

metadata
license: cc-by-nc-nd-4.0
LightwheelOcc
A 3D Occupancy Synthetic Dataset in Autonomous Driving

- Point of Contact: Lightwheel AI or Tianyu (李天羽)
Table of Contents
Introduction
- LightwheelOcc, developed by Lightwheel AI, is a publicly available autonomous driving synthetic dataset. The dataset, which includes 40,000 frames and corresponding ground truth labels for a variety of tasks, is a generalized dataset that navigates a variety of regional terrains, weather patterns, vehicle types, vegetation, and roadway demarcations.
- Lightwheel AI levers generative AI and simulation to deliver 3D, physically realistic and generalizable synthetic data solutions for autonomous driving and embodied AI. By publishing LightwheelOcc, we aim to advance research in the realms of computer vision, autonomous driving and synthetic data.
Highlights
Diverse data distributions, including corner cases and hard scenarios
- By incorporating complex traffic flows, LightwheelOcc contains diversified simulation of different traffic conditions and driving behaviors. Apart from usual scenarios, the dataset also presents corner cases like small and rare objects on the road, challenging conditions like nighttime and rainy scenes, etc. , enriching real-world data diversity.
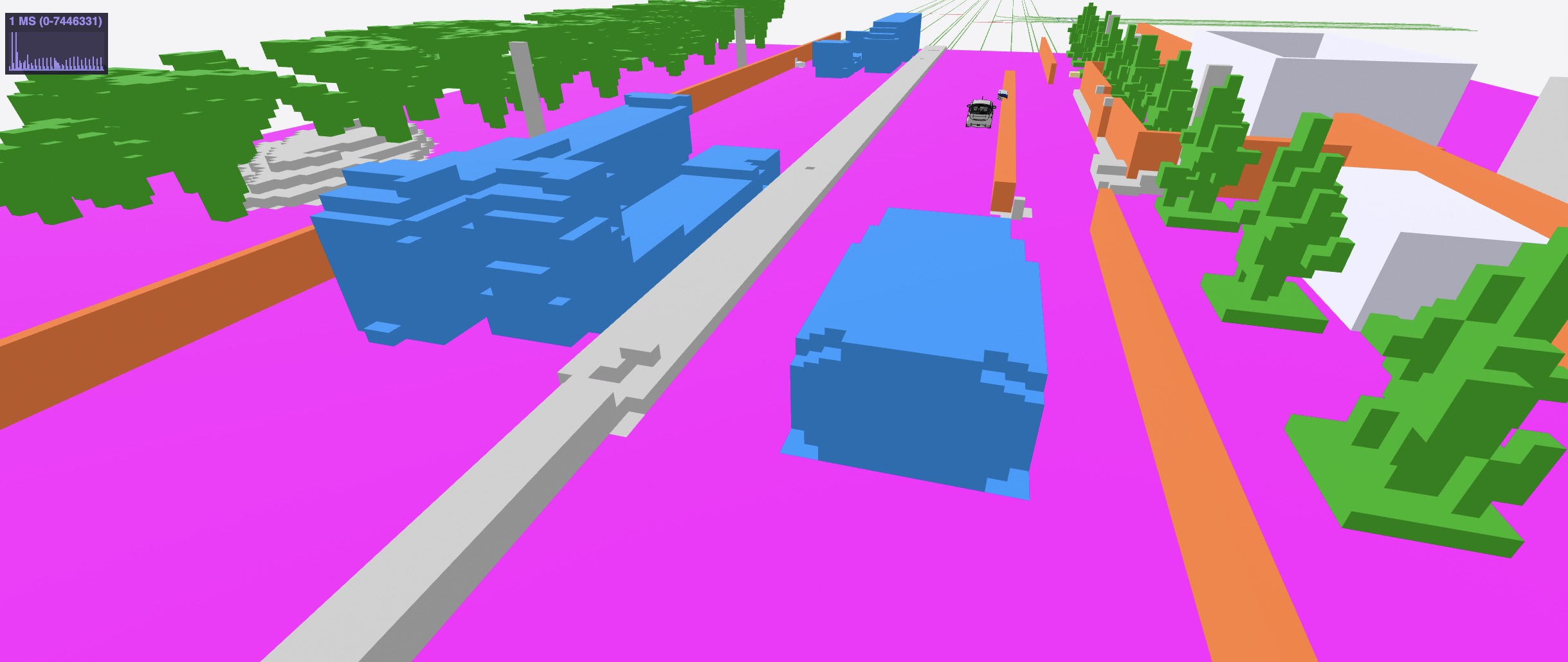
Accurate and dense 3D occupancy and depth label
Realistic sensor configuration simulating nuScenes dataset
Data overview
Basic Information
- The LightwheelOcc dataset contains 40,000 frames, totaling 240,000 images, of which 28,000 frames are used for training scenarios, 6000 frames are used for validation scenarios, and 6000 frames are used for testing scenarios.
- LightwheelOcc includes 6 camera sensor data, as well as labels for different tasks, including 3D Occupancy, Flow and Depth Map.
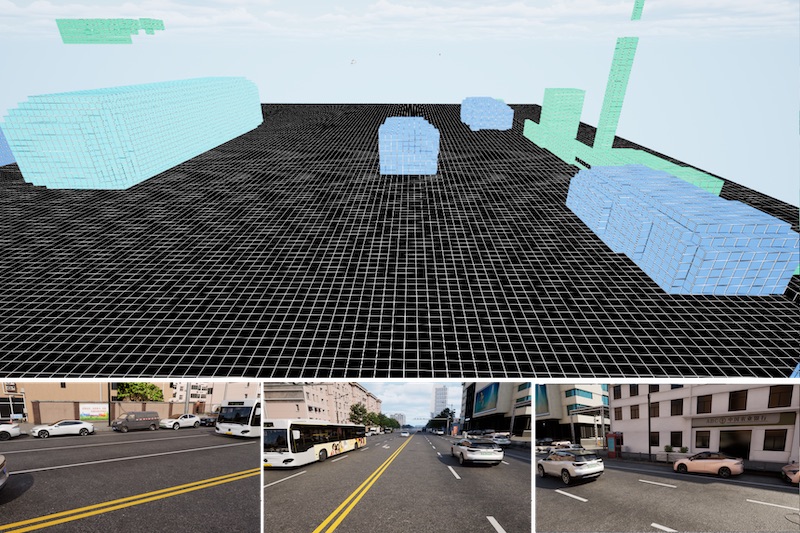
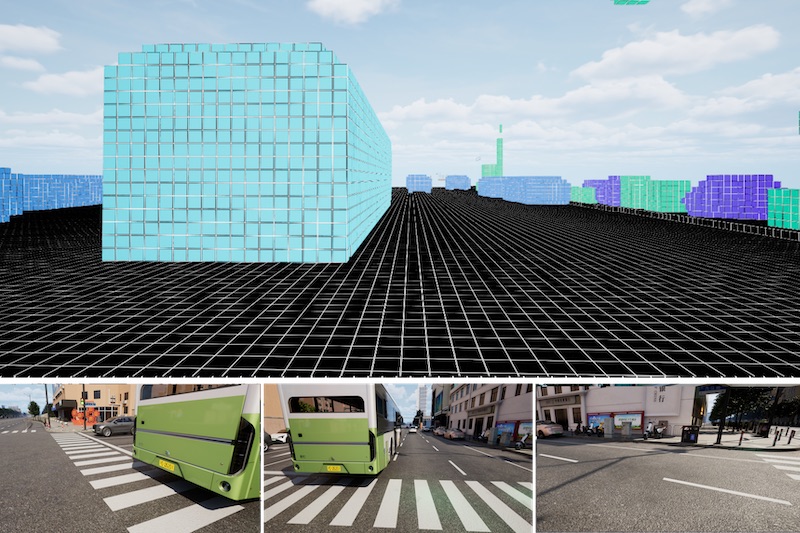
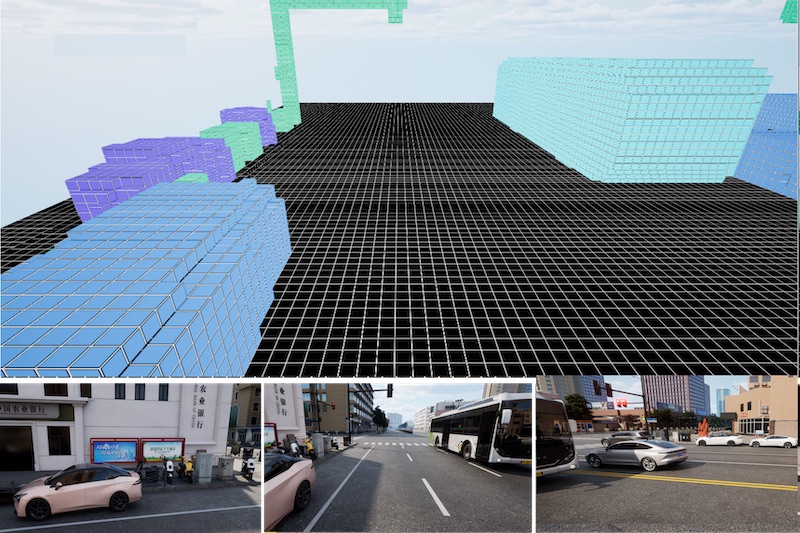
Data Sample
| 3D Occupancy | Depth Map |
|---|---|
 |
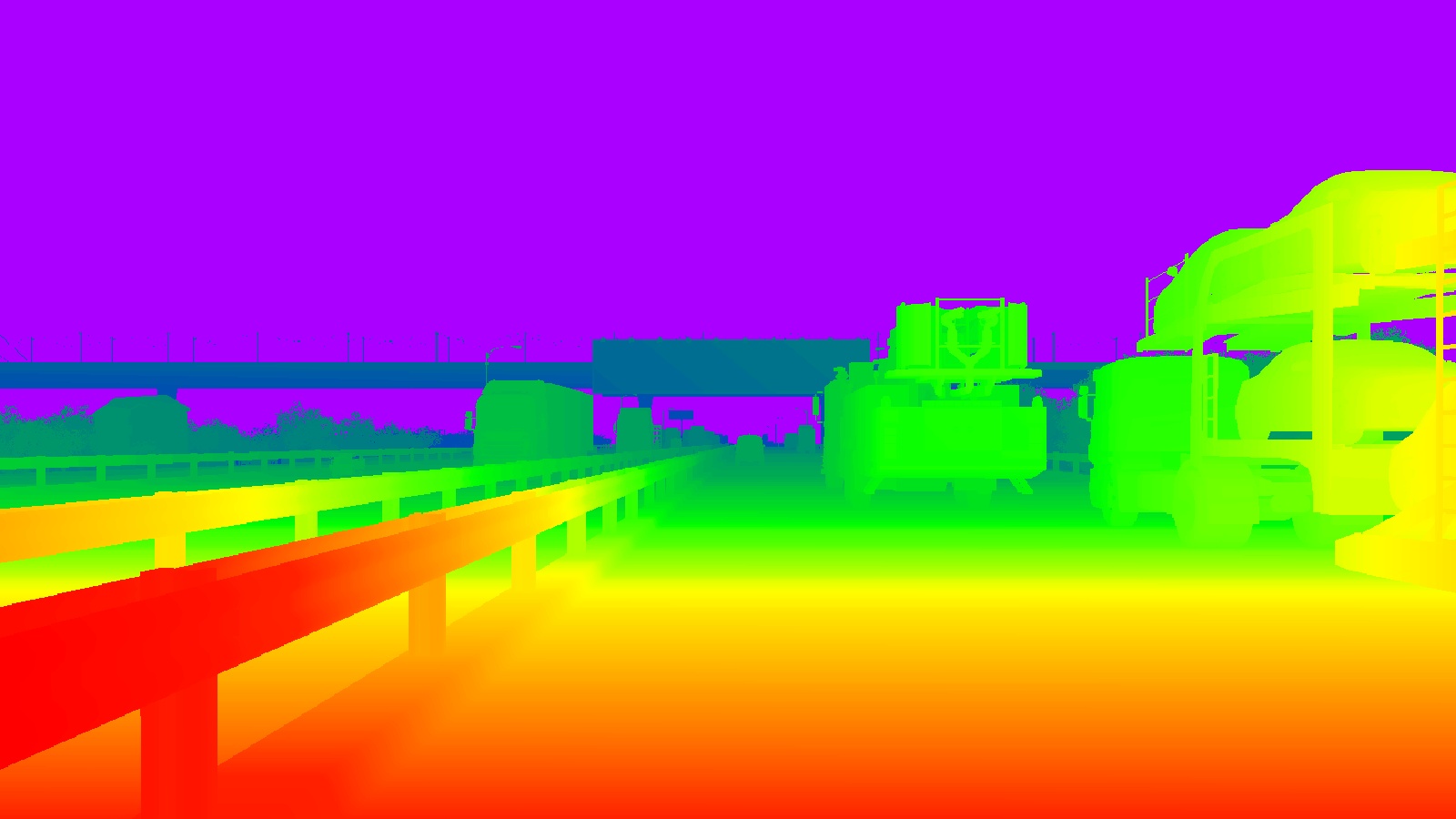 |