|
| 132 |
+
if len(pred) == 0:
|
| 133 |
+
if nl:
|
| 134 |
+
stats.append((torch.zeros(0, niou, dtype=torch.bool), torch.Tensor(), torch.Tensor(), tcls))
|
| 135 |
+
continue
|
| 136 |
+
|
| 137 |
+
# Predictions
|
| 138 |
+
predn = pred.clone()
|
| 139 |
+
scale_coords(img[si].shape[1:], predn[:, :4], shapes[si][0], shapes[si][1]) # native-space pred
|
| 140 |
+
|
| 141 |
+
# Append to text file
|
| 142 |
+
if save_txt:
|
| 143 |
+
gn = torch.tensor(shapes[si][0])[[1, 0, 1, 0]] # normalization gain whwh
|
| 144 |
+
for *xyxy, conf, cls in predn.tolist():
|
| 145 |
+
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
|
| 146 |
+
line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
|
| 147 |
+
with open(save_dir / 'labels' / (path.stem + '.txt'), 'a') as f:
|
| 148 |
+
f.write(('%g ' * len(line)).rstrip() % line + '\n')
|
| 149 |
+
|
| 150 |
+
# W&B logging - Media Panel Plots
|
| 151 |
+
if len(wandb_images) < log_imgs and wandb_logger.current_epoch > 0: # Check for test operation
|
| 152 |
+
if wandb_logger.current_epoch % wandb_logger.bbox_interval == 0:
|
| 153 |
+
box_data = [{"position": {"minX": xyxy[0], "minY": xyxy[1], "maxX": xyxy[2], "maxY": xyxy[3]},
|
| 154 |
+
"class_id": int(cls),
|
| 155 |
+
"box_caption": "%s %.3f" % (names[cls], conf),
|
| 156 |
+
"scores": {"class_score": conf},
|
| 157 |
+
"domain": "pixel"} for *xyxy, conf, cls in pred.tolist()]
|
| 158 |
+
boxes = {"predictions": {"box_data": box_data, "class_labels": names}} # inference-space
|
| 159 |
+
wandb_images.append(wandb_logger.wandb.Image(img[si], boxes=boxes, caption=path.name))
|
| 160 |
+
wandb_logger.log_training_progress(predn, path, names) if wandb_logger and wandb_logger.wandb_run else None
|
| 161 |
+
|
| 162 |
+
# Append to pycocotools JSON dictionary
|
| 163 |
+
if save_json:
|
| 164 |
+
# [{"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}, ...
|
| 165 |
+
image_id = int(path.stem) if path.stem.isnumeric() else path.stem
|
| 166 |
+
box = xyxy2xywh(predn[:, :4]) # xywh
|
| 167 |
+
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
|
| 168 |
+
for p, b in zip(pred.tolist(), box.tolist()):
|
| 169 |
+
jdict.append({'image_id': image_id,
|
| 170 |
+
'category_id': coco91class[int(p[5])] if is_coco else int(p[5]),
|
| 171 |
+
'bbox': [round(x, 3) for x in b],
|
| 172 |
+
'score': round(p[4], 5)})
|
| 173 |
+
|
| 174 |
+
# Assign all predictions as incorrect
|
| 175 |
+
correct = torch.zeros(pred.shape[0], niou, dtype=torch.bool, device=device)
|
| 176 |
+
if nl:
|
| 177 |
+
detected = [] # target indices
|
| 178 |
+
tcls_tensor = labels[:, 0]
|
| 179 |
+
|
| 180 |
+
# target boxes
|
| 181 |
+
tbox = xywh2xyxy(labels[:, 1:5])
|
| 182 |
+
scale_coords(img[si].shape[1:], tbox, shapes[si][0], shapes[si][1]) # native-space labels
|
| 183 |
+
if plots:
|
| 184 |
+
confusion_matrix.process_batch(predn, torch.cat((labels[:, 0:1], tbox), 1))
|
| 185 |
+
|
| 186 |
+
# Per target class
|
| 187 |
+
for cls in torch.unique(tcls_tensor):
|
| 188 |
+
ti = (cls == tcls_tensor).nonzero(as_tuple=False).view(-1) # prediction indices
|
| 189 |
+
pi = (cls == pred[:, 5]).nonzero(as_tuple=False).view(-1) # target indices
|
| 190 |
+
|
| 191 |
+
# Search for detections
|
| 192 |
+
if pi.shape[0]:
|
| 193 |
+
# Prediction to target ious
|
| 194 |
+
ious, i = box_iou(predn[pi, :4], tbox[ti]).max(1) # best ious, indices
|
| 195 |
+
|
| 196 |
+
# Append detections
|
| 197 |
+
detected_set = set()
|
| 198 |
+
for j in (ious > iouv[0]).nonzero(as_tuple=False):
|
| 199 |
+
d = ti[i[j]] # detected target
|
| 200 |
+
if d.item() not in detected_set:
|
| 201 |
+
detected_set.add(d.item())
|
| 202 |
+
detected.append(d)
|
| 203 |
+
correct[pi[j]] = ious[j] > iouv # iou_thres is 1xn
|
| 204 |
+
if len(detected) == nl: # all targets already located in image
|
| 205 |
+
break
|
| 206 |
+
|
| 207 |
+
# Append statistics (correct, conf, pcls, tcls)
|
| 208 |
+
stats.append((correct.cpu(), pred[:, 4].cpu(), pred[:, 5].cpu(), tcls))
|
| 209 |
+
|
| 210 |
+
# Plot images
|
| 211 |
+
if plots and batch_i < 3:
|
| 212 |
+
f = save_dir / f'test_batch{batch_i}_labels.jpg' # labels
|
| 213 |
+
Thread(target=plot_images, args=(img, targets, paths, f, names), daemon=True).start()
|
| 214 |
+
f = save_dir / f'test_batch{batch_i}_pred.jpg' # predictions
|
| 215 |
+
Thread(target=plot_images, args=(img, output_to_target(out), paths, f, names), daemon=True).start()
|
| 216 |
+
|
| 217 |
+
# Compute statistics
|
| 218 |
+
stats = [np.concatenate(x, 0) for x in zip(*stats)] # to numpy
|
| 219 |
+
if len(stats) and stats[0].any():
|
| 220 |
+
p, r, ap, f1, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
|
| 221 |
+
ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
|
| 222 |
+
mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
|
| 223 |
+
nt = np.bincount(stats[3].astype(np.int64), minlength=nc) # number of targets per class
|
| 224 |
+
else:
|
| 225 |
+
nt = torch.zeros(1)
|
| 226 |
+
|
| 227 |
+
# Print results
|
| 228 |
+
pf = '%20s' + '%12i' * 2 + '%12.3g' * 4 # print format
|
| 229 |
+
print(pf % ('all', seen, nt.sum(), mp, mr, map50, map))
|
| 230 |
+
|
| 231 |
+
# Print results per class
|
| 232 |
+
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
|
| 233 |
+
for i, c in enumerate(ap_class):
|
| 234 |
+
print(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
|
| 235 |
+
|
| 236 |
+
# Print speeds
|
| 237 |
+
t = tuple(x / seen * 1E3 for x in (t0, t1, t0 + t1)) + (imgsz, imgsz, batch_size) # tuple
|
| 238 |
+
if not training:
|
| 239 |
+
print('Speed: %.1f/%.1f/%.1f ms inference/NMS/total per %gx%g image at batch-size %g' % t)
|
| 240 |
+
|
| 241 |
+
# Plots
|
| 242 |
+
if plots:
|
| 243 |
+
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
|
| 244 |
+
if wandb_logger and wandb_logger.wandb:
|
| 245 |
+
val_batches = [wandb_logger.wandb.Image(str(f), caption=f.name) for f in sorted(save_dir.glob('test*.jpg'))]
|
| 246 |
+
wandb_logger.log({"Validation": val_batches})
|
| 247 |
+
if wandb_images:
|
| 248 |
+
wandb_logger.log({"Bounding Box Debugger/Images": wandb_images})
|
| 249 |
+
|
| 250 |
+
# Save JSON
|
| 251 |
+
if save_json and len(jdict):
|
| 252 |
+
w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else '' # weights
|
| 253 |
+
anno_json = '../coco/annotations/instances_val2017.json' # annotations json
|
| 254 |
+
pred_json = str(save_dir / f"{w}_predictions.json") # predictions json
|
| 255 |
+
print('\nEvaluating pycocotools mAP... saving %s...' % pred_json)
|
| 256 |
+
with open(pred_json, 'w') as f:
|
| 257 |
+
json.dump(jdict, f)
|
| 258 |
+
|
| 259 |
+
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
|
| 260 |
+
from pycocotools.coco import COCO
|
| 261 |
+
from pycocotools.cocoeval import COCOeval
|
| 262 |
+
|
| 263 |
+
anno = COCO(anno_json) # init annotations api
|
| 264 |
+
pred = anno.loadRes(pred_json) # init predictions api
|
| 265 |
+
eval = COCOeval(anno, pred, 'bbox')
|
| 266 |
+
if is_coco:
|
| 267 |
+
eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.img_files] # image IDs to evaluate
|
| 268 |
+
eval.evaluate()
|
| 269 |
+
eval.accumulate()
|
| 270 |
+
eval.summarize()
|
| 271 |
+
map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
|
| 272 |
+
except Exception as e:
|
| 273 |
+
print(f'pycocotools unable to run: {e}')
|
| 274 |
+
|
| 275 |
+
# Return results
|
| 276 |
+
model.float() # for training
|
| 277 |
+
if not training:
|
| 278 |
+
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
|
| 279 |
+
print(f"Results saved to {save_dir}{s}")
|
| 280 |
+
maps = np.zeros(nc) + map
|
| 281 |
+
for i, c in enumerate(ap_class):
|
| 282 |
+
maps[c] = ap[i]
|
| 283 |
+
return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
|
| 284 |
+
|
| 285 |
+
|
| 286 |
+
if __name__ == '__main__':
|
| 287 |
+
parser = argparse.ArgumentParser(prog='test.py')
|
| 288 |
+
parser.add_argument('--weights', nargs='+', type=str, default='yolov7.pt', help='model.pt path(s)')
|
| 289 |
+
parser.add_argument('--data', type=str, default='data/coco.yaml', help='*.data path')
|
| 290 |
+
parser.add_argument('--batch-size', type=int, default=32, help='size of each image batch')
|
| 291 |
+
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
|
| 292 |
+
parser.add_argument('--conf-thres', type=float, default=0.001, help='object confidence threshold')
|
| 293 |
+
parser.add_argument('--iou-thres', type=float, default=0.65, help='IOU threshold for NMS')
|
| 294 |
+
parser.add_argument('--task', default='val', help='train, val, test, speed or study')
|
| 295 |
+
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
|
| 296 |
+
parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
|
| 297 |
+
parser.add_argument('--augment', action='store_true', help='augmented inference')
|
| 298 |
+
parser.add_argument('--verbose', action='store_true', help='report mAP by class')
|
| 299 |
+
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
|
| 300 |
+
parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
|
| 301 |
+
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
|
| 302 |
+
parser.add_argument('--save-json', action='store_true', help='save a cocoapi-compatible JSON results file')
|
| 303 |
+
parser.add_argument('--project', default='runs/test', help='save to project/name')
|
| 304 |
+
parser.add_argument('--name', default='exp', help='save to project/name')
|
| 305 |
+
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
|
| 306 |
+
parser.add_argument('--trace', action='store_true', help='trace model')
|
| 307 |
+
opt = parser.parse_args()
|
| 308 |
+
opt.save_json |= opt.data.endswith('coco.yaml')
|
| 309 |
+
opt.data = check_file(opt.data) # check file
|
| 310 |
+
print(opt)
|
| 311 |
+
#check_requirements()
|
| 312 |
+
|
| 313 |
+
if opt.task in ('train', 'val', 'test'): # run normally
|
| 314 |
+
test(opt.data,
|
| 315 |
+
opt.weights,
|
| 316 |
+
opt.batch_size,
|
| 317 |
+
opt.img_size,
|
| 318 |
+
opt.conf_thres,
|
| 319 |
+
opt.iou_thres,
|
| 320 |
+
opt.save_json,
|
| 321 |
+
opt.single_cls,
|
| 322 |
+
opt.augment,
|
| 323 |
+
opt.verbose,
|
| 324 |
+
save_txt=opt.save_txt | opt.save_hybrid,
|
| 325 |
+
save_hybrid=opt.save_hybrid,
|
| 326 |
+
save_conf=opt.save_conf,
|
| 327 |
+
trace=opt.trace,
|
| 328 |
+
)
|
| 329 |
+
|
| 330 |
+
elif opt.task == 'speed': # speed benchmarks
|
| 331 |
+
for w in opt.weights:
|
| 332 |
+
test(opt.data, w, opt.batch_size, opt.img_size, 0.25, 0.45, save_json=False, plots=False)
|
| 333 |
+
|
| 334 |
+
elif opt.task == 'study': # run over a range of settings and save/plot
|
| 335 |
+
# python test.py --task study --data coco.yaml --iou 0.65 --weights yolov7.pt
|
| 336 |
+
x = list(range(256, 1536 + 128, 128)) # x axis (image sizes)
|
| 337 |
+
for w in opt.weights:
|
| 338 |
+
f = f'study_{Path(opt.data).stem}_{Path(w).stem}.txt' # filename to save to
|
| 339 |
+
y = [] # y axis
|
| 340 |
+
for i in x: # img-size
|
| 341 |
+
print(f'\nRunning {f} point {i}...')
|
| 342 |
+
r, _, t = test(opt.data, w, opt.batch_size, i, opt.conf_thres, opt.iou_thres, opt.save_json,
|
| 343 |
+
plots=False)
|
| 344 |
+
y.append(r + t) # results and times
|
| 345 |
+
np.savetxt(f, y, fmt='%10.4g') # save
|
| 346 |
+
os.system('zip -r study.zip study_*.txt')
|
| 347 |
+
plot_study_txt(x=x) # plot
|
train.py
ADDED
|
@@ -0,0 +1,691 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import argparse
|
| 2 |
+
import logging
|
| 3 |
+
import math
|
| 4 |
+
import os
|
| 5 |
+
import random
|
| 6 |
+
import time
|
| 7 |
+
from copy import deepcopy
|
| 8 |
+
from pathlib import Path
|
| 9 |
+
from threading import Thread
|
| 10 |
+
|
| 11 |
+
import numpy as np
|
| 12 |
+
import torch.distributed as dist
|
| 13 |
+
import torch.nn as nn
|
| 14 |
+
import torch.nn.functional as F
|
| 15 |
+
import torch.optim as optim
|
| 16 |
+
import torch.optim.lr_scheduler as lr_scheduler
|
| 17 |
+
import torch.utils.data
|
| 18 |
+
import yaml
|
| 19 |
+
from torch.cuda import amp
|
| 20 |
+
from torch.nn.parallel import DistributedDataParallel as DDP
|
| 21 |
+
from torch.utils.tensorboard import SummaryWriter
|
| 22 |
+
from tqdm import tqdm
|
| 23 |
+
|
| 24 |
+
import test # import test.py to get mAP after each epoch
|
| 25 |
+
from models.experimental import attempt_load
|
| 26 |
+
from models.yolo import Model
|
| 27 |
+
from utils.autoanchor import check_anchors
|
| 28 |
+
from utils.datasets import create_dataloader
|
| 29 |
+
from utils.general import labels_to_class_weights, increment_path, labels_to_image_weights, init_seeds, \
|
| 30 |
+
fitness, strip_optimizer, get_latest_run, check_dataset, check_file, check_git_status, check_img_size, \
|
| 31 |
+
check_requirements, print_mutation, set_logging, one_cycle, colorstr
|
| 32 |
+
from utils.google_utils import attempt_download
|
| 33 |
+
from utils.loss import ComputeLoss, ComputeLossOTA
|
| 34 |
+
from utils.plots import plot_images, plot_labels, plot_results, plot_evolution
|
| 35 |
+
from utils.torch_utils import ModelEMA, select_device, intersect_dicts, torch_distributed_zero_first, is_parallel
|
| 36 |
+
from utils.wandb_logging.wandb_utils import WandbLogger, check_wandb_resume
|
| 37 |
+
|
| 38 |
+
logger = logging.getLogger(__name__)
|
| 39 |
+
|
| 40 |
+
|
| 41 |
+
def train(hyp, opt, device, tb_writer=None):
|
| 42 |
+
logger.info(colorstr('hyperparameters: ') + ', '.join(f'{k}={v}' for k, v in hyp.items()))
|
| 43 |
+
save_dir, epochs, batch_size, total_batch_size, weights, rank = \
|
| 44 |
+
Path(opt.save_dir), opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank
|
| 45 |
+
|
| 46 |
+
# Directories
|
| 47 |
+
wdir = save_dir / 'weights'
|
| 48 |
+
wdir.mkdir(parents=True, exist_ok=True) # make dir
|
| 49 |
+
last = wdir / 'last.pt'
|
| 50 |
+
best = wdir / 'best.pt'
|
| 51 |
+
results_file = save_dir / 'results.txt'
|
| 52 |
+
|
| 53 |
+
# Save run settings
|
| 54 |
+
with open(save_dir / 'hyp.yaml', 'w') as f:
|
| 55 |
+
yaml.dump(hyp, f, sort_keys=False)
|
| 56 |
+
with open(save_dir / 'opt.yaml', 'w') as f:
|
| 57 |
+
yaml.dump(vars(opt), f, sort_keys=False)
|
| 58 |
+
|
| 59 |
+
# Configure
|
| 60 |
+
plots = not opt.evolve # create plots
|
| 61 |
+
cuda = device.type != 'cpu'
|
| 62 |
+
init_seeds(2 + rank)
|
| 63 |
+
with open(opt.data) as f:
|
| 64 |
+
data_dict = yaml.load(f, Loader=yaml.SafeLoader) # data dict
|
| 65 |
+
is_coco = opt.data.endswith('coco.yaml')
|
| 66 |
+
|
| 67 |
+
# Logging- Doing this before checking the dataset. Might update data_dict
|
| 68 |
+
loggers = {'wandb': None} # loggers dict
|
| 69 |
+
if rank in [-1, 0]:
|
| 70 |
+
opt.hyp = hyp # add hyperparameters
|
| 71 |
+
run_id = torch.load(weights).get('wandb_id') if weights.endswith('.pt') and os.path.isfile(weights) else None
|
| 72 |
+
wandb_logger = WandbLogger(opt, Path(opt.save_dir).stem, run_id, data_dict)
|
| 73 |
+
loggers['wandb'] = wandb_logger.wandb
|
| 74 |
+
data_dict = wandb_logger.data_dict
|
| 75 |
+
if wandb_logger.wandb:
|
| 76 |
+
weights, epochs, hyp = opt.weights, opt.epochs, opt.hyp # WandbLogger might update weights, epochs if resuming
|
| 77 |
+
|
| 78 |
+
nc = 1 if opt.single_cls else int(data_dict['nc']) # number of classes
|
| 79 |
+
names = ['item'] if opt.single_cls and len(data_dict['names']) != 1 else data_dict['names'] # class names
|
| 80 |
+
assert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check
|
| 81 |
+
|
| 82 |
+
# Model
|
| 83 |
+
pretrained = weights.endswith('.pt')
|
| 84 |
+
if pretrained:
|
| 85 |
+
with torch_distributed_zero_first(rank):
|
| 86 |
+
attempt_download(weights) # download if not found locally
|
| 87 |
+
ckpt = torch.load(weights, map_location=device) # load checkpoint
|
| 88 |
+
model = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
|
| 89 |
+
exclude = ['anchor'] if (opt.cfg or hyp.get('anchors')) and not opt.resume else [] # exclude keys
|
| 90 |
+
state_dict = ckpt['model'].float().state_dict() # to FP32
|
| 91 |
+
state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersect
|
| 92 |
+
model.load_state_dict(state_dict, strict=False) # load
|
| 93 |
+
logger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # report
|
| 94 |
+
else:
|
| 95 |
+
model = Model(opt.cfg, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
|
| 96 |
+
with torch_distributed_zero_first(rank):
|
| 97 |
+
check_dataset(data_dict) # check
|
| 98 |
+
train_path = data_dict['train']
|
| 99 |
+
test_path = data_dict['val']
|
| 100 |
+
|
| 101 |
+
# Freeze
|
| 102 |
+
freeze = [] # parameter names to freeze (full or partial)
|
| 103 |
+
for k, v in model.named_parameters():
|
| 104 |
+
v.requires_grad = True # train all layers
|
| 105 |
+
if any(x in k for x in freeze):
|
| 106 |
+
print('freezing %s' % k)
|
| 107 |
+
v.requires_grad = False
|
| 108 |
+
|
| 109 |
+
# Optimizer
|
| 110 |
+
nbs = 64 # nominal batch size
|
| 111 |
+
accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
|
| 112 |
+
hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
|
| 113 |
+
logger.info(f"Scaled weight_decay = {hyp['weight_decay']}")
|
| 114 |
+
|
| 115 |
+
pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
|
| 116 |
+
for k, v in model.named_modules():
|
| 117 |
+
if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter):
|
| 118 |
+
pg2.append(v.bias) # biases
|
| 119 |
+
if isinstance(v, nn.BatchNorm2d):
|
| 120 |
+
pg0.append(v.weight) # no decay
|
| 121 |
+
elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter):
|
| 122 |
+
pg1.append(v.weight) # apply decay
|
| 123 |
+
if hasattr(v, 'im'):
|
| 124 |
+
if hasattr(v.im, 'implicit'):
|
| 125 |
+
pg0.append(v.im.implicit)
|
| 126 |
+
else:
|
| 127 |
+
for iv in v.im:
|
| 128 |
+
pg0.append(iv.implicit)
|
| 129 |
+
if hasattr(v, 'imc'):
|
| 130 |
+
if hasattr(v.imc, 'implicit'):
|
| 131 |
+
pg0.append(v.imc.implicit)
|
| 132 |
+
else:
|
| 133 |
+
for iv in v.imc:
|
| 134 |
+
pg0.append(iv.implicit)
|
| 135 |
+
if hasattr(v, 'imb'):
|
| 136 |
+
if hasattr(v.imb, 'implicit'):
|
| 137 |
+
pg0.append(v.imb.implicit)
|
| 138 |
+
else:
|
| 139 |
+
for iv in v.imb:
|
| 140 |
+
pg0.append(iv.implicit)
|
| 141 |
+
if hasattr(v, 'imo'):
|
| 142 |
+
if hasattr(v.imo, 'implicit'):
|
| 143 |
+
pg0.append(v.imo.implicit)
|
| 144 |
+
else:
|
| 145 |
+
for iv in v.imo:
|
| 146 |
+
pg0.append(iv.implicit)
|
| 147 |
+
if hasattr(v, 'ia'):
|
| 148 |
+
if hasattr(v.ia, 'implicit'):
|
| 149 |
+
pg0.append(v.ia.implicit)
|
| 150 |
+
else:
|
| 151 |
+
for iv in v.ia:
|
| 152 |
+
pg0.append(iv.implicit)
|
| 153 |
+
if hasattr(v, 'attn'):
|
| 154 |
+
if hasattr(v.attn, 'logit_scale'):
|
| 155 |
+
pg0.append(v.attn.logit_scale)
|
| 156 |
+
if hasattr(v.attn, 'q_bias'):
|
| 157 |
+
pg0.append(v.attn.q_bias)
|
| 158 |
+
if hasattr(v.attn, 'v_bias'):
|
| 159 |
+
pg0.append(v.attn.v_bias)
|
| 160 |
+
if hasattr(v.attn, 'relative_position_bias_table'):
|
| 161 |
+
pg0.append(v.attn.relative_position_bias_table)
|
| 162 |
+
if hasattr(v, 'rbr_dense'):
|
| 163 |
+
if hasattr(v.rbr_dense, 'weight_rbr_origin'):
|
| 164 |
+
pg0.append(v.rbr_dense.weight_rbr_origin)
|
| 165 |
+
if hasattr(v.rbr_dense, 'weight_rbr_avg_conv'):
|
| 166 |
+
pg0.append(v.rbr_dense.weight_rbr_avg_conv)
|
| 167 |
+
if hasattr(v.rbr_dense, 'weight_rbr_pfir_conv'):
|
| 168 |
+
pg0.append(v.rbr_dense.weight_rbr_pfir_conv)
|
| 169 |
+
if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_idconv1'):
|
| 170 |
+
pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_idconv1)
|
| 171 |
+
if hasattr(v.rbr_dense, 'weight_rbr_1x1_kxk_conv2'):
|
| 172 |
+
pg0.append(v.rbr_dense.weight_rbr_1x1_kxk_conv2)
|
| 173 |
+
if hasattr(v.rbr_dense, 'weight_rbr_gconv_dw'):
|
| 174 |
+
pg0.append(v.rbr_dense.weight_rbr_gconv_dw)
|
| 175 |
+
if hasattr(v.rbr_dense, 'weight_rbr_gconv_pw'):
|
| 176 |
+
pg0.append(v.rbr_dense.weight_rbr_gconv_pw)
|
| 177 |
+
if hasattr(v.rbr_dense, 'vector'):
|
| 178 |
+
pg0.append(v.rbr_dense.vector)
|
| 179 |
+
|
| 180 |
+
if opt.adam:
|
| 181 |
+
optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
|
| 182 |
+
else:
|
| 183 |
+
optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
|
| 184 |
+
|
| 185 |
+
optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decay
|
| 186 |
+
optimizer.add_param_group({'params': pg2}) # add pg2 (biases)
|
| 187 |
+
logger.info('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))
|
| 188 |
+
del pg0, pg1, pg2
|
| 189 |
+
|
| 190 |
+
# Scheduler https://arxiv.org/pdf/1812.01187.pdf
|
| 191 |
+
# https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLR
|
| 192 |
+
if opt.linear_lr:
|
| 193 |
+
lf = lambda x: (1 - x / (epochs - 1)) * (1.0 - hyp['lrf']) + hyp['lrf'] # linear
|
| 194 |
+
else:
|
| 195 |
+
lf = one_cycle(1, hyp['lrf'], epochs) # cosine 1->hyp['lrf']
|
| 196 |
+
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
|
| 197 |
+
# plot_lr_scheduler(optimizer, scheduler, epochs)
|
| 198 |
+
|
| 199 |
+
# EMA
|
| 200 |
+
ema = ModelEMA(model) if rank in [-1, 0] else None
|
| 201 |
+
|
| 202 |
+
# Resume
|
| 203 |
+
start_epoch, best_fitness = 0, 0.0
|
| 204 |
+
if pretrained:
|
| 205 |
+
# Optimizer
|
| 206 |
+
if ckpt['optimizer'] is not None:
|
| 207 |
+
optimizer.load_state_dict(ckpt['optimizer'])
|
| 208 |
+
best_fitness = ckpt['best_fitness']
|
| 209 |
+
|
| 210 |
+
# EMA
|
| 211 |
+
if ema and ckpt.get('ema'):
|
| 212 |
+
ema.ema.load_state_dict(ckpt['ema'].float().state_dict())
|
| 213 |
+
ema.updates = ckpt['updates']
|
| 214 |
+
|
| 215 |
+
# Results
|
| 216 |
+
if ckpt.get('training_results') is not None:
|
| 217 |
+
results_file.write_text(ckpt['training_results']) # write results.txt
|
| 218 |
+
|
| 219 |
+
# Epochs
|
| 220 |
+
start_epoch = ckpt['epoch'] + 1
|
| 221 |
+
if opt.resume:
|
| 222 |
+
assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)
|
| 223 |
+
if epochs < start_epoch:
|
| 224 |
+
logger.info('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %
|
| 225 |
+
(weights, ckpt['epoch'], epochs))
|
| 226 |
+
epochs += ckpt['epoch'] # finetune additional epochs
|
| 227 |
+
|
| 228 |
+
del ckpt, state_dict
|
| 229 |
+
|
| 230 |
+
# Image sizes
|
| 231 |
+
gs = max(int(model.stride.max()), 32) # grid size (max stride)
|
| 232 |
+
nl = model.model[-1].nl # number of detection layers (used for scaling hyp['obj'])
|
| 233 |
+
imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
|
| 234 |
+
|
| 235 |
+
# DP mode
|
| 236 |
+
if cuda and rank == -1 and torch.cuda.device_count() > 1:
|
| 237 |
+
model = torch.nn.DataParallel(model)
|
| 238 |
+
|
| 239 |
+
# SyncBatchNorm
|
| 240 |
+
if opt.sync_bn and cuda and rank != -1:
|
| 241 |
+
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
|
| 242 |
+
logger.info('Using SyncBatchNorm()')
|
| 243 |
+
|
| 244 |
+
# Trainloader
|
| 245 |
+
dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,
|
| 246 |
+
hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect, rank=rank,
|
| 247 |
+
world_size=opt.world_size, workers=opt.workers,
|
| 248 |
+
image_weights=opt.image_weights, quad=opt.quad, prefix=colorstr('train: '))
|
| 249 |
+
mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
|
| 250 |
+
nb = len(dataloader) # number of batches
|
| 251 |
+
assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
|
| 252 |
+
|
| 253 |
+
# Process 0
|
| 254 |
+
if rank in [-1, 0]:
|
| 255 |
+
testloader = create_dataloader(test_path, imgsz_test, batch_size * 2, gs, opt, # testloader
|
| 256 |
+
hyp=hyp, cache=opt.cache_images and not opt.notest, rect=True, rank=-1,
|
| 257 |
+
world_size=opt.world_size, workers=opt.workers,
|
| 258 |
+
pad=0.5, prefix=colorstr('val: '))[0]
|
| 259 |
+
|
| 260 |
+
if not opt.resume:
|
| 261 |
+
labels = np.concatenate(dataset.labels, 0)
|
| 262 |
+
c = torch.tensor(labels[:, 0]) # classes
|
| 263 |
+
# cf = torch.bincount(c.long(), minlength=nc) + 1. # frequency
|
| 264 |
+
# model._initialize_biases(cf.to(device))
|
| 265 |
+
if plots:
|
| 266 |
+
#plot_labels(labels, names, save_dir, loggers)
|
| 267 |
+
if tb_writer:
|
| 268 |
+
tb_writer.add_histogram('classes', c, 0)
|
| 269 |
+
|
| 270 |
+
# Anchors
|
| 271 |
+
if not opt.noautoanchor:
|
| 272 |
+
check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
|
| 273 |
+
model.half().float() # pre-reduce anchor precision
|
| 274 |
+
|
| 275 |
+
# DDP mode
|
| 276 |
+
if cuda and rank != -1:
|
| 277 |
+
model = DDP(model, device_ids=[opt.local_rank], output_device=opt.local_rank,
|
| 278 |
+
# nn.MultiheadAttention incompatibility with DDP https://github.com/pytorch/pytorch/issues/26698
|
| 279 |
+
find_unused_parameters=any(isinstance(layer, nn.MultiheadAttention) for layer in model.modules()))
|
| 280 |
+
|
| 281 |
+
# Model parameters
|
| 282 |
+
hyp['box'] *= 3. / nl # scale to layers
|
| 283 |
+
hyp['cls'] *= nc / 80. * 3. / nl # scale to classes and layers
|
| 284 |
+
hyp['obj'] *= (imgsz / 640) ** 2 * 3. / nl # scale to image size and layers
|
| 285 |
+
hyp['label_smoothing'] = opt.label_smoothing
|
| 286 |
+
model.nc = nc # attach number of classes to model
|
| 287 |
+
model.hyp = hyp # attach hyperparameters to model
|
| 288 |
+
model.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)
|
| 289 |
+
model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
|
| 290 |
+
model.names = names
|
| 291 |
+
|
| 292 |
+
# Start training
|
| 293 |
+
t0 = time.time()
|
| 294 |
+
nw = max(round(hyp['warmup_epochs'] * nb), 1000) # number of warmup iterations, max(3 epochs, 1k iterations)
|
| 295 |
+
# nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
|
| 296 |
+
maps = np.zeros(nc) # mAP per class
|
| 297 |
+
results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
|
| 298 |
+
scheduler.last_epoch = start_epoch - 1 # do not move
|
| 299 |
+
scaler = amp.GradScaler(enabled=cuda)
|
| 300 |
+
compute_loss_ota = ComputeLossOTA(model) # init loss class
|
| 301 |
+
compute_loss = ComputeLoss(model) # init loss class
|
| 302 |
+
logger.info(f'Image sizes {imgsz} train, {imgsz_test} test\n'
|
| 303 |
+
f'Using {dataloader.num_workers} dataloader workers\n'
|
| 304 |
+
f'Logging results to {save_dir}\n'
|
| 305 |
+
f'Starting training for {epochs} epochs...')
|
| 306 |
+
torch.save(model, wdir / 'init.pt')
|
| 307 |
+
for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
|
| 308 |
+
model.train()
|
| 309 |
+
|
| 310 |
+
# Update image weights (optional)
|
| 311 |
+
if opt.image_weights:
|
| 312 |
+
# Generate indices
|
| 313 |
+
if rank in [-1, 0]:
|
| 314 |
+
cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
|
| 315 |
+
iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
|
| 316 |
+
dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
|
| 317 |
+
# Broadcast if DDP
|
| 318 |
+
if rank != -1:
|
| 319 |
+
indices = (torch.tensor(dataset.indices) if rank == 0 else torch.zeros(dataset.n)).int()
|
| 320 |
+
dist.broadcast(indices, 0)
|
| 321 |
+
if rank != 0:
|
| 322 |
+
dataset.indices = indices.cpu().numpy()
|
| 323 |
+
|
| 324 |
+
# Update mosaic border
|
| 325 |
+
# b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
|
| 326 |
+
# dataset.mosaic_border = [b - imgsz, -b] # height, width borders
|
| 327 |
+
|
| 328 |
+
mloss = torch.zeros(4, device=device) # mean losses
|
| 329 |
+
if rank != -1:
|
| 330 |
+
dataloader.sampler.set_epoch(epoch)
|
| 331 |
+
pbar = enumerate(dataloader)
|
| 332 |
+
logger.info(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'total', 'labels', 'img_size'))
|
| 333 |
+
if rank in [-1, 0]:
|
| 334 |
+
pbar = tqdm(pbar, total=nb) # progress bar
|
| 335 |
+
optimizer.zero_grad()
|
| 336 |
+
for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
|
| 337 |
+
ni = i + nb * epoch # number integrated batches (since train start)
|
| 338 |
+
imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0
|
| 339 |
+
|
| 340 |
+
# Warmup
|
| 341 |
+
if ni <= nw:
|
| 342 |
+
xi = [0, nw] # x interp
|
| 343 |
+
# model.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
|
| 344 |
+
accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())
|
| 345 |
+
for j, x in enumerate(optimizer.param_groups):
|
| 346 |
+
# bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
|
| 347 |
+
x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])
|
| 348 |
+
if 'momentum' in x:
|
| 349 |
+
x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])
|
| 350 |
+
|
| 351 |
+
# Multi-scale
|
| 352 |
+
if opt.multi_scale:
|
| 353 |
+
sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
|
| 354 |
+
sf = sz / max(imgs.shape[2:]) # scale factor
|
| 355 |
+
if sf != 1:
|
| 356 |
+
ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
|
| 357 |
+
imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
|
| 358 |
+
|
| 359 |
+
# Forward
|
| 360 |
+
with amp.autocast(enabled=cuda):
|
| 361 |
+
pred = model(imgs) # forward
|
| 362 |
+
loss, loss_items = compute_loss_ota(pred, targets.to(device), imgs) # loss scaled by batch_size
|
| 363 |
+
if rank != -1:
|
| 364 |
+
loss *= opt.world_size # gradient averaged between devices in DDP mode
|
| 365 |
+
if opt.quad:
|
| 366 |
+
loss *= 4.
|
| 367 |
+
|
| 368 |
+
# Backward
|
| 369 |
+
scaler.scale(loss).backward()
|
| 370 |
+
|
| 371 |
+
# Optimize
|
| 372 |
+
if ni % accumulate == 0:
|
| 373 |
+
scaler.step(optimizer) # optimizer.step
|
| 374 |
+
scaler.update()
|
| 375 |
+
optimizer.zero_grad()
|
| 376 |
+
if ema:
|
| 377 |
+
ema.update(model)
|
| 378 |
+
|
| 379 |
+
# Print
|
| 380 |
+
if rank in [-1, 0]:
|
| 381 |
+
mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
|
| 382 |
+
mem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)
|
| 383 |
+
s = ('%10s' * 2 + '%10.4g' * 6) % (
|
| 384 |
+
'%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])
|
| 385 |
+
pbar.set_description(s)
|
| 386 |
+
|
| 387 |
+
# Plot
|
| 388 |
+
if plots and ni < 10:
|
| 389 |
+
f = save_dir / f'train_batch{ni}.jpg' # filename
|
| 390 |
+
Thread(target=plot_images, args=(imgs, targets, paths, f), daemon=True).start()
|
| 391 |
+
# if tb_writer:
|
| 392 |
+
# tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)
|
| 393 |
+
# tb_writer.add_graph(torch.jit.trace(model, imgs, strict=False), []) # add model graph
|
| 394 |
+
elif plots and ni == 10 and wandb_logger.wandb:
|
| 395 |
+
wandb_logger.log({"Mosaics": [wandb_logger.wandb.Image(str(x), caption=x.name) for x in
|
| 396 |
+
save_dir.glob('train*.jpg') if x.exists()]})
|
| 397 |
+
|
| 398 |
+
# end batch ------------------------------------------------------------------------------------------------
|
| 399 |
+
# end epoch ----------------------------------------------------------------------------------------------------
|
| 400 |
+
|
| 401 |
+
# Scheduler
|
| 402 |
+
lr = [x['lr'] for x in optimizer.param_groups] # for tensorboard
|
| 403 |
+
scheduler.step()
|
| 404 |
+
|
| 405 |
+
# DDP process 0 or single-GPU
|
| 406 |
+
if rank in [-1, 0]:
|
| 407 |
+
# mAP
|
| 408 |
+
ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'gr', 'names', 'stride', 'class_weights'])
|
| 409 |
+
final_epoch = epoch + 1 == epochs
|
| 410 |
+
if not opt.notest or final_epoch: # Calculate mAP
|
| 411 |
+
wandb_logger.current_epoch = epoch + 1
|
| 412 |
+
results, maps, times = test.test(data_dict,
|
| 413 |
+
batch_size=batch_size * 2,
|
| 414 |
+
imgsz=imgsz_test,
|
| 415 |
+
model=ema.ema,
|
| 416 |
+
single_cls=opt.single_cls,
|
| 417 |
+
dataloader=testloader,
|
| 418 |
+
save_dir=save_dir,
|
| 419 |
+
verbose=nc < 50 and final_epoch,
|
| 420 |
+
plots=plots and final_epoch,
|
| 421 |
+
wandb_logger=wandb_logger,
|
| 422 |
+
compute_loss=compute_loss,
|
| 423 |
+
is_coco=is_coco)
|
| 424 |
+
|
| 425 |
+
# Write
|
| 426 |
+
with open(results_file, 'a') as f:
|
| 427 |
+
f.write(s + '%10.4g' * 7 % results + '\n') # append metrics, val_loss
|
| 428 |
+
if len(opt.name) and opt.bucket:
|
| 429 |
+
os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))
|
| 430 |
+
|
| 431 |
+
# Log
|
| 432 |
+
tags = ['train/box_loss', 'train/obj_loss', 'train/cls_loss', # train loss
|
| 433 |
+
'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95',
|
| 434 |
+
'val/box_loss', 'val/obj_loss', 'val/cls_loss', # val loss
|
| 435 |
+
'x/lr0', 'x/lr1', 'x/lr2'] # params
|
| 436 |
+
for x, tag in zip(list(mloss[:-1]) + list(results) + lr, tags):
|
| 437 |
+
if tb_writer:
|
| 438 |
+
tb_writer.add_scalar(tag, x, epoch) # tensorboard
|
| 439 |
+
if wandb_logger.wandb:
|
| 440 |
+
wandb_logger.log({tag: x}) # W&B
|
| 441 |
+
|
| 442 |
+
# Update best mAP
|
| 443 |
+
fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
|
| 444 |
+
if fi > best_fitness:
|
| 445 |
+
best_fitness = fi
|
| 446 |
+
wandb_logger.end_epoch(best_result=best_fitness == fi)
|
| 447 |
+
|
| 448 |
+
# Save model
|
| 449 |
+
if (not opt.nosave) or (final_epoch and not opt.evolve): # if save
|
| 450 |
+
ckpt = {'epoch': epoch,
|
| 451 |
+
'best_fitness': best_fitness,
|
| 452 |
+
'training_results': results_file.read_text(),
|
| 453 |
+
'model': deepcopy(model.module if is_parallel(model) else model).half(),
|
| 454 |
+
'ema': deepcopy(ema.ema).half(),
|
| 455 |
+
'updates': ema.updates,
|
| 456 |
+
'optimizer': optimizer.state_dict(),
|
| 457 |
+
'wandb_id': wandb_logger.wandb_run.id if wandb_logger.wandb else None}
|
| 458 |
+
|
| 459 |
+
# Save last, best and delete
|
| 460 |
+
torch.save(ckpt, last)
|
| 461 |
+
if best_fitness == fi:
|
| 462 |
+
torch.save(ckpt, best)
|
| 463 |
+
if (best_fitness == fi) and (epoch >= 200):
|
| 464 |
+
torch.save(ckpt, wdir / 'best_{:03d}.pt'.format(epoch))
|
| 465 |
+
if epoch == 0:
|
| 466 |
+
torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
|
| 467 |
+
elif ((epoch+1) % 25) == 0:
|
| 468 |
+
torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
|
| 469 |
+
elif epoch >= (epochs-5):
|
| 470 |
+
torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))
|
| 471 |
+
if wandb_logger.wandb:
|
| 472 |
+
if ((epoch + 1) % opt.save_period == 0 and not final_epoch) and opt.save_period != -1:
|
| 473 |
+
wandb_logger.log_model(
|
| 474 |
+
last.parent, opt, epoch, fi, best_model=best_fitness == fi)
|
| 475 |
+
del ckpt
|
| 476 |
+
|
| 477 |
+
# end epoch ----------------------------------------------------------------------------------------------------
|
| 478 |
+
# end training
|
| 479 |
+
if rank in [-1, 0]:
|
| 480 |
+
# Plots
|
| 481 |
+
if plots:
|
| 482 |
+
plot_results(save_dir=save_dir) # save as results.png
|
| 483 |
+
if wandb_logger.wandb:
|
| 484 |
+
files = ['results.png', 'confusion_matrix.png', *[f'{x}_curve.png' for x in ('F1', 'PR', 'P', 'R')]]
|
| 485 |
+
wandb_logger.log({"Results": [wandb_logger.wandb.Image(str(save_dir / f), caption=f) for f in files
|
| 486 |
+
if (save_dir / f).exists()]})
|
| 487 |
+
# Test best.pt
|
| 488 |
+
logger.info('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))
|
| 489 |
+
if opt.data.endswith('coco.yaml') and nc == 80: # if COCO
|
| 490 |
+
for m in (last, best) if best.exists() else (last): # speed, mAP tests
|
| 491 |
+
results, _, _ = test.test(opt.data,
|
| 492 |
+
batch_size=batch_size * 2,
|
| 493 |
+
imgsz=imgsz_test,
|
| 494 |
+
conf_thres=0.001,
|
| 495 |
+
iou_thres=0.7,
|
| 496 |
+
model=attempt_load(m, device).half(),
|
| 497 |
+
single_cls=opt.single_cls,
|
| 498 |
+
dataloader=testloader,
|
| 499 |
+
save_dir=save_dir,
|
| 500 |
+
save_json=True,
|
| 501 |
+
plots=False,
|
| 502 |
+
is_coco=is_coco)
|
| 503 |
+
|
| 504 |
+
# Strip optimizers
|
| 505 |
+
final = best if best.exists() else last # final model
|
| 506 |
+
for f in last, best:
|
| 507 |
+
if f.exists():
|
| 508 |
+
strip_optimizer(f) # strip optimizers
|
| 509 |
+
if opt.bucket:
|
| 510 |
+
os.system(f'gsutil cp {final} gs://{opt.bucket}/weights') # upload
|
| 511 |
+
if wandb_logger.wandb and not opt.evolve: # Log the stripped model
|
| 512 |
+
wandb_logger.wandb.log_artifact(str(final), type='model',
|
| 513 |
+
name='run_' + wandb_logger.wandb_run.id + '_model',
|
| 514 |
+
aliases=['last', 'best', 'stripped'])
|
| 515 |
+
wandb_logger.finish_run()
|
| 516 |
+
else:
|
| 517 |
+
dist.destroy_process_group()
|
| 518 |
+
torch.cuda.empty_cache()
|
| 519 |
+
return results
|
| 520 |
+
|
| 521 |
+
|
| 522 |
+
if __name__ == '__main__':
|
| 523 |
+
parser = argparse.ArgumentParser()
|
| 524 |
+
parser.add_argument('--weights', type=str, default='yolo7.pt', help='initial weights path')
|
| 525 |
+
parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
|
| 526 |
+
parser.add_argument('--data', type=str, default='data/coco.yaml', help='data.yaml path')
|
| 527 |
+
parser.add_argument('--hyp', type=str, default='data/hyp.scratch.p5.yaml', help='hyperparameters path')
|
| 528 |
+
parser.add_argument('--epochs', type=int, default=300)
|
| 529 |
+
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
|
| 530 |
+
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
|
| 531 |
+
parser.add_argument('--rect', action='store_true', help='rectangular training')
|
| 532 |
+
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
|
| 533 |
+
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
|
| 534 |
+
parser.add_argument('--notest', action='store_true', help='only test final epoch')
|
| 535 |
+
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
|
| 536 |
+
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
|
| 537 |
+
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
|
| 538 |
+
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
|
| 539 |
+
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
|
| 540 |
+
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
|
| 541 |
+
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
|
| 542 |
+
parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
|
| 543 |
+
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
|
| 544 |
+
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
|
| 545 |
+
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
|
| 546 |
+
parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
|
| 547 |
+
parser.add_argument('--project', default='runs/train', help='save to project/name')
|
| 548 |
+
parser.add_argument('--entity', default=None, help='W&B entity')
|
| 549 |
+
parser.add_argument('--name', default='exp', help='save to project/name')
|
| 550 |
+
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
|
| 551 |
+
parser.add_argument('--quad', action='store_true', help='quad dataloader')
|
| 552 |
+
parser.add_argument('--linear-lr', action='store_true', help='linear LR')
|
| 553 |
+
parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
|
| 554 |
+
parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
|
| 555 |
+
parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
|
| 556 |
+
parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
|
| 557 |
+
parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
|
| 558 |
+
opt = parser.parse_args()
|
| 559 |
+
|
| 560 |
+
# Set DDP variables
|
| 561 |
+
opt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1
|
| 562 |
+
opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1
|
| 563 |
+
set_logging(opt.global_rank)
|
| 564 |
+
#if opt.global_rank in [-1, 0]:
|
| 565 |
+
# check_git_status()
|
| 566 |
+
# check_requirements()
|
| 567 |
+
|
| 568 |
+
# Resume
|
| 569 |
+
wandb_run = check_wandb_resume(opt)
|
| 570 |
+
if opt.resume and not wandb_run: # resume an interrupted run
|
| 571 |
+
ckpt = opt.resume if isinstance(opt.resume, str) else get_latest_run() # specified or most recent path
|
| 572 |
+
assert os.path.isfile(ckpt), 'ERROR: --resume checkpoint does not exist'
|
| 573 |
+
apriori = opt.global_rank, opt.local_rank
|
| 574 |
+
with open(Path(ckpt).parent.parent / 'opt.yaml') as f:
|
| 575 |
+
opt = argparse.Namespace(**yaml.load(f, Loader=yaml.SafeLoader)) # replace
|
| 576 |
+
opt.cfg, opt.weights, opt.resume, opt.batch_size, opt.global_rank, opt.local_rank = '', ckpt, True, opt.total_batch_size, *apriori # reinstate
|
| 577 |
+
logger.info('Resuming training from %s' % ckpt)
|
| 578 |
+
else:
|
| 579 |
+
# opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')
|
| 580 |
+
opt.data, opt.cfg, opt.hyp = check_file(opt.data), check_file(opt.cfg), check_file(opt.hyp) # check files
|
| 581 |
+
assert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'
|
| 582 |
+
opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
|
| 583 |
+
opt.name = 'evolve' if opt.evolve else opt.name
|
| 584 |
+
opt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run
|
| 585 |
+
|
| 586 |
+
# DDP mode
|
| 587 |
+
opt.total_batch_size = opt.batch_size
|
| 588 |
+
device = select_device(opt.device, batch_size=opt.batch_size)
|
| 589 |
+
if opt.local_rank != -1:
|
| 590 |
+
assert torch.cuda.device_count() > opt.local_rank
|
| 591 |
+
torch.cuda.set_device(opt.local_rank)
|
| 592 |
+
device = torch.device('cuda', opt.local_rank)
|
| 593 |
+
dist.init_process_group(backend='nccl', init_method='env://') # distributed backend
|
| 594 |
+
assert opt.batch_size % opt.world_size == 0, '--batch-size must be multiple of CUDA device count'
|
| 595 |
+
opt.batch_size = opt.total_batch_size // opt.world_size
|
| 596 |
+
|
| 597 |
+
# Hyperparameters
|
| 598 |
+
with open(opt.hyp) as f:
|
| 599 |
+
hyp = yaml.load(f, Loader=yaml.SafeLoader) # load hyps
|
| 600 |
+
|
| 601 |
+
# Train
|
| 602 |
+
logger.info(opt)
|
| 603 |
+
if not opt.evolve:
|
| 604 |
+
tb_writer = None # init loggers
|
| 605 |
+
if opt.global_rank in [-1, 0]:
|
| 606 |
+
prefix = colorstr('tensorboard: ')
|
| 607 |
+
logger.info(f"{prefix}Start with 'tensorboard --logdir {opt.project}', view at http://localhost:6006/")
|
| 608 |
+
tb_writer = SummaryWriter(opt.save_dir) # Tensorboard
|
| 609 |
+
train(hyp, opt, device, tb_writer)
|
| 610 |
+
|
| 611 |
+
# Evolve hyperparameters (optional)
|
| 612 |
+
else:
|
| 613 |
+
# Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
|
| 614 |
+
meta = {'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
|
| 615 |
+
'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
|
| 616 |
+
'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
|
| 617 |
+
'weight_decay': (1, 0.0, 0.001), # optimizer weight decay
|
| 618 |
+
'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)
|
| 619 |
+
'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum
|
| 620 |
+
'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr
|
| 621 |
+
'box': (1, 0.02, 0.2), # box loss gain
|
| 622 |
+
'cls': (1, 0.2, 4.0), # cls loss gain
|
| 623 |
+
'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight
|
| 624 |
+
'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)
|
| 625 |
+
'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight
|
| 626 |
+
'iou_t': (0, 0.1, 0.7), # IoU training threshold
|
| 627 |
+
'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold
|
| 628 |
+
'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
|
| 629 |
+
'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
|
| 630 |
+
'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
|
| 631 |
+
'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
|
| 632 |
+
'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
|
| 633 |
+
'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)
|
| 634 |
+
'translate': (1, 0.0, 0.9), # image translation (+/- fraction)
|
| 635 |
+
'scale': (1, 0.0, 0.9), # image scale (+/- gain)
|
| 636 |
+
'shear': (1, 0.0, 10.0), # image shear (+/- deg)
|
| 637 |
+
'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
|
| 638 |
+
'flipud': (1, 0.0, 1.0), # image flip up-down (probability)
|
| 639 |
+
'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)
|
| 640 |
+
'mosaic': (1, 0.0, 1.0), # image mixup (probability)
|
| 641 |
+
'mixup': (1, 0.0, 1.0)} # image mixup (probability)
|
| 642 |
+
|
| 643 |
+
assert opt.local_rank == -1, 'DDP mode not implemented for --evolve'
|
| 644 |
+
opt.notest, opt.nosave = True, True # only test/save final epoch
|
| 645 |
+
# ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
|
| 646 |
+
yaml_file = Path(opt.save_dir) / 'hyp_evolved.yaml' # save best result here
|
| 647 |
+
if opt.bucket:
|
| 648 |
+
os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
|
| 649 |
+
|
| 650 |
+
for _ in range(300): # generations to evolve
|
| 651 |
+
if Path('evolve.txt').exists(): # if evolve.txt exists: select best hyps and mutate
|
| 652 |
+
# Select parent(s)
|
| 653 |
+
parent = 'single' # parent selection method: 'single' or 'weighted'
|
| 654 |
+
x = np.loadtxt('evolve.txt', ndmin=2)
|
| 655 |
+
n = min(5, len(x)) # number of previous results to consider
|
| 656 |
+
x = x[np.argsort(-fitness(x))][:n] # top n mutations
|
| 657 |
+
w = fitness(x) - fitness(x).min() # weights
|
| 658 |
+
if parent == 'single' or len(x) == 1:
|
| 659 |
+
# x = x[random.randint(0, n - 1)] # random selection
|
| 660 |
+
x = x[random.choices(range(n), weights=w)[0]] # weighted selection
|
| 661 |
+
elif parent == 'weighted':
|
| 662 |
+
x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
|
| 663 |
+
|
| 664 |
+
# Mutate
|
| 665 |
+
mp, s = 0.8, 0.2 # mutation probability, sigma
|
| 666 |
+
npr = np.random
|
| 667 |
+
npr.seed(int(time.time()))
|
| 668 |
+
g = np.array([x[0] for x in meta.values()]) # gains 0-1
|
| 669 |
+
ng = len(meta)
|
| 670 |
+
v = np.ones(ng)
|
| 671 |
+
while all(v == 1): # mutate until a change occurs (prevent duplicates)
|
| 672 |
+
v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
|
| 673 |
+
for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
|
| 674 |
+
hyp[k] = float(x[i + 7] * v[i]) # mutate
|
| 675 |
+
|
| 676 |
+
# Constrain to limits
|
| 677 |
+
for k, v in meta.items():
|
| 678 |
+
hyp[k] = max(hyp[k], v[1]) # lower limit
|
| 679 |
+
hyp[k] = min(hyp[k], v[2]) # upper limit
|
| 680 |
+
hyp[k] = round(hyp[k], 5) # significant digits
|
| 681 |
+
|
| 682 |
+
# Train mutation
|
| 683 |
+
results = train(hyp.copy(), opt, device)
|
| 684 |
+
|
| 685 |
+
# Write mutation results
|
| 686 |
+
print_mutation(hyp.copy(), results, yaml_file, opt.bucket)
|
| 687 |
+
|
| 688 |
+
# Plot results
|
| 689 |
+
plot_evolution(yaml_file)
|
| 690 |
+
print(f'Hyperparameter evolution complete. Best results saved as: {yaml_file}\n'
|
| 691 |
+
f'Command to train a new model with these hyperparameters: $ python train.py --hyp {yaml_file}')
|
utils/__init__.py
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
# init
|
utils/activations.py
ADDED
|
@@ -0,0 +1,72 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Activation functions
|
| 2 |
+
|
| 3 |
+
import torch
|
| 4 |
+
import torch.nn as nn
|
| 5 |
+
import torch.nn.functional as F
|
| 6 |
+
|
| 7 |
+
|
| 8 |
+
# SiLU https://arxiv.org/pdf/1606.08415.pdf ----------------------------------------------------------------------------
|
| 9 |
+
class SiLU(nn.Module): # export-friendly version of nn.SiLU()
|
| 10 |
+
@staticmethod
|
| 11 |
+
def forward(x):
|
| 12 |
+
return x * torch.sigmoid(x)
|
| 13 |
+
|
| 14 |
+
|
| 15 |
+
class Hardswish(nn.Module): # export-friendly version of nn.Hardswish()
|
| 16 |
+
@staticmethod
|
| 17 |
+
def forward(x):
|
| 18 |
+
# return x * F.hardsigmoid(x) # for torchscript and CoreML
|
| 19 |
+
return x * F.hardtanh(x + 3, 0., 6.) / 6. # for torchscript, CoreML and ONNX
|
| 20 |
+
|
| 21 |
+
|
| 22 |
+
class MemoryEfficientSwish(nn.Module):
|
| 23 |
+
class F(torch.autograd.Function):
|
| 24 |
+
@staticmethod
|
| 25 |
+
def forward(ctx, x):
|
| 26 |
+
ctx.save_for_backward(x)
|
| 27 |
+
return x * torch.sigmoid(x)
|
| 28 |
+
|
| 29 |
+
@staticmethod
|
| 30 |
+
def backward(ctx, grad_output):
|
| 31 |
+
x = ctx.saved_tensors[0]
|
| 32 |
+
sx = torch.sigmoid(x)
|
| 33 |
+
return grad_output * (sx * (1 + x * (1 - sx)))
|
| 34 |
+
|
| 35 |
+
def forward(self, x):
|
| 36 |
+
return self.F.apply(x)
|
| 37 |
+
|
| 38 |
+
|
| 39 |
+
# Mish https://github.com/digantamisra98/Mish --------------------------------------------------------------------------
|
| 40 |
+
class Mish(nn.Module):
|
| 41 |
+
@staticmethod
|
| 42 |
+
def forward(x):
|
| 43 |
+
return x * F.softplus(x).tanh()
|
| 44 |
+
|
| 45 |
+
|
| 46 |
+
class MemoryEfficientMish(nn.Module):
|
| 47 |
+
class F(torch.autograd.Function):
|
| 48 |
+
@staticmethod
|
| 49 |
+
def forward(ctx, x):
|
| 50 |
+
ctx.save_for_backward(x)
|
| 51 |
+
return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
|
| 52 |
+
|
| 53 |
+
@staticmethod
|
| 54 |
+
def backward(ctx, grad_output):
|
| 55 |
+
x = ctx.saved_tensors[0]
|
| 56 |
+
sx = torch.sigmoid(x)
|
| 57 |
+
fx = F.softplus(x).tanh()
|
| 58 |
+
return grad_output * (fx + x * sx * (1 - fx * fx))
|
| 59 |
+
|
| 60 |
+
def forward(self, x):
|
| 61 |
+
return self.F.apply(x)
|
| 62 |
+
|
| 63 |
+
|
| 64 |
+
# FReLU https://arxiv.org/abs/2007.11824 -------------------------------------------------------------------------------
|
| 65 |
+
class FReLU(nn.Module):
|
| 66 |
+
def __init__(self, c1, k=3): # ch_in, kernel
|
| 67 |
+
super().__init__()
|
| 68 |
+
self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
|
| 69 |
+
self.bn = nn.BatchNorm2d(c1)
|
| 70 |
+
|
| 71 |
+
def forward(self, x):
|
| 72 |
+
return torch.max(x, self.bn(self.conv(x)))
|
utils/autoanchor.py
ADDED
|
@@ -0,0 +1,160 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Auto-anchor utils
|
| 2 |
+
|
| 3 |
+
import numpy as np
|
| 4 |
+
import torch
|
| 5 |
+
import yaml
|
| 6 |
+
from scipy.cluster.vq import kmeans
|
| 7 |
+
from tqdm import tqdm
|
| 8 |
+
|
| 9 |
+
from utils.general import colorstr
|
| 10 |
+
|
| 11 |
+
|
| 12 |
+
def check_anchor_order(m):
|
| 13 |
+
# Check anchor order against stride order for YOLO Detect() module m, and correct if necessary
|
| 14 |
+
a = m.anchor_grid.prod(-1).view(-1) # anchor area
|
| 15 |
+
da = a[-1] - a[0] # delta a
|
| 16 |
+
ds = m.stride[-1] - m.stride[0] # delta s
|
| 17 |
+
if da.sign() != ds.sign(): # same order
|
| 18 |
+
print('Reversing anchor order')
|
| 19 |
+
m.anchors[:] = m.anchors.flip(0)
|
| 20 |
+
m.anchor_grid[:] = m.anchor_grid.flip(0)
|
| 21 |
+
|
| 22 |
+
|
| 23 |
+
def check_anchors(dataset, model, thr=4.0, imgsz=640):
|
| 24 |
+
# Check anchor fit to data, recompute if necessary
|
| 25 |
+
prefix = colorstr('autoanchor: ')
|
| 26 |
+
print(f'\n{prefix}Analyzing anchors... ', end='')
|
| 27 |
+
m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
|
| 28 |
+
shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
|
| 29 |
+
scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
|
| 30 |
+
wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
|
| 31 |
+
|
| 32 |
+
def metric(k): # compute metric
|
| 33 |
+
r = wh[:, None] / k[None]
|
| 34 |
+
x = torch.min(r, 1. / r).min(2)[0] # ratio metric
|
| 35 |
+
best = x.max(1)[0] # best_x
|
| 36 |
+
aat = (x > 1. / thr).float().sum(1).mean() # anchors above threshold
|
| 37 |
+
bpr = (best > 1. / thr).float().mean() # best possible recall
|
| 38 |
+
return bpr, aat
|
| 39 |
+
|
| 40 |
+
anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors
|
| 41 |
+
bpr, aat = metric(anchors)
|
| 42 |
+
print(f'anchors/target = {aat:.2f}, Best Possible Recall (BPR) = {bpr:.4f}', end='')
|
| 43 |
+
if bpr < 0.98: # threshold to recompute
|
| 44 |
+
print('. Attempting to improve anchors, please wait...')
|
| 45 |
+
na = m.anchor_grid.numel() // 2 # number of anchors
|
| 46 |
+
try:
|
| 47 |
+
anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
|
| 48 |
+
except Exception as e:
|
| 49 |
+
print(f'{prefix}ERROR: {e}')
|
| 50 |
+
new_bpr = metric(anchors)[0]
|
| 51 |
+
if new_bpr > bpr: # replace anchors
|
| 52 |
+
anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
|
| 53 |
+
m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference
|
| 54 |
+
m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
|
| 55 |
+
check_anchor_order(m)
|
| 56 |
+
print(f'{prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')
|
| 57 |
+
else:
|
| 58 |
+
print(f'{prefix}Original anchors better than new anchors. Proceeding with original anchors.')
|
| 59 |
+
print('') # newline
|
| 60 |
+
|
| 61 |
+
|
| 62 |
+
def kmean_anchors(path='./data/coco.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
|
| 63 |
+
""" Creates kmeans-evolved anchors from training dataset
|
| 64 |
+
|
| 65 |
+
Arguments:
|
| 66 |
+
path: path to dataset *.yaml, or a loaded dataset
|
| 67 |
+
n: number of anchors
|
| 68 |
+
img_size: image size used for training
|
| 69 |
+
thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
|
| 70 |
+
gen: generations to evolve anchors using genetic algorithm
|
| 71 |
+
verbose: print all results
|
| 72 |
+
|
| 73 |
+
Return:
|
| 74 |
+
k: kmeans evolved anchors
|
| 75 |
+
|
| 76 |
+
Usage:
|
| 77 |
+
from utils.autoanchor import *; _ = kmean_anchors()
|
| 78 |
+
"""
|
| 79 |
+
thr = 1. / thr
|
| 80 |
+
prefix = colorstr('autoanchor: ')
|
| 81 |
+
|
| 82 |
+
def metric(k, wh): # compute metrics
|
| 83 |
+
r = wh[:, None] / k[None]
|
| 84 |
+
x = torch.min(r, 1. / r).min(2)[0] # ratio metric
|
| 85 |
+
# x = wh_iou(wh, torch.tensor(k)) # iou metric
|
| 86 |
+
return x, x.max(1)[0] # x, best_x
|
| 87 |
+
|
| 88 |
+
def anchor_fitness(k): # mutation fitness
|
| 89 |
+
_, best = metric(torch.tensor(k, dtype=torch.float32), wh)
|
| 90 |
+
return (best * (best > thr).float()).mean() # fitness
|
| 91 |
+
|
| 92 |
+
def print_results(k):
|
| 93 |
+
k = k[np.argsort(k.prod(1))] # sort small to large
|
| 94 |
+
x, best = metric(k, wh0)
|
| 95 |
+
bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
|
| 96 |
+
print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
|
| 97 |
+
print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
|
| 98 |
+
f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
|
| 99 |
+
for i, x in enumerate(k):
|
| 100 |
+
print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
|
| 101 |
+
return k
|
| 102 |
+
|
| 103 |
+
if isinstance(path, str): # *.yaml file
|
| 104 |
+
with open(path) as f:
|
| 105 |
+
data_dict = yaml.load(f, Loader=yaml.SafeLoader) # model dict
|
| 106 |
+
from utils.datasets import LoadImagesAndLabels
|
| 107 |
+
dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
|
| 108 |
+
else:
|
| 109 |
+
dataset = path # dataset
|
| 110 |
+
|
| 111 |
+
# Get label wh
|
| 112 |
+
shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
|
| 113 |
+
wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
|
| 114 |
+
|
| 115 |
+
# Filter
|
| 116 |
+
i = (wh0 < 3.0).any(1).sum()
|
| 117 |
+
if i:
|
| 118 |
+
print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
|
| 119 |
+
wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
|
| 120 |
+
# wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
|
| 121 |
+
|
| 122 |
+
# Kmeans calculation
|
| 123 |
+
print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
|
| 124 |
+
s = wh.std(0) # sigmas for whitening
|
| 125 |
+
k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
|
| 126 |
+
assert len(k) == n, print(f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}')
|
| 127 |
+
k *= s
|
| 128 |
+
wh = torch.tensor(wh, dtype=torch.float32) # filtered
|
| 129 |
+
wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
|
| 130 |
+
k = print_results(k)
|
| 131 |
+
|
| 132 |
+
# Plot
|
| 133 |
+
# k, d = [None] * 20, [None] * 20
|
| 134 |
+
# for i in tqdm(range(1, 21)):
|
| 135 |
+
# k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
|
| 136 |
+
# fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
|
| 137 |
+
# ax = ax.ravel()
|
| 138 |
+
# ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
|
| 139 |
+
# fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
|
| 140 |
+
# ax[0].hist(wh[wh[:, 0]<100, 0],400)
|
| 141 |
+
# ax[1].hist(wh[wh[:, 1]<100, 1],400)
|
| 142 |
+
# fig.savefig('wh.png', dpi=200)
|
| 143 |
+
|
| 144 |
+
# Evolve
|
| 145 |
+
npr = np.random
|
| 146 |
+
f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
|
| 147 |
+
pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
|
| 148 |
+
for _ in pbar:
|
| 149 |
+
v = np.ones(sh)
|
| 150 |
+
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
|
| 151 |
+
v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
|
| 152 |
+
kg = (k.copy() * v).clip(min=2.0)
|
| 153 |
+
fg = anchor_fitness(kg)
|
| 154 |
+
if fg > f:
|
| 155 |
+
f, k = fg, kg.copy()
|
| 156 |
+
pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
|
| 157 |
+
if verbose:
|
| 158 |
+
print_results(k)
|
| 159 |
+
|
| 160 |
+
return print_results(k)
|
utils/aws/__init__.py
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
#init
|
utils/aws/mime.sh
ADDED
|
@@ -0,0 +1,26 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
|
| 2 |
+
# This script will run on every instance restart, not only on first start
|
| 3 |
+
# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
|
| 4 |
+
|
| 5 |
+
Content-Type: multipart/mixed; boundary="//"
|
| 6 |
+
MIME-Version: 1.0
|
| 7 |
+
|
| 8 |
+
--//
|
| 9 |
+
Content-Type: text/cloud-config; charset="us-ascii"
|
| 10 |
+
MIME-Version: 1.0
|
| 11 |
+
Content-Transfer-Encoding: 7bit
|
| 12 |
+
Content-Disposition: attachment; filename="cloud-config.txt"
|
| 13 |
+
|
| 14 |
+
#cloud-config
|
| 15 |
+
cloud_final_modules:
|
| 16 |
+
- [scripts-user, always]
|
| 17 |
+
|
| 18 |
+
--//
|
| 19 |
+
Content-Type: text/x-shellscript; charset="us-ascii"
|
| 20 |
+
MIME-Version: 1.0
|
| 21 |
+
Content-Transfer-Encoding: 7bit
|
| 22 |
+
Content-Disposition: attachment; filename="userdata.txt"
|
| 23 |
+
|
| 24 |
+
#!/bin/bash
|
| 25 |
+
# --- paste contents of userdata.sh here ---
|
| 26 |
+
--//
|
utils/aws/resume.py
ADDED
|
@@ -0,0 +1,37 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Resume all interrupted trainings in yolor/ dir including DDP trainings
|
| 2 |
+
# Usage: $ python utils/aws/resume.py
|
| 3 |
+
|
| 4 |
+
import os
|
| 5 |
+
import sys
|
| 6 |
+
from pathlib import Path
|
| 7 |
+
|
| 8 |
+
import torch
|
| 9 |
+
import yaml
|
| 10 |
+
|
| 11 |
+
sys.path.append('./') # to run '$ python *.py' files in subdirectories
|
| 12 |
+
|
| 13 |
+
port = 0 # --master_port
|
| 14 |
+
path = Path('').resolve()
|
| 15 |
+
for last in path.rglob('*/**/last.pt'):
|
| 16 |
+
ckpt = torch.load(last)
|
| 17 |
+
if ckpt['optimizer'] is None:
|
| 18 |
+
continue
|
| 19 |
+
|
| 20 |
+
# Load opt.yaml
|
| 21 |
+
with open(last.parent.parent / 'opt.yaml') as f:
|
| 22 |
+
opt = yaml.load(f, Loader=yaml.SafeLoader)
|
| 23 |
+
|
| 24 |
+
# Get device count
|
| 25 |
+
d = opt['device'].split(',') # devices
|
| 26 |
+
nd = len(d) # number of devices
|
| 27 |
+
ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
|
| 28 |
+
|
| 29 |
+
if ddp: # multi-GPU
|
| 30 |
+
port += 1
|
| 31 |
+
cmd = f'python -m torch.distributed.launch --nproc_per_node {nd} --master_port {port} train.py --resume {last}'
|
| 32 |
+
else: # single-GPU
|
| 33 |
+
cmd = f'python train.py --resume {last}'
|
| 34 |
+
|
| 35 |
+
cmd += ' > /dev/null 2>&1 &' # redirect output to dev/null and run in daemon thread
|
| 36 |
+
print(cmd)
|
| 37 |
+
os.system(cmd)
|
utils/aws/userdata.sh
ADDED
|
@@ -0,0 +1,27 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/bin/bash
|
| 2 |
+
# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
|
| 3 |
+
# This script will run only once on first instance start (for a re-start script see mime.sh)
|
| 4 |
+
# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
|
| 5 |
+
# Use >300 GB SSD
|
| 6 |
+
|
| 7 |
+
cd home/ubuntu
|
| 8 |
+
if [ ! -d yolor ]; then
|
| 9 |
+
echo "Running first-time script." # install dependencies, download COCO, pull Docker
|
| 10 |
+
git clone -b paper https://github.com/WongKinYiu/yolor && sudo chmod -R 777 yolor
|
| 11 |
+
cd yolor
|
| 12 |
+
bash data/scripts/get_coco.sh && echo "Data done." &
|
| 13 |
+
sudo docker pull nvcr.io/nvidia/pytorch:21.08-py3 && echo "Docker done." &
|
| 14 |
+
python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
|
| 15 |
+
wait && echo "All tasks done." # finish background tasks
|
| 16 |
+
else
|
| 17 |
+
echo "Running re-start script." # resume interrupted runs
|
| 18 |
+
i=0
|
| 19 |
+
list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
|
| 20 |
+
while IFS= read -r id; do
|
| 21 |
+
((i++))
|
| 22 |
+
echo "restarting container $i: $id"
|
| 23 |
+
sudo docker start $id
|
| 24 |
+
# sudo docker exec -it $id python train.py --resume # single-GPU
|
| 25 |
+
sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
|
| 26 |
+
done <<<"$list"
|
| 27 |
+
fi
|
utils/datasets.py
ADDED
|
@@ -0,0 +1,1320 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Dataset utils and dataloaders
|
| 2 |
+
|
| 3 |
+
import glob
|
| 4 |
+
import logging
|
| 5 |
+
import math
|
| 6 |
+
import os
|
| 7 |
+
import random
|
| 8 |
+
import shutil
|
| 9 |
+
import time
|
| 10 |
+
from itertools import repeat
|
| 11 |
+
from multiprocessing.pool import ThreadPool
|
| 12 |
+
from pathlib import Path
|
| 13 |
+
from threading import Thread
|
| 14 |
+
|
| 15 |
+
import cv2
|
| 16 |
+
import numpy as np
|
| 17 |
+
import torch
|
| 18 |
+
import torch.nn.functional as F
|
| 19 |
+
from PIL import Image, ExifTags
|
| 20 |
+
from torch.utils.data import Dataset
|
| 21 |
+
from tqdm import tqdm
|
| 22 |
+
|
| 23 |
+
import pickle
|
| 24 |
+
from copy import deepcopy
|
| 25 |
+
#from pycocotools import mask as maskUtils
|
| 26 |
+
from torchvision.utils import save_image
|
| 27 |
+
from torchvision.ops import roi_pool, roi_align, ps_roi_pool, ps_roi_align
|
| 28 |
+
|
| 29 |
+
from utils.general import check_requirements, xyxy2xywh, xywh2xyxy, xywhn2xyxy, xyn2xy, segment2box, segments2boxes, \
|
| 30 |
+
resample_segments, clean_str
|
| 31 |
+
from utils.torch_utils import torch_distributed_zero_first
|
| 32 |
+
|
| 33 |
+
# Parameters
|
| 34 |
+
help_url = 'https://github.com/ultralytics/yolov5/wiki/Train-Custom-Data'
|
| 35 |
+
img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo'] # acceptable image suffixes
|
| 36 |
+
vid_formats = ['mov', 'avi', 'mp4', 'mpg', 'mpeg', 'm4v', 'wmv', 'mkv'] # acceptable video suffixes
|
| 37 |
+
logger = logging.getLogger(__name__)
|
| 38 |
+
|
| 39 |
+
# Get orientation exif tag
|
| 40 |
+
for orientation in ExifTags.TAGS.keys():
|
| 41 |
+
if ExifTags.TAGS[orientation] == 'Orientation':
|
| 42 |
+
break
|
| 43 |
+
|
| 44 |
+
|
| 45 |
+
def get_hash(files):
|
| 46 |
+
# Returns a single hash value of a list of files
|
| 47 |
+
return sum(os.path.getsize(f) for f in files if os.path.isfile(f))
|
| 48 |
+
|
| 49 |
+
|
| 50 |
+
def exif_size(img):
|
| 51 |
+
# Returns exif-corrected PIL size
|
| 52 |
+
s = img.size # (width, height)
|
| 53 |
+
try:
|
| 54 |
+
rotation = dict(img._getexif().items())[orientation]
|
| 55 |
+
if rotation == 6: # rotation 270
|
| 56 |
+
s = (s[1], s[0])
|
| 57 |
+
elif rotation == 8: # rotation 90
|
| 58 |
+
s = (s[1], s[0])
|
| 59 |
+
except:
|
| 60 |
+
pass
|
| 61 |
+
|
| 62 |
+
return s
|
| 63 |
+
|
| 64 |
+
|
| 65 |
+
def create_dataloader(path, imgsz, batch_size, stride, opt, hyp=None, augment=False, cache=False, pad=0.0, rect=False,
|
| 66 |
+
rank=-1, world_size=1, workers=8, image_weights=False, quad=False, prefix=''):
|
| 67 |
+
# Make sure only the first process in DDP process the dataset first, and the following others can use the cache
|
| 68 |
+
with torch_distributed_zero_first(rank):
|
| 69 |
+
dataset = LoadImagesAndLabels(path, imgsz, batch_size,
|
| 70 |
+
augment=augment, # augment images
|
| 71 |
+
hyp=hyp, # augmentation hyperparameters
|
| 72 |
+
rect=rect, # rectangular training
|
| 73 |
+
cache_images=cache,
|
| 74 |
+
single_cls=opt.single_cls,
|
| 75 |
+
stride=int(stride),
|
| 76 |
+
pad=pad,
|
| 77 |
+
image_weights=image_weights,
|
| 78 |
+
prefix=prefix)
|
| 79 |
+
|
| 80 |
+
batch_size = min(batch_size, len(dataset))
|
| 81 |
+
nw = min([os.cpu_count() // world_size, batch_size if batch_size > 1 else 0, workers]) # number of workers
|
| 82 |
+
sampler = torch.utils.data.distributed.DistributedSampler(dataset) if rank != -1 else None
|
| 83 |
+
loader = torch.utils.data.DataLoader if image_weights else InfiniteDataLoader
|
| 84 |
+
# Use torch.utils.data.DataLoader() if dataset.properties will update during training else InfiniteDataLoader()
|
| 85 |
+
dataloader = loader(dataset,
|
| 86 |
+
batch_size=batch_size,
|
| 87 |
+
num_workers=nw,
|
| 88 |
+
sampler=sampler,
|
| 89 |
+
pin_memory=True,
|
| 90 |
+
collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn)
|
| 91 |
+
return dataloader, dataset
|
| 92 |
+
|
| 93 |
+
|
| 94 |
+
class InfiniteDataLoader(torch.utils.data.dataloader.DataLoader):
|
| 95 |
+
""" Dataloader that reuses workers
|
| 96 |
+
|
| 97 |
+
Uses same syntax as vanilla DataLoader
|
| 98 |
+
"""
|
| 99 |
+
|
| 100 |
+
def __init__(self, *args, **kwargs):
|
| 101 |
+
super().__init__(*args, **kwargs)
|
| 102 |
+
object.__setattr__(self, 'batch_sampler', _RepeatSampler(self.batch_sampler))
|
| 103 |
+
self.iterator = super().__iter__()
|
| 104 |
+
|
| 105 |
+
def __len__(self):
|
| 106 |
+
return len(self.batch_sampler.sampler)
|
| 107 |
+
|
| 108 |
+
def __iter__(self):
|
| 109 |
+
for i in range(len(self)):
|
| 110 |
+
yield next(self.iterator)
|
| 111 |
+
|
| 112 |
+
|
| 113 |
+
class _RepeatSampler(object):
|
| 114 |
+
""" Sampler that repeats forever
|
| 115 |
+
|
| 116 |
+
Args:
|
| 117 |
+
sampler (Sampler)
|
| 118 |
+
"""
|
| 119 |
+
|
| 120 |
+
def __init__(self, sampler):
|
| 121 |
+
self.sampler = sampler
|
| 122 |
+
|
| 123 |
+
def __iter__(self):
|
| 124 |
+
while True:
|
| 125 |
+
yield from iter(self.sampler)
|
| 126 |
+
|
| 127 |
+
|
| 128 |
+
class LoadImages: # for inference
|
| 129 |
+
def __init__(self, path, img_size=640, stride=32):
|
| 130 |
+
p = str(Path(path).absolute()) # os-agnostic absolute path
|
| 131 |
+
if '*' in p:
|
| 132 |
+
files = sorted(glob.glob(p, recursive=True)) # glob
|
| 133 |
+
elif os.path.isdir(p):
|
| 134 |
+
files = sorted(glob.glob(os.path.join(p, '*.*'))) # dir
|
| 135 |
+
elif os.path.isfile(p):
|
| 136 |
+
files = [p] # files
|
| 137 |
+
else:
|
| 138 |
+
raise Exception(f'ERROR: {p} does not exist')
|
| 139 |
+
|
| 140 |
+
images = [x for x in files if x.split('.')[-1].lower() in img_formats]
|
| 141 |
+
videos = [x for x in files if x.split('.')[-1].lower() in vid_formats]
|
| 142 |
+
ni, nv = len(images), len(videos)
|
| 143 |
+
|
| 144 |
+
self.img_size = img_size
|
| 145 |
+
self.stride = stride
|
| 146 |
+
self.files = images + videos
|
| 147 |
+
self.nf = ni + nv # number of files
|
| 148 |
+
self.video_flag = [False] * ni + [True] * nv
|
| 149 |
+
self.mode = 'image'
|
| 150 |
+
if any(videos):
|
| 151 |
+
self.new_video(videos[0]) # new video
|
| 152 |
+
else:
|
| 153 |
+
self.cap = None
|
| 154 |
+
assert self.nf > 0, f'No images or videos found in {p}. ' \
|
| 155 |
+
f'Supported formats are:\nimages: {img_formats}\nvideos: {vid_formats}'
|
| 156 |
+
|
| 157 |
+
def __iter__(self):
|
| 158 |
+
self.count = 0
|
| 159 |
+
return self
|
| 160 |
+
|
| 161 |
+
def __next__(self):
|
| 162 |
+
if self.count == self.nf:
|
| 163 |
+
raise StopIteration
|
| 164 |
+
path = self.files[self.count]
|
| 165 |
+
|
| 166 |
+
if self.video_flag[self.count]:
|
| 167 |
+
# Read video
|
| 168 |
+
self.mode = 'video'
|
| 169 |
+
ret_val, img0 = self.cap.read()
|
| 170 |
+
if not ret_val:
|
| 171 |
+
self.count += 1
|
| 172 |
+
self.cap.release()
|
| 173 |
+
if self.count == self.nf: # last video
|
| 174 |
+
raise StopIteration
|
| 175 |
+
else:
|
| 176 |
+
path = self.files[self.count]
|
| 177 |
+
self.new_video(path)
|
| 178 |
+
ret_val, img0 = self.cap.read()
|
| 179 |
+
|
| 180 |
+
self.frame += 1
|
| 181 |
+
print(f'video {self.count + 1}/{self.nf} ({self.frame}/{self.nframes}) {path}: ', end='')
|
| 182 |
+
|
| 183 |
+
else:
|
| 184 |
+
# Read image
|
| 185 |
+
self.count += 1
|
| 186 |
+
img0 = cv2.imread(path) # BGR
|
| 187 |
+
assert img0 is not None, 'Image Not Found ' + path
|
| 188 |
+
#print(f'image {self.count}/{self.nf} {path}: ', end='')
|
| 189 |
+
|
| 190 |
+
# Padded resize
|
| 191 |
+
img = letterbox(img0, self.img_size, stride=self.stride)[0]
|
| 192 |
+
|
| 193 |
+
# Convert
|
| 194 |
+
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
|
| 195 |
+
img = np.ascontiguousarray(img)
|
| 196 |
+
|
| 197 |
+
return path, img, img0, self.cap
|
| 198 |
+
|
| 199 |
+
def new_video(self, path):
|
| 200 |
+
self.frame = 0
|
| 201 |
+
self.cap = cv2.VideoCapture(path)
|
| 202 |
+
self.nframes = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT))
|
| 203 |
+
|
| 204 |
+
def __len__(self):
|
| 205 |
+
return self.nf # number of files
|
| 206 |
+
|
| 207 |
+
|
| 208 |
+
class LoadWebcam: # for inference
|
| 209 |
+
def __init__(self, pipe='0', img_size=640, stride=32):
|
| 210 |
+
self.img_size = img_size
|
| 211 |
+
self.stride = stride
|
| 212 |
+
|
| 213 |
+
if pipe.isnumeric():
|
| 214 |
+
pipe = eval(pipe) # local camera
|
| 215 |
+
# pipe = 'rtsp://192.168.1.64/1' # IP camera
|
| 216 |
+
# pipe = 'rtsp://username:password@192.168.1.64/1' # IP camera with login
|
| 217 |
+
# pipe = 'http://wmccpinetop.axiscam.net/mjpg/video.mjpg' # IP golf camera
|
| 218 |
+
|
| 219 |
+
self.pipe = pipe
|
| 220 |
+
self.cap = cv2.VideoCapture(pipe) # video capture object
|
| 221 |
+
self.cap.set(cv2.CAP_PROP_BUFFERSIZE, 3) # set buffer size
|
| 222 |
+
|
| 223 |
+
def __iter__(self):
|
| 224 |
+
self.count = -1
|
| 225 |
+
return self
|
| 226 |
+
|
| 227 |
+
def __next__(self):
|
| 228 |
+
self.count += 1
|
| 229 |
+
if cv2.waitKey(1) == ord('q'): # q to quit
|
| 230 |
+
self.cap.release()
|
| 231 |
+
cv2.destroyAllWindows()
|
| 232 |
+
raise StopIteration
|
| 233 |
+
|
| 234 |
+
# Read frame
|
| 235 |
+
if self.pipe == 0: # local camera
|
| 236 |
+
ret_val, img0 = self.cap.read()
|
| 237 |
+
img0 = cv2.flip(img0, 1) # flip left-right
|
| 238 |
+
else: # IP camera
|
| 239 |
+
n = 0
|
| 240 |
+
while True:
|
| 241 |
+
n += 1
|
| 242 |
+
self.cap.grab()
|
| 243 |
+
if n % 30 == 0: # skip frames
|
| 244 |
+
ret_val, img0 = self.cap.retrieve()
|
| 245 |
+
if ret_val:
|
| 246 |
+
break
|
| 247 |
+
|
| 248 |
+
# Print
|
| 249 |
+
assert ret_val, f'Camera Error {self.pipe}'
|
| 250 |
+
img_path = 'webcam.jpg'
|
| 251 |
+
print(f'webcam {self.count}: ', end='')
|
| 252 |
+
|
| 253 |
+
# Padded resize
|
| 254 |
+
img = letterbox(img0, self.img_size, stride=self.stride)[0]
|
| 255 |
+
|
| 256 |
+
# Convert
|
| 257 |
+
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
|
| 258 |
+
img = np.ascontiguousarray(img)
|
| 259 |
+
|
| 260 |
+
return img_path, img, img0, None
|
| 261 |
+
|
| 262 |
+
def __len__(self):
|
| 263 |
+
return 0
|
| 264 |
+
|
| 265 |
+
|
| 266 |
+
class LoadStreams: # multiple IP or RTSP cameras
|
| 267 |
+
def __init__(self, sources='streams.txt', img_size=640, stride=32):
|
| 268 |
+
self.mode = 'stream'
|
| 269 |
+
self.img_size = img_size
|
| 270 |
+
self.stride = stride
|
| 271 |
+
|
| 272 |
+
if os.path.isfile(sources):
|
| 273 |
+
with open(sources, 'r') as f:
|
| 274 |
+
sources = [x.strip() for x in f.read().strip().splitlines() if len(x.strip())]
|
| 275 |
+
else:
|
| 276 |
+
sources = [sources]
|
| 277 |
+
|
| 278 |
+
n = len(sources)
|
| 279 |
+
self.imgs = [None] * n
|
| 280 |
+
self.sources = [clean_str(x) for x in sources] # clean source names for later
|
| 281 |
+
for i, s in enumerate(sources):
|
| 282 |
+
# Start the thread to read frames from the video stream
|
| 283 |
+
print(f'{i + 1}/{n}: {s}... ', end='')
|
| 284 |
+
url = eval(s) if s.isnumeric() else s
|
| 285 |
+
if 'youtube.com/' in url or 'youtu.be/' in url: # if source is YouTube video
|
| 286 |
+
check_requirements(('pafy', 'youtube_dl'))
|
| 287 |
+
import pafy
|
| 288 |
+
url = pafy.new(url).getbest(preftype="mp4").url
|
| 289 |
+
cap = cv2.VideoCapture(url)
|
| 290 |
+
assert cap.isOpened(), f'Failed to open {s}'
|
| 291 |
+
w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
|
| 292 |
+
h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
|
| 293 |
+
self.fps = cap.get(cv2.CAP_PROP_FPS) % 100
|
| 294 |
+
|
| 295 |
+
_, self.imgs[i] = cap.read() # guarantee first frame
|
| 296 |
+
thread = Thread(target=self.update, args=([i, cap]), daemon=True)
|
| 297 |
+
print(f' success ({w}x{h} at {self.fps:.2f} FPS).')
|
| 298 |
+
thread.start()
|
| 299 |
+
print('') # newline
|
| 300 |
+
|
| 301 |
+
# check for common shapes
|
| 302 |
+
s = np.stack([letterbox(x, self.img_size, stride=self.stride)[0].shape for x in self.imgs], 0) # shapes
|
| 303 |
+
self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
|
| 304 |
+
if not self.rect:
|
| 305 |
+
print('WARNING: Different stream shapes detected. For optimal performance supply similarly-shaped streams.')
|
| 306 |
+
|
| 307 |
+
def update(self, index, cap):
|
| 308 |
+
# Read next stream frame in a daemon thread
|
| 309 |
+
n = 0
|
| 310 |
+
while cap.isOpened():
|
| 311 |
+
n += 1
|
| 312 |
+
# _, self.imgs[index] = cap.read()
|
| 313 |
+
cap.grab()
|
| 314 |
+
if n == 4: # read every 4th frame
|
| 315 |
+
success, im = cap.retrieve()
|
| 316 |
+
self.imgs[index] = im if success else self.imgs[index] * 0
|
| 317 |
+
n = 0
|
| 318 |
+
time.sleep(1 / self.fps) # wait time
|
| 319 |
+
|
| 320 |
+
def __iter__(self):
|
| 321 |
+
self.count = -1
|
| 322 |
+
return self
|
| 323 |
+
|
| 324 |
+
def __next__(self):
|
| 325 |
+
self.count += 1
|
| 326 |
+
img0 = self.imgs.copy()
|
| 327 |
+
if cv2.waitKey(1) == ord('q'): # q to quit
|
| 328 |
+
cv2.destroyAllWindows()
|
| 329 |
+
raise StopIteration
|
| 330 |
+
|
| 331 |
+
# Letterbox
|
| 332 |
+
img = [letterbox(x, self.img_size, auto=self.rect, stride=self.stride)[0] for x in img0]
|
| 333 |
+
|
| 334 |
+
# Stack
|
| 335 |
+
img = np.stack(img, 0)
|
| 336 |
+
|
| 337 |
+
# Convert
|
| 338 |
+
img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to bsx3x416x416
|
| 339 |
+
img = np.ascontiguousarray(img)
|
| 340 |
+
|
| 341 |
+
return self.sources, img, img0, None
|
| 342 |
+
|
| 343 |
+
def __len__(self):
|
| 344 |
+
return 0 # 1E12 frames = 32 streams at 30 FPS for 30 years
|
| 345 |
+
|
| 346 |
+
|
| 347 |
+
def img2label_paths(img_paths):
|
| 348 |
+
# Define label paths as a function of image paths
|
| 349 |
+
sa, sb = os.sep + 'images' + os.sep, os.sep + 'labels' + os.sep # /images/, /labels/ substrings
|
| 350 |
+
return ['txt'.join(x.replace(sa, sb, 1).rsplit(x.split('.')[-1], 1)) for x in img_paths]
|
| 351 |
+
|
| 352 |
+
|
| 353 |
+
class LoadImagesAndLabels(Dataset): # for training/testing
|
| 354 |
+
def __init__(self, path, img_size=640, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False,
|
| 355 |
+
cache_images=False, single_cls=False, stride=32, pad=0.0, prefix=''):
|
| 356 |
+
self.img_size = img_size
|
| 357 |
+
self.augment = augment
|
| 358 |
+
self.hyp = hyp
|
| 359 |
+
self.image_weights = image_weights
|
| 360 |
+
self.rect = False if image_weights else rect
|
| 361 |
+
self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
|
| 362 |
+
self.mosaic_border = [-img_size // 2, -img_size // 2]
|
| 363 |
+
self.stride = stride
|
| 364 |
+
self.path = path
|
| 365 |
+
#self.albumentations = Albumentations() if augment else None
|
| 366 |
+
|
| 367 |
+
try:
|
| 368 |
+
f = [] # image files
|
| 369 |
+
for p in path if isinstance(path, list) else [path]:
|
| 370 |
+
p = Path(p) # os-agnostic
|
| 371 |
+
if p.is_dir(): # dir
|
| 372 |
+
f += glob.glob(str(p / '**' / '*.*'), recursive=True)
|
| 373 |
+
# f = list(p.rglob('**/*.*')) # pathlib
|
| 374 |
+
elif p.is_file(): # file
|
| 375 |
+
with open(p, 'r') as t:
|
| 376 |
+
t = t.read().strip().splitlines()
|
| 377 |
+
parent = str(p.parent) + os.sep
|
| 378 |
+
f += [x.replace('./', parent) if x.startswith('./') else x for x in t] # local to global path
|
| 379 |
+
# f += [p.parent / x.lstrip(os.sep) for x in t] # local to global path (pathlib)
|
| 380 |
+
else:
|
| 381 |
+
raise Exception(f'{prefix}{p} does not exist')
|
| 382 |
+
self.img_files = sorted([x.replace('/', os.sep) for x in f if x.split('.')[-1].lower() in img_formats])
|
| 383 |
+
# self.img_files = sorted([x for x in f if x.suffix[1:].lower() in img_formats]) # pathlib
|
| 384 |
+
assert self.img_files, f'{prefix}No images found'
|
| 385 |
+
except Exception as e:
|
| 386 |
+
raise Exception(f'{prefix}Error loading data from {path}: {e}\nSee {help_url}')
|
| 387 |
+
|
| 388 |
+
# Check cache
|
| 389 |
+
self.label_files = img2label_paths(self.img_files) # labels
|
| 390 |
+
cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix('.cache') # cached labels
|
| 391 |
+
if cache_path.is_file():
|
| 392 |
+
cache, exists = torch.load(cache_path), True # load
|
| 393 |
+
#if cache['hash'] != get_hash(self.label_files + self.img_files) or 'version' not in cache: # changed
|
| 394 |
+
# cache, exists = self.cache_labels(cache_path, prefix), False # re-cache
|
| 395 |
+
else:
|
| 396 |
+
cache, exists = self.cache_labels(cache_path, prefix), False # cache
|
| 397 |
+
|
| 398 |
+
# Display cache
|
| 399 |
+
nf, nm, ne, nc, n = cache.pop('results') # found, missing, empty, corrupted, total
|
| 400 |
+
if exists:
|
| 401 |
+
d = f"Scanning '{cache_path}' images and labels... {nf} found, {nm} missing, {ne} empty, {nc} corrupted"
|
| 402 |
+
tqdm(None, desc=prefix + d, total=n, initial=n) # display cache results
|
| 403 |
+
assert nf > 0 or not augment, f'{prefix}No labels in {cache_path}. Can not train without labels. See {help_url}'
|
| 404 |
+
|
| 405 |
+
# Read cache
|
| 406 |
+
cache.pop('hash') # remove hash
|
| 407 |
+
cache.pop('version') # remove version
|
| 408 |
+
labels, shapes, self.segments = zip(*cache.values())
|
| 409 |
+
self.labels = list(labels)
|
| 410 |
+
self.shapes = np.array(shapes, dtype=np.float64)
|
| 411 |
+
self.img_files = list(cache.keys()) # update
|
| 412 |
+
self.label_files = img2label_paths(cache.keys()) # update
|
| 413 |
+
if single_cls:
|
| 414 |
+
for x in self.labels:
|
| 415 |
+
x[:, 0] = 0
|
| 416 |
+
|
| 417 |
+
n = len(shapes) # number of images
|
| 418 |
+
bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
|
| 419 |
+
nb = bi[-1] + 1 # number of batches
|
| 420 |
+
self.batch = bi # batch index of image
|
| 421 |
+
self.n = n
|
| 422 |
+
self.indices = range(n)
|
| 423 |
+
|
| 424 |
+
# Rectangular Training
|
| 425 |
+
if self.rect:
|
| 426 |
+
# Sort by aspect ratio
|
| 427 |
+
s = self.shapes # wh
|
| 428 |
+
ar = s[:, 1] / s[:, 0] # aspect ratio
|
| 429 |
+
irect = ar.argsort()
|
| 430 |
+
self.img_files = [self.img_files[i] for i in irect]
|
| 431 |
+
self.label_files = [self.label_files[i] for i in irect]
|
| 432 |
+
self.labels = [self.labels[i] for i in irect]
|
| 433 |
+
self.shapes = s[irect] # wh
|
| 434 |
+
ar = ar[irect]
|
| 435 |
+
|
| 436 |
+
# Set training image shapes
|
| 437 |
+
shapes = [[1, 1]] * nb
|
| 438 |
+
for i in range(nb):
|
| 439 |
+
ari = ar[bi == i]
|
| 440 |
+
mini, maxi = ari.min(), ari.max()
|
| 441 |
+
if maxi < 1:
|
| 442 |
+
shapes[i] = [maxi, 1]
|
| 443 |
+
elif mini > 1:
|
| 444 |
+
shapes[i] = [1, 1 / mini]
|
| 445 |
+
|
| 446 |
+
self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(np.int) * stride
|
| 447 |
+
|
| 448 |
+
# Cache images into memory for faster training (WARNING: large datasets may exceed system RAM)
|
| 449 |
+
self.imgs = [None] * n
|
| 450 |
+
if cache_images:
|
| 451 |
+
if cache_images == 'disk':
|
| 452 |
+
self.im_cache_dir = Path(Path(self.img_files[0]).parent.as_posix() + '_npy')
|
| 453 |
+
self.img_npy = [self.im_cache_dir / Path(f).with_suffix('.npy').name for f in self.img_files]
|
| 454 |
+
self.im_cache_dir.mkdir(parents=True, exist_ok=True)
|
| 455 |
+
gb = 0 # Gigabytes of cached images
|
| 456 |
+
self.img_hw0, self.img_hw = [None] * n, [None] * n
|
| 457 |
+
results = ThreadPool(8).imap(lambda x: load_image(*x), zip(repeat(self), range(n)))
|
| 458 |
+
pbar = tqdm(enumerate(results), total=n)
|
| 459 |
+
for i, x in pbar:
|
| 460 |
+
if cache_images == 'disk':
|
| 461 |
+
if not self.img_npy[i].exists():
|
| 462 |
+
np.save(self.img_npy[i].as_posix(), x[0])
|
| 463 |
+
gb += self.img_npy[i].stat().st_size
|
| 464 |
+
else:
|
| 465 |
+
self.imgs[i], self.img_hw0[i], self.img_hw[i] = x
|
| 466 |
+
gb += self.imgs[i].nbytes
|
| 467 |
+
pbar.desc = f'{prefix}Caching images ({gb / 1E9:.1f}GB)'
|
| 468 |
+
pbar.close()
|
| 469 |
+
|
| 470 |
+
def cache_labels(self, path=Path('./labels.cache'), prefix=''):
|
| 471 |
+
# Cache dataset labels, check images and read shapes
|
| 472 |
+
x = {} # dict
|
| 473 |
+
nm, nf, ne, nc = 0, 0, 0, 0 # number missing, found, empty, duplicate
|
| 474 |
+
pbar = tqdm(zip(self.img_files, self.label_files), desc='Scanning images', total=len(self.img_files))
|
| 475 |
+
for i, (im_file, lb_file) in enumerate(pbar):
|
| 476 |
+
try:
|
| 477 |
+
# verify images
|
| 478 |
+
im = Image.open(im_file)
|
| 479 |
+
im.verify() # PIL verify
|
| 480 |
+
shape = exif_size(im) # image size
|
| 481 |
+
segments = [] # instance segments
|
| 482 |
+
assert (shape[0] > 9) & (shape[1] > 9), f'image size {shape} <10 pixels'
|
| 483 |
+
assert im.format.lower() in img_formats, f'invalid image format {im.format}'
|
| 484 |
+
|
| 485 |
+
# verify labels
|
| 486 |
+
if os.path.isfile(lb_file):
|
| 487 |
+
nf += 1 # label found
|
| 488 |
+
with open(lb_file, 'r') as f:
|
| 489 |
+
l = [x.split() for x in f.read().strip().splitlines()]
|
| 490 |
+
if any([len(x) > 8 for x in l]): # is segment
|
| 491 |
+
classes = np.array([x[0] for x in l], dtype=np.float32)
|
| 492 |
+
segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in l] # (cls, xy1...)
|
| 493 |
+
l = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
|
| 494 |
+
l = np.array(l, dtype=np.float32)
|
| 495 |
+
if len(l):
|
| 496 |
+
assert l.shape[1] == 5, 'labels require 5 columns each'
|
| 497 |
+
assert (l >= 0).all(), 'negative labels'
|
| 498 |
+
assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels'
|
| 499 |
+
assert np.unique(l, axis=0).shape[0] == l.shape[0], 'duplicate labels'
|
| 500 |
+
else:
|
| 501 |
+
ne += 1 # label empty
|
| 502 |
+
l = np.zeros((0, 5), dtype=np.float32)
|
| 503 |
+
else:
|
| 504 |
+
nm += 1 # label missing
|
| 505 |
+
l = np.zeros((0, 5), dtype=np.float32)
|
| 506 |
+
x[im_file] = [l, shape, segments]
|
| 507 |
+
except Exception as e:
|
| 508 |
+
nc += 1
|
| 509 |
+
print(f'{prefix}WARNING: Ignoring corrupted image and/or label {im_file}: {e}')
|
| 510 |
+
|
| 511 |
+
pbar.desc = f"{prefix}Scanning '{path.parent / path.stem}' images and labels... " \
|
| 512 |
+
f"{nf} found, {nm} missing, {ne} empty, {nc} corrupted"
|
| 513 |
+
pbar.close()
|
| 514 |
+
|
| 515 |
+
if nf == 0:
|
| 516 |
+
print(f'{prefix}WARNING: No labels found in {path}. See {help_url}')
|
| 517 |
+
|
| 518 |
+
x['hash'] = get_hash(self.label_files + self.img_files)
|
| 519 |
+
x['results'] = nf, nm, ne, nc, i + 1
|
| 520 |
+
x['version'] = 0.1 # cache version
|
| 521 |
+
torch.save(x, path) # save for next time
|
| 522 |
+
logging.info(f'{prefix}New cache created: {path}')
|
| 523 |
+
return x
|
| 524 |
+
|
| 525 |
+
def __len__(self):
|
| 526 |
+
return len(self.img_files)
|
| 527 |
+
|
| 528 |
+
# def __iter__(self):
|
| 529 |
+
# self.count = -1
|
| 530 |
+
# print('ran dataset iter')
|
| 531 |
+
# #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
|
| 532 |
+
# return self
|
| 533 |
+
|
| 534 |
+
def __getitem__(self, index):
|
| 535 |
+
index = self.indices[index] # linear, shuffled, or image_weights
|
| 536 |
+
|
| 537 |
+
hyp = self.hyp
|
| 538 |
+
mosaic = self.mosaic and random.random() < hyp['mosaic']
|
| 539 |
+
if mosaic:
|
| 540 |
+
# Load mosaic
|
| 541 |
+
if random.random() < 0.8:
|
| 542 |
+
img, labels = load_mosaic(self, index)
|
| 543 |
+
else:
|
| 544 |
+
img, labels = load_mosaic9(self, index)
|
| 545 |
+
shapes = None
|
| 546 |
+
|
| 547 |
+
# MixUp https://arxiv.org/pdf/1710.09412.pdf
|
| 548 |
+
if random.random() < hyp['mixup']:
|
| 549 |
+
if random.random() < 0.8:
|
| 550 |
+
img2, labels2 = load_mosaic(self, random.randint(0, len(self.labels) - 1))
|
| 551 |
+
else:
|
| 552 |
+
img2, labels2 = load_mosaic9(self, random.randint(0, len(self.labels) - 1))
|
| 553 |
+
r = np.random.beta(8.0, 8.0) # mixup ratio, alpha=beta=8.0
|
| 554 |
+
img = (img * r + img2 * (1 - r)).astype(np.uint8)
|
| 555 |
+
labels = np.concatenate((labels, labels2), 0)
|
| 556 |
+
|
| 557 |
+
else:
|
| 558 |
+
# Load image
|
| 559 |
+
img, (h0, w0), (h, w) = load_image(self, index)
|
| 560 |
+
|
| 561 |
+
# Letterbox
|
| 562 |
+
shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
|
| 563 |
+
img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
|
| 564 |
+
shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
|
| 565 |
+
|
| 566 |
+
labels = self.labels[index].copy()
|
| 567 |
+
if labels.size: # normalized xywh to pixel xyxy format
|
| 568 |
+
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
|
| 569 |
+
|
| 570 |
+
if self.augment:
|
| 571 |
+
# Augment imagespace
|
| 572 |
+
if not mosaic:
|
| 573 |
+
img, labels = random_perspective(img, labels,
|
| 574 |
+
degrees=hyp['degrees'],
|
| 575 |
+
translate=hyp['translate'],
|
| 576 |
+
scale=hyp['scale'],
|
| 577 |
+
shear=hyp['shear'],
|
| 578 |
+
perspective=hyp['perspective'])
|
| 579 |
+
|
| 580 |
+
|
| 581 |
+
#img, labels = self.albumentations(img, labels)
|
| 582 |
+
|
| 583 |
+
# Augment colorspace
|
| 584 |
+
augment_hsv(img, hgain=hyp['hsv_h'], sgain=hyp['hsv_s'], vgain=hyp['hsv_v'])
|
| 585 |
+
|
| 586 |
+
# Apply cutouts
|
| 587 |
+
# if random.random() < 0.9:
|
| 588 |
+
# labels = cutout(img, labels)
|
| 589 |
+
|
| 590 |
+
if random.random() < hyp['paste_in']:
|
| 591 |
+
sample_labels, sample_images, sample_masks = [], [], []
|
| 592 |
+
while len(sample_labels) < 30:
|
| 593 |
+
sample_labels_, sample_images_, sample_masks_ = load_samples(self, random.randint(0, len(self.labels) - 1))
|
| 594 |
+
sample_labels += sample_labels_
|
| 595 |
+
sample_images += sample_images_
|
| 596 |
+
sample_masks += sample_masks_
|
| 597 |
+
#print(len(sample_labels))
|
| 598 |
+
if len(sample_labels) == 0:
|
| 599 |
+
break
|
| 600 |
+
labels = pastein(img, labels, sample_labels, sample_images, sample_masks)
|
| 601 |
+
|
| 602 |
+
nL = len(labels) # number of labels
|
| 603 |
+
if nL:
|
| 604 |
+
labels[:, 1:5] = xyxy2xywh(labels[:, 1:5]) # convert xyxy to xywh
|
| 605 |
+
labels[:, [2, 4]] /= img.shape[0] # normalized height 0-1
|
| 606 |
+
labels[:, [1, 3]] /= img.shape[1] # normalized width 0-1
|
| 607 |
+
|
| 608 |
+
if self.augment:
|
| 609 |
+
# flip up-down
|
| 610 |
+
if random.random() < hyp['flipud']:
|
| 611 |
+
img = np.flipud(img)
|
| 612 |
+
if nL:
|
| 613 |
+
labels[:, 2] = 1 - labels[:, 2]
|
| 614 |
+
|
| 615 |
+
# flip left-right
|
| 616 |
+
if random.random() < hyp['fliplr']:
|
| 617 |
+
img = np.fliplr(img)
|
| 618 |
+
if nL:
|
| 619 |
+
labels[:, 1] = 1 - labels[:, 1]
|
| 620 |
+
|
| 621 |
+
labels_out = torch.zeros((nL, 6))
|
| 622 |
+
if nL:
|
| 623 |
+
labels_out[:, 1:] = torch.from_numpy(labels)
|
| 624 |
+
|
| 625 |
+
# Convert
|
| 626 |
+
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
|
| 627 |
+
img = np.ascontiguousarray(img)
|
| 628 |
+
|
| 629 |
+
return torch.from_numpy(img), labels_out, self.img_files[index], shapes
|
| 630 |
+
|
| 631 |
+
@staticmethod
|
| 632 |
+
def collate_fn(batch):
|
| 633 |
+
img, label, path, shapes = zip(*batch) # transposed
|
| 634 |
+
for i, l in enumerate(label):
|
| 635 |
+
l[:, 0] = i # add target image index for build_targets()
|
| 636 |
+
return torch.stack(img, 0), torch.cat(label, 0), path, shapes
|
| 637 |
+
|
| 638 |
+
@staticmethod
|
| 639 |
+
def collate_fn4(batch):
|
| 640 |
+
img, label, path, shapes = zip(*batch) # transposed
|
| 641 |
+
n = len(shapes) // 4
|
| 642 |
+
img4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
|
| 643 |
+
|
| 644 |
+
ho = torch.tensor([[0., 0, 0, 1, 0, 0]])
|
| 645 |
+
wo = torch.tensor([[0., 0, 1, 0, 0, 0]])
|
| 646 |
+
s = torch.tensor([[1, 1, .5, .5, .5, .5]]) # scale
|
| 647 |
+
for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
|
| 648 |
+
i *= 4
|
| 649 |
+
if random.random() < 0.5:
|
| 650 |
+
im = F.interpolate(img[i].unsqueeze(0).float(), scale_factor=2., mode='bilinear', align_corners=False)[
|
| 651 |
+
0].type(img[i].type())
|
| 652 |
+
l = label[i]
|
| 653 |
+
else:
|
| 654 |
+
im = torch.cat((torch.cat((img[i], img[i + 1]), 1), torch.cat((img[i + 2], img[i + 3]), 1)), 2)
|
| 655 |
+
l = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
|
| 656 |
+
img4.append(im)
|
| 657 |
+
label4.append(l)
|
| 658 |
+
|
| 659 |
+
for i, l in enumerate(label4):
|
| 660 |
+
l[:, 0] = i # add target image index for build_targets()
|
| 661 |
+
|
| 662 |
+
return torch.stack(img4, 0), torch.cat(label4, 0), path4, shapes4
|
| 663 |
+
|
| 664 |
+
|
| 665 |
+
# Ancillary functions --------------------------------------------------------------------------------------------------
|
| 666 |
+
def load_image(self, index):
|
| 667 |
+
# loads 1 image from dataset, returns img, original hw, resized hw
|
| 668 |
+
img = self.imgs[index]
|
| 669 |
+
if img is None: # not cached
|
| 670 |
+
path = self.img_files[index]
|
| 671 |
+
img = cv2.imread(path) # BGR
|
| 672 |
+
assert img is not None, 'Image Not Found ' + path
|
| 673 |
+
h0, w0 = img.shape[:2] # orig hw
|
| 674 |
+
r = self.img_size / max(h0, w0) # resize image to img_size
|
| 675 |
+
if r != 1: # always resize down, only resize up if training with augmentation
|
| 676 |
+
interp = cv2.INTER_AREA if r < 1 and not self.augment else cv2.INTER_LINEAR
|
| 677 |
+
img = cv2.resize(img, (int(w0 * r), int(h0 * r)), interpolation=interp)
|
| 678 |
+
return img, (h0, w0), img.shape[:2] # img, hw_original, hw_resized
|
| 679 |
+
else:
|
| 680 |
+
return self.imgs[index], self.img_hw0[index], self.img_hw[index] # img, hw_original, hw_resized
|
| 681 |
+
|
| 682 |
+
|
| 683 |
+
def augment_hsv(img, hgain=0.5, sgain=0.5, vgain=0.5):
|
| 684 |
+
r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
|
| 685 |
+
hue, sat, val = cv2.split(cv2.cvtColor(img, cv2.COLOR_BGR2HSV))
|
| 686 |
+
dtype = img.dtype # uint8
|
| 687 |
+
|
| 688 |
+
x = np.arange(0, 256, dtype=np.int16)
|
| 689 |
+
lut_hue = ((x * r[0]) % 180).astype(dtype)
|
| 690 |
+
lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
|
| 691 |
+
lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
|
| 692 |
+
|
| 693 |
+
img_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val))).astype(dtype)
|
| 694 |
+
cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img) # no return needed
|
| 695 |
+
|
| 696 |
+
|
| 697 |
+
def hist_equalize(img, clahe=True, bgr=False):
|
| 698 |
+
# Equalize histogram on BGR image 'img' with img.shape(n,m,3) and range 0-255
|
| 699 |
+
yuv = cv2.cvtColor(img, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
|
| 700 |
+
if clahe:
|
| 701 |
+
c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
|
| 702 |
+
yuv[:, :, 0] = c.apply(yuv[:, :, 0])
|
| 703 |
+
else:
|
| 704 |
+
yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
|
| 705 |
+
return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
|
| 706 |
+
|
| 707 |
+
|
| 708 |
+
def load_mosaic(self, index):
|
| 709 |
+
# loads images in a 4-mosaic
|
| 710 |
+
|
| 711 |
+
labels4, segments4 = [], []
|
| 712 |
+
s = self.img_size
|
| 713 |
+
yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
|
| 714 |
+
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
|
| 715 |
+
for i, index in enumerate(indices):
|
| 716 |
+
# Load image
|
| 717 |
+
img, _, (h, w) = load_image(self, index)
|
| 718 |
+
|
| 719 |
+
# place img in img4
|
| 720 |
+
if i == 0: # top left
|
| 721 |
+
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
|
| 722 |
+
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
|
| 723 |
+
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
|
| 724 |
+
elif i == 1: # top right
|
| 725 |
+
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
|
| 726 |
+
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
|
| 727 |
+
elif i == 2: # bottom left
|
| 728 |
+
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
|
| 729 |
+
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
|
| 730 |
+
elif i == 3: # bottom right
|
| 731 |
+
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
|
| 732 |
+
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
|
| 733 |
+
|
| 734 |
+
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
|
| 735 |
+
padw = x1a - x1b
|
| 736 |
+
padh = y1a - y1b
|
| 737 |
+
|
| 738 |
+
# Labels
|
| 739 |
+
labels, segments = self.labels[index].copy(), self.segments[index].copy()
|
| 740 |
+
if labels.size:
|
| 741 |
+
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
|
| 742 |
+
segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
|
| 743 |
+
labels4.append(labels)
|
| 744 |
+
segments4.extend(segments)
|
| 745 |
+
|
| 746 |
+
# Concat/clip labels
|
| 747 |
+
labels4 = np.concatenate(labels4, 0)
|
| 748 |
+
for x in (labels4[:, 1:], *segments4):
|
| 749 |
+
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
|
| 750 |
+
# img4, labels4 = replicate(img4, labels4) # replicate
|
| 751 |
+
|
| 752 |
+
# Augment
|
| 753 |
+
#img4, labels4, segments4 = remove_background(img4, labels4, segments4)
|
| 754 |
+
#sample_segments(img4, labels4, segments4, probability=self.hyp['copy_paste'])
|
| 755 |
+
img4, labels4, segments4 = copy_paste(img4, labels4, segments4, probability=self.hyp['copy_paste'])
|
| 756 |
+
img4, labels4 = random_perspective(img4, labels4, segments4,
|
| 757 |
+
degrees=self.hyp['degrees'],
|
| 758 |
+
translate=self.hyp['translate'],
|
| 759 |
+
scale=self.hyp['scale'],
|
| 760 |
+
shear=self.hyp['shear'],
|
| 761 |
+
perspective=self.hyp['perspective'],
|
| 762 |
+
border=self.mosaic_border) # border to remove
|
| 763 |
+
|
| 764 |
+
return img4, labels4
|
| 765 |
+
|
| 766 |
+
|
| 767 |
+
def load_mosaic9(self, index):
|
| 768 |
+
# loads images in a 9-mosaic
|
| 769 |
+
|
| 770 |
+
labels9, segments9 = [], []
|
| 771 |
+
s = self.img_size
|
| 772 |
+
indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
|
| 773 |
+
for i, index in enumerate(indices):
|
| 774 |
+
# Load image
|
| 775 |
+
img, _, (h, w) = load_image(self, index)
|
| 776 |
+
|
| 777 |
+
# place img in img9
|
| 778 |
+
if i == 0: # center
|
| 779 |
+
img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
|
| 780 |
+
h0, w0 = h, w
|
| 781 |
+
c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
|
| 782 |
+
elif i == 1: # top
|
| 783 |
+
c = s, s - h, s + w, s
|
| 784 |
+
elif i == 2: # top right
|
| 785 |
+
c = s + wp, s - h, s + wp + w, s
|
| 786 |
+
elif i == 3: # right
|
| 787 |
+
c = s + w0, s, s + w0 + w, s + h
|
| 788 |
+
elif i == 4: # bottom right
|
| 789 |
+
c = s + w0, s + hp, s + w0 + w, s + hp + h
|
| 790 |
+
elif i == 5: # bottom
|
| 791 |
+
c = s + w0 - w, s + h0, s + w0, s + h0 + h
|
| 792 |
+
elif i == 6: # bottom left
|
| 793 |
+
c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
|
| 794 |
+
elif i == 7: # left
|
| 795 |
+
c = s - w, s + h0 - h, s, s + h0
|
| 796 |
+
elif i == 8: # top left
|
| 797 |
+
c = s - w, s + h0 - hp - h, s, s + h0 - hp
|
| 798 |
+
|
| 799 |
+
padx, pady = c[:2]
|
| 800 |
+
x1, y1, x2, y2 = [max(x, 0) for x in c] # allocate coords
|
| 801 |
+
|
| 802 |
+
# Labels
|
| 803 |
+
labels, segments = self.labels[index].copy(), self.segments[index].copy()
|
| 804 |
+
if labels.size:
|
| 805 |
+
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
|
| 806 |
+
segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
|
| 807 |
+
labels9.append(labels)
|
| 808 |
+
segments9.extend(segments)
|
| 809 |
+
|
| 810 |
+
# Image
|
| 811 |
+
img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
|
| 812 |
+
hp, wp = h, w # height, width previous
|
| 813 |
+
|
| 814 |
+
# Offset
|
| 815 |
+
yc, xc = [int(random.uniform(0, s)) for _ in self.mosaic_border] # mosaic center x, y
|
| 816 |
+
img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
|
| 817 |
+
|
| 818 |
+
# Concat/clip labels
|
| 819 |
+
labels9 = np.concatenate(labels9, 0)
|
| 820 |
+
labels9[:, [1, 3]] -= xc
|
| 821 |
+
labels9[:, [2, 4]] -= yc
|
| 822 |
+
c = np.array([xc, yc]) # centers
|
| 823 |
+
segments9 = [x - c for x in segments9]
|
| 824 |
+
|
| 825 |
+
for x in (labels9[:, 1:], *segments9):
|
| 826 |
+
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
|
| 827 |
+
# img9, labels9 = replicate(img9, labels9) # replicate
|
| 828 |
+
|
| 829 |
+
# Augment
|
| 830 |
+
#img9, labels9, segments9 = remove_background(img9, labels9, segments9)
|
| 831 |
+
img9, labels9, segments9 = copy_paste(img9, labels9, segments9, probability=self.hyp['copy_paste'])
|
| 832 |
+
img9, labels9 = random_perspective(img9, labels9, segments9,
|
| 833 |
+
degrees=self.hyp['degrees'],
|
| 834 |
+
translate=self.hyp['translate'],
|
| 835 |
+
scale=self.hyp['scale'],
|
| 836 |
+
shear=self.hyp['shear'],
|
| 837 |
+
perspective=self.hyp['perspective'],
|
| 838 |
+
border=self.mosaic_border) # border to remove
|
| 839 |
+
|
| 840 |
+
return img9, labels9
|
| 841 |
+
|
| 842 |
+
|
| 843 |
+
def load_samples(self, index):
|
| 844 |
+
# loads images in a 4-mosaic
|
| 845 |
+
|
| 846 |
+
labels4, segments4 = [], []
|
| 847 |
+
s = self.img_size
|
| 848 |
+
yc, xc = [int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border] # mosaic center x, y
|
| 849 |
+
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
|
| 850 |
+
for i, index in enumerate(indices):
|
| 851 |
+
# Load image
|
| 852 |
+
img, _, (h, w) = load_image(self, index)
|
| 853 |
+
|
| 854 |
+
# place img in img4
|
| 855 |
+
if i == 0: # top left
|
| 856 |
+
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
|
| 857 |
+
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
|
| 858 |
+
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
|
| 859 |
+
elif i == 1: # top right
|
| 860 |
+
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
|
| 861 |
+
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
|
| 862 |
+
elif i == 2: # bottom left
|
| 863 |
+
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
|
| 864 |
+
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
|
| 865 |
+
elif i == 3: # bottom right
|
| 866 |
+
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
|
| 867 |
+
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
|
| 868 |
+
|
| 869 |
+
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
|
| 870 |
+
padw = x1a - x1b
|
| 871 |
+
padh = y1a - y1b
|
| 872 |
+
|
| 873 |
+
# Labels
|
| 874 |
+
labels, segments = self.labels[index].copy(), self.segments[index].copy()
|
| 875 |
+
if labels.size:
|
| 876 |
+
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
|
| 877 |
+
segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
|
| 878 |
+
labels4.append(labels)
|
| 879 |
+
segments4.extend(segments)
|
| 880 |
+
|
| 881 |
+
# Concat/clip labels
|
| 882 |
+
labels4 = np.concatenate(labels4, 0)
|
| 883 |
+
for x in (labels4[:, 1:], *segments4):
|
| 884 |
+
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
|
| 885 |
+
# img4, labels4 = replicate(img4, labels4) # replicate
|
| 886 |
+
|
| 887 |
+
# Augment
|
| 888 |
+
#img4, labels4, segments4 = remove_background(img4, labels4, segments4)
|
| 889 |
+
sample_labels, sample_images, sample_masks = sample_segments(img4, labels4, segments4, probability=0.5)
|
| 890 |
+
|
| 891 |
+
return sample_labels, sample_images, sample_masks
|
| 892 |
+
|
| 893 |
+
|
| 894 |
+
def copy_paste(img, labels, segments, probability=0.5):
|
| 895 |
+
# Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
|
| 896 |
+
n = len(segments)
|
| 897 |
+
if probability and n:
|
| 898 |
+
h, w, c = img.shape # height, width, channels
|
| 899 |
+
im_new = np.zeros(img.shape, np.uint8)
|
| 900 |
+
for j in random.sample(range(n), k=round(probability * n)):
|
| 901 |
+
l, s = labels[j], segments[j]
|
| 902 |
+
box = w - l[3], l[2], w - l[1], l[4]
|
| 903 |
+
ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
|
| 904 |
+
if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
|
| 905 |
+
labels = np.concatenate((labels, [[l[0], *box]]), 0)
|
| 906 |
+
segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
|
| 907 |
+
cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
|
| 908 |
+
|
| 909 |
+
result = cv2.bitwise_and(src1=img, src2=im_new)
|
| 910 |
+
result = cv2.flip(result, 1) # augment segments (flip left-right)
|
| 911 |
+
i = result > 0 # pixels to replace
|
| 912 |
+
# i[:, :] = result.max(2).reshape(h, w, 1) # act over ch
|
| 913 |
+
img[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
|
| 914 |
+
|
| 915 |
+
return img, labels, segments
|
| 916 |
+
|
| 917 |
+
|
| 918 |
+
def remove_background(img, labels, segments):
|
| 919 |
+
# Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
|
| 920 |
+
n = len(segments)
|
| 921 |
+
h, w, c = img.shape # height, width, channels
|
| 922 |
+
im_new = np.zeros(img.shape, np.uint8)
|
| 923 |
+
img_new = np.ones(img.shape, np.uint8) * 114
|
| 924 |
+
for j in range(n):
|
| 925 |
+
cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
|
| 926 |
+
|
| 927 |
+
result = cv2.bitwise_and(src1=img, src2=im_new)
|
| 928 |
+
|
| 929 |
+
i = result > 0 # pixels to replace
|
| 930 |
+
img_new[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
|
| 931 |
+
|
| 932 |
+
return img_new, labels, segments
|
| 933 |
+
|
| 934 |
+
|
| 935 |
+
def sample_segments(img, labels, segments, probability=0.5):
|
| 936 |
+
# Implement Copy-Paste augmentation https://arxiv.org/abs/2012.07177, labels as nx5 np.array(cls, xyxy)
|
| 937 |
+
n = len(segments)
|
| 938 |
+
sample_labels = []
|
| 939 |
+
sample_images = []
|
| 940 |
+
sample_masks = []
|
| 941 |
+
if probability and n:
|
| 942 |
+
h, w, c = img.shape # height, width, channels
|
| 943 |
+
for j in random.sample(range(n), k=round(probability * n)):
|
| 944 |
+
l, s = labels[j], segments[j]
|
| 945 |
+
box = l[1].astype(int).clip(0,w-1), l[2].astype(int).clip(0,h-1), l[3].astype(int).clip(0,w-1), l[4].astype(int).clip(0,h-1)
|
| 946 |
+
|
| 947 |
+
#print(box)
|
| 948 |
+
if (box[2] <= box[0]) or (box[3] <= box[1]):
|
| 949 |
+
continue
|
| 950 |
+
|
| 951 |
+
sample_labels.append(l[0])
|
| 952 |
+
|
| 953 |
+
mask = np.zeros(img.shape, np.uint8)
|
| 954 |
+
|
| 955 |
+
cv2.drawContours(mask, [segments[j].astype(np.int32)], -1, (255, 255, 255), cv2.FILLED)
|
| 956 |
+
sample_masks.append(mask[box[1]:box[3],box[0]:box[2],:])
|
| 957 |
+
|
| 958 |
+
result = cv2.bitwise_and(src1=img, src2=mask)
|
| 959 |
+
i = result > 0 # pixels to replace
|
| 960 |
+
mask[i] = result[i] # cv2.imwrite('debug.jpg', img) # debug
|
| 961 |
+
#print(box)
|
| 962 |
+
sample_images.append(mask[box[1]:box[3],box[0]:box[2],:])
|
| 963 |
+
|
| 964 |
+
return sample_labels, sample_images, sample_masks
|
| 965 |
+
|
| 966 |
+
|
| 967 |
+
def replicate(img, labels):
|
| 968 |
+
# Replicate labels
|
| 969 |
+
h, w = img.shape[:2]
|
| 970 |
+
boxes = labels[:, 1:].astype(int)
|
| 971 |
+
x1, y1, x2, y2 = boxes.T
|
| 972 |
+
s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
|
| 973 |
+
for i in s.argsort()[:round(s.size * 0.5)]: # smallest indices
|
| 974 |
+
x1b, y1b, x2b, y2b = boxes[i]
|
| 975 |
+
bh, bw = y2b - y1b, x2b - x1b
|
| 976 |
+
yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
|
| 977 |
+
x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
|
| 978 |
+
img[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
|
| 979 |
+
labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
|
| 980 |
+
|
| 981 |
+
return img, labels
|
| 982 |
+
|
| 983 |
+
|
| 984 |
+
def letterbox(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
|
| 985 |
+
# Resize and pad image while meeting stride-multiple constraints
|
| 986 |
+
shape = img.shape[:2] # current shape [height, width]
|
| 987 |
+
if isinstance(new_shape, int):
|
| 988 |
+
new_shape = (new_shape, new_shape)
|
| 989 |
+
|
| 990 |
+
# Scale ratio (new / old)
|
| 991 |
+
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
|
| 992 |
+
if not scaleup: # only scale down, do not scale up (for better test mAP)
|
| 993 |
+
r = min(r, 1.0)
|
| 994 |
+
|
| 995 |
+
# Compute padding
|
| 996 |
+
ratio = r, r # width, height ratios
|
| 997 |
+
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
|
| 998 |
+
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
|
| 999 |
+
if auto: # minimum rectangle
|
| 1000 |
+
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
|
| 1001 |
+
elif scaleFill: # stretch
|
| 1002 |
+
dw, dh = 0.0, 0.0
|
| 1003 |
+
new_unpad = (new_shape[1], new_shape[0])
|
| 1004 |
+
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
|
| 1005 |
+
|
| 1006 |
+
dw /= 2 # divide padding into 2 sides
|
| 1007 |
+
dh /= 2
|
| 1008 |
+
|
| 1009 |
+
if shape[::-1] != new_unpad: # resize
|
| 1010 |
+
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
|
| 1011 |
+
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
|
| 1012 |
+
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
|
| 1013 |
+
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
|
| 1014 |
+
return img, ratio, (dw, dh)
|
| 1015 |
+
|
| 1016 |
+
|
| 1017 |
+
def random_perspective(img, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
|
| 1018 |
+
border=(0, 0)):
|
| 1019 |
+
# torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
|
| 1020 |
+
# targets = [cls, xyxy]
|
| 1021 |
+
|
| 1022 |
+
height = img.shape[0] + border[0] * 2 # shape(h,w,c)
|
| 1023 |
+
width = img.shape[1] + border[1] * 2
|
| 1024 |
+
|
| 1025 |
+
# Center
|
| 1026 |
+
C = np.eye(3)
|
| 1027 |
+
C[0, 2] = -img.shape[1] / 2 # x translation (pixels)
|
| 1028 |
+
C[1, 2] = -img.shape[0] / 2 # y translation (pixels)
|
| 1029 |
+
|
| 1030 |
+
# Perspective
|
| 1031 |
+
P = np.eye(3)
|
| 1032 |
+
P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
|
| 1033 |
+
P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
|
| 1034 |
+
|
| 1035 |
+
# Rotation and Scale
|
| 1036 |
+
R = np.eye(3)
|
| 1037 |
+
a = random.uniform(-degrees, degrees)
|
| 1038 |
+
# a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
|
| 1039 |
+
s = random.uniform(1 - scale, 1.1 + scale)
|
| 1040 |
+
# s = 2 ** random.uniform(-scale, scale)
|
| 1041 |
+
R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
|
| 1042 |
+
|
| 1043 |
+
# Shear
|
| 1044 |
+
S = np.eye(3)
|
| 1045 |
+
S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
|
| 1046 |
+
S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
|
| 1047 |
+
|
| 1048 |
+
# Translation
|
| 1049 |
+
T = np.eye(3)
|
| 1050 |
+
T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
|
| 1051 |
+
T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
|
| 1052 |
+
|
| 1053 |
+
# Combined rotation matrix
|
| 1054 |
+
M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
|
| 1055 |
+
if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
|
| 1056 |
+
if perspective:
|
| 1057 |
+
img = cv2.warpPerspective(img, M, dsize=(width, height), borderValue=(114, 114, 114))
|
| 1058 |
+
else: # affine
|
| 1059 |
+
img = cv2.warpAffine(img, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
|
| 1060 |
+
|
| 1061 |
+
# Visualize
|
| 1062 |
+
# import matplotlib.pyplot as plt
|
| 1063 |
+
# ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
|
| 1064 |
+
# ax[0].imshow(img[:, :, ::-1]) # base
|
| 1065 |
+
# ax[1].imshow(img2[:, :, ::-1]) # warped
|
| 1066 |
+
|
| 1067 |
+
# Transform label coordinates
|
| 1068 |
+
n = len(targets)
|
| 1069 |
+
if n:
|
| 1070 |
+
use_segments = any(x.any() for x in segments)
|
| 1071 |
+
new = np.zeros((n, 4))
|
| 1072 |
+
if use_segments: # warp segments
|
| 1073 |
+
segments = resample_segments(segments) # upsample
|
| 1074 |
+
for i, segment in enumerate(segments):
|
| 1075 |
+
xy = np.ones((len(segment), 3))
|
| 1076 |
+
xy[:, :2] = segment
|
| 1077 |
+
xy = xy @ M.T # transform
|
| 1078 |
+
xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
|
| 1079 |
+
|
| 1080 |
+
# clip
|
| 1081 |
+
new[i] = segment2box(xy, width, height)
|
| 1082 |
+
|
| 1083 |
+
else: # warp boxes
|
| 1084 |
+
xy = np.ones((n * 4, 3))
|
| 1085 |
+
xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
|
| 1086 |
+
xy = xy @ M.T # transform
|
| 1087 |
+
xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
|
| 1088 |
+
|
| 1089 |
+
# create new boxes
|
| 1090 |
+
x = xy[:, [0, 2, 4, 6]]
|
| 1091 |
+
y = xy[:, [1, 3, 5, 7]]
|
| 1092 |
+
new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
|
| 1093 |
+
|
| 1094 |
+
# clip
|
| 1095 |
+
new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
|
| 1096 |
+
new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
|
| 1097 |
+
|
| 1098 |
+
# filter candidates
|
| 1099 |
+
i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
|
| 1100 |
+
targets = targets[i]
|
| 1101 |
+
targets[:, 1:5] = new[i]
|
| 1102 |
+
|
| 1103 |
+
return img, targets
|
| 1104 |
+
|
| 1105 |
+
|
| 1106 |
+
def box_candidates(box1, box2, wh_thr=2, ar_thr=20, area_thr=0.1, eps=1e-16): # box1(4,n), box2(4,n)
|
| 1107 |
+
# Compute candidate boxes: box1 before augment, box2 after augment, wh_thr (pixels), aspect_ratio_thr, area_ratio
|
| 1108 |
+
w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
|
| 1109 |
+
w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
|
| 1110 |
+
ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
|
| 1111 |
+
return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
|
| 1112 |
+
|
| 1113 |
+
|
| 1114 |
+
def bbox_ioa(box1, box2):
|
| 1115 |
+
# Returns the intersection over box2 area given box1, box2. box1 is 4, box2 is nx4. boxes are x1y1x2y2
|
| 1116 |
+
box2 = box2.transpose()
|
| 1117 |
+
|
| 1118 |
+
# Get the coordinates of bounding boxes
|
| 1119 |
+
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
|
| 1120 |
+
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
|
| 1121 |
+
|
| 1122 |
+
# Intersection area
|
| 1123 |
+
inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \
|
| 1124 |
+
(np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)
|
| 1125 |
+
|
| 1126 |
+
# box2 area
|
| 1127 |
+
box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + 1e-16
|
| 1128 |
+
|
| 1129 |
+
# Intersection over box2 area
|
| 1130 |
+
return inter_area / box2_area
|
| 1131 |
+
|
| 1132 |
+
|
| 1133 |
+
def cutout(image, labels):
|
| 1134 |
+
# Applies image cutout augmentation https://arxiv.org/abs/1708.04552
|
| 1135 |
+
h, w = image.shape[:2]
|
| 1136 |
+
|
| 1137 |
+
# create random masks
|
| 1138 |
+
scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
|
| 1139 |
+
for s in scales:
|
| 1140 |
+
mask_h = random.randint(1, int(h * s))
|
| 1141 |
+
mask_w = random.randint(1, int(w * s))
|
| 1142 |
+
|
| 1143 |
+
# box
|
| 1144 |
+
xmin = max(0, random.randint(0, w) - mask_w // 2)
|
| 1145 |
+
ymin = max(0, random.randint(0, h) - mask_h // 2)
|
| 1146 |
+
xmax = min(w, xmin + mask_w)
|
| 1147 |
+
ymax = min(h, ymin + mask_h)
|
| 1148 |
+
|
| 1149 |
+
# apply random color mask
|
| 1150 |
+
image[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
|
| 1151 |
+
|
| 1152 |
+
# return unobscured labels
|
| 1153 |
+
if len(labels) and s > 0.03:
|
| 1154 |
+
box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
|
| 1155 |
+
ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
|
| 1156 |
+
labels = labels[ioa < 0.60] # remove >60% obscured labels
|
| 1157 |
+
|
| 1158 |
+
return labels
|
| 1159 |
+
|
| 1160 |
+
|
| 1161 |
+
def pastein(image, labels, sample_labels, sample_images, sample_masks):
|
| 1162 |
+
# Applies image cutout augmentation https://arxiv.org/abs/1708.04552
|
| 1163 |
+
h, w = image.shape[:2]
|
| 1164 |
+
|
| 1165 |
+
# create random masks
|
| 1166 |
+
scales = [0.75] * 2 + [0.5] * 4 + [0.25] * 4 + [0.125] * 4 + [0.0625] * 6 # image size fraction
|
| 1167 |
+
for s in scales:
|
| 1168 |
+
if random.random() < 0.2:
|
| 1169 |
+
continue
|
| 1170 |
+
mask_h = random.randint(1, int(h * s))
|
| 1171 |
+
mask_w = random.randint(1, int(w * s))
|
| 1172 |
+
|
| 1173 |
+
# box
|
| 1174 |
+
xmin = max(0, random.randint(0, w) - mask_w // 2)
|
| 1175 |
+
ymin = max(0, random.randint(0, h) - mask_h // 2)
|
| 1176 |
+
xmax = min(w, xmin + mask_w)
|
| 1177 |
+
ymax = min(h, ymin + mask_h)
|
| 1178 |
+
|
| 1179 |
+
box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
|
| 1180 |
+
if len(labels):
|
| 1181 |
+
ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
|
| 1182 |
+
else:
|
| 1183 |
+
ioa = np.zeros(1)
|
| 1184 |
+
|
| 1185 |
+
if (ioa < 0.30).all() and len(sample_labels) and (xmax > xmin+20) and (ymax > ymin+20): # allow 30% obscuration of existing labels
|
| 1186 |
+
sel_ind = random.randint(0, len(sample_labels)-1)
|
| 1187 |
+
#print(len(sample_labels))
|
| 1188 |
+
#print(sel_ind)
|
| 1189 |
+
#print((xmax-xmin, ymax-ymin))
|
| 1190 |
+
#print(image[ymin:ymax, xmin:xmax].shape)
|
| 1191 |
+
#print([[sample_labels[sel_ind], *box]])
|
| 1192 |
+
#print(labels.shape)
|
| 1193 |
+
hs, ws, cs = sample_images[sel_ind].shape
|
| 1194 |
+
r_scale = min((ymax-ymin)/hs, (xmax-xmin)/ws)
|
| 1195 |
+
r_w = int(ws*r_scale)
|
| 1196 |
+
r_h = int(hs*r_scale)
|
| 1197 |
+
|
| 1198 |
+
if (r_w > 10) and (r_h > 10):
|
| 1199 |
+
r_mask = cv2.resize(sample_masks[sel_ind], (r_w, r_h))
|
| 1200 |
+
r_image = cv2.resize(sample_images[sel_ind], (r_w, r_h))
|
| 1201 |
+
temp_crop = image[ymin:ymin+r_h, xmin:xmin+r_w]
|
| 1202 |
+
m_ind = r_mask > 0
|
| 1203 |
+
if m_ind.astype(np.int).sum() > 60:
|
| 1204 |
+
temp_crop[m_ind] = r_image[m_ind]
|
| 1205 |
+
#print(sample_labels[sel_ind])
|
| 1206 |
+
#print(sample_images[sel_ind].shape)
|
| 1207 |
+
#print(temp_crop.shape)
|
| 1208 |
+
box = np.array([xmin, ymin, xmin+r_w, ymin+r_h], dtype=np.float32)
|
| 1209 |
+
if len(labels):
|
| 1210 |
+
labels = np.concatenate((labels, [[sample_labels[sel_ind], *box]]), 0)
|
| 1211 |
+
else:
|
| 1212 |
+
labels = np.array([[sample_labels[sel_ind], *box]])
|
| 1213 |
+
|
| 1214 |
+
image[ymin:ymin+r_h, xmin:xmin+r_w] = temp_crop
|
| 1215 |
+
|
| 1216 |
+
return labels
|
| 1217 |
+
|
| 1218 |
+
class Albumentations:
|
| 1219 |
+
# YOLOv5 Albumentations class (optional, only used if package is installed)
|
| 1220 |
+
def __init__(self):
|
| 1221 |
+
self.transform = None
|
| 1222 |
+
import albumentations as A
|
| 1223 |
+
|
| 1224 |
+
self.transform = A.Compose([
|
| 1225 |
+
A.CLAHE(p=0.01),
|
| 1226 |
+
A.RandomBrightnessContrast(brightness_limit=0.2, contrast_limit=0.2, p=0.01),
|
| 1227 |
+
A.RandomGamma(gamma_limit=[80, 120], p=0.01),
|
| 1228 |
+
A.Blur(p=0.01),
|
| 1229 |
+
A.MedianBlur(p=0.01),
|
| 1230 |
+
A.ToGray(p=0.01),
|
| 1231 |
+
A.ImageCompression(quality_lower=75, p=0.01),],
|
| 1232 |
+
bbox_params=A.BboxParams(format='pascal_voc', label_fields=['class_labels']))
|
| 1233 |
+
|
| 1234 |
+
#logging.info(colorstr('albumentations: ') + ', '.join(f'{x}' for x in self.transform.transforms if x.p))
|
| 1235 |
+
|
| 1236 |
+
def __call__(self, im, labels, p=1.0):
|
| 1237 |
+
if self.transform and random.random() < p:
|
| 1238 |
+
new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
|
| 1239 |
+
im, labels = new['image'], np.array([[c, *b] for c, b in zip(new['class_labels'], new['bboxes'])])
|
| 1240 |
+
return im, labels
|
| 1241 |
+
|
| 1242 |
+
|
| 1243 |
+
def create_folder(path='./new'):
|
| 1244 |
+
# Create folder
|
| 1245 |
+
if os.path.exists(path):
|
| 1246 |
+
shutil.rmtree(path) # delete output folder
|
| 1247 |
+
os.makedirs(path) # make new output folder
|
| 1248 |
+
|
| 1249 |
+
|
| 1250 |
+
def flatten_recursive(path='../coco'):
|
| 1251 |
+
# Flatten a recursive directory by bringing all files to top level
|
| 1252 |
+
new_path = Path(path + '_flat')
|
| 1253 |
+
create_folder(new_path)
|
| 1254 |
+
for file in tqdm(glob.glob(str(Path(path)) + '/**/*.*', recursive=True)):
|
| 1255 |
+
shutil.copyfile(file, new_path / Path(file).name)
|
| 1256 |
+
|
| 1257 |
+
|
| 1258 |
+
def extract_boxes(path='../coco/'): # from utils.datasets import *; extract_boxes('../coco128')
|
| 1259 |
+
# Convert detection dataset into classification dataset, with one directory per class
|
| 1260 |
+
|
| 1261 |
+
path = Path(path) # images dir
|
| 1262 |
+
shutil.rmtree(path / 'classifier') if (path / 'classifier').is_dir() else None # remove existing
|
| 1263 |
+
files = list(path.rglob('*.*'))
|
| 1264 |
+
n = len(files) # number of files
|
| 1265 |
+
for im_file in tqdm(files, total=n):
|
| 1266 |
+
if im_file.suffix[1:] in img_formats:
|
| 1267 |
+
# image
|
| 1268 |
+
im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
|
| 1269 |
+
h, w = im.shape[:2]
|
| 1270 |
+
|
| 1271 |
+
# labels
|
| 1272 |
+
lb_file = Path(img2label_paths([str(im_file)])[0])
|
| 1273 |
+
if Path(lb_file).exists():
|
| 1274 |
+
with open(lb_file, 'r') as f:
|
| 1275 |
+
lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
|
| 1276 |
+
|
| 1277 |
+
for j, x in enumerate(lb):
|
| 1278 |
+
c = int(x[0]) # class
|
| 1279 |
+
f = (path / 'classifier') / f'{c}' / f'{path.stem}_{im_file.stem}_{j}.jpg' # new filename
|
| 1280 |
+
if not f.parent.is_dir():
|
| 1281 |
+
f.parent.mkdir(parents=True)
|
| 1282 |
+
|
| 1283 |
+
b = x[1:] * [w, h, w, h] # box
|
| 1284 |
+
# b[2:] = b[2:].max() # rectangle to square
|
| 1285 |
+
b[2:] = b[2:] * 1.2 + 3 # pad
|
| 1286 |
+
b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(np.int)
|
| 1287 |
+
|
| 1288 |
+
b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
|
| 1289 |
+
b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
|
| 1290 |
+
assert cv2.imwrite(str(f), im[b[1]:b[3], b[0]:b[2]]), f'box failure in {f}'
|
| 1291 |
+
|
| 1292 |
+
|
| 1293 |
+
def autosplit(path='../coco', weights=(0.9, 0.1, 0.0), annotated_only=False):
|
| 1294 |
+
""" Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
|
| 1295 |
+
Usage: from utils.datasets import *; autosplit('../coco')
|
| 1296 |
+
Arguments
|
| 1297 |
+
path: Path to images directory
|
| 1298 |
+
weights: Train, val, test weights (list)
|
| 1299 |
+
annotated_only: Only use images with an annotated txt file
|
| 1300 |
+
"""
|
| 1301 |
+
path = Path(path) # images dir
|
| 1302 |
+
files = sum([list(path.rglob(f"*.{img_ext}")) for img_ext in img_formats], []) # image files only
|
| 1303 |
+
n = len(files) # number of files
|
| 1304 |
+
indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
|
| 1305 |
+
|
| 1306 |
+
txt = ['autosplit_train.txt', 'autosplit_val.txt', 'autosplit_test.txt'] # 3 txt files
|
| 1307 |
+
[(path / x).unlink() for x in txt if (path / x).exists()] # remove existing
|
| 1308 |
+
|
| 1309 |
+
print(f'Autosplitting images from {path}' + ', using *.txt labeled images only' * annotated_only)
|
| 1310 |
+
for i, img in tqdm(zip(indices, files), total=n):
|
| 1311 |
+
if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
|
| 1312 |
+
with open(path / txt[i], 'a') as f:
|
| 1313 |
+
f.write(str(img) + '\n') # add image to txt file
|
| 1314 |
+
|
| 1315 |
+
|
| 1316 |
+
def load_segmentations(self, index):
|
| 1317 |
+
key = '/work/handsomejw66/coco17/' + self.img_files[index]
|
| 1318 |
+
#print(key)
|
| 1319 |
+
# /work/handsomejw66/coco17/
|
| 1320 |
+
return self.segs[key]
|
utils/general.py
ADDED
|
@@ -0,0 +1,790 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# YOLOR general utils
|
| 2 |
+
|
| 3 |
+
import glob
|
| 4 |
+
import logging
|
| 5 |
+
import math
|
| 6 |
+
import os
|
| 7 |
+
import platform
|
| 8 |
+
import random
|
| 9 |
+
import re
|
| 10 |
+
import subprocess
|
| 11 |
+
import time
|
| 12 |
+
from pathlib import Path
|
| 13 |
+
|
| 14 |
+
import cv2
|
| 15 |
+
import numpy as np
|
| 16 |
+
import pandas as pd
|
| 17 |
+
import torch
|
| 18 |
+
import torchvision
|
| 19 |
+
import yaml
|
| 20 |
+
|
| 21 |
+
from utils.google_utils import gsutil_getsize
|
| 22 |
+
from utils.metrics import fitness
|
| 23 |
+
from utils.torch_utils import init_torch_seeds
|
| 24 |
+
|
| 25 |
+
# Settings
|
| 26 |
+
torch.set_printoptions(linewidth=320, precision=5, profile='long')
|
| 27 |
+
np.set_printoptions(linewidth=320, formatter={'float_kind': '{:11.5g}'.format}) # format short g, %precision=5
|
| 28 |
+
pd.options.display.max_columns = 10
|
| 29 |
+
cv2.setNumThreads(0) # prevent OpenCV from multithreading (incompatible with PyTorch DataLoader)
|
| 30 |
+
os.environ['NUMEXPR_MAX_THREADS'] = str(min(os.cpu_count(), 8)) # NumExpr max threads
|
| 31 |
+
|
| 32 |
+
|
| 33 |
+
def set_logging(rank=-1):
|
| 34 |
+
logging.basicConfig(
|
| 35 |
+
format="%(message)s",
|
| 36 |
+
level=logging.INFO if rank in [-1, 0] else logging.WARN)
|
| 37 |
+
|
| 38 |
+
|
| 39 |
+
def init_seeds(seed=0):
|
| 40 |
+
# Initialize random number generator (RNG) seeds
|
| 41 |
+
random.seed(seed)
|
| 42 |
+
np.random.seed(seed)
|
| 43 |
+
init_torch_seeds(seed)
|
| 44 |
+
|
| 45 |
+
|
| 46 |
+
def get_latest_run(search_dir='.'):
|
| 47 |
+
# Return path to most recent 'last.pt' in /runs (i.e. to --resume from)
|
| 48 |
+
last_list = glob.glob(f'{search_dir}/**/last*.pt', recursive=True)
|
| 49 |
+
return max(last_list, key=os.path.getctime) if last_list else ''
|
| 50 |
+
|
| 51 |
+
|
| 52 |
+
def isdocker():
|
| 53 |
+
# Is environment a Docker container
|
| 54 |
+
return Path('/workspace').exists() # or Path('/.dockerenv').exists()
|
| 55 |
+
|
| 56 |
+
|
| 57 |
+
def emojis(str=''):
|
| 58 |
+
# Return platform-dependent emoji-safe version of string
|
| 59 |
+
return str.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else str
|
| 60 |
+
|
| 61 |
+
|
| 62 |
+
def check_online():
|
| 63 |
+
# Check internet connectivity
|
| 64 |
+
import socket
|
| 65 |
+
try:
|
| 66 |
+
socket.create_connection(("1.1.1.1", 443), 5) # check host accesability
|
| 67 |
+
return True
|
| 68 |
+
except OSError:
|
| 69 |
+
return False
|
| 70 |
+
|
| 71 |
+
|
| 72 |
+
def check_git_status():
|
| 73 |
+
# Recommend 'git pull' if code is out of date
|
| 74 |
+
print(colorstr('github: '), end='')
|
| 75 |
+
try:
|
| 76 |
+
assert Path('.git').exists(), 'skipping check (not a git repository)'
|
| 77 |
+
assert not isdocker(), 'skipping check (Docker image)'
|
| 78 |
+
assert check_online(), 'skipping check (offline)'
|
| 79 |
+
|
| 80 |
+
cmd = 'git fetch && git config --get remote.origin.url'
|
| 81 |
+
url = subprocess.check_output(cmd, shell=True).decode().strip().rstrip('.git') # github repo url
|
| 82 |
+
branch = subprocess.check_output('git rev-parse --abbrev-ref HEAD', shell=True).decode().strip() # checked out
|
| 83 |
+
n = int(subprocess.check_output(f'git rev-list {branch}..origin/master --count', shell=True)) # commits behind
|
| 84 |
+
if n > 0:
|
| 85 |
+
s = f"⚠️ WARNING: code is out of date by {n} commit{'s' * (n > 1)}. " \
|
| 86 |
+
f"Use 'git pull' to update or 'git clone {url}' to download latest."
|
| 87 |
+
else:
|
| 88 |
+
s = f'up to date with {url} ✅'
|
| 89 |
+
print(emojis(s)) # emoji-safe
|
| 90 |
+
except Exception as e:
|
| 91 |
+
print(e)
|
| 92 |
+
|
| 93 |
+
|
| 94 |
+
def check_requirements(requirements='requirements.txt', exclude=()):
|
| 95 |
+
# Check installed dependencies meet requirements (pass *.txt file or list of packages)
|
| 96 |
+
import pkg_resources as pkg
|
| 97 |
+
prefix = colorstr('red', 'bold', 'requirements:')
|
| 98 |
+
if isinstance(requirements, (str, Path)): # requirements.txt file
|
| 99 |
+
file = Path(requirements)
|
| 100 |
+
if not file.exists():
|
| 101 |
+
print(f"{prefix} {file.resolve()} not found, check failed.")
|
| 102 |
+
return
|
| 103 |
+
requirements = [f'{x.name}{x.specifier}' for x in pkg.parse_requirements(file.open()) if x.name not in exclude]
|
| 104 |
+
else: # list or tuple of packages
|
| 105 |
+
requirements = [x for x in requirements if x not in exclude]
|
| 106 |
+
|
| 107 |
+
n = 0 # number of packages updates
|
| 108 |
+
for r in requirements:
|
| 109 |
+
try:
|
| 110 |
+
pkg.require(r)
|
| 111 |
+
except Exception as e: # DistributionNotFound or VersionConflict if requirements not met
|
| 112 |
+
n += 1
|
| 113 |
+
print(f"{prefix} {e.req} not found and is required by YOLOR, attempting auto-update...")
|
| 114 |
+
print(subprocess.check_output(f"pip install '{e.req}'", shell=True).decode())
|
| 115 |
+
|
| 116 |
+
if n: # if packages updated
|
| 117 |
+
source = file.resolve() if 'file' in locals() else requirements
|
| 118 |
+
s = f"{prefix} {n} package{'s' * (n > 1)} updated per {source}\n" \
|
| 119 |
+
f"{prefix} ⚠️ {colorstr('bold', 'Restart runtime or rerun command for updates to take effect')}\n"
|
| 120 |
+
print(emojis(s)) # emoji-safe
|
| 121 |
+
|
| 122 |
+
|
| 123 |
+
def check_img_size(img_size, s=32):
|
| 124 |
+
# Verify img_size is a multiple of stride s
|
| 125 |
+
new_size = make_divisible(img_size, int(s)) # ceil gs-multiple
|
| 126 |
+
if new_size != img_size:
|
| 127 |
+
print('WARNING: --img-size %g must be multiple of max stride %g, updating to %g' % (img_size, s, new_size))
|
| 128 |
+
return new_size
|
| 129 |
+
|
| 130 |
+
|
| 131 |
+
def check_imshow():
|
| 132 |
+
# Check if environment supports image displays
|
| 133 |
+
try:
|
| 134 |
+
assert not isdocker(), 'cv2.imshow() is disabled in Docker environments'
|
| 135 |
+
cv2.imshow('test', np.zeros((1, 1, 3)))
|
| 136 |
+
cv2.waitKey(1)
|
| 137 |
+
cv2.destroyAllWindows()
|
| 138 |
+
cv2.waitKey(1)
|
| 139 |
+
return True
|
| 140 |
+
except Exception as e:
|
| 141 |
+
print(f'WARNING: Environment does not support cv2.imshow() or PIL Image.show() image displays\n{e}')
|
| 142 |
+
return False
|
| 143 |
+
|
| 144 |
+
|
| 145 |
+
def check_file(file):
|
| 146 |
+
# Search for file if not found
|
| 147 |
+
if Path(file).is_file() or file == '':
|
| 148 |
+
return file
|
| 149 |
+
else:
|
| 150 |
+
files = glob.glob('./**/' + file, recursive=True) # find file
|
| 151 |
+
assert len(files), f'File Not Found: {file}' # assert file was found
|
| 152 |
+
assert len(files) == 1, f"Multiple files match '{file}', specify exact path: {files}" # assert unique
|
| 153 |
+
return files[0] # return file
|
| 154 |
+
|
| 155 |
+
|
| 156 |
+
def check_dataset(dict):
|
| 157 |
+
# Download dataset if not found locally
|
| 158 |
+
val, s = dict.get('val'), dict.get('download')
|
| 159 |
+
if val and len(val):
|
| 160 |
+
val = [Path(x).resolve() for x in (val if isinstance(val, list) else [val])] # val path
|
| 161 |
+
if not all(x.exists() for x in val):
|
| 162 |
+
print('\nWARNING: Dataset not found, nonexistent paths: %s' % [str(x) for x in val if not x.exists()])
|
| 163 |
+
if s and len(s): # download script
|
| 164 |
+
print('Downloading %s ...' % s)
|
| 165 |
+
if s.startswith('http') and s.endswith('.zip'): # URL
|
| 166 |
+
f = Path(s).name # filename
|
| 167 |
+
torch.hub.download_url_to_file(s, f)
|
| 168 |
+
r = os.system('unzip -q %s -d ../ && rm %s' % (f, f)) # unzip
|
| 169 |
+
else: # bash script
|
| 170 |
+
r = os.system(s)
|
| 171 |
+
print('Dataset autodownload %s\n' % ('success' if r == 0 else 'failure')) # analyze return value
|
| 172 |
+
else:
|
| 173 |
+
raise Exception('Dataset not found.')
|
| 174 |
+
|
| 175 |
+
|
| 176 |
+
def make_divisible(x, divisor):
|
| 177 |
+
# Returns x evenly divisible by divisor
|
| 178 |
+
return math.ceil(x / divisor) * divisor
|
| 179 |
+
|
| 180 |
+
|
| 181 |
+
def clean_str(s):
|
| 182 |
+
# Cleans a string by replacing special characters with underscore _
|
| 183 |
+
return re.sub(pattern="[|@#!¡·$€%&()=?¿^*;:,¨´><+]", repl="_", string=s)
|
| 184 |
+
|
| 185 |
+
|
| 186 |
+
def one_cycle(y1=0.0, y2=1.0, steps=100):
|
| 187 |
+
# lambda function for sinusoidal ramp from y1 to y2
|
| 188 |
+
return lambda x: ((1 - math.cos(x * math.pi / steps)) / 2) * (y2 - y1) + y1
|
| 189 |
+
|
| 190 |
+
|
| 191 |
+
def colorstr(*input):
|
| 192 |
+
# Colors a string https://en.wikipedia.org/wiki/ANSI_escape_code, i.e. colorstr('blue', 'hello world')
|
| 193 |
+
*args, string = input if len(input) > 1 else ('blue', 'bold', input[0]) # color arguments, string
|
| 194 |
+
colors = {'black': '\033[30m', # basic colors
|
| 195 |
+
'red': '\033[31m',
|
| 196 |
+
'green': '\033[32m',
|
| 197 |
+
'yellow': '\033[33m',
|
| 198 |
+
'blue': '\033[34m',
|
| 199 |
+
'magenta': '\033[35m',
|
| 200 |
+
'cyan': '\033[36m',
|
| 201 |
+
'white': '\033[37m',
|
| 202 |
+
'bright_black': '\033[90m', # bright colors
|
| 203 |
+
'bright_red': '\033[91m',
|
| 204 |
+
'bright_green': '\033[92m',
|
| 205 |
+
'bright_yellow': '\033[93m',
|
| 206 |
+
'bright_blue': '\033[94m',
|
| 207 |
+
'bright_magenta': '\033[95m',
|
| 208 |
+
'bright_cyan': '\033[96m',
|
| 209 |
+
'bright_white': '\033[97m',
|
| 210 |
+
'end': '\033[0m', # misc
|
| 211 |
+
'bold': '\033[1m',
|
| 212 |
+
'underline': '\033[4m'}
|
| 213 |
+
return ''.join(colors[x] for x in args) + f'{string}' + colors['end']
|
| 214 |
+
|
| 215 |
+
|
| 216 |
+
def labels_to_class_weights(labels, nc=80):
|
| 217 |
+
# Get class weights (inverse frequency) from training labels
|
| 218 |
+
if labels[0] is None: # no labels loaded
|
| 219 |
+
return torch.Tensor()
|
| 220 |
+
|
| 221 |
+
labels = np.concatenate(labels, 0) # labels.shape = (866643, 5) for COCO
|
| 222 |
+
classes = labels[:, 0].astype(np.int) # labels = [class xywh]
|
| 223 |
+
weights = np.bincount(classes, minlength=nc) # occurrences per class
|
| 224 |
+
|
| 225 |
+
# Prepend gridpoint count (for uCE training)
|
| 226 |
+
# gpi = ((320 / 32 * np.array([1, 2, 4])) ** 2 * 3).sum() # gridpoints per image
|
| 227 |
+
# weights = np.hstack([gpi * len(labels) - weights.sum() * 9, weights * 9]) ** 0.5 # prepend gridpoints to start
|
| 228 |
+
|
| 229 |
+
weights[weights == 0] = 1 # replace empty bins with 1
|
| 230 |
+
weights = 1 / weights # number of targets per class
|
| 231 |
+
weights /= weights.sum() # normalize
|
| 232 |
+
return torch.from_numpy(weights)
|
| 233 |
+
|
| 234 |
+
|
| 235 |
+
def labels_to_image_weights(labels, nc=80, class_weights=np.ones(80)):
|
| 236 |
+
# Produces image weights based on class_weights and image contents
|
| 237 |
+
class_counts = np.array([np.bincount(x[:, 0].astype(np.int), minlength=nc) for x in labels])
|
| 238 |
+
image_weights = (class_weights.reshape(1, nc) * class_counts).sum(1)
|
| 239 |
+
# index = random.choices(range(n), weights=image_weights, k=1) # weight image sample
|
| 240 |
+
return image_weights
|
| 241 |
+
|
| 242 |
+
|
| 243 |
+
def coco80_to_coco91_class(): # converts 80-index (val2014) to 91-index (paper)
|
| 244 |
+
# https://tech.amikelive.com/node-718/what-object-categories-labels-are-in-coco-dataset/
|
| 245 |
+
# a = np.loadtxt('data/coco.names', dtype='str', delimiter='\n')
|
| 246 |
+
# b = np.loadtxt('data/coco_paper.names', dtype='str', delimiter='\n')
|
| 247 |
+
# x1 = [list(a[i] == b).index(True) + 1 for i in range(80)] # darknet to coco
|
| 248 |
+
# x2 = [list(b[i] == a).index(True) if any(b[i] == a) else None for i in range(91)] # coco to darknet
|
| 249 |
+
x = [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 27, 28, 31, 32, 33, 34,
|
| 250 |
+
35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63,
|
| 251 |
+
64, 65, 67, 70, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 84, 85, 86, 87, 88, 89, 90]
|
| 252 |
+
return x
|
| 253 |
+
|
| 254 |
+
|
| 255 |
+
def xyxy2xywh(x):
|
| 256 |
+
# Convert nx4 boxes from [x1, y1, x2, y2] to [x, y, w, h] where xy1=top-left, xy2=bottom-right
|
| 257 |
+
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
|
| 258 |
+
y[:, 0] = (x[:, 0] + x[:, 2]) / 2 # x center
|
| 259 |
+
y[:, 1] = (x[:, 1] + x[:, 3]) / 2 # y center
|
| 260 |
+
y[:, 2] = x[:, 2] - x[:, 0] # width
|
| 261 |
+
y[:, 3] = x[:, 3] - x[:, 1] # height
|
| 262 |
+
return y
|
| 263 |
+
|
| 264 |
+
|
| 265 |
+
def xywh2xyxy(x):
|
| 266 |
+
# Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
|
| 267 |
+
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
|
| 268 |
+
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
|
| 269 |
+
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
|
| 270 |
+
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
|
| 271 |
+
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
|
| 272 |
+
return y
|
| 273 |
+
|
| 274 |
+
|
| 275 |
+
def xywhn2xyxy(x, w=640, h=640, padw=0, padh=0):
|
| 276 |
+
# Convert nx4 boxes from [x, y, w, h] normalized to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
|
| 277 |
+
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
|
| 278 |
+
y[:, 0] = w * (x[:, 0] - x[:, 2] / 2) + padw # top left x
|
| 279 |
+
y[:, 1] = h * (x[:, 1] - x[:, 3] / 2) + padh # top left y
|
| 280 |
+
y[:, 2] = w * (x[:, 0] + x[:, 2] / 2) + padw # bottom right x
|
| 281 |
+
y[:, 3] = h * (x[:, 1] + x[:, 3] / 2) + padh # bottom right y
|
| 282 |
+
return y
|
| 283 |
+
|
| 284 |
+
|
| 285 |
+
def xyn2xy(x, w=640, h=640, padw=0, padh=0):
|
| 286 |
+
# Convert normalized segments into pixel segments, shape (n,2)
|
| 287 |
+
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
|
| 288 |
+
y[:, 0] = w * x[:, 0] + padw # top left x
|
| 289 |
+
y[:, 1] = h * x[:, 1] + padh # top left y
|
| 290 |
+
return y
|
| 291 |
+
|
| 292 |
+
|
| 293 |
+
def segment2box(segment, width=640, height=640):
|
| 294 |
+
# Convert 1 segment label to 1 box label, applying inside-image constraint, i.e. (xy1, xy2, ...) to (xyxy)
|
| 295 |
+
x, y = segment.T # segment xy
|
| 296 |
+
inside = (x >= 0) & (y >= 0) & (x <= width) & (y <= height)
|
| 297 |
+
x, y, = x[inside], y[inside]
|
| 298 |
+
return np.array([x.min(), y.min(), x.max(), y.max()]) if any(x) else np.zeros((1, 4)) # xyxy
|
| 299 |
+
|
| 300 |
+
|
| 301 |
+
def segments2boxes(segments):
|
| 302 |
+
# Convert segment labels to box labels, i.e. (cls, xy1, xy2, ...) to (cls, xywh)
|
| 303 |
+
boxes = []
|
| 304 |
+
for s in segments:
|
| 305 |
+
x, y = s.T # segment xy
|
| 306 |
+
boxes.append([x.min(), y.min(), x.max(), y.max()]) # cls, xyxy
|
| 307 |
+
return xyxy2xywh(np.array(boxes)) # cls, xywh
|
| 308 |
+
|
| 309 |
+
|
| 310 |
+
def resample_segments(segments, n=1000):
|
| 311 |
+
# Up-sample an (n,2) segment
|
| 312 |
+
for i, s in enumerate(segments):
|
| 313 |
+
x = np.linspace(0, len(s) - 1, n)
|
| 314 |
+
xp = np.arange(len(s))
|
| 315 |
+
segments[i] = np.concatenate([np.interp(x, xp, s[:, i]) for i in range(2)]).reshape(2, -1).T # segment xy
|
| 316 |
+
return segments
|
| 317 |
+
|
| 318 |
+
|
| 319 |
+
def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
|
| 320 |
+
# Rescale coords (xyxy) from img1_shape to img0_shape
|
| 321 |
+
if ratio_pad is None: # calculate from img0_shape
|
| 322 |
+
gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
|
| 323 |
+
pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
|
| 324 |
+
else:
|
| 325 |
+
gain = ratio_pad[0][0]
|
| 326 |
+
pad = ratio_pad[1]
|
| 327 |
+
|
| 328 |
+
coords[:, [0, 2]] -= pad[0] # x padding
|
| 329 |
+
coords[:, [1, 3]] -= pad[1] # y padding
|
| 330 |
+
coords[:, :4] /= gain
|
| 331 |
+
clip_coords(coords, img0_shape)
|
| 332 |
+
return coords
|
| 333 |
+
|
| 334 |
+
|
| 335 |
+
def clip_coords(boxes, img_shape):
|
| 336 |
+
# Clip bounding xyxy bounding boxes to image shape (height, width)
|
| 337 |
+
boxes[:, 0].clamp_(0, img_shape[1]) # x1
|
| 338 |
+
boxes[:, 1].clamp_(0, img_shape[0]) # y1
|
| 339 |
+
boxes[:, 2].clamp_(0, img_shape[1]) # x2
|
| 340 |
+
boxes[:, 3].clamp_(0, img_shape[0]) # y2
|
| 341 |
+
|
| 342 |
+
|
| 343 |
+
def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
|
| 344 |
+
# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
|
| 345 |
+
box2 = box2.T
|
| 346 |
+
|
| 347 |
+
# Get the coordinates of bounding boxes
|
| 348 |
+
if x1y1x2y2: # x1, y1, x2, y2 = box1
|
| 349 |
+
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
|
| 350 |
+
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
|
| 351 |
+
else: # transform from xywh to xyxy
|
| 352 |
+
b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
|
| 353 |
+
b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
|
| 354 |
+
b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
|
| 355 |
+
b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
|
| 356 |
+
|
| 357 |
+
# Intersection area
|
| 358 |
+
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
|
| 359 |
+
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
|
| 360 |
+
|
| 361 |
+
# Union Area
|
| 362 |
+
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
|
| 363 |
+
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
|
| 364 |
+
union = w1 * h1 + w2 * h2 - inter + eps
|
| 365 |
+
|
| 366 |
+
iou = inter / union
|
| 367 |
+
|
| 368 |
+
if GIoU or DIoU or CIoU:
|
| 369 |
+
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
|
| 370 |
+
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
|
| 371 |
+
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
|
| 372 |
+
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
|
| 373 |
+
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
|
| 374 |
+
(b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
|
| 375 |
+
if DIoU:
|
| 376 |
+
return iou - rho2 / c2 # DIoU
|
| 377 |
+
elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
|
| 378 |
+
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
|
| 379 |
+
with torch.no_grad():
|
| 380 |
+
alpha = v / (v - iou + (1 + eps))
|
| 381 |
+
return iou - (rho2 / c2 + v * alpha) # CIoU
|
| 382 |
+
else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
|
| 383 |
+
c_area = cw * ch + eps # convex area
|
| 384 |
+
return iou - (c_area - union) / c_area # GIoU
|
| 385 |
+
else:
|
| 386 |
+
return iou # IoU
|
| 387 |
+
|
| 388 |
+
|
| 389 |
+
|
| 390 |
+
|
| 391 |
+
def bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, alpha=2, eps=1e-9):
|
| 392 |
+
# Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4
|
| 393 |
+
box2 = box2.T
|
| 394 |
+
|
| 395 |
+
# Get the coordinates of bounding boxes
|
| 396 |
+
if x1y1x2y2: # x1, y1, x2, y2 = box1
|
| 397 |
+
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
|
| 398 |
+
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
|
| 399 |
+
else: # transform from xywh to xyxy
|
| 400 |
+
b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
|
| 401 |
+
b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
|
| 402 |
+
b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
|
| 403 |
+
b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
|
| 404 |
+
|
| 405 |
+
# Intersection area
|
| 406 |
+
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
|
| 407 |
+
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
|
| 408 |
+
|
| 409 |
+
# Union Area
|
| 410 |
+
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
|
| 411 |
+
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
|
| 412 |
+
union = w1 * h1 + w2 * h2 - inter + eps
|
| 413 |
+
|
| 414 |
+
# change iou into pow(iou+eps)
|
| 415 |
+
# iou = inter / union
|
| 416 |
+
iou = torch.pow(inter/union + eps, alpha)
|
| 417 |
+
# beta = 2 * alpha
|
| 418 |
+
if GIoU or DIoU or CIoU:
|
| 419 |
+
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
|
| 420 |
+
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
|
| 421 |
+
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
|
| 422 |
+
c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal
|
| 423 |
+
rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2)
|
| 424 |
+
rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2)
|
| 425 |
+
rho2 = ((rho_x ** 2 + rho_y ** 2) / 4) ** alpha # center distance
|
| 426 |
+
if DIoU:
|
| 427 |
+
return iou - rho2 / c2 # DIoU
|
| 428 |
+
elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
|
| 429 |
+
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
|
| 430 |
+
with torch.no_grad():
|
| 431 |
+
alpha_ciou = v / ((1 + eps) - inter / union + v)
|
| 432 |
+
# return iou - (rho2 / c2 + v * alpha_ciou) # CIoU
|
| 433 |
+
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
|
| 434 |
+
else: # GIoU https://arxiv.org/pdf/1902.09630.pdf
|
| 435 |
+
# c_area = cw * ch + eps # convex area
|
| 436 |
+
# return iou - (c_area - union) / c_area # GIoU
|
| 437 |
+
c_area = torch.max(cw * ch + eps, union) # convex area
|
| 438 |
+
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU
|
| 439 |
+
else:
|
| 440 |
+
return iou # torch.log(iou+eps) or iou
|
| 441 |
+
|
| 442 |
+
|
| 443 |
+
def box_iou(box1, box2):
|
| 444 |
+
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
|
| 445 |
+
"""
|
| 446 |
+
Return intersection-over-union (Jaccard index) of boxes.
|
| 447 |
+
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
|
| 448 |
+
Arguments:
|
| 449 |
+
box1 (Tensor[N, 4])
|
| 450 |
+
box2 (Tensor[M, 4])
|
| 451 |
+
Returns:
|
| 452 |
+
iou (Tensor[N, M]): the NxM matrix containing the pairwise
|
| 453 |
+
IoU values for every element in boxes1 and boxes2
|
| 454 |
+
"""
|
| 455 |
+
|
| 456 |
+
def box_area(box):
|
| 457 |
+
# box = 4xn
|
| 458 |
+
return (box[2] - box[0]) * (box[3] - box[1])
|
| 459 |
+
|
| 460 |
+
area1 = box_area(box1.T)
|
| 461 |
+
area2 = box_area(box2.T)
|
| 462 |
+
|
| 463 |
+
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
|
| 464 |
+
inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
|
| 465 |
+
return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
|
| 466 |
+
|
| 467 |
+
|
| 468 |
+
def wh_iou(wh1, wh2):
|
| 469 |
+
# Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
|
| 470 |
+
wh1 = wh1[:, None] # [N,1,2]
|
| 471 |
+
wh2 = wh2[None] # [1,M,2]
|
| 472 |
+
inter = torch.min(wh1, wh2).prod(2) # [N,M]
|
| 473 |
+
return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
|
| 474 |
+
|
| 475 |
+
|
| 476 |
+
def box_giou(box1, box2):
|
| 477 |
+
"""
|
| 478 |
+
Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
|
| 479 |
+
Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
|
| 480 |
+
``0 <= x1 < x2`` and ``0 <= y1 < y2``.
|
| 481 |
+
Args:
|
| 482 |
+
boxes1 (Tensor[N, 4]): first set of boxes
|
| 483 |
+
boxes2 (Tensor[M, 4]): second set of boxes
|
| 484 |
+
Returns:
|
| 485 |
+
Tensor[N, M]: the NxM matrix containing the pairwise generalized IoU values
|
| 486 |
+
for every element in boxes1 and boxes2
|
| 487 |
+
"""
|
| 488 |
+
|
| 489 |
+
def box_area(box):
|
| 490 |
+
# box = 4xn
|
| 491 |
+
return (box[2] - box[0]) * (box[3] - box[1])
|
| 492 |
+
|
| 493 |
+
area1 = box_area(box1.T)
|
| 494 |
+
area2 = box_area(box2.T)
|
| 495 |
+
|
| 496 |
+
inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
|
| 497 |
+
union = (area1[:, None] + area2 - inter)
|
| 498 |
+
|
| 499 |
+
iou = inter / union
|
| 500 |
+
|
| 501 |
+
lti = torch.min(box1[:, None, :2], box2[:, :2])
|
| 502 |
+
rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
|
| 503 |
+
|
| 504 |
+
whi = (rbi - lti).clamp(min=0) # [N,M,2]
|
| 505 |
+
areai = whi[:, :, 0] * whi[:, :, 1]
|
| 506 |
+
|
| 507 |
+
return iou - (areai - union) / areai
|
| 508 |
+
|
| 509 |
+
|
| 510 |
+
def box_ciou(box1, box2, eps: float = 1e-7):
|
| 511 |
+
"""
|
| 512 |
+
Return complete intersection-over-union (Jaccard index) between two sets of boxes.
|
| 513 |
+
Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
|
| 514 |
+
``0 <= x1 < x2`` and ``0 <= y1 < y2``.
|
| 515 |
+
Args:
|
| 516 |
+
boxes1 (Tensor[N, 4]): first set of boxes
|
| 517 |
+
boxes2 (Tensor[M, 4]): second set of boxes
|
| 518 |
+
eps (float, optional): small number to prevent division by zero. Default: 1e-7
|
| 519 |
+
Returns:
|
| 520 |
+
Tensor[N, M]: the NxM matrix containing the pairwise complete IoU values
|
| 521 |
+
for every element in boxes1 and boxes2
|
| 522 |
+
"""
|
| 523 |
+
|
| 524 |
+
def box_area(box):
|
| 525 |
+
# box = 4xn
|
| 526 |
+
return (box[2] - box[0]) * (box[3] - box[1])
|
| 527 |
+
|
| 528 |
+
area1 = box_area(box1.T)
|
| 529 |
+
area2 = box_area(box2.T)
|
| 530 |
+
|
| 531 |
+
inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
|
| 532 |
+
union = (area1[:, None] + area2 - inter)
|
| 533 |
+
|
| 534 |
+
iou = inter / union
|
| 535 |
+
|
| 536 |
+
lti = torch.min(box1[:, None, :2], box2[:, :2])
|
| 537 |
+
rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
|
| 538 |
+
|
| 539 |
+
whi = (rbi - lti).clamp(min=0) # [N,M,2]
|
| 540 |
+
diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
|
| 541 |
+
|
| 542 |
+
# centers of boxes
|
| 543 |
+
x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
|
| 544 |
+
y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
|
| 545 |
+
x_g = (box2[:, 0] + box2[:, 2]) / 2
|
| 546 |
+
y_g = (box2[:, 1] + box2[:, 3]) / 2
|
| 547 |
+
# The distance between boxes' centers squared.
|
| 548 |
+
centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
|
| 549 |
+
|
| 550 |
+
w_pred = box1[:, None, 2] - box1[:, None, 0]
|
| 551 |
+
h_pred = box1[:, None, 3] - box1[:, None, 1]
|
| 552 |
+
|
| 553 |
+
w_gt = box2[:, 2] - box2[:, 0]
|
| 554 |
+
h_gt = box2[:, 3] - box2[:, 1]
|
| 555 |
+
|
| 556 |
+
v = (4 / (torch.pi ** 2)) * torch.pow((torch.atan(w_gt / h_gt) - torch.atan(w_pred / h_pred)), 2)
|
| 557 |
+
with torch.no_grad():
|
| 558 |
+
alpha = v / (1 - iou + v + eps)
|
| 559 |
+
return iou - (centers_distance_squared / diagonal_distance_squared) - alpha * v
|
| 560 |
+
|
| 561 |
+
|
| 562 |
+
def box_diou(box1, box2, eps: float = 1e-7):
|
| 563 |
+
"""
|
| 564 |
+
Return distance intersection-over-union (Jaccard index) between two sets of boxes.
|
| 565 |
+
Both sets of boxes are expected to be in ``(x1, y1, x2, y2)`` format with
|
| 566 |
+
``0 <= x1 < x2`` and ``0 <= y1 < y2``.
|
| 567 |
+
Args:
|
| 568 |
+
boxes1 (Tensor[N, 4]): first set of boxes
|
| 569 |
+
boxes2 (Tensor[M, 4]): second set of boxes
|
| 570 |
+
eps (float, optional): small number to prevent division by zero. Default: 1e-7
|
| 571 |
+
Returns:
|
| 572 |
+
Tensor[N, M]: the NxM matrix containing the pairwise distance IoU values
|
| 573 |
+
for every element in boxes1 and boxes2
|
| 574 |
+
"""
|
| 575 |
+
|
| 576 |
+
def box_area(box):
|
| 577 |
+
# box = 4xn
|
| 578 |
+
return (box[2] - box[0]) * (box[3] - box[1])
|
| 579 |
+
|
| 580 |
+
area1 = box_area(box1.T)
|
| 581 |
+
area2 = box_area(box2.T)
|
| 582 |
+
|
| 583 |
+
inter = (torch.min(box1[:, None, 2:], box2[:, 2:]) - torch.max(box1[:, None, :2], box2[:, :2])).clamp(0).prod(2)
|
| 584 |
+
union = (area1[:, None] + area2 - inter)
|
| 585 |
+
|
| 586 |
+
iou = inter / union
|
| 587 |
+
|
| 588 |
+
lti = torch.min(box1[:, None, :2], box2[:, :2])
|
| 589 |
+
rbi = torch.max(box1[:, None, 2:], box2[:, 2:])
|
| 590 |
+
|
| 591 |
+
whi = (rbi - lti).clamp(min=0) # [N,M,2]
|
| 592 |
+
diagonal_distance_squared = (whi[:, :, 0] ** 2) + (whi[:, :, 1] ** 2) + eps
|
| 593 |
+
|
| 594 |
+
# centers of boxes
|
| 595 |
+
x_p = (box1[:, None, 0] + box1[:, None, 2]) / 2
|
| 596 |
+
y_p = (box1[:, None, 1] + box1[:, None, 3]) / 2
|
| 597 |
+
x_g = (box2[:, 0] + box2[:, 2]) / 2
|
| 598 |
+
y_g = (box2[:, 1] + box2[:, 3]) / 2
|
| 599 |
+
# The distance between boxes' centers squared.
|
| 600 |
+
centers_distance_squared = (x_p - x_g) ** 2 + (y_p - y_g) ** 2
|
| 601 |
+
|
| 602 |
+
# The distance IoU is the IoU penalized by a normalized
|
| 603 |
+
# distance between boxes' centers squared.
|
| 604 |
+
return iou - (centers_distance_squared / diagonal_distance_squared)
|
| 605 |
+
|
| 606 |
+
|
| 607 |
+
def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
|
| 608 |
+
labels=()):
|
| 609 |
+
"""Runs Non-Maximum Suppression (NMS) on inference results
|
| 610 |
+
|
| 611 |
+
Returns:
|
| 612 |
+
list of detections, on (n,6) tensor per image [xyxy, conf, cls]
|
| 613 |
+
"""
|
| 614 |
+
|
| 615 |
+
nc = prediction.shape[2] - 5 # number of classes
|
| 616 |
+
xc = prediction[..., 4] > conf_thres # candidates
|
| 617 |
+
|
| 618 |
+
# Settings
|
| 619 |
+
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
|
| 620 |
+
max_det = 300 # maximum number of detections per image
|
| 621 |
+
max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
|
| 622 |
+
time_limit = 10.0 # seconds to quit after
|
| 623 |
+
redundant = True # require redundant detections
|
| 624 |
+
multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
|
| 625 |
+
merge = False # use merge-NMS
|
| 626 |
+
|
| 627 |
+
t = time.time()
|
| 628 |
+
output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
|
| 629 |
+
for xi, x in enumerate(prediction): # image index, image inference
|
| 630 |
+
# Apply constraints
|
| 631 |
+
# x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
|
| 632 |
+
x = x[xc[xi]] # confidence
|
| 633 |
+
|
| 634 |
+
# Cat apriori labels if autolabelling
|
| 635 |
+
if labels and len(labels[xi]):
|
| 636 |
+
l = labels[xi]
|
| 637 |
+
v = torch.zeros((len(l), nc + 5), device=x.device)
|
| 638 |
+
v[:, :4] = l[:, 1:5] # box
|
| 639 |
+
v[:, 4] = 1.0 # conf
|
| 640 |
+
v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
|
| 641 |
+
x = torch.cat((x, v), 0)
|
| 642 |
+
|
| 643 |
+
# If none remain process next image
|
| 644 |
+
if not x.shape[0]:
|
| 645 |
+
continue
|
| 646 |
+
|
| 647 |
+
# Compute conf
|
| 648 |
+
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
|
| 649 |
+
|
| 650 |
+
# Box (center x, center y, width, height) to (x1, y1, x2, y2)
|
| 651 |
+
box = xywh2xyxy(x[:, :4])
|
| 652 |
+
|
| 653 |
+
# Detections matrix nx6 (xyxy, conf, cls)
|
| 654 |
+
if multi_label:
|
| 655 |
+
i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
|
| 656 |
+
x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
|
| 657 |
+
else: # best class only
|
| 658 |
+
conf, j = x[:, 5:].max(1, keepdim=True)
|
| 659 |
+
x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
|
| 660 |
+
|
| 661 |
+
# Filter by class
|
| 662 |
+
if classes is not None:
|
| 663 |
+
x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
|
| 664 |
+
|
| 665 |
+
# Apply finite constraint
|
| 666 |
+
# if not torch.isfinite(x).all():
|
| 667 |
+
# x = x[torch.isfinite(x).all(1)]
|
| 668 |
+
|
| 669 |
+
# Check shape
|
| 670 |
+
n = x.shape[0] # number of boxes
|
| 671 |
+
if not n: # no boxes
|
| 672 |
+
continue
|
| 673 |
+
elif n > max_nms: # excess boxes
|
| 674 |
+
x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
|
| 675 |
+
|
| 676 |
+
# Batched NMS
|
| 677 |
+
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
|
| 678 |
+
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
|
| 679 |
+
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
|
| 680 |
+
if i.shape[0] > max_det: # limit detections
|
| 681 |
+
i = i[:max_det]
|
| 682 |
+
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
|
| 683 |
+
# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
|
| 684 |
+
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
|
| 685 |
+
weights = iou * scores[None] # box weights
|
| 686 |
+
x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
|
| 687 |
+
if redundant:
|
| 688 |
+
i = i[iou.sum(1) > 1] # require redundancy
|
| 689 |
+
|
| 690 |
+
output[xi] = x[i]
|
| 691 |
+
if (time.time() - t) > time_limit:
|
| 692 |
+
print(f'WARNING: NMS time limit {time_limit}s exceeded')
|
| 693 |
+
break # time limit exceeded
|
| 694 |
+
|
| 695 |
+
return output
|
| 696 |
+
|
| 697 |
+
|
| 698 |
+
def strip_optimizer(f='best.pt', s=''): # from utils.general import *; strip_optimizer()
|
| 699 |
+
# Strip optimizer from 'f' to finalize training, optionally save as 's'
|
| 700 |
+
x = torch.load(f, map_location=torch.device('cpu'))
|
| 701 |
+
if x.get('ema'):
|
| 702 |
+
x['model'] = x['ema'] # replace model with ema
|
| 703 |
+
for k in 'optimizer', 'training_results', 'wandb_id', 'ema', 'updates': # keys
|
| 704 |
+
x[k] = None
|
| 705 |
+
x['epoch'] = -1
|
| 706 |
+
x['model'].half() # to FP16
|
| 707 |
+
for p in x['model'].parameters():
|
| 708 |
+
p.requires_grad = False
|
| 709 |
+
torch.save(x, s or f)
|
| 710 |
+
mb = os.path.getsize(s or f) / 1E6 # filesize
|
| 711 |
+
print(f"Optimizer stripped from {f},{(' saved as %s,' % s) if s else ''} {mb:.1f}MB")
|
| 712 |
+
|
| 713 |
+
|
| 714 |
+
def print_mutation(hyp, results, yaml_file='hyp_evolved.yaml', bucket=''):
|
| 715 |
+
# Print mutation results to evolve.txt (for use with train.py --evolve)
|
| 716 |
+
a = '%10s' * len(hyp) % tuple(hyp.keys()) # hyperparam keys
|
| 717 |
+
b = '%10.3g' * len(hyp) % tuple(hyp.values()) # hyperparam values
|
| 718 |
+
c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
|
| 719 |
+
print('\n%s\n%s\nEvolved fitness: %s\n' % (a, b, c))
|
| 720 |
+
|
| 721 |
+
if bucket:
|
| 722 |
+
url = 'gs://%s/evolve.txt' % bucket
|
| 723 |
+
if gsutil_getsize(url) > (os.path.getsize('evolve.txt') if os.path.exists('evolve.txt') else 0):
|
| 724 |
+
os.system('gsutil cp %s .' % url) # download evolve.txt if larger than local
|
| 725 |
+
|
| 726 |
+
with open('evolve.txt', 'a') as f: # append result
|
| 727 |
+
f.write(c + b + '\n')
|
| 728 |
+
x = np.unique(np.loadtxt('evolve.txt', ndmin=2), axis=0) # load unique rows
|
| 729 |
+
x = x[np.argsort(-fitness(x))] # sort
|
| 730 |
+
np.savetxt('evolve.txt', x, '%10.3g') # save sort by fitness
|
| 731 |
+
|
| 732 |
+
# Save yaml
|
| 733 |
+
for i, k in enumerate(hyp.keys()):
|
| 734 |
+
hyp[k] = float(x[0, i + 7])
|
| 735 |
+
with open(yaml_file, 'w') as f:
|
| 736 |
+
results = tuple(x[0, :7])
|
| 737 |
+
c = '%10.4g' * len(results) % results # results (P, R, mAP@0.5, mAP@0.5:0.95, val_losses x 3)
|
| 738 |
+
f.write('# Hyperparameter Evolution Results\n# Generations: %g\n# Metrics: ' % len(x) + c + '\n\n')
|
| 739 |
+
yaml.dump(hyp, f, sort_keys=False)
|
| 740 |
+
|
| 741 |
+
if bucket:
|
| 742 |
+
os.system('gsutil cp evolve.txt %s gs://%s' % (yaml_file, bucket)) # upload
|
| 743 |
+
|
| 744 |
+
|
| 745 |
+
def apply_classifier(x, model, img, im0):
|
| 746 |
+
# applies a second stage classifier to yolo outputs
|
| 747 |
+
im0 = [im0] if isinstance(im0, np.ndarray) else im0
|
| 748 |
+
for i, d in enumerate(x): # per image
|
| 749 |
+
if d is not None and len(d):
|
| 750 |
+
d = d.clone()
|
| 751 |
+
|
| 752 |
+
# Reshape and pad cutouts
|
| 753 |
+
b = xyxy2xywh(d[:, :4]) # boxes
|
| 754 |
+
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # rectangle to square
|
| 755 |
+
b[:, 2:] = b[:, 2:] * 1.3 + 30 # pad
|
| 756 |
+
d[:, :4] = xywh2xyxy(b).long()
|
| 757 |
+
|
| 758 |
+
# Rescale boxes from img_size to im0 size
|
| 759 |
+
scale_coords(img.shape[2:], d[:, :4], im0[i].shape)
|
| 760 |
+
|
| 761 |
+
# Classes
|
| 762 |
+
pred_cls1 = d[:, 5].long()
|
| 763 |
+
ims = []
|
| 764 |
+
for j, a in enumerate(d): # per item
|
| 765 |
+
cutout = im0[i][int(a[1]):int(a[3]), int(a[0]):int(a[2])]
|
| 766 |
+
im = cv2.resize(cutout, (224, 224)) # BGR
|
| 767 |
+
# cv2.imwrite('test%i.jpg' % j, cutout)
|
| 768 |
+
|
| 769 |
+
im = im[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
|
| 770 |
+
im = np.ascontiguousarray(im, dtype=np.float32) # uint8 to float32
|
| 771 |
+
im /= 255.0 # 0 - 255 to 0.0 - 1.0
|
| 772 |
+
ims.append(im)
|
| 773 |
+
|
| 774 |
+
pred_cls2 = model(torch.Tensor(ims).to(d.device)).argmax(1) # classifier prediction
|
| 775 |
+
x[i] = x[i][pred_cls1 == pred_cls2] # retain matching class detections
|
| 776 |
+
|
| 777 |
+
return x
|
| 778 |
+
|
| 779 |
+
|
| 780 |
+
def increment_path(path, exist_ok=True, sep=''):
|
| 781 |
+
# Increment path, i.e. runs/exp --> runs/exp{sep}0, runs/exp{sep}1 etc.
|
| 782 |
+
path = Path(path) # os-agnostic
|
| 783 |
+
if (path.exists() and exist_ok) or (not path.exists()):
|
| 784 |
+
return str(path)
|
| 785 |
+
else:
|
| 786 |
+
dirs = glob.glob(f"{path}{sep}*") # similar paths
|
| 787 |
+
matches = [re.search(rf"%s{sep}(\d+)" % path.stem, d) for d in dirs]
|
| 788 |
+
i = [int(m.groups()[0]) for m in matches if m] # indices
|
| 789 |
+
n = max(i) + 1 if i else 2 # increment number
|
| 790 |
+
return f"{path}{sep}{n}" # update path
|