Datasets:

license: apache-2.0
task_categories:
- visual-question-answering
language:
- en
tags:
- spatial-reasoning
- cross-viewpoint localization
pretty_name: ViewSpatial-Bench
size_categories:
- 1K<n<10K
configs:
- config_name: ViewSpatial-Bench
data_files:
- split: test
path: ViewSpatial-Bench.json
ViewSpatial-Bench: Evaluating Multi-perspective Spatial Localization in Vision-Language Models
Dataset Description
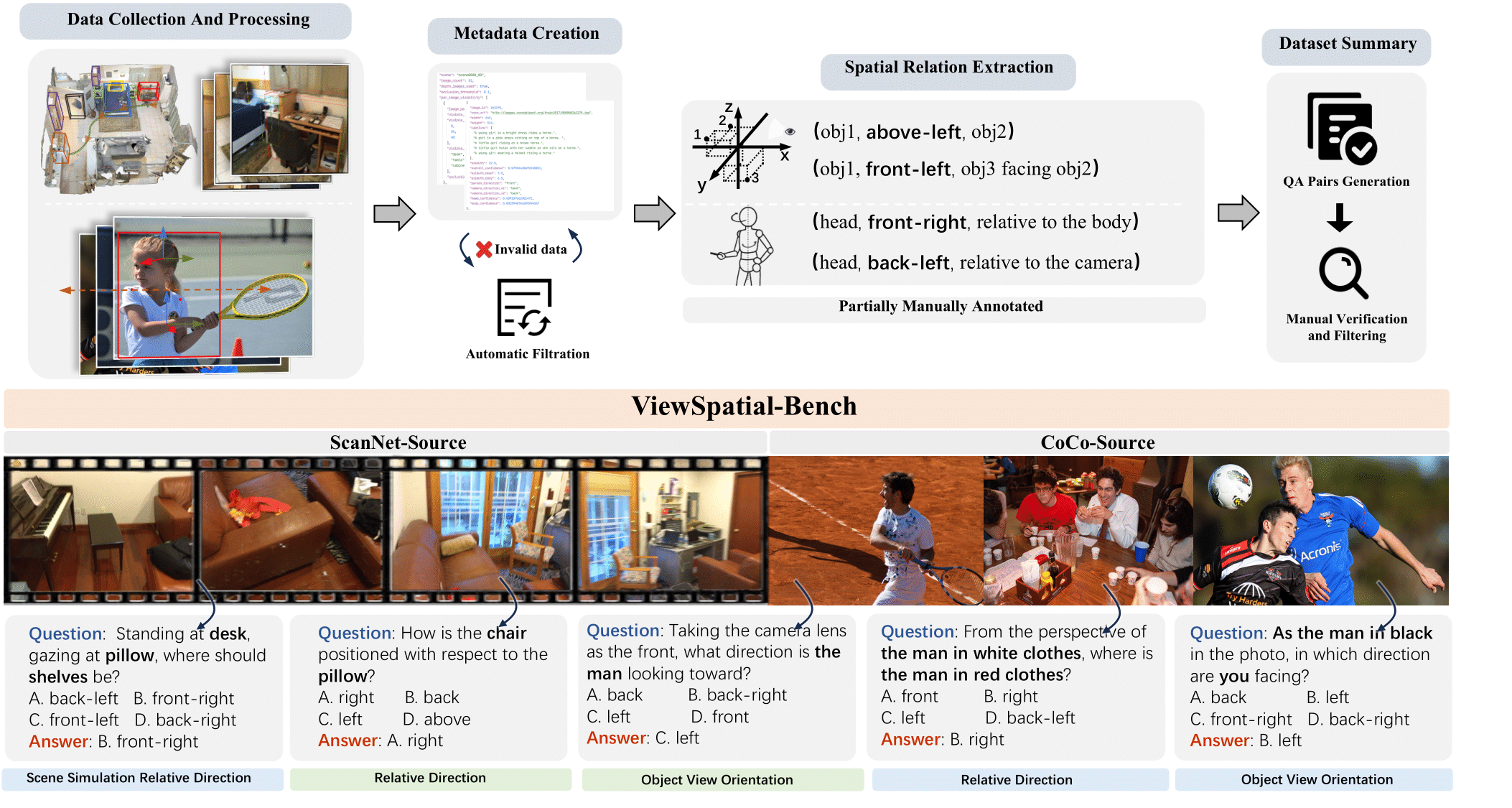
We introduce ViewSpatial-Bench, a comprehensive benchmark with over 5,700 question-answer pairs across 1,000+ 3D scenes from ScanNet and MS-COCO validation sets. This benchmark evaluates VLMs' spatial localization capabilities from multiple perspectives, specifically testing both egocentric (camera) and allocentric (human subject) viewpoints across five distinct task types.
ViewSpatial-Bench addresses a critical gap: while VLMs excel at spatial reasoning from their own perspective, they struggle with perspective-taking—adopting another entity's spatial frame of reference—which is essential for embodied interaction and multi-agent collaboration.The figure below shows the construction pipeline and example demonstrations of our benchmark.
The dataset contains the following fields:
| Field Name | Description |
|---|---|
question_type |
Type of spatial reasoning task, includes 5 distinct categories for evaluating different spatial capabilities |
image_path |
Path to the source image, includes data from two sources: scannetv2_val (ScanNet validation set) and val2017 (MS-COCO validation set) |
question |
The spatial reasoning question posed to the model |
answer |
The correct answer to the question |
choices |
Multiple choice options available for the question |
- Language(s) (NLP): en
- License: apache-2.0
Uses
I. With HuggingFace datasets library.
from datasets import load_dataset
ds = load_dataset("lidingm/ViewSpatial-Bench")
II. Evaluation using Open-Source Code.
Evaluate using our open-source evaluation code available on Github.(Coming Soon)
# Clone the repository
git clone https://github.com/lidingm/ViewSpatial-Bench.git
cd ViewSpatial-Bench
# Install dependencies
pip install -r requirements.txt
# Run evaluation
python evaluate.py --model_path your_model_path
You can configure the appropriate model parameters and evaluation settings according to the framework's requirements to obtain performance evaluation results on the ViewSpatial-Bench dataset.
Benchamrk
We provide benchmark results for various open-source models as well as GPT-4o and Gemini 2.0 Flash on our benchmark. More model evaluations will be added.
| Model | Camera-based Tasks | Person-based Tasks | Overall | |||||
|---|---|---|---|---|---|---|---|---|
| Rel. Dir. | Obj. Ori. | Avg. | Obj. Ori. | Rel. Dir. | Sce. Sim. | Avg. | ||
| InternVL2.5 (2B) | 38.52 | 22.59 | 32.79 | 47.09 | 40.02 | 25.70 | 37.04 | 34.98 |
| Qwen2.5-VL (3B) | 43.43 | 33.33 | 39.80 | 39.16 | 28.62 | 28.51 | 32.14 | 35.85 |
| Qwen2.5-VL (7B) | 46.64 | 29.72 | 40.56 | 37.05 | 35.04 | 28.78 | 33.37 | 36.85 |
| LLaVA-NeXT-Video (7B) | 26.34 | 19.28 | 23.80 | 44.68 | 38.60 | 29.05 | 37.07 | 30.64 |
| LLaVA-OneVision (7B) | 29.84 | 26.10 | 28.49 | 22.39 | 31.00 | 26.88 | 26.54 | 27.49 |
| InternVL2.5 (8B) | 49.41 | 41.27 | 46.48 | 46.79 | 42.04 | 32.85 | 40.20 | 43.24 |
| Llama-3.2-Vision (11B) | 25.27 | 20.98 | 23.73 | 51.20 | 32.19 | 18.82 | 33.61 | 28.82 |
| InternVL3 (14B) | 54.65 | 33.63 | 47.09 | 33.43 | 37.05 | 31.86 | 33.88 | 40.28 |
| Kimi-VL-Instruct (16B) | 26.85 | 22.09 | 25.14 | 63.05 | 43.94 | 20.27 | 41.52 | 33.58 |
| GPT-4o | 41.46 | 19.58 | 33.57 | 42.97 | 40.86 | 26.79 | 36.29 | 34.98 |
| Gemini 2.0 Flash | 45.29 | 12.95 | 33.66 | 41.16 | 32.78 | 21.90 | 31.53 | 32.56 |
| Random Baseline | 25.16 | 26.10 | 25.50 | 24.60 | 31.12 | 26.33 | 27.12 | 26.33 |
Citation
Coming Soon