
Srini
Browse files- __pycache__/helper.cpython-311.pyc +0 -0
- __pycache__/settings.cpython-311.pyc +0 -0
- __pycache__/sort.cpython-311.pyc +0 -0
- __pycache__/tracker.cpython-311.pyc +0 -0
- app.py +110 -0
- assets/Objdetectionyoutubegif-1.m4v +0 -0
- assets/pic1.png +0 -0
- assets/pic3.png +0 -0
- assets/segmentation.png +0 -0
- helper.py +219 -0
- images/office_4.jpg +0 -0
- images/office_4_detected.jpg +0 -0
- settings.py +52 -0
- sort.py +372 -0
- tracker.py +116 -0
- weights/yolov8n-seg.pt +3 -0
- weights/yolov8n.pt +3 -0
__pycache__/helper.cpython-311.pyc
ADDED
|
Binary file (9.27 kB). View file
|
|
|
__pycache__/settings.cpython-311.pyc
ADDED
|
Binary file (1.59 kB). View file
|
|
|
__pycache__/sort.cpython-311.pyc
ADDED
|
Binary file (22.4 kB). View file
|
|
|
__pycache__/tracker.cpython-311.pyc
ADDED
|
Binary file (5.73 kB). View file
|
|
|
app.py
ADDED
|
@@ -0,0 +1,110 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Python In-built packages
|
| 2 |
+
from pathlib import Path
|
| 3 |
+
import PIL
|
| 4 |
+
|
| 5 |
+
# External packages
|
| 6 |
+
import streamlit as st
|
| 7 |
+
|
| 8 |
+
# Local Modules
|
| 9 |
+
import settings
|
| 10 |
+
import helper
|
| 11 |
+
|
| 12 |
+
# Setting page layout
|
| 13 |
+
st.set_page_config(
|
| 14 |
+
page_title="Object Detection using YOLOv8",
|
| 15 |
+
page_icon="🤖",
|
| 16 |
+
layout="wide",
|
| 17 |
+
initial_sidebar_state="expanded"
|
| 18 |
+
)
|
| 19 |
+
|
| 20 |
+
# Main page heading
|
| 21 |
+
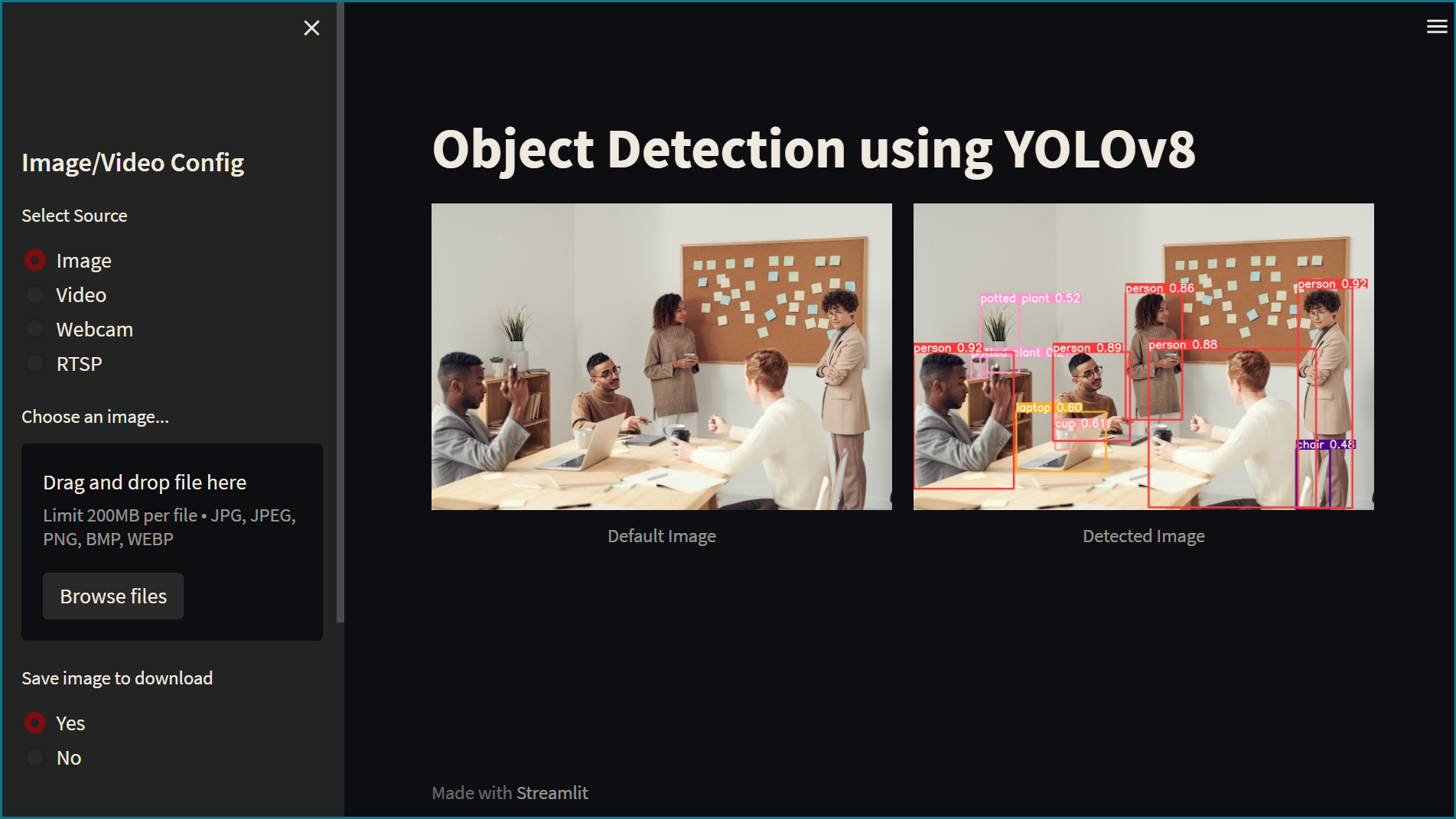
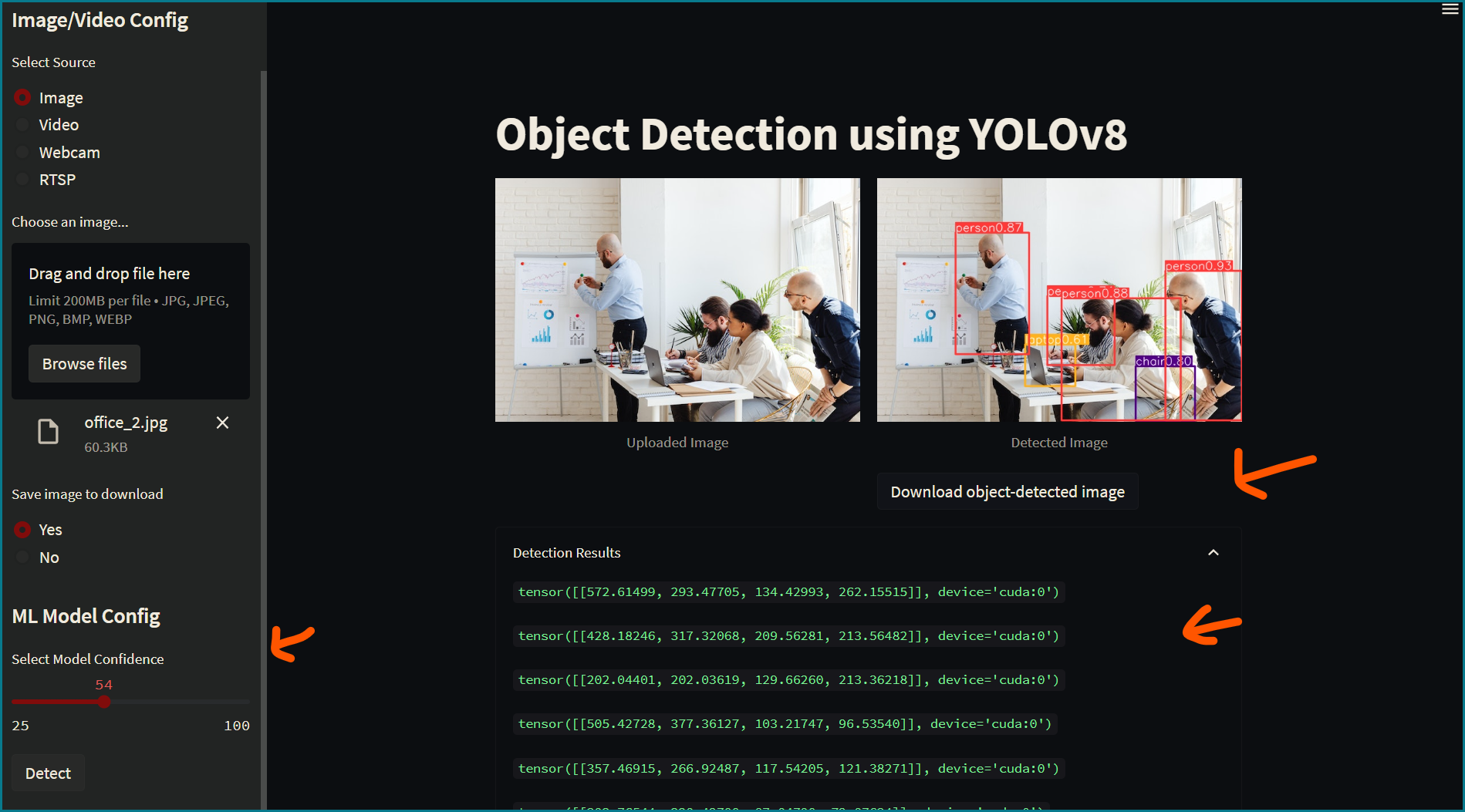
st.title("Object Detection using YOLOv8")
|
| 22 |
+
|
| 23 |
+
# Sidebar
|
| 24 |
+
st.sidebar.header("ML Model Config")
|
| 25 |
+
|
| 26 |
+
# Model Options
|
| 27 |
+
model_type = st.sidebar.radio(
|
| 28 |
+
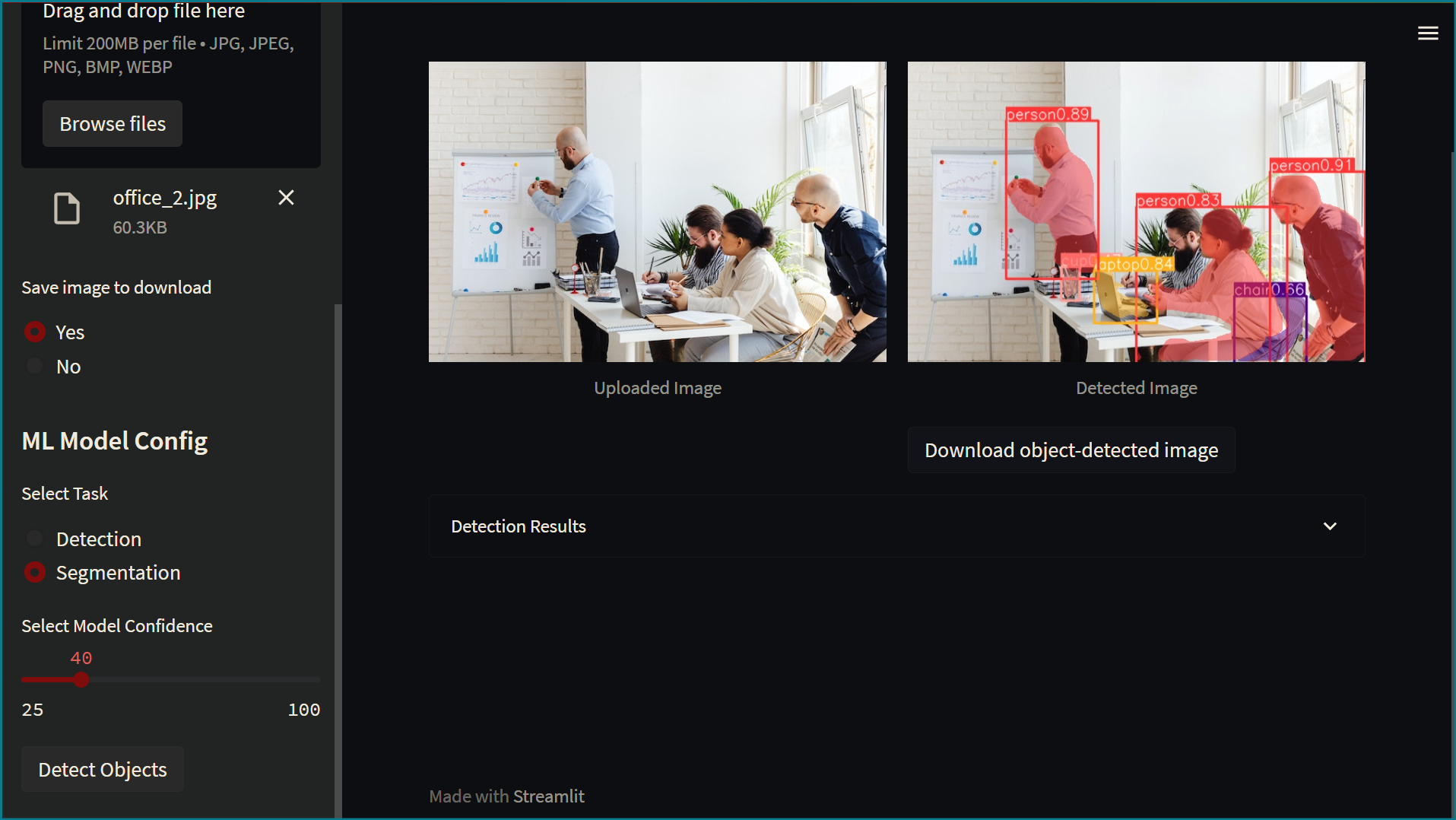
"Select Task", ['Detection', 'Segmentation'])
|
| 29 |
+
|
| 30 |
+
confidence = float(st.sidebar.slider(
|
| 31 |
+
"Select Model Confidence", 25, 100, 40)) / 100
|
| 32 |
+
|
| 33 |
+
# Selecting Detection Or Segmentation
|
| 34 |
+
if model_type == 'Detection':
|
| 35 |
+
model_path = Path(settings.DETECTION_MODEL)
|
| 36 |
+
elif model_type == 'Segmentation':
|
| 37 |
+
model_path = Path(settings.SEGMENTATION_MODEL)
|
| 38 |
+
|
| 39 |
+
# Load Pre-trained ML Model
|
| 40 |
+
try:
|
| 41 |
+
model = helper.load_model(model_path)
|
| 42 |
+
except Exception as ex:
|
| 43 |
+
st.error(f"Unable to load model. Check the specified path: {model_path}")
|
| 44 |
+
st.error(ex)
|
| 45 |
+
|
| 46 |
+
st.sidebar.header("Image/Video Config")
|
| 47 |
+
source_radio = st.sidebar.radio(
|
| 48 |
+
"Select Source", settings.SOURCES_LIST)
|
| 49 |
+
|
| 50 |
+
source_img = None
|
| 51 |
+
# If image is selected
|
| 52 |
+
if source_radio == settings.IMAGE:
|
| 53 |
+
source_img = st.sidebar.file_uploader(
|
| 54 |
+
"Choose an image...", type=("jpg", "jpeg", "png", 'bmp', 'webp'))
|
| 55 |
+
|
| 56 |
+
col1, col2 = st.columns(2)
|
| 57 |
+
|
| 58 |
+
with col1:
|
| 59 |
+
try:
|
| 60 |
+
if source_img is None:
|
| 61 |
+
default_image_path = str(settings.DEFAULT_IMAGE)
|
| 62 |
+
default_image = PIL.Image.open(default_image_path)
|
| 63 |
+
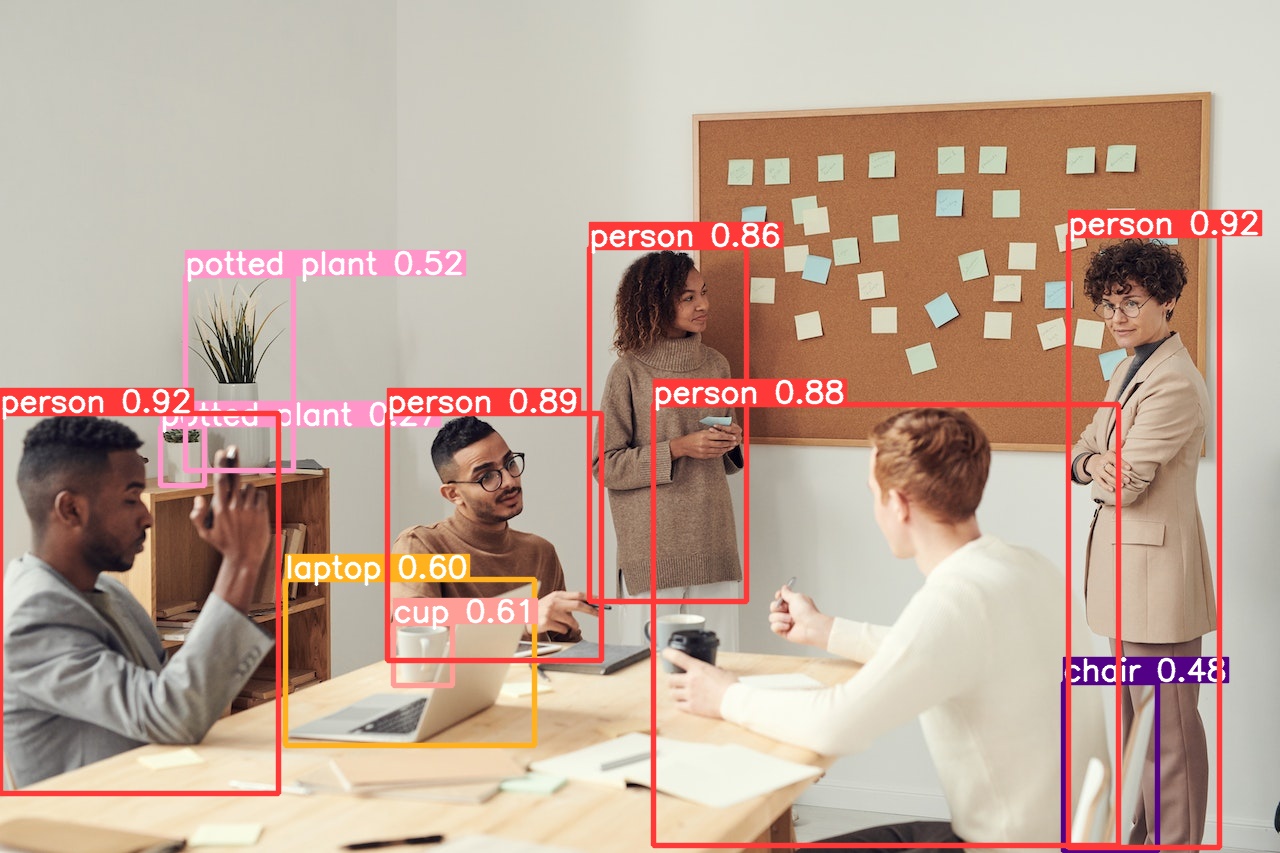
st.image(default_image_path, caption="Default Image",
|
| 64 |
+
use_column_width=True)
|
| 65 |
+
else:
|
| 66 |
+
uploaded_image = PIL.Image.open(source_img)
|
| 67 |
+
st.image(source_img, caption="Uploaded Image",
|
| 68 |
+
use_column_width=True)
|
| 69 |
+
except Exception as ex:
|
| 70 |
+
st.error("Error occurred while opening the image.")
|
| 71 |
+
st.error(ex)
|
| 72 |
+
|
| 73 |
+
with col2:
|
| 74 |
+
if source_img is None:
|
| 75 |
+
default_detected_image_path = str(settings.DEFAULT_DETECT_IMAGE)
|
| 76 |
+
default_detected_image = PIL.Image.open(
|
| 77 |
+
default_detected_image_path)
|
| 78 |
+
st.image(default_detected_image_path, caption='Detected Image',
|
| 79 |
+
use_column_width=True)
|
| 80 |
+
else:
|
| 81 |
+
if st.sidebar.button('Detect Objects'):
|
| 82 |
+
res = model.predict(uploaded_image,
|
| 83 |
+
conf=confidence
|
| 84 |
+
)
|
| 85 |
+
boxes = res[0].boxes
|
| 86 |
+
res_plotted = res[0].plot()[:, :, ::-1]
|
| 87 |
+
st.image(res_plotted, caption='Detected Image',
|
| 88 |
+
use_column_width=True)
|
| 89 |
+
try:
|
| 90 |
+
with st.expander("Detection Results"):
|
| 91 |
+
for box in boxes:
|
| 92 |
+
st.write(box.data)
|
| 93 |
+
except Exception as ex:
|
| 94 |
+
# st.write(ex)
|
| 95 |
+
st.write("No image is uploaded yet!")
|
| 96 |
+
|
| 97 |
+
elif source_radio == settings.VIDEO:
|
| 98 |
+
helper.play_stored_video(confidence, model)
|
| 99 |
+
|
| 100 |
+
elif source_radio == settings.WEBCAM:
|
| 101 |
+
helper.play_webcam(confidence, model)
|
| 102 |
+
|
| 103 |
+
elif source_radio == settings.RTSP:
|
| 104 |
+
helper.play_rtsp_stream(confidence, model)
|
| 105 |
+
|
| 106 |
+
elif source_radio == settings.YOUTUBE:
|
| 107 |
+
helper.play_youtube_video(confidence, model)
|
| 108 |
+
|
| 109 |
+
else:
|
| 110 |
+
st.error("Please select a valid source type!")
|
assets/Objdetectionyoutubegif-1.m4v
ADDED
|
Binary file (528 kB). View file
|
|
|
assets/pic1.png
ADDED
|
assets/pic3.png
ADDED
|
assets/segmentation.png
ADDED
|
helper.py
ADDED
|
@@ -0,0 +1,219 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from ultralytics import YOLO
|
| 2 |
+
import streamlit as st
|
| 3 |
+
import cv2
|
| 4 |
+
import pafy
|
| 5 |
+
|
| 6 |
+
import settings
|
| 7 |
+
import tracker
|
| 8 |
+
|
| 9 |
+
|
| 10 |
+
def load_model(model_path):
|
| 11 |
+
"""
|
| 12 |
+
Loads a YOLO object detection model from the specified model_path.
|
| 13 |
+
|
| 14 |
+
Parameters:
|
| 15 |
+
model_path (str): The path to the YOLO model file.
|
| 16 |
+
|
| 17 |
+
Returns:
|
| 18 |
+
A YOLO object detection model.
|
| 19 |
+
"""
|
| 20 |
+
model = YOLO(model_path)
|
| 21 |
+
return model
|
| 22 |
+
|
| 23 |
+
|
| 24 |
+
def display_tracker_option():
|
| 25 |
+
display_tracker = st.radio("Display Tracker", ('Yes', 'No'))
|
| 26 |
+
is_display_tracker = True if display_tracker == 'Yes' else False
|
| 27 |
+
return is_display_tracker
|
| 28 |
+
|
| 29 |
+
|
| 30 |
+
def _display_detected_frames(conf, model, st_frame, image, is_display_tracking=None):
|
| 31 |
+
"""
|
| 32 |
+
Display the detected objects on a video frame using the YOLOv8 model.
|
| 33 |
+
|
| 34 |
+
Args:
|
| 35 |
+
- conf (float): Confidence threshold for object detection.
|
| 36 |
+
- model (YoloV8): A YOLOv8 object detection model.
|
| 37 |
+
- st_frame (Streamlit object): A Streamlit object to display the detected video.
|
| 38 |
+
- image (numpy array): A numpy array representing the video frame.
|
| 39 |
+
- is_display_tracking (bool): A flag indicating whether to display object tracking (default=None).
|
| 40 |
+
|
| 41 |
+
Returns:
|
| 42 |
+
None
|
| 43 |
+
"""
|
| 44 |
+
|
| 45 |
+
# Resize the image to a standard size
|
| 46 |
+
image = cv2.resize(image, (720, int(720*(9/16))))
|
| 47 |
+
|
| 48 |
+
# Predict the objects in the image using the YOLOv8 model
|
| 49 |
+
res = model.predict(image, conf=conf)
|
| 50 |
+
result_tensor = res[0].boxes
|
| 51 |
+
|
| 52 |
+
# Display object tracking, if specified
|
| 53 |
+
if is_display_tracking:
|
| 54 |
+
tracker._display_detected_tracks(result_tensor.data, image)
|
| 55 |
+
|
| 56 |
+
# # Plot the detected objects on the video frame
|
| 57 |
+
res_plotted = res[0].plot()
|
| 58 |
+
st_frame.image(res_plotted,
|
| 59 |
+
caption='Detected Video',
|
| 60 |
+
channels="BGR",
|
| 61 |
+
use_column_width=True
|
| 62 |
+
)
|
| 63 |
+
|
| 64 |
+
|
| 65 |
+
def play_youtube_video(conf, model):
|
| 66 |
+
"""
|
| 67 |
+
Plays a webcam stream. Detects Objects in real-time using the YOLOv8 object detection model.
|
| 68 |
+
|
| 69 |
+
Parameters:
|
| 70 |
+
conf: Confidence of YOLOv8 model.
|
| 71 |
+
model: An instance of the `YOLOv8` class containing the YOLOv8 model.
|
| 72 |
+
|
| 73 |
+
Returns:
|
| 74 |
+
None
|
| 75 |
+
|
| 76 |
+
Raises:
|
| 77 |
+
None
|
| 78 |
+
"""
|
| 79 |
+
source_youtube = st.sidebar.text_input("YouTube Video url")
|
| 80 |
+
|
| 81 |
+
is_display_tracker = display_tracker_option()
|
| 82 |
+
|
| 83 |
+
if st.sidebar.button('Detect Objects'):
|
| 84 |
+
try:
|
| 85 |
+
video = pafy.new(source_youtube)
|
| 86 |
+
best = video.getbest(preftype="mp4")
|
| 87 |
+
vid_cap = cv2.VideoCapture(best.url)
|
| 88 |
+
st_frame = st.empty()
|
| 89 |
+
while (vid_cap.isOpened()):
|
| 90 |
+
success, image = vid_cap.read()
|
| 91 |
+
if success:
|
| 92 |
+
_display_detected_frames(conf,
|
| 93 |
+
model,
|
| 94 |
+
st_frame,
|
| 95 |
+
image,
|
| 96 |
+
is_display_tracker
|
| 97 |
+
)
|
| 98 |
+
else:
|
| 99 |
+
vid_cap.release()
|
| 100 |
+
break
|
| 101 |
+
except Exception as e:
|
| 102 |
+
st.sidebar.error("Error loading video: " + str(e))
|
| 103 |
+
|
| 104 |
+
|
| 105 |
+
def play_rtsp_stream(conf, model):
|
| 106 |
+
"""
|
| 107 |
+
Plays an rtsp stream. Detects Objects in real-time using the YOLOv8 object detection model.
|
| 108 |
+
|
| 109 |
+
Parameters:
|
| 110 |
+
conf: Confidence of YOLOv8 model.
|
| 111 |
+
model: An instance of the `YOLOv8` class containing the YOLOv8 model.
|
| 112 |
+
|
| 113 |
+
Returns:
|
| 114 |
+
None
|
| 115 |
+
|
| 116 |
+
Raises:
|
| 117 |
+
None
|
| 118 |
+
"""
|
| 119 |
+
source_rtsp = st.sidebar.text_input("rtsp stream url")
|
| 120 |
+
is_display_tracker = display_tracker_option()
|
| 121 |
+
if st.sidebar.button('Detect Objects'):
|
| 122 |
+
try:
|
| 123 |
+
vid_cap = cv2.VideoCapture(source_rtsp)
|
| 124 |
+
st_frame = st.empty()
|
| 125 |
+
while (vid_cap.isOpened()):
|
| 126 |
+
success, image = vid_cap.read()
|
| 127 |
+
if success:
|
| 128 |
+
_display_detected_frames(conf,
|
| 129 |
+
model,
|
| 130 |
+
st_frame,
|
| 131 |
+
image,
|
| 132 |
+
is_display_tracker
|
| 133 |
+
)
|
| 134 |
+
else:
|
| 135 |
+
vid_cap.release()
|
| 136 |
+
break
|
| 137 |
+
except Exception as e:
|
| 138 |
+
st.sidebar.error("Error loading RTSP stream: " + str(e))
|
| 139 |
+
|
| 140 |
+
|
| 141 |
+
def play_webcam(conf, model):
|
| 142 |
+
"""
|
| 143 |
+
Plays a webcam stream. Detects Objects in real-time using the YOLOv8 object detection model.
|
| 144 |
+
|
| 145 |
+
Parameters:
|
| 146 |
+
conf: Confidence of YOLOv8 model.
|
| 147 |
+
model: An instance of the `YOLOv8` class containing the YOLOv8 model.
|
| 148 |
+
|
| 149 |
+
Returns:
|
| 150 |
+
None
|
| 151 |
+
|
| 152 |
+
Raises:
|
| 153 |
+
None
|
| 154 |
+
"""
|
| 155 |
+
source_webcam = settings.WEBCAM_PATH
|
| 156 |
+
is_display_tracker = display_tracker_option()
|
| 157 |
+
if st.sidebar.button('Detect Objects'):
|
| 158 |
+
try:
|
| 159 |
+
vid_cap = cv2.VideoCapture(source_webcam)
|
| 160 |
+
st_frame = st.empty()
|
| 161 |
+
while (vid_cap.isOpened()):
|
| 162 |
+
success, image = vid_cap.read()
|
| 163 |
+
if success:
|
| 164 |
+
_display_detected_frames(conf,
|
| 165 |
+
model,
|
| 166 |
+
st_frame,
|
| 167 |
+
image,
|
| 168 |
+
is_display_tracker
|
| 169 |
+
)
|
| 170 |
+
else:
|
| 171 |
+
vid_cap.release()
|
| 172 |
+
break
|
| 173 |
+
except Exception as e:
|
| 174 |
+
st.sidebar.error("Error loading video: " + str(e))
|
| 175 |
+
|
| 176 |
+
|
| 177 |
+
def play_stored_video(conf, model):
|
| 178 |
+
"""
|
| 179 |
+
Plays a stored video file. Tracks and detects objects in real-time using the YOLOv8 object detection model.
|
| 180 |
+
|
| 181 |
+
Parameters:
|
| 182 |
+
conf: Confidence of YOLOv8 model.
|
| 183 |
+
model: An instance of the `YOLOv8` class containing the YOLOv8 model.
|
| 184 |
+
|
| 185 |
+
Returns:
|
| 186 |
+
None
|
| 187 |
+
|
| 188 |
+
Raises:
|
| 189 |
+
None
|
| 190 |
+
"""
|
| 191 |
+
source_vid = st.sidebar.selectbox(
|
| 192 |
+
"Choose a video...", settings.VIDEOS_DICT.keys())
|
| 193 |
+
|
| 194 |
+
is_display_tracker = display_tracker_option()
|
| 195 |
+
|
| 196 |
+
with open(settings.VIDEOS_DICT.get(source_vid), 'rb') as video_file:
|
| 197 |
+
video_bytes = video_file.read()
|
| 198 |
+
if video_bytes:
|
| 199 |
+
st.video(video_bytes)
|
| 200 |
+
|
| 201 |
+
if st.sidebar.button('Detect Video Objects'):
|
| 202 |
+
try:
|
| 203 |
+
vid_cap = cv2.VideoCapture(
|
| 204 |
+
str(settings.VIDEOS_DICT.get(source_vid)))
|
| 205 |
+
st_frame = st.empty()
|
| 206 |
+
while (vid_cap.isOpened()):
|
| 207 |
+
success, image = vid_cap.read()
|
| 208 |
+
if success:
|
| 209 |
+
_display_detected_frames(conf,
|
| 210 |
+
model,
|
| 211 |
+
st_frame,
|
| 212 |
+
image,
|
| 213 |
+
is_display_tracker
|
| 214 |
+
)
|
| 215 |
+
else:
|
| 216 |
+
vid_cap.release()
|
| 217 |
+
break
|
| 218 |
+
except Exception as e:
|
| 219 |
+
st.sidebar.error("Error loading video: " + str(e))
|
images/office_4.jpg
ADDED

|
images/office_4_detected.jpg
ADDED
|
settings.py
ADDED
|
@@ -0,0 +1,52 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from pathlib import Path
|
| 2 |
+
import sys
|
| 3 |
+
|
| 4 |
+
# Get the absolute path of the current file
|
| 5 |
+
file_path = Path(__file__).resolve()
|
| 6 |
+
|
| 7 |
+
# Get the parent directory of the current file
|
| 8 |
+
root_path = file_path.parent
|
| 9 |
+
|
| 10 |
+
# Add the root path to the sys.path list if it is not already there
|
| 11 |
+
if root_path not in sys.path:
|
| 12 |
+
sys.path.append(str(root_path))
|
| 13 |
+
|
| 14 |
+
# Get the relative path of the root directory with respect to the current working directory
|
| 15 |
+
ROOT = root_path.relative_to(Path.cwd())
|
| 16 |
+
|
| 17 |
+
# Sources
|
| 18 |
+
IMAGE = 'Image'
|
| 19 |
+
VIDEO = 'Video'
|
| 20 |
+
WEBCAM = 'Webcam'
|
| 21 |
+
RTSP = 'RTSP'
|
| 22 |
+
YOUTUBE = 'YouTube'
|
| 23 |
+
|
| 24 |
+
SOURCES_LIST = [IMAGE, VIDEO, WEBCAM, RTSP, YOUTUBE]
|
| 25 |
+
|
| 26 |
+
# Images config
|
| 27 |
+
IMAGES_DIR = ROOT / 'images'
|
| 28 |
+
DEFAULT_IMAGE = IMAGES_DIR / 'office_4.jpg'
|
| 29 |
+
DEFAULT_DETECT_IMAGE = IMAGES_DIR / 'office_4_detected.jpg'
|
| 30 |
+
|
| 31 |
+
# Videos config
|
| 32 |
+
VIDEO_DIR = ROOT / 'videos'
|
| 33 |
+
VIDEO_1_PATH = VIDEO_DIR / 'video_1.mp4'
|
| 34 |
+
VIDEO_2_PATH = VIDEO_DIR / 'video_2.mp4'
|
| 35 |
+
VIDEO_3_PATH = VIDEO_DIR / 'video_3.mp4'
|
| 36 |
+
VIDEO_4_PATH = VIDEO_DIR / 'video_4.mp4'
|
| 37 |
+
VIDEO_5_PATH = VIDEO_DIR / 'video_5.mp4'
|
| 38 |
+
VIDEOS_DICT = {
|
| 39 |
+
'video_1': VIDEO_1_PATH,
|
| 40 |
+
'video_2': VIDEO_2_PATH,
|
| 41 |
+
'video_3': VIDEO_3_PATH,
|
| 42 |
+
'video_4': VIDEO_4_PATH,
|
| 43 |
+
'video_5': VIDEO_5_PATH,
|
| 44 |
+
}
|
| 45 |
+
|
| 46 |
+
# ML Model config
|
| 47 |
+
MODEL_DIR = ROOT / 'weights'
|
| 48 |
+
DETECTION_MODEL = MODEL_DIR / 'yolov8n.pt'
|
| 49 |
+
SEGMENTATION_MODEL = MODEL_DIR / 'yolov8n-seg.pt'
|
| 50 |
+
|
| 51 |
+
# Webcam
|
| 52 |
+
WEBCAM_PATH = 0
|
sort.py
ADDED
|
@@ -0,0 +1,372 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from __future__ import print_function
|
| 2 |
+
from filterpy.kalman import KalmanFilter
|
| 3 |
+
import argparse
|
| 4 |
+
import time
|
| 5 |
+
import glob
|
| 6 |
+
from skimage import io
|
| 7 |
+
import matplotlib.patches as patches
|
| 8 |
+
import matplotlib.pyplot as plt
|
| 9 |
+
|
| 10 |
+
import os
|
| 11 |
+
import numpy as np
|
| 12 |
+
import matplotlib
|
| 13 |
+
matplotlib.use('TkAgg')
|
| 14 |
+
|
| 15 |
+
|
| 16 |
+
np.random.seed(0)
|
| 17 |
+
|
| 18 |
+
|
| 19 |
+
def linear_assignment(cost_matrix):
|
| 20 |
+
try:
|
| 21 |
+
import lap # linear assignment problem solver
|
| 22 |
+
_, x, y = lap.lapjv(cost_matrix, extend_cost=True)
|
| 23 |
+
return np.array([[y[i], i] for i in x if i >= 0])
|
| 24 |
+
except ImportError:
|
| 25 |
+
from scipy.optimize import linear_sum_assignment
|
| 26 |
+
x, y = linear_sum_assignment(cost_matrix)
|
| 27 |
+
return np.array(list(zip(x, y)))
|
| 28 |
+
|
| 29 |
+
|
| 30 |
+
"""From SORT: Computes IOU between two boxes in the form [x1,y1,x2,y2]"""
|
| 31 |
+
|
| 32 |
+
|
| 33 |
+
def iou_batch(bb_test, bb_gt):
|
| 34 |
+
|
| 35 |
+
bb_gt = np.expand_dims(bb_gt, 0)
|
| 36 |
+
bb_test = np.expand_dims(bb_test, 1)
|
| 37 |
+
|
| 38 |
+
xx1 = np.maximum(bb_test[..., 0], bb_gt[..., 0])
|
| 39 |
+
yy1 = np.maximum(bb_test[..., 1], bb_gt[..., 1])
|
| 40 |
+
xx2 = np.minimum(bb_test[..., 2], bb_gt[..., 2])
|
| 41 |
+
yy2 = np.minimum(bb_test[..., 3], bb_gt[..., 3])
|
| 42 |
+
w = np.maximum(0., xx2 - xx1)
|
| 43 |
+
h = np.maximum(0., yy2 - yy1)
|
| 44 |
+
wh = w * h
|
| 45 |
+
o = wh / ((bb_test[..., 2] - bb_test[..., 0]) * (bb_test[..., 3] - bb_test[..., 1])
|
| 46 |
+
+ (bb_gt[..., 2] - bb_gt[..., 0]) * (bb_gt[..., 3] - bb_gt[..., 1]) - wh)
|
| 47 |
+
return (o)
|
| 48 |
+
|
| 49 |
+
|
| 50 |
+
"""Takes a bounding box in the form [x1,y1,x2,y2] and returns z in the form [x,y,s,r] where x,y is the center of the box and s is the scale/area and r is the aspect ratio"""
|
| 51 |
+
|
| 52 |
+
|
| 53 |
+
def convert_bbox_to_z(bbox):
|
| 54 |
+
w = bbox[2] - bbox[0]
|
| 55 |
+
h = bbox[3] - bbox[1]
|
| 56 |
+
x = bbox[0] + w/2.
|
| 57 |
+
y = bbox[1] + h/2.
|
| 58 |
+
s = w * h
|
| 59 |
+
# scale is just area
|
| 60 |
+
r = w / float(h)
|
| 61 |
+
return np.array([x, y, s, r]).reshape((4, 1))
|
| 62 |
+
|
| 63 |
+
|
| 64 |
+
"""Takes a bounding box in the centre form [x,y,s,r] and returns it in the form
|
| 65 |
+
[x1,y1,x2,y2] where x1,y1 is the top left and x2,y2 is the bottom right"""
|
| 66 |
+
|
| 67 |
+
|
| 68 |
+
def convert_x_to_bbox(x, score=None):
|
| 69 |
+
w = np.sqrt(x[2] * x[3])
|
| 70 |
+
h = x[2] / w
|
| 71 |
+
if (score == None):
|
| 72 |
+
return np.array([x[0]-w/2., x[1]-h/2., x[0]+w/2., x[1]+h/2.]).reshape((1, 4))
|
| 73 |
+
else:
|
| 74 |
+
return np.array([x[0]-w/2., x[1]-h/2., x[0]+w/2., x[1]+h/2., score]).reshape((1, 5))
|
| 75 |
+
|
| 76 |
+
|
| 77 |
+
"""This class represents the internal state of individual tracked objects observed as bbox."""
|
| 78 |
+
|
| 79 |
+
|
| 80 |
+
class KalmanBoxTracker(object):
|
| 81 |
+
|
| 82 |
+
count = 0
|
| 83 |
+
|
| 84 |
+
def __init__(self, bbox):
|
| 85 |
+
"""
|
| 86 |
+
Initialize a tracker using initial bounding box
|
| 87 |
+
|
| 88 |
+
Parameter 'bbox' must have 'detected class' int number at the -1 position.
|
| 89 |
+
"""
|
| 90 |
+
self.kf = KalmanFilter(dim_x=7, dim_z=4)
|
| 91 |
+
self.kf.F = np.array([[1, 0, 0, 0, 1, 0, 0], [0, 1, 0, 0, 0, 1, 0], [0, 0, 1, 0, 0, 0, 1], [
|
| 92 |
+
0, 0, 0, 1, 0, 0, 0], [0, 0, 0, 0, 1, 0, 0], [0, 0, 0, 0, 0, 1, 0], [0, 0, 0, 0, 0, 0, 1]])
|
| 93 |
+
self.kf.H = np.array([[1, 0, 0, 0, 0, 0, 0], [0, 1, 0, 0, 0, 0, 0], [
|
| 94 |
+
0, 0, 1, 0, 0, 0, 0], [0, 0, 0, 1, 0, 0, 0]])
|
| 95 |
+
|
| 96 |
+
self.kf.R[2:,
|
| 97 |
+
2:] *= 10. # R: Covariance matrix of measurement noise (set to high for noisy inputs -> more 'inertia' of boxes')
|
| 98 |
+
self.kf.P[4:, 4:] *= 1000. # give high uncertainty to the unobservable initial velocities
|
| 99 |
+
self.kf.P *= 10.
|
| 100 |
+
# Q: Covariance matrix of process noise (set to high for erratically moving things)
|
| 101 |
+
self.kf.Q[-1, -1] *= 0.5
|
| 102 |
+
self.kf.Q[4:, 4:] *= 0.5
|
| 103 |
+
|
| 104 |
+
self.kf.x[:4] = convert_bbox_to_z(bbox) # STATE VECTOR
|
| 105 |
+
self.time_since_update = 0
|
| 106 |
+
self.id = KalmanBoxTracker.count
|
| 107 |
+
KalmanBoxTracker.count += 1
|
| 108 |
+
self.history = []
|
| 109 |
+
self.hits = 0
|
| 110 |
+
self.hit_streak = 0
|
| 111 |
+
self.age = 0
|
| 112 |
+
self.centroidarr = []
|
| 113 |
+
CX = (bbox[0]+bbox[2])//2
|
| 114 |
+
CY = (bbox[1]+bbox[3])//2
|
| 115 |
+
self.centroidarr.append((CX, CY))
|
| 116 |
+
|
| 117 |
+
# keep yolov5 detected class information
|
| 118 |
+
self.detclass = bbox[5]
|
| 119 |
+
|
| 120 |
+
def update(self, bbox):
|
| 121 |
+
"""
|
| 122 |
+
Updates the state vector with observed bbox
|
| 123 |
+
"""
|
| 124 |
+
self.time_since_update = 0
|
| 125 |
+
self.history = []
|
| 126 |
+
self.hits += 1
|
| 127 |
+
self.hit_streak += 1
|
| 128 |
+
self.kf.update(convert_bbox_to_z(bbox))
|
| 129 |
+
self.detclass = bbox[5]
|
| 130 |
+
CX = (bbox[0]+bbox[2])//2
|
| 131 |
+
CY = (bbox[1]+bbox[3])//2
|
| 132 |
+
self.centroidarr.append((CX, CY))
|
| 133 |
+
|
| 134 |
+
def predict(self):
|
| 135 |
+
"""
|
| 136 |
+
Advances the state vector and returns the predicted bounding box estimate
|
| 137 |
+
"""
|
| 138 |
+
if ((self.kf.x[6]+self.kf.x[2]) <= 0):
|
| 139 |
+
self.kf.x[6] *= 0.0
|
| 140 |
+
self.kf.predict()
|
| 141 |
+
self.age += 1
|
| 142 |
+
if (self.time_since_update > 0):
|
| 143 |
+
self.hit_streak = 0
|
| 144 |
+
self.time_since_update += 1
|
| 145 |
+
self.history.append(convert_x_to_bbox(self.kf.x))
|
| 146 |
+
# bbox=self.history[-1]
|
| 147 |
+
# CX = (bbox[0]+bbox[2])/2
|
| 148 |
+
# CY = (bbox[1]+bbox[3])/2
|
| 149 |
+
# self.centroidarr.append((CX,CY))
|
| 150 |
+
|
| 151 |
+
return self.history[-1]
|
| 152 |
+
|
| 153 |
+
def get_state(self):
|
| 154 |
+
"""
|
| 155 |
+
Returns the current bounding box estimate
|
| 156 |
+
# test
|
| 157 |
+
arr1 = np.array([[1,2,3,4]])
|
| 158 |
+
arr2 = np.array([0])
|
| 159 |
+
arr3 = np.expand_dims(arr2, 0)
|
| 160 |
+
np.concatenate((arr1,arr3), axis=1)
|
| 161 |
+
"""
|
| 162 |
+
arr_detclass = np.expand_dims(np.array([self.detclass]), 0)
|
| 163 |
+
|
| 164 |
+
arr_u_dot = np.expand_dims(self.kf.x[4], 0)
|
| 165 |
+
arr_v_dot = np.expand_dims(self.kf.x[5], 0)
|
| 166 |
+
arr_s_dot = np.expand_dims(self.kf.x[6], 0)
|
| 167 |
+
|
| 168 |
+
return np.concatenate((convert_x_to_bbox(self.kf.x), arr_detclass, arr_u_dot, arr_v_dot, arr_s_dot), axis=1)
|
| 169 |
+
|
| 170 |
+
|
| 171 |
+
def associate_detections_to_trackers(detections, trackers, iou_threshold=0.3):
|
| 172 |
+
"""
|
| 173 |
+
Assigns detections to tracked object (both represented as bounding boxes)
|
| 174 |
+
Returns 3 lists of
|
| 175 |
+
1. matches,
|
| 176 |
+
2. unmatched_detections
|
| 177 |
+
3. unmatched_trackers
|
| 178 |
+
"""
|
| 179 |
+
if (len(trackers) == 0):
|
| 180 |
+
return np.empty((0, 2), dtype=int), np.arange(len(detections)), np.empty((0, 5), dtype=int)
|
| 181 |
+
|
| 182 |
+
iou_matrix = iou_batch(detections, trackers)
|
| 183 |
+
|
| 184 |
+
if min(iou_matrix.shape) > 0:
|
| 185 |
+
a = (iou_matrix > iou_threshold).astype(np.int32)
|
| 186 |
+
if a.sum(1).max() == 1 and a.sum(0).max() == 1:
|
| 187 |
+
matched_indices = np.stack(np.where(a), axis=1)
|
| 188 |
+
else:
|
| 189 |
+
matched_indices = linear_assignment(-iou_matrix)
|
| 190 |
+
else:
|
| 191 |
+
matched_indices = np.empty(shape=(0, 2))
|
| 192 |
+
|
| 193 |
+
unmatched_detections = []
|
| 194 |
+
for d, det in enumerate(detections):
|
| 195 |
+
if (d not in matched_indices[:, 0]):
|
| 196 |
+
unmatched_detections.append(d)
|
| 197 |
+
|
| 198 |
+
unmatched_trackers = []
|
| 199 |
+
for t, trk in enumerate(trackers):
|
| 200 |
+
if (t not in matched_indices[:, 1]):
|
| 201 |
+
unmatched_trackers.append(t)
|
| 202 |
+
|
| 203 |
+
# filter out matched with low IOU
|
| 204 |
+
matches = []
|
| 205 |
+
for m in matched_indices:
|
| 206 |
+
if (iou_matrix[m[0], m[1]] < iou_threshold):
|
| 207 |
+
unmatched_detections.append(m[0])
|
| 208 |
+
unmatched_trackers.append(m[1])
|
| 209 |
+
else:
|
| 210 |
+
matches.append(m.reshape(1, 2))
|
| 211 |
+
|
| 212 |
+
if (len(matches) == 0):
|
| 213 |
+
matches = np.empty((0, 2), dtype=int)
|
| 214 |
+
else:
|
| 215 |
+
matches = np.concatenate(matches, axis=0)
|
| 216 |
+
|
| 217 |
+
return matches, np.array(unmatched_detections), np.array(unmatched_trackers)
|
| 218 |
+
|
| 219 |
+
|
| 220 |
+
class Sort(object):
|
| 221 |
+
def __init__(self, max_age=1, min_hits=3, iou_threshold=0.3):
|
| 222 |
+
"""
|
| 223 |
+
Parameters for SORT
|
| 224 |
+
"""
|
| 225 |
+
self.max_age = max_age
|
| 226 |
+
self.min_hits = min_hits
|
| 227 |
+
self.iou_threshold = iou_threshold
|
| 228 |
+
self.trackers = []
|
| 229 |
+
self.frame_count = 0
|
| 230 |
+
|
| 231 |
+
def getTrackers(self,):
|
| 232 |
+
return self.trackers
|
| 233 |
+
|
| 234 |
+
def update(self, dets=np.empty((0, 6))):
|
| 235 |
+
"""
|
| 236 |
+
Parameters:
|
| 237 |
+
'dets' - a numpy array of detection in the format [[x1, y1, x2, y2, score], [x1,y1,x2,y2,score],...]
|
| 238 |
+
|
| 239 |
+
Ensure to call this method even frame has no detections. (pass np.empty((0,5)))
|
| 240 |
+
|
| 241 |
+
Returns a similar array, where the last column is object ID (replacing confidence score)
|
| 242 |
+
|
| 243 |
+
NOTE: The number of objects returned may differ from the number of objects provided.
|
| 244 |
+
"""
|
| 245 |
+
self.frame_count += 1
|
| 246 |
+
|
| 247 |
+
# Get predicted locations from existing trackers
|
| 248 |
+
trks = np.zeros((len(self.trackers), 6))
|
| 249 |
+
to_del = []
|
| 250 |
+
ret = []
|
| 251 |
+
for t, trk in enumerate(trks):
|
| 252 |
+
pos = self.trackers[t].predict()[0]
|
| 253 |
+
trk[:] = [pos[0], pos[1], pos[2], pos[3], 0, 0]
|
| 254 |
+
if np.any(np.isnan(pos)):
|
| 255 |
+
to_del.append(t)
|
| 256 |
+
trks = np.ma.compress_rows(np.ma.masked_invalid(trks))
|
| 257 |
+
for t in reversed(to_del):
|
| 258 |
+
self.trackers.pop(t)
|
| 259 |
+
matched, unmatched_dets, unmatched_trks = associate_detections_to_trackers(
|
| 260 |
+
dets, trks, self.iou_threshold)
|
| 261 |
+
|
| 262 |
+
# Update matched trackers with assigned detections
|
| 263 |
+
for m in matched:
|
| 264 |
+
self.trackers[m[1]].update(dets[m[0], :])
|
| 265 |
+
|
| 266 |
+
# Create and initialize new trackers for unmatched detections
|
| 267 |
+
for i in unmatched_dets:
|
| 268 |
+
trk = KalmanBoxTracker(np.hstack((dets[i, :], np.array([0]))))
|
| 269 |
+
# trk = KalmanBoxTracker(np.hstack(dets[i,:])
|
| 270 |
+
self.trackers.append(trk)
|
| 271 |
+
|
| 272 |
+
i = len(self.trackers)
|
| 273 |
+
for trk in reversed(self.trackers):
|
| 274 |
+
d = trk.get_state()[0]
|
| 275 |
+
if (trk.time_since_update < 1) and (trk.hit_streak >= self.min_hits or self.frame_count <= self.min_hits):
|
| 276 |
+
# +1'd because MOT benchmark requires positive value
|
| 277 |
+
ret.append(np.concatenate((d, [trk.id+1])).reshape(1, -1))
|
| 278 |
+
i -= 1
|
| 279 |
+
# remove dead tracklet
|
| 280 |
+
if (trk.time_since_update > self.max_age):
|
| 281 |
+
self.trackers.pop(i)
|
| 282 |
+
if (len(ret) > 0):
|
| 283 |
+
return np.concatenate(ret)
|
| 284 |
+
return np.empty((0, 6))
|
| 285 |
+
|
| 286 |
+
|
| 287 |
+
def parse_args():
|
| 288 |
+
"""Parse input arguments."""
|
| 289 |
+
parser = argparse.ArgumentParser(description='SORT demo')
|
| 290 |
+
parser.add_argument('--display', dest='display',
|
| 291 |
+
help='Display online tracker output (slow) [False]', action='store_true')
|
| 292 |
+
parser.add_argument(
|
| 293 |
+
"--seq_path", help="Path to detections.", type=str, default='data')
|
| 294 |
+
parser.add_argument(
|
| 295 |
+
"--phase", help="Subdirectory in seq_path.", type=str, default='train')
|
| 296 |
+
parser.add_argument("--max_age",
|
| 297 |
+
help="Maximum number of frames to keep alive a track without associated detections.",
|
| 298 |
+
type=int, default=1)
|
| 299 |
+
parser.add_argument("--min_hits",
|
| 300 |
+
help="Minimum number of associated detections before track is initialised.",
|
| 301 |
+
type=int, default=3)
|
| 302 |
+
parser.add_argument("--iou_threshold",
|
| 303 |
+
help="Minimum IOU for match.", type=float, default=0.3)
|
| 304 |
+
args = parser.parse_args()
|
| 305 |
+
return args
|
| 306 |
+
|
| 307 |
+
|
| 308 |
+
if __name__ == '__main__':
|
| 309 |
+
# all train
|
| 310 |
+
args = parse_args()
|
| 311 |
+
display = args.display
|
| 312 |
+
phase = args.phase
|
| 313 |
+
total_time = 0.0
|
| 314 |
+
total_frames = 0
|
| 315 |
+
colours = np.random.rand(32, 3) # used only for display
|
| 316 |
+
if (display):
|
| 317 |
+
if not os.path.exists('mot_benchmark'):
|
| 318 |
+
print('\n\tERROR: mot_benchmark link not found!\n\n Create a symbolic link to the MOT benchmark\n (https://motchallenge.net/data/2D_MOT_2015/#download). E.g.:\n\n $ ln -s /path/to/MOT2015_challenge/2DMOT2015 mot_benchmark\n\n')
|
| 319 |
+
exit()
|
| 320 |
+
plt.ion()
|
| 321 |
+
fig = plt.figure()
|
| 322 |
+
ax1 = fig.add_subplot(111, aspect='equal')
|
| 323 |
+
|
| 324 |
+
if not os.path.exists('output'):
|
| 325 |
+
os.makedirs('output')
|
| 326 |
+
pattern = os.path.join(args.seq_path, phase, '*', 'det', 'det.txt')
|
| 327 |
+
for seq_dets_fn in glob.glob(pattern):
|
| 328 |
+
mot_tracker = Sort(max_age=args.max_age,
|
| 329 |
+
min_hits=args.min_hits,
|
| 330 |
+
iou_threshold=args.iou_threshold) # create instance of the SORT tracker
|
| 331 |
+
seq_dets = np.loadtxt(seq_dets_fn, delimiter=',')
|
| 332 |
+
seq = seq_dets_fn[pattern.find('*'):].split(os.path.sep)[0]
|
| 333 |
+
|
| 334 |
+
with open(os.path.join('output', '%s.txt' % (seq)), 'w') as out_file:
|
| 335 |
+
print("Processing %s." % (seq))
|
| 336 |
+
for frame in range(int(seq_dets[:, 0].max())):
|
| 337 |
+
frame += 1 # detection and frame numbers begin at 1
|
| 338 |
+
dets = seq_dets[seq_dets[:, 0] == frame, 2:7]
|
| 339 |
+
# convert to [x1,y1,w,h] to [x1,y1,x2,y2]
|
| 340 |
+
dets[:, 2:4] += dets[:, 0:2]
|
| 341 |
+
total_frames += 1
|
| 342 |
+
|
| 343 |
+
if (display):
|
| 344 |
+
fn = os.path.join('mot_benchmark', phase, seq,
|
| 345 |
+
'img1', '%06d.jpg' % (frame))
|
| 346 |
+
im = io.imread(fn)
|
| 347 |
+
ax1.imshow(im)
|
| 348 |
+
plt.title(seq + ' Tracked Targets')
|
| 349 |
+
|
| 350 |
+
start_time = time.time()
|
| 351 |
+
trackers = mot_tracker.update(dets)
|
| 352 |
+
cycle_time = time.time() - start_time
|
| 353 |
+
total_time += cycle_time
|
| 354 |
+
|
| 355 |
+
for d in trackers:
|
| 356 |
+
print('%d,%d,%.2f,%.2f,%.2f,%.2f,1,-1,-1,-1' %
|
| 357 |
+
(frame, d[4], d[0], d[1], d[2]-d[0], d[3]-d[1]), file=out_file)
|
| 358 |
+
if (display):
|
| 359 |
+
d = d.astype(np.int32)
|
| 360 |
+
ax1.add_patch(patches.Rectangle(
|
| 361 |
+
(d[0], d[1]), d[2]-d[0], d[3]-d[1], fill=False, lw=3, ec=colours[d[4] % 32, :]))
|
| 362 |
+
|
| 363 |
+
if (display):
|
| 364 |
+
fig.canvas.flush_events()
|
| 365 |
+
plt.draw()
|
| 366 |
+
ax1.cla()
|
| 367 |
+
|
| 368 |
+
print("Total Tracking took: %.3f seconds for %d frames or %.1f FPS" %
|
| 369 |
+
(total_time, total_frames, total_frames / total_time))
|
| 370 |
+
|
| 371 |
+
if (display):
|
| 372 |
+
print("Note: to get real runtime results run without the option: --display")
|
tracker.py
ADDED
|
@@ -0,0 +1,116 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import cv2
|
| 2 |
+
import numpy as np
|
| 3 |
+
|
| 4 |
+
from sort import Sort
|
| 5 |
+
|
| 6 |
+
# SORT tracking algorithm initialization
|
| 7 |
+
sort_max_age = 50
|
| 8 |
+
sort_min_hits = 2
|
| 9 |
+
sort_iou_thresh = 0.2
|
| 10 |
+
sort_tracker = Sort(max_age=sort_max_age,
|
| 11 |
+
min_hits=sort_min_hits,
|
| 12 |
+
iou_threshold=sort_iou_thresh)
|
| 13 |
+
track_color_id = 0
|
| 14 |
+
|
| 15 |
+
# Sorting algorithm
|
| 16 |
+
'''Computer Color for every box and track'''
|
| 17 |
+
palette = (2 ** 11 - 1, 2 ** 15 - 1, 2 ** 20 - 1)
|
| 18 |
+
|
| 19 |
+
|
| 20 |
+
def compute_color_for_labels(label):
|
| 21 |
+
color = [int(int(p * (label ** 2 - label + 1)) % 255) for p in palette]
|
| 22 |
+
return tuple(color)
|
| 23 |
+
|
| 24 |
+
|
| 25 |
+
"""" Calculates the relative bounding box from absolute pixel values. """
|
| 26 |
+
|
| 27 |
+
|
| 28 |
+
def bbox_rel(*xyxy):
|
| 29 |
+
bbox_left = min([xyxy[0].item(), xyxy[2].item()])
|
| 30 |
+
bbox_top = min([xyxy[1].item(), xyxy[3].item()])
|
| 31 |
+
bbox_w = abs(xyxy[0].item() - xyxy[2].item())
|
| 32 |
+
bbox_h = abs(xyxy[1].item() - xyxy[3].item())
|
| 33 |
+
x_c = (bbox_left + bbox_w / 2)
|
| 34 |
+
y_c = (bbox_top + bbox_h / 2)
|
| 35 |
+
w = bbox_w
|
| 36 |
+
h = bbox_h
|
| 37 |
+
return x_c, y_c, w, h
|
| 38 |
+
|
| 39 |
+
|
| 40 |
+
"""Function to Draw Bounding boxes"""
|
| 41 |
+
|
| 42 |
+
|
| 43 |
+
def draw_boxes(img, bbox, identities=None, categories=None,
|
| 44 |
+
names=None, color_box=None, offset=(0, 0)):
|
| 45 |
+
for i, box in enumerate(bbox):
|
| 46 |
+
x1, y1, x2, y2 = [int(i) for i in box]
|
| 47 |
+
x1 += offset[0]
|
| 48 |
+
x2 += offset[0]
|
| 49 |
+
y1 += offset[1]
|
| 50 |
+
y2 += offset[1]
|
| 51 |
+
cat = int(categories[i]) if categories is not None else 0
|
| 52 |
+
id = int(identities[i]) if identities is not None else 0
|
| 53 |
+
data = (int((box[0]+box[2])/2), (int((box[1]+box[3])/2)))
|
| 54 |
+
label = str(id)
|
| 55 |
+
|
| 56 |
+
if color_box:
|
| 57 |
+
color = compute_color_for_labels(id)
|
| 58 |
+
(w, h), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.6, 1)
|
| 59 |
+
cv2.rectangle(img, (x1, y1), (x2, y2), color, 2)
|
| 60 |
+
cv2.rectangle(img, (x1, y1 - 20), (x1 + w, y1), (255, 191, 0), -1)
|
| 61 |
+
cv2.putText(img, label, (x1, y1 - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.6,
|
| 62 |
+
[255, 255, 255], 1)
|
| 63 |
+
cv2.circle(img, data, 3, color, -1)
|
| 64 |
+
else:
|
| 65 |
+
(w, h), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.6, 1)
|
| 66 |
+
cv2.rectangle(img, (x1, y1), (x2, y2), (255, 191, 0), 2)
|
| 67 |
+
# cv2.rectangle(img, (x1, y1 - 20), (x1 + w, y1), (255, 191, 0), -1)
|
| 68 |
+
# cv2.putText(img, label, (x1, y1 - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.6,
|
| 69 |
+
# [255, 255, 255], 1)
|
| 70 |
+
cv2.rectangle(img, (x1, y1 - 3*h), (x1 + w, y1), (255, 191, 0), -1)
|
| 71 |
+
cv2.putText(img, label, (x1, y1 - 2*h), cv2.FONT_HERSHEY_SIMPLEX, 0.6,
|
| 72 |
+
[255, 255, 255], 1)
|
| 73 |
+
cv2.circle(img, data, 3, (255, 191, 0), -1)
|
| 74 |
+
return img
|
| 75 |
+
|
| 76 |
+
|
| 77 |
+
def _display_detected_tracks(dets, img, color_box=None):
|
| 78 |
+
# pass an empty array to sort
|
| 79 |
+
dets_to_sort = np.empty((0, 6))
|
| 80 |
+
|
| 81 |
+
# NOTE: We send in detected object class too
|
| 82 |
+
for x1, y1, x2, y2, conf, detclass in dets.cpu().detach().numpy():
|
| 83 |
+
# for x1, y1, x2, y2, conf, detclass in dets.cpu().detach().numpy():
|
| 84 |
+
dets_to_sort = np.vstack((dets_to_sort,
|
| 85 |
+
np.array([x1, y1, x2, y2,
|
| 86 |
+
conf, detclass])))
|
| 87 |
+
|
| 88 |
+
# Run SORT
|
| 89 |
+
tracked_dets = sort_tracker.update(dets_to_sort)
|
| 90 |
+
# tracks = sort_tracker.getTrackers()
|
| 91 |
+
|
| 92 |
+
# loop over tracks
|
| 93 |
+
# for track in tracks:
|
| 94 |
+
# if color_box:
|
| 95 |
+
# color = compute_color_for_labels(track_color_id)
|
| 96 |
+
# [cv2.line(img, (int(track.centroidarr[i][0]), int(track.centroidarr[i][1])),
|
| 97 |
+
# (int(track.centroidarr[i+1][0]),
|
| 98 |
+
# int(track.centroidarr[i+1][1])),
|
| 99 |
+
# color, thickness=3) for i, _ in enumerate(track.centroidarr)
|
| 100 |
+
# if i < len(track.centroidarr)-1]
|
| 101 |
+
# track_color_id = track_color_id+1
|
| 102 |
+
# else:
|
| 103 |
+
# [cv2.line(img, (int(track.centroidarr[i][0]), int(track.centroidarr[i][1])),
|
| 104 |
+
# (int(track.centroidarr[i+1][0]),
|
| 105 |
+
# int(track.centroidarr[i+1][1])),
|
| 106 |
+
# (124, 252, 0), thickness=3) for i, _ in enumerate(track.centroidarr)
|
| 107 |
+
# if i < len(track.centroidarr)-1]
|
| 108 |
+
|
| 109 |
+
# draw boxes for visualization
|
| 110 |
+
if len(tracked_dets) > 0:
|
| 111 |
+
bbox_xyxy = tracked_dets[:, :4]
|
| 112 |
+
identities = tracked_dets[:, 8]
|
| 113 |
+
categories = tracked_dets[:, 4]
|
| 114 |
+
names = None
|
| 115 |
+
draw_boxes(img, bbox_xyxy, identities,
|
| 116 |
+
categories, names, color_box)
|
weights/yolov8n-seg.pt
ADDED
|
@@ -0,0 +1,3 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
version https://git-lfs.github.com/spec/v1
|
| 2 |
+
oid sha256:d39e867b2c3a5dbc1aa764411544b475cb14727bf6af1ec46c238f8bb1351ab9
|
| 3 |
+
size 7054355
|
weights/yolov8n.pt
ADDED
|
@@ -0,0 +1,3 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
version https://git-lfs.github.com/spec/v1
|
| 2 |
+
oid sha256:31e20dde3def09e2cf938c7be6fe23d9150bbbe503982af13345706515f2ef95
|
| 3 |
+
size 6534387
|