Hands-on
Now that we studied the theory behind PPO, the best way to understand how it works is to implement it from scratch.
Implementing an architecture from scratch is the best way to understand it, and it’s a good habit. We have already done it for a value-based method with Q-Learning and a Policy-based method with Reinforce.
So, to be able to code it, we’re going to use two resources:
- A tutorial made by Costa Huang. Costa is behind CleanRL, a Deep Reinforcement Learning library that provides high-quality single-file implementation with research-friendly features.
- In addition to the tutorial, to go deeper, you can read the 13 core implementation details: https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/
Then, to test its robustness, we’re going to train it in:
And finally, we will push the trained model to the Hub to evaluate and visualize your agent playing.
LunarLander-v2 is the first environment you used when you started this course. At that time, you didn’t know how it worked, and now you can code it from scratch and train it. How incredible is that 🤩.
Let’s get started! 🚀
The colab notebook:
![]()
Unit 8: Proximal Policy Gradient (PPO) with PyTorch 🤖
In this notebook, you’ll learn to code your PPO agent from scratch with PyTorch using CleanRL implementation as model.
To test its robustness, we’re going to train it in:
We’re constantly trying to improve our tutorials, so if you find some issues in this notebook, please open an issue on the GitHub Repo.
Objectives of this notebook 🏆
At the end of the notebook, you will:
- Be able to code your PPO agent from scratch using PyTorch.
- Be able to push your trained agent and the code to the Hub with a nice video replay and an evaluation score 🔥.
Prerequisites 🏗️
Before diving into the notebook, you need to:
🔲 📚 Study PPO by reading Unit 8 🤗
To validate this hands-on for the certification process, you need to push one model, we don’t ask for a minimal result but we advise you to try different hyperparameters settings to get better results.
If you don’t find your model, go to the bottom of the page and click on the refresh button
For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
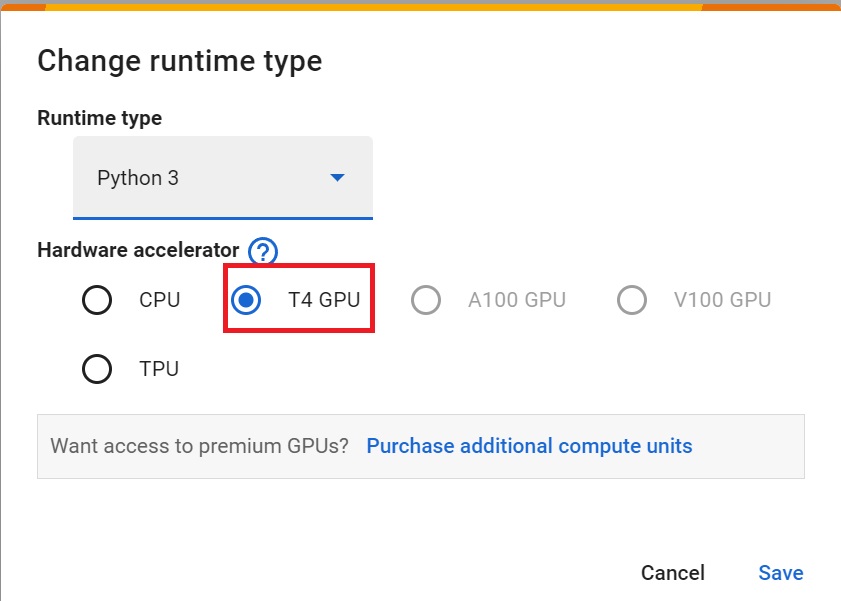
Set the GPU 💪
- To accelerate the agent’s training, we’ll use a GPU. To do that, go to
Runtime > Change Runtime type
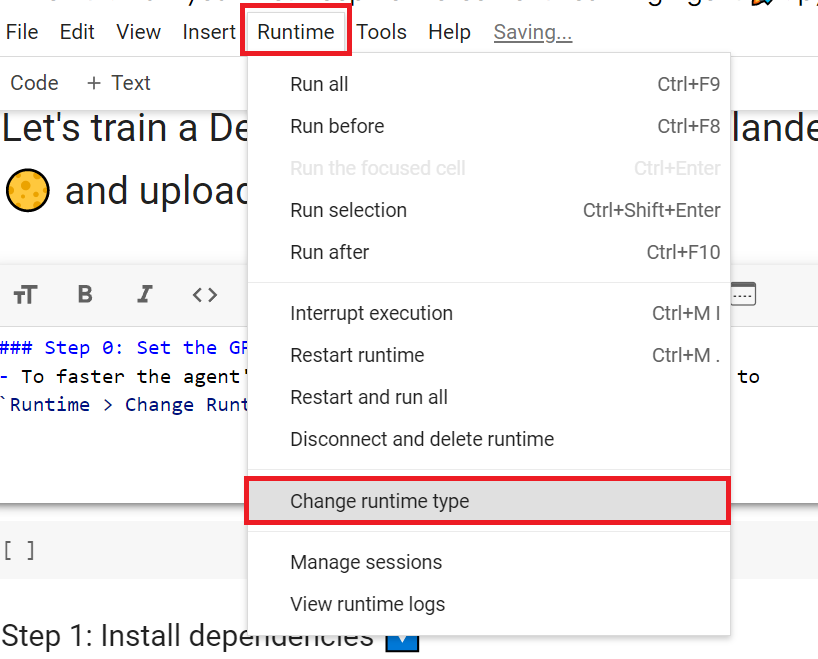
Hardware Accelerator > GPU
Create a virtual display 🔽
During the notebook, we’ll need to generate a replay video. To do so, with colab, we need to have a virtual screen to be able to render the environment (and thus record the frames).
Hence the following cell will install the librairies and create and run a virtual screen 🖥
apt install python-opengl
apt install ffmpeg
apt install xvfb
pip install pyglet==1.5
pip install pyvirtualdisplay# Virtual display
from pyvirtualdisplay import Display
virtual_display = Display(visible=0, size=(1400, 900))
virtual_display.start()Install dependencies 🔽
For this exercise, we use gym==0.21 because the video was recorded with Gym.
pip install gym==0.22
pip install imageio-ffmpeg
pip install huggingface_hub
pip install gym[box2d]==0.22Let’s code PPO from scratch with Costa Huang’s tutorial
- For the core implementation of PPO we’re going to use the excellent Costa Huang tutorial.
- In addition to the tutorial, to go deeper you can read the 37 core implementation details: https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/
👉 The video tutorial: https://youtu.be/MEt6rrxH8W4
from IPython.display import HTML
HTML(
'<iframe width="560" height="315" src="https://www.youtube.com/embed/MEt6rrxH8W4" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>'
)Add the Hugging Face Integration 🤗
In order to push our model to the Hub, we need to define a function
package_to_hubAdd dependencies we need to push our model to the Hub
from huggingface_hub import HfApi, upload_folder
from huggingface_hub.repocard import metadata_eval_result, metadata_save
from pathlib import Path
import datetime
import tempfile
import json
import shutil
import imageio
from wasabi import Printer
msg = Printer()- Add new argument in
parse_args()function to define the repo-id where we want to push the model.
# Adding HuggingFace argument
parser.add_argument(
"--repo-id",
type=str,
default="ThomasSimonini/ppo-CartPole-v1",
help="id of the model repository from the Hugging Face Hub {username/repo_name}",
)Next, we add the methods needed to push the model to the Hub
These methods will:
_evalutate_agent(): evaluate the agent._generate_model_card(): generate the model card of your agent._record_video(): record a video of your agent.
def package_to_hub(
repo_id,
model,
hyperparameters,
eval_env,
video_fps=30,
commit_message="Push agent to the Hub",
token=None,
logs=None,
):
"""
Evaluate, Generate a video and Upload a model to Hugging Face Hub.
This method does the complete pipeline:
- It evaluates the model
- It generates the model card
- It generates a replay video of the agent
- It pushes everything to the hub
:param repo_id: id of the model repository from the Hugging Face Hub
:param model: trained model
:param eval_env: environment used to evaluate the agent
:param fps: number of fps for rendering the video
:param commit_message: commit message
:param logs: directory on local machine of tensorboard logs you'd like to upload
"""
msg.info(
"This function will save, evaluate, generate a video of your agent, "
"create a model card and push everything to the hub. "
"It might take up to 1min. \n "
"This is a work in progress: if you encounter a bug, please open an issue."
)
# Step 1: Clone or create the repo
repo_url = HfApi().create_repo(
repo_id=repo_id,
token=token,
private=False,
exist_ok=True,
)
with tempfile.TemporaryDirectory() as tmpdirname:
tmpdirname = Path(tmpdirname)
# Step 2: Save the model
torch.save(model.state_dict(), tmpdirname / "model.pt")
# Step 3: Evaluate the model and build JSON
mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
# First get datetime
eval_datetime = datetime.datetime.now()
eval_form_datetime = eval_datetime.isoformat()
evaluate_data = {
"env_id": hyperparameters.env_id,
"mean_reward": mean_reward,
"std_reward": std_reward,
"n_evaluation_episodes": 10,
"eval_datetime": eval_form_datetime,
}
# Write a JSON file
with open(tmpdirname / "results.json", "w") as outfile:
json.dump(evaluate_data, outfile)
# Step 4: Generate a video
video_path = tmpdirname / "replay.mp4"
record_video(eval_env, model, video_path, video_fps)
# Step 5: Generate the model card
generated_model_card, metadata = _generate_model_card(
"PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
)
_save_model_card(tmpdirname, generated_model_card, metadata)
# Step 6: Add logs if needed
if logs:
_add_logdir(tmpdirname, Path(logs))
msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
repo_url = upload_folder(
repo_id=repo_id,
folder_path=tmpdirname,
path_in_repo="",
commit_message=commit_message,
token=token,
)
msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
return repo_url
def _evaluate_agent(env, n_eval_episodes, policy):
"""
Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
:param env: The evaluation environment
:param n_eval_episodes: Number of episode to evaluate the agent
:param policy: The agent
"""
episode_rewards = []
for episode in range(n_eval_episodes):
state = env.reset()
step = 0
done = False
total_rewards_ep = 0
while done is False:
state = torch.Tensor(state).to(device)
action, _, _, _ = policy.get_action_and_value(state)
new_state, reward, done, info = env.step(action.cpu().numpy())
total_rewards_ep += reward
if done:
break
state = new_state
episode_rewards.append(total_rewards_ep)
mean_reward = np.mean(episode_rewards)
std_reward = np.std(episode_rewards)
return mean_reward, std_reward
def record_video(env, policy, out_directory, fps=30):
images = []
done = False
state = env.reset()
img = env.render(mode="rgb_array")
images.append(img)
while not done:
state = torch.Tensor(state).to(device)
# Take the action (index) that have the maximum expected future reward given that state
action, _, _, _ = policy.get_action_and_value(state)
state, reward, done, info = env.step(
action.cpu().numpy()
) # We directly put next_state = state for recording logic
img = env.render(mode="rgb_array")
images.append(img)
imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
"""
Generate the model card for the Hub
:param model_name: name of the model
:env_id: name of the environment
:mean_reward: mean reward of the agent
:std_reward: standard deviation of the mean reward of the agent
:hyperparameters: training arguments
"""
# Step 1: Select the tags
metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
# Transform the hyperparams namespace to string
converted_dict = vars(hyperparameters)
converted_str = str(converted_dict)
converted_str = converted_str.split(", ")
converted_str = "\n".join(converted_str)
# Step 2: Generate the model card
model_card = f"""
# PPO Agent Playing {env_id}
This is a trained model of a PPO agent playing {env_id}.
# Hyperparameters
"""
return model_card, metadata
def generate_metadata(model_name, env_id, mean_reward, std_reward):
"""
Define the tags for the model card
:param model_name: name of the model
:param env_id: name of the environment
:mean_reward: mean reward of the agent
:std_reward: standard deviation of the mean reward of the agent
"""
metadata = {}
metadata["tags"] = [
env_id,
"ppo",
"deep-reinforcement-learning",
"reinforcement-learning",
"custom-implementation",
"deep-rl-course",
]
# Add metrics
eval = metadata_eval_result(
model_pretty_name=model_name,
task_pretty_name="reinforcement-learning",
task_id="reinforcement-learning",
metrics_pretty_name="mean_reward",
metrics_id="mean_reward",
metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
dataset_pretty_name=env_id,
dataset_id=env_id,
)
# Merges both dictionaries
metadata = {**metadata, **eval}
return metadata
def _save_model_card(local_path, generated_model_card, metadata):
"""Saves a model card for the repository.
:param local_path: repository directory
:param generated_model_card: model card generated by _generate_model_card()
:param metadata: metadata
"""
readme_path = local_path / "README.md"
readme = ""
if readme_path.exists():
with readme_path.open("r", encoding="utf8") as f:
readme = f.read()
else:
readme = generated_model_card
with readme_path.open("w", encoding="utf-8") as f:
f.write(readme)
# Save our metrics to Readme metadata
metadata_save(readme_path, metadata)
def _add_logdir(local_path: Path, logdir: Path):
"""Adds a logdir to the repository.
:param local_path: repository directory
:param logdir: logdir directory
"""
if logdir.exists() and logdir.is_dir():
# Add the logdir to the repository under new dir called logs
repo_logdir = local_path / "logs"
# Delete current logs if they exist
if repo_logdir.exists():
shutil.rmtree(repo_logdir)
# Copy logdir into repo logdir
shutil.copytree(logdir, repo_logdir)- Finally, we call this function at the end of the PPO training
# Create the evaluation environment
eval_env = gym.make(args.env_id)
package_to_hub(
repo_id=args.repo_id,
model=agent, # The model we want to save
hyperparameters=args,
eval_env=gym.make(args.env_id),
logs=f"runs/{run_name}",
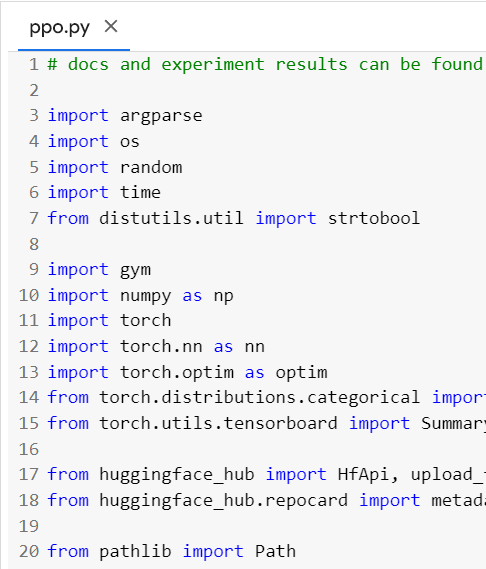
)- Here’s what the final ppo.py file looks like:
# docs and experiment results can be found at https://docs.cleanrl.dev/rl-algorithms/ppo/#ppopy
import argparse
import os
import random
import time
from distutils.util import strtobool
import gym
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from torch.distributions.categorical import Categorical
from torch.utils.tensorboard import SummaryWriter
from huggingface_hub import HfApi, upload_folder
from huggingface_hub.repocard import metadata_eval_result, metadata_save
from pathlib import Path
import datetime
import tempfile
import json
import shutil
import imageio
from wasabi import Printer
msg = Printer()
def parse_args():
# fmt: off
parser = argparse.ArgumentParser()
parser.add_argument("--exp-name", type=str, default=os.path.basename(__file__).rstrip(".py"),
help="the name of this experiment")
parser.add_argument("--seed", type=int, default=1,
help="seed of the experiment")
parser.add_argument("--torch-deterministic", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
help="if toggled, `torch.backends.cudnn.deterministic=False`")
parser.add_argument("--cuda", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
help="if toggled, cuda will be enabled by default")
parser.add_argument("--track", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
help="if toggled, this experiment will be tracked with Weights and Biases")
parser.add_argument("--wandb-project-name", type=str, default="cleanRL",
help="the wandb's project name")
parser.add_argument("--wandb-entity", type=str, default=None,
help="the entity (team) of wandb's project")
parser.add_argument("--capture-video", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
help="weather to capture videos of the agent performances (check out `videos` folder)")
# Algorithm specific arguments
parser.add_argument("--env-id", type=str, default="CartPole-v1",
help="the id of the environment")
parser.add_argument("--total-timesteps", type=int, default=50000,
help="total timesteps of the experiments")
parser.add_argument("--learning-rate", type=float, default=2.5e-4,
help="the learning rate of the optimizer")
parser.add_argument("--num-envs", type=int, default=4,
help="the number of parallel game environments")
parser.add_argument("--num-steps", type=int, default=128,
help="the number of steps to run in each environment per policy rollout")
parser.add_argument("--anneal-lr", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
help="Toggle learning rate annealing for policy and value networks")
parser.add_argument("--gae", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
help="Use GAE for advantage computation")
parser.add_argument("--gamma", type=float, default=0.99,
help="the discount factor gamma")
parser.add_argument("--gae-lambda", type=float, default=0.95,
help="the lambda for the general advantage estimation")
parser.add_argument("--num-minibatches", type=int, default=4,
help="the number of mini-batches")
parser.add_argument("--update-epochs", type=int, default=4,
help="the K epochs to update the policy")
parser.add_argument("--norm-adv", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
help="Toggles advantages normalization")
parser.add_argument("--clip-coef", type=float, default=0.2,
help="the surrogate clipping coefficient")
parser.add_argument("--clip-vloss", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
help="Toggles whether or not to use a clipped loss for the value function, as per the paper.")
parser.add_argument("--ent-coef", type=float, default=0.01,
help="coefficient of the entropy")
parser.add_argument("--vf-coef", type=float, default=0.5,
help="coefficient of the value function")
parser.add_argument("--max-grad-norm", type=float, default=0.5,
help="the maximum norm for the gradient clipping")
parser.add_argument("--target-kl", type=float, default=None,
help="the target KL divergence threshold")
# Adding HuggingFace argument
parser.add_argument("--repo-id", type=str, default="ThomasSimonini/ppo-CartPole-v1", help="id of the model repository from the Hugging Face Hub {username/repo_name}")
args = parser.parse_args()
args.batch_size = int(args.num_envs * args.num_steps)
args.minibatch_size = int(args.batch_size // args.num_minibatches)
# fmt: on
return args
def package_to_hub(
repo_id,
model,
hyperparameters,
eval_env,
video_fps=30,
commit_message="Push agent to the Hub",
token=None,
logs=None,
):
"""
Evaluate, Generate a video and Upload a model to Hugging Face Hub.
This method does the complete pipeline:
- It evaluates the model
- It generates the model card
- It generates a replay video of the agent
- It pushes everything to the hub
:param repo_id: id of the model repository from the Hugging Face Hub
:param model: trained model
:param eval_env: environment used to evaluate the agent
:param fps: number of fps for rendering the video
:param commit_message: commit message
:param logs: directory on local machine of tensorboard logs you'd like to upload
"""
msg.info(
"This function will save, evaluate, generate a video of your agent, "
"create a model card and push everything to the hub. "
"It might take up to 1min. \n "
"This is a work in progress: if you encounter a bug, please open an issue."
)
# Step 1: Clone or create the repo
repo_url = HfApi().create_repo(
repo_id=repo_id,
token=token,
private=False,
exist_ok=True,
)
with tempfile.TemporaryDirectory() as tmpdirname:
tmpdirname = Path(tmpdirname)
# Step 2: Save the model
torch.save(model.state_dict(), tmpdirname / "model.pt")
# Step 3: Evaluate the model and build JSON
mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
# First get datetime
eval_datetime = datetime.datetime.now()
eval_form_datetime = eval_datetime.isoformat()
evaluate_data = {
"env_id": hyperparameters.env_id,
"mean_reward": mean_reward,
"std_reward": std_reward,
"n_evaluation_episodes": 10,
"eval_datetime": eval_form_datetime,
}
# Write a JSON file
with open(tmpdirname / "results.json", "w") as outfile:
json.dump(evaluate_data, outfile)
# Step 4: Generate a video
video_path = tmpdirname / "replay.mp4"
record_video(eval_env, model, video_path, video_fps)
# Step 5: Generate the model card
generated_model_card, metadata = _generate_model_card(
"PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
)
_save_model_card(tmpdirname, generated_model_card, metadata)
# Step 6: Add logs if needed
if logs:
_add_logdir(tmpdirname, Path(logs))
msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
repo_url = upload_folder(
repo_id=repo_id,
folder_path=tmpdirname,
path_in_repo="",
commit_message=commit_message,
token=token,
)
msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
return repo_url
def _evaluate_agent(env, n_eval_episodes, policy):
"""
Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
:param env: The evaluation environment
:param n_eval_episodes: Number of episode to evaluate the agent
:param policy: The agent
"""
episode_rewards = []
for episode in range(n_eval_episodes):
state = env.reset()
step = 0
done = False
total_rewards_ep = 0
while done is False:
state = torch.Tensor(state).to(device)
action, _, _, _ = policy.get_action_and_value(state)
new_state, reward, done, info = env.step(action.cpu().numpy())
total_rewards_ep += reward
if done:
break
state = new_state
episode_rewards.append(total_rewards_ep)
mean_reward = np.mean(episode_rewards)
std_reward = np.std(episode_rewards)
return mean_reward, std_reward
def record_video(env, policy, out_directory, fps=30):
images = []
done = False
state = env.reset()
img = env.render(mode="rgb_array")
images.append(img)
while not done:
state = torch.Tensor(state).to(device)
# Take the action (index) that have the maximum expected future reward given that state
action, _, _, _ = policy.get_action_and_value(state)
state, reward, done, info = env.step(
action.cpu().numpy()
) # We directly put next_state = state for recording logic
img = env.render(mode="rgb_array")
images.append(img)
imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
"""
Generate the model card for the Hub
:param model_name: name of the model
:env_id: name of the environment
:mean_reward: mean reward of the agent
:std_reward: standard deviation of the mean reward of the agent
:hyperparameters: training arguments
"""
# Step 1: Select the tags
metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
# Transform the hyperparams namespace to string
converted_dict = vars(hyperparameters)
converted_str = str(converted_dict)
converted_str = converted_str.split(", ")
converted_str = "\n".join(converted_str)
# Step 2: Generate the model card
model_card = f"""
# PPO Agent Playing {env_id}
This is a trained model of a PPO agent playing {env_id}.
# Hyperparameters
"""
return model_card, metadata
def generate_metadata(model_name, env_id, mean_reward, std_reward):
"""
Define the tags for the model card
:param model_name: name of the model
:param env_id: name of the environment
:mean_reward: mean reward of the agent
:std_reward: standard deviation of the mean reward of the agent
"""
metadata = {}
metadata["tags"] = [
env_id,
"ppo",
"deep-reinforcement-learning",
"reinforcement-learning",
"custom-implementation",
"deep-rl-course",
]
# Add metrics
eval = metadata_eval_result(
model_pretty_name=model_name,
task_pretty_name="reinforcement-learning",
task_id="reinforcement-learning",
metrics_pretty_name="mean_reward",
metrics_id="mean_reward",
metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
dataset_pretty_name=env_id,
dataset_id=env_id,
)
# Merges both dictionaries
metadata = {**metadata, **eval}
return metadata
def _save_model_card(local_path, generated_model_card, metadata):
"""Saves a model card for the repository.
:param local_path: repository directory
:param generated_model_card: model card generated by _generate_model_card()
:param metadata: metadata
"""
readme_path = local_path / "README.md"
readme = ""
if readme_path.exists():
with readme_path.open("r", encoding="utf8") as f:
readme = f.read()
else:
readme = generated_model_card
with readme_path.open("w", encoding="utf-8") as f:
f.write(readme)
# Save our metrics to Readme metadata
metadata_save(readme_path, metadata)
def _add_logdir(local_path: Path, logdir: Path):
"""Adds a logdir to the repository.
:param local_path: repository directory
:param logdir: logdir directory
"""
if logdir.exists() and logdir.is_dir():
# Add the logdir to the repository under new dir called logs
repo_logdir = local_path / "logs"
# Delete current logs if they exist
if repo_logdir.exists():
shutil.rmtree(repo_logdir)
# Copy logdir into repo logdir
shutil.copytree(logdir, repo_logdir)
def make_env(env_id, seed, idx, capture_video, run_name):
def thunk():
env = gym.make(env_id)
env = gym.wrappers.RecordEpisodeStatistics(env)
if capture_video:
if idx == 0:
env = gym.wrappers.RecordVideo(env, f"videos/{run_name}")
env.seed(seed)
env.action_space.seed(seed)
env.observation_space.seed(seed)
return env
return thunk
def layer_init(layer, std=np.sqrt(2), bias_const=0.0):
torch.nn.init.orthogonal_(layer.weight, std)
torch.nn.init.constant_(layer.bias, bias_const)
return layer
class Agent(nn.Module):
def __init__(self, envs):
super().__init__()
self.critic = nn.Sequential(
layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
nn.Tanh(),
layer_init(nn.Linear(64, 64)),
nn.Tanh(),
layer_init(nn.Linear(64, 1), std=1.0),
)
self.actor = nn.Sequential(
layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
nn.Tanh(),
layer_init(nn.Linear(64, 64)),
nn.Tanh(),
layer_init(nn.Linear(64, envs.single_action_space.n), std=0.01),
)
def get_value(self, x):
return self.critic(x)
def get_action_and_value(self, x, action=None):
logits = self.actor(x)
probs = Categorical(logits=logits)
if action is None:
action = probs.sample()
return action, probs.log_prob(action), probs.entropy(), self.critic(x)
if __name__ == "__main__":
args = parse_args()
run_name = f"{args.env_id}__{args.exp_name}__{args.seed}__{int(time.time())}"
if args.track:
import wandb
wandb.init(
project=args.wandb_project_name,
entity=args.wandb_entity,
sync_tensorboard=True,
config=vars(args),
name=run_name,
monitor_gym=True,
save_code=True,
)
writer = SummaryWriter(f"runs/{run_name}")
writer.add_text(
"hyperparameters",
"|param|value|\n|-|-|\n%s" % ("\n".join([f"|{key}|{value}|" for key, value in vars(args).items()])),
)
# TRY NOT TO MODIFY: seeding
random.seed(args.seed)
np.random.seed(args.seed)
torch.manual_seed(args.seed)
torch.backends.cudnn.deterministic = args.torch_deterministic
device = torch.device("cuda" if torch.cuda.is_available() and args.cuda else "cpu")
# env setup
envs = gym.vector.SyncVectorEnv(
[make_env(args.env_id, args.seed + i, i, args.capture_video, run_name) for i in range(args.num_envs)]
)
assert isinstance(envs.single_action_space, gym.spaces.Discrete), "only discrete action space is supported"
agent = Agent(envs).to(device)
optimizer = optim.Adam(agent.parameters(), lr=args.learning_rate, eps=1e-5)
# ALGO Logic: Storage setup
obs = torch.zeros((args.num_steps, args.num_envs) + envs.single_observation_space.shape).to(device)
actions = torch.zeros((args.num_steps, args.num_envs) + envs.single_action_space.shape).to(device)
logprobs = torch.zeros((args.num_steps, args.num_envs)).to(device)
rewards = torch.zeros((args.num_steps, args.num_envs)).to(device)
dones = torch.zeros((args.num_steps, args.num_envs)).to(device)
values = torch.zeros((args.num_steps, args.num_envs)).to(device)
# TRY NOT TO MODIFY: start the game
global_step = 0
start_time = time.time()
next_obs = torch.Tensor(envs.reset()).to(device)
next_done = torch.zeros(args.num_envs).to(device)
num_updates = args.total_timesteps // args.batch_size
for update in range(1, num_updates + 1):
# Annealing the rate if instructed to do so.
if args.anneal_lr:
frac = 1.0 - (update - 1.0) / num_updates
lrnow = frac * args.learning_rate
optimizer.param_groups[0]["lr"] = lrnow
for step in range(0, args.num_steps):
global_step += 1 * args.num_envs
obs[step] = next_obs
dones[step] = next_done
# ALGO LOGIC: action logic
with torch.no_grad():
action, logprob, _, value = agent.get_action_and_value(next_obs)
values[step] = value.flatten()
actions[step] = action
logprobs[step] = logprob
# TRY NOT TO MODIFY: execute the game and log data.
next_obs, reward, done, info = envs.step(action.cpu().numpy())
rewards[step] = torch.tensor(reward).to(device).view(-1)
next_obs, next_done = torch.Tensor(next_obs).to(device), torch.Tensor(done).to(device)
for item in info:
if "episode" in item.keys():
print(f"global_step={global_step}, episodic_return={item['episode']['r']}")
writer.add_scalar("charts/episodic_return", item["episode"]["r"], global_step)
writer.add_scalar("charts/episodic_length", item["episode"]["l"], global_step)
break
# bootstrap value if not done
with torch.no_grad():
next_value = agent.get_value(next_obs).reshape(1, -1)
if args.gae:
advantages = torch.zeros_like(rewards).to(device)
lastgaelam = 0
for t in reversed(range(args.num_steps)):
if t == args.num_steps - 1:
nextnonterminal = 1.0 - next_done
nextvalues = next_value
else:
nextnonterminal = 1.0 - dones[t + 1]
nextvalues = values[t + 1]
delta = rewards[t] + args.gamma * nextvalues * nextnonterminal - values[t]
advantages[t] = lastgaelam = delta + args.gamma * args.gae_lambda * nextnonterminal * lastgaelam
returns = advantages + values
else:
returns = torch.zeros_like(rewards).to(device)
for t in reversed(range(args.num_steps)):
if t == args.num_steps - 1:
nextnonterminal = 1.0 - next_done
next_return = next_value
else:
nextnonterminal = 1.0 - dones[t + 1]
next_return = returns[t + 1]
returns[t] = rewards[t] + args.gamma * nextnonterminal * next_return
advantages = returns - values
# flatten the batch
b_obs = obs.reshape((-1,) + envs.single_observation_space.shape)
b_logprobs = logprobs.reshape(-1)
b_actions = actions.reshape((-1,) + envs.single_action_space.shape)
b_advantages = advantages.reshape(-1)
b_returns = returns.reshape(-1)
b_values = values.reshape(-1)
# Optimizing the policy and value network
b_inds = np.arange(args.batch_size)
clipfracs = []
for epoch in range(args.update_epochs):
np.random.shuffle(b_inds)
for start in range(0, args.batch_size, args.minibatch_size):
end = start + args.minibatch_size
mb_inds = b_inds[start:end]
_, newlogprob, entropy, newvalue = agent.get_action_and_value(
b_obs[mb_inds], b_actions.long()[mb_inds]
)
logratio = newlogprob - b_logprobs[mb_inds]
ratio = logratio.exp()
with torch.no_grad():
# calculate approx_kl http://joschu.net/blog/kl-approx.html
old_approx_kl = (-logratio).mean()
approx_kl = ((ratio - 1) - logratio).mean()
clipfracs += [((ratio - 1.0).abs() > args.clip_coef).float().mean().item()]
mb_advantages = b_advantages[mb_inds]
if args.norm_adv:
mb_advantages = (mb_advantages - mb_advantages.mean()) / (mb_advantages.std() + 1e-8)
# Policy loss
pg_loss1 = -mb_advantages * ratio
pg_loss2 = -mb_advantages * torch.clamp(ratio, 1 - args.clip_coef, 1 + args.clip_coef)
pg_loss = torch.max(pg_loss1, pg_loss2).mean()
# Value loss
newvalue = newvalue.view(-1)
if args.clip_vloss:
v_loss_unclipped = (newvalue - b_returns[mb_inds]) ** 2
v_clipped = b_values[mb_inds] + torch.clamp(
newvalue - b_values[mb_inds],
-args.clip_coef,
args.clip_coef,
)
v_loss_clipped = (v_clipped - b_returns[mb_inds]) ** 2
v_loss_max = torch.max(v_loss_unclipped, v_loss_clipped)
v_loss = 0.5 * v_loss_max.mean()
else:
v_loss = 0.5 * ((newvalue - b_returns[mb_inds]) ** 2).mean()
entropy_loss = entropy.mean()
loss = pg_loss - args.ent_coef * entropy_loss + v_loss * args.vf_coef
optimizer.zero_grad()
loss.backward()
nn.utils.clip_grad_norm_(agent.parameters(), args.max_grad_norm)
optimizer.step()
if args.target_kl is not None:
if approx_kl > args.target_kl:
break
y_pred, y_true = b_values.cpu().numpy(), b_returns.cpu().numpy()
var_y = np.var(y_true)
explained_var = np.nan if var_y == 0 else 1 - np.var(y_true - y_pred) / var_y
# TRY NOT TO MODIFY: record rewards for plotting purposes
writer.add_scalar("charts/learning_rate", optimizer.param_groups[0]["lr"], global_step)
writer.add_scalar("losses/value_loss", v_loss.item(), global_step)
writer.add_scalar("losses/policy_loss", pg_loss.item(), global_step)
writer.add_scalar("losses/entropy", entropy_loss.item(), global_step)
writer.add_scalar("losses/old_approx_kl", old_approx_kl.item(), global_step)
writer.add_scalar("losses/approx_kl", approx_kl.item(), global_step)
writer.add_scalar("losses/clipfrac", np.mean(clipfracs), global_step)
writer.add_scalar("losses/explained_variance", explained_var, global_step)
print("SPS:", int(global_step / (time.time() - start_time)))
writer.add_scalar("charts/SPS", int(global_step / (time.time() - start_time)), global_step)
envs.close()
writer.close()
# Create the evaluation environment
eval_env = gym.make(args.env_id)
package_to_hub(
repo_id=args.repo_id,
model=agent, # The model we want to save
hyperparameters=args,
eval_env=gym.make(args.env_id),
logs=f"runs/{run_name}",
)To be able to share your model with the community there are three more steps to follow:
1️⃣ (If it’s not already done) create an account to HF ➡ https://huggingface.co/join
2️⃣ Sign in and get your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) with write role
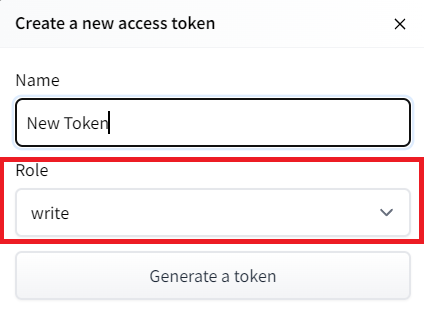
- Copy the token
- Run the cell below and paste the token
from huggingface_hub import notebook_login
notebook_login()
!git config --global credential.helper storeIf you don’t want to use Google Colab or a Jupyter Notebook, you need to use this command instead: huggingface-cli login
Let’s start the training 🔥
⚠️ ⚠️ ⚠️ Don’t use the same repo id with the one you used for the Unit 1
Now that you’ve coded PPO from scratch and added the Hugging Face Integration, we’re ready to start the training 🔥
First, you need to copy all your code to a file you create called
ppo.py
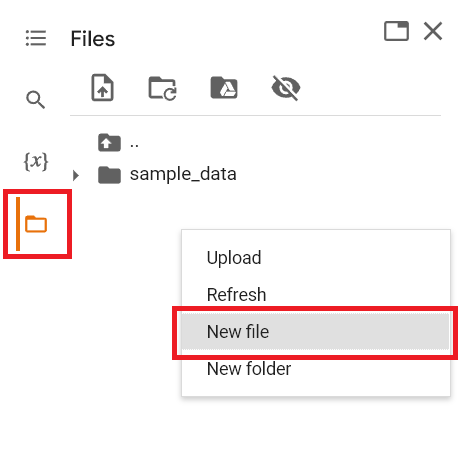
Now we just need to run this python script using
python <name-of-python-script>.pywith the additional parameters we defined usingargparseYou should modify more hyperparameters otherwise the training will not be super stable.
!python ppo.py --env-id="LunarLander-v2" --repo-id="YOUR_REPO_ID" --total-timesteps=50000Some additional challenges 🏆
The best way to learn is to try things on your own! Why not try another environment? Or why not trying to modify the implementation to work with Gymnasium?
See you in Unit 8, part 2 where we’re going to train agents to play Doom 🔥