Spaces:
Running


Running
Vincentqyw
commited on
Commit
·
2673dcd
1
Parent(s):
45354a0
add: lightglue
Browse files- pre-requirements.txt +0 -3
- third_party/LightGlue/.gitattributes +1 -0
- third_party/LightGlue/.gitignore +10 -0
- third_party/LightGlue/LICENSE +201 -0
- third_party/LightGlue/README.md +134 -0
- third_party/LightGlue/assets/DSC_0410.JPG +0 -0
- third_party/LightGlue/assets/DSC_0411.JPG +0 -0
- third_party/LightGlue/assets/architecture.svg +0 -0
- third_party/LightGlue/assets/easy_hard.jpg +0 -0
- third_party/LightGlue/assets/sacre_coeur1.jpg +0 -0
- third_party/LightGlue/assets/sacre_coeur2.jpg +0 -0
- third_party/LightGlue/assets/teaser.svg +1499 -0
- third_party/LightGlue/demo.ipynb +0 -0
- third_party/LightGlue/lightglue/__init__.py +4 -0
- third_party/LightGlue/lightglue/disk.py +70 -0
- third_party/LightGlue/lightglue/lightglue.py +466 -0
- third_party/LightGlue/lightglue/superpoint.py +230 -0
- third_party/LightGlue/lightglue/utils.py +135 -0
- third_party/LightGlue/lightglue/viz2d.py +161 -0
- third_party/LightGlue/requirements.txt +6 -0
- third_party/LightGlue/setup.py +27 -0
pre-requirements.txt
CHANGED
|
@@ -1,4 +1,3 @@
|
|
| 1 |
-
# python>=3.10.4
|
| 2 |
torch>=1.12.1
|
| 3 |
torchvision>=0.13.1
|
| 4 |
torchmetrics>=0.6.0
|
|
@@ -9,5 +8,3 @@ einops>=0.3.0
|
|
| 9 |
kornia>=0.6
|
| 10 |
gradio
|
| 11 |
gradio_client==0.2.7
|
| 12 |
-
# datasets[vision]>=2.4.0
|
| 13 |
-
|
|
|
|
|
|
|
| 1 |
torch>=1.12.1
|
| 2 |
torchvision>=0.13.1
|
| 3 |
torchmetrics>=0.6.0
|
|
|
|
| 8 |
kornia>=0.6
|
| 9 |
gradio
|
| 10 |
gradio_client==0.2.7
|
|
|
|
|
|
third_party/LightGlue/.gitattributes
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
*.ipynb linguist-documentation
|
third_party/LightGlue/.gitignore
ADDED
|
@@ -0,0 +1,10 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
*.egg-info
|
| 2 |
+
*.pyc
|
| 3 |
+
/.idea/
|
| 4 |
+
/data/
|
| 5 |
+
/outputs/
|
| 6 |
+
__pycache__
|
| 7 |
+
/lightglue/weights/
|
| 8 |
+
lightglue/_flash/
|
| 9 |
+
*-checkpoint.ipynb
|
| 10 |
+
*.pth
|
third_party/LightGlue/LICENSE
ADDED
|
@@ -0,0 +1,201 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
Apache License
|
| 2 |
+
Version 2.0, January 2004
|
| 3 |
+
http://www.apache.org/licenses/
|
| 4 |
+
|
| 5 |
+
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
|
| 6 |
+
|
| 7 |
+
1. Definitions.
|
| 8 |
+
|
| 9 |
+
"License" shall mean the terms and conditions for use, reproduction,
|
| 10 |
+
and distribution as defined by Sections 1 through 9 of this document.
|
| 11 |
+
|
| 12 |
+
"Licensor" shall mean the copyright owner or entity authorized by
|
| 13 |
+
the copyright owner that is granting the License.
|
| 14 |
+
|
| 15 |
+
"Legal Entity" shall mean the union of the acting entity and all
|
| 16 |
+
other entities that control, are controlled by, or are under common
|
| 17 |
+
control with that entity. For the purposes of this definition,
|
| 18 |
+
"control" means (i) the power, direct or indirect, to cause the
|
| 19 |
+
direction or management of such entity, whether by contract or
|
| 20 |
+
otherwise, or (ii) ownership of fifty percent (50%) or more of the
|
| 21 |
+
outstanding shares, or (iii) beneficial ownership of such entity.
|
| 22 |
+
|
| 23 |
+
"You" (or "Your") shall mean an individual or Legal Entity
|
| 24 |
+
exercising permissions granted by this License.
|
| 25 |
+
|
| 26 |
+
"Source" form shall mean the preferred form for making modifications,
|
| 27 |
+
including but not limited to software source code, documentation
|
| 28 |
+
source, and configuration files.
|
| 29 |
+
|
| 30 |
+
"Object" form shall mean any form resulting from mechanical
|
| 31 |
+
transformation or translation of a Source form, including but
|
| 32 |
+
not limited to compiled object code, generated documentation,
|
| 33 |
+
and conversions to other media types.
|
| 34 |
+
|
| 35 |
+
"Work" shall mean the work of authorship, whether in Source or
|
| 36 |
+
Object form, made available under the License, as indicated by a
|
| 37 |
+
copyright notice that is included in or attached to the work
|
| 38 |
+
(an example is provided in the Appendix below).
|
| 39 |
+
|
| 40 |
+
"Derivative Works" shall mean any work, whether in Source or Object
|
| 41 |
+
form, that is based on (or derived from) the Work and for which the
|
| 42 |
+
editorial revisions, annotations, elaborations, or other modifications
|
| 43 |
+
represent, as a whole, an original work of authorship. For the purposes
|
| 44 |
+
of this License, Derivative Works shall not include works that remain
|
| 45 |
+
separable from, or merely link (or bind by name) to the interfaces of,
|
| 46 |
+
the Work and Derivative Works thereof.
|
| 47 |
+
|
| 48 |
+
"Contribution" shall mean any work of authorship, including
|
| 49 |
+
the original version of the Work and any modifications or additions
|
| 50 |
+
to that Work or Derivative Works thereof, that is intentionally
|
| 51 |
+
submitted to Licensor for inclusion in the Work by the copyright owner
|
| 52 |
+
or by an individual or Legal Entity authorized to submit on behalf of
|
| 53 |
+
the copyright owner. For the purposes of this definition, "submitted"
|
| 54 |
+
means any form of electronic, verbal, or written communication sent
|
| 55 |
+
to the Licensor or its representatives, including but not limited to
|
| 56 |
+
communication on electronic mailing lists, source code control systems,
|
| 57 |
+
and issue tracking systems that are managed by, or on behalf of, the
|
| 58 |
+
Licensor for the purpose of discussing and improving the Work, but
|
| 59 |
+
excluding communication that is conspicuously marked or otherwise
|
| 60 |
+
designated in writing by the copyright owner as "Not a Contribution."
|
| 61 |
+
|
| 62 |
+
"Contributor" shall mean Licensor and any individual or Legal Entity
|
| 63 |
+
on behalf of whom a Contribution has been received by Licensor and
|
| 64 |
+
subsequently incorporated within the Work.
|
| 65 |
+
|
| 66 |
+
2. Grant of Copyright License. Subject to the terms and conditions of
|
| 67 |
+
this License, each Contributor hereby grants to You a perpetual,
|
| 68 |
+
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
| 69 |
+
copyright license to reproduce, prepare Derivative Works of,
|
| 70 |
+
publicly display, publicly perform, sublicense, and distribute the
|
| 71 |
+
Work and such Derivative Works in Source or Object form.
|
| 72 |
+
|
| 73 |
+
3. Grant of Patent License. Subject to the terms and conditions of
|
| 74 |
+
this License, each Contributor hereby grants to You a perpetual,
|
| 75 |
+
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
| 76 |
+
(except as stated in this section) patent license to make, have made,
|
| 77 |
+
use, offer to sell, sell, import, and otherwise transfer the Work,
|
| 78 |
+
where such license applies only to those patent claims licensable
|
| 79 |
+
by such Contributor that are necessarily infringed by their
|
| 80 |
+
Contribution(s) alone or by combination of their Contribution(s)
|
| 81 |
+
with the Work to which such Contribution(s) was submitted. If You
|
| 82 |
+
institute patent litigation against any entity (including a
|
| 83 |
+
cross-claim or counterclaim in a lawsuit) alleging that the Work
|
| 84 |
+
or a Contribution incorporated within the Work constitutes direct
|
| 85 |
+
or contributory patent infringement, then any patent licenses
|
| 86 |
+
granted to You under this License for that Work shall terminate
|
| 87 |
+
as of the date such litigation is filed.
|
| 88 |
+
|
| 89 |
+
4. Redistribution. You may reproduce and distribute copies of the
|
| 90 |
+
Work or Derivative Works thereof in any medium, with or without
|
| 91 |
+
modifications, and in Source or Object form, provided that You
|
| 92 |
+
meet the following conditions:
|
| 93 |
+
|
| 94 |
+
(a) You must give any other recipients of the Work or
|
| 95 |
+
Derivative Works a copy of this License; and
|
| 96 |
+
|
| 97 |
+
(b) You must cause any modified files to carry prominent notices
|
| 98 |
+
stating that You changed the files; and
|
| 99 |
+
|
| 100 |
+
(c) You must retain, in the Source form of any Derivative Works
|
| 101 |
+
that You distribute, all copyright, patent, trademark, and
|
| 102 |
+
attribution notices from the Source form of the Work,
|
| 103 |
+
excluding those notices that do not pertain to any part of
|
| 104 |
+
the Derivative Works; and
|
| 105 |
+
|
| 106 |
+
(d) If the Work includes a "NOTICE" text file as part of its
|
| 107 |
+
distribution, then any Derivative Works that You distribute must
|
| 108 |
+
include a readable copy of the attribution notices contained
|
| 109 |
+
within such NOTICE file, excluding those notices that do not
|
| 110 |
+
pertain to any part of the Derivative Works, in at least one
|
| 111 |
+
of the following places: within a NOTICE text file distributed
|
| 112 |
+
as part of the Derivative Works; within the Source form or
|
| 113 |
+
documentation, if provided along with the Derivative Works; or,
|
| 114 |
+
within a display generated by the Derivative Works, if and
|
| 115 |
+
wherever such third-party notices normally appear. The contents
|
| 116 |
+
of the NOTICE file are for informational purposes only and
|
| 117 |
+
do not modify the License. You may add Your own attribution
|
| 118 |
+
notices within Derivative Works that You distribute, alongside
|
| 119 |
+
or as an addendum to the NOTICE text from the Work, provided
|
| 120 |
+
that such additional attribution notices cannot be construed
|
| 121 |
+
as modifying the License.
|
| 122 |
+
|
| 123 |
+
You may add Your own copyright statement to Your modifications and
|
| 124 |
+
may provide additional or different license terms and conditions
|
| 125 |
+
for use, reproduction, or distribution of Your modifications, or
|
| 126 |
+
for any such Derivative Works as a whole, provided Your use,
|
| 127 |
+
reproduction, and distribution of the Work otherwise complies with
|
| 128 |
+
the conditions stated in this License.
|
| 129 |
+
|
| 130 |
+
5. Submission of Contributions. Unless You explicitly state otherwise,
|
| 131 |
+
any Contribution intentionally submitted for inclusion in the Work
|
| 132 |
+
by You to the Licensor shall be under the terms and conditions of
|
| 133 |
+
this License, without any additional terms or conditions.
|
| 134 |
+
Notwithstanding the above, nothing herein shall supersede or modify
|
| 135 |
+
the terms of any separate license agreement you may have executed
|
| 136 |
+
with Licensor regarding such Contributions.
|
| 137 |
+
|
| 138 |
+
6. Trademarks. This License does not grant permission to use the trade
|
| 139 |
+
names, trademarks, service marks, or product names of the Licensor,
|
| 140 |
+
except as required for reasonable and customary use in describing the
|
| 141 |
+
origin of the Work and reproducing the content of the NOTICE file.
|
| 142 |
+
|
| 143 |
+
7. Disclaimer of Warranty. Unless required by applicable law or
|
| 144 |
+
agreed to in writing, Licensor provides the Work (and each
|
| 145 |
+
Contributor provides its Contributions) on an "AS IS" BASIS,
|
| 146 |
+
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
|
| 147 |
+
implied, including, without limitation, any warranties or conditions
|
| 148 |
+
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
|
| 149 |
+
PARTICULAR PURPOSE. You are solely responsible for determining the
|
| 150 |
+
appropriateness of using or redistributing the Work and assume any
|
| 151 |
+
risks associated with Your exercise of permissions under this License.
|
| 152 |
+
|
| 153 |
+
8. Limitation of Liability. In no event and under no legal theory,
|
| 154 |
+
whether in tort (including negligence), contract, or otherwise,
|
| 155 |
+
unless required by applicable law (such as deliberate and grossly
|
| 156 |
+
negligent acts) or agreed to in writing, shall any Contributor be
|
| 157 |
+
liable to You for damages, including any direct, indirect, special,
|
| 158 |
+
incidental, or consequential damages of any character arising as a
|
| 159 |
+
result of this License or out of the use or inability to use the
|
| 160 |
+
Work (including but not limited to damages for loss of goodwill,
|
| 161 |
+
work stoppage, computer failure or malfunction, or any and all
|
| 162 |
+
other commercial damages or losses), even if such Contributor
|
| 163 |
+
has been advised of the possibility of such damages.
|
| 164 |
+
|
| 165 |
+
9. Accepting Warranty or Additional Liability. While redistributing
|
| 166 |
+
the Work or Derivative Works thereof, You may choose to offer,
|
| 167 |
+
and charge a fee for, acceptance of support, warranty, indemnity,
|
| 168 |
+
or other liability obligations and/or rights consistent with this
|
| 169 |
+
License. However, in accepting such obligations, You may act only
|
| 170 |
+
on Your own behalf and on Your sole responsibility, not on behalf
|
| 171 |
+
of any other Contributor, and only if You agree to indemnify,
|
| 172 |
+
defend, and hold each Contributor harmless for any liability
|
| 173 |
+
incurred by, or claims asserted against, such Contributor by reason
|
| 174 |
+
of your accepting any such warranty or additional liability.
|
| 175 |
+
|
| 176 |
+
END OF TERMS AND CONDITIONS
|
| 177 |
+
|
| 178 |
+
APPENDIX: How to apply the Apache License to your work.
|
| 179 |
+
|
| 180 |
+
To apply the Apache License to your work, attach the following
|
| 181 |
+
boilerplate notice, with the fields enclosed by brackets "[]"
|
| 182 |
+
replaced with your own identifying information. (Don't include
|
| 183 |
+
the brackets!) The text should be enclosed in the appropriate
|
| 184 |
+
comment syntax for the file format. We also recommend that a
|
| 185 |
+
file or class name and description of purpose be included on the
|
| 186 |
+
same "printed page" as the copyright notice for easier
|
| 187 |
+
identification within third-party archives.
|
| 188 |
+
|
| 189 |
+
Copyright [yyyy] [name of copyright owner]
|
| 190 |
+
|
| 191 |
+
Licensed under the Apache License, Version 2.0 (the "License");
|
| 192 |
+
you may not use this file except in compliance with the License.
|
| 193 |
+
You may obtain a copy of the License at
|
| 194 |
+
|
| 195 |
+
http://www.apache.org/licenses/LICENSE-2.0
|
| 196 |
+
|
| 197 |
+
Unless required by applicable law or agreed to in writing, software
|
| 198 |
+
distributed under the License is distributed on an "AS IS" BASIS,
|
| 199 |
+
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
| 200 |
+
See the License for the specific language governing permissions and
|
| 201 |
+
limitations under the License.
|
third_party/LightGlue/README.md
ADDED
|
@@ -0,0 +1,134 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
<p align="center">
|
| 2 |
+
<h1 align="center"><ins>LightGlue ⚡️</ins><br>Local Feature Matching at Light Speed</h1>
|
| 3 |
+
<p align="center">
|
| 4 |
+
<a href="https://www.linkedin.com/in/philipplindenberger/">Philipp Lindenberger</a>
|
| 5 |
+
·
|
| 6 |
+
<a href="https://psarlin.com/">Paul-Edouard Sarlin</a>
|
| 7 |
+
·
|
| 8 |
+
<a href="https://www.microsoft.com/en-us/research/people/mapoll/">Marc Pollefeys</a>
|
| 9 |
+
</p>
|
| 10 |
+
<!-- <p align="center">
|
| 11 |
+
<img src="assets/larchitecture.svg" alt="Logo" height="40">
|
| 12 |
+
</p> -->
|
| 13 |
+
<!-- <h2 align="center">PrePrint 2023</h2> -->
|
| 14 |
+
<h2 align="center"><p>
|
| 15 |
+
<a href="https://arxiv.org/pdf/2306.13643.pdf" align="center">Paper</a> |
|
| 16 |
+
<a href="https://colab.research.google.com/github/cvg/LightGlue/blob/main/demo.ipynb" align="center">Colab</a>
|
| 17 |
+
</p></h2>
|
| 18 |
+
<div align="center"></div>
|
| 19 |
+
</p>
|
| 20 |
+
<p align="center">
|
| 21 |
+
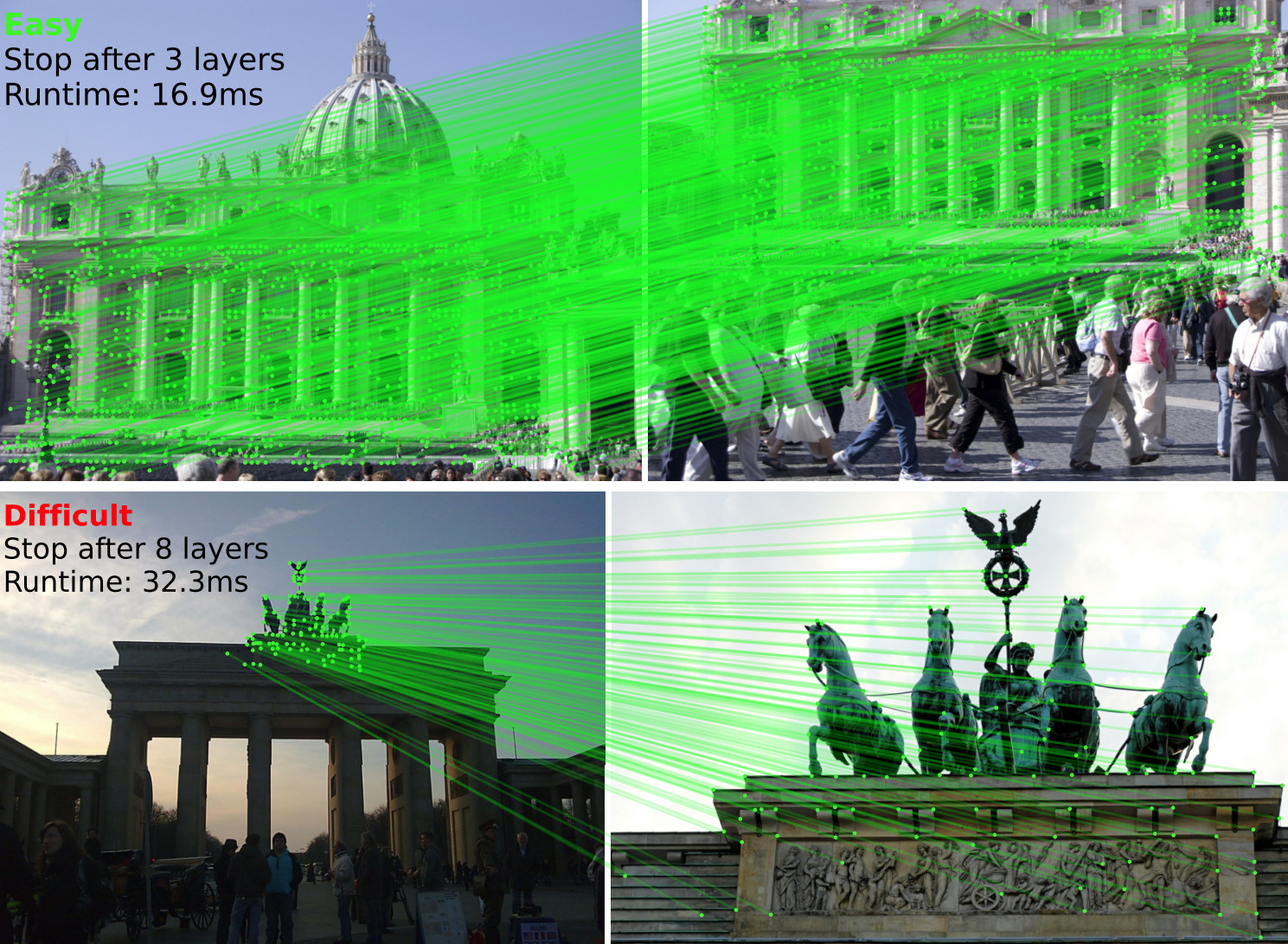
<a href="https://arxiv.org/abs/2306.13643"><img src="assets/easy_hard.jpg" alt="example" width=80%></a>
|
| 22 |
+
<br>
|
| 23 |
+
<em>LightGlue is a deep neural network that matches sparse local features across image pairs.<br>An adaptive mechanism makes it fast for easy pairs (top) and reduces the computational complexity for difficult ones (bottom).</em>
|
| 24 |
+
</p>
|
| 25 |
+
|
| 26 |
+
##
|
| 27 |
+
|
| 28 |
+
This repository hosts the inference code of LightGlue, a lightweight feature matcher with high accuracy and blazing fast inference. It takes as input a set of keypoints and descriptors for each image and returns the indices of corresponding points. The architecture is based on adaptive pruning techniques, in both network width and depth - [check out the paper for more details](https://arxiv.org/pdf/2306.13643.pdf).
|
| 29 |
+
|
| 30 |
+
We release pretrained weights of LightGlue with [SuperPoint](https://arxiv.org/abs/1712.07629) and [DISK](https://arxiv.org/abs/2006.13566) local features.
|
| 31 |
+
The training end evaluation code will be released in July in a separate repo. To be notified, subscribe to [issue #6](https://github.com/cvg/LightGlue/issues/6).
|
| 32 |
+
|
| 33 |
+
## Installation and demo [](https://colab.research.google.com/github/cvg/LightGlue/blob/main/demo.ipynb)
|
| 34 |
+
|
| 35 |
+
Install this repo using pip:
|
| 36 |
+
|
| 37 |
+
```bash
|
| 38 |
+
git clone https://github.com/cvg/LightGlue.git && cd LightGlue
|
| 39 |
+
python -m pip install -e .
|
| 40 |
+
```
|
| 41 |
+
|
| 42 |
+
We provide a [demo notebook](demo.ipynb) which shows how to perform feature extraction and matching on an image pair.
|
| 43 |
+
|
| 44 |
+
Here is a minimal script to match two images:
|
| 45 |
+
|
| 46 |
+
```python
|
| 47 |
+
from lightglue import LightGlue, SuperPoint, DISK
|
| 48 |
+
from lightglue.utils import load_image, rbd
|
| 49 |
+
|
| 50 |
+
# SuperPoint+LightGlue
|
| 51 |
+
extractor = SuperPoint(max_num_keypoints=2048).eval().cuda() # load the extractor
|
| 52 |
+
matcher = LightGlue(features='superpoint').eval().cuda() # load the matcher
|
| 53 |
+
|
| 54 |
+
# or DISK+LightGlue
|
| 55 |
+
extractor = DISK(max_num_keypoints=2048).eval().cuda() # load the extractor
|
| 56 |
+
matcher = LightGlue(features='disk').eval().cuda() # load the matcher
|
| 57 |
+
|
| 58 |
+
# load each image as a torch.Tensor on GPU with shape (3,H,W), normalized in [0,1]
|
| 59 |
+
image0 = load_image('path/to/image_0.jpg').cuda()
|
| 60 |
+
image1 = load_image('path/to/image_1.jpg').cuda()
|
| 61 |
+
|
| 62 |
+
# extract local features
|
| 63 |
+
feats0 = extractor.extract(image0) # auto-resize the image, disable with resize=None
|
| 64 |
+
feats1 = extractor.extract(image1)
|
| 65 |
+
|
| 66 |
+
# match the features
|
| 67 |
+
matches01 = matcher({'image0': feats0, 'image1': feats1})
|
| 68 |
+
feats0, feats1, matches01 = [rbd(x) for x in [feats0, feats1, matches01]] # remove batch dimension
|
| 69 |
+
matches = matches01['matches'] # indices with shape (K,2)
|
| 70 |
+
points0 = feats0['keypoints'][matches[..., 0]] # coordinates in image #0, shape (K,2)
|
| 71 |
+
points1 = feats1['keypoints'][matches[..., 1]] # coordinates in image #1, shape (K,2)
|
| 72 |
+
```
|
| 73 |
+
|
| 74 |
+
We also provide a convenience method to match a pair of images:
|
| 75 |
+
|
| 76 |
+
```python
|
| 77 |
+
from lightglue import match_pair
|
| 78 |
+
feats0, feats1, matches01 = match_pair(extractor, matcher, image0, image1)
|
| 79 |
+
```
|
| 80 |
+
|
| 81 |
+
##
|
| 82 |
+
|
| 83 |
+
<p align="center">
|
| 84 |
+
<a href="https://arxiv.org/abs/2306.13643"><img src="assets/teaser.svg" alt="Logo" width=50%></a>
|
| 85 |
+
<br>
|
| 86 |
+
<em>LightGlue can adjust its depth (number of layers) and width (number of keypoints) per image pair, with a marginal impact on accuracy.</em>
|
| 87 |
+
</p>
|
| 88 |
+
|
| 89 |
+
## Advanced configuration
|
| 90 |
+
|
| 91 |
+
The default values give a good trade-off between speed and accuracy. To maximize the accuracy, use all keypoints and disable the adaptive mechanisms:
|
| 92 |
+
```python
|
| 93 |
+
extractor = SuperPoint(max_num_keypoints=None)
|
| 94 |
+
matcher = LightGlue(features='superpoint', depth_confidence=-1, width_confidence=-1)
|
| 95 |
+
```
|
| 96 |
+
|
| 97 |
+
To increase the speed with a small drop of accuracy, decrease the number of keypoints and lower the adaptive thresholds:
|
| 98 |
+
```python
|
| 99 |
+
extractor = SuperPoint(max_num_keypoints=1024)
|
| 100 |
+
matcher = LightGlue(features='superpoint', depth_confidence=0.9, width_confidence=0.95)
|
| 101 |
+
```
|
| 102 |
+
The maximum speed is obtained with [FlashAttention](https://arxiv.org/abs/2205.14135), which is automatically used when ```torch >= 2.0``` or if it is [installed from source](https://github.com/HazyResearch/flash-attention#installation-and-features).
|
| 103 |
+
|
| 104 |
+
<details>
|
| 105 |
+
<summary>[Detail of all parameters - click to expand]</summary>
|
| 106 |
+
|
| 107 |
+
- [```n_layers```](https://github.com/cvg/LightGlue/blob/main/lightglue/lightglue.py#L261): Number of stacked self+cross attention layers. Reduce this value for faster inference at the cost of accuracy (continuous red line in the plot above). Default: 9 (all layers).
|
| 108 |
+
- [```flash```](https://github.com/cvg/LightGlue/blob/main/lightglue/lightglue.py#L263): Enable FlashAttention. Significantly increases the speed and reduces the memory consumption without any impact on accuracy. Default: True (LightGlue automatically detects if FlashAttention is available).
|
| 109 |
+
- [```mp```](https://github.com/cvg/LightGlue/blob/main/lightglue/lightglue.py#L264): Enable mixed precision inference. Default: False (off)
|
| 110 |
+
- [```depth_confidence```](https://github.com/cvg/LightGlue/blob/main/lightglue/lightglue.py#L265): Controls the early stopping. A lower values stops more often at earlier layers. Default: 0.95, disable with -1.
|
| 111 |
+
- [```width_confidence```](https://github.com/cvg/LightGlue/blob/main/lightglue/lightglue.py#L266): Controls the iterative point pruning. A lower value prunes more points earlier. Default: 0.99, disable with -1.
|
| 112 |
+
- [```filter_threshold```](https://github.com/cvg/LightGlue/blob/main/lightglue/lightglue.py#L267): Match confidence. Increase this value to obtain less, but stronger matches. Default: 0.1
|
| 113 |
+
|
| 114 |
+
</details>
|
| 115 |
+
|
| 116 |
+
## Other links
|
| 117 |
+
- [hloc - the visual localization toolbox](https://github.com/cvg/Hierarchical-Localization/): run LightGlue for Structure-from-Motion and visual localization.
|
| 118 |
+
- [LightGlue-ONNX](https://github.com/fabio-sim/LightGlue-ONNX): export LightGlue to the Open Neural Network Exchange format.
|
| 119 |
+
- [Image Matching WebUI](https://github.com/Vincentqyw/image-matching-webui): a web GUI to easily compare different matchers, including LightGlue.
|
| 120 |
+
- [kornia](kornia.readthedocs.io/) now exposes LightGlue via the interfaces [`LightGlue`](https://kornia.readthedocs.io/en/latest/feature.html#kornia.feature.LightGlue) and [`LightGlueMatcher`](https://kornia.readthedocs.io/en/latest/feature.html#kornia.feature.LightGlueMatcher).
|
| 121 |
+
|
| 122 |
+
## BibTeX Citation
|
| 123 |
+
If you use any ideas from the paper or code from this repo, please consider citing:
|
| 124 |
+
|
| 125 |
+
```txt
|
| 126 |
+
@inproceedings{lindenberger23lightglue,
|
| 127 |
+
author = {Philipp Lindenberger and
|
| 128 |
+
Paul-Edouard Sarlin and
|
| 129 |
+
Marc Pollefeys},
|
| 130 |
+
title = {{LightGlue: Local Feature Matching at Light Speed}},
|
| 131 |
+
booktitle = {ICCV},
|
| 132 |
+
year = {2023}
|
| 133 |
+
}
|
| 134 |
+
```
|
third_party/LightGlue/assets/DSC_0410.JPG
ADDED

|
third_party/LightGlue/assets/DSC_0411.JPG
ADDED

|
third_party/LightGlue/assets/architecture.svg
ADDED

|
third_party/LightGlue/assets/easy_hard.jpg
ADDED
|
third_party/LightGlue/assets/sacre_coeur1.jpg
ADDED

|
third_party/LightGlue/assets/sacre_coeur2.jpg
ADDED

|
third_party/LightGlue/assets/teaser.svg
ADDED

|
third_party/LightGlue/demo.ipynb
ADDED
|
The diff for this file is too large to render.
See raw diff
|
|
|
third_party/LightGlue/lightglue/__init__.py
ADDED
|
@@ -0,0 +1,4 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from .lightglue import LightGlue
|
| 2 |
+
from .superpoint import SuperPoint
|
| 3 |
+
from .disk import DISK
|
| 4 |
+
from .utils import match_pair
|
third_party/LightGlue/lightglue/disk.py
ADDED
|
@@ -0,0 +1,70 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import torch
|
| 2 |
+
import torch.nn as nn
|
| 3 |
+
import kornia
|
| 4 |
+
from types import SimpleNamespace
|
| 5 |
+
from .utils import ImagePreprocessor
|
| 6 |
+
|
| 7 |
+
|
| 8 |
+
class DISK(nn.Module):
|
| 9 |
+
default_conf = {
|
| 10 |
+
'weights': 'depth',
|
| 11 |
+
'max_num_keypoints': None,
|
| 12 |
+
'desc_dim': 128,
|
| 13 |
+
'nms_window_size': 5,
|
| 14 |
+
'detection_threshold': 0.0,
|
| 15 |
+
'pad_if_not_divisible': True,
|
| 16 |
+
}
|
| 17 |
+
|
| 18 |
+
preprocess_conf = {
|
| 19 |
+
**ImagePreprocessor.default_conf,
|
| 20 |
+
'resize': 1024,
|
| 21 |
+
'grayscale': False,
|
| 22 |
+
}
|
| 23 |
+
|
| 24 |
+
required_data_keys = ['image']
|
| 25 |
+
|
| 26 |
+
def __init__(self, **conf) -> None:
|
| 27 |
+
super().__init__()
|
| 28 |
+
self.conf = {**self.default_conf, **conf}
|
| 29 |
+
self.conf = SimpleNamespace(**self.conf)
|
| 30 |
+
self.model = kornia.feature.DISK.from_pretrained(self.conf.weights)
|
| 31 |
+
|
| 32 |
+
def forward(self, data: dict) -> dict:
|
| 33 |
+
""" Compute keypoints, scores, descriptors for image """
|
| 34 |
+
for key in self.required_data_keys:
|
| 35 |
+
assert key in data, f'Missing key {key} in data'
|
| 36 |
+
image = data['image']
|
| 37 |
+
features = self.model(
|
| 38 |
+
image,
|
| 39 |
+
n=self.conf.max_num_keypoints,
|
| 40 |
+
window_size=self.conf.nms_window_size,
|
| 41 |
+
score_threshold=self.conf.detection_threshold,
|
| 42 |
+
pad_if_not_divisible=self.conf.pad_if_not_divisible
|
| 43 |
+
)
|
| 44 |
+
keypoints = [f.keypoints for f in features]
|
| 45 |
+
scores = [f.detection_scores for f in features]
|
| 46 |
+
descriptors = [f.descriptors for f in features]
|
| 47 |
+
del features
|
| 48 |
+
|
| 49 |
+
keypoints = torch.stack(keypoints, 0)
|
| 50 |
+
scores = torch.stack(scores, 0)
|
| 51 |
+
descriptors = torch.stack(descriptors, 0)
|
| 52 |
+
|
| 53 |
+
return {
|
| 54 |
+
'keypoints': keypoints.to(image),
|
| 55 |
+
'keypoint_scores': scores.to(image),
|
| 56 |
+
'descriptors': descriptors.to(image),
|
| 57 |
+
}
|
| 58 |
+
|
| 59 |
+
def extract(self, img: torch.Tensor, **conf) -> dict:
|
| 60 |
+
""" Perform extraction with online resizing"""
|
| 61 |
+
if img.dim() == 3:
|
| 62 |
+
img = img[None] # add batch dim
|
| 63 |
+
assert img.dim() == 4 and img.shape[0] == 1
|
| 64 |
+
shape = img.shape[-2:][::-1]
|
| 65 |
+
img, scales = ImagePreprocessor(
|
| 66 |
+
**{**self.preprocess_conf, **conf})(img)
|
| 67 |
+
feats = self.forward({'image': img})
|
| 68 |
+
feats['image_size'] = torch.tensor(shape)[None].to(img).float()
|
| 69 |
+
feats['keypoints'] = (feats['keypoints'] + .5) / scales[None] - .5
|
| 70 |
+
return feats
|
third_party/LightGlue/lightglue/lightglue.py
ADDED
|
@@ -0,0 +1,466 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from pathlib import Path
|
| 2 |
+
from types import SimpleNamespace
|
| 3 |
+
import warnings
|
| 4 |
+
import numpy as np
|
| 5 |
+
import torch
|
| 6 |
+
from torch import nn
|
| 7 |
+
import torch.nn.functional as F
|
| 8 |
+
from typing import Optional, List, Callable
|
| 9 |
+
|
| 10 |
+
try:
|
| 11 |
+
from flash_attn.modules.mha import FlashCrossAttention
|
| 12 |
+
except ModuleNotFoundError:
|
| 13 |
+
FlashCrossAttention = None
|
| 14 |
+
|
| 15 |
+
if FlashCrossAttention or hasattr(F, 'scaled_dot_product_attention'):
|
| 16 |
+
FLASH_AVAILABLE = True
|
| 17 |
+
else:
|
| 18 |
+
FLASH_AVAILABLE = False
|
| 19 |
+
|
| 20 |
+
torch.backends.cudnn.deterministic = True
|
| 21 |
+
|
| 22 |
+
|
| 23 |
+
@torch.cuda.amp.custom_fwd(cast_inputs=torch.float32)
|
| 24 |
+
def normalize_keypoints(
|
| 25 |
+
kpts: torch.Tensor,
|
| 26 |
+
size: torch.Tensor) -> torch.Tensor:
|
| 27 |
+
if isinstance(size, torch.Size):
|
| 28 |
+
size = torch.tensor(size)[None]
|
| 29 |
+
shift = size.float().to(kpts) / 2
|
| 30 |
+
scale = size.max(1).values.float().to(kpts) / 2
|
| 31 |
+
kpts = (kpts - shift[:, None]) / scale[:, None, None]
|
| 32 |
+
return kpts
|
| 33 |
+
|
| 34 |
+
|
| 35 |
+
def rotate_half(x: torch.Tensor) -> torch.Tensor:
|
| 36 |
+
x = x.unflatten(-1, (-1, 2))
|
| 37 |
+
x1, x2 = x.unbind(dim=-1)
|
| 38 |
+
return torch.stack((-x2, x1), dim=-1).flatten(start_dim=-2)
|
| 39 |
+
|
| 40 |
+
|
| 41 |
+
def apply_cached_rotary_emb(
|
| 42 |
+
freqs: torch.Tensor, t: torch.Tensor) -> torch.Tensor:
|
| 43 |
+
return (t * freqs[0]) + (rotate_half(t) * freqs[1])
|
| 44 |
+
|
| 45 |
+
|
| 46 |
+
class LearnableFourierPositionalEncoding(nn.Module):
|
| 47 |
+
def __init__(self, M: int, dim: int, F_dim: int = None,
|
| 48 |
+
gamma: float = 1.0) -> None:
|
| 49 |
+
super().__init__()
|
| 50 |
+
F_dim = F_dim if F_dim is not None else dim
|
| 51 |
+
self.gamma = gamma
|
| 52 |
+
self.Wr = nn.Linear(M, F_dim // 2, bias=False)
|
| 53 |
+
nn.init.normal_(self.Wr.weight.data, mean=0, std=self.gamma ** -2)
|
| 54 |
+
|
| 55 |
+
def forward(self, x: torch.Tensor) -> torch.Tensor:
|
| 56 |
+
""" encode position vector """
|
| 57 |
+
projected = self.Wr(x)
|
| 58 |
+
cosines, sines = torch.cos(projected), torch.sin(projected)
|
| 59 |
+
emb = torch.stack([cosines, sines], 0).unsqueeze(-3)
|
| 60 |
+
return emb.repeat_interleave(2, dim=-1)
|
| 61 |
+
|
| 62 |
+
|
| 63 |
+
class TokenConfidence(nn.Module):
|
| 64 |
+
def __init__(self, dim: int) -> None:
|
| 65 |
+
super().__init__()
|
| 66 |
+
self.token = nn.Sequential(
|
| 67 |
+
nn.Linear(dim, 1),
|
| 68 |
+
nn.Sigmoid()
|
| 69 |
+
)
|
| 70 |
+
|
| 71 |
+
def forward(self, desc0: torch.Tensor, desc1: torch.Tensor):
|
| 72 |
+
""" get confidence tokens """
|
| 73 |
+
return (
|
| 74 |
+
self.token(desc0.detach().float()).squeeze(-1),
|
| 75 |
+
self.token(desc1.detach().float()).squeeze(-1))
|
| 76 |
+
|
| 77 |
+
|
| 78 |
+
class Attention(nn.Module):
|
| 79 |
+
def __init__(self, allow_flash: bool) -> None:
|
| 80 |
+
super().__init__()
|
| 81 |
+
if allow_flash and not FLASH_AVAILABLE:
|
| 82 |
+
warnings.warn(
|
| 83 |
+
'FlashAttention is not available. For optimal speed, '
|
| 84 |
+
'consider installing torch >= 2.0 or flash-attn.',
|
| 85 |
+
stacklevel=2,
|
| 86 |
+
)
|
| 87 |
+
self.enable_flash = allow_flash and FLASH_AVAILABLE
|
| 88 |
+
if allow_flash and FlashCrossAttention:
|
| 89 |
+
self.flash_ = FlashCrossAttention()
|
| 90 |
+
|
| 91 |
+
def forward(self, q, k, v) -> torch.Tensor:
|
| 92 |
+
if self.enable_flash and q.device.type == 'cuda':
|
| 93 |
+
if FlashCrossAttention:
|
| 94 |
+
q, k, v = [x.transpose(-2, -3) for x in [q, k, v]]
|
| 95 |
+
m = self.flash_(q.half(), torch.stack([k, v], 2).half())
|
| 96 |
+
return m.transpose(-2, -3).to(q.dtype)
|
| 97 |
+
else: # use torch 2.0 scaled_dot_product_attention with flash
|
| 98 |
+
args = [x.half().contiguous() for x in [q, k, v]]
|
| 99 |
+
with torch.backends.cuda.sdp_kernel(enable_flash=True):
|
| 100 |
+
return F.scaled_dot_product_attention(*args).to(q.dtype)
|
| 101 |
+
elif hasattr(F, 'scaled_dot_product_attention'):
|
| 102 |
+
args = [x.contiguous() for x in [q, k, v]]
|
| 103 |
+
return F.scaled_dot_product_attention(*args).to(q.dtype)
|
| 104 |
+
else:
|
| 105 |
+
s = q.shape[-1] ** -0.5
|
| 106 |
+
attn = F.softmax(torch.einsum('...id,...jd->...ij', q, k) * s, -1)
|
| 107 |
+
return torch.einsum('...ij,...jd->...id', attn, v)
|
| 108 |
+
|
| 109 |
+
|
| 110 |
+
class Transformer(nn.Module):
|
| 111 |
+
def __init__(self, embed_dim: int, num_heads: int,
|
| 112 |
+
flash: bool = False, bias: bool = True) -> None:
|
| 113 |
+
super().__init__()
|
| 114 |
+
self.embed_dim = embed_dim
|
| 115 |
+
self.num_heads = num_heads
|
| 116 |
+
assert self.embed_dim % num_heads == 0
|
| 117 |
+
self.head_dim = self.embed_dim // num_heads
|
| 118 |
+
self.Wqkv = nn.Linear(embed_dim, 3*embed_dim, bias=bias)
|
| 119 |
+
self.inner_attn = Attention(flash)
|
| 120 |
+
self.out_proj = nn.Linear(embed_dim, embed_dim, bias=bias)
|
| 121 |
+
self.ffn = nn.Sequential(
|
| 122 |
+
nn.Linear(2*embed_dim, 2*embed_dim),
|
| 123 |
+
nn.LayerNorm(2*embed_dim, elementwise_affine=True),
|
| 124 |
+
nn.GELU(),
|
| 125 |
+
nn.Linear(2*embed_dim, embed_dim)
|
| 126 |
+
)
|
| 127 |
+
|
| 128 |
+
def _forward(self, x: torch.Tensor,
|
| 129 |
+
encoding: Optional[torch.Tensor] = None):
|
| 130 |
+
qkv = self.Wqkv(x)
|
| 131 |
+
qkv = qkv.unflatten(-1, (self.num_heads, -1, 3)).transpose(1, 2)
|
| 132 |
+
q, k, v = qkv[..., 0], qkv[..., 1], qkv[..., 2]
|
| 133 |
+
if encoding is not None:
|
| 134 |
+
q = apply_cached_rotary_emb(encoding, q)
|
| 135 |
+
k = apply_cached_rotary_emb(encoding, k)
|
| 136 |
+
context = self.inner_attn(q, k, v)
|
| 137 |
+
message = self.out_proj(
|
| 138 |
+
context.transpose(1, 2).flatten(start_dim=-2))
|
| 139 |
+
return x + self.ffn(torch.cat([x, message], -1))
|
| 140 |
+
|
| 141 |
+
def forward(self, x0, x1, encoding0=None, encoding1=None):
|
| 142 |
+
return self._forward(x0, encoding0), self._forward(x1, encoding1)
|
| 143 |
+
|
| 144 |
+
|
| 145 |
+
class CrossTransformer(nn.Module):
|
| 146 |
+
def __init__(self, embed_dim: int, num_heads: int,
|
| 147 |
+
flash: bool = False, bias: bool = True) -> None:
|
| 148 |
+
super().__init__()
|
| 149 |
+
self.heads = num_heads
|
| 150 |
+
dim_head = embed_dim // num_heads
|
| 151 |
+
self.scale = dim_head ** -0.5
|
| 152 |
+
inner_dim = dim_head * num_heads
|
| 153 |
+
self.to_qk = nn.Linear(embed_dim, inner_dim, bias=bias)
|
| 154 |
+
self.to_v = nn.Linear(embed_dim, inner_dim, bias=bias)
|
| 155 |
+
self.to_out = nn.Linear(inner_dim, embed_dim, bias=bias)
|
| 156 |
+
self.ffn = nn.Sequential(
|
| 157 |
+
nn.Linear(2*embed_dim, 2*embed_dim),
|
| 158 |
+
nn.LayerNorm(2*embed_dim, elementwise_affine=True),
|
| 159 |
+
nn.GELU(),
|
| 160 |
+
nn.Linear(2*embed_dim, embed_dim)
|
| 161 |
+
)
|
| 162 |
+
|
| 163 |
+
if flash and FLASH_AVAILABLE:
|
| 164 |
+
self.flash = Attention(True)
|
| 165 |
+
else:
|
| 166 |
+
self.flash = None
|
| 167 |
+
|
| 168 |
+
def map_(self, func: Callable, x0: torch.Tensor, x1: torch.Tensor):
|
| 169 |
+
return func(x0), func(x1)
|
| 170 |
+
|
| 171 |
+
def forward(self, x0: torch.Tensor, x1: torch.Tensor) -> List[torch.Tensor]:
|
| 172 |
+
qk0, qk1 = self.map_(self.to_qk, x0, x1)
|
| 173 |
+
v0, v1 = self.map_(self.to_v, x0, x1)
|
| 174 |
+
qk0, qk1, v0, v1 = map(
|
| 175 |
+
lambda t: t.unflatten(-1, (self.heads, -1)).transpose(1, 2),
|
| 176 |
+
(qk0, qk1, v0, v1))
|
| 177 |
+
if self.flash is not None:
|
| 178 |
+
m0 = self.flash(qk0, qk1, v1)
|
| 179 |
+
m1 = self.flash(qk1, qk0, v0)
|
| 180 |
+
else:
|
| 181 |
+
qk0, qk1 = qk0 * self.scale**0.5, qk1 * self.scale**0.5
|
| 182 |
+
sim = torch.einsum('b h i d, b h j d -> b h i j', qk0, qk1)
|
| 183 |
+
attn01 = F.softmax(sim, dim=-1)
|
| 184 |
+
attn10 = F.softmax(sim.transpose(-2, -1).contiguous(), dim=-1)
|
| 185 |
+
m0 = torch.einsum('bhij, bhjd -> bhid', attn01, v1)
|
| 186 |
+
m1 = torch.einsum('bhji, bhjd -> bhid', attn10.transpose(-2, -1), v0)
|
| 187 |
+
m0, m1 = self.map_(lambda t: t.transpose(1, 2).flatten(start_dim=-2),
|
| 188 |
+
m0, m1)
|
| 189 |
+
m0, m1 = self.map_(self.to_out, m0, m1)
|
| 190 |
+
x0 = x0 + self.ffn(torch.cat([x0, m0], -1))
|
| 191 |
+
x1 = x1 + self.ffn(torch.cat([x1, m1], -1))
|
| 192 |
+
return x0, x1
|
| 193 |
+
|
| 194 |
+
|
| 195 |
+
def sigmoid_log_double_softmax(
|
| 196 |
+
sim: torch.Tensor, z0: torch.Tensor, z1: torch.Tensor) -> torch.Tensor:
|
| 197 |
+
""" create the log assignment matrix from logits and similarity"""
|
| 198 |
+
b, m, n = sim.shape
|
| 199 |
+
certainties = F.logsigmoid(z0) + F.logsigmoid(z1).transpose(1, 2)
|
| 200 |
+
scores0 = F.log_softmax(sim, 2)
|
| 201 |
+
scores1 = F.log_softmax(
|
| 202 |
+
sim.transpose(-1, -2).contiguous(), 2).transpose(-1, -2)
|
| 203 |
+
scores = sim.new_full((b, m+1, n+1), 0)
|
| 204 |
+
scores[:, :m, :n] = (scores0 + scores1 + certainties)
|
| 205 |
+
scores[:, :-1, -1] = F.logsigmoid(-z0.squeeze(-1))
|
| 206 |
+
scores[:, -1, :-1] = F.logsigmoid(-z1.squeeze(-1))
|
| 207 |
+
return scores
|
| 208 |
+
|
| 209 |
+
|
| 210 |
+
class MatchAssignment(nn.Module):
|
| 211 |
+
def __init__(self, dim: int) -> None:
|
| 212 |
+
super().__init__()
|
| 213 |
+
self.dim = dim
|
| 214 |
+
self.matchability = nn.Linear(dim, 1, bias=True)
|
| 215 |
+
self.final_proj = nn.Linear(dim, dim, bias=True)
|
| 216 |
+
|
| 217 |
+
def forward(self, desc0: torch.Tensor, desc1: torch.Tensor):
|
| 218 |
+
""" build assignment matrix from descriptors """
|
| 219 |
+
mdesc0, mdesc1 = self.final_proj(desc0), self.final_proj(desc1)
|
| 220 |
+
_, _, d = mdesc0.shape
|
| 221 |
+
mdesc0, mdesc1 = mdesc0 / d**.25, mdesc1 / d**.25
|
| 222 |
+
sim = torch.einsum('bmd,bnd->bmn', mdesc0, mdesc1)
|
| 223 |
+
z0 = self.matchability(desc0)
|
| 224 |
+
z1 = self.matchability(desc1)
|
| 225 |
+
scores = sigmoid_log_double_softmax(sim, z0, z1)
|
| 226 |
+
return scores, sim
|
| 227 |
+
|
| 228 |
+
def scores(self, desc0: torch.Tensor, desc1: torch.Tensor):
|
| 229 |
+
m0 = torch.sigmoid(self.matchability(desc0)).squeeze(-1)
|
| 230 |
+
m1 = torch.sigmoid(self.matchability(desc1)).squeeze(-1)
|
| 231 |
+
return m0, m1
|
| 232 |
+
|
| 233 |
+
|
| 234 |
+
def filter_matches(scores: torch.Tensor, th: float):
|
| 235 |
+
""" obtain matches from a log assignment matrix [Bx M+1 x N+1]"""
|
| 236 |
+
max0, max1 = scores[:, :-1, :-1].max(2), scores[:, :-1, :-1].max(1)
|
| 237 |
+
m0, m1 = max0.indices, max1.indices
|
| 238 |
+
mutual0 = torch.arange(m0.shape[1]).to(m0)[None] == m1.gather(1, m0)
|
| 239 |
+
mutual1 = torch.arange(m1.shape[1]).to(m1)[None] == m0.gather(1, m1)
|
| 240 |
+
max0_exp = max0.values.exp()
|
| 241 |
+
zero = max0_exp.new_tensor(0)
|
| 242 |
+
mscores0 = torch.where(mutual0, max0_exp, zero)
|
| 243 |
+
mscores1 = torch.where(mutual1, mscores0.gather(1, m1), zero)
|
| 244 |
+
if th is not None:
|
| 245 |
+
valid0 = mutual0 & (mscores0 > th)
|
| 246 |
+
else:
|
| 247 |
+
valid0 = mutual0
|
| 248 |
+
valid1 = mutual1 & valid0.gather(1, m1)
|
| 249 |
+
m0 = torch.where(valid0, m0, m0.new_tensor(-1))
|
| 250 |
+
m1 = torch.where(valid1, m1, m1.new_tensor(-1))
|
| 251 |
+
return m0, m1, mscores0, mscores1
|
| 252 |
+
|
| 253 |
+
|
| 254 |
+
class LightGlue(nn.Module):
|
| 255 |
+
default_conf = {
|
| 256 |
+
'name': 'lightglue', # just for interfacing
|
| 257 |
+
'input_dim': 256, # input descriptor dimension (autoselected from weights)
|
| 258 |
+
'descriptor_dim': 256,
|
| 259 |
+
'n_layers': 9,
|
| 260 |
+
'num_heads': 4,
|
| 261 |
+
'flash': True, # enable FlashAttention if available.
|
| 262 |
+
'mp': False, # enable mixed precision
|
| 263 |
+
'depth_confidence': 0.95, # early stopping, disable with -1
|
| 264 |
+
'width_confidence': 0.99, # point pruning, disable with -1
|
| 265 |
+
'filter_threshold': 0.1, # match threshold
|
| 266 |
+
'weights': None,
|
| 267 |
+
}
|
| 268 |
+
|
| 269 |
+
required_data_keys = [
|
| 270 |
+
'image0', 'image1']
|
| 271 |
+
|
| 272 |
+
version = "v0.1_arxiv"
|
| 273 |
+
url = "https://github.com/cvg/LightGlue/releases/download/{}/{}_lightglue.pth"
|
| 274 |
+
|
| 275 |
+
features = {
|
| 276 |
+
'superpoint': ('superpoint_lightglue', 256),
|
| 277 |
+
'disk': ('disk_lightglue', 128)
|
| 278 |
+
}
|
| 279 |
+
|
| 280 |
+
def __init__(self, features='superpoint', **conf) -> None:
|
| 281 |
+
super().__init__()
|
| 282 |
+
self.conf = {**self.default_conf, **conf}
|
| 283 |
+
if features is not None:
|
| 284 |
+
assert (features in list(self.features.keys()))
|
| 285 |
+
self.conf['weights'], self.conf['input_dim'] = \
|
| 286 |
+
self.features[features]
|
| 287 |
+
self.conf = conf = SimpleNamespace(**self.conf)
|
| 288 |
+
|
| 289 |
+
if conf.input_dim != conf.descriptor_dim:
|
| 290 |
+
self.input_proj = nn.Linear(
|
| 291 |
+
conf.input_dim, conf.descriptor_dim, bias=True)
|
| 292 |
+
else:
|
| 293 |
+
self.input_proj = nn.Identity()
|
| 294 |
+
|
| 295 |
+
head_dim = conf.descriptor_dim // conf.num_heads
|
| 296 |
+
self.posenc = LearnableFourierPositionalEncoding(2, head_dim, head_dim)
|
| 297 |
+
|
| 298 |
+
h, n, d = conf.num_heads, conf.n_layers, conf.descriptor_dim
|
| 299 |
+
self.self_attn = nn.ModuleList(
|
| 300 |
+
[Transformer(d, h, conf.flash) for _ in range(n)])
|
| 301 |
+
self.cross_attn = nn.ModuleList(
|
| 302 |
+
[CrossTransformer(d, h, conf.flash) for _ in range(n)])
|
| 303 |
+
self.log_assignment = nn.ModuleList(
|
| 304 |
+
[MatchAssignment(d) for _ in range(n)])
|
| 305 |
+
self.token_confidence = nn.ModuleList([
|
| 306 |
+
TokenConfidence(d) for _ in range(n-1)])
|
| 307 |
+
|
| 308 |
+
if features is not None:
|
| 309 |
+
fname = f'{conf.weights}_{self.version}.pth'.replace('.', '-')
|
| 310 |
+
state_dict = torch.hub.load_state_dict_from_url(
|
| 311 |
+
self.url.format(self.version, features), file_name=fname)
|
| 312 |
+
self.load_state_dict(state_dict, strict=False)
|
| 313 |
+
elif conf.weights is not None:
|
| 314 |
+
path = Path(__file__).parent
|
| 315 |
+
path = path / 'weights/{}.pth'.format(self.conf.weights)
|
| 316 |
+
state_dict = torch.load(str(path), map_location='cpu')
|
| 317 |
+
self.load_state_dict(state_dict, strict=False)
|
| 318 |
+
|
| 319 |
+
print('Loaded LightGlue model')
|
| 320 |
+
|
| 321 |
+
def forward(self, data: dict) -> dict:
|
| 322 |
+
"""
|
| 323 |
+
Match keypoints and descriptors between two images
|
| 324 |
+
|
| 325 |
+
Input (dict):
|
| 326 |
+
image0: dict
|
| 327 |
+
keypoints: [B x M x 2]
|
| 328 |
+
descriptors: [B x M x D]
|
| 329 |
+
image: [B x C x H x W] or image_size: [B x 2]
|
| 330 |
+
image1: dict
|
| 331 |
+
keypoints: [B x N x 2]
|
| 332 |
+
descriptors: [B x N x D]
|
| 333 |
+
image: [B x C x H x W] or image_size: [B x 2]
|
| 334 |
+
Output (dict):
|
| 335 |
+
log_assignment: [B x M+1 x N+1]
|
| 336 |
+
matches0: [B x M]
|
| 337 |
+
matching_scores0: [B x M]
|
| 338 |
+
matches1: [B x N]
|
| 339 |
+
matching_scores1: [B x N]
|
| 340 |
+
matches: List[[Si x 2]], scores: List[[Si]]
|
| 341 |
+
"""
|
| 342 |
+
with torch.autocast(enabled=self.conf.mp, device_type='cuda'):
|
| 343 |
+
return self._forward(data)
|
| 344 |
+
|
| 345 |
+
def _forward(self, data: dict) -> dict:
|
| 346 |
+
for key in self.required_data_keys:
|
| 347 |
+
assert key in data, f'Missing key {key} in data'
|
| 348 |
+
data0, data1 = data['image0'], data['image1']
|
| 349 |
+
kpts0_, kpts1_ = data0['keypoints'], data1['keypoints']
|
| 350 |
+
b, m, _ = kpts0_.shape
|
| 351 |
+
b, n, _ = kpts1_.shape
|
| 352 |
+
size0, size1 = data0.get('image_size'), data1.get('image_size')
|
| 353 |
+
size0 = size0 if size0 is not None else data0['image'].shape[-2:][::-1]
|
| 354 |
+
size1 = size1 if size1 is not None else data1['image'].shape[-2:][::-1]
|
| 355 |
+
kpts0 = normalize_keypoints(kpts0_, size=size0)
|
| 356 |
+
kpts1 = normalize_keypoints(kpts1_, size=size1)
|
| 357 |
+
|
| 358 |
+
assert torch.all(kpts0 >= -1) and torch.all(kpts0 <= 1)
|
| 359 |
+
assert torch.all(kpts1 >= -1) and torch.all(kpts1 <= 1)
|
| 360 |
+
|
| 361 |
+
desc0 = data0['descriptors'].detach()
|
| 362 |
+
desc1 = data1['descriptors'].detach()
|
| 363 |
+
|
| 364 |
+
assert desc0.shape[-1] == self.conf.input_dim
|
| 365 |
+
assert desc1.shape[-1] == self.conf.input_dim
|
| 366 |
+
|
| 367 |
+
if torch.is_autocast_enabled():
|
| 368 |
+
desc0 = desc0.half()
|
| 369 |
+
desc1 = desc1.half()
|
| 370 |
+
|
| 371 |
+
desc0 = self.input_proj(desc0)
|
| 372 |
+
desc1 = self.input_proj(desc1)
|
| 373 |
+
|
| 374 |
+
# cache positional embeddings
|
| 375 |
+
encoding0 = self.posenc(kpts0)
|
| 376 |
+
encoding1 = self.posenc(kpts1)
|
| 377 |
+
|
| 378 |
+
# GNN + final_proj + assignment
|
| 379 |
+
ind0 = torch.arange(0, m).to(device=kpts0.device)[None]
|
| 380 |
+
ind1 = torch.arange(0, n).to(device=kpts0.device)[None]
|
| 381 |
+
prune0 = torch.ones_like(ind0) # store layer where pruning is detected
|
| 382 |
+
prune1 = torch.ones_like(ind1)
|
| 383 |
+
dec, wic = self.conf.depth_confidence, self.conf.width_confidence
|
| 384 |
+
token0, token1 = None, None
|
| 385 |
+
for i in range(self.conf.n_layers):
|
| 386 |
+
# self+cross attention
|
| 387 |
+
desc0, desc1 = self.self_attn[i](
|
| 388 |
+
desc0, desc1, encoding0, encoding1)
|
| 389 |
+
desc0, desc1 = self.cross_attn[i](desc0, desc1)
|
| 390 |
+
if i == self.conf.n_layers - 1:
|
| 391 |
+
continue # no early stopping or adaptive width at last layer
|
| 392 |
+
if dec > 0: # early stopping
|
| 393 |
+
token0, token1 = self.token_confidence[i](desc0, desc1)
|
| 394 |
+
if self.stop(token0, token1, self.conf_th(i), dec, m+n):
|
| 395 |
+
break
|
| 396 |
+
if wic > 0: # point pruning
|
| 397 |
+
match0, match1 = self.log_assignment[i].scores(desc0, desc1)
|
| 398 |
+
mask0 = self.get_mask(token0, match0, self.conf_th(i), 1-wic)
|
| 399 |
+
mask1 = self.get_mask(token1, match1, self.conf_th(i), 1-wic)
|
| 400 |
+
ind0, ind1 = ind0[mask0][None], ind1[mask1][None]
|
| 401 |
+
desc0, desc1 = desc0[mask0][None], desc1[mask1][None]
|
| 402 |
+
if desc0.shape[-2] == 0 or desc1.shape[-2] == 0:
|
| 403 |
+
break
|
| 404 |
+
encoding0 = encoding0[:, :, mask0][:, None]
|
| 405 |
+
encoding1 = encoding1[:, :, mask1][:, None]
|
| 406 |
+
prune0[:, ind0] += 1
|
| 407 |
+
prune1[:, ind1] += 1
|
| 408 |
+
|
| 409 |
+
if wic > 0: # scatter with indices after pruning
|
| 410 |
+
scores_, _ = self.log_assignment[i](desc0, desc1)
|
| 411 |
+
dt, dev = scores_.dtype, scores_.device
|
| 412 |
+
scores = torch.zeros(b, m+1, n+1, dtype=dt, device=dev)
|
| 413 |
+
scores[:, :-1, :-1] = -torch.inf
|
| 414 |
+
scores[:, ind0[0], -1] = scores_[:, :-1, -1]
|
| 415 |
+
scores[:, -1, ind1[0]] = scores_[:, -1, :-1]
|
| 416 |
+
x, y = torch.meshgrid(ind0[0], ind1[0], indexing='ij')
|
| 417 |
+
scores[:, x, y] = scores_[:, :-1, :-1]
|
| 418 |
+
else:
|
| 419 |
+
scores, _ = self.log_assignment[i](desc0, desc1)
|
| 420 |
+
|
| 421 |
+
m0, m1, mscores0, mscores1 = filter_matches(
|
| 422 |
+
scores, self.conf.filter_threshold)
|
| 423 |
+
|
| 424 |
+
matches, mscores = [], []
|
| 425 |
+
for k in range(b):
|
| 426 |
+
valid = m0[k] > -1
|
| 427 |
+
matches.append(torch.stack([torch.where(valid)[0], m0[k][valid]], -1))
|
| 428 |
+
mscores.append(mscores0[k][valid])
|
| 429 |
+
|
| 430 |
+
return {
|
| 431 |
+
'log_assignment': scores,
|
| 432 |
+
'matches0': m0,
|
| 433 |
+
'matches1': m1,
|
| 434 |
+
'matching_scores0': mscores0,
|
| 435 |
+
'matching_scores1': mscores1,
|
| 436 |
+
'stop': i+1,
|
| 437 |
+
'prune0': prune0,
|
| 438 |
+
'prune1': prune1,
|
| 439 |
+
'matches': matches,
|
| 440 |
+
'scores': mscores,
|
| 441 |
+
}
|
| 442 |
+
|
| 443 |
+
def conf_th(self, i: int) -> float:
|
| 444 |
+
""" scaled confidence threshold """
|
| 445 |
+
return np.clip(
|
| 446 |
+
0.8 + 0.1 * np.exp(-4.0 * i / self.conf.n_layers), 0, 1)
|
| 447 |
+
|
| 448 |
+
def get_mask(self, confidence: torch.Tensor, match: torch.Tensor,
|
| 449 |
+
conf_th: float, match_th: float) -> torch.Tensor:
|
| 450 |
+
""" mask points which should be removed """
|
| 451 |
+
if conf_th and confidence is not None:
|
| 452 |
+
mask = torch.where(confidence > conf_th, match,
|
| 453 |
+
match.new_tensor(1.0)) > match_th
|
| 454 |
+
else:
|
| 455 |
+
mask = match > match_th
|
| 456 |
+
return mask
|
| 457 |
+
|
| 458 |
+
def stop(self, token0: torch.Tensor, token1: torch.Tensor,
|
| 459 |
+
conf_th: float, inl_th: float, seql: int) -> torch.Tensor:
|
| 460 |
+
""" evaluate stopping condition"""
|
| 461 |
+
tokens = torch.cat([token0, token1], -1)
|
| 462 |
+
if conf_th:
|
| 463 |
+
pos = 1.0 - (tokens < conf_th).float().sum() / seql
|
| 464 |
+
return pos > inl_th
|
| 465 |
+
else:
|
| 466 |
+
return tokens.mean() > inl_th
|
third_party/LightGlue/lightglue/superpoint.py
ADDED
|
@@ -0,0 +1,230 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# %BANNER_BEGIN%
|
| 2 |
+
# ---------------------------------------------------------------------
|
| 3 |
+
# %COPYRIGHT_BEGIN%
|
| 4 |
+
#
|
| 5 |
+
# Magic Leap, Inc. ("COMPANY") CONFIDENTIAL
|
| 6 |
+
#
|
| 7 |
+
# Unpublished Copyright (c) 2020
|
| 8 |
+
# Magic Leap, Inc., All Rights Reserved.
|
| 9 |
+
#
|
| 10 |
+
# NOTICE: All information contained herein is, and remains the property
|
| 11 |
+
# of COMPANY. The intellectual and technical concepts contained herein
|
| 12 |
+
# are proprietary to COMPANY and may be covered by U.S. and Foreign
|
| 13 |
+
# Patents, patents in process, and are protected by trade secret or
|
| 14 |
+
# copyright law. Dissemination of this information or reproduction of
|
| 15 |
+
# this material is strictly forbidden unless prior written permission is
|
| 16 |
+
# obtained from COMPANY. Access to the source code contained herein is
|
| 17 |
+
# hereby forbidden to anyone except current COMPANY employees, managers
|
| 18 |
+
# or contractors who have executed Confidentiality and Non-disclosure
|
| 19 |
+
# agreements explicitly covering such access.
|
| 20 |
+
#
|
| 21 |
+
# The copyright notice above does not evidence any actual or intended
|
| 22 |
+
# publication or disclosure of this source code, which includes
|
| 23 |
+
# information that is confidential and/or proprietary, and is a trade
|
| 24 |
+
# secret, of COMPANY. ANY REPRODUCTION, MODIFICATION, DISTRIBUTION,
|
| 25 |
+
# PUBLIC PERFORMANCE, OR PUBLIC DISPLAY OF OR THROUGH USE OF THIS
|
| 26 |
+
# SOURCE CODE WITHOUT THE EXPRESS WRITTEN CONSENT OF COMPANY IS
|
| 27 |
+
# STRICTLY PROHIBITED, AND IN VIOLATION OF APPLICABLE LAWS AND
|
| 28 |
+
# INTERNATIONAL TREATIES. THE RECEIPT OR POSSESSION OF THIS SOURCE
|
| 29 |
+
# CODE AND/OR RELATED INFORMATION DOES NOT CONVEY OR IMPLY ANY RIGHTS
|
| 30 |
+
# TO REPRODUCE, DISCLOSE OR DISTRIBUTE ITS CONTENTS, OR TO MANUFACTURE,
|
| 31 |
+
# USE, OR SELL ANYTHING THAT IT MAY DESCRIBE, IN WHOLE OR IN PART.
|
| 32 |
+
#
|
| 33 |
+
# %COPYRIGHT_END%
|
| 34 |
+
# ----------------------------------------------------------------------
|
| 35 |
+
# %AUTHORS_BEGIN%
|
| 36 |
+
#
|
| 37 |
+
# Originating Authors: Paul-Edouard Sarlin
|
| 38 |
+
#
|
| 39 |
+
# %AUTHORS_END%
|
| 40 |
+
# --------------------------------------------------------------------*/
|
| 41 |
+
# %BANNER_END%
|
| 42 |
+
|
| 43 |
+
# Adapted by Remi Pautrat, Philipp Lindenberger
|
| 44 |
+
|
| 45 |
+
import torch
|
| 46 |
+
from torch import nn
|
| 47 |
+
from .utils import ImagePreprocessor
|
| 48 |
+
|
| 49 |
+
|
| 50 |
+
def simple_nms(scores, nms_radius: int):
|
| 51 |
+
""" Fast Non-maximum suppression to remove nearby points """
|
| 52 |
+
assert (nms_radius >= 0)
|
| 53 |
+
|
| 54 |
+
def max_pool(x):
|
| 55 |
+
return torch.nn.functional.max_pool2d(
|
| 56 |
+
x, kernel_size=nms_radius*2+1, stride=1, padding=nms_radius)
|
| 57 |
+
|
| 58 |
+
zeros = torch.zeros_like(scores)
|
| 59 |
+
max_mask = scores == max_pool(scores)
|
| 60 |
+
for _ in range(2):
|
| 61 |
+
supp_mask = max_pool(max_mask.float()) > 0
|
| 62 |
+
supp_scores = torch.where(supp_mask, zeros, scores)
|
| 63 |
+
new_max_mask = supp_scores == max_pool(supp_scores)
|
| 64 |
+
max_mask = max_mask | (new_max_mask & (~supp_mask))
|
| 65 |
+
return torch.where(max_mask, scores, zeros)
|
| 66 |
+
|
| 67 |
+
|
| 68 |
+
def top_k_keypoints(keypoints, scores, k):
|
| 69 |
+
if k >= len(keypoints):
|
| 70 |
+
return keypoints, scores
|
| 71 |
+
scores, indices = torch.topk(scores, k, dim=0, sorted=True)
|
| 72 |
+
return keypoints[indices], scores
|
| 73 |
+
|
| 74 |
+
|
| 75 |
+
def sample_descriptors(keypoints, descriptors, s: int = 8):
|
| 76 |
+
""" Interpolate descriptors at keypoint locations """
|
| 77 |
+
b, c, h, w = descriptors.shape
|
| 78 |
+
keypoints = keypoints - s / 2 + 0.5
|
| 79 |
+
keypoints /= torch.tensor([(w*s - s/2 - 0.5), (h*s - s/2 - 0.5)],
|
| 80 |
+
).to(keypoints)[None]
|
| 81 |
+
keypoints = keypoints*2 - 1 # normalize to (-1, 1)
|
| 82 |
+
args = {'align_corners': True} if torch.__version__ >= '1.3' else {}
|
| 83 |
+
descriptors = torch.nn.functional.grid_sample(
|
| 84 |
+
descriptors, keypoints.view(b, 1, -1, 2), mode='bilinear', **args)
|
| 85 |
+
descriptors = torch.nn.functional.normalize(
|
| 86 |
+
descriptors.reshape(b, c, -1), p=2, dim=1)
|
| 87 |
+
return descriptors
|
| 88 |
+
|
| 89 |
+
|
| 90 |
+
class SuperPoint(nn.Module):
|
| 91 |
+
"""SuperPoint Convolutional Detector and Descriptor
|
| 92 |
+
|
| 93 |
+
SuperPoint: Self-Supervised Interest Point Detection and
|
| 94 |
+
Description. Daniel DeTone, Tomasz Malisiewicz, and Andrew
|
| 95 |
+
Rabinovich. In CVPRW, 2019. https://arxiv.org/abs/1712.07629
|
| 96 |
+
|
| 97 |
+
"""
|
| 98 |
+
default_conf = {
|
| 99 |
+
'descriptor_dim': 256,
|
| 100 |
+
'nms_radius': 4,
|
| 101 |
+
'max_num_keypoints': None,
|
| 102 |
+
'detection_threshold': 0.0005,
|
| 103 |
+
'remove_borders': 4,
|
| 104 |
+
}
|
| 105 |
+
|
| 106 |
+
preprocess_conf = {
|
| 107 |
+
**ImagePreprocessor.default_conf,
|
| 108 |
+
'resize': 1024,
|
| 109 |
+
'grayscale': True,
|
| 110 |
+
}
|
| 111 |
+
|
| 112 |
+
required_data_keys = ['image']
|
| 113 |
+
|
| 114 |
+
def __init__(self, **conf):
|
| 115 |
+
super().__init__()
|
| 116 |
+
self.conf = {**self.default_conf, **conf}
|
| 117 |
+
|
| 118 |
+
self.relu = nn.ReLU(inplace=True)
|
| 119 |
+
self.pool = nn.MaxPool2d(kernel_size=2, stride=2)
|
| 120 |
+
c1, c2, c3, c4, c5 = 64, 64, 128, 128, 256
|
| 121 |
+
|
| 122 |
+
self.conv1a = nn.Conv2d(1, c1, kernel_size=3, stride=1, padding=1)
|
| 123 |
+
self.conv1b = nn.Conv2d(c1, c1, kernel_size=3, stride=1, padding=1)
|
| 124 |
+
self.conv2a = nn.Conv2d(c1, c2, kernel_size=3, stride=1, padding=1)
|
| 125 |
+
self.conv2b = nn.Conv2d(c2, c2, kernel_size=3, stride=1, padding=1)
|
| 126 |
+
self.conv3a = nn.Conv2d(c2, c3, kernel_size=3, stride=1, padding=1)
|
| 127 |
+
self.conv3b = nn.Conv2d(c3, c3, kernel_size=3, stride=1, padding=1)
|
| 128 |
+
self.conv4a = nn.Conv2d(c3, c4, kernel_size=3, stride=1, padding=1)
|
| 129 |
+
self.conv4b = nn.Conv2d(c4, c4, kernel_size=3, stride=1, padding=1)
|
| 130 |
+
|
| 131 |
+
self.convPa = nn.Conv2d(c4, c5, kernel_size=3, stride=1, padding=1)
|
| 132 |
+
self.convPb = nn.Conv2d(c5, 65, kernel_size=1, stride=1, padding=0)
|
| 133 |
+
|
| 134 |
+
self.convDa = nn.Conv2d(c4, c5, kernel_size=3, stride=1, padding=1)
|
| 135 |
+
self.convDb = nn.Conv2d(
|
| 136 |
+
c5, self.conf['descriptor_dim'],
|
| 137 |
+
kernel_size=1, stride=1, padding=0)
|
| 138 |
+
|
| 139 |
+
url = "https://github.com/cvg/LightGlue/releases/download/v0.1_arxiv/superpoint_v1.pth"
|
| 140 |
+
self.load_state_dict(torch.hub.load_state_dict_from_url(url))
|
| 141 |
+
|
| 142 |
+
mk = self.conf['max_num_keypoints']
|
| 143 |
+
if mk is not None and mk <= 0:
|
| 144 |
+
raise ValueError('max_num_keypoints must be positive or None')
|
| 145 |
+
|
| 146 |
+
print('Loaded SuperPoint model')
|
| 147 |
+
|
| 148 |
+
def forward(self, data: dict) -> dict:
|
| 149 |
+
""" Compute keypoints, scores, descriptors for image """
|
| 150 |
+
for key in self.required_data_keys:
|
| 151 |
+
assert key in data, f'Missing key {key} in data'
|
| 152 |
+
image = data['image']
|
| 153 |
+
if image.shape[1] == 3: # RGB
|
| 154 |
+
scale = image.new_tensor([0.299, 0.587, 0.114]).view(1, 3, 1, 1)
|
| 155 |
+
image = (image*scale).sum(1, keepdim=True)
|
| 156 |
+
# Shared Encoder
|
| 157 |
+
x = self.relu(self.conv1a(image))
|
| 158 |
+
x = self.relu(self.conv1b(x))
|
| 159 |
+
x = self.pool(x)
|
| 160 |
+
x = self.relu(self.conv2a(x))
|
| 161 |
+
x = self.relu(self.conv2b(x))
|
| 162 |
+
x = self.pool(x)
|
| 163 |
+
x = self.relu(self.conv3a(x))
|
| 164 |
+
x = self.relu(self.conv3b(x))
|
| 165 |
+
x = self.pool(x)
|
| 166 |
+
x = self.relu(self.conv4a(x))
|
| 167 |
+
x = self.relu(self.conv4b(x))
|
| 168 |
+
|
| 169 |
+
# Compute the dense keypoint scores
|
| 170 |
+
cPa = self.relu(self.convPa(x))
|
| 171 |
+
scores = self.convPb(cPa)
|
| 172 |
+
scores = torch.nn.functional.softmax(scores, 1)[:, :-1]
|
| 173 |
+
b, _, h, w = scores.shape
|
| 174 |
+
scores = scores.permute(0, 2, 3, 1).reshape(b, h, w, 8, 8)
|
| 175 |
+
scores = scores.permute(0, 1, 3, 2, 4).reshape(b, h*8, w*8)
|
| 176 |
+
scores = simple_nms(scores, self.conf['nms_radius'])
|
| 177 |
+
|
| 178 |
+
# Discard keypoints near the image borders
|
| 179 |
+
if self.conf['remove_borders']:
|
| 180 |
+
pad = self.conf['remove_borders']
|
| 181 |
+
scores[:, :pad] = -1
|
| 182 |
+
scores[:, :, :pad] = -1
|
| 183 |
+
scores[:, -pad:] = -1
|
| 184 |
+
scores[:, :, -pad:] = -1
|
| 185 |
+
|
| 186 |
+
# Extract keypoints
|
| 187 |
+
best_kp = torch.where(scores > self.conf['detection_threshold'])
|
| 188 |
+
scores = scores[best_kp]
|
| 189 |
+
|
| 190 |
+
# Separate into batches
|
| 191 |
+
keypoints = [torch.stack(best_kp[1:3], dim=-1)[best_kp[0] == i]
|
| 192 |
+
for i in range(b)]
|
| 193 |
+
scores = [scores[best_kp[0] == i] for i in range(b)]
|
| 194 |
+
|
| 195 |
+
# Keep the k keypoints with highest score
|
| 196 |
+
if self.conf['max_num_keypoints'] is not None:
|
| 197 |
+
keypoints, scores = list(zip(*[
|
| 198 |
+
top_k_keypoints(k, s, self.conf['max_num_keypoints'])
|
| 199 |
+
for k, s in zip(keypoints, scores)]))
|
| 200 |
+
|
| 201 |
+
# Convert (h, w) to (x, y)
|
| 202 |
+
keypoints = [torch.flip(k, [1]).float() for k in keypoints]
|
| 203 |
+
|
| 204 |
+
# Compute the dense descriptors
|
| 205 |
+
cDa = self.relu(self.convDa(x))
|
| 206 |
+
descriptors = self.convDb(cDa)
|
| 207 |
+
descriptors = torch.nn.functional.normalize(descriptors, p=2, dim=1)
|
| 208 |
+
|
| 209 |
+
# Extract descriptors
|
| 210 |
+
descriptors = [sample_descriptors(k[None], d[None], 8)[0]
|
| 211 |
+
for k, d in zip(keypoints, descriptors)]
|
| 212 |
+
|
| 213 |
+
return {
|
| 214 |
+
'keypoints': torch.stack(keypoints, 0),
|
| 215 |
+
'keypoint_scores': torch.stack(scores, 0),
|
| 216 |
+
'descriptors': torch.stack(descriptors, 0).transpose(-1, -2),
|
| 217 |
+
}
|
| 218 |
+
|
| 219 |
+
def extract(self, img: torch.Tensor, **conf) -> dict:
|
| 220 |
+
""" Perform extraction with online resizing"""
|
| 221 |
+
if img.dim() == 3:
|
| 222 |
+
img = img[None] # add batch dim
|
| 223 |
+
assert img.dim() == 4 and img.shape[0] == 1
|
| 224 |
+
shape = img.shape[-2:][::-1]
|
| 225 |
+
img, scales = ImagePreprocessor(
|
| 226 |
+
**{**self.preprocess_conf, **conf})(img)
|
| 227 |
+
feats = self.forward({'image': img})
|
| 228 |
+
feats['image_size'] = torch.tensor(shape)[None].to(img).float()
|
| 229 |
+
feats['keypoints'] = (feats['keypoints'] + .5) / scales[None] - .5
|
| 230 |
+
return feats
|
third_party/LightGlue/lightglue/utils.py
ADDED
|
@@ -0,0 +1,135 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from pathlib import Path
|
| 2 |
+
import torch
|
| 3 |
+
import kornia
|
| 4 |
+
import cv2
|
| 5 |
+
import numpy as np
|
| 6 |
+
from typing import Union, List, Optional, Callable, Tuple
|
| 7 |
+
import collections.abc as collections
|
| 8 |
+
from types import SimpleNamespace
|
| 9 |
+
|
| 10 |
+
|
| 11 |
+
class ImagePreprocessor:
|
| 12 |
+
default_conf = {
|
| 13 |
+
'resize': None, # target edge length, None for no resizing
|
| 14 |
+
'side': 'long',
|
| 15 |
+
'interpolation': 'bilinear',
|
| 16 |
+
'align_corners': None,
|
| 17 |
+
'antialias': True,
|
| 18 |
+
'grayscale': False, # convert rgb to grayscale
|
| 19 |
+
}
|
| 20 |
+
|
| 21 |
+
def __init__(self, **conf) -> None:
|
| 22 |
+
super().__init__()
|
| 23 |
+
self.conf = {**self.default_conf, **conf}
|
| 24 |
+
self.conf = SimpleNamespace(**self.conf)
|
| 25 |
+
|
| 26 |
+
def __call__(self, img: torch.Tensor) -> Tuple[torch.Tensor, torch.Tensor]:
|
| 27 |
+
"""Resize and preprocess an image, return image and resize scale"""
|
| 28 |
+
h, w = img.shape[-2:]
|
| 29 |
+
if self.conf.resize is not None:
|
| 30 |
+
img = kornia.geometry.transform.resize(
|
| 31 |
+
img, self.conf.resize, side=self.conf.side,
|
| 32 |
+
antialias=self.conf.antialias,
|
| 33 |
+
align_corners=self.conf.align_corners)
|
| 34 |
+
scale = torch.Tensor([img.shape[-1] / w, img.shape[-2] / h]).to(img)
|
| 35 |
+
if self.conf.grayscale and img.shape[-3] == 3:
|
| 36 |
+
img = kornia.color.rgb_to_grayscale(img)
|
| 37 |
+
elif not self.conf.grayscale and img.shape[-3] == 1:
|
| 38 |
+
img = kornia.color.grayscale_to_rgb(img)
|
| 39 |
+
return img, scale
|
| 40 |
+
|
| 41 |
+
|
| 42 |
+
def map_tensor(input_, func: Callable):
|
| 43 |
+
string_classes = (str, bytes)
|
| 44 |
+
if isinstance(input_, string_classes):
|
| 45 |
+
return input_
|
| 46 |
+
elif isinstance(input_, collections.Mapping):
|
| 47 |
+
return {k: map_tensor(sample, func) for k, sample in input_.items()}
|
| 48 |
+
elif isinstance(input_, collections.Sequence):
|
| 49 |
+
return [map_tensor(sample, func) for sample in input_]
|
| 50 |
+
elif isinstance(input_, torch.Tensor):
|
| 51 |
+
return func(input_)
|
| 52 |
+
else:
|
| 53 |
+
return input_
|
| 54 |
+
|
| 55 |
+
|
| 56 |
+
def batch_to_device(batch: dict, device: str = 'cpu',
|
| 57 |
+
non_blocking: bool = True):
|
| 58 |
+
"""Move batch (dict) to device"""
|
| 59 |
+
def _func(tensor):
|
| 60 |
+
return tensor.to(device=device, non_blocking=non_blocking).detach()
|
| 61 |
+
return map_tensor(batch, _func)
|
| 62 |
+
|
| 63 |
+
|
| 64 |
+
def rbd(data: dict) -> dict:
|
| 65 |
+
"""Remove batch dimension from elements in data"""
|
| 66 |
+
return {k: v[0] if isinstance(v, (torch.Tensor, np.ndarray, list)) else v
|
| 67 |
+
for k, v in data.items()}
|
| 68 |
+
|
| 69 |
+
|
| 70 |
+
def read_image(path: Path, grayscale: bool = False) -> np.ndarray:
|
| 71 |
+
"""Read an image from path as RGB or grayscale"""
|
| 72 |
+
if not Path(path).exists():
|
| 73 |
+
raise FileNotFoundError(f'No image at path {path}.')
|
| 74 |
+
mode = cv2.IMREAD_GRAYSCALE if grayscale else cv2.IMREAD_COLOR
|
| 75 |
+
image = cv2.imread(str(path), mode)
|
| 76 |
+
if image is None:
|
| 77 |
+
raise IOError(f'Could not read image at {path}.')
|
| 78 |
+
if not grayscale:
|
| 79 |
+
image = image[..., ::-1]
|
| 80 |
+
return image
|
| 81 |
+
|
| 82 |
+
|
| 83 |
+
def numpy_image_to_torch(image: np.ndarray) -> torch.Tensor:
|
| 84 |
+
"""Normalize the image tensor and reorder the dimensions."""
|
| 85 |
+
if image.ndim == 3:
|
| 86 |
+
image = image.transpose((2, 0, 1)) # HxWxC to CxHxW
|
| 87 |
+
elif image.ndim == 2:
|
| 88 |
+
image = image[None] # add channel axis
|
| 89 |
+
else:
|
| 90 |
+
raise ValueError(f'Not an image: {image.shape}')
|
| 91 |
+
return torch.tensor(image / 255., dtype=torch.float)
|
| 92 |
+
|
| 93 |
+
|
| 94 |
+
def resize_image(image: np.ndarray, size: Union[List[int], int],
|
| 95 |
+
fn: str = 'max', interp: Optional[str] = 'area',
|
| 96 |
+
) -> np.ndarray:
|
| 97 |
+
"""Resize an image to a fixed size, or according to max or min edge."""
|
| 98 |
+
h, w = image.shape[:2]
|
| 99 |
+
|
| 100 |
+
fn = {'max': max, 'min': min}[fn]
|
| 101 |
+
if isinstance(size, int):
|
| 102 |
+
scale = size / fn(h, w)
|
| 103 |
+
h_new, w_new = int(round(h*scale)), int(round(w*scale))
|
| 104 |
+
scale = (w_new / w, h_new / h)
|
| 105 |
+
elif isinstance(size, (tuple, list)):
|
| 106 |
+
h_new, w_new = size
|
| 107 |
+
scale = (w_new / w, h_new / h)
|
| 108 |
+
else:
|
| 109 |
+
raise ValueError(f'Incorrect new size: {size}')
|
| 110 |
+
mode = {
|
| 111 |
+
'linear': cv2.INTER_LINEAR,
|
| 112 |
+
'cubic': cv2.INTER_CUBIC,
|
| 113 |
+
'nearest': cv2.INTER_NEAREST,
|
| 114 |
+
'area': cv2.INTER_AREA}[interp]
|
| 115 |
+
return cv2.resize(image, (w_new, h_new), interpolation=mode), scale
|
| 116 |
+
|
| 117 |
+
|
| 118 |
+
def load_image(path: Path, resize: int = None, **kwargs) -> torch.Tensor:
|
| 119 |
+
image = read_image(path)
|
| 120 |
+
if resize is not None:
|
| 121 |
+
image, _ = resize_image(image, resize, **kwargs)
|
| 122 |
+
return numpy_image_to_torch(image)
|
| 123 |
+
|
| 124 |
+
|
| 125 |
+
def match_pair(extractor, matcher,
|
| 126 |
+
image0: torch.Tensor, image1: torch.Tensor,
|
| 127 |
+
device: str = 'cpu', **preprocess):
|
| 128 |
+
"""Match a pair of images (image0, image1) with an extractor and matcher"""
|
| 129 |
+
feats0 = extractor.extract(image0, **preprocess)
|
| 130 |
+
feats1 = extractor.extract(image1, **preprocess)
|
| 131 |
+
matches01 = matcher({'image0': feats0, 'image1': feats1})
|
| 132 |
+
data = [feats0, feats1, matches01]
|
| 133 |
+
# remove batch dim and move to target device
|
| 134 |
+
feats0, feats1, matches01 = [batch_to_device(rbd(x), device) for x in data]
|
| 135 |
+
return feats0, feats1, matches01
|
third_party/LightGlue/lightglue/viz2d.py
ADDED
|
@@ -0,0 +1,161 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
"""
|
| 2 |
+
2D visualization primitives based on Matplotlib.
|
| 3 |
+
1) Plot images with `plot_images`.
|
| 4 |
+
2) Call `plot_keypoints` or `plot_matches` any number of times.
|
| 5 |
+
3) Optionally: save a .png or .pdf plot (nice in papers!) with `save_plot`.
|
| 6 |
+
"""
|
| 7 |
+
|
| 8 |
+
import matplotlib
|
| 9 |
+
import matplotlib.pyplot as plt
|
| 10 |
+
import matplotlib.patheffects as path_effects
|
| 11 |
+
import numpy as np
|
| 12 |
+
import torch
|
| 13 |
+
|
| 14 |
+
|
| 15 |
+
def cm_RdGn(x):
|
| 16 |
+
"""Custom colormap: red (0) -> yellow (0.5) -> green (1)."""
|
| 17 |
+
x = np.clip(x, 0, 1)[..., None]*2
|
| 18 |
+
c = x*np.array([[0, 1., 0]]) + (2-x)*np.array([[1., 0, 0]])
|
| 19 |
+
return np.clip(c, 0, 1)
|
| 20 |
+
|
| 21 |
+
|
| 22 |
+
def cm_BlRdGn(x_):
|
| 23 |
+
"""Custom colormap: blue (-1) -> red (0.0) -> green (1)."""
|
| 24 |
+
x = np.clip(x_, 0, 1)[..., None]*2
|
| 25 |
+
c = x*np.array([[0, 1., 0, 1.]]) + (2-x)*np.array([[1., 0, 0, 1.]])
|
| 26 |
+
|
| 27 |
+
xn = -np.clip(x_, -1, 0)[..., None]*2
|
| 28 |
+
cn = xn*np.array([[0, 0.1, 1, 1.]]) + (2-xn)*np.array([[1., 0, 0, 1.]])
|
| 29 |
+
out = np.clip(np.where(x_[..., None] < 0, cn, c), 0, 1)
|
| 30 |
+
return out
|
| 31 |
+
|
| 32 |
+
|
| 33 |
+
def cm_prune(x_):
|
| 34 |
+
""" Custom colormap to visualize pruning """
|
| 35 |
+
if isinstance(x_, torch.Tensor):
|
| 36 |
+
x_ = x_.cpu().numpy()
|
| 37 |
+
max_i = max(x_)
|
| 38 |
+
norm_x = np.where(x_ == max_i, -1, (x_-1) / 9)
|
| 39 |
+
return cm_BlRdGn(norm_x)
|
| 40 |
+
|
| 41 |
+
|
| 42 |
+
def plot_images(imgs, titles=None, cmaps='gray', dpi=100, pad=.5,
|
| 43 |
+
adaptive=True):
|
| 44 |
+
"""Plot a set of images horizontally.
|
| 45 |
+
Args:
|
| 46 |
+
imgs: list of NumPy RGB (H, W, 3) or PyTorch RGB (3, H, W) or mono (H, W).
|
| 47 |
+
titles: a list of strings, as titles for each image.
|
| 48 |
+
cmaps: colormaps for monochrome images.
|
| 49 |
+
adaptive: whether the figure size should fit the image aspect ratios.
|
| 50 |
+
"""
|
| 51 |
+
# conversion to (H, W, 3) for torch.Tensor
|
| 52 |
+
imgs = [img.permute(1, 2, 0).cpu().numpy()
|
| 53 |
+
if (isinstance(img, torch.Tensor) and img.dim() == 3) else img
|
| 54 |
+
for img in imgs]
|
| 55 |
+
|
| 56 |
+
n = len(imgs)
|
| 57 |
+
if not isinstance(cmaps, (list, tuple)):
|
| 58 |
+
cmaps = [cmaps] * n
|
| 59 |
+
|
| 60 |
+
if adaptive:
|
| 61 |
+
ratios = [i.shape[1] / i.shape[0] for i in imgs] # W / H
|
| 62 |
+
else:
|
| 63 |
+
ratios = [4/3] * n
|
| 64 |
+
figsize = [sum(ratios)*4.5, 4.5]
|
| 65 |
+
fig, ax = plt.subplots(
|
| 66 |
+
1, n, figsize=figsize, dpi=dpi, gridspec_kw={'width_ratios': ratios})
|
| 67 |
+
if n == 1:
|
| 68 |
+
ax = [ax]
|
| 69 |
+
for i in range(n):
|
| 70 |
+
ax[i].imshow(imgs[i], cmap=plt.get_cmap(cmaps[i]))
|
| 71 |
+
ax[i].get_yaxis().set_ticks([])
|
| 72 |
+
ax[i].get_xaxis().set_ticks([])
|
| 73 |
+
ax[i].set_axis_off()
|
| 74 |
+
for spine in ax[i].spines.values(): # remove frame
|
| 75 |
+
spine.set_visible(False)
|
| 76 |
+
if titles:
|
| 77 |
+
ax[i].set_title(titles[i])
|
| 78 |
+
fig.tight_layout(pad=pad)
|
| 79 |
+
|
| 80 |
+
|
| 81 |
+
def plot_keypoints(kpts, colors='lime', ps=4, axes=None, a=1.0):
|
| 82 |
+
"""Plot keypoints for existing images.
|
| 83 |
+
Args:
|
| 84 |
+
kpts: list of ndarrays of size (N, 2).
|
| 85 |
+
colors: string, or list of list of tuples (one for each keypoints).
|
| 86 |
+
ps: size of the keypoints as float.
|
| 87 |
+
"""
|
| 88 |
+
if not isinstance(colors, list):
|
| 89 |
+
colors = [colors] * len(kpts)
|
| 90 |
+
if not isinstance(a, list):
|
| 91 |
+
a = [a] * len(kpts)
|
| 92 |
+
if axes is None:
|
| 93 |
+
axes = plt.gcf().axes
|
| 94 |
+
for ax, k, c, alpha in zip(axes, kpts, colors, a):
|
| 95 |
+
if isinstance(k, torch.Tensor):
|
| 96 |
+
k = k.cpu().numpy()
|
| 97 |
+
ax.scatter(k[:, 0], k[:, 1], c=c, s=ps, linewidths=0, alpha=alpha)
|
| 98 |
+
|
| 99 |
+
|
| 100 |
+
def plot_matches(kpts0, kpts1, color=None, lw=1.5, ps=4, a=1., labels=None,
|
| 101 |
+
axes=None):
|
| 102 |
+
"""Plot matches for a pair of existing images.
|
| 103 |
+
Args:
|
| 104 |
+
kpts0, kpts1: corresponding keypoints of size (N, 2).
|
| 105 |
+
color: color of each match, string or RGB tuple. Random if not given.
|
| 106 |
+
lw: width of the lines.
|
| 107 |
+
ps: size of the end points (no endpoint if ps=0)
|
| 108 |
+
indices: indices of the images to draw the matches on.
|
| 109 |
+
a: alpha opacity of the match lines.
|
| 110 |
+
"""
|
| 111 |
+
fig = plt.gcf()
|
| 112 |
+
if axes is None:
|
| 113 |
+
ax = fig.axes
|
| 114 |
+
ax0, ax1 = ax[0], ax[1]
|
| 115 |
+
else:
|
| 116 |
+
ax0, ax1 = axes
|
| 117 |
+
if isinstance(kpts0, torch.Tensor):
|
| 118 |
+
kpts0 = kpts0.cpu().numpy()
|
| 119 |
+
if isinstance(kpts1, torch.Tensor):
|
| 120 |
+
kpts1 = kpts1.cpu().numpy()
|
| 121 |
+
assert len(kpts0) == len(kpts1)
|
| 122 |
+
if color is None:
|
| 123 |
+
color = matplotlib.cm.hsv(np.random.rand(len(kpts0))).tolist()
|
| 124 |
+
elif len(color) > 0 and not isinstance(color[0], (tuple, list)):
|
| 125 |
+
color = [color] * len(kpts0)
|
| 126 |
+
|
| 127 |
+
if lw > 0:
|
| 128 |
+
for i in range(len(kpts0)):
|
| 129 |
+
line = matplotlib.patches.ConnectionPatch(
|
| 130 |
+
xyA=(kpts0[i, 0], kpts0[i, 1]), xyB=(kpts1[i, 0], kpts1[i, 1]),
|
| 131 |
+
coordsA=ax0.transData, coordsB=ax1.transData,
|
| 132 |
+
axesA=ax0, axesB=ax1,
|
| 133 |
+
zorder=1, color=color[i], linewidth=lw, clip_on=True,
|
| 134 |
+
alpha=a, label=None if labels is None else labels[i],
|
| 135 |
+
picker=5.0)
|
| 136 |
+
line.set_annotation_clip(True)
|
| 137 |
+
fig.add_artist(line)
|
| 138 |
+
|
| 139 |
+
# freeze the axes to prevent the transform to change
|
| 140 |
+
ax0.autoscale(enable=False)
|
| 141 |
+
ax1.autoscale(enable=False)
|
| 142 |
+
|
| 143 |
+
if ps > 0:
|
| 144 |
+
ax0.scatter(kpts0[:, 0], kpts0[:, 1], c=color, s=ps)
|
| 145 |
+
ax1.scatter(kpts1[:, 0], kpts1[:, 1], c=color, s=ps)
|
| 146 |
+
|
| 147 |
+
|
| 148 |
+
def add_text(idx, text, pos=(0.01, 0.99), fs=15, color='w',
|
| 149 |
+
lcolor='k', lwidth=2, ha='left', va='top'):
|
| 150 |
+
ax = plt.gcf().axes[idx]
|
| 151 |
+
t = ax.text(*pos, text, fontsize=fs, ha=ha, va=va,
|
| 152 |
+
color=color, transform=ax.transAxes)
|
| 153 |
+
if lcolor is not None:
|
| 154 |
+
t.set_path_effects([
|
| 155 |
+
path_effects.Stroke(linewidth=lwidth, foreground=lcolor),
|
| 156 |
+
path_effects.Normal()])
|
| 157 |
+
|
| 158 |
+
|
| 159 |
+
def save_plot(path, **kw):
|
| 160 |
+
"""Save the current figure without any white margin."""
|
| 161 |
+
plt.savefig(path, bbox_inches='tight', pad_inches=0, **kw)
|
third_party/LightGlue/requirements.txt
ADDED
|
@@ -0,0 +1,6 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
torch>=1.9.1
|
| 2 |
+
torchvision>=0.3
|
| 3 |
+
numpy
|
| 4 |
+
opencv-python
|
| 5 |
+
matplotlib
|
| 6 |
+
kornia>=0.6.11
|
third_party/LightGlue/setup.py
ADDED
|
@@ -0,0 +1,27 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from pathlib import Path
|
| 2 |
+
from setuptools import setup
|
| 3 |
+
|
| 4 |
+
description = ['LightGlue']
|
| 5 |
+
|
| 6 |
+
with open(str(Path(__file__).parent / 'README.md'), 'r', encoding='utf-8') as f:
|
| 7 |
+
readme = f.read()
|
| 8 |
+
with open(str(Path(__file__).parent / 'requirements.txt'), 'r') as f:
|
| 9 |
+
dependencies = f.read().split('\n')
|
| 10 |
+
|
| 11 |
+
setup(
|
| 12 |
+
name='lightglue',
|
| 13 |
+
version='0.0',
|
| 14 |
+
packages=['lightglue'],
|
| 15 |
+
python_requires='>=3.6',
|
| 16 |
+
install_requires=dependencies,
|
| 17 |
+
author='Philipp Lindenberger, Paul-Edouard Sarlin',
|
| 18 |
+
description=description,
|
| 19 |
+
long_description=readme,
|
| 20 |
+
long_description_content_type="text/markdown",
|
| 21 |
+
url='https://github.com/cvg/LightGlue/',
|
| 22 |
+
classifiers=[
|
| 23 |
+
"Programming Language :: Python :: 3",
|
| 24 |
+
"License :: OSI Approved :: Apache Software License",
|
| 25 |
+
"Operating System :: OS Independent",
|
| 26 |
+
],
|
| 27 |
+
)
|