
Axial-DeepLab
Axial-DeepLab, improving over Panoptic-DeepLab, incorporates the powerful axial self-attention modules [1], also known as the encoder of Axial Transformers [2], for general dense prediction tasks. In this document, we demonstrate the effectiveness of Axial-DeepLab on the task of panoptic segmentation [6], unifying semantic segmentation and instance segmentation.
To reduce the computation complexity of 2D self-attention (especially prominent for dense pixel prediction tasks) and further to allow us to perform attention witin a larger or even global region, we factorize the 2D self-attention [1, 3, 4] into two 1D self-attention [2, 5]. We then effectively integrate the axial-attention into a residual block [7], as illustrated in Fig. 1.
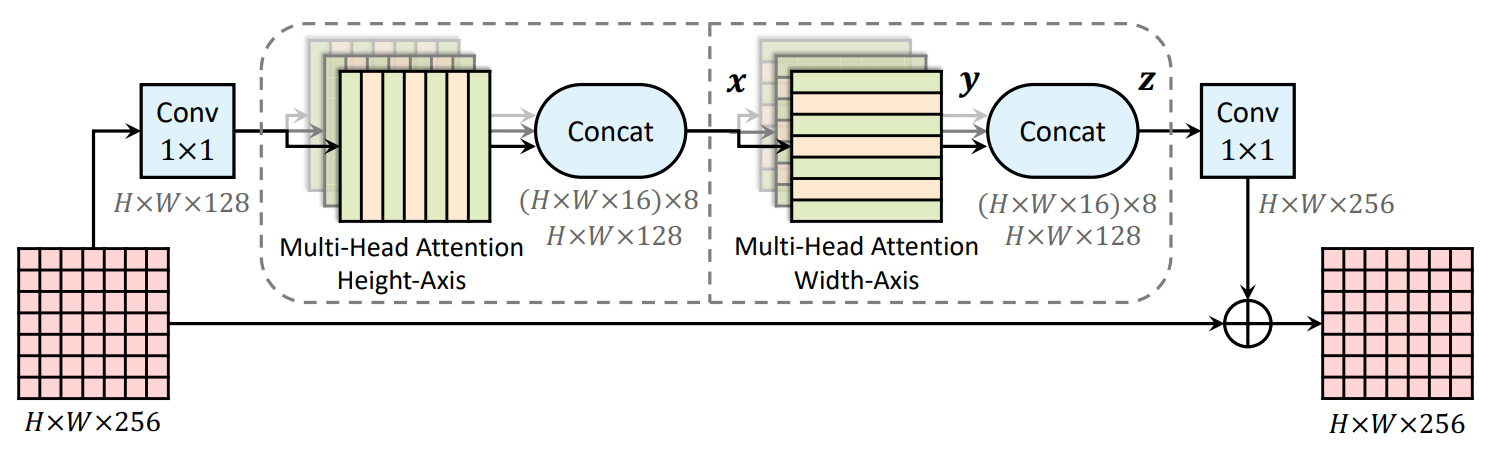
Figure 1. An axial-attention (residual) block, which consists of two
axial-attention layers operating along height- and width-axis
sequentially.
The backbone of Axial-DeepLab, called Axial-ResNet, is obtained by replacing the residual blocks in any type of ResNets (e.g., Wide ResNets [8, 9]) with our proposed axial-attention blocks. Optionally, one could stack only the axial-attention blocks to form an axial stand-alone self-attention backbone. However, considering a better speed-accuracy trade-off (convolutions are typically well-optimized on modern accelerators), we adopt the hybrid CNN-Transformer architecture, where we stack the effective axial-attention blocks on top of the first few stages of ResNets (e.g., Wide ResNets). In particular, in this document, we explore the case where we stack the axial-attention blocks after the conv3_x, i.e., we apply axial-attentions after (and including) stride 16 feature maps. This hybrid CNN-Transformer architecture is very effective on panoptic segmentation tasks as shown in the Model Zoo below.
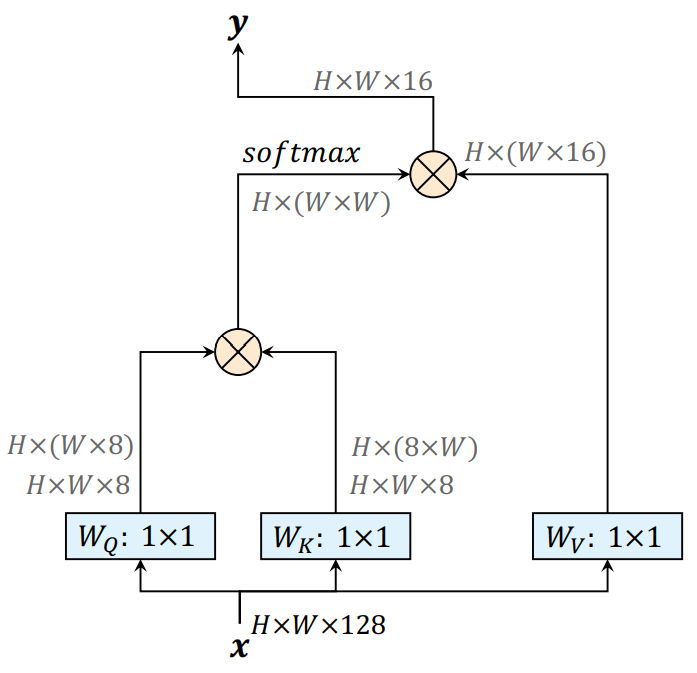
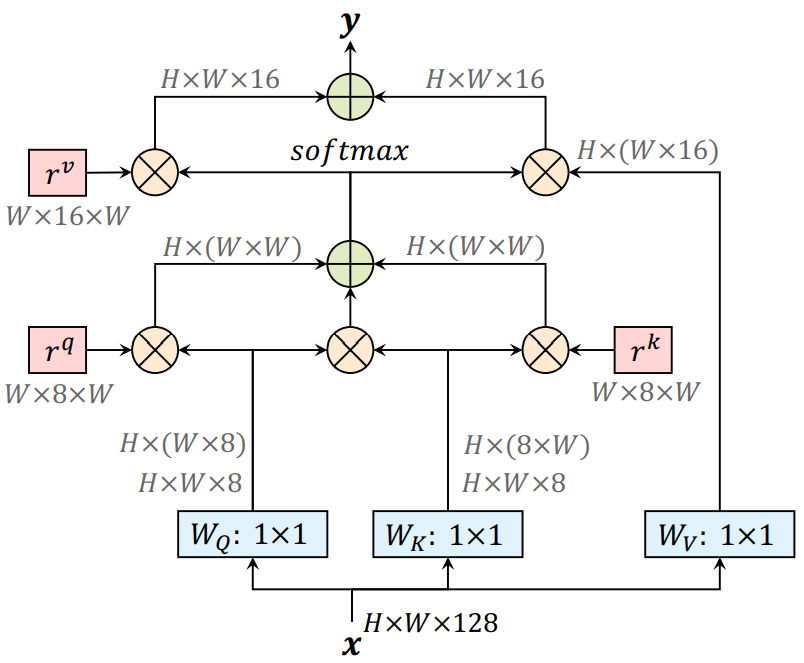
Additionally, we propose a position-sensitive self-attention design, which captures long range interactions with precise positional information. We illustrate the difference between our design and the popular non-local block in Fig. 2.
Prerequisite
Make sure the software is properly installed.
Make sure the target dataset is correctly prepared (e.g., Cityscapes).
Download the ImageNet pretrained checkpoints, and update the
initial_checkpointpath in the config files.
Model Zoo
In the Model Zoo, we explore building axial-attention blocks on top of SWideRNet (Scaling Wide ResNets) and MaX-DeepLab backbones (i.e., only the ImageNet pretrained backbone without any Mask Transformers).
Herein, we highlight some of the employed backbones:
Axial-SWideRNet-(1, 1, x), where x = $${1, 3, 4.5}$$, scaling the backbone layers (excluding the stem) of Wide-ResNet-41 by a factor of x. This backbone augments the naive SWideRNet (i.e., no Squeeze-and-Excitation or Switchable Atrous Convolution) with axial-attention blocks in the last two stages.
MaX-DeepLab-S-Backbone: The ImageNet pretrained backbone of MaX-DeepLab-S (i.e., without any Mask Transformers). This backbone augments the ResNet-50-Beta (i.e., replacing the original stem with Inception stem) with axial-attention blocks in the last two stages.
MaX-DeepLab-L-Backbone: The ImageNet pretrained backbone of MaX-DeepLab-L (i.e., without any Mask Transformers). This backbone adds a stacked decoder on top of the Wide ResNet-41, and incorporates axial-attention blocks to all feature maps with output stride 16 and larger.
Cityscapes Panoptic Segmentation
We provide checkpoints pretrained on Cityscapes train-fine set below. If you would like to train those models by yourself, please find the corresponding config files under this directory.
All the reported results are obtained by single-scale inference and ImageNet-1K pretrained checkpoints.
| Backbone | Output stride | Input resolution | PQ [*] | mIoU [*] | PQ [**] | mIoU [**] | APMask [**] |
|---|---|---|---|---|---|---|---|
| Axial-SWideRNet-(1, 1, 1) (config, ckpt) | 16 | 1025 x 2049 | 66.1 | 82.8 | 66.63 | 83.43 | 37.18 |
| Axial-SWideRNet-(1, 1, 3) (config, ckpt) | 16 | 1025 x 2049 | 67.1 | 83.5 | 67.63 | 83.97 | 40.00 |
| Axial-SWideRNet-(1, 1, 4.5) (config, ckpt) | 16 | 1025 x 2049 | 68.0 | 83.0 | 68.53 | 83.49 | 39.51 |
| MaX-DeepLab-S-Backbone (config, ckpt) | 16 | 1025 x 2049 | 64.5 | 82.2 | 64.97 | 82.63 | 35.55 |
| MaX-DeepLab-L-Backbone (config, ckpt) | 16 | 1025 x 2049 | 66.3 | 83.1 | 66.77 | 83.67 | 38.09 |
[*]: Results evaluated by the official script. Instance segmentation evaluation is not supported yet (need to convert our prediction format).
[**]: Results evaluated by our pipeline. See Q4 in FAQ.
Citing Axial-DeepLab
If you find this code helpful in your research or wish to refer to the baseline results, please use the following BibTeX entry.
- Axial-DeepLab:
@inproceedings{axial_deeplab_2020,
author={Huiyu Wang and Yukun Zhu and Bradley Green and Hartwig Adam and Alan Yuille and Liang-Chieh Chen},
title={{Axial-DeepLab}: Stand-Alone Axial-Attention for Panoptic Segmentation},
booktitle={ECCV},
year={2020}
}
- Panoptic-DeepLab:
@inproceedings{panoptic_deeplab_2020,
author={Bowen Cheng and Maxwell D Collins and Yukun Zhu and Ting Liu and Thomas S Huang and Hartwig Adam and Liang-Chieh Chen},
title={{Panoptic-DeepLab}: A Simple, Strong, and Fast Baseline for Bottom-Up Panoptic Segmentation},
booktitle={CVPR},
year={2020}
}
If you use the SWideRNet backbone w/ axial attention, please consider citing
- SWideRNet:
@article{swidernet_2020,
title={Scaling Wide Residual Networks for Panoptic Segmentation},
author={Chen, Liang-Chieh and Wang, Huiyu and Qiao, Siyuan},
journal={arXiv:2011.11675},
year={2020}
}
If you use the MaX-DeepLab-{S,L} backbone, please consider citing
- MaX-DeepLab:
@inproceedings{max_deeplab_2021,
author={Huiyu Wang and Yukun Zhu and Hartwig Adam and Alan Yuille and Liang-Chieh Chen},
title={{MaX-DeepLab}: End-to-End Panoptic Segmentation with Mask Transformers},
booktitle={CVPR},
year={2021}
}