Spaces:
Runtime error

Runtime error
Shiaoming
commited on
Commit
·
64abe77
1
Parent(s):
da0591b
release code
Browse filesThis view is limited to 50 files because it contains too many changes.
See raw diff
- README.md +111 -2
- alike.py +143 -0
- alnet.py +164 -0
- assets/alike.png +0 -0
- assets/kitti/000100.png +0 -0
- assets/kitti/000101.png +0 -0
- assets/kitti/000102.png +0 -0
- assets/kitti/000103.png +0 -0
- assets/kitti/000104.png +0 -0
- assets/kitti/000105.png +0 -0
- assets/kitti/000106.png +0 -0
- assets/kitti/000107.png +0 -0
- assets/kitti/000108.png +0 -0
- assets/kitti/000109.png +0 -0
- assets/kitti/000110.png +0 -0
- assets/kitti/000111.png +0 -0
- assets/kitti/000112.png +0 -0
- assets/kitti/000113.png +0 -0
- assets/kitti/000114.png +0 -0
- assets/kitti/000115.png +0 -0
- assets/kitti/000116.png +0 -0
- assets/kitti/000117.png +0 -0
- assets/kitti/000118.png +0 -0
- assets/kitti/000119.png +0 -0
- assets/tum/1311868169.163498.png +0 -0
- assets/tum/1311868169.263274.png +0 -0
- assets/tum/1311868169.363470.png +0 -0
- assets/tum/1311868169.463229.png +0 -0
- assets/tum/1311868169.563501.png +0 -0
- assets/tum/1311868169.663240.png +0 -0
- assets/tum/1311868169.763417.png +0 -0
- assets/tum/1311868169.863396.png +0 -0
- assets/tum/1311868169.963415.png +0 -0
- assets/tum/1311868170.063469.png +0 -0
- assets/tum/1311868170.163416.png +0 -0
- assets/tum/1311868170.263521.png +0 -0
- assets/tum/1311868170.363400.png +0 -0
- assets/tum/1311868170.463383.png +0 -0
- assets/tum/1311868170.563345.png +0 -0
- assets/tum/1311868170.663430.png +0 -0
- assets/tum/1311868170.763453.png +0 -0
- assets/tum/1311868170.863446.png +0 -0
- assets/tum/1311868170.963440.png +0 -0
- assets/tum/1311868171.063438.png +0 -0
- demo.py +167 -0
- hseq/cache/alike-l-ms.npy +0 -0
- hseq/cache/alike-l.npy +0 -0
- hseq/cache/alike-n-ms.npy +0 -0
- hseq/cache/alike-n.npy +0 -0
- hseq/cache/aslfeat.npy +0 -0
README.md
CHANGED
|
@@ -1,3 +1,112 @@
|
|
| 1 |
-
# ALIKE
|
| 2 |
|
| 3 |
-
The
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
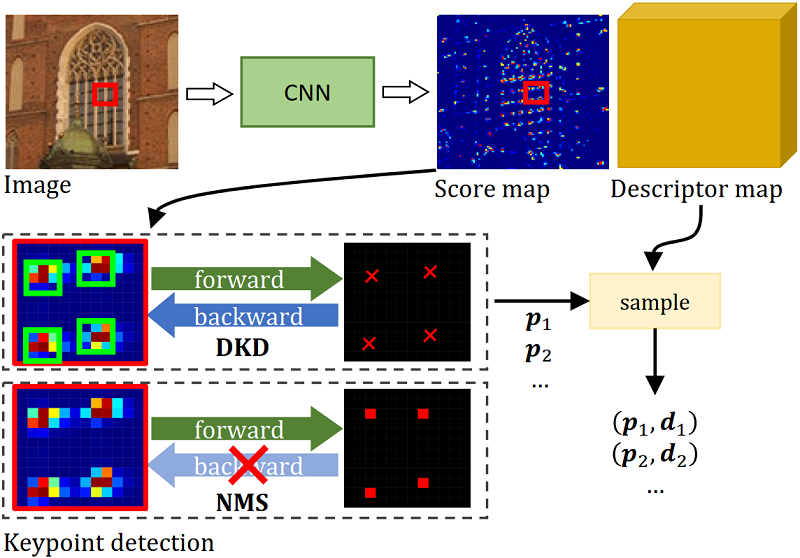
# ALIKE: Accurate and Lightweight Keypoint Detection and Descriptor Extraction
|
| 2 |
|
| 3 |
+
ALIKE applies a differentiable keypoint detection module to detect accurate sub-pixel keypoints. The network can run at 95 frames per second for 640 x 480 images on NVIDIA Titan RTX GPU and achieve equivalent performance with the state-of-the-arts. ALIKE benefits real-time applications in resource-limited platforms/devices. Technical details are described in [this paper](https://arxiv.org/pdf/2112.02906.pdf).
|
| 4 |
+
|
| 5 |
+
> ```
|
| 6 |
+
> Xiaoming Zhao, Xingming Wu, Jinyu Miao, Weihai Chen, Peter C. Y. Chen, Zhengguo Li, "ALIKE: Accurate and Lightweight Keypoint
|
| 7 |
+
> Detection and Descriptor Extraction," IEEE Transactions on Multimedia, 2022.
|
| 8 |
+
> ```
|
| 9 |
+
|
| 10 |
+

|
| 11 |
+
|
| 12 |
+
|
| 13 |
+
If you use ALIKE in an academic work, please cite:
|
| 14 |
+
|
| 15 |
+
```
|
| 16 |
+
@article{Zhao2022ALIKE,
|
| 17 |
+
title={ALIKE: Accurate and Lightweight Keypoint Detection and Descriptor Extraction},
|
| 18 |
+
author={Xiaoming Zhao and Xingming Wu and Jinyu Miao and Weihai Chen and Peter C. Y. Chen and Zhengguo Li},
|
| 19 |
+
journal={IEEE Transactions on Multimedia},
|
| 20 |
+
year={2022}
|
| 21 |
+
}
|
| 22 |
+
```
|
| 23 |
+
|
| 24 |
+
|
| 25 |
+
|
| 26 |
+
## 1. Prerequisites
|
| 27 |
+
|
| 28 |
+
The required packages are listed in the `requirements.txt` :
|
| 29 |
+
|
| 30 |
+
```shell
|
| 31 |
+
pip install -r requirements.txt
|
| 32 |
+
```
|
| 33 |
+
|
| 34 |
+
|
| 35 |
+
|
| 36 |
+
## 2. Models
|
| 37 |
+
|
| 38 |
+
The off-the-shelf weights of four variant ALIKE models are provided in `models/` .
|
| 39 |
+
|
| 40 |
+
|
| 41 |
+
|
| 42 |
+
## 3. Run demo
|
| 43 |
+
|
| 44 |
+
```shell
|
| 45 |
+
$ python demo.py -h
|
| 46 |
+
usage: demo.py [-h] [--model {alike-t,alike-s,alike-n,alike-l}]
|
| 47 |
+
[--device DEVICE] [--top_k TOP_K] [--scores_th SCORES_TH]
|
| 48 |
+
[--n_limit N_LIMIT] [--no_display] [--no_sub_pixel]
|
| 49 |
+
input
|
| 50 |
+
|
| 51 |
+
ALike Demo.
|
| 52 |
+
|
| 53 |
+
positional arguments:
|
| 54 |
+
input Image directory or movie file or "camera0" (for
|
| 55 |
+
webcam0).
|
| 56 |
+
|
| 57 |
+
optional arguments:
|
| 58 |
+
-h, --help show this help message and exit
|
| 59 |
+
--model {alike-t,alike-s,alike-n,alike-l}
|
| 60 |
+
The model configuration
|
| 61 |
+
--device DEVICE Running device (default: cuda).
|
| 62 |
+
--top_k TOP_K Detect top K keypoints. -1 for threshold based mode,
|
| 63 |
+
>0 for top K mode. (default: -1)
|
| 64 |
+
--scores_th SCORES_TH
|
| 65 |
+
Detector score threshold (default: 0.2).
|
| 66 |
+
--n_limit N_LIMIT Maximum number of keypoints to be detected (default:
|
| 67 |
+
5000).
|
| 68 |
+
--no_display Do not display images to screen. Useful if running
|
| 69 |
+
remotely (default: False).
|
| 70 |
+
--no_sub_pixel Do not detect sub-pixel keypoints (default: False).
|
| 71 |
+
```
|
| 72 |
+
|
| 73 |
+
|
| 74 |
+
|
| 75 |
+
## 4. Examples
|
| 76 |
+
|
| 77 |
+
### KITTI example
|
| 78 |
+
```shell
|
| 79 |
+
python demo.py assets/kitti
|
| 80 |
+
```
|
| 81 |
+

|
| 82 |
+
|
| 83 |
+
### TUM example
|
| 84 |
+
```shell
|
| 85 |
+
python demo.py assets/tum
|
| 86 |
+
```
|
| 87 |
+

|
| 88 |
+
|
| 89 |
+
## 5. Efficiency and performance
|
| 90 |
+
|
| 91 |
+
| Models | Parameters | GFLOPs(640x480) | MHA@3 on Hpatches | mAA(10°) on [IMW2020-test](https://www.cs.ubc.ca/research/image-matching-challenge/2021/leaderboard) (Stereo) |
|
| 92 |
+
|:---:|:---:|:---:|:-----------------:|:-------------------------------------------------------------------------------------------------------------:|
|
| 93 |
+
| D2-Net(MS) | 7653KB | 889.40 | 38.33% | 12.27% |
|
| 94 |
+
| LF-Net(MS) | 2642KB | 24.37 | 57.78% | 23.44% |
|
| 95 |
+
| SuperPoint | 1301KB | 26.11 | 70.19% | 28.97% |
|
| 96 |
+
| R2D2(MS) | 484KB | 464.55 | 71.48% | 39.02% |
|
| 97 |
+
| ASLFeat(MS) | 823KB | 77.58 | 73.52% | 33.65% |
|
| 98 |
+
| DISK | 1092KB | 98.97 | 70.56% | 51.22% |
|
| 99 |
+
| ALike-N | 318KB | 7.909 | 75.74% | 47.18% |
|
| 100 |
+
| ALike-L | 653KB | 19.685 | 76.85% | 49.58% |
|
| 101 |
+
|
| 102 |
+
### Evaluation on Hpatches
|
| 103 |
+
|
| 104 |
+
- Download [hpatches-sequences-release](https://hpatches.github.io/) and put it into `hseq/hpatches-sequences-release`.
|
| 105 |
+
- Remove the unrelaiable sequences as D2-Net.
|
| 106 |
+
- Run the following command to evaluate the performance:
|
| 107 |
+
```shell
|
| 108 |
+
python hseq/eval.py
|
| 109 |
+
```
|
| 110 |
+
|
| 111 |
+
|
| 112 |
+
For more details, please refer to the [paper](https://arxiv.org/abs/2112.02906).
|
alike.py
ADDED
|
@@ -0,0 +1,143 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import logging
|
| 2 |
+
import os
|
| 3 |
+
import cv2
|
| 4 |
+
import torch
|
| 5 |
+
from copy import deepcopy
|
| 6 |
+
import torch.nn.functional as F
|
| 7 |
+
from torchvision.transforms import ToTensor
|
| 8 |
+
import math
|
| 9 |
+
|
| 10 |
+
from alnet import ALNet
|
| 11 |
+
from soft_detect import DKD
|
| 12 |
+
import time
|
| 13 |
+
|
| 14 |
+
configs = {
|
| 15 |
+
'alike-t': {'c1': 8, 'c2': 16, 'c3': 32, 'c4': 64, 'dim': 64, 'single_head': True, 'radius': 2,
|
| 16 |
+
'model_path': os.path.join(os.path.split(__file__)[0], 'models', 'alike-t.pth')},
|
| 17 |
+
'alike-s': {'c1': 8, 'c2': 16, 'c3': 48, 'c4': 96, 'dim': 96, 'single_head': True, 'radius': 2,
|
| 18 |
+
'model_path': os.path.join(os.path.split(__file__)[0], 'models', 'alike-s.pth')},
|
| 19 |
+
'alike-n': {'c1': 16, 'c2': 32, 'c3': 64, 'c4': 128, 'dim': 128, 'single_head': True, 'radius': 2,
|
| 20 |
+
'model_path': os.path.join(os.path.split(__file__)[0], 'models', 'alike-n.pth')},
|
| 21 |
+
'alike-l': {'c1': 32, 'c2': 64, 'c3': 128, 'c4': 128, 'dim': 128, 'single_head': False, 'radius': 2,
|
| 22 |
+
'model_path': os.path.join(os.path.split(__file__)[0], 'models', 'alike-l.pth')},
|
| 23 |
+
}
|
| 24 |
+
|
| 25 |
+
|
| 26 |
+
class ALike(ALNet):
|
| 27 |
+
def __init__(self,
|
| 28 |
+
# ================================== feature encoder
|
| 29 |
+
c1: int = 32, c2: int = 64, c3: int = 128, c4: int = 128, dim: int = 128,
|
| 30 |
+
single_head: bool = False,
|
| 31 |
+
# ================================== detect parameters
|
| 32 |
+
radius: int = 2,
|
| 33 |
+
top_k: int = 500, scores_th: float = 0.5,
|
| 34 |
+
n_limit: int = 5000,
|
| 35 |
+
device: str = 'cpu',
|
| 36 |
+
model_path: str = ''
|
| 37 |
+
):
|
| 38 |
+
super().__init__(c1, c2, c3, c4, dim, single_head)
|
| 39 |
+
self.radius = radius
|
| 40 |
+
self.top_k = top_k
|
| 41 |
+
self.n_limit = n_limit
|
| 42 |
+
self.scores_th = scores_th
|
| 43 |
+
self.dkd = DKD(radius=self.radius, top_k=self.top_k,
|
| 44 |
+
scores_th=self.scores_th, n_limit=self.n_limit)
|
| 45 |
+
self.device = device
|
| 46 |
+
|
| 47 |
+
if model_path != '':
|
| 48 |
+
state_dict = torch.load(model_path, self.device)
|
| 49 |
+
self.load_state_dict(state_dict)
|
| 50 |
+
self.to(self.device)
|
| 51 |
+
self.eval()
|
| 52 |
+
logging.info(f'Loaded model parameters from {model_path}')
|
| 53 |
+
logging.info(
|
| 54 |
+
f"Number of model parameters: {sum(p.numel() for p in self.parameters() if p.requires_grad) / 1e3}KB")
|
| 55 |
+
|
| 56 |
+
def extract_dense_map(self, image, ret_dict=False):
|
| 57 |
+
# ====================================================
|
| 58 |
+
# check image size, should be integer multiples of 2^5
|
| 59 |
+
# if it is not a integer multiples of 2^5, padding zeros
|
| 60 |
+
device = image.device
|
| 61 |
+
b, c, h, w = image.shape
|
| 62 |
+
h_ = math.ceil(h / 32) * 32 if h % 32 != 0 else h
|
| 63 |
+
w_ = math.ceil(w / 32) * 32 if w % 32 != 0 else w
|
| 64 |
+
if h_ != h:
|
| 65 |
+
h_padding = torch.zeros(b, c, h_ - h, w, device=device)
|
| 66 |
+
image = torch.cat([image, h_padding], dim=2)
|
| 67 |
+
if w_ != w:
|
| 68 |
+
w_padding = torch.zeros(b, c, h_, w_ - w, device=device)
|
| 69 |
+
image = torch.cat([image, w_padding], dim=3)
|
| 70 |
+
# ====================================================
|
| 71 |
+
|
| 72 |
+
scores_map, descriptor_map = super().forward(image)
|
| 73 |
+
|
| 74 |
+
# ====================================================
|
| 75 |
+
if h_ != h or w_ != w:
|
| 76 |
+
descriptor_map = descriptor_map[:, :, :h, :w]
|
| 77 |
+
scores_map = scores_map[:, :, :h, :w] # Bx1xHxW
|
| 78 |
+
# ====================================================
|
| 79 |
+
|
| 80 |
+
# BxCxHxW
|
| 81 |
+
descriptor_map = torch.nn.functional.normalize(descriptor_map, p=2, dim=1)
|
| 82 |
+
|
| 83 |
+
if ret_dict:
|
| 84 |
+
return {'descriptor_map': descriptor_map, 'scores_map': scores_map, }
|
| 85 |
+
else:
|
| 86 |
+
return descriptor_map, scores_map
|
| 87 |
+
|
| 88 |
+
def forward(self, img, image_size_max=99999, sort=False, sub_pixel=False):
|
| 89 |
+
"""
|
| 90 |
+
:param img: np.array HxWx3, RGB
|
| 91 |
+
:param image_size_max: maximum image size, otherwise, the image will be resized
|
| 92 |
+
:param sort: sort keypoints by scores
|
| 93 |
+
:param sub_pixel: whether to use sub-pixel accuracy
|
| 94 |
+
:return: a dictionary with 'keypoints', 'descriptors', 'scores', and 'time'
|
| 95 |
+
"""
|
| 96 |
+
H, W, three = img.shape
|
| 97 |
+
assert three == 3, "input image shape should be [HxWx3]"
|
| 98 |
+
|
| 99 |
+
# ==================== image size constraint
|
| 100 |
+
image = deepcopy(img)
|
| 101 |
+
max_hw = max(H, W)
|
| 102 |
+
if max_hw > image_size_max:
|
| 103 |
+
ratio = float(image_size_max / max_hw)
|
| 104 |
+
image = cv2.resize(image, dsize=None, fx=ratio, fy=ratio)
|
| 105 |
+
|
| 106 |
+
# ==================== convert image to tensor
|
| 107 |
+
image = torch.from_numpy(image).to(self.device).to(torch.float32).permute(2, 0, 1)[None] / 255.0
|
| 108 |
+
|
| 109 |
+
# ==================== extract keypoints
|
| 110 |
+
start = time.time()
|
| 111 |
+
|
| 112 |
+
with torch.no_grad():
|
| 113 |
+
descriptor_map, scores_map = self.extract_dense_map(image)
|
| 114 |
+
keypoints, descriptors, scores, _ = self.dkd(scores_map, descriptor_map,
|
| 115 |
+
sub_pixel=sub_pixel)
|
| 116 |
+
keypoints, descriptors, scores = keypoints[0], descriptors[0], scores[0]
|
| 117 |
+
keypoints = (keypoints + 1) / 2 * keypoints.new_tensor([[W - 1, H - 1]])
|
| 118 |
+
|
| 119 |
+
if sort:
|
| 120 |
+
indices = torch.argsort(scores, descending=True)
|
| 121 |
+
keypoints = keypoints[indices]
|
| 122 |
+
descriptors = descriptors[indices]
|
| 123 |
+
scores = scores[indices]
|
| 124 |
+
|
| 125 |
+
end = time.time()
|
| 126 |
+
|
| 127 |
+
return {'keypoints': keypoints.cpu().numpy(),
|
| 128 |
+
'descriptors': descriptors.cpu().numpy(),
|
| 129 |
+
'scores': scores.cpu().numpy(),
|
| 130 |
+
'scores_map': scores_map.cpu().numpy(),
|
| 131 |
+
'time': end - start, }
|
| 132 |
+
|
| 133 |
+
|
| 134 |
+
if __name__ == '__main__':
|
| 135 |
+
import numpy as np
|
| 136 |
+
from thop import profile
|
| 137 |
+
|
| 138 |
+
net = ALike(c1=32, c2=64, c3=128, c4=128, dim=128, single_head=False)
|
| 139 |
+
|
| 140 |
+
image = np.random.random((640, 480, 3)).astype(np.float32)
|
| 141 |
+
flops, params = profile(net, inputs=(image, 9999, False), verbose=False)
|
| 142 |
+
print('{:<30} {:<8} GFLops'.format('Computational complexity: ', flops / 1e9))
|
| 143 |
+
print('{:<30} {:<8} KB'.format('Number of parameters: ', params / 1e3))
|
alnet.py
ADDED
|
@@ -0,0 +1,164 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import torch
|
| 2 |
+
from torch import nn
|
| 3 |
+
from torchvision.models import resnet
|
| 4 |
+
from typing import Optional, Callable
|
| 5 |
+
|
| 6 |
+
|
| 7 |
+
class ConvBlock(nn.Module):
|
| 8 |
+
def __init__(self, in_channels, out_channels,
|
| 9 |
+
gate: Optional[Callable[..., nn.Module]] = None,
|
| 10 |
+
norm_layer: Optional[Callable[..., nn.Module]] = None):
|
| 11 |
+
super().__init__()
|
| 12 |
+
if gate is None:
|
| 13 |
+
self.gate = nn.ReLU(inplace=True)
|
| 14 |
+
else:
|
| 15 |
+
self.gate = gate
|
| 16 |
+
if norm_layer is None:
|
| 17 |
+
norm_layer = nn.BatchNorm2d
|
| 18 |
+
self.conv1 = resnet.conv3x3(in_channels, out_channels)
|
| 19 |
+
self.bn1 = norm_layer(out_channels)
|
| 20 |
+
self.conv2 = resnet.conv3x3(out_channels, out_channels)
|
| 21 |
+
self.bn2 = norm_layer(out_channels)
|
| 22 |
+
|
| 23 |
+
def forward(self, x):
|
| 24 |
+
x = self.gate(self.bn1(self.conv1(x))) # B x in_channels x H x W
|
| 25 |
+
x = self.gate(self.bn2(self.conv2(x))) # B x out_channels x H x W
|
| 26 |
+
return x
|
| 27 |
+
|
| 28 |
+
|
| 29 |
+
# copied from torchvision\models\resnet.py#27->BasicBlock
|
| 30 |
+
class ResBlock(nn.Module):
|
| 31 |
+
expansion: int = 1
|
| 32 |
+
|
| 33 |
+
def __init__(
|
| 34 |
+
self,
|
| 35 |
+
inplanes: int,
|
| 36 |
+
planes: int,
|
| 37 |
+
stride: int = 1,
|
| 38 |
+
downsample: Optional[nn.Module] = None,
|
| 39 |
+
groups: int = 1,
|
| 40 |
+
base_width: int = 64,
|
| 41 |
+
dilation: int = 1,
|
| 42 |
+
gate: Optional[Callable[..., nn.Module]] = None,
|
| 43 |
+
norm_layer: Optional[Callable[..., nn.Module]] = None
|
| 44 |
+
) -> None:
|
| 45 |
+
super(ResBlock, self).__init__()
|
| 46 |
+
if gate is None:
|
| 47 |
+
self.gate = nn.ReLU(inplace=True)
|
| 48 |
+
else:
|
| 49 |
+
self.gate = gate
|
| 50 |
+
if norm_layer is None:
|
| 51 |
+
norm_layer = nn.BatchNorm2d
|
| 52 |
+
if groups != 1 or base_width != 64:
|
| 53 |
+
raise ValueError('ResBlock only supports groups=1 and base_width=64')
|
| 54 |
+
if dilation > 1:
|
| 55 |
+
raise NotImplementedError("Dilation > 1 not supported in ResBlock")
|
| 56 |
+
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
|
| 57 |
+
self.conv1 = resnet.conv3x3(inplanes, planes, stride)
|
| 58 |
+
self.bn1 = norm_layer(planes)
|
| 59 |
+
self.conv2 = resnet.conv3x3(planes, planes)
|
| 60 |
+
self.bn2 = norm_layer(planes)
|
| 61 |
+
self.downsample = downsample
|
| 62 |
+
self.stride = stride
|
| 63 |
+
|
| 64 |
+
def forward(self, x: torch.Tensor) -> torch.Tensor:
|
| 65 |
+
identity = x
|
| 66 |
+
|
| 67 |
+
out = self.conv1(x)
|
| 68 |
+
out = self.bn1(out)
|
| 69 |
+
out = self.gate(out)
|
| 70 |
+
|
| 71 |
+
out = self.conv2(out)
|
| 72 |
+
out = self.bn2(out)
|
| 73 |
+
|
| 74 |
+
if self.downsample is not None:
|
| 75 |
+
identity = self.downsample(x)
|
| 76 |
+
|
| 77 |
+
out += identity
|
| 78 |
+
out = self.gate(out)
|
| 79 |
+
|
| 80 |
+
return out
|
| 81 |
+
|
| 82 |
+
|
| 83 |
+
class ALNet(nn.Module):
|
| 84 |
+
def __init__(self, c1: int = 32, c2: int = 64, c3: int = 128, c4: int = 128, dim: int = 128,
|
| 85 |
+
single_head: bool = True,
|
| 86 |
+
):
|
| 87 |
+
super().__init__()
|
| 88 |
+
|
| 89 |
+
self.gate = nn.ReLU(inplace=True)
|
| 90 |
+
|
| 91 |
+
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)
|
| 92 |
+
self.pool4 = nn.MaxPool2d(kernel_size=4, stride=4)
|
| 93 |
+
|
| 94 |
+
self.block1 = ConvBlock(3, c1, self.gate, nn.BatchNorm2d)
|
| 95 |
+
|
| 96 |
+
self.block2 = ResBlock(inplanes=c1, planes=c2, stride=1,
|
| 97 |
+
downsample=nn.Conv2d(c1, c2, 1),
|
| 98 |
+
gate=self.gate,
|
| 99 |
+
norm_layer=nn.BatchNorm2d)
|
| 100 |
+
self.block3 = ResBlock(inplanes=c2, planes=c3, stride=1,
|
| 101 |
+
downsample=nn.Conv2d(c2, c3, 1),
|
| 102 |
+
gate=self.gate,
|
| 103 |
+
norm_layer=nn.BatchNorm2d)
|
| 104 |
+
self.block4 = ResBlock(inplanes=c3, planes=c4, stride=1,
|
| 105 |
+
downsample=nn.Conv2d(c3, c4, 1),
|
| 106 |
+
gate=self.gate,
|
| 107 |
+
norm_layer=nn.BatchNorm2d)
|
| 108 |
+
|
| 109 |
+
# ================================== feature aggregation
|
| 110 |
+
self.conv1 = resnet.conv1x1(c1, dim // 4)
|
| 111 |
+
self.conv2 = resnet.conv1x1(c2, dim // 4)
|
| 112 |
+
self.conv3 = resnet.conv1x1(c3, dim // 4)
|
| 113 |
+
self.conv4 = resnet.conv1x1(dim, dim // 4)
|
| 114 |
+
self.upsample2 = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
|
| 115 |
+
self.upsample4 = nn.Upsample(scale_factor=4, mode='bilinear', align_corners=True)
|
| 116 |
+
self.upsample8 = nn.Upsample(scale_factor=8, mode='bilinear', align_corners=True)
|
| 117 |
+
self.upsample32 = nn.Upsample(scale_factor=32, mode='bilinear', align_corners=True)
|
| 118 |
+
|
| 119 |
+
# ================================== detector and descriptor head
|
| 120 |
+
self.single_head = single_head
|
| 121 |
+
if not self.single_head:
|
| 122 |
+
self.convhead1 = resnet.conv1x1(dim, dim)
|
| 123 |
+
self.convhead2 = resnet.conv1x1(dim, dim + 1)
|
| 124 |
+
|
| 125 |
+
def forward(self, image):
|
| 126 |
+
# ================================== feature encoder
|
| 127 |
+
x1 = self.block1(image) # B x c1 x H x W
|
| 128 |
+
x2 = self.pool2(x1)
|
| 129 |
+
x2 = self.block2(x2) # B x c2 x H/2 x W/2
|
| 130 |
+
x3 = self.pool4(x2)
|
| 131 |
+
x3 = self.block3(x3) # B x c3 x H/8 x W/8
|
| 132 |
+
x4 = self.pool4(x3)
|
| 133 |
+
x4 = self.block4(x4) # B x dim x H/32 x W/32
|
| 134 |
+
|
| 135 |
+
# ================================== feature aggregation
|
| 136 |
+
x1 = self.gate(self.conv1(x1)) # B x dim//4 x H x W
|
| 137 |
+
x2 = self.gate(self.conv2(x2)) # B x dim//4 x H//2 x W//2
|
| 138 |
+
x3 = self.gate(self.conv3(x3)) # B x dim//4 x H//8 x W//8
|
| 139 |
+
x4 = self.gate(self.conv4(x4)) # B x dim//4 x H//32 x W//32
|
| 140 |
+
x2_up = self.upsample2(x2) # B x dim//4 x H x W
|
| 141 |
+
x3_up = self.upsample8(x3) # B x dim//4 x H x W
|
| 142 |
+
x4_up = self.upsample32(x4) # B x dim//4 x H x W
|
| 143 |
+
x1234 = torch.cat([x1, x2_up, x3_up, x4_up], dim=1)
|
| 144 |
+
|
| 145 |
+
# ================================== detector and descriptor head
|
| 146 |
+
if not self.single_head:
|
| 147 |
+
x1234 = self.gate(self.convhead1(x1234))
|
| 148 |
+
x = self.convhead2(x1234) # B x dim+1 x H x W
|
| 149 |
+
|
| 150 |
+
descriptor_map = x[:, :-1, :, :]
|
| 151 |
+
scores_map = torch.sigmoid(x[:, -1, :, :]).unsqueeze(1)
|
| 152 |
+
|
| 153 |
+
return scores_map, descriptor_map
|
| 154 |
+
|
| 155 |
+
|
| 156 |
+
if __name__ == '__main__':
|
| 157 |
+
from thop import profile
|
| 158 |
+
|
| 159 |
+
net = ALNet(c1=16, c2=32, c3=64, c4=128, dim=128, single_head=True)
|
| 160 |
+
|
| 161 |
+
image = torch.randn(1, 3, 640, 480)
|
| 162 |
+
flops, params = profile(net, inputs=(image,), verbose=False)
|
| 163 |
+
print('{:<30} {:<8} GFLops'.format('Computational complexity: ', flops / 1e9))
|
| 164 |
+
print('{:<30} {:<8} KB'.format('Number of parameters: ', params / 1e3))
|
assets/alike.png
ADDED
|
assets/kitti/000100.png
ADDED

|
assets/kitti/000101.png
ADDED

|
assets/kitti/000102.png
ADDED

|
assets/kitti/000103.png
ADDED

|
assets/kitti/000104.png
ADDED

|
assets/kitti/000105.png
ADDED

|
assets/kitti/000106.png
ADDED

|
assets/kitti/000107.png
ADDED

|
assets/kitti/000108.png
ADDED

|
assets/kitti/000109.png
ADDED

|
assets/kitti/000110.png
ADDED

|
assets/kitti/000111.png
ADDED

|
assets/kitti/000112.png
ADDED

|
assets/kitti/000113.png
ADDED

|
assets/kitti/000114.png
ADDED

|
assets/kitti/000115.png
ADDED

|
assets/kitti/000116.png
ADDED

|
assets/kitti/000117.png
ADDED

|
assets/kitti/000118.png
ADDED

|
assets/kitti/000119.png
ADDED

|
assets/tum/1311868169.163498.png
ADDED

|
assets/tum/1311868169.263274.png
ADDED

|
assets/tum/1311868169.363470.png
ADDED

|
assets/tum/1311868169.463229.png
ADDED

|
assets/tum/1311868169.563501.png
ADDED

|
assets/tum/1311868169.663240.png
ADDED

|
assets/tum/1311868169.763417.png
ADDED

|
assets/tum/1311868169.863396.png
ADDED

|
assets/tum/1311868169.963415.png
ADDED

|
assets/tum/1311868170.063469.png
ADDED

|
assets/tum/1311868170.163416.png
ADDED

|
assets/tum/1311868170.263521.png
ADDED

|
assets/tum/1311868170.363400.png
ADDED

|
assets/tum/1311868170.463383.png
ADDED

|
assets/tum/1311868170.563345.png
ADDED

|
assets/tum/1311868170.663430.png
ADDED

|
assets/tum/1311868170.763453.png
ADDED

|
assets/tum/1311868170.863446.png
ADDED

|
assets/tum/1311868170.963440.png
ADDED

|
assets/tum/1311868171.063438.png
ADDED

|
demo.py
ADDED
|
@@ -0,0 +1,167 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import copy
|
| 2 |
+
import os
|
| 3 |
+
import cv2
|
| 4 |
+
import glob
|
| 5 |
+
import logging
|
| 6 |
+
import argparse
|
| 7 |
+
import numpy as np
|
| 8 |
+
from tqdm import tqdm
|
| 9 |
+
from alike import ALike, configs
|
| 10 |
+
|
| 11 |
+
|
| 12 |
+
class ImageLoader(object):
|
| 13 |
+
def __init__(self, filepath: str):
|
| 14 |
+
self.N = 3000
|
| 15 |
+
if filepath.startswith('camera'):
|
| 16 |
+
camera = int(filepath[6:])
|
| 17 |
+
self.cap = cv2.VideoCapture(camera)
|
| 18 |
+
if not self.cap.isOpened():
|
| 19 |
+
raise IOError(f"Can't open camera {camera}!")
|
| 20 |
+
logging.info(f'Opened camera {camera}')
|
| 21 |
+
self.mode = 'camera'
|
| 22 |
+
elif os.path.exists(filepath):
|
| 23 |
+
if os.path.isfile(filepath):
|
| 24 |
+
self.cap = cv2.VideoCapture(filepath)
|
| 25 |
+
if not self.cap.isOpened():
|
| 26 |
+
raise IOError(f"Can't open video {filepath}!")
|
| 27 |
+
rate = self.cap.get(cv2.CAP_PROP_FPS)
|
| 28 |
+
self.N = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT)) - 1
|
| 29 |
+
duration = self.N / rate
|
| 30 |
+
logging.info(f'Opened video {filepath}')
|
| 31 |
+
logging.info(f'Frames: {self.N}, FPS: {rate}, Duration: {duration}s')
|
| 32 |
+
self.mode = 'video'
|
| 33 |
+
else:
|
| 34 |
+
self.images = glob.glob(os.path.join(filepath, '*.png')) + \
|
| 35 |
+
glob.glob(os.path.join(filepath, '*.jpg')) + \
|
| 36 |
+
glob.glob(os.path.join(filepath, '*.ppm'))
|
| 37 |
+
self.images.sort()
|
| 38 |
+
self.N = len(self.images)
|
| 39 |
+
logging.info(f'Loading {self.N} images')
|
| 40 |
+
self.mode = 'images'
|
| 41 |
+
else:
|
| 42 |
+
raise IOError('Error filepath (camerax/path of images/path of videos): ', filepath)
|
| 43 |
+
|
| 44 |
+
def __getitem__(self, item):
|
| 45 |
+
if self.mode == 'camera' or self.mode == 'video':
|
| 46 |
+
if item > self.N:
|
| 47 |
+
return None
|
| 48 |
+
ret, img = self.cap.read()
|
| 49 |
+
if not ret:
|
| 50 |
+
raise "Can't read image from camera"
|
| 51 |
+
if self.mode == 'video':
|
| 52 |
+
self.cap.set(cv2.CAP_PROP_POS_FRAMES, item)
|
| 53 |
+
elif self.mode == 'images':
|
| 54 |
+
filename = self.images[item]
|
| 55 |
+
img = cv2.imread(filename)
|
| 56 |
+
if img is None:
|
| 57 |
+
raise Exception('Error reading image %s' % filename)
|
| 58 |
+
|
| 59 |
+
return img
|
| 60 |
+
|
| 61 |
+
def __len__(self):
|
| 62 |
+
return self.N
|
| 63 |
+
|
| 64 |
+
|
| 65 |
+
class SimpleTracker(object):
|
| 66 |
+
def __init__(self):
|
| 67 |
+
self.pts_prev = None
|
| 68 |
+
self.desc_prev = None
|
| 69 |
+
|
| 70 |
+
def update(self, img, pts, desc):
|
| 71 |
+
N_matches = 0
|
| 72 |
+
if self.pts_prev is None:
|
| 73 |
+
self.pts_prev = pts
|
| 74 |
+
self.desc_prev = desc
|
| 75 |
+
|
| 76 |
+
out = copy.deepcopy(img)
|
| 77 |
+
for pt1 in pts:
|
| 78 |
+
p1 = (int(round(pt1[0])), int(round(pt1[1])))
|
| 79 |
+
cv2.circle(out, p1, 1, (0, 0, 255), -1, lineType=16)
|
| 80 |
+
else:
|
| 81 |
+
matches = self.mnn_mather(self.desc_prev, desc)
|
| 82 |
+
mpts1, mpts2 = self.pts_prev[matches[:, 0]], pts[matches[:, 1]]
|
| 83 |
+
N_matches = len(matches)
|
| 84 |
+
|
| 85 |
+
out = copy.deepcopy(img)
|
| 86 |
+
for pt1, pt2 in zip(mpts1, mpts2):
|
| 87 |
+
p1 = (int(round(pt1[0])), int(round(pt1[1])))
|
| 88 |
+
p2 = (int(round(pt2[0])), int(round(pt2[1])))
|
| 89 |
+
cv2.line(out, p1, p2, (0, 255, 0), lineType=16)
|
| 90 |
+
cv2.circle(out, p2, 1, (0, 0, 255), -1, lineType=16)
|
| 91 |
+
|
| 92 |
+
self.pts_prev = pts
|
| 93 |
+
self.desc_prev = desc
|
| 94 |
+
|
| 95 |
+
return out, N_matches
|
| 96 |
+
|
| 97 |
+
def mnn_mather(self, desc1, desc2):
|
| 98 |
+
sim = desc1 @ desc2.transpose()
|
| 99 |
+
sim[sim < 0.9] = 0
|
| 100 |
+
nn12 = np.argmax(sim, axis=1)
|
| 101 |
+
nn21 = np.argmax(sim, axis=0)
|
| 102 |
+
ids1 = np.arange(0, sim.shape[0])
|
| 103 |
+
mask = (ids1 == nn21[nn12])
|
| 104 |
+
matches = np.stack([ids1[mask], nn12[mask]])
|
| 105 |
+
return matches.transpose()
|
| 106 |
+
|
| 107 |
+
|
| 108 |
+
if __name__ == '__main__':
|
| 109 |
+
parser = argparse.ArgumentParser(description='ALike Demo.')
|
| 110 |
+
parser.add_argument('input', type=str, default='',
|
| 111 |
+
help='Image directory or movie file or "camera0" (for webcam0).')
|
| 112 |
+
parser.add_argument('--model', choices=['alike-t', 'alike-s', 'alike-n', 'alike-l'], default="alike-t",
|
| 113 |
+
help="The model configuration")
|
| 114 |
+
parser.add_argument('--device', type=str, default='cuda', help="Running device (default: cuda).")
|
| 115 |
+
parser.add_argument('--top_k', type=int, default=-1,
|
| 116 |
+
help='Detect top K keypoints. -1 for threshold based mode, >0 for top K mode. (default: -1)')
|
| 117 |
+
parser.add_argument('--scores_th', type=float, default=0.2,
|
| 118 |
+
help='Detector score threshold (default: 0.2).')
|
| 119 |
+
parser.add_argument('--n_limit', type=int, default=5000,
|
| 120 |
+
help='Maximum number of keypoints to be detected (default: 5000).')
|
| 121 |
+
parser.add_argument('--no_display', action='store_true',
|
| 122 |
+
help='Do not display images to screen. Useful if running remotely (default: False).')
|
| 123 |
+
parser.add_argument('--no_sub_pixel', action='store_true',
|
| 124 |
+
help='Do not detect sub-pixel keypoints (default: False).')
|
| 125 |
+
args = parser.parse_args()
|
| 126 |
+
|
| 127 |
+
logging.basicConfig(level=logging.INFO)
|
| 128 |
+
|
| 129 |
+
image_loader = ImageLoader(args.input)
|
| 130 |
+
model = ALike(**configs[args.model],
|
| 131 |
+
device=args.device,
|
| 132 |
+
top_k=args.top_k,
|
| 133 |
+
scores_th=args.scores_th,
|
| 134 |
+
n_limit=args.n_limit)
|
| 135 |
+
tracker = SimpleTracker()
|
| 136 |
+
|
| 137 |
+
if not args.no_display:
|
| 138 |
+
logging.info("Press 'q' to stop!")
|
| 139 |
+
cv2.namedWindow(args.model)
|
| 140 |
+
|
| 141 |
+
runtime = []
|
| 142 |
+
progress_bar = tqdm(image_loader)
|
| 143 |
+
for img in progress_bar:
|
| 144 |
+
if img is None:
|
| 145 |
+
break
|
| 146 |
+
|
| 147 |
+
pred = model(img, sub_pixel=not args.no_sub_pixel)
|
| 148 |
+
kpts = pred['keypoints']
|
| 149 |
+
desc = pred['descriptors']
|
| 150 |
+
runtime.append(pred['time'])
|
| 151 |
+
|
| 152 |
+
out, N_matches = tracker.update(img, kpts, desc)
|
| 153 |
+
|
| 154 |
+
ave_fps = (1. / np.stack(runtime)).mean()
|
| 155 |
+
status = f"Fps:{ave_fps:.1f}, Keypoints/Matches: {len(kpts)}/{N_matches}"
|
| 156 |
+
progress_bar.set_description(status)
|
| 157 |
+
|
| 158 |
+
if not args.no_display:
|
| 159 |
+
cv2.setWindowTitle(args.model, args.model + ': ' + status)
|
| 160 |
+
cv2.imshow(args.model, out)
|
| 161 |
+
if cv2.waitKey(1) == ord('q'):
|
| 162 |
+
break
|
| 163 |
+
|
| 164 |
+
logging.info('Finished!')
|
| 165 |
+
if not args.no_display:
|
| 166 |
+
logging.info('Press any key to exit!')
|
| 167 |
+
cv2.waitKey()
|
hseq/cache/alike-l-ms.npy
ADDED
|
Binary file (13.1 kB). View file
|
|
|
hseq/cache/alike-l.npy
ADDED
|
Binary file (13.1 kB). View file
|
|
|
hseq/cache/alike-n-ms.npy
ADDED
|
Binary file (13.1 kB). View file
|
|
|
hseq/cache/alike-n.npy
ADDED
|
Binary file (13.1 kB). View file
|
|
|
hseq/cache/aslfeat.npy
ADDED
|
Binary file (15.4 kB). View file
|
|
|