Spaces:
Runtime error

Runtime error
first upload
Browse filesThis view is limited to 50 files because it contains too many changes.
See raw diff
- LICENSE +201 -0
- README.md +214 -12
- app.py +59 -0
- configs/stable-diffusion/app.yaml +87 -0
- configs/stable-diffusion/test_keypose.yaml +87 -0
- configs/stable-diffusion/test_mask.yaml +87 -0
- configs/stable-diffusion/test_mask_sketch.yaml +87 -0
- configs/stable-diffusion/test_sketch.yaml +87 -0
- configs/stable-diffusion/test_sketch_edit.yaml +87 -0
- configs/stable-diffusion/train_keypose.yaml +87 -0
- configs/stable-diffusion/train_mask.yaml +87 -0
- configs/stable-diffusion/train_sketch.yaml +87 -0
- dataset_coco.py +138 -0
- demo/demos.py +82 -0
- demo/model.py +390 -0
- dist_util.py +91 -0
- environment.yaml +31 -0
- examples/edit_cat/edge.png +0 -0
- examples/edit_cat/edge_2.png +0 -0
- examples/edit_cat/im.png +0 -0
- examples/edit_cat/mask.png +0 -0
- examples/keypose/iron.png +0 -0
- examples/seg/dinner.png +0 -0
- examples/seg/motor.png +0 -0
- examples/seg_sketch/edge.png +0 -0
- examples/seg_sketch/mask.png +0 -0
- examples/sketch/car.png +0 -0
- examples/sketch/girl.jpeg +0 -0
- examples/sketch/human.png +0 -0
- examples/sketch/scenery.jpg +0 -0
- examples/sketch/scenery2.jpg +0 -0
- experiments/README.md +0 -0
- gradio_keypose.py +254 -0
- gradio_sketch.py +147 -0
- ldm/data/__init__.py +0 -0
- ldm/data/base.py +23 -0
- ldm/data/imagenet.py +394 -0
- ldm/data/lsun.py +92 -0
- ldm/lr_scheduler.py +98 -0
- ldm/models/autoencoder.py +443 -0
- ldm/models/diffusion/__init__.py +0 -0
- ldm/models/diffusion/classifier.py +267 -0
- ldm/models/diffusion/ddim.py +241 -0
- ldm/models/diffusion/ddpm.py +1446 -0
- ldm/models/diffusion/dpm_solver/__init__.py +1 -0
- ldm/models/diffusion/dpm_solver/dpm_solver.py +1184 -0
- ldm/models/diffusion/dpm_solver/sampler.py +82 -0
- ldm/models/diffusion/plms.py +254 -0
- ldm/modules/attention.py +261 -0
- ldm/modules/diffusionmodules/__init__.py +0 -0
LICENSE
ADDED
|
@@ -0,0 +1,201 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
Apache License
|
| 2 |
+
Version 2.0, January 2004
|
| 3 |
+
http://www.apache.org/licenses/
|
| 4 |
+
|
| 5 |
+
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
|
| 6 |
+
|
| 7 |
+
1. Definitions.
|
| 8 |
+
|
| 9 |
+
"License" shall mean the terms and conditions for use, reproduction,
|
| 10 |
+
and distribution as defined by Sections 1 through 9 of this document.
|
| 11 |
+
|
| 12 |
+
"Licensor" shall mean the copyright owner or entity authorized by
|
| 13 |
+
the copyright owner that is granting the License.
|
| 14 |
+
|
| 15 |
+
"Legal Entity" shall mean the union of the acting entity and all
|
| 16 |
+
other entities that control, are controlled by, or are under common
|
| 17 |
+
control with that entity. For the purposes of this definition,
|
| 18 |
+
"control" means (i) the power, direct or indirect, to cause the
|
| 19 |
+
direction or management of such entity, whether by contract or
|
| 20 |
+
otherwise, or (ii) ownership of fifty percent (50%) or more of the
|
| 21 |
+
outstanding shares, or (iii) beneficial ownership of such entity.
|
| 22 |
+
|
| 23 |
+
"You" (or "Your") shall mean an individual or Legal Entity
|
| 24 |
+
exercising permissions granted by this License.
|
| 25 |
+
|
| 26 |
+
"Source" form shall mean the preferred form for making modifications,
|
| 27 |
+
including but not limited to software source code, documentation
|
| 28 |
+
source, and configuration files.
|
| 29 |
+
|
| 30 |
+
"Object" form shall mean any form resulting from mechanical
|
| 31 |
+
transformation or translation of a Source form, including but
|
| 32 |
+
not limited to compiled object code, generated documentation,
|
| 33 |
+
and conversions to other media types.
|
| 34 |
+
|
| 35 |
+
"Work" shall mean the work of authorship, whether in Source or
|
| 36 |
+
Object form, made available under the License, as indicated by a
|
| 37 |
+
copyright notice that is included in or attached to the work
|
| 38 |
+
(an example is provided in the Appendix below).
|
| 39 |
+
|
| 40 |
+
"Derivative Works" shall mean any work, whether in Source or Object
|
| 41 |
+
form, that is based on (or derived from) the Work and for which the
|
| 42 |
+
editorial revisions, annotations, elaborations, or other modifications
|
| 43 |
+
represent, as a whole, an original work of authorship. For the purposes
|
| 44 |
+
of this License, Derivative Works shall not include works that remain
|
| 45 |
+
separable from, or merely link (or bind by name) to the interfaces of,
|
| 46 |
+
the Work and Derivative Works thereof.
|
| 47 |
+
|
| 48 |
+
"Contribution" shall mean any work of authorship, including
|
| 49 |
+
the original version of the Work and any modifications or additions
|
| 50 |
+
to that Work or Derivative Works thereof, that is intentionally
|
| 51 |
+
submitted to Licensor for inclusion in the Work by the copyright owner
|
| 52 |
+
or by an individual or Legal Entity authorized to submit on behalf of
|
| 53 |
+
the copyright owner. For the purposes of this definition, "submitted"
|
| 54 |
+
means any form of electronic, verbal, or written communication sent
|
| 55 |
+
to the Licensor or its representatives, including but not limited to
|
| 56 |
+
communication on electronic mailing lists, source code control systems,
|
| 57 |
+
and issue tracking systems that are managed by, or on behalf of, the
|
| 58 |
+
Licensor for the purpose of discussing and improving the Work, but
|
| 59 |
+
excluding communication that is conspicuously marked or otherwise
|
| 60 |
+
designated in writing by the copyright owner as "Not a Contribution."
|
| 61 |
+
|
| 62 |
+
"Contributor" shall mean Licensor and any individual or Legal Entity
|
| 63 |
+
on behalf of whom a Contribution has been received by Licensor and
|
| 64 |
+
subsequently incorporated within the Work.
|
| 65 |
+
|
| 66 |
+
2. Grant of Copyright License. Subject to the terms and conditions of
|
| 67 |
+
this License, each Contributor hereby grants to You a perpetual,
|
| 68 |
+
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
| 69 |
+
copyright license to reproduce, prepare Derivative Works of,
|
| 70 |
+
publicly display, publicly perform, sublicense, and distribute the
|
| 71 |
+
Work and such Derivative Works in Source or Object form.
|
| 72 |
+
|
| 73 |
+
3. Grant of Patent License. Subject to the terms and conditions of
|
| 74 |
+
this License, each Contributor hereby grants to You a perpetual,
|
| 75 |
+
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
|
| 76 |
+
(except as stated in this section) patent license to make, have made,
|
| 77 |
+
use, offer to sell, sell, import, and otherwise transfer the Work,
|
| 78 |
+
where such license applies only to those patent claims licensable
|
| 79 |
+
by such Contributor that are necessarily infringed by their
|
| 80 |
+
Contribution(s) alone or by combination of their Contribution(s)
|
| 81 |
+
with the Work to which such Contribution(s) was submitted. If You
|
| 82 |
+
institute patent litigation against any entity (including a
|
| 83 |
+
cross-claim or counterclaim in a lawsuit) alleging that the Work
|
| 84 |
+
or a Contribution incorporated within the Work constitutes direct
|
| 85 |
+
or contributory patent infringement, then any patent licenses
|
| 86 |
+
granted to You under this License for that Work shall terminate
|
| 87 |
+
as of the date such litigation is filed.
|
| 88 |
+
|
| 89 |
+
4. Redistribution. You may reproduce and distribute copies of the
|
| 90 |
+
Work or Derivative Works thereof in any medium, with or without
|
| 91 |
+
modifications, and in Source or Object form, provided that You
|
| 92 |
+
meet the following conditions:
|
| 93 |
+
|
| 94 |
+
(a) You must give any other recipients of the Work or
|
| 95 |
+
Derivative Works a copy of this License; and
|
| 96 |
+
|
| 97 |
+
(b) You must cause any modified files to carry prominent notices
|
| 98 |
+
stating that You changed the files; and
|
| 99 |
+
|
| 100 |
+
(c) You must retain, in the Source form of any Derivative Works
|
| 101 |
+
that You distribute, all copyright, patent, trademark, and
|
| 102 |
+
attribution notices from the Source form of the Work,
|
| 103 |
+
excluding those notices that do not pertain to any part of
|
| 104 |
+
the Derivative Works; and
|
| 105 |
+
|
| 106 |
+
(d) If the Work includes a "NOTICE" text file as part of its
|
| 107 |
+
distribution, then any Derivative Works that You distribute must
|
| 108 |
+
include a readable copy of the attribution notices contained
|
| 109 |
+
within such NOTICE file, excluding those notices that do not
|
| 110 |
+
pertain to any part of the Derivative Works, in at least one
|
| 111 |
+
of the following places: within a NOTICE text file distributed
|
| 112 |
+
as part of the Derivative Works; within the Source form or
|
| 113 |
+
documentation, if provided along with the Derivative Works; or,
|
| 114 |
+
within a display generated by the Derivative Works, if and
|
| 115 |
+
wherever such third-party notices normally appear. The contents
|
| 116 |
+
of the NOTICE file are for informational purposes only and
|
| 117 |
+
do not modify the License. You may add Your own attribution
|
| 118 |
+
notices within Derivative Works that You distribute, alongside
|
| 119 |
+
or as an addendum to the NOTICE text from the Work, provided
|
| 120 |
+
that such additional attribution notices cannot be construed
|
| 121 |
+
as modifying the License.
|
| 122 |
+
|
| 123 |
+
You may add Your own copyright statement to Your modifications and
|
| 124 |
+
may provide additional or different license terms and conditions
|
| 125 |
+
for use, reproduction, or distribution of Your modifications, or
|
| 126 |
+
for any such Derivative Works as a whole, provided Your use,
|
| 127 |
+
reproduction, and distribution of the Work otherwise complies with
|
| 128 |
+
the conditions stated in this License.
|
| 129 |
+
|
| 130 |
+
5. Submission of Contributions. Unless You explicitly state otherwise,
|
| 131 |
+
any Contribution intentionally submitted for inclusion in the Work
|
| 132 |
+
by You to the Licensor shall be under the terms and conditions of
|
| 133 |
+
this License, without any additional terms or conditions.
|
| 134 |
+
Notwithstanding the above, nothing herein shall supersede or modify
|
| 135 |
+
the terms of any separate license agreement you may have executed
|
| 136 |
+
with Licensor regarding such Contributions.
|
| 137 |
+
|
| 138 |
+
6. Trademarks. This License does not grant permission to use the trade
|
| 139 |
+
names, trademarks, service marks, or product names of the Licensor,
|
| 140 |
+
except as required for reasonable and customary use in describing the
|
| 141 |
+
origin of the Work and reproducing the content of the NOTICE file.
|
| 142 |
+
|
| 143 |
+
7. Disclaimer of Warranty. Unless required by applicable law or
|
| 144 |
+
agreed to in writing, Licensor provides the Work (and each
|
| 145 |
+
Contributor provides its Contributions) on an "AS IS" BASIS,
|
| 146 |
+
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
|
| 147 |
+
implied, including, without limitation, any warranties or conditions
|
| 148 |
+
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
|
| 149 |
+
PARTICULAR PURPOSE. You are solely responsible for determining the
|
| 150 |
+
appropriateness of using or redistributing the Work and assume any
|
| 151 |
+
risks associated with Your exercise of permissions under this License.
|
| 152 |
+
|
| 153 |
+
8. Limitation of Liability. In no event and under no legal theory,
|
| 154 |
+
whether in tort (including negligence), contract, or otherwise,
|
| 155 |
+
unless required by applicable law (such as deliberate and grossly
|
| 156 |
+
negligent acts) or agreed to in writing, shall any Contributor be
|
| 157 |
+
liable to You for damages, including any direct, indirect, special,
|
| 158 |
+
incidental, or consequential damages of any character arising as a
|
| 159 |
+
result of this License or out of the use or inability to use the
|
| 160 |
+
Work (including but not limited to damages for loss of goodwill,
|
| 161 |
+
work stoppage, computer failure or malfunction, or any and all
|
| 162 |
+
other commercial damages or losses), even if such Contributor
|
| 163 |
+
has been advised of the possibility of such damages.
|
| 164 |
+
|
| 165 |
+
9. Accepting Warranty or Additional Liability. While redistributing
|
| 166 |
+
the Work or Derivative Works thereof, You may choose to offer,
|
| 167 |
+
and charge a fee for, acceptance of support, warranty, indemnity,
|
| 168 |
+
or other liability obligations and/or rights consistent with this
|
| 169 |
+
License. However, in accepting such obligations, You may act only
|
| 170 |
+
on Your own behalf and on Your sole responsibility, not on behalf
|
| 171 |
+
of any other Contributor, and only if You agree to indemnify,
|
| 172 |
+
defend, and hold each Contributor harmless for any liability
|
| 173 |
+
incurred by, or claims asserted against, such Contributor by reason
|
| 174 |
+
of your accepting any such warranty or additional liability.
|
| 175 |
+
|
| 176 |
+
END OF TERMS AND CONDITIONS
|
| 177 |
+
|
| 178 |
+
APPENDIX: How to apply the Apache License to your work.
|
| 179 |
+
|
| 180 |
+
To apply the Apache License to your work, attach the following
|
| 181 |
+
boilerplate notice, with the fields enclosed by brackets "[]"
|
| 182 |
+
replaced with your own identifying information. (Don't include
|
| 183 |
+
the brackets!) The text should be enclosed in the appropriate
|
| 184 |
+
comment syntax for the file format. We also recommend that a
|
| 185 |
+
file or class name and description of purpose be included on the
|
| 186 |
+
same "printed page" as the copyright notice for easier
|
| 187 |
+
identification within third-party archives.
|
| 188 |
+
|
| 189 |
+
Copyright [yyyy] [name of copyright owner]
|
| 190 |
+
|
| 191 |
+
Licensed under the Apache License, Version 2.0 (the "License");
|
| 192 |
+
you may not use this file except in compliance with the License.
|
| 193 |
+
You may obtain a copy of the License at
|
| 194 |
+
|
| 195 |
+
http://www.apache.org/licenses/LICENSE-2.0
|
| 196 |
+
|
| 197 |
+
Unless required by applicable law or agreed to in writing, software
|
| 198 |
+
distributed under the License is distributed on an "AS IS" BASIS,
|
| 199 |
+
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
| 200 |
+
See the License for the specific language governing permissions and
|
| 201 |
+
limitations under the License.
|
README.md
CHANGED
|
@@ -1,12 +1,214 @@
|
|
| 1 |
-
|
| 2 |
-
|
| 3 |
-
|
| 4 |
-
|
| 5 |
-
|
| 6 |
-
|
| 7 |
-
|
| 8 |
-
|
| 9 |
-
|
| 10 |
-
|
| 11 |
-
|
| 12 |
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
<p align="center">
|
| 2 |
+
<img src="assets/logo2.png" height=65>
|
| 3 |
+
</p>
|
| 4 |
+
|
| 5 |
+
<div align="center">
|
| 6 |
+
|
| 7 |
+
⏬[**Download Models**](#-download-models) **|** 💻[**How to Test**](#-how-to-test)
|
| 8 |
+
|
| 9 |
+
</div>
|
| 10 |
+
|
| 11 |
+
Official implementation of T2I-Adapter: Learning Adapters to Dig out More Controllable Ability for Text-to-Image Diffusion Models.
|
| 12 |
+
|
| 13 |
+
#### [Paper](https://arxiv.org/abs/2302.08453)
|
| 14 |
+
|
| 15 |
+
<p align="center">
|
| 16 |
+
<img src="assets/overview1.png" height=250>
|
| 17 |
+
</p>
|
| 18 |
+
|
| 19 |
+
We propose T2I-Adapter, a **simple and small (~70M parameters, ~300M storage space)** network that can provide extra guidance to pre-trained text-to-image models while **freezing** the original large text-to-image models.
|
| 20 |
+
|
| 21 |
+
T2I-Adapter aligns internal knowledge in T2I models with external control signals.
|
| 22 |
+
We can train various adapters according to different conditions, and achieve rich control and editing effects.
|
| 23 |
+
|
| 24 |
+
<p align="center">
|
| 25 |
+
<img src="assets/teaser.png" height=500>
|
| 26 |
+
</p>
|
| 27 |
+
|
| 28 |
+
### ⏬ Download Models
|
| 29 |
+
|
| 30 |
+
Put the downloaded models in the `T2I-Adapter/models` folder.
|
| 31 |
+
|
| 32 |
+
1. The **T2I-Adapters** can be download from <https://huggingface.co/TencentARC/T2I-Adapter>.
|
| 33 |
+
2. The pretrained **Stable Diffusion v1.4** models can be download from <https://huggingface.co/CompVis/stable-diffusion-v-1-4-original/tree/main>. You need to download the `sd-v1-4.ckpt
|
| 34 |
+
` file.
|
| 35 |
+
3. [Optional] If you want to use **Anything v4.0** models, you can download the pretrained models from <https://huggingface.co/andite/anything-v4.0/tree/main>. You need to download the `anything-v4.0-pruned.ckpt` file.
|
| 36 |
+
4. The pretrained **clip-vit-large-patch14** folder can be download from <https://huggingface.co/openai/clip-vit-large-patch14/tree/main>. Remember to download the whole folder!
|
| 37 |
+
5. The pretrained keypose detection models include FasterRCNN (human detection) from <https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth> and HRNet (pose detection) from <https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth>.
|
| 38 |
+
|
| 39 |
+
After downloading, the folder structure should be like this:
|
| 40 |
+
|
| 41 |
+
<p align="center">
|
| 42 |
+
<img src="assets/downloaded_models.png" height=100>
|
| 43 |
+
</p>
|
| 44 |
+
|
| 45 |
+
### 🔧 Dependencies and Installation
|
| 46 |
+
|
| 47 |
+
- Python >= 3.6 (Recommend to use [Anaconda](https://www.anaconda.com/download/#linux) or [Miniconda](https://docs.conda.io/en/latest/miniconda.html))
|
| 48 |
+
- [PyTorch >= 1.4](https://pytorch.org/)
|
| 49 |
+
```bash
|
| 50 |
+
pip install -r requirements.txt
|
| 51 |
+
```
|
| 52 |
+
- If you want to use the full function of keypose-guided generation, you need to install MMPose. For details please refer to <https://github.com/open-mmlab/mmpose>.
|
| 53 |
+
|
| 54 |
+
### 💻 How to Test
|
| 55 |
+
|
| 56 |
+
- The results are in the `experiments` folder.
|
| 57 |
+
- If you want to use the `Anything v4.0`, please add `--ckpt models/anything-v4.0-pruned.ckpt` in the following commands.
|
| 58 |
+
|
| 59 |
+
#### **For Simple Experience**
|
| 60 |
+
|
| 61 |
+
> python app.py
|
| 62 |
+
|
| 63 |
+
#### **Sketch Adapter**
|
| 64 |
+
|
| 65 |
+
- Sketch to Image Generation
|
| 66 |
+
|
| 67 |
+
> python test_sketch.py --plms --auto_resume --prompt "A car with flying wings" --path_cond examples/sketch/car.png --ckpt models/sd-v1-4.ckpt --type_in sketch
|
| 68 |
+
|
| 69 |
+
- Image to Image Generation
|
| 70 |
+
|
| 71 |
+
> python test_sketch.py --plms --auto_resume --prompt "A beautiful girl" --path_cond examples/anything_sketch/human.png --ckpt models/sd-v1-4.ckpt --type_in image
|
| 72 |
+
|
| 73 |
+
- Generation with **Anything** setting
|
| 74 |
+
|
| 75 |
+
> python test_sketch.py --plms --auto_resume --prompt "A beautiful girl" --path_cond examples/anything_sketch/human.png --ckpt models/anything-v4.0-pruned.ckpt --type_in image
|
| 76 |
+
|
| 77 |
+
##### Gradio Demo
|
| 78 |
+
<p align="center">
|
| 79 |
+
<img src="assets/gradio_sketch.png">
|
| 80 |
+
</p>
|
| 81 |
+
You can use gradio to experience all these three functions at once. CPU is also supported by setting device to 'cpu'.
|
| 82 |
+
|
| 83 |
+
```bash
|
| 84 |
+
python gradio_sketch.py
|
| 85 |
+
```
|
| 86 |
+
|
| 87 |
+
#### **Keypose Adapter**
|
| 88 |
+
|
| 89 |
+
- Keypose to Image Generation
|
| 90 |
+
|
| 91 |
+
> python test_keypose.py --plms --auto_resume --prompt "A beautiful girl" --path_cond examples/keypose/iron.png --type_in pose
|
| 92 |
+
|
| 93 |
+
- Image to Image Generation
|
| 94 |
+
|
| 95 |
+
> python test_keypose.py --plms --auto_resume --prompt "A beautiful girl" --path_cond examples/sketch/human.png --type_in image
|
| 96 |
+
|
| 97 |
+
- Generation with **Anything** setting
|
| 98 |
+
|
| 99 |
+
> python test_keypose.py --plms --auto_resume --prompt "A beautiful girl" --path_cond examples/sketch/human.png --ckpt models/anything-v4.0-pruned.ckpt --type_in image
|
| 100 |
+
|
| 101 |
+
##### Gradio Demo
|
| 102 |
+
<p align="center">
|
| 103 |
+
<img src="assets/gradio_keypose.png">
|
| 104 |
+
</p>
|
| 105 |
+
You can use gradio to experience all these three functions at once. CPU is also supported by setting device to 'cpu'.
|
| 106 |
+
|
| 107 |
+
```bash
|
| 108 |
+
python gradio_keypose.py
|
| 109 |
+
```
|
| 110 |
+
|
| 111 |
+
#### **Segmentation Adapter**
|
| 112 |
+
|
| 113 |
+
> python test_seg.py --plms --auto_resume --prompt "A black Honda motorcycle parked in front of a garage" --path_cond examples/seg/motor.png
|
| 114 |
+
|
| 115 |
+
#### **Two adapters: Segmentation and Sketch Adapters**
|
| 116 |
+
|
| 117 |
+
> python test_seg_sketch.py --plms --auto_resume --prompt "An all white kitchen with an electric stovetop" --path_cond examples/seg_sketch/mask.png --path_cond2 examples/seg_sketch/edge.png
|
| 118 |
+
|
| 119 |
+
#### **Local editing with adapters**
|
| 120 |
+
|
| 121 |
+
> python test_sketch_edit.py --plms --auto_resume --prompt "A white cat" --path_cond examples/edit_cat/edge_2.png --path_x0 examples/edit_cat/im.png --path_mask examples/edit_cat/mask.png
|
| 122 |
+
|
| 123 |
+
## Stable Diffusion + T2I-Adapters (only ~70M parameters, ~300M storage space)
|
| 124 |
+
|
| 125 |
+
The following is the detailed structure of a **Stable Diffusion** model with the **T2I-Adapter**.
|
| 126 |
+
<p align="center">
|
| 127 |
+
<img src="assets/overview2.png" height=300>
|
| 128 |
+
</p>
|
| 129 |
+
|
| 130 |
+
<!-- ## Web Demo
|
| 131 |
+
|
| 132 |
+
* All the usage of three T2I-Adapters (i.e, sketch, keypose and segmentation) are integrated into [Huggingface Spaces]() 🤗 using [Gradio](). Have fun with the Web Demo. -->
|
| 133 |
+
|
| 134 |
+
## 🚀 Interesting Applications
|
| 135 |
+
|
| 136 |
+
### Stable Diffusion results guided with the sketch T2I-Adapter
|
| 137 |
+
|
| 138 |
+
The corresponding edge maps are predicted by PiDiNet. The sketch T2I-Adapter can well generalize to other similar sketch types, for example, sketches from the Internet and user scribbles.
|
| 139 |
+
|
| 140 |
+
<p align="center">
|
| 141 |
+
<img src="assets/sketch_base.png" height=800>
|
| 142 |
+
</p>
|
| 143 |
+
|
| 144 |
+
### Stable Diffusion results guided with the keypose T2I-Adapter
|
| 145 |
+
|
| 146 |
+
The keypose results predicted by the [MMPose](https://github.com/open-mmlab/mmpose).
|
| 147 |
+
With the keypose guidance, the keypose T2I-Adapter can also help to generate animals with the same keypose, for example, pandas and tigers.
|
| 148 |
+
|
| 149 |
+
<p align="center">
|
| 150 |
+
<img src="assets/keypose_base.png" height=600>
|
| 151 |
+
</p>
|
| 152 |
+
|
| 153 |
+
### T2I-Adapter with Anything-v4.0
|
| 154 |
+
|
| 155 |
+
Once the T2I-Adapter is trained, it can act as a **plug-and-play module** and can be seamlessly integrated into the finetuned diffusion models **without re-training**, for example, Anything-4.0.
|
| 156 |
+
|
| 157 |
+
#### ✨ Anything results with the plug-and-play sketch T2I-Adapter (no extra training)
|
| 158 |
+
|
| 159 |
+
<p align="center">
|
| 160 |
+
<img src="assets/sketch_anything.png" height=600>
|
| 161 |
+
</p>
|
| 162 |
+
|
| 163 |
+
#### Anything results with the plug-and-play keypose T2I-Adapter (no extra training)
|
| 164 |
+
|
| 165 |
+
<p align="center">
|
| 166 |
+
<img src="assets/keypose_anything.png" height=600>
|
| 167 |
+
</p>
|
| 168 |
+
|
| 169 |
+
### Local editing with the sketch adapter
|
| 170 |
+
|
| 171 |
+
When combined with the inpaiting mode of Stable Diffusion, we can realize local editing with user specific guidance.
|
| 172 |
+
|
| 173 |
+
#### ✨ Change the head direction of the cat
|
| 174 |
+
|
| 175 |
+
<p align="center">
|
| 176 |
+
<img src="assets/local_editing_cat.png" height=300>
|
| 177 |
+
</p>
|
| 178 |
+
|
| 179 |
+
#### ✨ Add rabbit ears on the head of the Iron Man.
|
| 180 |
+
|
| 181 |
+
<p align="center">
|
| 182 |
+
<img src="assets/local_editing_ironman.png" height=400>
|
| 183 |
+
</p>
|
| 184 |
+
|
| 185 |
+
### Combine different concepts with adapter
|
| 186 |
+
|
| 187 |
+
Adapter can be used to enhance the SD ability to combine different concepts.
|
| 188 |
+
|
| 189 |
+
#### ✨ A car with flying wings. / A doll in the shape of letter ‘A’.
|
| 190 |
+
|
| 191 |
+
<p align="center">
|
| 192 |
+
<img src="assets/enhance_SD2.png" height=600>
|
| 193 |
+
</p>
|
| 194 |
+
|
| 195 |
+
### Sequential editing with the sketch adapter
|
| 196 |
+
|
| 197 |
+
We can realize the sequential editing with the adapter guidance.
|
| 198 |
+
|
| 199 |
+
<p align="center">
|
| 200 |
+
<img src="assets/sequential_edit.png">
|
| 201 |
+
</p>
|
| 202 |
+
|
| 203 |
+
### Composable Guidance with multiple adapters
|
| 204 |
+
|
| 205 |
+
Stable Diffusion results guided with the segmentation and sketch adapters together.
|
| 206 |
+
|
| 207 |
+
<p align="center">
|
| 208 |
+
<img src="assets/multiple_adapters.png">
|
| 209 |
+
</p>
|
| 210 |
+
|
| 211 |
+
|
| 212 |
+

|
| 213 |
+
|
| 214 |
+
Logo materials: [adapter](https://www.flaticon.com/free-icon/adapter_4777242), [lightbulb](https://www.flaticon.com/free-icon/lightbulb_3176369)
|
app.py
ADDED
|
@@ -0,0 +1,59 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from demo.model import Model_all
|
| 2 |
+
import gradio as gr
|
| 3 |
+
from demo.demos import create_demo_keypose, create_demo_sketch, create_demo_draw
|
| 4 |
+
import torch
|
| 5 |
+
import subprocess
|
| 6 |
+
import os
|
| 7 |
+
import shlex
|
| 8 |
+
from huggingface_hub import hf_hub_url
|
| 9 |
+
|
| 10 |
+
urls = {
|
| 11 |
+
'TencentARC/T2I-Adapter':['models/t2iadapter_keypose_sd14v1.pth', 'models/t2iadapter_seg_sd14v1.pth', 'models/t2iadapter_sketch_sd14v1.pth'],
|
| 12 |
+
'CompVis/stable-diffusion-v-1-4-original':['sd-v1-4.ckpt'],
|
| 13 |
+
'andite/anything-v4.0':['anything-v4.0-pruned.ckpt'],
|
| 14 |
+
}
|
| 15 |
+
urls_mmpose = [
|
| 16 |
+
'https://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth',
|
| 17 |
+
'https://download.openmmlab.com/mmpose/top_down/hrnet/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth',
|
| 18 |
+
]
|
| 19 |
+
if os.path.exists('models') == False:
|
| 20 |
+
os.mkdir('models')
|
| 21 |
+
for repo in urls:
|
| 22 |
+
files = urls[repo]
|
| 23 |
+
for file in files:
|
| 24 |
+
url = hf_hub_url(repo, file)
|
| 25 |
+
name_ckp = url.split('/')[-1]
|
| 26 |
+
save_path = os.path.join('models',name_ckp)
|
| 27 |
+
if os.path.exists(save_path) == False:
|
| 28 |
+
subprocess.run(shlex.split(f'wget {url} -O {save_path}'))
|
| 29 |
+
|
| 30 |
+
for url in urls_mmpose:
|
| 31 |
+
name_ckp = url.split('/')[-1]
|
| 32 |
+
save_path = os.path.join('models',name_ckp)
|
| 33 |
+
if os.path.exists(save_path) == False:
|
| 34 |
+
subprocess.run(shlex.split(f'wget {url} -O {save_path}'))
|
| 35 |
+
|
| 36 |
+
device = 'cuda' if torch.cuda.is_available() else 'cpu'
|
| 37 |
+
model = Model_all(device)
|
| 38 |
+
|
| 39 |
+
DESCRIPTION = '''# T2I-Adapter (Sketch & Keypose)
|
| 40 |
+
[Paper](https://arxiv.org/abs/2302.08453) [GitHub](https://github.com/TencentARC/T2I-Adapter)
|
| 41 |
+
|
| 42 |
+
This gradio demo is for a simple experience of T2I-Adapter:
|
| 43 |
+
- Keypose/Sketch to Image Generation
|
| 44 |
+
- Image to Image Generation
|
| 45 |
+
- Support the base model of Stable Diffusion v1.4 and Anything 4.0
|
| 46 |
+
'''
|
| 47 |
+
|
| 48 |
+
with gr.Blocks(css='style.css') as demo:
|
| 49 |
+
gr.Markdown(DESCRIPTION)
|
| 50 |
+
|
| 51 |
+
with gr.Tabs():
|
| 52 |
+
with gr.TabItem('Keypose'):
|
| 53 |
+
create_demo_keypose(model.process_keypose)
|
| 54 |
+
with gr.TabItem('Sketch'):
|
| 55 |
+
create_demo_sketch(model.process_sketch)
|
| 56 |
+
with gr.TabItem('Draw'):
|
| 57 |
+
create_demo_draw(model.process_draw)
|
| 58 |
+
|
| 59 |
+
demo.queue(api_open=False).launch(server_name='0.0.0.0')
|
configs/stable-diffusion/app.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: app
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config:
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
device: 'cuda'
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/test_keypose.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: test_keypose
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/test_mask.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: test_mask
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/test_mask_sketch.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: test_mask_sketch
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/test_sketch.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: test_sketch
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/test_sketch_edit.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: test_sketch_edit
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/train_keypose.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: train_keypose
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/train_mask.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: train_mask
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
configs/stable-diffusion/train_sketch.yaml
ADDED
|
@@ -0,0 +1,87 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: train_sketch
|
| 2 |
+
model:
|
| 3 |
+
base_learning_rate: 1.0e-04
|
| 4 |
+
target: ldm.models.diffusion.ddpm.LatentDiffusion
|
| 5 |
+
params:
|
| 6 |
+
linear_start: 0.00085
|
| 7 |
+
linear_end: 0.0120
|
| 8 |
+
num_timesteps_cond: 1
|
| 9 |
+
log_every_t: 200
|
| 10 |
+
timesteps: 1000
|
| 11 |
+
first_stage_key: "jpg"
|
| 12 |
+
cond_stage_key: "txt"
|
| 13 |
+
image_size: 64
|
| 14 |
+
channels: 4
|
| 15 |
+
cond_stage_trainable: false # Note: different from the one we trained before
|
| 16 |
+
conditioning_key: crossattn
|
| 17 |
+
monitor: val/loss_simple_ema
|
| 18 |
+
scale_factor: 0.18215
|
| 19 |
+
use_ema: False
|
| 20 |
+
|
| 21 |
+
scheduler_config: # 10000 warmup steps
|
| 22 |
+
target: ldm.lr_scheduler.LambdaLinearScheduler
|
| 23 |
+
params:
|
| 24 |
+
warm_up_steps: [ 10000 ]
|
| 25 |
+
cycle_lengths: [ 10000000000000 ] # incredibly large number to prevent corner cases
|
| 26 |
+
f_start: [ 1.e-6 ]
|
| 27 |
+
f_max: [ 1. ]
|
| 28 |
+
f_min: [ 1. ]
|
| 29 |
+
|
| 30 |
+
unet_config:
|
| 31 |
+
target: ldm.modules.diffusionmodules.openaimodel.UNetModel
|
| 32 |
+
params:
|
| 33 |
+
image_size: 32 # unused
|
| 34 |
+
in_channels: 4
|
| 35 |
+
out_channels: 4
|
| 36 |
+
model_channels: 320
|
| 37 |
+
attention_resolutions: [ 4, 2, 1 ]
|
| 38 |
+
num_res_blocks: 2
|
| 39 |
+
channel_mult: [ 1, 2, 4, 4 ]
|
| 40 |
+
num_heads: 8
|
| 41 |
+
use_spatial_transformer: True
|
| 42 |
+
transformer_depth: 1
|
| 43 |
+
context_dim: 768
|
| 44 |
+
use_checkpoint: True
|
| 45 |
+
legacy: False
|
| 46 |
+
|
| 47 |
+
first_stage_config:
|
| 48 |
+
target: ldm.models.autoencoder.AutoencoderKL
|
| 49 |
+
params:
|
| 50 |
+
embed_dim: 4
|
| 51 |
+
monitor: val/rec_loss
|
| 52 |
+
ddconfig:
|
| 53 |
+
double_z: true
|
| 54 |
+
z_channels: 4
|
| 55 |
+
resolution: 256
|
| 56 |
+
in_channels: 3
|
| 57 |
+
out_ch: 3
|
| 58 |
+
ch: 128
|
| 59 |
+
ch_mult:
|
| 60 |
+
- 1
|
| 61 |
+
- 2
|
| 62 |
+
- 4
|
| 63 |
+
- 4
|
| 64 |
+
num_res_blocks: 2
|
| 65 |
+
attn_resolutions: []
|
| 66 |
+
dropout: 0.0
|
| 67 |
+
lossconfig:
|
| 68 |
+
target: torch.nn.Identity
|
| 69 |
+
|
| 70 |
+
cond_stage_config: #__is_unconditional__
|
| 71 |
+
target: ldm.modules.encoders.modules.FrozenCLIPEmbedder
|
| 72 |
+
params:
|
| 73 |
+
version: models/clip-vit-large-patch14
|
| 74 |
+
|
| 75 |
+
logger:
|
| 76 |
+
print_freq: 100
|
| 77 |
+
save_checkpoint_freq: !!float 1e4
|
| 78 |
+
use_tb_logger: true
|
| 79 |
+
wandb:
|
| 80 |
+
project: ~
|
| 81 |
+
resume_id: ~
|
| 82 |
+
dist_params:
|
| 83 |
+
backend: nccl
|
| 84 |
+
port: 29500
|
| 85 |
+
training:
|
| 86 |
+
lr: !!float 1e-5
|
| 87 |
+
save_freq: 1e4
|
dataset_coco.py
ADDED
|
@@ -0,0 +1,138 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import torch
|
| 2 |
+
import json
|
| 3 |
+
import cv2
|
| 4 |
+
import torch
|
| 5 |
+
import os
|
| 6 |
+
from basicsr.utils import img2tensor, tensor2img
|
| 7 |
+
import random
|
| 8 |
+
|
| 9 |
+
class dataset_coco():
|
| 10 |
+
def __init__(self, path_json, root_path, image_size, mode='train'):
|
| 11 |
+
super(dataset_coco, self).__init__()
|
| 12 |
+
with open(path_json, 'r', encoding='utf-8') as fp:
|
| 13 |
+
data = json.load(fp)
|
| 14 |
+
data = data['images']
|
| 15 |
+
self.paths = []
|
| 16 |
+
self.root_path = root_path
|
| 17 |
+
for file in data:
|
| 18 |
+
input_path = file['filepath']
|
| 19 |
+
if mode == 'train':
|
| 20 |
+
if 'val' not in input_path:
|
| 21 |
+
self.paths.append(file)
|
| 22 |
+
else:
|
| 23 |
+
if 'val' in input_path:
|
| 24 |
+
self.paths.append(file)
|
| 25 |
+
|
| 26 |
+
def __getitem__(self, idx):
|
| 27 |
+
file = self.paths[idx]
|
| 28 |
+
input_path = file['filepath']
|
| 29 |
+
input_name = file['filename']
|
| 30 |
+
path = os.path.join(self.root_path, input_path, input_name)
|
| 31 |
+
im = cv2.imread(path)
|
| 32 |
+
im = cv2.resize(im, (512,512))
|
| 33 |
+
im = img2tensor(im, bgr2rgb=True, float32=True)/255.
|
| 34 |
+
sentences = file['sentences']
|
| 35 |
+
sentence = sentences[int(random.random()*len(sentences))]['raw'].strip('.')
|
| 36 |
+
return {'im':im, 'sentence':sentence}
|
| 37 |
+
|
| 38 |
+
def __len__(self):
|
| 39 |
+
return len(self.paths)
|
| 40 |
+
|
| 41 |
+
|
| 42 |
+
class dataset_coco_mask():
|
| 43 |
+
def __init__(self, path_json, root_path_im, root_path_mask, image_size):
|
| 44 |
+
super(dataset_coco_mask, self).__init__()
|
| 45 |
+
with open(path_json, 'r', encoding='utf-8') as fp:
|
| 46 |
+
data = json.load(fp)
|
| 47 |
+
data = data['annotations']
|
| 48 |
+
self.files = []
|
| 49 |
+
self.root_path_im = root_path_im
|
| 50 |
+
self.root_path_mask = root_path_mask
|
| 51 |
+
for file in data:
|
| 52 |
+
name = "%012d.png"%file['image_id']
|
| 53 |
+
self.files.append({'name':name, 'sentence':file['caption']})
|
| 54 |
+
|
| 55 |
+
def __getitem__(self, idx):
|
| 56 |
+
file = self.files[idx]
|
| 57 |
+
name = file['name']
|
| 58 |
+
# print(os.path.join(self.root_path_im, name))
|
| 59 |
+
im = cv2.imread(os.path.join(self.root_path_im, name.replace('.png','.jpg')))
|
| 60 |
+
im = cv2.resize(im, (512,512))
|
| 61 |
+
im = img2tensor(im, bgr2rgb=True, float32=True)/255.
|
| 62 |
+
|
| 63 |
+
mask = cv2.imread(os.path.join(self.root_path_mask, name))#[:,:,0]
|
| 64 |
+
mask = cv2.resize(mask, (512,512))
|
| 65 |
+
mask = img2tensor(mask, bgr2rgb=True, float32=True)[0].unsqueeze(0)#/255.
|
| 66 |
+
|
| 67 |
+
sentence = file['sentence']
|
| 68 |
+
return {'im':im, 'mask':mask, 'sentence':sentence}
|
| 69 |
+
|
| 70 |
+
def __len__(self):
|
| 71 |
+
return len(self.files)
|
| 72 |
+
|
| 73 |
+
|
| 74 |
+
class dataset_coco_mask_color():
|
| 75 |
+
def __init__(self, path_json, root_path_im, root_path_mask, image_size):
|
| 76 |
+
super(dataset_coco_mask_color, self).__init__()
|
| 77 |
+
with open(path_json, 'r', encoding='utf-8') as fp:
|
| 78 |
+
data = json.load(fp)
|
| 79 |
+
data = data['annotations']
|
| 80 |
+
self.files = []
|
| 81 |
+
self.root_path_im = root_path_im
|
| 82 |
+
self.root_path_mask = root_path_mask
|
| 83 |
+
for file in data:
|
| 84 |
+
name = "%012d.png"%file['image_id']
|
| 85 |
+
self.files.append({'name':name, 'sentence':file['caption']})
|
| 86 |
+
|
| 87 |
+
def __getitem__(self, idx):
|
| 88 |
+
file = self.files[idx]
|
| 89 |
+
name = file['name']
|
| 90 |
+
# print(os.path.join(self.root_path_im, name))
|
| 91 |
+
im = cv2.imread(os.path.join(self.root_path_im, name.replace('.png','.jpg')))
|
| 92 |
+
im = cv2.resize(im, (512,512))
|
| 93 |
+
im = img2tensor(im, bgr2rgb=True, float32=True)/255.
|
| 94 |
+
|
| 95 |
+
mask = cv2.imread(os.path.join(self.root_path_mask, name))#[:,:,0]
|
| 96 |
+
mask = cv2.resize(mask, (512,512))
|
| 97 |
+
mask = img2tensor(mask, bgr2rgb=True, float32=True)/255.#[0].unsqueeze(0)#/255.
|
| 98 |
+
|
| 99 |
+
sentence = file['sentence']
|
| 100 |
+
return {'im':im, 'mask':mask, 'sentence':sentence}
|
| 101 |
+
|
| 102 |
+
def __len__(self):
|
| 103 |
+
return len(self.files)
|
| 104 |
+
|
| 105 |
+
class dataset_coco_mask_color_sig():
|
| 106 |
+
def __init__(self, path_json, root_path_im, root_path_mask, image_size):
|
| 107 |
+
super(dataset_coco_mask_color_sig, self).__init__()
|
| 108 |
+
with open(path_json, 'r', encoding='utf-8') as fp:
|
| 109 |
+
data = json.load(fp)
|
| 110 |
+
data = data['annotations']
|
| 111 |
+
self.files = []
|
| 112 |
+
self.root_path_im = root_path_im
|
| 113 |
+
self.root_path_mask = root_path_mask
|
| 114 |
+
reg = {}
|
| 115 |
+
for file in data:
|
| 116 |
+
name = "%012d.png"%file['image_id']
|
| 117 |
+
if name in reg:
|
| 118 |
+
continue
|
| 119 |
+
self.files.append({'name':name, 'sentence':file['caption']})
|
| 120 |
+
reg[name] = name
|
| 121 |
+
|
| 122 |
+
def __getitem__(self, idx):
|
| 123 |
+
file = self.files[idx]
|
| 124 |
+
name = file['name']
|
| 125 |
+
# print(os.path.join(self.root_path_im, name))
|
| 126 |
+
im = cv2.imread(os.path.join(self.root_path_im, name.replace('.png','.jpg')))
|
| 127 |
+
im = cv2.resize(im, (512,512))
|
| 128 |
+
im = img2tensor(im, bgr2rgb=True, float32=True)/255.
|
| 129 |
+
|
| 130 |
+
mask = cv2.imread(os.path.join(self.root_path_mask, name))#[:,:,0]
|
| 131 |
+
mask = cv2.resize(mask, (512,512))
|
| 132 |
+
mask = img2tensor(mask, bgr2rgb=True, float32=True)/255.#[0].unsqueeze(0)#/255.
|
| 133 |
+
|
| 134 |
+
sentence = file['sentence']
|
| 135 |
+
return {'im':im, 'mask':mask, 'sentence':sentence, 'name': name}
|
| 136 |
+
|
| 137 |
+
def __len__(self):
|
| 138 |
+
return len(self.files)
|
demo/demos.py
ADDED
|
@@ -0,0 +1,82 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import gradio as gr
|
| 2 |
+
import numpy as np
|
| 3 |
+
|
| 4 |
+
def create_map():
|
| 5 |
+
return np.zeros(shape=(512, 1024), dtype=np.uint8)+255
|
| 6 |
+
|
| 7 |
+
|
| 8 |
+
def create_demo_keypose(process):
|
| 9 |
+
with gr.Blocks() as demo:
|
| 10 |
+
with gr.Row():
|
| 11 |
+
gr.Markdown('T2I-Adapter (Keypose)')
|
| 12 |
+
with gr.Row():
|
| 13 |
+
with gr.Column():
|
| 14 |
+
input_img = gr.Image(source='upload', type="numpy")
|
| 15 |
+
prompt = gr.Textbox(label="Prompt")
|
| 16 |
+
neg_prompt = gr.Textbox(label="Negative Prompt",
|
| 17 |
+
value='ugly, tiling, poorly drawn hands, poorly drawn feet, poorly drawn face, out of frame, extra limbs, disfigured, deformed, body out of frame, bad anatomy, watermark, signature, cut off, low contrast, underexposed, overexposed, bad art, beginner, amateur, distorted face')
|
| 18 |
+
pos_prompt = gr.Textbox(label="Positive Prompt",
|
| 19 |
+
value = 'crafted, elegant, meticulous, magnificent, maximum details, extremely hyper aesthetic, intricately detailed')
|
| 20 |
+
with gr.Row():
|
| 21 |
+
type_in = gr.inputs.Radio(['Keypose', 'Image'], type="value", default='Image', label='Input Types\n (You can input an image or a keypose map)')
|
| 22 |
+
fix_sample = gr.inputs.Radio(['True', 'False'], type="value", default='False', label='Fix Sampling\n (Fix the random seed to produce a fixed output)')
|
| 23 |
+
run_button = gr.Button(label="Run")
|
| 24 |
+
con_strength = gr.Slider(label="Controling Strength (The guidance strength of the keypose to the result)", minimum=0, maximum=1, value=1, step=0.1)
|
| 25 |
+
scale = gr.Slider(label="Guidance Scale (Classifier free guidance)", minimum=0.1, maximum=30.0, value=9, step=0.1)
|
| 26 |
+
base_model = gr.inputs.Radio(['sd-v1-4.ckpt', 'anything-v4.0-pruned.ckpt'], type="value", default='sd-v1-4.ckpt', label='The base model you want to use')
|
| 27 |
+
with gr.Column():
|
| 28 |
+
result = gr.Gallery(label='Output', show_label=False, elem_id="gallery").style(grid=2, height='auto')
|
| 29 |
+
ips = [input_img, type_in, prompt, neg_prompt, pos_prompt, fix_sample, scale, con_strength, base_model]
|
| 30 |
+
run_button.click(fn=process, inputs=ips, outputs=[result])
|
| 31 |
+
return demo
|
| 32 |
+
|
| 33 |
+
def create_demo_sketch(process):
|
| 34 |
+
with gr.Blocks() as demo:
|
| 35 |
+
with gr.Row():
|
| 36 |
+
gr.Markdown('T2I-Adapter (Sketch)')
|
| 37 |
+
with gr.Row():
|
| 38 |
+
with gr.Column():
|
| 39 |
+
input_img = gr.Image(source='upload', type="numpy")
|
| 40 |
+
prompt = gr.Textbox(label="Prompt")
|
| 41 |
+
neg_prompt = gr.Textbox(label="Negative Prompt",
|
| 42 |
+
value='ugly, tiling, poorly drawn hands, poorly drawn feet, poorly drawn face, out of frame, extra limbs, disfigured, deformed, body out of frame, bad anatomy, watermark, signature, cut off, low contrast, underexposed, overexposed, bad art, beginner, amateur, distorted face')
|
| 43 |
+
pos_prompt = gr.Textbox(label="Positive Prompt",
|
| 44 |
+
value = 'crafted, elegant, meticulous, magnificent, maximum details, extremely hyper aesthetic, intricately detailed')
|
| 45 |
+
with gr.Row():
|
| 46 |
+
type_in = gr.inputs.Radio(['Sketch', 'Image'], type="value", default='Image', label='Input Types\n (You can input an image or a sketch)')
|
| 47 |
+
color_back = gr.inputs.Radio(['White', 'Black'], type="value", default='Black', label='Color of the sketch background\n (Only work for sketch input)')
|
| 48 |
+
run_button = gr.Button(label="Run")
|
| 49 |
+
con_strength = gr.Slider(label="Controling Strength (The guidance strength of the sketch to the result)", minimum=0, maximum=1, value=0.4, step=0.1)
|
| 50 |
+
scale = gr.Slider(label="Guidance Scale (Classifier free guidance)", minimum=0.1, maximum=30.0, value=9, step=0.1)
|
| 51 |
+
fix_sample = gr.inputs.Radio(['True', 'False'], type="value", default='False', label='Fix Sampling\n (Fix the random seed)')
|
| 52 |
+
base_model = gr.inputs.Radio(['sd-v1-4.ckpt', 'anything-v4.0-pruned.ckpt'], type="value", default='sd-v1-4.ckpt', label='The base model you want to use')
|
| 53 |
+
with gr.Column():
|
| 54 |
+
result = gr.Gallery(label='Output', show_label=False, elem_id="gallery").style(grid=2, height='auto')
|
| 55 |
+
ips = [input_img, type_in, color_back, prompt, neg_prompt, pos_prompt, fix_sample, scale, con_strength, base_model]
|
| 56 |
+
run_button.click(fn=process, inputs=ips, outputs=[result])
|
| 57 |
+
return demo
|
| 58 |
+
|
| 59 |
+
def create_demo_draw(process):
|
| 60 |
+
with gr.Blocks() as demo:
|
| 61 |
+
with gr.Row():
|
| 62 |
+
gr.Markdown('T2I-Adapter (Hand-free drawing)')
|
| 63 |
+
with gr.Row():
|
| 64 |
+
with gr.Column():
|
| 65 |
+
create_button = gr.Button(label="Start", value='Hand-free drawing')
|
| 66 |
+
input_img = gr.Image(source='upload', type="numpy",tool='sketch')
|
| 67 |
+
create_button.click(fn=create_map, outputs=[input_img])
|
| 68 |
+
prompt = gr.Textbox(label="Prompt")
|
| 69 |
+
neg_prompt = gr.Textbox(label="Negative Prompt",
|
| 70 |
+
value='ugly, tiling, poorly drawn hands, poorly drawn feet, poorly drawn face, out of frame, extra limbs, disfigured, deformed, body out of frame, bad anatomy, watermark, signature, cut off, low contrast, underexposed, overexposed, bad art, beginner, amateur, distorted face')
|
| 71 |
+
pos_prompt = gr.Textbox(label="Positive Prompt",
|
| 72 |
+
value = 'crafted, elegant, meticulous, magnificent, maximum details, extremely hyper aesthetic, intricately detailed')
|
| 73 |
+
run_button = gr.Button(label="Run")
|
| 74 |
+
con_strength = gr.Slider(label="Controling Strength (The guidance strength of the sketch to the result)", minimum=0, maximum=1, value=0.4, step=0.1)
|
| 75 |
+
scale = gr.Slider(label="Guidance Scale (Classifier free guidance)", minimum=0.1, maximum=30.0, value=9, step=0.1)
|
| 76 |
+
fix_sample = gr.inputs.Radio(['True', 'False'], type="value", default='False', label='Fix Sampling\n (Fix the random seed)')
|
| 77 |
+
base_model = gr.inputs.Radio(['sd-v1-4.ckpt', 'anything-v4.0-pruned.ckpt'], type="value", default='sd-v1-4.ckpt', label='The base model you want to use')
|
| 78 |
+
with gr.Column():
|
| 79 |
+
result = gr.Gallery(label='Output', show_label=False, elem_id="gallery").style(grid=2, height='auto')
|
| 80 |
+
ips = [input_img, prompt, neg_prompt, pos_prompt, fix_sample, scale, con_strength, base_model]
|
| 81 |
+
run_button.click(fn=process, inputs=ips, outputs=[result])
|
| 82 |
+
return demo
|
demo/model.py
ADDED
|
@@ -0,0 +1,390 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import torch
|
| 2 |
+
from basicsr.utils import img2tensor, tensor2img
|
| 3 |
+
from pytorch_lightning import seed_everything
|
| 4 |
+
from ldm.models.diffusion.plms import PLMSSampler
|
| 5 |
+
from ldm.modules.encoders.adapter import Adapter
|
| 6 |
+
from ldm.util import instantiate_from_config
|
| 7 |
+
from model_edge import pidinet
|
| 8 |
+
import gradio as gr
|
| 9 |
+
from omegaconf import OmegaConf
|
| 10 |
+
import mmcv
|
| 11 |
+
from mmdet.apis import inference_detector, init_detector
|
| 12 |
+
from mmpose.apis import (inference_top_down_pose_model, init_pose_model, process_mmdet_results, vis_pose_result)
|
| 13 |
+
import os
|
| 14 |
+
import cv2
|
| 15 |
+
import numpy as np
|
| 16 |
+
|
| 17 |
+
|
| 18 |
+
def imshow_keypoints(img,
|
| 19 |
+
pose_result,
|
| 20 |
+
skeleton=None,
|
| 21 |
+
kpt_score_thr=0.1,
|
| 22 |
+
pose_kpt_color=None,
|
| 23 |
+
pose_link_color=None,
|
| 24 |
+
radius=4,
|
| 25 |
+
thickness=1):
|
| 26 |
+
"""Draw keypoints and links on an image.
|
| 27 |
+
|
| 28 |
+
Args:
|
| 29 |
+
img (ndarry): The image to draw poses on.
|
| 30 |
+
pose_result (list[kpts]): The poses to draw. Each element kpts is
|
| 31 |
+
a set of K keypoints as an Kx3 numpy.ndarray, where each
|
| 32 |
+
keypoint is represented as x, y, score.
|
| 33 |
+
kpt_score_thr (float, optional): Minimum score of keypoints
|
| 34 |
+
to be shown. Default: 0.3.
|
| 35 |
+
pose_kpt_color (np.array[Nx3]`): Color of N keypoints. If None,
|
| 36 |
+
the keypoint will not be drawn.
|
| 37 |
+
pose_link_color (np.array[Mx3]): Color of M links. If None, the
|
| 38 |
+
links will not be drawn.
|
| 39 |
+
thickness (int): Thickness of lines.
|
| 40 |
+
"""
|
| 41 |
+
|
| 42 |
+
img_h, img_w, _ = img.shape
|
| 43 |
+
img = np.zeros(img.shape)
|
| 44 |
+
|
| 45 |
+
for idx, kpts in enumerate(pose_result):
|
| 46 |
+
if idx > 1:
|
| 47 |
+
continue
|
| 48 |
+
kpts = kpts['keypoints']
|
| 49 |
+
# print(kpts)
|
| 50 |
+
kpts = np.array(kpts, copy=False)
|
| 51 |
+
|
| 52 |
+
# draw each point on image
|
| 53 |
+
if pose_kpt_color is not None:
|
| 54 |
+
assert len(pose_kpt_color) == len(kpts)
|
| 55 |
+
|
| 56 |
+
for kid, kpt in enumerate(kpts):
|
| 57 |
+
x_coord, y_coord, kpt_score = int(kpt[0]), int(kpt[1]), kpt[2]
|
| 58 |
+
|
| 59 |
+
if kpt_score < kpt_score_thr or pose_kpt_color[kid] is None:
|
| 60 |
+
# skip the point that should not be drawn
|
| 61 |
+
continue
|
| 62 |
+
|
| 63 |
+
color = tuple(int(c) for c in pose_kpt_color[kid])
|
| 64 |
+
cv2.circle(img, (int(x_coord), int(y_coord)), radius, color, -1)
|
| 65 |
+
|
| 66 |
+
# draw links
|
| 67 |
+
if skeleton is not None and pose_link_color is not None:
|
| 68 |
+
assert len(pose_link_color) == len(skeleton)
|
| 69 |
+
|
| 70 |
+
for sk_id, sk in enumerate(skeleton):
|
| 71 |
+
pos1 = (int(kpts[sk[0], 0]), int(kpts[sk[0], 1]))
|
| 72 |
+
pos2 = (int(kpts[sk[1], 0]), int(kpts[sk[1], 1]))
|
| 73 |
+
|
| 74 |
+
if (pos1[0] <= 0 or pos1[0] >= img_w or pos1[1] <= 0 or pos1[1] >= img_h or pos2[0] <= 0
|
| 75 |
+
or pos2[0] >= img_w or pos2[1] <= 0 or pos2[1] >= img_h or kpts[sk[0], 2] < kpt_score_thr
|
| 76 |
+
or kpts[sk[1], 2] < kpt_score_thr or pose_link_color[sk_id] is None):
|
| 77 |
+
# skip the link that should not be drawn
|
| 78 |
+
continue
|
| 79 |
+
color = tuple(int(c) for c in pose_link_color[sk_id])
|
| 80 |
+
cv2.line(img, pos1, pos2, color, thickness=thickness)
|
| 81 |
+
|
| 82 |
+
return img
|
| 83 |
+
|
| 84 |
+
def load_model_from_config(config, ckpt, verbose=False):
|
| 85 |
+
print(f"Loading model from {ckpt}")
|
| 86 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 87 |
+
if "global_step" in pl_sd:
|
| 88 |
+
print(f"Global Step: {pl_sd['global_step']}")
|
| 89 |
+
if "state_dict" in pl_sd:
|
| 90 |
+
sd = pl_sd["state_dict"]
|
| 91 |
+
else:
|
| 92 |
+
sd = pl_sd
|
| 93 |
+
model = instantiate_from_config(config.model)
|
| 94 |
+
_, _ = model.load_state_dict(sd, strict=False)
|
| 95 |
+
|
| 96 |
+
model.cuda()
|
| 97 |
+
model.eval()
|
| 98 |
+
return model
|
| 99 |
+
|
| 100 |
+
class Model_all:
|
| 101 |
+
def __init__(self, device='cpu'):
|
| 102 |
+
# common part
|
| 103 |
+
self.device = device
|
| 104 |
+
self.config = OmegaConf.load("configs/stable-diffusion/app.yaml")
|
| 105 |
+
self.config.model.params.cond_stage_config.params.device = device
|
| 106 |
+
self.base_model = load_model_from_config(self.config, "models/sd-v1-4.ckpt").to(device)
|
| 107 |
+
self.current_base_pose = 'sd-v1-4.ckpt'
|
| 108 |
+
self.current_base_sketch = 'sd-v1-4.ckpt'
|
| 109 |
+
self.sampler = PLMSSampler(self.base_model)
|
| 110 |
+
|
| 111 |
+
# sketch part
|
| 112 |
+
self.model_sketch = Adapter(channels=[320, 640, 1280, 1280][:4], nums_rb=2, ksize=1, sk=True, use_conv=False).to(device)
|
| 113 |
+
self.model_sketch.load_state_dict(torch.load("models/t2iadapter_sketch_sd14v1.pth", map_location=device))
|
| 114 |
+
self.model_edge = pidinet()
|
| 115 |
+
ckp = torch.load('models/table5_pidinet.pth', map_location='cpu')['state_dict']
|
| 116 |
+
self.model_edge.load_state_dict({k.replace('module.',''):v for k, v in ckp.items()})
|
| 117 |
+
self.model_edge.to(device)
|
| 118 |
+
|
| 119 |
+
# keypose part
|
| 120 |
+
self.model_pose = Adapter(cin=int(3*64), channels=[320, 640, 1280, 1280][:4], nums_rb=2, ksize=1, sk=True, use_conv=False).to(device)
|
| 121 |
+
self.model_pose.load_state_dict(torch.load("models/t2iadapter_keypose_sd14v1.pth", map_location=device))
|
| 122 |
+
## mmpose
|
| 123 |
+
det_config = 'models/faster_rcnn_r50_fpn_coco.py'
|
| 124 |
+
det_checkpoint = 'models/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth'
|
| 125 |
+
pose_config = 'models/hrnet_w48_coco_256x192.py'
|
| 126 |
+
pose_checkpoint = 'models/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth'
|
| 127 |
+
self.det_cat_id = 1
|
| 128 |
+
self.bbox_thr = 0.2
|
| 129 |
+
## detector
|
| 130 |
+
det_config_mmcv = mmcv.Config.fromfile(det_config)
|
| 131 |
+
self.det_model = init_detector(det_config_mmcv, det_checkpoint, device=device)
|
| 132 |
+
pose_config_mmcv = mmcv.Config.fromfile(pose_config)
|
| 133 |
+
self.pose_model = init_pose_model(pose_config_mmcv, pose_checkpoint, device=device)
|
| 134 |
+
## color
|
| 135 |
+
self.skeleton = [[15, 13], [13, 11], [16, 14], [14, 12], [11, 12], [5, 11], [6, 12], [5, 6], [5, 7], [6, 8], [7, 9], [8, 10],
|
| 136 |
+
[1, 2], [0, 1], [0, 2], [1, 3], [2, 4], [3, 5], [4, 6]]
|
| 137 |
+
self.pose_kpt_color = [[51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [0, 255, 0],
|
| 138 |
+
[255, 128, 0], [0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0],
|
| 139 |
+
[0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0]]
|
| 140 |
+
self.pose_link_color = [[0, 255, 0], [0, 255, 0], [255, 128, 0], [255, 128, 0],
|
| 141 |
+
[51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [0, 255, 0], [255, 128, 0],
|
| 142 |
+
[0, 255, 0], [255, 128, 0], [51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255],
|
| 143 |
+
[51, 153, 255], [51, 153, 255], [51, 153, 255]]
|
| 144 |
+
|
| 145 |
+
@torch.no_grad()
|
| 146 |
+
def process_sketch(self, input_img, type_in, color_back, prompt, neg_prompt, pos_prompt, fix_sample, scale, con_strength, base_model):
|
| 147 |
+
if self.current_base_sketch != base_model:
|
| 148 |
+
ckpt = os.path.join("models", base_model)
|
| 149 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 150 |
+
if "state_dict" in pl_sd:
|
| 151 |
+
sd = pl_sd["state_dict"]
|
| 152 |
+
else:
|
| 153 |
+
sd = pl_sd
|
| 154 |
+
self.base_model.load_state_dict(sd, strict=False)
|
| 155 |
+
self.current_base_sketch = base_model
|
| 156 |
+
# del sd
|
| 157 |
+
# del pl_sd
|
| 158 |
+
con_strength = int((1-con_strength)*50)
|
| 159 |
+
if fix_sample == 'True':
|
| 160 |
+
seed_everything(42)
|
| 161 |
+
im = cv2.resize(input_img,(512,512))
|
| 162 |
+
|
| 163 |
+
if type_in == 'Sketch':
|
| 164 |
+
if color_back == 'White':
|
| 165 |
+
im = 255-im
|
| 166 |
+
im_edge = im.copy()
|
| 167 |
+
im = img2tensor(im)[0].unsqueeze(0).unsqueeze(0)/255.
|
| 168 |
+
im = im>0.5
|
| 169 |
+
im = im.float()
|
| 170 |
+
elif type_in == 'Image':
|
| 171 |
+
im = img2tensor(im).unsqueeze(0)/255.
|
| 172 |
+
im = self.model_edge(im.to(self.device))[-1]
|
| 173 |
+
im = im>0.5
|
| 174 |
+
im = im.float()
|
| 175 |
+
im_edge = tensor2img(im)
|
| 176 |
+
|
| 177 |
+
# save gpu memory
|
| 178 |
+
self.base_model.model = self.base_model.model.cpu()
|
| 179 |
+
self.model_sketch = self.model_sketch.cuda()
|
| 180 |
+
self.base_model.first_stage_model = self.base_model.first_stage_model.cpu()
|
| 181 |
+
self.base_model.cond_stage_model = self.base_model.cond_stage_model.cuda()
|
| 182 |
+
|
| 183 |
+
# extract condition features
|
| 184 |
+
c = self.base_model.get_learned_conditioning([prompt+', '+pos_prompt])
|
| 185 |
+
nc = self.base_model.get_learned_conditioning([neg_prompt])
|
| 186 |
+
features_adapter = self.model_sketch(im.to(self.device))
|
| 187 |
+
shape = [4, 64, 64]
|
| 188 |
+
|
| 189 |
+
# save gpu memory
|
| 190 |
+
self.model_sketch = self.model_sketch.cpu()
|
| 191 |
+
self.base_model.cond_stage_model = self.base_model.cond_stage_model.cpu()
|
| 192 |
+
self.base_model.model = self.base_model.model.cuda()
|
| 193 |
+
|
| 194 |
+
# sampling
|
| 195 |
+
samples_ddim, _ = self.sampler.sample(S=50,
|
| 196 |
+
conditioning=c,
|
| 197 |
+
batch_size=1,
|
| 198 |
+
shape=shape,
|
| 199 |
+
verbose=False,
|
| 200 |
+
unconditional_guidance_scale=scale,
|
| 201 |
+
unconditional_conditioning=nc,
|
| 202 |
+
eta=0.0,
|
| 203 |
+
x_T=None,
|
| 204 |
+
features_adapter1=features_adapter,
|
| 205 |
+
mode = 'sketch',
|
| 206 |
+
con_strength = con_strength)
|
| 207 |
+
# save gpu memory
|
| 208 |
+
self.base_model.first_stage_model = self.base_model.first_stage_model.cuda()
|
| 209 |
+
|
| 210 |
+
x_samples_ddim = self.base_model.decode_first_stage(samples_ddim)
|
| 211 |
+
x_samples_ddim = torch.clamp((x_samples_ddim + 1.0) / 2.0, min=0.0, max=1.0)
|
| 212 |
+
x_samples_ddim = x_samples_ddim.to('cpu')
|
| 213 |
+
x_samples_ddim = x_samples_ddim.permute(0, 2, 3, 1).numpy()[0]
|
| 214 |
+
x_samples_ddim = 255.*x_samples_ddim
|
| 215 |
+
x_samples_ddim = x_samples_ddim.astype(np.uint8)
|
| 216 |
+
|
| 217 |
+
return [im_edge, x_samples_ddim]
|
| 218 |
+
|
| 219 |
+
@torch.no_grad()
|
| 220 |
+
def process_draw(self, input_img, prompt, neg_prompt, pos_prompt, fix_sample, scale, con_strength, base_model):
|
| 221 |
+
if self.current_base_sketch != base_model:
|
| 222 |
+
ckpt = os.path.join("models", base_model)
|
| 223 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 224 |
+
if "state_dict" in pl_sd:
|
| 225 |
+
sd = pl_sd["state_dict"]
|
| 226 |
+
else:
|
| 227 |
+
sd = pl_sd
|
| 228 |
+
self.base_model.load_state_dict(sd, strict=False) #load_model_from_config(config, os.path.join("models", base_model)).to(device)
|
| 229 |
+
self.current_base_sketch = base_model
|
| 230 |
+
con_strength = int((1-con_strength)*50)
|
| 231 |
+
if fix_sample == 'True':
|
| 232 |
+
seed_everything(42)
|
| 233 |
+
input_img = input_img['mask']
|
| 234 |
+
c = input_img[:, :, 0:3].astype(np.float32)
|
| 235 |
+
a = input_img[:, :, 3:4].astype(np.float32) / 255.0
|
| 236 |
+
im = c * a + 255.0 * (1.0 - a)
|
| 237 |
+
im = im.clip(0, 255).astype(np.uint8)
|
| 238 |
+
im = cv2.resize(im,(512,512))
|
| 239 |
+
|
| 240 |
+
# im = 255-im
|
| 241 |
+
im_edge = im.copy()
|
| 242 |
+
im = img2tensor(im)[0].unsqueeze(0).unsqueeze(0)/255.
|
| 243 |
+
im = im>0.5
|
| 244 |
+
im = im.float()
|
| 245 |
+
|
| 246 |
+
# save gpu memory
|
| 247 |
+
self.base_model.model = self.base_model.model.cpu()
|
| 248 |
+
self.model_sketch = self.model_sketch.cuda()
|
| 249 |
+
self.base_model.first_stage_model = self.base_model.first_stage_model.cpu()
|
| 250 |
+
self.base_model.cond_stage_model = self.base_model.cond_stage_model.cuda()
|
| 251 |
+
|
| 252 |
+
# extract condition features
|
| 253 |
+
c = self.base_model.get_learned_conditioning([prompt+', '+pos_prompt])
|
| 254 |
+
nc = self.base_model.get_learned_conditioning([neg_prompt])
|
| 255 |
+
features_adapter = self.model_sketch(im.to(self.device))
|
| 256 |
+
shape = [4, 64, 64]
|
| 257 |
+
|
| 258 |
+
# save gpu memory
|
| 259 |
+
self.model_sketch = self.model_sketch.cpu()
|
| 260 |
+
self.base_model.cond_stage_model = self.base_model.cond_stage_model.cpu()
|
| 261 |
+
self.base_model.model = self.base_model.model.cuda()
|
| 262 |
+
|
| 263 |
+
# sampling
|
| 264 |
+
samples_ddim, _ = self.sampler.sample(S=50,
|
| 265 |
+
conditioning=c,
|
| 266 |
+
batch_size=1,
|
| 267 |
+
shape=shape,
|
| 268 |
+
verbose=False,
|
| 269 |
+
unconditional_guidance_scale=scale,
|
| 270 |
+
unconditional_conditioning=nc,
|
| 271 |
+
eta=0.0,
|
| 272 |
+
x_T=None,
|
| 273 |
+
features_adapter1=features_adapter,
|
| 274 |
+
mode = 'sketch',
|
| 275 |
+
con_strength = con_strength)
|
| 276 |
+
|
| 277 |
+
# save gpu memory
|
| 278 |
+
self.base_model.first_stage_model = self.base_model.first_stage_model.cuda()
|
| 279 |
+
|
| 280 |
+
x_samples_ddim = self.base_model.decode_first_stage(samples_ddim)
|
| 281 |
+
x_samples_ddim = torch.clamp((x_samples_ddim + 1.0) / 2.0, min=0.0, max=1.0)
|
| 282 |
+
x_samples_ddim = x_samples_ddim.to('cpu')
|
| 283 |
+
x_samples_ddim = x_samples_ddim.permute(0, 2, 3, 1).numpy()[0]
|
| 284 |
+
x_samples_ddim = 255.*x_samples_ddim
|
| 285 |
+
x_samples_ddim = x_samples_ddim.astype(np.uint8)
|
| 286 |
+
|
| 287 |
+
return [im_edge, x_samples_ddim]
|
| 288 |
+
|
| 289 |
+
@torch.no_grad()
|
| 290 |
+
def process_keypose(self, input_img, type_in, prompt, neg_prompt, pos_prompt, fix_sample, scale, con_strength, base_model):
|
| 291 |
+
if self.current_base_pose != base_model:
|
| 292 |
+
ckpt = os.path.join("models", base_model)
|
| 293 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 294 |
+
if "state_dict" in pl_sd:
|
| 295 |
+
sd = pl_sd["state_dict"]
|
| 296 |
+
else:
|
| 297 |
+
sd = pl_sd
|
| 298 |
+
self.base_model.load_state_dict(sd, strict=False)
|
| 299 |
+
self.current_base_pose = base_model
|
| 300 |
+
con_strength = int((1-con_strength)*50)
|
| 301 |
+
if fix_sample == 'True':
|
| 302 |
+
seed_everything(42)
|
| 303 |
+
im = cv2.resize(input_img,(512,512))
|
| 304 |
+
|
| 305 |
+
if type_in == 'Keypose':
|
| 306 |
+
im_pose = im.copy()
|
| 307 |
+
im = img2tensor(im).unsqueeze(0)/255.
|
| 308 |
+
elif type_in == 'Image':
|
| 309 |
+
image = im.copy()
|
| 310 |
+
im = img2tensor(im).unsqueeze(0)/255.
|
| 311 |
+
mmdet_results = inference_detector(self.det_model, image)
|
| 312 |
+
# keep the person class bounding boxes.
|
| 313 |
+
person_results = process_mmdet_results(mmdet_results, self.det_cat_id)
|
| 314 |
+
|
| 315 |
+
# optional
|
| 316 |
+
return_heatmap = False
|
| 317 |
+
dataset = self.pose_model.cfg.data['test']['type']
|
| 318 |
+
|
| 319 |
+
# e.g. use ('backbone', ) to return backbone feature
|
| 320 |
+
output_layer_names = None
|
| 321 |
+
pose_results, _ = inference_top_down_pose_model(
|
| 322 |
+
self.pose_model,
|
| 323 |
+
image,
|
| 324 |
+
person_results,
|
| 325 |
+
bbox_thr=self.bbox_thr,
|
| 326 |
+
format='xyxy',
|
| 327 |
+
dataset=dataset,
|
| 328 |
+
dataset_info=None,
|
| 329 |
+
return_heatmap=return_heatmap,
|
| 330 |
+
outputs=output_layer_names)
|
| 331 |
+
|
| 332 |
+
# show the results
|
| 333 |
+
im_pose = imshow_keypoints(
|
| 334 |
+
image,
|
| 335 |
+
pose_results,
|
| 336 |
+
skeleton=self.skeleton,
|
| 337 |
+
pose_kpt_color=self.pose_kpt_color,
|
| 338 |
+
pose_link_color=self.pose_link_color,
|
| 339 |
+
radius=2,
|
| 340 |
+
thickness=2)
|
| 341 |
+
im_pose = cv2.resize(im_pose,(512,512))
|
| 342 |
+
|
| 343 |
+
# save gpu memory
|
| 344 |
+
self.base_model.model = self.base_model.model.cpu()
|
| 345 |
+
self.model_pose = self.model_pose.cuda()
|
| 346 |
+
self.base_model.first_stage_model = self.base_model.first_stage_model.cpu()
|
| 347 |
+
self.base_model.cond_stage_model = self.base_model.cond_stage_model.cuda()
|
| 348 |
+
|
| 349 |
+
# extract condition features
|
| 350 |
+
c = self.base_model.get_learned_conditioning([prompt+', '+pos_prompt])
|
| 351 |
+
nc = self.base_model.get_learned_conditioning([neg_prompt])
|
| 352 |
+
pose = img2tensor(im_pose, bgr2rgb=True, float32=True)/255.
|
| 353 |
+
pose = pose.unsqueeze(0)
|
| 354 |
+
features_adapter = self.model_pose(pose.to(self.device))
|
| 355 |
+
|
| 356 |
+
# save gpu memory
|
| 357 |
+
self.model_pose = self.model_pose.cpu()
|
| 358 |
+
self.base_model.cond_stage_model = self.base_model.cond_stage_model.cpu()
|
| 359 |
+
self.base_model.model = self.base_model.model.cuda()
|
| 360 |
+
|
| 361 |
+
shape = [4, 64, 64]
|
| 362 |
+
|
| 363 |
+
# sampling
|
| 364 |
+
samples_ddim, _ = self.sampler.sample(S=50,
|
| 365 |
+
conditioning=c,
|
| 366 |
+
batch_size=1,
|
| 367 |
+
shape=shape,
|
| 368 |
+
verbose=False,
|
| 369 |
+
unconditional_guidance_scale=scale,
|
| 370 |
+
unconditional_conditioning=nc,
|
| 371 |
+
eta=0.0,
|
| 372 |
+
x_T=None,
|
| 373 |
+
features_adapter1=features_adapter,
|
| 374 |
+
mode = 'sketch',
|
| 375 |
+
con_strength = con_strength)
|
| 376 |
+
|
| 377 |
+
# save gpu memory
|
| 378 |
+
self.base_model.first_stage_model = self.base_model.first_stage_model.cuda()
|
| 379 |
+
|
| 380 |
+
x_samples_ddim = self.base_model.decode_first_stage(samples_ddim)
|
| 381 |
+
x_samples_ddim = torch.clamp((x_samples_ddim + 1.0) / 2.0, min=0.0, max=1.0)
|
| 382 |
+
x_samples_ddim = x_samples_ddim.to('cpu')
|
| 383 |
+
x_samples_ddim = x_samples_ddim.permute(0, 2, 3, 1).numpy()[0]
|
| 384 |
+
x_samples_ddim = 255.*x_samples_ddim
|
| 385 |
+
x_samples_ddim = x_samples_ddim.astype(np.uint8)
|
| 386 |
+
|
| 387 |
+
return [im_pose[:,:,::-1].astype(np.uint8), x_samples_ddim]
|
| 388 |
+
|
| 389 |
+
if __name__ == '__main__':
|
| 390 |
+
model = Model_all('cpu')
|
dist_util.py
ADDED
|
@@ -0,0 +1,91 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Modified from https://github.com/open-mmlab/mmcv/blob/master/mmcv/runner/dist_utils.py # noqa: E501
|
| 2 |
+
import functools
|
| 3 |
+
import os
|
| 4 |
+
import subprocess
|
| 5 |
+
import torch
|
| 6 |
+
import torch.distributed as dist
|
| 7 |
+
import torch.multiprocessing as mp
|
| 8 |
+
from torch.nn.parallel import DataParallel, DistributedDataParallel
|
| 9 |
+
|
| 10 |
+
|
| 11 |
+
def init_dist(launcher, backend='nccl', **kwargs):
|
| 12 |
+
if mp.get_start_method(allow_none=True) is None:
|
| 13 |
+
mp.set_start_method('spawn')
|
| 14 |
+
if launcher == 'pytorch':
|
| 15 |
+
_init_dist_pytorch(backend, **kwargs)
|
| 16 |
+
elif launcher == 'slurm':
|
| 17 |
+
_init_dist_slurm(backend, **kwargs)
|
| 18 |
+
else:
|
| 19 |
+
raise ValueError(f'Invalid launcher type: {launcher}')
|
| 20 |
+
|
| 21 |
+
|
| 22 |
+
def _init_dist_pytorch(backend, **kwargs):
|
| 23 |
+
rank = int(os.environ['RANK'])
|
| 24 |
+
num_gpus = torch.cuda.device_count()
|
| 25 |
+
torch.cuda.set_device(rank % num_gpus)
|
| 26 |
+
dist.init_process_group(backend=backend, **kwargs)
|
| 27 |
+
|
| 28 |
+
|
| 29 |
+
def _init_dist_slurm(backend, port=None):
|
| 30 |
+
"""Initialize slurm distributed training environment.
|
| 31 |
+
|
| 32 |
+
If argument ``port`` is not specified, then the master port will be system
|
| 33 |
+
environment variable ``MASTER_PORT``. If ``MASTER_PORT`` is not in system
|
| 34 |
+
environment variable, then a default port ``29500`` will be used.
|
| 35 |
+
|
| 36 |
+
Args:
|
| 37 |
+
backend (str): Backend of torch.distributed.
|
| 38 |
+
port (int, optional): Master port. Defaults to None.
|
| 39 |
+
"""
|
| 40 |
+
proc_id = int(os.environ['SLURM_PROCID'])
|
| 41 |
+
ntasks = int(os.environ['SLURM_NTASKS'])
|
| 42 |
+
node_list = os.environ['SLURM_NODELIST']
|
| 43 |
+
num_gpus = torch.cuda.device_count()
|
| 44 |
+
torch.cuda.set_device(proc_id % num_gpus)
|
| 45 |
+
addr = subprocess.getoutput(f'scontrol show hostname {node_list} | head -n1')
|
| 46 |
+
# specify master port
|
| 47 |
+
if port is not None:
|
| 48 |
+
os.environ['MASTER_PORT'] = str(port)
|
| 49 |
+
elif 'MASTER_PORT' in os.environ:
|
| 50 |
+
pass # use MASTER_PORT in the environment variable
|
| 51 |
+
else:
|
| 52 |
+
# 29500 is torch.distributed default port
|
| 53 |
+
os.environ['MASTER_PORT'] = '29500'
|
| 54 |
+
os.environ['MASTER_ADDR'] = addr
|
| 55 |
+
os.environ['WORLD_SIZE'] = str(ntasks)
|
| 56 |
+
os.environ['LOCAL_RANK'] = str(proc_id % num_gpus)
|
| 57 |
+
os.environ['RANK'] = str(proc_id)
|
| 58 |
+
dist.init_process_group(backend=backend)
|
| 59 |
+
|
| 60 |
+
|
| 61 |
+
def get_dist_info():
|
| 62 |
+
if dist.is_available():
|
| 63 |
+
initialized = dist.is_initialized()
|
| 64 |
+
else:
|
| 65 |
+
initialized = False
|
| 66 |
+
if initialized:
|
| 67 |
+
rank = dist.get_rank()
|
| 68 |
+
world_size = dist.get_world_size()
|
| 69 |
+
else:
|
| 70 |
+
rank = 0
|
| 71 |
+
world_size = 1
|
| 72 |
+
return rank, world_size
|
| 73 |
+
|
| 74 |
+
|
| 75 |
+
def master_only(func):
|
| 76 |
+
|
| 77 |
+
@functools.wraps(func)
|
| 78 |
+
def wrapper(*args, **kwargs):
|
| 79 |
+
rank, _ = get_dist_info()
|
| 80 |
+
if rank == 0:
|
| 81 |
+
return func(*args, **kwargs)
|
| 82 |
+
|
| 83 |
+
return wrapper
|
| 84 |
+
|
| 85 |
+
def get_bare_model(net):
|
| 86 |
+
"""Get bare model, especially under wrapping with
|
| 87 |
+
DistributedDataParallel or DataParallel.
|
| 88 |
+
"""
|
| 89 |
+
if isinstance(net, (DataParallel, DistributedDataParallel)):
|
| 90 |
+
net = net.module
|
| 91 |
+
return net
|
environment.yaml
ADDED
|
@@ -0,0 +1,31 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
name: ldm
|
| 2 |
+
channels:
|
| 3 |
+
- pytorch
|
| 4 |
+
- defaults
|
| 5 |
+
dependencies:
|
| 6 |
+
- python=3.8.5
|
| 7 |
+
- pip=20.3
|
| 8 |
+
- cudatoolkit=11.3
|
| 9 |
+
- pytorch=1.11.0
|
| 10 |
+
- torchvision=0.12.0
|
| 11 |
+
- numpy=1.19.2
|
| 12 |
+
- pip:
|
| 13 |
+
- albumentations==0.4.3
|
| 14 |
+
- diffusers
|
| 15 |
+
- opencv-python==4.1.2.30
|
| 16 |
+
- pudb==2019.2
|
| 17 |
+
- invisible-watermark
|
| 18 |
+
- imageio==2.9.0
|
| 19 |
+
- imageio-ffmpeg==0.4.2
|
| 20 |
+
- pytorch-lightning==1.4.2
|
| 21 |
+
- omegaconf==2.1.1
|
| 22 |
+
- test-tube>=0.7.5
|
| 23 |
+
- streamlit>=0.73.1
|
| 24 |
+
- einops==0.3.0
|
| 25 |
+
- torch-fidelity==0.3.0
|
| 26 |
+
- transformers==4.19.2
|
| 27 |
+
- torchmetrics==0.6.0
|
| 28 |
+
- kornia==0.6
|
| 29 |
+
- -e git+https://github.com/CompVis/taming-transformers.git@master#egg=taming-transformers
|
| 30 |
+
- -e git+https://github.com/openai/CLIP.git@main#egg=clip
|
| 31 |
+
- -e .
|
examples/edit_cat/edge.png
ADDED
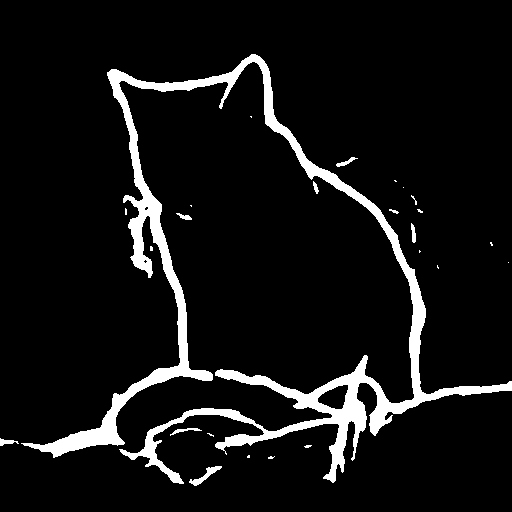
|
examples/edit_cat/edge_2.png
ADDED
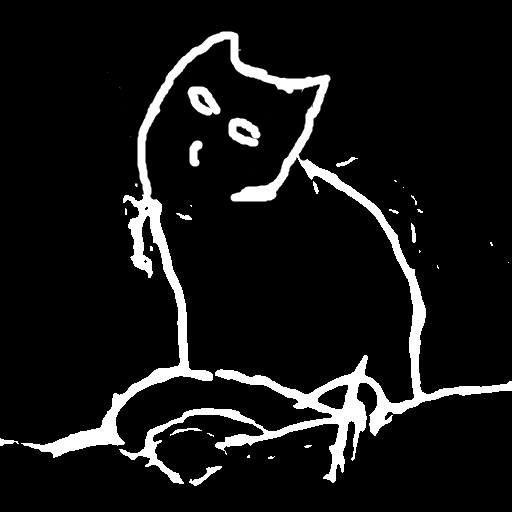
|
examples/edit_cat/im.png
ADDED

|
examples/edit_cat/mask.png
ADDED
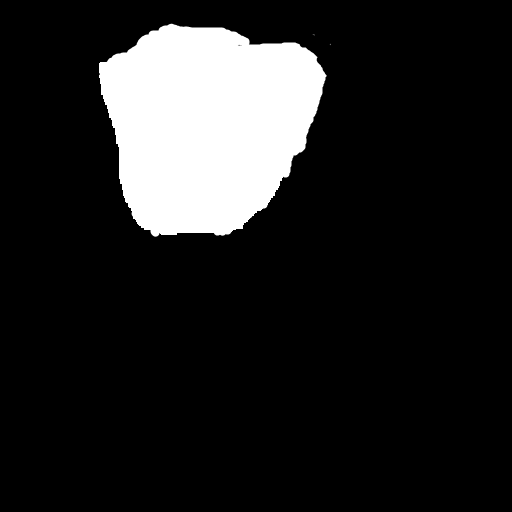
|
examples/keypose/iron.png
ADDED
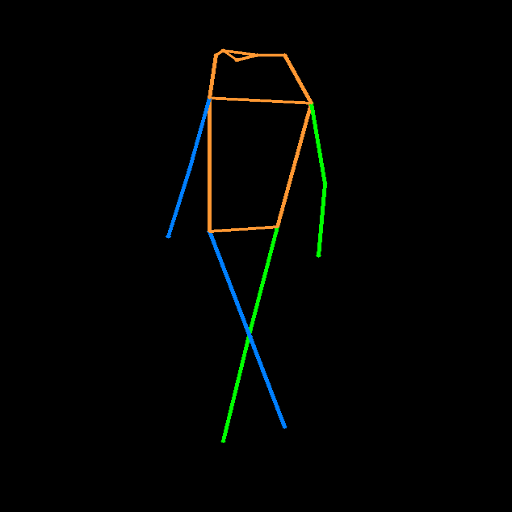
|
examples/seg/dinner.png
ADDED

|
examples/seg/motor.png
ADDED

|
examples/seg_sketch/edge.png
ADDED
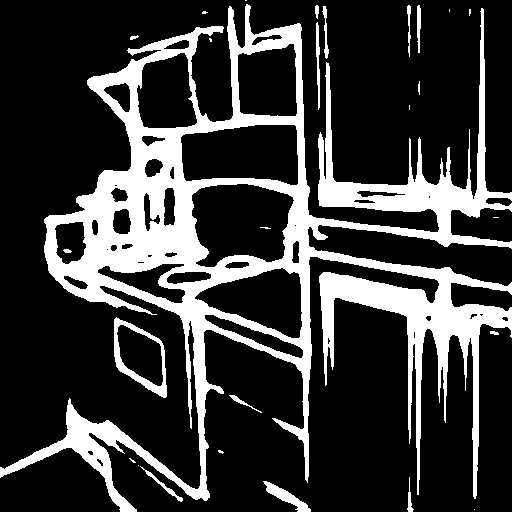
|
examples/seg_sketch/mask.png
ADDED

|
examples/sketch/car.png
ADDED
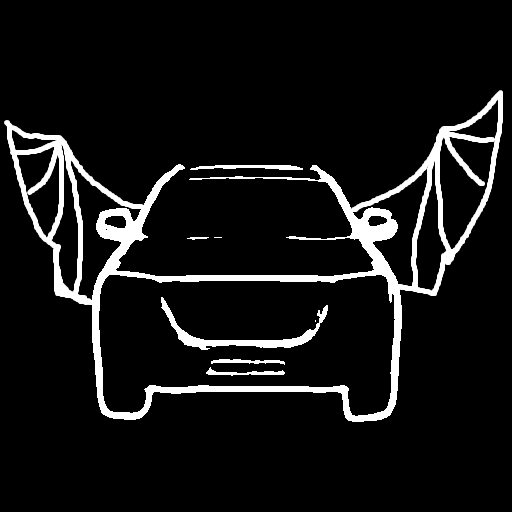
|
examples/sketch/girl.jpeg
ADDED

|
examples/sketch/human.png
ADDED
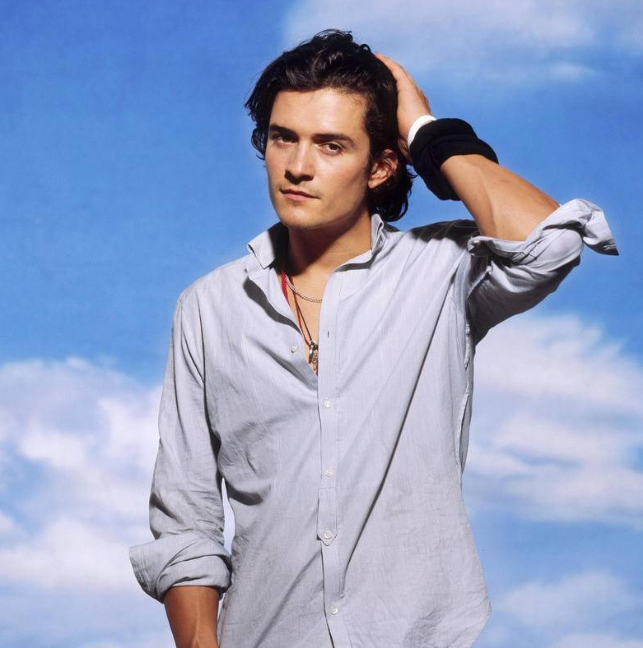
|
examples/sketch/scenery.jpg
ADDED

|
examples/sketch/scenery2.jpg
ADDED

|
experiments/README.md
ADDED
|
File without changes
|
gradio_keypose.py
ADDED
|
@@ -0,0 +1,254 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import os
|
| 2 |
+
import os.path as osp
|
| 3 |
+
|
| 4 |
+
import cv2
|
| 5 |
+
import numpy as np
|
| 6 |
+
import torch
|
| 7 |
+
from basicsr.utils import img2tensor, tensor2img
|
| 8 |
+
from pytorch_lightning import seed_everything
|
| 9 |
+
from ldm.models.diffusion.plms import PLMSSampler
|
| 10 |
+
from ldm.modules.encoders.adapter import Adapter
|
| 11 |
+
from ldm.util import instantiate_from_config
|
| 12 |
+
from model_edge import pidinet
|
| 13 |
+
import gradio as gr
|
| 14 |
+
from omegaconf import OmegaConf
|
| 15 |
+
import mmcv
|
| 16 |
+
from mmdet.apis import inference_detector, init_detector
|
| 17 |
+
from mmpose.apis import (inference_top_down_pose_model, init_pose_model, process_mmdet_results, vis_pose_result)
|
| 18 |
+
|
| 19 |
+
skeleton = [[15, 13], [13, 11], [16, 14], [14, 12], [11, 12], [5, 11], [6, 12], [5, 6], [5, 7], [6, 8], [7, 9], [8, 10],
|
| 20 |
+
[1, 2], [0, 1], [0, 2], [1, 3], [2, 4], [3, 5], [4, 6]]
|
| 21 |
+
|
| 22 |
+
pose_kpt_color = [[51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [0, 255, 0],
|
| 23 |
+
[255, 128, 0], [0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0],
|
| 24 |
+
[0, 255, 0], [255, 128, 0], [0, 255, 0], [255, 128, 0]]
|
| 25 |
+
|
| 26 |
+
pose_link_color = [[0, 255, 0], [0, 255, 0], [255, 128, 0], [255, 128, 0],
|
| 27 |
+
[51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255], [0, 255, 0], [255, 128, 0],
|
| 28 |
+
[0, 255, 0], [255, 128, 0], [51, 153, 255], [51, 153, 255], [51, 153, 255], [51, 153, 255],
|
| 29 |
+
[51, 153, 255], [51, 153, 255], [51, 153, 255]]
|
| 30 |
+
|
| 31 |
+
def imshow_keypoints(img,
|
| 32 |
+
pose_result,
|
| 33 |
+
skeleton=None,
|
| 34 |
+
kpt_score_thr=0.1,
|
| 35 |
+
pose_kpt_color=None,
|
| 36 |
+
pose_link_color=None,
|
| 37 |
+
radius=4,
|
| 38 |
+
thickness=1):
|
| 39 |
+
"""Draw keypoints and links on an image.
|
| 40 |
+
|
| 41 |
+
Args:
|
| 42 |
+
img (ndarry): The image to draw poses on.
|
| 43 |
+
pose_result (list[kpts]): The poses to draw. Each element kpts is
|
| 44 |
+
a set of K keypoints as an Kx3 numpy.ndarray, where each
|
| 45 |
+
keypoint is represented as x, y, score.
|
| 46 |
+
kpt_score_thr (float, optional): Minimum score of keypoints
|
| 47 |
+
to be shown. Default: 0.3.
|
| 48 |
+
pose_kpt_color (np.array[Nx3]`): Color of N keypoints. If None,
|
| 49 |
+
the keypoint will not be drawn.
|
| 50 |
+
pose_link_color (np.array[Mx3]): Color of M links. If None, the
|
| 51 |
+
links will not be drawn.
|
| 52 |
+
thickness (int): Thickness of lines.
|
| 53 |
+
"""
|
| 54 |
+
|
| 55 |
+
img_h, img_w, _ = img.shape
|
| 56 |
+
img = np.zeros(img.shape)
|
| 57 |
+
|
| 58 |
+
for idx, kpts in enumerate(pose_result):
|
| 59 |
+
if idx > 1:
|
| 60 |
+
continue
|
| 61 |
+
kpts = kpts['keypoints']
|
| 62 |
+
# print(kpts)
|
| 63 |
+
kpts = np.array(kpts, copy=False)
|
| 64 |
+
|
| 65 |
+
# draw each point on image
|
| 66 |
+
if pose_kpt_color is not None:
|
| 67 |
+
assert len(pose_kpt_color) == len(kpts)
|
| 68 |
+
|
| 69 |
+
for kid, kpt in enumerate(kpts):
|
| 70 |
+
x_coord, y_coord, kpt_score = int(kpt[0]), int(kpt[1]), kpt[2]
|
| 71 |
+
|
| 72 |
+
if kpt_score < kpt_score_thr or pose_kpt_color[kid] is None:
|
| 73 |
+
# skip the point that should not be drawn
|
| 74 |
+
continue
|
| 75 |
+
|
| 76 |
+
color = tuple(int(c) for c in pose_kpt_color[kid])
|
| 77 |
+
cv2.circle(img, (int(x_coord), int(y_coord)), radius, color, -1)
|
| 78 |
+
|
| 79 |
+
# draw links
|
| 80 |
+
if skeleton is not None and pose_link_color is not None:
|
| 81 |
+
assert len(pose_link_color) == len(skeleton)
|
| 82 |
+
|
| 83 |
+
for sk_id, sk in enumerate(skeleton):
|
| 84 |
+
pos1 = (int(kpts[sk[0], 0]), int(kpts[sk[0], 1]))
|
| 85 |
+
pos2 = (int(kpts[sk[1], 0]), int(kpts[sk[1], 1]))
|
| 86 |
+
|
| 87 |
+
if (pos1[0] <= 0 or pos1[0] >= img_w or pos1[1] <= 0 or pos1[1] >= img_h or pos2[0] <= 0
|
| 88 |
+
or pos2[0] >= img_w or pos2[1] <= 0 or pos2[1] >= img_h or kpts[sk[0], 2] < kpt_score_thr
|
| 89 |
+
or kpts[sk[1], 2] < kpt_score_thr or pose_link_color[sk_id] is None):
|
| 90 |
+
# skip the link that should not be drawn
|
| 91 |
+
continue
|
| 92 |
+
color = tuple(int(c) for c in pose_link_color[sk_id])
|
| 93 |
+
cv2.line(img, pos1, pos2, color, thickness=thickness)
|
| 94 |
+
|
| 95 |
+
return img
|
| 96 |
+
|
| 97 |
+
def load_model_from_config(config, ckpt, verbose=False):
|
| 98 |
+
print(f"Loading model from {ckpt}")
|
| 99 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 100 |
+
if "global_step" in pl_sd:
|
| 101 |
+
print(f"Global Step: {pl_sd['global_step']}")
|
| 102 |
+
if "state_dict" in pl_sd:
|
| 103 |
+
sd = pl_sd["state_dict"]
|
| 104 |
+
else:
|
| 105 |
+
sd = pl_sd
|
| 106 |
+
model = instantiate_from_config(config.model)
|
| 107 |
+
m, u = model.load_state_dict(sd, strict=False)
|
| 108 |
+
|
| 109 |
+
model.cuda()
|
| 110 |
+
model.eval()
|
| 111 |
+
return model
|
| 112 |
+
|
| 113 |
+
device = 'cuda' if torch.cuda.is_available() else 'cpu'
|
| 114 |
+
config = OmegaConf.load("configs/stable-diffusion/test_keypose.yaml")
|
| 115 |
+
config.model.params.cond_stage_config.params.device = device
|
| 116 |
+
model = load_model_from_config(config, "models/sd-v1-4.ckpt").to(device)
|
| 117 |
+
current_base = 'sd-v1-4.ckpt'
|
| 118 |
+
model_ad = Adapter(cin=int(3*64), channels=[320, 640, 1280, 1280][:4], nums_rb=2, ksize=1, sk=True, use_conv=False).to(device)
|
| 119 |
+
model_ad.load_state_dict(torch.load("models/t2iadapter_keypose_sd14v1.pth"))
|
| 120 |
+
sampler = PLMSSampler(model)
|
| 121 |
+
## mmpose
|
| 122 |
+
det_config = 'models/faster_rcnn_r50_fpn_coco.py'
|
| 123 |
+
det_checkpoint = 'models/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth'
|
| 124 |
+
pose_config = 'models/hrnet_w48_coco_256x192.py'
|
| 125 |
+
pose_checkpoint = 'models/hrnet_w48_coco_256x192-b9e0b3ab_20200708.pth'
|
| 126 |
+
det_cat_id = 1
|
| 127 |
+
bbox_thr = 0.2
|
| 128 |
+
## detector
|
| 129 |
+
det_config_mmcv = mmcv.Config.fromfile(det_config)
|
| 130 |
+
det_model = init_detector(det_config_mmcv, det_checkpoint, device=device)
|
| 131 |
+
pose_config_mmcv = mmcv.Config.fromfile(pose_config)
|
| 132 |
+
pose_model = init_pose_model(pose_config_mmcv, pose_checkpoint, device=device)
|
| 133 |
+
W, H = 512, 512
|
| 134 |
+
|
| 135 |
+
|
| 136 |
+
def process(input_img, type_in, prompt, neg_prompt, fix_sample, scale, con_strength, base_model):
|
| 137 |
+
global current_base
|
| 138 |
+
if current_base != base_model:
|
| 139 |
+
ckpt = os.path.join("models", base_model)
|
| 140 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 141 |
+
if "state_dict" in pl_sd:
|
| 142 |
+
sd = pl_sd["state_dict"]
|
| 143 |
+
else:
|
| 144 |
+
sd = pl_sd
|
| 145 |
+
model.load_state_dict(sd, strict=False)
|
| 146 |
+
current_base = base_model
|
| 147 |
+
con_strength = int((1-con_strength)*50)
|
| 148 |
+
if fix_sample == 'True':
|
| 149 |
+
seed_everything(42)
|
| 150 |
+
im = cv2.resize(input_img,(W,H))
|
| 151 |
+
|
| 152 |
+
if type_in == 'Keypose':
|
| 153 |
+
im_pose = im.copy()
|
| 154 |
+
im = img2tensor(im).unsqueeze(0)/255.
|
| 155 |
+
elif type_in == 'Image':
|
| 156 |
+
image = im.copy()
|
| 157 |
+
im = img2tensor(im).unsqueeze(0)/255.
|
| 158 |
+
mmdet_results = inference_detector(det_model, image)
|
| 159 |
+
# keep the person class bounding boxes.
|
| 160 |
+
person_results = process_mmdet_results(mmdet_results, det_cat_id)
|
| 161 |
+
|
| 162 |
+
# optional
|
| 163 |
+
return_heatmap = False
|
| 164 |
+
dataset = pose_model.cfg.data['test']['type']
|
| 165 |
+
|
| 166 |
+
# e.g. use ('backbone', ) to return backbone feature
|
| 167 |
+
output_layer_names = None
|
| 168 |
+
pose_results, returned_outputs = inference_top_down_pose_model(
|
| 169 |
+
pose_model,
|
| 170 |
+
image,
|
| 171 |
+
person_results,
|
| 172 |
+
bbox_thr=bbox_thr,
|
| 173 |
+
format='xyxy',
|
| 174 |
+
dataset=dataset,
|
| 175 |
+
dataset_info=None,
|
| 176 |
+
return_heatmap=return_heatmap,
|
| 177 |
+
outputs=output_layer_names)
|
| 178 |
+
|
| 179 |
+
# show the results
|
| 180 |
+
im_pose = imshow_keypoints(
|
| 181 |
+
image,
|
| 182 |
+
pose_results,
|
| 183 |
+
skeleton=skeleton,
|
| 184 |
+
pose_kpt_color=pose_kpt_color,
|
| 185 |
+
pose_link_color=pose_link_color,
|
| 186 |
+
radius=2,
|
| 187 |
+
thickness=2)
|
| 188 |
+
im_pose = cv2.resize(im_pose,(W,H))
|
| 189 |
+
|
| 190 |
+
with torch.no_grad():
|
| 191 |
+
c = model.get_learned_conditioning([prompt])
|
| 192 |
+
nc = model.get_learned_conditioning([neg_prompt])
|
| 193 |
+
# extract condition features
|
| 194 |
+
pose = img2tensor(im_pose, bgr2rgb=True, float32=True)/255.
|
| 195 |
+
pose = pose.unsqueeze(0)
|
| 196 |
+
features_adapter = model_ad(pose.to(device))
|
| 197 |
+
|
| 198 |
+
shape = [4, W//8, H//8]
|
| 199 |
+
|
| 200 |
+
# sampling
|
| 201 |
+
samples_ddim, _ = sampler.sample(S=50,
|
| 202 |
+
conditioning=c,
|
| 203 |
+
batch_size=1,
|
| 204 |
+
shape=shape,
|
| 205 |
+
verbose=False,
|
| 206 |
+
unconditional_guidance_scale=scale,
|
| 207 |
+
unconditional_conditioning=nc,
|
| 208 |
+
eta=0.0,
|
| 209 |
+
x_T=None,
|
| 210 |
+
features_adapter1=features_adapter,
|
| 211 |
+
mode = 'sketch',
|
| 212 |
+
con_strength = con_strength)
|
| 213 |
+
|
| 214 |
+
x_samples_ddim = model.decode_first_stage(samples_ddim)
|
| 215 |
+
x_samples_ddim = torch.clamp((x_samples_ddim + 1.0) / 2.0, min=0.0, max=1.0)
|
| 216 |
+
x_samples_ddim = x_samples_ddim.to('cpu')
|
| 217 |
+
x_samples_ddim = x_samples_ddim.permute(0, 2, 3, 1).numpy()[0]
|
| 218 |
+
x_samples_ddim = 255.*x_samples_ddim
|
| 219 |
+
x_samples_ddim = x_samples_ddim.astype(np.uint8)
|
| 220 |
+
|
| 221 |
+
return [im_pose[:,:,::-1].astype(np.uint8), x_samples_ddim]
|
| 222 |
+
|
| 223 |
+
DESCRIPTION = '''# T2I-Adapter (Keypose)
|
| 224 |
+
[Paper](https://arxiv.org/abs/2302.08453) [GitHub](https://github.com/TencentARC/T2I-Adapter)
|
| 225 |
+
|
| 226 |
+
This gradio demo is for keypose-guided generation. The current functions include:
|
| 227 |
+
- Keypose to Image Generation
|
| 228 |
+
- Image to Image Generation
|
| 229 |
+
- Generation with **Anything** setting
|
| 230 |
+
'''
|
| 231 |
+
block = gr.Blocks().queue()
|
| 232 |
+
with block:
|
| 233 |
+
with gr.Row():
|
| 234 |
+
gr.Markdown(DESCRIPTION)
|
| 235 |
+
with gr.Row():
|
| 236 |
+
with gr.Column():
|
| 237 |
+
input_img = gr.Image(source='upload', type="numpy")
|
| 238 |
+
prompt = gr.Textbox(label="Prompt")
|
| 239 |
+
neg_prompt = gr.Textbox(label="Negative Prompt",
|
| 240 |
+
value='ugly, tiling, poorly drawn hands, poorly drawn feet, poorly drawn face, out of frame, extra limbs, disfigured, deformed, body out of frame, bad anatomy, watermark, signature, cut off, low contrast, underexposed, overexposed, bad art, beginner, amateur, distorted face')
|
| 241 |
+
with gr.Row():
|
| 242 |
+
type_in = gr.inputs.Radio(['Keypose', 'Image'], type="value", default='Image', label='Input Types\n (You can input an image or a keypose map)')
|
| 243 |
+
fix_sample = gr.inputs.Radio(['True', 'False'], type="value", default='False', label='Fix Sampling\n (Fix the random seed to produce a fixed output)')
|
| 244 |
+
run_button = gr.Button(label="Run")
|
| 245 |
+
con_strength = gr.Slider(label="Controling Strength (The guidance strength of the keypose to the result)", minimum=0, maximum=1, value=1, step=0.1)
|
| 246 |
+
scale = gr.Slider(label="Guidance Scale (Classifier free guidance)", minimum=0.1, maximum=30.0, value=9, step=0.1)
|
| 247 |
+
base_model = gr.inputs.Radio(['sd-v1-4.ckpt', 'anything-v4.0-pruned.ckpt'], type="value", default='sd-v1-4.ckpt', label='The base model you want to use')
|
| 248 |
+
with gr.Column():
|
| 249 |
+
result = gr.Gallery(label='Output', show_label=False, elem_id="gallery").style(grid=2, height='auto')
|
| 250 |
+
ips = [input_img, type_in, prompt, neg_prompt, fix_sample, scale, con_strength, base_model]
|
| 251 |
+
run_button.click(fn=process, inputs=ips, outputs=[result])
|
| 252 |
+
|
| 253 |
+
block.launch(server_name='0.0.0.0')
|
| 254 |
+
|
gradio_sketch.py
ADDED
|
@@ -0,0 +1,147 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import os
|
| 2 |
+
import os.path as osp
|
| 3 |
+
|
| 4 |
+
import cv2
|
| 5 |
+
import numpy as np
|
| 6 |
+
import torch
|
| 7 |
+
from basicsr.utils import img2tensor, tensor2img
|
| 8 |
+
from pytorch_lightning import seed_everything
|
| 9 |
+
from ldm.models.diffusion.plms import PLMSSampler
|
| 10 |
+
from ldm.modules.encoders.adapter import Adapter
|
| 11 |
+
from ldm.util import instantiate_from_config
|
| 12 |
+
from model_edge import pidinet
|
| 13 |
+
import gradio as gr
|
| 14 |
+
from omegaconf import OmegaConf
|
| 15 |
+
|
| 16 |
+
|
| 17 |
+
def load_model_from_config(config, ckpt, verbose=False):
|
| 18 |
+
print(f"Loading model from {ckpt}")
|
| 19 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 20 |
+
if "global_step" in pl_sd:
|
| 21 |
+
print(f"Global Step: {pl_sd['global_step']}")
|
| 22 |
+
if "state_dict" in pl_sd:
|
| 23 |
+
sd = pl_sd["state_dict"]
|
| 24 |
+
else:
|
| 25 |
+
sd = pl_sd
|
| 26 |
+
model = instantiate_from_config(config.model)
|
| 27 |
+
m, u = model.load_state_dict(sd, strict=False)
|
| 28 |
+
# if len(m) > 0 and verbose:
|
| 29 |
+
# print("missing keys:")
|
| 30 |
+
# print(m)
|
| 31 |
+
# if len(u) > 0 and verbose:
|
| 32 |
+
# print("unexpected keys:")
|
| 33 |
+
# print(u)
|
| 34 |
+
|
| 35 |
+
model.cuda()
|
| 36 |
+
model.eval()
|
| 37 |
+
return model
|
| 38 |
+
|
| 39 |
+
device = 'cuda' if torch.cuda.is_available() else 'cpu'
|
| 40 |
+
config = OmegaConf.load("configs/stable-diffusion/test_sketch.yaml")
|
| 41 |
+
config.model.params.cond_stage_config.params.device = device
|
| 42 |
+
model = load_model_from_config(config, "models/sd-v1-4.ckpt").to(device)
|
| 43 |
+
current_base = 'sd-v1-4.ckpt'
|
| 44 |
+
model_ad = Adapter(channels=[320, 640, 1280, 1280][:4], nums_rb=2, ksize=1, sk=True, use_conv=False).to(device)
|
| 45 |
+
model_ad.load_state_dict(torch.load("models/t2iadapter_sketch_sd14v1.pth"))
|
| 46 |
+
net_G = pidinet()
|
| 47 |
+
ckp = torch.load('models/table5_pidinet.pth', map_location='cpu')['state_dict']
|
| 48 |
+
net_G.load_state_dict({k.replace('module.',''):v for k, v in ckp.items()})
|
| 49 |
+
net_G.to(device)
|
| 50 |
+
sampler = PLMSSampler(model)
|
| 51 |
+
save_memory=True
|
| 52 |
+
W, H = 512, 512
|
| 53 |
+
|
| 54 |
+
|
| 55 |
+
def process(input_img, type_in, color_back, prompt, neg_prompt, fix_sample, scale, con_strength, base_model):
|
| 56 |
+
global current_base
|
| 57 |
+
if current_base != base_model:
|
| 58 |
+
ckpt = os.path.join("models", base_model)
|
| 59 |
+
pl_sd = torch.load(ckpt, map_location="cpu")
|
| 60 |
+
if "state_dict" in pl_sd:
|
| 61 |
+
sd = pl_sd["state_dict"]
|
| 62 |
+
else:
|
| 63 |
+
sd = pl_sd
|
| 64 |
+
model.load_state_dict(sd, strict=False) #load_model_from_config(config, os.path.join("models", base_model)).to(device)
|
| 65 |
+
current_base = base_model
|
| 66 |
+
con_strength = int((1-con_strength)*50)
|
| 67 |
+
if fix_sample == 'True':
|
| 68 |
+
seed_everything(42)
|
| 69 |
+
im = cv2.resize(input_img,(W,H))
|
| 70 |
+
|
| 71 |
+
if type_in == 'Sketch':
|
| 72 |
+
if color_back == 'White':
|
| 73 |
+
im = 255-im
|
| 74 |
+
im_edge = im.copy()
|
| 75 |
+
im = img2tensor(im)[0].unsqueeze(0).unsqueeze(0)/255.
|
| 76 |
+
im = im>0.5
|
| 77 |
+
im = im.float()
|
| 78 |
+
elif type_in == 'Image':
|
| 79 |
+
im = img2tensor(im).unsqueeze(0)/255.
|
| 80 |
+
im = net_G(im.to(device))[-1]
|
| 81 |
+
im = im>0.5
|
| 82 |
+
im = im.float()
|
| 83 |
+
im_edge = tensor2img(im)
|
| 84 |
+
|
| 85 |
+
with torch.no_grad():
|
| 86 |
+
c = model.get_learned_conditioning([prompt])
|
| 87 |
+
nc = model.get_learned_conditioning([neg_prompt])
|
| 88 |
+
# extract condition features
|
| 89 |
+
features_adapter = model_ad(im.to(device))
|
| 90 |
+
shape = [4, W//8, H//8]
|
| 91 |
+
|
| 92 |
+
# sampling
|
| 93 |
+
samples_ddim, _ = sampler.sample(S=50,
|
| 94 |
+
conditioning=c,
|
| 95 |
+
batch_size=1,
|
| 96 |
+
shape=shape,
|
| 97 |
+
verbose=False,
|
| 98 |
+
unconditional_guidance_scale=scale,
|
| 99 |
+
unconditional_conditioning=nc,
|
| 100 |
+
eta=0.0,
|
| 101 |
+
x_T=None,
|
| 102 |
+
features_adapter1=features_adapter,
|
| 103 |
+
mode = 'sketch',
|
| 104 |
+
con_strength = con_strength)
|
| 105 |
+
|
| 106 |
+
x_samples_ddim = model.decode_first_stage(samples_ddim)
|
| 107 |
+
x_samples_ddim = torch.clamp((x_samples_ddim + 1.0) / 2.0, min=0.0, max=1.0)
|
| 108 |
+
x_samples_ddim = x_samples_ddim.to('cpu')
|
| 109 |
+
x_samples_ddim = x_samples_ddim.permute(0, 2, 3, 1).numpy()[0]
|
| 110 |
+
x_samples_ddim = 255.*x_samples_ddim
|
| 111 |
+
x_samples_ddim = x_samples_ddim.astype(np.uint8)
|
| 112 |
+
|
| 113 |
+
return [im_edge, x_samples_ddim]
|
| 114 |
+
|
| 115 |
+
DESCRIPTION = '''# T2I-Adapter (Sketch)
|
| 116 |
+
[Paper](https://arxiv.org/abs/2302.08453) [GitHub](https://github.com/TencentARC/T2I-Adapter)
|
| 117 |
+
|
| 118 |
+
This gradio demo is for sketch-guided generation. The current functions include:
|
| 119 |
+
- Sketch to Image Generation
|
| 120 |
+
- Image to Image Generation
|
| 121 |
+
- Generation with **Anything** setting
|
| 122 |
+
'''
|
| 123 |
+
block = gr.Blocks().queue()
|
| 124 |
+
with block:
|
| 125 |
+
with gr.Row():
|
| 126 |
+
gr.Markdown(DESCRIPTION)
|
| 127 |
+
with gr.Row():
|
| 128 |
+
with gr.Column():
|
| 129 |
+
input_img = gr.Image(source='upload', type="numpy")
|
| 130 |
+
prompt = gr.Textbox(label="Prompt")
|
| 131 |
+
neg_prompt = gr.Textbox(label="Negative Prompt",
|
| 132 |
+
value='ugly, tiling, poorly drawn hands, poorly drawn feet, poorly drawn face, out of frame, extra limbs, disfigured, deformed, body out of frame, bad anatomy, watermark, signature, cut off, low contrast, underexposed, overexposed, bad art, beginner, amateur, distorted face')
|
| 133 |
+
with gr.Row():
|
| 134 |
+
type_in = gr.inputs.Radio(['Sketch', 'Image'], type="value", default='Image', label='Input Types\n (You can input an image or a sketch)')
|
| 135 |
+
color_back = gr.inputs.Radio(['White', 'Black'], type="value", default='Black', label='Color of the sketch background\n (Only work for sketch input)')
|
| 136 |
+
run_button = gr.Button(label="Run")
|
| 137 |
+
con_strength = gr.Slider(label="Controling Strength (The guidance strength of the sketch to the result)", minimum=0, maximum=1, value=0.4, step=0.1)
|
| 138 |
+
scale = gr.Slider(label="Guidance Scale (Classifier free guidance)", minimum=0.1, maximum=30.0, value=9, step=0.1)
|
| 139 |
+
fix_sample = gr.inputs.Radio(['True', 'False'], type="value", default='False', label='Fix Sampling\n (Fix the random seed)')
|
| 140 |
+
base_model = gr.inputs.Radio(['sd-v1-4.ckpt', 'anything-v4.0-pruned.ckpt'], type="value", default='sd-v1-4.ckpt', label='The base model you want to use')
|
| 141 |
+
with gr.Column():
|
| 142 |
+
result = gr.Gallery(label='Output', show_label=False, elem_id="gallery").style(grid=2, height='auto')
|
| 143 |
+
ips = [input_img, type_in, color_back, prompt, neg_prompt, fix_sample, scale, con_strength, base_model]
|
| 144 |
+
run_button.click(fn=process, inputs=ips, outputs=[result])
|
| 145 |
+
|
| 146 |
+
block.launch(server_name='0.0.0.0')
|
| 147 |
+
|
ldm/data/__init__.py
ADDED
|
File without changes
|
ldm/data/base.py
ADDED
|
@@ -0,0 +1,23 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from abc import abstractmethod
|
| 2 |
+
from torch.utils.data import Dataset, ConcatDataset, ChainDataset, IterableDataset
|
| 3 |
+
|
| 4 |
+
|
| 5 |
+
class Txt2ImgIterableBaseDataset(IterableDataset):
|
| 6 |
+
'''
|
| 7 |
+
Define an interface to make the IterableDatasets for text2img data chainable
|
| 8 |
+
'''
|
| 9 |
+
def __init__(self, num_records=0, valid_ids=None, size=256):
|
| 10 |
+
super().__init__()
|
| 11 |
+
self.num_records = num_records
|
| 12 |
+
self.valid_ids = valid_ids
|
| 13 |
+
self.sample_ids = valid_ids
|
| 14 |
+
self.size = size
|
| 15 |
+
|
| 16 |
+
print(f'{self.__class__.__name__} dataset contains {self.__len__()} examples.')
|
| 17 |
+
|
| 18 |
+
def __len__(self):
|
| 19 |
+
return self.num_records
|
| 20 |
+
|
| 21 |
+
@abstractmethod
|
| 22 |
+
def __iter__(self):
|
| 23 |
+
pass
|
ldm/data/imagenet.py
ADDED
|
@@ -0,0 +1,394 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import os, yaml, pickle, shutil, tarfile, glob
|
| 2 |
+
import cv2
|
| 3 |
+
import albumentations
|
| 4 |
+
import PIL
|
| 5 |
+
import numpy as np
|
| 6 |
+
import torchvision.transforms.functional as TF
|
| 7 |
+
from omegaconf import OmegaConf
|
| 8 |
+
from functools import partial
|
| 9 |
+
from PIL import Image
|
| 10 |
+
from tqdm import tqdm
|
| 11 |
+
from torch.utils.data import Dataset, Subset
|
| 12 |
+
|
| 13 |
+
import taming.data.utils as tdu
|
| 14 |
+
from taming.data.imagenet import str_to_indices, give_synsets_from_indices, download, retrieve
|
| 15 |
+
from taming.data.imagenet import ImagePaths
|
| 16 |
+
|
| 17 |
+
from ldm.modules.image_degradation import degradation_fn_bsr, degradation_fn_bsr_light
|
| 18 |
+
|
| 19 |
+
|
| 20 |
+
def synset2idx(path_to_yaml="data/index_synset.yaml"):
|
| 21 |
+
with open(path_to_yaml) as f:
|
| 22 |
+
di2s = yaml.load(f)
|
| 23 |
+
return dict((v,k) for k,v in di2s.items())
|
| 24 |
+
|
| 25 |
+
|
| 26 |
+
class ImageNetBase(Dataset):
|
| 27 |
+
def __init__(self, config=None):
|
| 28 |
+
self.config = config or OmegaConf.create()
|
| 29 |
+
if not type(self.config)==dict:
|
| 30 |
+
self.config = OmegaConf.to_container(self.config)
|
| 31 |
+
self.keep_orig_class_label = self.config.get("keep_orig_class_label", False)
|
| 32 |
+
self.process_images = True # if False we skip loading & processing images and self.data contains filepaths
|
| 33 |
+
self._prepare()
|
| 34 |
+
self._prepare_synset_to_human()
|
| 35 |
+
self._prepare_idx_to_synset()
|
| 36 |
+
self._prepare_human_to_integer_label()
|
| 37 |
+
self._load()
|
| 38 |
+
|
| 39 |
+
def __len__(self):
|
| 40 |
+
return len(self.data)
|
| 41 |
+
|
| 42 |
+
def __getitem__(self, i):
|
| 43 |
+
return self.data[i]
|
| 44 |
+
|
| 45 |
+
def _prepare(self):
|
| 46 |
+
raise NotImplementedError()
|
| 47 |
+
|
| 48 |
+
def _filter_relpaths(self, relpaths):
|
| 49 |
+
ignore = set([
|
| 50 |
+
"n06596364_9591.JPEG",
|
| 51 |
+
])
|
| 52 |
+
relpaths = [rpath for rpath in relpaths if not rpath.split("/")[-1] in ignore]
|
| 53 |
+
if "sub_indices" in self.config:
|
| 54 |
+
indices = str_to_indices(self.config["sub_indices"])
|
| 55 |
+
synsets = give_synsets_from_indices(indices, path_to_yaml=self.idx2syn) # returns a list of strings
|
| 56 |
+
self.synset2idx = synset2idx(path_to_yaml=self.idx2syn)
|
| 57 |
+
files = []
|
| 58 |
+
for rpath in relpaths:
|
| 59 |
+
syn = rpath.split("/")[0]
|
| 60 |
+
if syn in synsets:
|
| 61 |
+
files.append(rpath)
|
| 62 |
+
return files
|
| 63 |
+
else:
|
| 64 |
+
return relpaths
|
| 65 |
+
|
| 66 |
+
def _prepare_synset_to_human(self):
|
| 67 |
+
SIZE = 2655750
|
| 68 |
+
URL = "https://heibox.uni-heidelberg.de/f/9f28e956cd304264bb82/?dl=1"
|
| 69 |
+
self.human_dict = os.path.join(self.root, "synset_human.txt")
|
| 70 |
+
if (not os.path.exists(self.human_dict) or
|
| 71 |
+
not os.path.getsize(self.human_dict)==SIZE):
|
| 72 |
+
download(URL, self.human_dict)
|
| 73 |
+
|
| 74 |
+
def _prepare_idx_to_synset(self):
|
| 75 |
+
URL = "https://heibox.uni-heidelberg.de/f/d835d5b6ceda4d3aa910/?dl=1"
|
| 76 |
+
self.idx2syn = os.path.join(self.root, "index_synset.yaml")
|
| 77 |
+
if (not os.path.exists(self.idx2syn)):
|
| 78 |
+
download(URL, self.idx2syn)
|
| 79 |
+
|
| 80 |
+
def _prepare_human_to_integer_label(self):
|
| 81 |
+
URL = "https://heibox.uni-heidelberg.de/f/2362b797d5be43b883f6/?dl=1"
|
| 82 |
+
self.human2integer = os.path.join(self.root, "imagenet1000_clsidx_to_labels.txt")
|
| 83 |
+
if (not os.path.exists(self.human2integer)):
|
| 84 |
+
download(URL, self.human2integer)
|
| 85 |
+
with open(self.human2integer, "r") as f:
|
| 86 |
+
lines = f.read().splitlines()
|
| 87 |
+
assert len(lines) == 1000
|
| 88 |
+
self.human2integer_dict = dict()
|
| 89 |
+
for line in lines:
|
| 90 |
+
value, key = line.split(":")
|
| 91 |
+
self.human2integer_dict[key] = int(value)
|
| 92 |
+
|
| 93 |
+
def _load(self):
|
| 94 |
+
with open(self.txt_filelist, "r") as f:
|
| 95 |
+
self.relpaths = f.read().splitlines()
|
| 96 |
+
l1 = len(self.relpaths)
|
| 97 |
+
self.relpaths = self._filter_relpaths(self.relpaths)
|
| 98 |
+
print("Removed {} files from filelist during filtering.".format(l1 - len(self.relpaths)))
|
| 99 |
+
|
| 100 |
+
self.synsets = [p.split("/")[0] for p in self.relpaths]
|
| 101 |
+
self.abspaths = [os.path.join(self.datadir, p) for p in self.relpaths]
|
| 102 |
+
|
| 103 |
+
unique_synsets = np.unique(self.synsets)
|
| 104 |
+
class_dict = dict((synset, i) for i, synset in enumerate(unique_synsets))
|
| 105 |
+
if not self.keep_orig_class_label:
|
| 106 |
+
self.class_labels = [class_dict[s] for s in self.synsets]
|
| 107 |
+
else:
|
| 108 |
+
self.class_labels = [self.synset2idx[s] for s in self.synsets]
|
| 109 |
+
|
| 110 |
+
with open(self.human_dict, "r") as f:
|
| 111 |
+
human_dict = f.read().splitlines()
|
| 112 |
+
human_dict = dict(line.split(maxsplit=1) for line in human_dict)
|
| 113 |
+
|
| 114 |
+
self.human_labels = [human_dict[s] for s in self.synsets]
|
| 115 |
+
|
| 116 |
+
labels = {
|
| 117 |
+
"relpath": np.array(self.relpaths),
|
| 118 |
+
"synsets": np.array(self.synsets),
|
| 119 |
+
"class_label": np.array(self.class_labels),
|
| 120 |
+
"human_label": np.array(self.human_labels),
|
| 121 |
+
}
|
| 122 |
+
|
| 123 |
+
if self.process_images:
|
| 124 |
+
self.size = retrieve(self.config, "size", default=256)
|
| 125 |
+
self.data = ImagePaths(self.abspaths,
|
| 126 |
+
labels=labels,
|
| 127 |
+
size=self.size,
|
| 128 |
+
random_crop=self.random_crop,
|
| 129 |
+
)
|
| 130 |
+
else:
|
| 131 |
+
self.data = self.abspaths
|
| 132 |
+
|
| 133 |
+
|
| 134 |
+
class ImageNetTrain(ImageNetBase):
|
| 135 |
+
NAME = "ILSVRC2012_train"
|
| 136 |
+
URL = "http://www.image-net.org/challenges/LSVRC/2012/"
|
| 137 |
+
AT_HASH = "a306397ccf9c2ead27155983c254227c0fd938e2"
|
| 138 |
+
FILES = [
|
| 139 |
+
"ILSVRC2012_img_train.tar",
|
| 140 |
+
]
|
| 141 |
+
SIZES = [
|
| 142 |
+
147897477120,
|
| 143 |
+
]
|
| 144 |
+
|
| 145 |
+
def __init__(self, process_images=True, data_root=None, **kwargs):
|
| 146 |
+
self.process_images = process_images
|
| 147 |
+
self.data_root = data_root
|
| 148 |
+
super().__init__(**kwargs)
|
| 149 |
+
|
| 150 |
+
def _prepare(self):
|
| 151 |
+
if self.data_root:
|
| 152 |
+
self.root = os.path.join(self.data_root, self.NAME)
|
| 153 |
+
else:
|
| 154 |
+
cachedir = os.environ.get("XDG_CACHE_HOME", os.path.expanduser("~/.cache"))
|
| 155 |
+
self.root = os.path.join(cachedir, "autoencoders/data", self.NAME)
|
| 156 |
+
|
| 157 |
+
self.datadir = os.path.join(self.root, "data")
|
| 158 |
+
self.txt_filelist = os.path.join(self.root, "filelist.txt")
|
| 159 |
+
self.expected_length = 1281167
|
| 160 |
+
self.random_crop = retrieve(self.config, "ImageNetTrain/random_crop",
|
| 161 |
+
default=True)
|
| 162 |
+
if not tdu.is_prepared(self.root):
|
| 163 |
+
# prep
|
| 164 |
+
print("Preparing dataset {} in {}".format(self.NAME, self.root))
|
| 165 |
+
|
| 166 |
+
datadir = self.datadir
|
| 167 |
+
if not os.path.exists(datadir):
|
| 168 |
+
path = os.path.join(self.root, self.FILES[0])
|
| 169 |
+
if not os.path.exists(path) or not os.path.getsize(path)==self.SIZES[0]:
|
| 170 |
+
import academictorrents as at
|
| 171 |
+
atpath = at.get(self.AT_HASH, datastore=self.root)
|
| 172 |
+
assert atpath == path
|
| 173 |
+
|
| 174 |
+
print("Extracting {} to {}".format(path, datadir))
|
| 175 |
+
os.makedirs(datadir, exist_ok=True)
|
| 176 |
+
with tarfile.open(path, "r:") as tar:
|
| 177 |
+
tar.extractall(path=datadir)
|
| 178 |
+
|
| 179 |
+
print("Extracting sub-tars.")
|
| 180 |
+
subpaths = sorted(glob.glob(os.path.join(datadir, "*.tar")))
|
| 181 |
+
for subpath in tqdm(subpaths):
|
| 182 |
+
subdir = subpath[:-len(".tar")]
|
| 183 |
+
os.makedirs(subdir, exist_ok=True)
|
| 184 |
+
with tarfile.open(subpath, "r:") as tar:
|
| 185 |
+
tar.extractall(path=subdir)
|
| 186 |
+
|
| 187 |
+
filelist = glob.glob(os.path.join(datadir, "**", "*.JPEG"))
|
| 188 |
+
filelist = [os.path.relpath(p, start=datadir) for p in filelist]
|
| 189 |
+
filelist = sorted(filelist)
|
| 190 |
+
filelist = "\n".join(filelist)+"\n"
|
| 191 |
+
with open(self.txt_filelist, "w") as f:
|
| 192 |
+
f.write(filelist)
|
| 193 |
+
|
| 194 |
+
tdu.mark_prepared(self.root)
|
| 195 |
+
|
| 196 |
+
|
| 197 |
+
class ImageNetValidation(ImageNetBase):
|
| 198 |
+
NAME = "ILSVRC2012_validation"
|
| 199 |
+
URL = "http://www.image-net.org/challenges/LSVRC/2012/"
|
| 200 |
+
AT_HASH = "5d6d0df7ed81efd49ca99ea4737e0ae5e3a5f2e5"
|
| 201 |
+
VS_URL = "https://heibox.uni-heidelberg.de/f/3e0f6e9c624e45f2bd73/?dl=1"
|
| 202 |
+
FILES = [
|
| 203 |
+
"ILSVRC2012_img_val.tar",
|
| 204 |
+
"validation_synset.txt",
|
| 205 |
+
]
|
| 206 |
+
SIZES = [
|
| 207 |
+
6744924160,
|
| 208 |
+
1950000,
|
| 209 |
+
]
|
| 210 |
+
|
| 211 |
+
def __init__(self, process_images=True, data_root=None, **kwargs):
|
| 212 |
+
self.data_root = data_root
|
| 213 |
+
self.process_images = process_images
|
| 214 |
+
super().__init__(**kwargs)
|
| 215 |
+
|
| 216 |
+
def _prepare(self):
|
| 217 |
+
if self.data_root:
|
| 218 |
+
self.root = os.path.join(self.data_root, self.NAME)
|
| 219 |
+
else:
|
| 220 |
+
cachedir = os.environ.get("XDG_CACHE_HOME", os.path.expanduser("~/.cache"))
|
| 221 |
+
self.root = os.path.join(cachedir, "autoencoders/data", self.NAME)
|
| 222 |
+
self.datadir = os.path.join(self.root, "data")
|
| 223 |
+
self.txt_filelist = os.path.join(self.root, "filelist.txt")
|
| 224 |
+
self.expected_length = 50000
|
| 225 |
+
self.random_crop = retrieve(self.config, "ImageNetValidation/random_crop",
|
| 226 |
+
default=False)
|
| 227 |
+
if not tdu.is_prepared(self.root):
|
| 228 |
+
# prep
|
| 229 |
+
print("Preparing dataset {} in {}".format(self.NAME, self.root))
|
| 230 |
+
|
| 231 |
+
datadir = self.datadir
|
| 232 |
+
if not os.path.exists(datadir):
|
| 233 |
+
path = os.path.join(self.root, self.FILES[0])
|
| 234 |
+
if not os.path.exists(path) or not os.path.getsize(path)==self.SIZES[0]:
|
| 235 |
+
import academictorrents as at
|
| 236 |
+
atpath = at.get(self.AT_HASH, datastore=self.root)
|
| 237 |
+
assert atpath == path
|
| 238 |
+
|
| 239 |
+
print("Extracting {} to {}".format(path, datadir))
|
| 240 |
+
os.makedirs(datadir, exist_ok=True)
|
| 241 |
+
with tarfile.open(path, "r:") as tar:
|
| 242 |
+
tar.extractall(path=datadir)
|
| 243 |
+
|
| 244 |
+
vspath = os.path.join(self.root, self.FILES[1])
|
| 245 |
+
if not os.path.exists(vspath) or not os.path.getsize(vspath)==self.SIZES[1]:
|
| 246 |
+
download(self.VS_URL, vspath)
|
| 247 |
+
|
| 248 |
+
with open(vspath, "r") as f:
|
| 249 |
+
synset_dict = f.read().splitlines()
|
| 250 |
+
synset_dict = dict(line.split() for line in synset_dict)
|
| 251 |
+
|
| 252 |
+
print("Reorganizing into synset folders")
|
| 253 |
+
synsets = np.unique(list(synset_dict.values()))
|
| 254 |
+
for s in synsets:
|
| 255 |
+
os.makedirs(os.path.join(datadir, s), exist_ok=True)
|
| 256 |
+
for k, v in synset_dict.items():
|
| 257 |
+
src = os.path.join(datadir, k)
|
| 258 |
+
dst = os.path.join(datadir, v)
|
| 259 |
+
shutil.move(src, dst)
|
| 260 |
+
|
| 261 |
+
filelist = glob.glob(os.path.join(datadir, "**", "*.JPEG"))
|
| 262 |
+
filelist = [os.path.relpath(p, start=datadir) for p in filelist]
|
| 263 |
+
filelist = sorted(filelist)
|
| 264 |
+
filelist = "\n".join(filelist)+"\n"
|
| 265 |
+
with open(self.txt_filelist, "w") as f:
|
| 266 |
+
f.write(filelist)
|
| 267 |
+
|
| 268 |
+
tdu.mark_prepared(self.root)
|
| 269 |
+
|
| 270 |
+
|
| 271 |
+
|
| 272 |
+
class ImageNetSR(Dataset):
|
| 273 |
+
def __init__(self, size=None,
|
| 274 |
+
degradation=None, downscale_f=4, min_crop_f=0.5, max_crop_f=1.,
|
| 275 |
+
random_crop=True):
|
| 276 |
+
"""
|
| 277 |
+
Imagenet Superresolution Dataloader
|
| 278 |
+
Performs following ops in order:
|
| 279 |
+
1. crops a crop of size s from image either as random or center crop
|
| 280 |
+
2. resizes crop to size with cv2.area_interpolation
|
| 281 |
+
3. degrades resized crop with degradation_fn
|
| 282 |
+
|
| 283 |
+
:param size: resizing to size after cropping
|
| 284 |
+
:param degradation: degradation_fn, e.g. cv_bicubic or bsrgan_light
|
| 285 |
+
:param downscale_f: Low Resolution Downsample factor
|
| 286 |
+
:param min_crop_f: determines crop size s,
|
| 287 |
+
where s = c * min_img_side_len with c sampled from interval (min_crop_f, max_crop_f)
|
| 288 |
+
:param max_crop_f: ""
|
| 289 |
+
:param data_root:
|
| 290 |
+
:param random_crop:
|
| 291 |
+
"""
|
| 292 |
+
self.base = self.get_base()
|
| 293 |
+
assert size
|
| 294 |
+
assert (size / downscale_f).is_integer()
|
| 295 |
+
self.size = size
|
| 296 |
+
self.LR_size = int(size / downscale_f)
|
| 297 |
+
self.min_crop_f = min_crop_f
|
| 298 |
+
self.max_crop_f = max_crop_f
|
| 299 |
+
assert(max_crop_f <= 1.)
|
| 300 |
+
self.center_crop = not random_crop
|
| 301 |
+
|
| 302 |
+
self.image_rescaler = albumentations.SmallestMaxSize(max_size=size, interpolation=cv2.INTER_AREA)
|
| 303 |
+
|
| 304 |
+
self.pil_interpolation = False # gets reset later if incase interp_op is from pillow
|
| 305 |
+
|
| 306 |
+
if degradation == "bsrgan":
|
| 307 |
+
self.degradation_process = partial(degradation_fn_bsr, sf=downscale_f)
|
| 308 |
+
|
| 309 |
+
elif degradation == "bsrgan_light":
|
| 310 |
+
self.degradation_process = partial(degradation_fn_bsr_light, sf=downscale_f)
|
| 311 |
+
|
| 312 |
+
else:
|
| 313 |
+
interpolation_fn = {
|
| 314 |
+
"cv_nearest": cv2.INTER_NEAREST,
|
| 315 |
+
"cv_bilinear": cv2.INTER_LINEAR,
|
| 316 |
+
"cv_bicubic": cv2.INTER_CUBIC,
|
| 317 |
+
"cv_area": cv2.INTER_AREA,
|
| 318 |
+
"cv_lanczos": cv2.INTER_LANCZOS4,
|
| 319 |
+
"pil_nearest": PIL.Image.NEAREST,
|
| 320 |
+
"pil_bilinear": PIL.Image.BILINEAR,
|
| 321 |
+
"pil_bicubic": PIL.Image.BICUBIC,
|
| 322 |
+
"pil_box": PIL.Image.BOX,
|
| 323 |
+
"pil_hamming": PIL.Image.HAMMING,
|
| 324 |
+
"pil_lanczos": PIL.Image.LANCZOS,
|
| 325 |
+
}[degradation]
|
| 326 |
+
|
| 327 |
+
self.pil_interpolation = degradation.startswith("pil_")
|
| 328 |
+
|
| 329 |
+
if self.pil_interpolation:
|
| 330 |
+
self.degradation_process = partial(TF.resize, size=self.LR_size, interpolation=interpolation_fn)
|
| 331 |
+
|
| 332 |
+
else:
|
| 333 |
+
self.degradation_process = albumentations.SmallestMaxSize(max_size=self.LR_size,
|
| 334 |
+
interpolation=interpolation_fn)
|
| 335 |
+
|
| 336 |
+
def __len__(self):
|
| 337 |
+
return len(self.base)
|
| 338 |
+
|
| 339 |
+
def __getitem__(self, i):
|
| 340 |
+
example = self.base[i]
|
| 341 |
+
image = Image.open(example["file_path_"])
|
| 342 |
+
|
| 343 |
+
if not image.mode == "RGB":
|
| 344 |
+
image = image.convert("RGB")
|
| 345 |
+
|
| 346 |
+
image = np.array(image).astype(np.uint8)
|
| 347 |
+
|
| 348 |
+
min_side_len = min(image.shape[:2])
|
| 349 |
+
crop_side_len = min_side_len * np.random.uniform(self.min_crop_f, self.max_crop_f, size=None)
|
| 350 |
+
crop_side_len = int(crop_side_len)
|
| 351 |
+
|
| 352 |
+
if self.center_crop:
|
| 353 |
+
self.cropper = albumentations.CenterCrop(height=crop_side_len, width=crop_side_len)
|
| 354 |
+
|
| 355 |
+
else:
|
| 356 |
+
self.cropper = albumentations.RandomCrop(height=crop_side_len, width=crop_side_len)
|
| 357 |
+
|
| 358 |
+
image = self.cropper(image=image)["image"]
|
| 359 |
+
image = self.image_rescaler(image=image)["image"]
|
| 360 |
+
|
| 361 |
+
if self.pil_interpolation:
|
| 362 |
+
image_pil = PIL.Image.fromarray(image)
|
| 363 |
+
LR_image = self.degradation_process(image_pil)
|
| 364 |
+
LR_image = np.array(LR_image).astype(np.uint8)
|
| 365 |
+
|
| 366 |
+
else:
|
| 367 |
+
LR_image = self.degradation_process(image=image)["image"]
|
| 368 |
+
|
| 369 |
+
example["image"] = (image/127.5 - 1.0).astype(np.float32)
|
| 370 |
+
example["LR_image"] = (LR_image/127.5 - 1.0).astype(np.float32)
|
| 371 |
+
|
| 372 |
+
return example
|
| 373 |
+
|
| 374 |
+
|
| 375 |
+
class ImageNetSRTrain(ImageNetSR):
|
| 376 |
+
def __init__(self, **kwargs):
|
| 377 |
+
super().__init__(**kwargs)
|
| 378 |
+
|
| 379 |
+
def get_base(self):
|
| 380 |
+
with open("data/imagenet_train_hr_indices.p", "rb") as f:
|
| 381 |
+
indices = pickle.load(f)
|
| 382 |
+
dset = ImageNetTrain(process_images=False,)
|
| 383 |
+
return Subset(dset, indices)
|
| 384 |
+
|
| 385 |
+
|
| 386 |
+
class ImageNetSRValidation(ImageNetSR):
|
| 387 |
+
def __init__(self, **kwargs):
|
| 388 |
+
super().__init__(**kwargs)
|
| 389 |
+
|
| 390 |
+
def get_base(self):
|
| 391 |
+
with open("data/imagenet_val_hr_indices.p", "rb") as f:
|
| 392 |
+
indices = pickle.load(f)
|
| 393 |
+
dset = ImageNetValidation(process_images=False,)
|
| 394 |
+
return Subset(dset, indices)
|
ldm/data/lsun.py
ADDED
|
@@ -0,0 +1,92 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import os
|
| 2 |
+
import numpy as np
|
| 3 |
+
import PIL
|
| 4 |
+
from PIL import Image
|
| 5 |
+
from torch.utils.data import Dataset
|
| 6 |
+
from torchvision import transforms
|
| 7 |
+
|
| 8 |
+
|
| 9 |
+
class LSUNBase(Dataset):
|
| 10 |
+
def __init__(self,
|
| 11 |
+
txt_file,
|
| 12 |
+
data_root,
|
| 13 |
+
size=None,
|
| 14 |
+
interpolation="bicubic",
|
| 15 |
+
flip_p=0.5
|
| 16 |
+
):
|
| 17 |
+
self.data_paths = txt_file
|
| 18 |
+
self.data_root = data_root
|
| 19 |
+
with open(self.data_paths, "r") as f:
|
| 20 |
+
self.image_paths = f.read().splitlines()
|
| 21 |
+
self._length = len(self.image_paths)
|
| 22 |
+
self.labels = {
|
| 23 |
+
"relative_file_path_": [l for l in self.image_paths],
|
| 24 |
+
"file_path_": [os.path.join(self.data_root, l)
|
| 25 |
+
for l in self.image_paths],
|
| 26 |
+
}
|
| 27 |
+
|
| 28 |
+
self.size = size
|
| 29 |
+
self.interpolation = {"linear": PIL.Image.LINEAR,
|
| 30 |
+
"bilinear": PIL.Image.BILINEAR,
|
| 31 |
+
"bicubic": PIL.Image.BICUBIC,
|
| 32 |
+
"lanczos": PIL.Image.LANCZOS,
|
| 33 |
+
}[interpolation]
|
| 34 |
+
self.flip = transforms.RandomHorizontalFlip(p=flip_p)
|
| 35 |
+
|
| 36 |
+
def __len__(self):
|
| 37 |
+
return self._length
|
| 38 |
+
|
| 39 |
+
def __getitem__(self, i):
|
| 40 |
+
example = dict((k, self.labels[k][i]) for k in self.labels)
|
| 41 |
+
image = Image.open(example["file_path_"])
|
| 42 |
+
if not image.mode == "RGB":
|
| 43 |
+
image = image.convert("RGB")
|
| 44 |
+
|
| 45 |
+
# default to score-sde preprocessing
|
| 46 |
+
img = np.array(image).astype(np.uint8)
|
| 47 |
+
crop = min(img.shape[0], img.shape[1])
|
| 48 |
+
h, w, = img.shape[0], img.shape[1]
|
| 49 |
+
img = img[(h - crop) // 2:(h + crop) // 2,
|
| 50 |
+
(w - crop) // 2:(w + crop) // 2]
|
| 51 |
+
|
| 52 |
+
image = Image.fromarray(img)
|
| 53 |
+
if self.size is not None:
|
| 54 |
+
image = image.resize((self.size, self.size), resample=self.interpolation)
|
| 55 |
+
|
| 56 |
+
image = self.flip(image)
|
| 57 |
+
image = np.array(image).astype(np.uint8)
|
| 58 |
+
example["image"] = (image / 127.5 - 1.0).astype(np.float32)
|
| 59 |
+
return example
|
| 60 |
+
|
| 61 |
+
|
| 62 |
+
class LSUNChurchesTrain(LSUNBase):
|
| 63 |
+
def __init__(self, **kwargs):
|
| 64 |
+
super().__init__(txt_file="data/lsun/church_outdoor_train.txt", data_root="data/lsun/churches", **kwargs)
|
| 65 |
+
|
| 66 |
+
|
| 67 |
+
class LSUNChurchesValidation(LSUNBase):
|
| 68 |
+
def __init__(self, flip_p=0., **kwargs):
|
| 69 |
+
super().__init__(txt_file="data/lsun/church_outdoor_val.txt", data_root="data/lsun/churches",
|
| 70 |
+
flip_p=flip_p, **kwargs)
|
| 71 |
+
|
| 72 |
+
|
| 73 |
+
class LSUNBedroomsTrain(LSUNBase):
|
| 74 |
+
def __init__(self, **kwargs):
|
| 75 |
+
super().__init__(txt_file="data/lsun/bedrooms_train.txt", data_root="data/lsun/bedrooms", **kwargs)
|
| 76 |
+
|
| 77 |
+
|
| 78 |
+
class LSUNBedroomsValidation(LSUNBase):
|
| 79 |
+
def __init__(self, flip_p=0.0, **kwargs):
|
| 80 |
+
super().__init__(txt_file="data/lsun/bedrooms_val.txt", data_root="data/lsun/bedrooms",
|
| 81 |
+
flip_p=flip_p, **kwargs)
|
| 82 |
+
|
| 83 |
+
|
| 84 |
+
class LSUNCatsTrain(LSUNBase):
|
| 85 |
+
def __init__(self, **kwargs):
|
| 86 |
+
super().__init__(txt_file="data/lsun/cat_train.txt", data_root="data/lsun/cats", **kwargs)
|
| 87 |
+
|
| 88 |
+
|
| 89 |
+
class LSUNCatsValidation(LSUNBase):
|
| 90 |
+
def __init__(self, flip_p=0., **kwargs):
|
| 91 |
+
super().__init__(txt_file="data/lsun/cat_val.txt", data_root="data/lsun/cats",
|
| 92 |
+
flip_p=flip_p, **kwargs)
|
ldm/lr_scheduler.py
ADDED
|
@@ -0,0 +1,98 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import numpy as np
|
| 2 |
+
|
| 3 |
+
|
| 4 |
+
class LambdaWarmUpCosineScheduler:
|
| 5 |
+
"""
|
| 6 |
+
note: use with a base_lr of 1.0
|
| 7 |
+
"""
|
| 8 |
+
def __init__(self, warm_up_steps, lr_min, lr_max, lr_start, max_decay_steps, verbosity_interval=0):
|
| 9 |
+
self.lr_warm_up_steps = warm_up_steps
|
| 10 |
+
self.lr_start = lr_start
|
| 11 |
+
self.lr_min = lr_min
|
| 12 |
+
self.lr_max = lr_max
|
| 13 |
+
self.lr_max_decay_steps = max_decay_steps
|
| 14 |
+
self.last_lr = 0.
|
| 15 |
+
self.verbosity_interval = verbosity_interval
|
| 16 |
+
|
| 17 |
+
def schedule(self, n, **kwargs):
|
| 18 |
+
if self.verbosity_interval > 0:
|
| 19 |
+
if n % self.verbosity_interval == 0: print(f"current step: {n}, recent lr-multiplier: {self.last_lr}")
|
| 20 |
+
if n < self.lr_warm_up_steps:
|
| 21 |
+
lr = (self.lr_max - self.lr_start) / self.lr_warm_up_steps * n + self.lr_start
|
| 22 |
+
self.last_lr = lr
|
| 23 |
+
return lr
|
| 24 |
+
else:
|
| 25 |
+
t = (n - self.lr_warm_up_steps) / (self.lr_max_decay_steps - self.lr_warm_up_steps)
|
| 26 |
+
t = min(t, 1.0)
|
| 27 |
+
lr = self.lr_min + 0.5 * (self.lr_max - self.lr_min) * (
|
| 28 |
+
1 + np.cos(t * np.pi))
|
| 29 |
+
self.last_lr = lr
|
| 30 |
+
return lr
|
| 31 |
+
|
| 32 |
+
def __call__(self, n, **kwargs):
|
| 33 |
+
return self.schedule(n,**kwargs)
|
| 34 |
+
|
| 35 |
+
|
| 36 |
+
class LambdaWarmUpCosineScheduler2:
|
| 37 |
+
"""
|
| 38 |
+
supports repeated iterations, configurable via lists
|
| 39 |
+
note: use with a base_lr of 1.0.
|
| 40 |
+
"""
|
| 41 |
+
def __init__(self, warm_up_steps, f_min, f_max, f_start, cycle_lengths, verbosity_interval=0):
|
| 42 |
+
assert len(warm_up_steps) == len(f_min) == len(f_max) == len(f_start) == len(cycle_lengths)
|
| 43 |
+
self.lr_warm_up_steps = warm_up_steps
|
| 44 |
+
self.f_start = f_start
|
| 45 |
+
self.f_min = f_min
|
| 46 |
+
self.f_max = f_max
|
| 47 |
+
self.cycle_lengths = cycle_lengths
|
| 48 |
+
self.cum_cycles = np.cumsum([0] + list(self.cycle_lengths))
|
| 49 |
+
self.last_f = 0.
|
| 50 |
+
self.verbosity_interval = verbosity_interval
|
| 51 |
+
|
| 52 |
+
def find_in_interval(self, n):
|
| 53 |
+
interval = 0
|
| 54 |
+
for cl in self.cum_cycles[1:]:
|
| 55 |
+
if n <= cl:
|
| 56 |
+
return interval
|
| 57 |
+
interval += 1
|
| 58 |
+
|
| 59 |
+
def schedule(self, n, **kwargs):
|
| 60 |
+
cycle = self.find_in_interval(n)
|
| 61 |
+
n = n - self.cum_cycles[cycle]
|
| 62 |
+
if self.verbosity_interval > 0:
|
| 63 |
+
if n % self.verbosity_interval == 0: print(f"current step: {n}, recent lr-multiplier: {self.last_f}, "
|
| 64 |
+
f"current cycle {cycle}")
|
| 65 |
+
if n < self.lr_warm_up_steps[cycle]:
|
| 66 |
+
f = (self.f_max[cycle] - self.f_start[cycle]) / self.lr_warm_up_steps[cycle] * n + self.f_start[cycle]
|
| 67 |
+
self.last_f = f
|
| 68 |
+
return f
|
| 69 |
+
else:
|
| 70 |
+
t = (n - self.lr_warm_up_steps[cycle]) / (self.cycle_lengths[cycle] - self.lr_warm_up_steps[cycle])
|
| 71 |
+
t = min(t, 1.0)
|
| 72 |
+
f = self.f_min[cycle] + 0.5 * (self.f_max[cycle] - self.f_min[cycle]) * (
|
| 73 |
+
1 + np.cos(t * np.pi))
|
| 74 |
+
self.last_f = f
|
| 75 |
+
return f
|
| 76 |
+
|
| 77 |
+
def __call__(self, n, **kwargs):
|
| 78 |
+
return self.schedule(n, **kwargs)
|
| 79 |
+
|
| 80 |
+
|
| 81 |
+
class LambdaLinearScheduler(LambdaWarmUpCosineScheduler2):
|
| 82 |
+
|
| 83 |
+
def schedule(self, n, **kwargs):
|
| 84 |
+
cycle = self.find_in_interval(n)
|
| 85 |
+
n = n - self.cum_cycles[cycle]
|
| 86 |
+
if self.verbosity_interval > 0:
|
| 87 |
+
if n % self.verbosity_interval == 0: print(f"current step: {n}, recent lr-multiplier: {self.last_f}, "
|
| 88 |
+
f"current cycle {cycle}")
|
| 89 |
+
|
| 90 |
+
if n < self.lr_warm_up_steps[cycle]:
|
| 91 |
+
f = (self.f_max[cycle] - self.f_start[cycle]) / self.lr_warm_up_steps[cycle] * n + self.f_start[cycle]
|
| 92 |
+
self.last_f = f
|
| 93 |
+
return f
|
| 94 |
+
else:
|
| 95 |
+
f = self.f_min[cycle] + (self.f_max[cycle] - self.f_min[cycle]) * (self.cycle_lengths[cycle] - n) / (self.cycle_lengths[cycle])
|
| 96 |
+
self.last_f = f
|
| 97 |
+
return f
|
| 98 |
+
|
ldm/models/autoencoder.py
ADDED
|
@@ -0,0 +1,443 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import torch
|
| 2 |
+
import pytorch_lightning as pl
|
| 3 |
+
import torch.nn.functional as F
|
| 4 |
+
from contextlib import contextmanager
|
| 5 |
+
|
| 6 |
+
from taming.modules.vqvae.quantize import VectorQuantizer2 as VectorQuantizer
|
| 7 |
+
|
| 8 |
+
from ldm.modules.diffusionmodules.model import Encoder, Decoder
|
| 9 |
+
from ldm.modules.distributions.distributions import DiagonalGaussianDistribution
|
| 10 |
+
|
| 11 |
+
from ldm.util import instantiate_from_config
|
| 12 |
+
|
| 13 |
+
|
| 14 |
+
class VQModel(pl.LightningModule):
|
| 15 |
+
def __init__(self,
|
| 16 |
+
ddconfig,
|
| 17 |
+
lossconfig,
|
| 18 |
+
n_embed,
|
| 19 |
+
embed_dim,
|
| 20 |
+
ckpt_path=None,
|
| 21 |
+
ignore_keys=[],
|
| 22 |
+
image_key="image",
|
| 23 |
+
colorize_nlabels=None,
|
| 24 |
+
monitor=None,
|
| 25 |
+
batch_resize_range=None,
|
| 26 |
+
scheduler_config=None,
|
| 27 |
+
lr_g_factor=1.0,
|
| 28 |
+
remap=None,
|
| 29 |
+
sane_index_shape=False, # tell vector quantizer to return indices as bhw
|
| 30 |
+
use_ema=False
|
| 31 |
+
):
|
| 32 |
+
super().__init__()
|
| 33 |
+
self.embed_dim = embed_dim
|
| 34 |
+
self.n_embed = n_embed
|
| 35 |
+
self.image_key = image_key
|
| 36 |
+
self.encoder = Encoder(**ddconfig)
|
| 37 |
+
self.decoder = Decoder(**ddconfig)
|
| 38 |
+
self.loss = instantiate_from_config(lossconfig)
|
| 39 |
+
self.quantize = VectorQuantizer(n_embed, embed_dim, beta=0.25,
|
| 40 |
+
remap=remap,
|
| 41 |
+
sane_index_shape=sane_index_shape)
|
| 42 |
+
self.quant_conv = torch.nn.Conv2d(ddconfig["z_channels"], embed_dim, 1)
|
| 43 |
+
self.post_quant_conv = torch.nn.Conv2d(embed_dim, ddconfig["z_channels"], 1)
|
| 44 |
+
if colorize_nlabels is not None:
|
| 45 |
+
assert type(colorize_nlabels)==int
|
| 46 |
+
self.register_buffer("colorize", torch.randn(3, colorize_nlabels, 1, 1))
|
| 47 |
+
if monitor is not None:
|
| 48 |
+
self.monitor = monitor
|
| 49 |
+
self.batch_resize_range = batch_resize_range
|
| 50 |
+
if self.batch_resize_range is not None:
|
| 51 |
+
print(f"{self.__class__.__name__}: Using per-batch resizing in range {batch_resize_range}.")
|
| 52 |
+
|
| 53 |
+
self.use_ema = use_ema
|
| 54 |
+
if self.use_ema:
|
| 55 |
+
self.model_ema = LitEma(self)
|
| 56 |
+
print(f"Keeping EMAs of {len(list(self.model_ema.buffers()))}.")
|
| 57 |
+
|
| 58 |
+
if ckpt_path is not None:
|
| 59 |
+
self.init_from_ckpt(ckpt_path, ignore_keys=ignore_keys)
|
| 60 |
+
self.scheduler_config = scheduler_config
|
| 61 |
+
self.lr_g_factor = lr_g_factor
|
| 62 |
+
|
| 63 |
+
@contextmanager
|
| 64 |
+
def ema_scope(self, context=None):
|
| 65 |
+
if self.use_ema:
|
| 66 |
+
self.model_ema.store(self.parameters())
|
| 67 |
+
self.model_ema.copy_to(self)
|
| 68 |
+
if context is not None:
|
| 69 |
+
print(f"{context}: Switched to EMA weights")
|
| 70 |
+
try:
|
| 71 |
+
yield None
|
| 72 |
+
finally:
|
| 73 |
+
if self.use_ema:
|
| 74 |
+
self.model_ema.restore(self.parameters())
|
| 75 |
+
if context is not None:
|
| 76 |
+
print(f"{context}: Restored training weights")
|
| 77 |
+
|
| 78 |
+
def init_from_ckpt(self, path, ignore_keys=list()):
|
| 79 |
+
sd = torch.load(path, map_location="cpu")["state_dict"]
|
| 80 |
+
keys = list(sd.keys())
|
| 81 |
+
for k in keys:
|
| 82 |
+
for ik in ignore_keys:
|
| 83 |
+
if k.startswith(ik):
|
| 84 |
+
print("Deleting key {} from state_dict.".format(k))
|
| 85 |
+
del sd[k]
|
| 86 |
+
missing, unexpected = self.load_state_dict(sd, strict=False)
|
| 87 |
+
print(f"Restored from {path} with {len(missing)} missing and {len(unexpected)} unexpected keys")
|
| 88 |
+
if len(missing) > 0:
|
| 89 |
+
print(f"Missing Keys: {missing}")
|
| 90 |
+
print(f"Unexpected Keys: {unexpected}")
|
| 91 |
+
|
| 92 |
+
def on_train_batch_end(self, *args, **kwargs):
|
| 93 |
+
if self.use_ema:
|
| 94 |
+
self.model_ema(self)
|
| 95 |
+
|
| 96 |
+
def encode(self, x):
|
| 97 |
+
h = self.encoder(x)
|
| 98 |
+
h = self.quant_conv(h)
|
| 99 |
+
quant, emb_loss, info = self.quantize(h)
|
| 100 |
+
return quant, emb_loss, info
|
| 101 |
+
|
| 102 |
+
def encode_to_prequant(self, x):
|
| 103 |
+
h = self.encoder(x)
|
| 104 |
+
h = self.quant_conv(h)
|
| 105 |
+
return h
|
| 106 |
+
|
| 107 |
+
def decode(self, quant):
|
| 108 |
+
quant = self.post_quant_conv(quant)
|
| 109 |
+
dec = self.decoder(quant)
|
| 110 |
+
return dec
|
| 111 |
+
|
| 112 |
+
def decode_code(self, code_b):
|
| 113 |
+
quant_b = self.quantize.embed_code(code_b)
|
| 114 |
+
dec = self.decode(quant_b)
|
| 115 |
+
return dec
|
| 116 |
+
|
| 117 |
+
def forward(self, input, return_pred_indices=False):
|
| 118 |
+
quant, diff, (_,_,ind) = self.encode(input)
|
| 119 |
+
dec = self.decode(quant)
|
| 120 |
+
if return_pred_indices:
|
| 121 |
+
return dec, diff, ind
|
| 122 |
+
return dec, diff
|
| 123 |
+
|
| 124 |
+
def get_input(self, batch, k):
|
| 125 |
+
x = batch[k]
|
| 126 |
+
if len(x.shape) == 3:
|
| 127 |
+
x = x[..., None]
|
| 128 |
+
x = x.permute(0, 3, 1, 2).to(memory_format=torch.contiguous_format).float()
|
| 129 |
+
if self.batch_resize_range is not None:
|
| 130 |
+
lower_size = self.batch_resize_range[0]
|
| 131 |
+
upper_size = self.batch_resize_range[1]
|
| 132 |
+
if self.global_step <= 4:
|
| 133 |
+
# do the first few batches with max size to avoid later oom
|
| 134 |
+
new_resize = upper_size
|
| 135 |
+
else:
|
| 136 |
+
new_resize = np.random.choice(np.arange(lower_size, upper_size+16, 16))
|
| 137 |
+
if new_resize != x.shape[2]:
|
| 138 |
+
x = F.interpolate(x, size=new_resize, mode="bicubic")
|
| 139 |
+
x = x.detach()
|
| 140 |
+
return x
|
| 141 |
+
|
| 142 |
+
def training_step(self, batch, batch_idx, optimizer_idx):
|
| 143 |
+
# https://github.com/pytorch/pytorch/issues/37142
|
| 144 |
+
# try not to fool the heuristics
|
| 145 |
+
x = self.get_input(batch, self.image_key)
|
| 146 |
+
xrec, qloss, ind = self(x, return_pred_indices=True)
|
| 147 |
+
|
| 148 |
+
if optimizer_idx == 0:
|
| 149 |
+
# autoencode
|
| 150 |
+
aeloss, log_dict_ae = self.loss(qloss, x, xrec, optimizer_idx, self.global_step,
|
| 151 |
+
last_layer=self.get_last_layer(), split="train",
|
| 152 |
+
predicted_indices=ind)
|
| 153 |
+
|
| 154 |
+
self.log_dict(log_dict_ae, prog_bar=False, logger=True, on_step=True, on_epoch=True)
|
| 155 |
+
return aeloss
|
| 156 |
+
|
| 157 |
+
if optimizer_idx == 1:
|
| 158 |
+
# discriminator
|
| 159 |
+
discloss, log_dict_disc = self.loss(qloss, x, xrec, optimizer_idx, self.global_step,
|
| 160 |
+
last_layer=self.get_last_layer(), split="train")
|
| 161 |
+
self.log_dict(log_dict_disc, prog_bar=False, logger=True, on_step=True, on_epoch=True)
|
| 162 |
+
return discloss
|
| 163 |
+
|
| 164 |
+
def validation_step(self, batch, batch_idx):
|
| 165 |
+
log_dict = self._validation_step(batch, batch_idx)
|
| 166 |
+
with self.ema_scope():
|
| 167 |
+
log_dict_ema = self._validation_step(batch, batch_idx, suffix="_ema")
|
| 168 |
+
return log_dict
|
| 169 |
+
|
| 170 |
+
def _validation_step(self, batch, batch_idx, suffix=""):
|
| 171 |
+
x = self.get_input(batch, self.image_key)
|
| 172 |
+
xrec, qloss, ind = self(x, return_pred_indices=True)
|
| 173 |
+
aeloss, log_dict_ae = self.loss(qloss, x, xrec, 0,
|
| 174 |
+
self.global_step,
|
| 175 |
+
last_layer=self.get_last_layer(),
|
| 176 |
+
split="val"+suffix,
|
| 177 |
+
predicted_indices=ind
|
| 178 |
+
)
|
| 179 |
+
|
| 180 |
+
discloss, log_dict_disc = self.loss(qloss, x, xrec, 1,
|
| 181 |
+
self.global_step,
|
| 182 |
+
last_layer=self.get_last_layer(),
|
| 183 |
+
split="val"+suffix,
|
| 184 |
+
predicted_indices=ind
|
| 185 |
+
)
|
| 186 |
+
rec_loss = log_dict_ae[f"val{suffix}/rec_loss"]
|
| 187 |
+
self.log(f"val{suffix}/rec_loss", rec_loss,
|
| 188 |
+
prog_bar=True, logger=True, on_step=False, on_epoch=True, sync_dist=True)
|
| 189 |
+
self.log(f"val{suffix}/aeloss", aeloss,
|
| 190 |
+
prog_bar=True, logger=True, on_step=False, on_epoch=True, sync_dist=True)
|
| 191 |
+
if version.parse(pl.__version__) >= version.parse('1.4.0'):
|
| 192 |
+
del log_dict_ae[f"val{suffix}/rec_loss"]
|
| 193 |
+
self.log_dict(log_dict_ae)
|
| 194 |
+
self.log_dict(log_dict_disc)
|
| 195 |
+
return self.log_dict
|
| 196 |
+
|
| 197 |
+
def configure_optimizers(self):
|
| 198 |
+
lr_d = self.learning_rate
|
| 199 |
+
lr_g = self.lr_g_factor*self.learning_rate
|
| 200 |
+
print("lr_d", lr_d)
|
| 201 |
+
print("lr_g", lr_g)
|
| 202 |
+
opt_ae = torch.optim.Adam(list(self.encoder.parameters())+
|
| 203 |
+
list(self.decoder.parameters())+
|
| 204 |
+
list(self.quantize.parameters())+
|
| 205 |
+
list(self.quant_conv.parameters())+
|
| 206 |
+
list(self.post_quant_conv.parameters()),
|
| 207 |
+
lr=lr_g, betas=(0.5, 0.9))
|
| 208 |
+
opt_disc = torch.optim.Adam(self.loss.discriminator.parameters(),
|
| 209 |
+
lr=lr_d, betas=(0.5, 0.9))
|
| 210 |
+
|
| 211 |
+
if self.scheduler_config is not None:
|
| 212 |
+
scheduler = instantiate_from_config(self.scheduler_config)
|
| 213 |
+
|
| 214 |
+
print("Setting up LambdaLR scheduler...")
|
| 215 |
+
scheduler = [
|
| 216 |
+
{
|
| 217 |
+
'scheduler': LambdaLR(opt_ae, lr_lambda=scheduler.schedule),
|
| 218 |
+
'interval': 'step',
|
| 219 |
+
'frequency': 1
|
| 220 |
+
},
|
| 221 |
+
{
|
| 222 |
+
'scheduler': LambdaLR(opt_disc, lr_lambda=scheduler.schedule),
|
| 223 |
+
'interval': 'step',
|
| 224 |
+
'frequency': 1
|
| 225 |
+
},
|
| 226 |
+
]
|
| 227 |
+
return [opt_ae, opt_disc], scheduler
|
| 228 |
+
return [opt_ae, opt_disc], []
|
| 229 |
+
|
| 230 |
+
def get_last_layer(self):
|
| 231 |
+
return self.decoder.conv_out.weight
|
| 232 |
+
|
| 233 |
+
def log_images(self, batch, only_inputs=False, plot_ema=False, **kwargs):
|
| 234 |
+
log = dict()
|
| 235 |
+
x = self.get_input(batch, self.image_key)
|
| 236 |
+
x = x.to(self.device)
|
| 237 |
+
if only_inputs:
|
| 238 |
+
log["inputs"] = x
|
| 239 |
+
return log
|
| 240 |
+
xrec, _ = self(x)
|
| 241 |
+
if x.shape[1] > 3:
|
| 242 |
+
# colorize with random projection
|
| 243 |
+
assert xrec.shape[1] > 3
|
| 244 |
+
x = self.to_rgb(x)
|
| 245 |
+
xrec = self.to_rgb(xrec)
|
| 246 |
+
log["inputs"] = x
|
| 247 |
+
log["reconstructions"] = xrec
|
| 248 |
+
if plot_ema:
|
| 249 |
+
with self.ema_scope():
|
| 250 |
+
xrec_ema, _ = self(x)
|
| 251 |
+
if x.shape[1] > 3: xrec_ema = self.to_rgb(xrec_ema)
|
| 252 |
+
log["reconstructions_ema"] = xrec_ema
|
| 253 |
+
return log
|
| 254 |
+
|
| 255 |
+
def to_rgb(self, x):
|
| 256 |
+
assert self.image_key == "segmentation"
|
| 257 |
+
if not hasattr(self, "colorize"):
|
| 258 |
+
self.register_buffer("colorize", torch.randn(3, x.shape[1], 1, 1).to(x))
|
| 259 |
+
x = F.conv2d(x, weight=self.colorize)
|
| 260 |
+
x = 2.*(x-x.min())/(x.max()-x.min()) - 1.
|
| 261 |
+
return x
|
| 262 |
+
|
| 263 |
+
|
| 264 |
+
class VQModelInterface(VQModel):
|
| 265 |
+
def __init__(self, embed_dim, *args, **kwargs):
|
| 266 |
+
super().__init__(embed_dim=embed_dim, *args, **kwargs)
|
| 267 |
+
self.embed_dim = embed_dim
|
| 268 |
+
|
| 269 |
+
def encode(self, x):
|
| 270 |
+
h = self.encoder(x)
|
| 271 |
+
h = self.quant_conv(h)
|
| 272 |
+
return h
|
| 273 |
+
|
| 274 |
+
def decode(self, h, force_not_quantize=False):
|
| 275 |
+
# also go through quantization layer
|
| 276 |
+
if not force_not_quantize:
|
| 277 |
+
quant, emb_loss, info = self.quantize(h)
|
| 278 |
+
else:
|
| 279 |
+
quant = h
|
| 280 |
+
quant = self.post_quant_conv(quant)
|
| 281 |
+
dec = self.decoder(quant)
|
| 282 |
+
return dec
|
| 283 |
+
|
| 284 |
+
|
| 285 |
+
class AutoencoderKL(pl.LightningModule):
|
| 286 |
+
def __init__(self,
|
| 287 |
+
ddconfig,
|
| 288 |
+
lossconfig,
|
| 289 |
+
embed_dim,
|
| 290 |
+
ckpt_path=None,
|
| 291 |
+
ignore_keys=[],
|
| 292 |
+
image_key="image",
|
| 293 |
+
colorize_nlabels=None,
|
| 294 |
+
monitor=None,
|
| 295 |
+
):
|
| 296 |
+
super().__init__()
|
| 297 |
+
self.image_key = image_key
|
| 298 |
+
self.encoder = Encoder(**ddconfig)
|
| 299 |
+
self.decoder = Decoder(**ddconfig)
|
| 300 |
+
self.loss = instantiate_from_config(lossconfig)
|
| 301 |
+
assert ddconfig["double_z"]
|
| 302 |
+
self.quant_conv = torch.nn.Conv2d(2*ddconfig["z_channels"], 2*embed_dim, 1)
|
| 303 |
+
self.post_quant_conv = torch.nn.Conv2d(embed_dim, ddconfig["z_channels"], 1)
|
| 304 |
+
self.embed_dim = embed_dim
|
| 305 |
+
if colorize_nlabels is not None:
|
| 306 |
+
assert type(colorize_nlabels)==int
|
| 307 |
+
self.register_buffer("colorize", torch.randn(3, colorize_nlabels, 1, 1))
|
| 308 |
+
if monitor is not None:
|
| 309 |
+
self.monitor = monitor
|
| 310 |
+
if ckpt_path is not None:
|
| 311 |
+
self.init_from_ckpt(ckpt_path, ignore_keys=ignore_keys)
|
| 312 |
+
|
| 313 |
+
def init_from_ckpt(self, path, ignore_keys=list()):
|
| 314 |
+
sd = torch.load(path, map_location="cpu")["state_dict"]
|
| 315 |
+
keys = list(sd.keys())
|
| 316 |
+
for k in keys:
|
| 317 |
+
for ik in ignore_keys:
|
| 318 |
+
if k.startswith(ik):
|
| 319 |
+
print("Deleting key {} from state_dict.".format(k))
|
| 320 |
+
del sd[k]
|
| 321 |
+
self.load_state_dict(sd, strict=False)
|
| 322 |
+
print(f"Restored from {path}")
|
| 323 |
+
|
| 324 |
+
def encode(self, x):
|
| 325 |
+
h = self.encoder(x)
|
| 326 |
+
moments = self.quant_conv(h)
|
| 327 |
+
posterior = DiagonalGaussianDistribution(moments)
|
| 328 |
+
return posterior
|
| 329 |
+
|
| 330 |
+
def decode(self, z):
|
| 331 |
+
z = self.post_quant_conv(z)
|
| 332 |
+
dec = self.decoder(z)
|
| 333 |
+
return dec
|
| 334 |
+
|
| 335 |
+
def forward(self, input, sample_posterior=True):
|
| 336 |
+
posterior = self.encode(input)
|
| 337 |
+
if sample_posterior:
|
| 338 |
+
z = posterior.sample()
|
| 339 |
+
else:
|
| 340 |
+
z = posterior.mode()
|
| 341 |
+
dec = self.decode(z)
|
| 342 |
+
return dec, posterior
|
| 343 |
+
|
| 344 |
+
def get_input(self, batch, k):
|
| 345 |
+
x = batch[k]
|
| 346 |
+
if len(x.shape) == 3:
|
| 347 |
+
x = x[..., None]
|
| 348 |
+
x = x.permute(0, 3, 1, 2).to(memory_format=torch.contiguous_format).float()
|
| 349 |
+
return x
|
| 350 |
+
|
| 351 |
+
def training_step(self, batch, batch_idx, optimizer_idx):
|
| 352 |
+
inputs = self.get_input(batch, self.image_key)
|
| 353 |
+
reconstructions, posterior = self(inputs)
|
| 354 |
+
|
| 355 |
+
if optimizer_idx == 0:
|
| 356 |
+
# train encoder+decoder+logvar
|
| 357 |
+
aeloss, log_dict_ae = self.loss(inputs, reconstructions, posterior, optimizer_idx, self.global_step,
|
| 358 |
+
last_layer=self.get_last_layer(), split="train")
|
| 359 |
+
self.log("aeloss", aeloss, prog_bar=True, logger=True, on_step=True, on_epoch=True)
|
| 360 |
+
self.log_dict(log_dict_ae, prog_bar=False, logger=True, on_step=True, on_epoch=False)
|
| 361 |
+
return aeloss
|
| 362 |
+
|
| 363 |
+
if optimizer_idx == 1:
|
| 364 |
+
# train the discriminator
|
| 365 |
+
discloss, log_dict_disc = self.loss(inputs, reconstructions, posterior, optimizer_idx, self.global_step,
|
| 366 |
+
last_layer=self.get_last_layer(), split="train")
|
| 367 |
+
|
| 368 |
+
self.log("discloss", discloss, prog_bar=True, logger=True, on_step=True, on_epoch=True)
|
| 369 |
+
self.log_dict(log_dict_disc, prog_bar=False, logger=True, on_step=True, on_epoch=False)
|
| 370 |
+
return discloss
|
| 371 |
+
|
| 372 |
+
def validation_step(self, batch, batch_idx):
|
| 373 |
+
inputs = self.get_input(batch, self.image_key)
|
| 374 |
+
reconstructions, posterior = self(inputs)
|
| 375 |
+
aeloss, log_dict_ae = self.loss(inputs, reconstructions, posterior, 0, self.global_step,
|
| 376 |
+
last_layer=self.get_last_layer(), split="val")
|
| 377 |
+
|
| 378 |
+
discloss, log_dict_disc = self.loss(inputs, reconstructions, posterior, 1, self.global_step,
|
| 379 |
+
last_layer=self.get_last_layer(), split="val")
|
| 380 |
+
|
| 381 |
+
self.log("val/rec_loss", log_dict_ae["val/rec_loss"])
|
| 382 |
+
self.log_dict(log_dict_ae)
|
| 383 |
+
self.log_dict(log_dict_disc)
|
| 384 |
+
return self.log_dict
|
| 385 |
+
|
| 386 |
+
def configure_optimizers(self):
|
| 387 |
+
lr = self.learning_rate
|
| 388 |
+
opt_ae = torch.optim.Adam(list(self.encoder.parameters())+
|
| 389 |
+
list(self.decoder.parameters())+
|
| 390 |
+
list(self.quant_conv.parameters())+
|
| 391 |
+
list(self.post_quant_conv.parameters()),
|
| 392 |
+
lr=lr, betas=(0.5, 0.9))
|
| 393 |
+
opt_disc = torch.optim.Adam(self.loss.discriminator.parameters(),
|
| 394 |
+
lr=lr, betas=(0.5, 0.9))
|
| 395 |
+
return [opt_ae, opt_disc], []
|
| 396 |
+
|
| 397 |
+
def get_last_layer(self):
|
| 398 |
+
return self.decoder.conv_out.weight
|
| 399 |
+
|
| 400 |
+
@torch.no_grad()
|
| 401 |
+
def log_images(self, batch, only_inputs=False, **kwargs):
|
| 402 |
+
log = dict()
|
| 403 |
+
x = self.get_input(batch, self.image_key)
|
| 404 |
+
x = x.to(self.device)
|
| 405 |
+
if not only_inputs:
|
| 406 |
+
xrec, posterior = self(x)
|
| 407 |
+
if x.shape[1] > 3:
|
| 408 |
+
# colorize with random projection
|
| 409 |
+
assert xrec.shape[1] > 3
|
| 410 |
+
x = self.to_rgb(x)
|
| 411 |
+
xrec = self.to_rgb(xrec)
|
| 412 |
+
log["samples"] = self.decode(torch.randn_like(posterior.sample()))
|
| 413 |
+
log["reconstructions"] = xrec
|
| 414 |
+
log["inputs"] = x
|
| 415 |
+
return log
|
| 416 |
+
|
| 417 |
+
def to_rgb(self, x):
|
| 418 |
+
assert self.image_key == "segmentation"
|
| 419 |
+
if not hasattr(self, "colorize"):
|
| 420 |
+
self.register_buffer("colorize", torch.randn(3, x.shape[1], 1, 1).to(x))
|
| 421 |
+
x = F.conv2d(x, weight=self.colorize)
|
| 422 |
+
x = 2.*(x-x.min())/(x.max()-x.min()) - 1.
|
| 423 |
+
return x
|
| 424 |
+
|
| 425 |
+
|
| 426 |
+
class IdentityFirstStage(torch.nn.Module):
|
| 427 |
+
def __init__(self, *args, vq_interface=False, **kwargs):
|
| 428 |
+
self.vq_interface = vq_interface # TODO: Should be true by default but check to not break older stuff
|
| 429 |
+
super().__init__()
|
| 430 |
+
|
| 431 |
+
def encode(self, x, *args, **kwargs):
|
| 432 |
+
return x
|
| 433 |
+
|
| 434 |
+
def decode(self, x, *args, **kwargs):
|
| 435 |
+
return x
|
| 436 |
+
|
| 437 |
+
def quantize(self, x, *args, **kwargs):
|
| 438 |
+
if self.vq_interface:
|
| 439 |
+
return x, None, [None, None, None]
|
| 440 |
+
return x
|
| 441 |
+
|
| 442 |
+
def forward(self, x, *args, **kwargs):
|
| 443 |
+
return x
|
ldm/models/diffusion/__init__.py
ADDED
|
File without changes
|
ldm/models/diffusion/classifier.py
ADDED
|
@@ -0,0 +1,267 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import os
|
| 2 |
+
import torch
|
| 3 |
+
import pytorch_lightning as pl
|
| 4 |
+
from omegaconf import OmegaConf
|
| 5 |
+
from torch.nn import functional as F
|
| 6 |
+
from torch.optim import AdamW
|
| 7 |
+
from torch.optim.lr_scheduler import LambdaLR
|
| 8 |
+
from copy import deepcopy
|
| 9 |
+
from einops import rearrange
|
| 10 |
+
from glob import glob
|
| 11 |
+
from natsort import natsorted
|
| 12 |
+
|
| 13 |
+
from ldm.modules.diffusionmodules.openaimodel import EncoderUNetModel, UNetModel
|
| 14 |
+
from ldm.util import log_txt_as_img, default, ismap, instantiate_from_config
|
| 15 |
+
|
| 16 |
+
__models__ = {
|
| 17 |
+
'class_label': EncoderUNetModel,
|
| 18 |
+
'segmentation': UNetModel
|
| 19 |
+
}
|
| 20 |
+
|
| 21 |
+
|
| 22 |
+
def disabled_train(self, mode=True):
|
| 23 |
+
"""Overwrite model.train with this function to make sure train/eval mode
|
| 24 |
+
does not change anymore."""
|
| 25 |
+
return self
|
| 26 |
+
|
| 27 |
+
|
| 28 |
+
class NoisyLatentImageClassifier(pl.LightningModule):
|
| 29 |
+
|
| 30 |
+
def __init__(self,
|
| 31 |
+
diffusion_path,
|
| 32 |
+
num_classes,
|
| 33 |
+
ckpt_path=None,
|
| 34 |
+
pool='attention',
|
| 35 |
+
label_key=None,
|
| 36 |
+
diffusion_ckpt_path=None,
|
| 37 |
+
scheduler_config=None,
|
| 38 |
+
weight_decay=1.e-2,
|
| 39 |
+
log_steps=10,
|
| 40 |
+
monitor='val/loss',
|
| 41 |
+
*args,
|
| 42 |
+
**kwargs):
|
| 43 |
+
super().__init__(*args, **kwargs)
|
| 44 |
+
self.num_classes = num_classes
|
| 45 |
+
# get latest config of diffusion model
|
| 46 |
+
diffusion_config = natsorted(glob(os.path.join(diffusion_path, 'configs', '*-project.yaml')))[-1]
|
| 47 |
+
self.diffusion_config = OmegaConf.load(diffusion_config).model
|
| 48 |
+
self.diffusion_config.params.ckpt_path = diffusion_ckpt_path
|
| 49 |
+
self.load_diffusion()
|
| 50 |
+
|
| 51 |
+
self.monitor = monitor
|
| 52 |
+
self.numd = self.diffusion_model.first_stage_model.encoder.num_resolutions - 1
|
| 53 |
+
self.log_time_interval = self.diffusion_model.num_timesteps // log_steps
|
| 54 |
+
self.log_steps = log_steps
|
| 55 |
+
|
| 56 |
+
self.label_key = label_key if not hasattr(self.diffusion_model, 'cond_stage_key') \
|
| 57 |
+
else self.diffusion_model.cond_stage_key
|
| 58 |
+
|
| 59 |
+
assert self.label_key is not None, 'label_key neither in diffusion model nor in model.params'
|
| 60 |
+
|
| 61 |
+
if self.label_key not in __models__:
|
| 62 |
+
raise NotImplementedError()
|
| 63 |
+
|
| 64 |
+
self.load_classifier(ckpt_path, pool)
|
| 65 |
+
|
| 66 |
+
self.scheduler_config = scheduler_config
|
| 67 |
+
self.use_scheduler = self.scheduler_config is not None
|
| 68 |
+
self.weight_decay = weight_decay
|
| 69 |
+
|
| 70 |
+
def init_from_ckpt(self, path, ignore_keys=list(), only_model=False):
|
| 71 |
+
sd = torch.load(path, map_location="cpu")
|
| 72 |
+
if "state_dict" in list(sd.keys()):
|
| 73 |
+
sd = sd["state_dict"]
|
| 74 |
+
keys = list(sd.keys())
|
| 75 |
+
for k in keys:
|
| 76 |
+
for ik in ignore_keys:
|
| 77 |
+
if k.startswith(ik):
|
| 78 |
+
print("Deleting key {} from state_dict.".format(k))
|
| 79 |
+
del sd[k]
|
| 80 |
+
missing, unexpected = self.load_state_dict(sd, strict=False) if not only_model else self.model.load_state_dict(
|
| 81 |
+
sd, strict=False)
|
| 82 |
+
print(f"Restored from {path} with {len(missing)} missing and {len(unexpected)} unexpected keys")
|
| 83 |
+
if len(missing) > 0:
|
| 84 |
+
print(f"Missing Keys: {missing}")
|
| 85 |
+
if len(unexpected) > 0:
|
| 86 |
+
print(f"Unexpected Keys: {unexpected}")
|
| 87 |
+
|
| 88 |
+
def load_diffusion(self):
|
| 89 |
+
model = instantiate_from_config(self.diffusion_config)
|
| 90 |
+
self.diffusion_model = model.eval()
|
| 91 |
+
self.diffusion_model.train = disabled_train
|
| 92 |
+
for param in self.diffusion_model.parameters():
|
| 93 |
+
param.requires_grad = False
|
| 94 |
+
|
| 95 |
+
def load_classifier(self, ckpt_path, pool):
|
| 96 |
+
model_config = deepcopy(self.diffusion_config.params.unet_config.params)
|
| 97 |
+
model_config.in_channels = self.diffusion_config.params.unet_config.params.out_channels
|
| 98 |
+
model_config.out_channels = self.num_classes
|
| 99 |
+
if self.label_key == 'class_label':
|
| 100 |
+
model_config.pool = pool
|
| 101 |
+
|
| 102 |
+
self.model = __models__[self.label_key](**model_config)
|
| 103 |
+
if ckpt_path is not None:
|
| 104 |
+
print('#####################################################################')
|
| 105 |
+
print(f'load from ckpt "{ckpt_path}"')
|
| 106 |
+
print('#####################################################################')
|
| 107 |
+
self.init_from_ckpt(ckpt_path)
|
| 108 |
+
|
| 109 |
+
@torch.no_grad()
|
| 110 |
+
def get_x_noisy(self, x, t, noise=None):
|
| 111 |
+
noise = default(noise, lambda: torch.randn_like(x))
|
| 112 |
+
continuous_sqrt_alpha_cumprod = None
|
| 113 |
+
if self.diffusion_model.use_continuous_noise:
|
| 114 |
+
continuous_sqrt_alpha_cumprod = self.diffusion_model.sample_continuous_noise_level(x.shape[0], t + 1)
|
| 115 |
+
# todo: make sure t+1 is correct here
|
| 116 |
+
|
| 117 |
+
return self.diffusion_model.q_sample(x_start=x, t=t, noise=noise,
|
| 118 |
+
continuous_sqrt_alpha_cumprod=continuous_sqrt_alpha_cumprod)
|
| 119 |
+
|
| 120 |
+
def forward(self, x_noisy, t, *args, **kwargs):
|
| 121 |
+
return self.model(x_noisy, t)
|
| 122 |
+
|
| 123 |
+
@torch.no_grad()
|
| 124 |
+
def get_input(self, batch, k):
|
| 125 |
+
x = batch[k]
|
| 126 |
+
if len(x.shape) == 3:
|
| 127 |
+
x = x[..., None]
|
| 128 |
+
x = rearrange(x, 'b h w c -> b c h w')
|
| 129 |
+
x = x.to(memory_format=torch.contiguous_format).float()
|
| 130 |
+
return x
|
| 131 |
+
|
| 132 |
+
@torch.no_grad()
|
| 133 |
+
def get_conditioning(self, batch, k=None):
|
| 134 |
+
if k is None:
|
| 135 |
+
k = self.label_key
|
| 136 |
+
assert k is not None, 'Needs to provide label key'
|
| 137 |
+
|
| 138 |
+
targets = batch[k].to(self.device)
|
| 139 |
+
|
| 140 |
+
if self.label_key == 'segmentation':
|
| 141 |
+
targets = rearrange(targets, 'b h w c -> b c h w')
|
| 142 |
+
for down in range(self.numd):
|
| 143 |
+
h, w = targets.shape[-2:]
|
| 144 |
+
targets = F.interpolate(targets, size=(h // 2, w // 2), mode='nearest')
|
| 145 |
+
|
| 146 |
+
# targets = rearrange(targets,'b c h w -> b h w c')
|
| 147 |
+
|
| 148 |
+
return targets
|
| 149 |
+
|
| 150 |
+
def compute_top_k(self, logits, labels, k, reduction="mean"):
|
| 151 |
+
_, top_ks = torch.topk(logits, k, dim=1)
|
| 152 |
+
if reduction == "mean":
|
| 153 |
+
return (top_ks == labels[:, None]).float().sum(dim=-1).mean().item()
|
| 154 |
+
elif reduction == "none":
|
| 155 |
+
return (top_ks == labels[:, None]).float().sum(dim=-1)
|
| 156 |
+
|
| 157 |
+
def on_train_epoch_start(self):
|
| 158 |
+
# save some memory
|
| 159 |
+
self.diffusion_model.model.to('cpu')
|
| 160 |
+
|
| 161 |
+
@torch.no_grad()
|
| 162 |
+
def write_logs(self, loss, logits, targets):
|
| 163 |
+
log_prefix = 'train' if self.training else 'val'
|
| 164 |
+
log = {}
|
| 165 |
+
log[f"{log_prefix}/loss"] = loss.mean()
|
| 166 |
+
log[f"{log_prefix}/acc@1"] = self.compute_top_k(
|
| 167 |
+
logits, targets, k=1, reduction="mean"
|
| 168 |
+
)
|
| 169 |
+
log[f"{log_prefix}/acc@5"] = self.compute_top_k(
|
| 170 |
+
logits, targets, k=5, reduction="mean"
|
| 171 |
+
)
|
| 172 |
+
|
| 173 |
+
self.log_dict(log, prog_bar=False, logger=True, on_step=self.training, on_epoch=True)
|
| 174 |
+
self.log('loss', log[f"{log_prefix}/loss"], prog_bar=True, logger=False)
|
| 175 |
+
self.log('global_step', self.global_step, logger=False, on_epoch=False, prog_bar=True)
|
| 176 |
+
lr = self.optimizers().param_groups[0]['lr']
|
| 177 |
+
self.log('lr_abs', lr, on_step=True, logger=True, on_epoch=False, prog_bar=True)
|
| 178 |
+
|
| 179 |
+
def shared_step(self, batch, t=None):
|
| 180 |
+
x, *_ = self.diffusion_model.get_input(batch, k=self.diffusion_model.first_stage_key)
|
| 181 |
+
targets = self.get_conditioning(batch)
|
| 182 |
+
if targets.dim() == 4:
|
| 183 |
+
targets = targets.argmax(dim=1)
|
| 184 |
+
if t is None:
|
| 185 |
+
t = torch.randint(0, self.diffusion_model.num_timesteps, (x.shape[0],), device=self.device).long()
|
| 186 |
+
else:
|
| 187 |
+
t = torch.full(size=(x.shape[0],), fill_value=t, device=self.device).long()
|
| 188 |
+
x_noisy = self.get_x_noisy(x, t)
|
| 189 |
+
logits = self(x_noisy, t)
|
| 190 |
+
|
| 191 |
+
loss = F.cross_entropy(logits, targets, reduction='none')
|
| 192 |
+
|
| 193 |
+
self.write_logs(loss.detach(), logits.detach(), targets.detach())
|
| 194 |
+
|
| 195 |
+
loss = loss.mean()
|
| 196 |
+
return loss, logits, x_noisy, targets
|
| 197 |
+
|
| 198 |
+
def training_step(self, batch, batch_idx):
|
| 199 |
+
loss, *_ = self.shared_step(batch)
|
| 200 |
+
return loss
|
| 201 |
+
|
| 202 |
+
def reset_noise_accs(self):
|
| 203 |
+
self.noisy_acc = {t: {'acc@1': [], 'acc@5': []} for t in
|
| 204 |
+
range(0, self.diffusion_model.num_timesteps, self.diffusion_model.log_every_t)}
|
| 205 |
+
|
| 206 |
+
def on_validation_start(self):
|
| 207 |
+
self.reset_noise_accs()
|
| 208 |
+
|
| 209 |
+
@torch.no_grad()
|
| 210 |
+
def validation_step(self, batch, batch_idx):
|
| 211 |
+
loss, *_ = self.shared_step(batch)
|
| 212 |
+
|
| 213 |
+
for t in self.noisy_acc:
|
| 214 |
+
_, logits, _, targets = self.shared_step(batch, t)
|
| 215 |
+
self.noisy_acc[t]['acc@1'].append(self.compute_top_k(logits, targets, k=1, reduction='mean'))
|
| 216 |
+
self.noisy_acc[t]['acc@5'].append(self.compute_top_k(logits, targets, k=5, reduction='mean'))
|
| 217 |
+
|
| 218 |
+
return loss
|
| 219 |
+
|
| 220 |
+
def configure_optimizers(self):
|
| 221 |
+
optimizer = AdamW(self.model.parameters(), lr=self.learning_rate, weight_decay=self.weight_decay)
|
| 222 |
+
|
| 223 |
+
if self.use_scheduler:
|
| 224 |
+
scheduler = instantiate_from_config(self.scheduler_config)
|
| 225 |
+
|
| 226 |
+
print("Setting up LambdaLR scheduler...")
|
| 227 |
+
scheduler = [
|
| 228 |
+
{
|
| 229 |
+
'scheduler': LambdaLR(optimizer, lr_lambda=scheduler.schedule),
|
| 230 |
+
'interval': 'step',
|
| 231 |
+
'frequency': 1
|
| 232 |
+
}]
|
| 233 |
+
return [optimizer], scheduler
|
| 234 |
+
|
| 235 |
+
return optimizer
|
| 236 |
+
|
| 237 |
+
@torch.no_grad()
|
| 238 |
+
def log_images(self, batch, N=8, *args, **kwargs):
|
| 239 |
+
log = dict()
|
| 240 |
+
x = self.get_input(batch, self.diffusion_model.first_stage_key)
|
| 241 |
+
log['inputs'] = x
|
| 242 |
+
|
| 243 |
+
y = self.get_conditioning(batch)
|
| 244 |
+
|
| 245 |
+
if self.label_key == 'class_label':
|
| 246 |
+
y = log_txt_as_img((x.shape[2], x.shape[3]), batch["human_label"])
|
| 247 |
+
log['labels'] = y
|
| 248 |
+
|
| 249 |
+
if ismap(y):
|
| 250 |
+
log['labels'] = self.diffusion_model.to_rgb(y)
|
| 251 |
+
|
| 252 |
+
for step in range(self.log_steps):
|
| 253 |
+
current_time = step * self.log_time_interval
|
| 254 |
+
|
| 255 |
+
_, logits, x_noisy, _ = self.shared_step(batch, t=current_time)
|
| 256 |
+
|
| 257 |
+
log[f'inputs@t{current_time}'] = x_noisy
|
| 258 |
+
|
| 259 |
+
pred = F.one_hot(logits.argmax(dim=1), num_classes=self.num_classes)
|
| 260 |
+
pred = rearrange(pred, 'b h w c -> b c h w')
|
| 261 |
+
|
| 262 |
+
log[f'pred@t{current_time}'] = self.diffusion_model.to_rgb(pred)
|
| 263 |
+
|
| 264 |
+
for key in log:
|
| 265 |
+
log[key] = log[key][:N]
|
| 266 |
+
|
| 267 |
+
return log
|
ldm/models/diffusion/ddim.py
ADDED
|
@@ -0,0 +1,241 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
"""SAMPLING ONLY."""
|
| 2 |
+
|
| 3 |
+
import torch
|
| 4 |
+
import numpy as np
|
| 5 |
+
from tqdm import tqdm
|
| 6 |
+
from functools import partial
|
| 7 |
+
|
| 8 |
+
from ldm.modules.diffusionmodules.util import make_ddim_sampling_parameters, make_ddim_timesteps, noise_like, \
|
| 9 |
+
extract_into_tensor
|
| 10 |
+
|
| 11 |
+
|
| 12 |
+
class DDIMSampler(object):
|
| 13 |
+
def __init__(self, model, schedule="linear", **kwargs):
|
| 14 |
+
super().__init__()
|
| 15 |
+
self.model = model
|
| 16 |
+
self.ddpm_num_timesteps = model.num_timesteps
|
| 17 |
+
self.schedule = schedule
|
| 18 |
+
|
| 19 |
+
def register_buffer(self, name, attr):
|
| 20 |
+
if type(attr) == torch.Tensor:
|
| 21 |
+
if attr.device != torch.device("cuda"):
|
| 22 |
+
attr = attr.to(torch.device("cuda"))
|
| 23 |
+
setattr(self, name, attr)
|
| 24 |
+
|
| 25 |
+
def make_schedule(self, ddim_num_steps, ddim_discretize="uniform", ddim_eta=0., verbose=True):
|
| 26 |
+
self.ddim_timesteps = make_ddim_timesteps(ddim_discr_method=ddim_discretize, num_ddim_timesteps=ddim_num_steps,
|
| 27 |
+
num_ddpm_timesteps=self.ddpm_num_timesteps,verbose=verbose)
|
| 28 |
+
alphas_cumprod = self.model.alphas_cumprod
|
| 29 |
+
assert alphas_cumprod.shape[0] == self.ddpm_num_timesteps, 'alphas have to be defined for each timestep'
|
| 30 |
+
to_torch = lambda x: x.clone().detach().to(torch.float32).to(self.model.device)
|
| 31 |
+
|
| 32 |
+
self.register_buffer('betas', to_torch(self.model.betas))
|
| 33 |
+
self.register_buffer('alphas_cumprod', to_torch(alphas_cumprod))
|
| 34 |
+
self.register_buffer('alphas_cumprod_prev', to_torch(self.model.alphas_cumprod_prev))
|
| 35 |
+
|
| 36 |
+
# calculations for diffusion q(x_t | x_{t-1}) and others
|
| 37 |
+
self.register_buffer('sqrt_alphas_cumprod', to_torch(np.sqrt(alphas_cumprod.cpu())))
|
| 38 |
+
self.register_buffer('sqrt_one_minus_alphas_cumprod', to_torch(np.sqrt(1. - alphas_cumprod.cpu())))
|
| 39 |
+
self.register_buffer('log_one_minus_alphas_cumprod', to_torch(np.log(1. - alphas_cumprod.cpu())))
|
| 40 |
+
self.register_buffer('sqrt_recip_alphas_cumprod', to_torch(np.sqrt(1. / alphas_cumprod.cpu())))
|
| 41 |
+
self.register_buffer('sqrt_recipm1_alphas_cumprod', to_torch(np.sqrt(1. / alphas_cumprod.cpu() - 1)))
|
| 42 |
+
|
| 43 |
+
# ddim sampling parameters
|
| 44 |
+
ddim_sigmas, ddim_alphas, ddim_alphas_prev = make_ddim_sampling_parameters(alphacums=alphas_cumprod.cpu(),
|
| 45 |
+
ddim_timesteps=self.ddim_timesteps,
|
| 46 |
+
eta=ddim_eta,verbose=verbose)
|
| 47 |
+
self.register_buffer('ddim_sigmas', ddim_sigmas)
|
| 48 |
+
self.register_buffer('ddim_alphas', ddim_alphas)
|
| 49 |
+
self.register_buffer('ddim_alphas_prev', ddim_alphas_prev)
|
| 50 |
+
self.register_buffer('ddim_sqrt_one_minus_alphas', np.sqrt(1. - ddim_alphas))
|
| 51 |
+
sigmas_for_original_sampling_steps = ddim_eta * torch.sqrt(
|
| 52 |
+
(1 - self.alphas_cumprod_prev) / (1 - self.alphas_cumprod) * (
|
| 53 |
+
1 - self.alphas_cumprod / self.alphas_cumprod_prev))
|
| 54 |
+
self.register_buffer('ddim_sigmas_for_original_num_steps', sigmas_for_original_sampling_steps)
|
| 55 |
+
|
| 56 |
+
@torch.no_grad()
|
| 57 |
+
def sample(self,
|
| 58 |
+
S,
|
| 59 |
+
batch_size,
|
| 60 |
+
shape,
|
| 61 |
+
conditioning=None,
|
| 62 |
+
callback=None,
|
| 63 |
+
normals_sequence=None,
|
| 64 |
+
img_callback=None,
|
| 65 |
+
quantize_x0=False,
|
| 66 |
+
eta=0.,
|
| 67 |
+
mask=None,
|
| 68 |
+
x0=None,
|
| 69 |
+
temperature=1.,
|
| 70 |
+
noise_dropout=0.,
|
| 71 |
+
score_corrector=None,
|
| 72 |
+
corrector_kwargs=None,
|
| 73 |
+
verbose=True,
|
| 74 |
+
x_T=None,
|
| 75 |
+
log_every_t=100,
|
| 76 |
+
unconditional_guidance_scale=1.,
|
| 77 |
+
unconditional_conditioning=None,
|
| 78 |
+
# this has to come in the same format as the conditioning, # e.g. as encoded tokens, ...
|
| 79 |
+
**kwargs
|
| 80 |
+
):
|
| 81 |
+
if conditioning is not None:
|
| 82 |
+
if isinstance(conditioning, dict):
|
| 83 |
+
cbs = conditioning[list(conditioning.keys())[0]].shape[0]
|
| 84 |
+
if cbs != batch_size:
|
| 85 |
+
print(f"Warning: Got {cbs} conditionings but batch-size is {batch_size}")
|
| 86 |
+
else:
|
| 87 |
+
if conditioning.shape[0] != batch_size:
|
| 88 |
+
print(f"Warning: Got {conditioning.shape[0]} conditionings but batch-size is {batch_size}")
|
| 89 |
+
|
| 90 |
+
self.make_schedule(ddim_num_steps=S, ddim_eta=eta, verbose=verbose)
|
| 91 |
+
# sampling
|
| 92 |
+
C, H, W = shape
|
| 93 |
+
size = (batch_size, C, H, W)
|
| 94 |
+
print(f'Data shape for DDIM sampling is {size}, eta {eta}')
|
| 95 |
+
|
| 96 |
+
samples, intermediates = self.ddim_sampling(conditioning, size,
|
| 97 |
+
callback=callback,
|
| 98 |
+
img_callback=img_callback,
|
| 99 |
+
quantize_denoised=quantize_x0,
|
| 100 |
+
mask=mask, x0=x0,
|
| 101 |
+
ddim_use_original_steps=False,
|
| 102 |
+
noise_dropout=noise_dropout,
|
| 103 |
+
temperature=temperature,
|
| 104 |
+
score_corrector=score_corrector,
|
| 105 |
+
corrector_kwargs=corrector_kwargs,
|
| 106 |
+
x_T=x_T,
|
| 107 |
+
log_every_t=log_every_t,
|
| 108 |
+
unconditional_guidance_scale=unconditional_guidance_scale,
|
| 109 |
+
unconditional_conditioning=unconditional_conditioning,
|
| 110 |
+
)
|
| 111 |
+
return samples, intermediates
|
| 112 |
+
|
| 113 |
+
@torch.no_grad()
|
| 114 |
+
def ddim_sampling(self, cond, shape,
|
| 115 |
+
x_T=None, ddim_use_original_steps=False,
|
| 116 |
+
callback=None, timesteps=None, quantize_denoised=False,
|
| 117 |
+
mask=None, x0=None, img_callback=None, log_every_t=100,
|
| 118 |
+
temperature=1., noise_dropout=0., score_corrector=None, corrector_kwargs=None,
|
| 119 |
+
unconditional_guidance_scale=1., unconditional_conditioning=None,):
|
| 120 |
+
device = self.model.betas.device
|
| 121 |
+
b = shape[0]
|
| 122 |
+
if x_T is None:
|
| 123 |
+
img = torch.randn(shape, device=device)
|
| 124 |
+
else:
|
| 125 |
+
img = x_T
|
| 126 |
+
|
| 127 |
+
if timesteps is None:
|
| 128 |
+
timesteps = self.ddpm_num_timesteps if ddim_use_original_steps else self.ddim_timesteps
|
| 129 |
+
elif timesteps is not None and not ddim_use_original_steps:
|
| 130 |
+
subset_end = int(min(timesteps / self.ddim_timesteps.shape[0], 1) * self.ddim_timesteps.shape[0]) - 1
|
| 131 |
+
timesteps = self.ddim_timesteps[:subset_end]
|
| 132 |
+
|
| 133 |
+
intermediates = {'x_inter': [img], 'pred_x0': [img]}
|
| 134 |
+
time_range = reversed(range(0,timesteps)) if ddim_use_original_steps else np.flip(timesteps)
|
| 135 |
+
total_steps = timesteps if ddim_use_original_steps else timesteps.shape[0]
|
| 136 |
+
print(f"Running DDIM Sampling with {total_steps} timesteps")
|
| 137 |
+
|
| 138 |
+
iterator = tqdm(time_range, desc='DDIM Sampler', total=total_steps)
|
| 139 |
+
|
| 140 |
+
for i, step in enumerate(iterator):
|
| 141 |
+
index = total_steps - i - 1
|
| 142 |
+
ts = torch.full((b,), step, device=device, dtype=torch.long)
|
| 143 |
+
|
| 144 |
+
if mask is not None:
|
| 145 |
+
assert x0 is not None
|
| 146 |
+
img_orig = self.model.q_sample(x0, ts) # TODO: deterministic forward pass?
|
| 147 |
+
img = img_orig * mask + (1. - mask) * img
|
| 148 |
+
|
| 149 |
+
outs = self.p_sample_ddim(img, cond, ts, index=index, use_original_steps=ddim_use_original_steps,
|
| 150 |
+
quantize_denoised=quantize_denoised, temperature=temperature,
|
| 151 |
+
noise_dropout=noise_dropout, score_corrector=score_corrector,
|
| 152 |
+
corrector_kwargs=corrector_kwargs,
|
| 153 |
+
unconditional_guidance_scale=unconditional_guidance_scale,
|
| 154 |
+
unconditional_conditioning=unconditional_conditioning)
|
| 155 |
+
img, pred_x0 = outs
|
| 156 |
+
if callback: callback(i)
|
| 157 |
+
if img_callback: img_callback(pred_x0, i)
|
| 158 |
+
|
| 159 |
+
if index % log_every_t == 0 or index == total_steps - 1:
|
| 160 |
+
intermediates['x_inter'].append(img)
|
| 161 |
+
intermediates['pred_x0'].append(pred_x0)
|
| 162 |
+
|
| 163 |
+
return img, intermediates
|
| 164 |
+
|
| 165 |
+
@torch.no_grad()
|
| 166 |
+
def p_sample_ddim(self, x, c, t, index, repeat_noise=False, use_original_steps=False, quantize_denoised=False,
|
| 167 |
+
temperature=1., noise_dropout=0., score_corrector=None, corrector_kwargs=None,
|
| 168 |
+
unconditional_guidance_scale=1., unconditional_conditioning=None):
|
| 169 |
+
b, *_, device = *x.shape, x.device
|
| 170 |
+
|
| 171 |
+
if unconditional_conditioning is None or unconditional_guidance_scale == 1.:
|
| 172 |
+
e_t = self.model.apply_model(x, t, c)
|
| 173 |
+
else:
|
| 174 |
+
x_in = torch.cat([x] * 2)
|
| 175 |
+
t_in = torch.cat([t] * 2)
|
| 176 |
+
c_in = torch.cat([unconditional_conditioning, c])
|
| 177 |
+
e_t_uncond, e_t = self.model.apply_model(x_in, t_in, c_in).chunk(2)
|
| 178 |
+
e_t = e_t_uncond + unconditional_guidance_scale * (e_t - e_t_uncond)
|
| 179 |
+
|
| 180 |
+
if score_corrector is not None:
|
| 181 |
+
assert self.model.parameterization == "eps"
|
| 182 |
+
e_t = score_corrector.modify_score(self.model, e_t, x, t, c, **corrector_kwargs)
|
| 183 |
+
|
| 184 |
+
alphas = self.model.alphas_cumprod if use_original_steps else self.ddim_alphas
|
| 185 |
+
alphas_prev = self.model.alphas_cumprod_prev if use_original_steps else self.ddim_alphas_prev
|
| 186 |
+
sqrt_one_minus_alphas = self.model.sqrt_one_minus_alphas_cumprod if use_original_steps else self.ddim_sqrt_one_minus_alphas
|
| 187 |
+
sigmas = self.model.ddim_sigmas_for_original_num_steps if use_original_steps else self.ddim_sigmas
|
| 188 |
+
# select parameters corresponding to the currently considered timestep
|
| 189 |
+
a_t = torch.full((b, 1, 1, 1), alphas[index], device=device)
|
| 190 |
+
a_prev = torch.full((b, 1, 1, 1), alphas_prev[index], device=device)
|
| 191 |
+
sigma_t = torch.full((b, 1, 1, 1), sigmas[index], device=device)
|
| 192 |
+
sqrt_one_minus_at = torch.full((b, 1, 1, 1), sqrt_one_minus_alphas[index],device=device)
|
| 193 |
+
|
| 194 |
+
# current prediction for x_0
|
| 195 |
+
pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()
|
| 196 |
+
if quantize_denoised:
|
| 197 |
+
pred_x0, _, *_ = self.model.first_stage_model.quantize(pred_x0)
|
| 198 |
+
# direction pointing to x_t
|
| 199 |
+
dir_xt = (1. - a_prev - sigma_t**2).sqrt() * e_t
|
| 200 |
+
noise = sigma_t * noise_like(x.shape, device, repeat_noise) * temperature
|
| 201 |
+
if noise_dropout > 0.:
|
| 202 |
+
noise = torch.nn.functional.dropout(noise, p=noise_dropout)
|
| 203 |
+
x_prev = a_prev.sqrt() * pred_x0 + dir_xt + noise
|
| 204 |
+
return x_prev, pred_x0
|
| 205 |
+
|
| 206 |
+
@torch.no_grad()
|
| 207 |
+
def stochastic_encode(self, x0, t, use_original_steps=False, noise=None):
|
| 208 |
+
# fast, but does not allow for exact reconstruction
|
| 209 |
+
# t serves as an index to gather the correct alphas
|
| 210 |
+
if use_original_steps:
|
| 211 |
+
sqrt_alphas_cumprod = self.sqrt_alphas_cumprod
|
| 212 |
+
sqrt_one_minus_alphas_cumprod = self.sqrt_one_minus_alphas_cumprod
|
| 213 |
+
else:
|
| 214 |
+
sqrt_alphas_cumprod = torch.sqrt(self.ddim_alphas)
|
| 215 |
+
sqrt_one_minus_alphas_cumprod = self.ddim_sqrt_one_minus_alphas
|
| 216 |
+
|
| 217 |
+
if noise is None:
|
| 218 |
+
noise = torch.randn_like(x0)
|
| 219 |
+
return (extract_into_tensor(sqrt_alphas_cumprod, t, x0.shape) * x0 +
|
| 220 |
+
extract_into_tensor(sqrt_one_minus_alphas_cumprod, t, x0.shape) * noise)
|
| 221 |
+
|
| 222 |
+
@torch.no_grad()
|
| 223 |
+
def decode(self, x_latent, cond, t_start, unconditional_guidance_scale=1.0, unconditional_conditioning=None,
|
| 224 |
+
use_original_steps=False):
|
| 225 |
+
|
| 226 |
+
timesteps = np.arange(self.ddpm_num_timesteps) if use_original_steps else self.ddim_timesteps
|
| 227 |
+
timesteps = timesteps[:t_start]
|
| 228 |
+
|
| 229 |
+
time_range = np.flip(timesteps)
|
| 230 |
+
total_steps = timesteps.shape[0]
|
| 231 |
+
print(f"Running DDIM Sampling with {total_steps} timesteps")
|
| 232 |
+
|
| 233 |
+
iterator = tqdm(time_range, desc='Decoding image', total=total_steps)
|
| 234 |
+
x_dec = x_latent
|
| 235 |
+
for i, step in enumerate(iterator):
|
| 236 |
+
index = total_steps - i - 1
|
| 237 |
+
ts = torch.full((x_latent.shape[0],), step, device=x_latent.device, dtype=torch.long)
|
| 238 |
+
x_dec, _ = self.p_sample_ddim(x_dec, cond, ts, index=index, use_original_steps=use_original_steps,
|
| 239 |
+
unconditional_guidance_scale=unconditional_guidance_scale,
|
| 240 |
+
unconditional_conditioning=unconditional_conditioning)
|
| 241 |
+
return x_dec
|
ldm/models/diffusion/ddpm.py
ADDED
|
@@ -0,0 +1,1446 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
"""
|
| 2 |
+
wild mixture of
|
| 3 |
+
https://github.com/lucidrains/denoising-diffusion-pytorch/blob/7706bdfc6f527f58d33f84b7b522e61e6e3164b3/denoising_diffusion_pytorch/denoising_diffusion_pytorch.py
|
| 4 |
+
https://github.com/openai/improved-diffusion/blob/e94489283bb876ac1477d5dd7709bbbd2d9902ce/improved_diffusion/gaussian_diffusion.py
|
| 5 |
+
https://github.com/CompVis/taming-transformers
|
| 6 |
+
-- merci
|
| 7 |
+
"""
|
| 8 |
+
|
| 9 |
+
import torch
|
| 10 |
+
import torch.nn as nn
|
| 11 |
+
import numpy as np
|
| 12 |
+
import pytorch_lightning as pl
|
| 13 |
+
from torch.optim.lr_scheduler import LambdaLR
|
| 14 |
+
from einops import rearrange, repeat
|
| 15 |
+
from contextlib import contextmanager
|
| 16 |
+
from functools import partial
|
| 17 |
+
from tqdm import tqdm
|
| 18 |
+
from torchvision.utils import make_grid
|
| 19 |
+
from pytorch_lightning.utilities.distributed import rank_zero_only
|
| 20 |
+
|
| 21 |
+
from ldm.util import log_txt_as_img, exists, default, ismap, isimage, mean_flat, count_params, instantiate_from_config
|
| 22 |
+
from ldm.modules.ema import LitEma
|
| 23 |
+
from ldm.modules.distributions.distributions import normal_kl, DiagonalGaussianDistribution
|
| 24 |
+
from ldm.models.autoencoder import VQModelInterface, IdentityFirstStage, AutoencoderKL
|
| 25 |
+
from ldm.modules.diffusionmodules.util import make_beta_schedule, extract_into_tensor, noise_like
|
| 26 |
+
from ldm.models.diffusion.ddim import DDIMSampler
|
| 27 |
+
|
| 28 |
+
|
| 29 |
+
__conditioning_keys__ = {'concat': 'c_concat',
|
| 30 |
+
'crossattn': 'c_crossattn',
|
| 31 |
+
'adm': 'y'}
|
| 32 |
+
|
| 33 |
+
|
| 34 |
+
def disabled_train(self, mode=True):
|
| 35 |
+
"""Overwrite model.train with this function to make sure train/eval mode
|
| 36 |
+
does not change anymore."""
|
| 37 |
+
return self
|
| 38 |
+
|
| 39 |
+
|
| 40 |
+
def uniform_on_device(r1, r2, shape, device):
|
| 41 |
+
return (r1 - r2) * torch.rand(*shape, device=device) + r2
|
| 42 |
+
|
| 43 |
+
|
| 44 |
+
class DDPM(pl.LightningModule):
|
| 45 |
+
# classic DDPM with Gaussian diffusion, in image space
|
| 46 |
+
def __init__(self,
|
| 47 |
+
unet_config,
|
| 48 |
+
timesteps=1000,
|
| 49 |
+
beta_schedule="linear",
|
| 50 |
+
loss_type="l2",
|
| 51 |
+
ckpt_path=None,
|
| 52 |
+
ignore_keys=[],
|
| 53 |
+
load_only_unet=False,
|
| 54 |
+
monitor="val/loss",
|
| 55 |
+
use_ema=True,
|
| 56 |
+
first_stage_key="image",
|
| 57 |
+
image_size=256,
|
| 58 |
+
channels=3,
|
| 59 |
+
log_every_t=100,
|
| 60 |
+
clip_denoised=True,
|
| 61 |
+
linear_start=1e-4,
|
| 62 |
+
linear_end=2e-2,
|
| 63 |
+
cosine_s=8e-3,
|
| 64 |
+
given_betas=None,
|
| 65 |
+
original_elbo_weight=0.,
|
| 66 |
+
v_posterior=0., # weight for choosing posterior variance as sigma = (1-v) * beta_tilde + v * beta
|
| 67 |
+
l_simple_weight=1.,
|
| 68 |
+
conditioning_key=None,
|
| 69 |
+
parameterization="eps", # all assuming fixed variance schedules
|
| 70 |
+
scheduler_config=None,
|
| 71 |
+
use_positional_encodings=False,
|
| 72 |
+
learn_logvar=False,
|
| 73 |
+
logvar_init=0.,
|
| 74 |
+
):
|
| 75 |
+
super().__init__()
|
| 76 |
+
assert parameterization in ["eps", "x0"], 'currently only supporting "eps" and "x0"'
|
| 77 |
+
self.parameterization = parameterization
|
| 78 |
+
print(f"{self.__class__.__name__}: Running in {self.parameterization}-prediction mode")
|
| 79 |
+
self.cond_stage_model = None
|
| 80 |
+
self.clip_denoised = clip_denoised
|
| 81 |
+
self.log_every_t = log_every_t
|
| 82 |
+
self.first_stage_key = first_stage_key
|
| 83 |
+
self.image_size = image_size # try conv?
|
| 84 |
+
self.channels = channels
|
| 85 |
+
self.use_positional_encodings = use_positional_encodings
|
| 86 |
+
self.model = DiffusionWrapper(unet_config, conditioning_key)
|
| 87 |
+
count_params(self.model, verbose=True)
|
| 88 |
+
self.use_ema = use_ema
|
| 89 |
+
if self.use_ema:
|
| 90 |
+
self.model_ema = LitEma(self.model)
|
| 91 |
+
print(f"Keeping EMAs of {len(list(self.model_ema.buffers()))}.")
|
| 92 |
+
|
| 93 |
+
self.use_scheduler = scheduler_config is not None
|
| 94 |
+
if self.use_scheduler:
|
| 95 |
+
self.scheduler_config = scheduler_config
|
| 96 |
+
|
| 97 |
+
self.v_posterior = v_posterior
|
| 98 |
+
self.original_elbo_weight = original_elbo_weight
|
| 99 |
+
self.l_simple_weight = l_simple_weight
|
| 100 |
+
|
| 101 |
+
if monitor is not None:
|
| 102 |
+
self.monitor = monitor
|
| 103 |
+
if ckpt_path is not None:
|
| 104 |
+
self.init_from_ckpt(ckpt_path, ignore_keys=ignore_keys, only_model=load_only_unet)
|
| 105 |
+
|
| 106 |
+
self.register_schedule(given_betas=given_betas, beta_schedule=beta_schedule, timesteps=timesteps,
|
| 107 |
+
linear_start=linear_start, linear_end=linear_end, cosine_s=cosine_s)
|
| 108 |
+
|
| 109 |
+
self.loss_type = loss_type
|
| 110 |
+
|
| 111 |
+
self.learn_logvar = learn_logvar
|
| 112 |
+
self.logvar = torch.full(fill_value=logvar_init, size=(self.num_timesteps,))
|
| 113 |
+
if self.learn_logvar:
|
| 114 |
+
self.logvar = nn.Parameter(self.logvar, requires_grad=True)
|
| 115 |
+
|
| 116 |
+
|
| 117 |
+
def register_schedule(self, given_betas=None, beta_schedule="linear", timesteps=1000,
|
| 118 |
+
linear_start=1e-4, linear_end=2e-2, cosine_s=8e-3):
|
| 119 |
+
if exists(given_betas):
|
| 120 |
+
betas = given_betas
|
| 121 |
+
else:
|
| 122 |
+
betas = make_beta_schedule(beta_schedule, timesteps, linear_start=linear_start, linear_end=linear_end,
|
| 123 |
+
cosine_s=cosine_s)
|
| 124 |
+
alphas = 1. - betas
|
| 125 |
+
alphas_cumprod = np.cumprod(alphas, axis=0)
|
| 126 |
+
alphas_cumprod_prev = np.append(1., alphas_cumprod[:-1])
|
| 127 |
+
|
| 128 |
+
timesteps, = betas.shape
|
| 129 |
+
self.num_timesteps = int(timesteps)
|
| 130 |
+
self.linear_start = linear_start
|
| 131 |
+
self.linear_end = linear_end
|
| 132 |
+
assert alphas_cumprod.shape[0] == self.num_timesteps, 'alphas have to be defined for each timestep'
|
| 133 |
+
|
| 134 |
+
to_torch = partial(torch.tensor, dtype=torch.float32)
|
| 135 |
+
|
| 136 |
+
self.register_buffer('betas', to_torch(betas))
|
| 137 |
+
self.register_buffer('alphas_cumprod', to_torch(alphas_cumprod))
|
| 138 |
+
self.register_buffer('alphas_cumprod_prev', to_torch(alphas_cumprod_prev))
|
| 139 |
+
|
| 140 |
+
# calculations for diffusion q(x_t | x_{t-1}) and others
|
| 141 |
+
self.register_buffer('sqrt_alphas_cumprod', to_torch(np.sqrt(alphas_cumprod)))
|
| 142 |
+
self.register_buffer('sqrt_one_minus_alphas_cumprod', to_torch(np.sqrt(1. - alphas_cumprod)))
|
| 143 |
+
self.register_buffer('log_one_minus_alphas_cumprod', to_torch(np.log(1. - alphas_cumprod)))
|
| 144 |
+
self.register_buffer('sqrt_recip_alphas_cumprod', to_torch(np.sqrt(1. / alphas_cumprod)))
|
| 145 |
+
self.register_buffer('sqrt_recipm1_alphas_cumprod', to_torch(np.sqrt(1. / alphas_cumprod - 1)))
|
| 146 |
+
|
| 147 |
+
# calculations for posterior q(x_{t-1} | x_t, x_0)
|
| 148 |
+
posterior_variance = (1 - self.v_posterior) * betas * (1. - alphas_cumprod_prev) / (
|
| 149 |
+
1. - alphas_cumprod) + self.v_posterior * betas
|
| 150 |
+
# above: equal to 1. / (1. / (1. - alpha_cumprod_tm1) + alpha_t / beta_t)
|
| 151 |
+
self.register_buffer('posterior_variance', to_torch(posterior_variance))
|
| 152 |
+
# below: log calculation clipped because the posterior variance is 0 at the beginning of the diffusion chain
|
| 153 |
+
self.register_buffer('posterior_log_variance_clipped', to_torch(np.log(np.maximum(posterior_variance, 1e-20))))
|
| 154 |
+
self.register_buffer('posterior_mean_coef1', to_torch(
|
| 155 |
+
betas * np.sqrt(alphas_cumprod_prev) / (1. - alphas_cumprod)))
|
| 156 |
+
self.register_buffer('posterior_mean_coef2', to_torch(
|
| 157 |
+
(1. - alphas_cumprod_prev) * np.sqrt(alphas) / (1. - alphas_cumprod)))
|
| 158 |
+
|
| 159 |
+
if self.parameterization == "eps":
|
| 160 |
+
lvlb_weights = self.betas ** 2 / (
|
| 161 |
+
2 * self.posterior_variance * to_torch(alphas) * (1 - self.alphas_cumprod))
|
| 162 |
+
elif self.parameterization == "x0":
|
| 163 |
+
lvlb_weights = 0.5 * np.sqrt(torch.Tensor(alphas_cumprod)) / (2. * 1 - torch.Tensor(alphas_cumprod))
|
| 164 |
+
else:
|
| 165 |
+
raise NotImplementedError("mu not supported")
|
| 166 |
+
# TODO how to choose this term
|
| 167 |
+
lvlb_weights[0] = lvlb_weights[1]
|
| 168 |
+
self.register_buffer('lvlb_weights', lvlb_weights, persistent=False)
|
| 169 |
+
assert not torch.isnan(self.lvlb_weights).all()
|
| 170 |
+
|
| 171 |
+
@contextmanager
|
| 172 |
+
def ema_scope(self, context=None):
|
| 173 |
+
if self.use_ema:
|
| 174 |
+
self.model_ema.store(self.model.parameters())
|
| 175 |
+
self.model_ema.copy_to(self.model)
|
| 176 |
+
if context is not None:
|
| 177 |
+
print(f"{context}: Switched to EMA weights")
|
| 178 |
+
try:
|
| 179 |
+
yield None
|
| 180 |
+
finally:
|
| 181 |
+
if self.use_ema:
|
| 182 |
+
self.model_ema.restore(self.model.parameters())
|
| 183 |
+
if context is not None:
|
| 184 |
+
print(f"{context}: Restored training weights")
|
| 185 |
+
|
| 186 |
+
def init_from_ckpt(self, path, ignore_keys=list(), only_model=False):
|
| 187 |
+
sd = torch.load(path, map_location="cpu")
|
| 188 |
+
if "state_dict" in list(sd.keys()):
|
| 189 |
+
sd = sd["state_dict"]
|
| 190 |
+
keys = list(sd.keys())
|
| 191 |
+
for k in keys:
|
| 192 |
+
for ik in ignore_keys:
|
| 193 |
+
if k.startswith(ik):
|
| 194 |
+
print("Deleting key {} from state_dict.".format(k))
|
| 195 |
+
del sd[k]
|
| 196 |
+
missing, unexpected = self.load_state_dict(sd, strict=False) if not only_model else self.model.load_state_dict(
|
| 197 |
+
sd, strict=False)
|
| 198 |
+
print(f"Restored from {path} with {len(missing)} missing and {len(unexpected)} unexpected keys")
|
| 199 |
+
if len(missing) > 0:
|
| 200 |
+
print(f"Missing Keys: {missing}")
|
| 201 |
+
if len(unexpected) > 0:
|
| 202 |
+
print(f"Unexpected Keys: {unexpected}")
|
| 203 |
+
|
| 204 |
+
def q_mean_variance(self, x_start, t):
|
| 205 |
+
"""
|
| 206 |
+
Get the distribution q(x_t | x_0).
|
| 207 |
+
:param x_start: the [N x C x ...] tensor of noiseless inputs.
|
| 208 |
+
:param t: the number of diffusion steps (minus 1). Here, 0 means one step.
|
| 209 |
+
:return: A tuple (mean, variance, log_variance), all of x_start's shape.
|
| 210 |
+
"""
|
| 211 |
+
mean = (extract_into_tensor(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start)
|
| 212 |
+
variance = extract_into_tensor(1.0 - self.alphas_cumprod, t, x_start.shape)
|
| 213 |
+
log_variance = extract_into_tensor(self.log_one_minus_alphas_cumprod, t, x_start.shape)
|
| 214 |
+
return mean, variance, log_variance
|
| 215 |
+
|
| 216 |
+
def predict_start_from_noise(self, x_t, t, noise):
|
| 217 |
+
return (
|
| 218 |
+
extract_into_tensor(self.sqrt_recip_alphas_cumprod, t, x_t.shape) * x_t -
|
| 219 |
+
extract_into_tensor(self.sqrt_recipm1_alphas_cumprod, t, x_t.shape) * noise
|
| 220 |
+
)
|
| 221 |
+
|
| 222 |
+
def q_posterior(self, x_start, x_t, t):
|
| 223 |
+
posterior_mean = (
|
| 224 |
+
extract_into_tensor(self.posterior_mean_coef1, t, x_t.shape) * x_start +
|
| 225 |
+
extract_into_tensor(self.posterior_mean_coef2, t, x_t.shape) * x_t
|
| 226 |
+
)
|
| 227 |
+
posterior_variance = extract_into_tensor(self.posterior_variance, t, x_t.shape)
|
| 228 |
+
posterior_log_variance_clipped = extract_into_tensor(self.posterior_log_variance_clipped, t, x_t.shape)
|
| 229 |
+
return posterior_mean, posterior_variance, posterior_log_variance_clipped
|
| 230 |
+
|
| 231 |
+
def p_mean_variance(self, x, t, clip_denoised: bool):
|
| 232 |
+
model_out = self.model(x, t)
|
| 233 |
+
if self.parameterization == "eps":
|
| 234 |
+
x_recon = self.predict_start_from_noise(x, t=t, noise=model_out)
|
| 235 |
+
elif self.parameterization == "x0":
|
| 236 |
+
x_recon = model_out
|
| 237 |
+
if clip_denoised:
|
| 238 |
+
x_recon.clamp_(-1., 1.)
|
| 239 |
+
|
| 240 |
+
model_mean, posterior_variance, posterior_log_variance = self.q_posterior(x_start=x_recon, x_t=x, t=t)
|
| 241 |
+
return model_mean, posterior_variance, posterior_log_variance
|
| 242 |
+
|
| 243 |
+
@torch.no_grad()
|
| 244 |
+
def p_sample(self, x, t, clip_denoised=True, repeat_noise=False):
|
| 245 |
+
b, *_, device = *x.shape, x.device
|
| 246 |
+
model_mean, _, model_log_variance = self.p_mean_variance(x=x, t=t, clip_denoised=clip_denoised)
|
| 247 |
+
noise = noise_like(x.shape, device, repeat_noise)
|
| 248 |
+
# no noise when t == 0
|
| 249 |
+
nonzero_mask = (1 - (t == 0).float()).reshape(b, *((1,) * (len(x.shape) - 1)))
|
| 250 |
+
return model_mean + nonzero_mask * (0.5 * model_log_variance).exp() * noise
|
| 251 |
+
|
| 252 |
+
@torch.no_grad()
|
| 253 |
+
def p_sample_loop(self, shape, return_intermediates=False):
|
| 254 |
+
device = self.betas.device
|
| 255 |
+
b = shape[0]
|
| 256 |
+
img = torch.randn(shape, device=device)
|
| 257 |
+
intermediates = [img]
|
| 258 |
+
for i in tqdm(reversed(range(0, self.num_timesteps)), desc='Sampling t', total=self.num_timesteps):
|
| 259 |
+
img = self.p_sample(img, torch.full((b,), i, device=device, dtype=torch.long),
|
| 260 |
+
clip_denoised=self.clip_denoised)
|
| 261 |
+
if i % self.log_every_t == 0 or i == self.num_timesteps - 1:
|
| 262 |
+
intermediates.append(img)
|
| 263 |
+
if return_intermediates:
|
| 264 |
+
return img, intermediates
|
| 265 |
+
return img
|
| 266 |
+
|
| 267 |
+
@torch.no_grad()
|
| 268 |
+
def sample(self, batch_size=16, return_intermediates=False):
|
| 269 |
+
image_size = self.image_size
|
| 270 |
+
channels = self.channels
|
| 271 |
+
return self.p_sample_loop((batch_size, channels, image_size, image_size),
|
| 272 |
+
return_intermediates=return_intermediates)
|
| 273 |
+
|
| 274 |
+
def q_sample(self, x_start, t, noise=None):
|
| 275 |
+
noise = default(noise, lambda: torch.randn_like(x_start))
|
| 276 |
+
return (extract_into_tensor(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start +
|
| 277 |
+
extract_into_tensor(self.sqrt_one_minus_alphas_cumprod, t, x_start.shape) * noise)
|
| 278 |
+
|
| 279 |
+
def get_loss(self, pred, target, mean=True):
|
| 280 |
+
if self.loss_type == 'l1':
|
| 281 |
+
loss = (target - pred).abs()
|
| 282 |
+
if mean:
|
| 283 |
+
loss = loss.mean()
|
| 284 |
+
elif self.loss_type == 'l2':
|
| 285 |
+
if mean:
|
| 286 |
+
loss = torch.nn.functional.mse_loss(target, pred)
|
| 287 |
+
else:
|
| 288 |
+
loss = torch.nn.functional.mse_loss(target, pred, reduction='none')
|
| 289 |
+
else:
|
| 290 |
+
raise NotImplementedError("unknown loss type '{loss_type}'")
|
| 291 |
+
|
| 292 |
+
return loss
|
| 293 |
+
|
| 294 |
+
def p_losses(self, x_start, t, noise=None):
|
| 295 |
+
noise = default(noise, lambda: torch.randn_like(x_start))
|
| 296 |
+
x_noisy = self.q_sample(x_start=x_start, t=t, noise=noise)
|
| 297 |
+
model_out = self.model(x_noisy, t)
|
| 298 |
+
|
| 299 |
+
loss_dict = {}
|
| 300 |
+
if self.parameterization == "eps":
|
| 301 |
+
target = noise
|
| 302 |
+
elif self.parameterization == "x0":
|
| 303 |
+
target = x_start
|
| 304 |
+
else:
|
| 305 |
+
raise NotImplementedError(f"Parameterization {self.parameterization} not yet supported")
|
| 306 |
+
|
| 307 |
+
loss = self.get_loss(model_out, target, mean=False).mean(dim=[1, 2, 3])
|
| 308 |
+
|
| 309 |
+
log_prefix = 'train' if self.training else 'val'
|
| 310 |
+
|
| 311 |
+
loss_dict.update({f'{log_prefix}/loss_simple': loss.mean()})
|
| 312 |
+
loss_simple = loss.mean() * self.l_simple_weight
|
| 313 |
+
|
| 314 |
+
loss_vlb = (self.lvlb_weights[t] * loss).mean()
|
| 315 |
+
loss_dict.update({f'{log_prefix}/loss_vlb': loss_vlb})
|
| 316 |
+
|
| 317 |
+
loss = loss_simple + self.original_elbo_weight * loss_vlb
|
| 318 |
+
|
| 319 |
+
loss_dict.update({f'{log_prefix}/loss': loss})
|
| 320 |
+
|
| 321 |
+
return loss, loss_dict
|
| 322 |
+
|
| 323 |
+
def forward(self, x, *args, **kwargs):
|
| 324 |
+
# b, c, h, w, device, img_size, = *x.shape, x.device, self.image_size
|
| 325 |
+
# assert h == img_size and w == img_size, f'height and width of image must be {img_size}'
|
| 326 |
+
t = torch.randint(0, self.num_timesteps, (x.shape[0],), device=self.device).long()
|
| 327 |
+
return self.p_losses(x, t, *args, **kwargs)
|
| 328 |
+
|
| 329 |
+
def get_input(self, batch, k):
|
| 330 |
+
x = batch[k]
|
| 331 |
+
if len(x.shape) == 3:
|
| 332 |
+
x = x[..., None]
|
| 333 |
+
x = rearrange(x, 'b h w c -> b c h w')
|
| 334 |
+
x = x.to(memory_format=torch.contiguous_format).float()
|
| 335 |
+
return x
|
| 336 |
+
|
| 337 |
+
def shared_step(self, batch):
|
| 338 |
+
x = self.get_input(batch, self.first_stage_key)
|
| 339 |
+
loss, loss_dict = self(x)
|
| 340 |
+
return loss, loss_dict
|
| 341 |
+
|
| 342 |
+
def training_step(self, batch, batch_idx):
|
| 343 |
+
loss, loss_dict = self.shared_step(batch)
|
| 344 |
+
|
| 345 |
+
self.log_dict(loss_dict, prog_bar=True,
|
| 346 |
+
logger=True, on_step=True, on_epoch=True)
|
| 347 |
+
|
| 348 |
+
self.log("global_step", self.global_step,
|
| 349 |
+
prog_bar=True, logger=True, on_step=True, on_epoch=False)
|
| 350 |
+
|
| 351 |
+
if self.use_scheduler:
|
| 352 |
+
lr = self.optimizers().param_groups[0]['lr']
|
| 353 |
+
self.log('lr_abs', lr, prog_bar=True, logger=True, on_step=True, on_epoch=False)
|
| 354 |
+
|
| 355 |
+
return loss
|
| 356 |
+
|
| 357 |
+
@torch.no_grad()
|
| 358 |
+
def validation_step(self, batch, batch_idx):
|
| 359 |
+
_, loss_dict_no_ema = self.shared_step(batch)
|
| 360 |
+
with self.ema_scope():
|
| 361 |
+
_, loss_dict_ema = self.shared_step(batch)
|
| 362 |
+
loss_dict_ema = {key + '_ema': loss_dict_ema[key] for key in loss_dict_ema}
|
| 363 |
+
self.log_dict(loss_dict_no_ema, prog_bar=False, logger=True, on_step=False, on_epoch=True)
|
| 364 |
+
self.log_dict(loss_dict_ema, prog_bar=False, logger=True, on_step=False, on_epoch=True)
|
| 365 |
+
|
| 366 |
+
def on_train_batch_end(self, *args, **kwargs):
|
| 367 |
+
if self.use_ema:
|
| 368 |
+
self.model_ema(self.model)
|
| 369 |
+
|
| 370 |
+
def _get_rows_from_list(self, samples):
|
| 371 |
+
n_imgs_per_row = len(samples)
|
| 372 |
+
denoise_grid = rearrange(samples, 'n b c h w -> b n c h w')
|
| 373 |
+
denoise_grid = rearrange(denoise_grid, 'b n c h w -> (b n) c h w')
|
| 374 |
+
denoise_grid = make_grid(denoise_grid, nrow=n_imgs_per_row)
|
| 375 |
+
return denoise_grid
|
| 376 |
+
|
| 377 |
+
@torch.no_grad()
|
| 378 |
+
def log_images(self, batch, N=8, n_row=2, sample=True, return_keys=None, **kwargs):
|
| 379 |
+
log = dict()
|
| 380 |
+
x = self.get_input(batch, self.first_stage_key)
|
| 381 |
+
N = min(x.shape[0], N)
|
| 382 |
+
n_row = min(x.shape[0], n_row)
|
| 383 |
+
x = x.to(self.device)[:N]
|
| 384 |
+
log["inputs"] = x
|
| 385 |
+
|
| 386 |
+
# get diffusion row
|
| 387 |
+
diffusion_row = list()
|
| 388 |
+
x_start = x[:n_row]
|
| 389 |
+
|
| 390 |
+
for t in range(self.num_timesteps):
|
| 391 |
+
if t % self.log_every_t == 0 or t == self.num_timesteps - 1:
|
| 392 |
+
t = repeat(torch.tensor([t]), '1 -> b', b=n_row)
|
| 393 |
+
t = t.to(self.device).long()
|
| 394 |
+
noise = torch.randn_like(x_start)
|
| 395 |
+
x_noisy = self.q_sample(x_start=x_start, t=t, noise=noise)
|
| 396 |
+
diffusion_row.append(x_noisy)
|
| 397 |
+
|
| 398 |
+
log["diffusion_row"] = self._get_rows_from_list(diffusion_row)
|
| 399 |
+
|
| 400 |
+
if sample:
|
| 401 |
+
# get denoise row
|
| 402 |
+
with self.ema_scope("Plotting"):
|
| 403 |
+
samples, denoise_row = self.sample(batch_size=N, return_intermediates=True)
|
| 404 |
+
|
| 405 |
+
log["samples"] = samples
|
| 406 |
+
log["denoise_row"] = self._get_rows_from_list(denoise_row)
|
| 407 |
+
|
| 408 |
+
if return_keys:
|
| 409 |
+
if np.intersect1d(list(log.keys()), return_keys).shape[0] == 0:
|
| 410 |
+
return log
|
| 411 |
+
else:
|
| 412 |
+
return {key: log[key] for key in return_keys}
|
| 413 |
+
return log
|
| 414 |
+
|
| 415 |
+
def configure_optimizers(self):
|
| 416 |
+
lr = self.learning_rate
|
| 417 |
+
params = list(self.model.parameters())
|
| 418 |
+
if self.learn_logvar:
|
| 419 |
+
params = params + [self.logvar]
|
| 420 |
+
opt = torch.optim.AdamW(params, lr=lr)
|
| 421 |
+
return opt
|
| 422 |
+
|
| 423 |
+
|
| 424 |
+
class DiffusionWrapper(pl.LightningModule):
|
| 425 |
+
def __init__(self, diff_model_config, conditioning_key):
|
| 426 |
+
super().__init__()
|
| 427 |
+
self.diffusion_model = instantiate_from_config(diff_model_config)
|
| 428 |
+
self.conditioning_key = conditioning_key
|
| 429 |
+
assert self.conditioning_key in [None, 'concat', 'crossattn', 'hybrid', 'adm']
|
| 430 |
+
|
| 431 |
+
def forward(self, x, t, c_concat: list = None, c_crossattn: list = None, features_adapter=None):
|
| 432 |
+
if self.conditioning_key is None:
|
| 433 |
+
out = self.diffusion_model(x, t, features_adapter=features_adapter)
|
| 434 |
+
elif self.conditioning_key == 'concat':
|
| 435 |
+
xc = torch.cat([x] + c_concat, dim=1)
|
| 436 |
+
out = self.diffusion_model(xc, t, features_adapter=features_adapter)
|
| 437 |
+
elif self.conditioning_key == 'crossattn':
|
| 438 |
+
cc = torch.cat(c_crossattn, 1)
|
| 439 |
+
out = self.diffusion_model(x, t, context=cc, features_adapter=features_adapter)
|
| 440 |
+
elif self.conditioning_key == 'hybrid':
|
| 441 |
+
xc = torch.cat([x] + c_concat, dim=1)
|
| 442 |
+
cc = torch.cat(c_crossattn, 1)
|
| 443 |
+
out = self.diffusion_model(xc, t, context=cc, features_adapter=features_adapter)
|
| 444 |
+
elif self.conditioning_key == 'adm':
|
| 445 |
+
cc = c_crossattn[0]
|
| 446 |
+
out = self.diffusion_model(x, t, y=cc, features_adapter=features_adapter)
|
| 447 |
+
else:
|
| 448 |
+
raise NotImplementedError()
|
| 449 |
+
|
| 450 |
+
return out
|
| 451 |
+
|
| 452 |
+
|
| 453 |
+
class LatentDiffusion(DDPM):
|
| 454 |
+
"""main class"""
|
| 455 |
+
def __init__(self,
|
| 456 |
+
first_stage_config,
|
| 457 |
+
cond_stage_config,
|
| 458 |
+
unet_config,
|
| 459 |
+
num_timesteps_cond=None,
|
| 460 |
+
cond_stage_key="image",
|
| 461 |
+
cond_stage_trainable=False,
|
| 462 |
+
concat_mode=True,
|
| 463 |
+
cond_stage_forward=None,
|
| 464 |
+
conditioning_key=None,
|
| 465 |
+
scale_factor=1.0,
|
| 466 |
+
scale_by_std=False,
|
| 467 |
+
*args, **kwargs):
|
| 468 |
+
self.num_timesteps_cond = default(num_timesteps_cond, 1)
|
| 469 |
+
self.scale_by_std = scale_by_std
|
| 470 |
+
assert self.num_timesteps_cond <= kwargs['timesteps']
|
| 471 |
+
# for backwards compatibility after implementation of DiffusionWrapper
|
| 472 |
+
if conditioning_key is None:
|
| 473 |
+
conditioning_key = 'concat' if concat_mode else 'crossattn'
|
| 474 |
+
if cond_stage_config == '__is_unconditional__':
|
| 475 |
+
conditioning_key = None
|
| 476 |
+
ckpt_path = kwargs.pop("ckpt_path", None)
|
| 477 |
+
ignore_keys = kwargs.pop("ignore_keys", [])
|
| 478 |
+
super().__init__(conditioning_key=conditioning_key, unet_config=unet_config, *args, **kwargs)
|
| 479 |
+
self.model = DiffusionWrapper(unet_config, conditioning_key)
|
| 480 |
+
self.concat_mode = concat_mode
|
| 481 |
+
self.cond_stage_trainable = cond_stage_trainable
|
| 482 |
+
self.cond_stage_key = cond_stage_key
|
| 483 |
+
try:
|
| 484 |
+
self.num_downs = len(first_stage_config.params.ddconfig.ch_mult) - 1
|
| 485 |
+
except:
|
| 486 |
+
self.num_downs = 0
|
| 487 |
+
if not scale_by_std:
|
| 488 |
+
self.scale_factor = scale_factor
|
| 489 |
+
else:
|
| 490 |
+
self.register_buffer('scale_factor', torch.tensor(scale_factor))
|
| 491 |
+
self.instantiate_first_stage(first_stage_config)
|
| 492 |
+
self.instantiate_cond_stage(cond_stage_config)
|
| 493 |
+
self.cond_stage_forward = cond_stage_forward
|
| 494 |
+
self.clip_denoised = False
|
| 495 |
+
self.bbox_tokenizer = None
|
| 496 |
+
|
| 497 |
+
self.restarted_from_ckpt = False
|
| 498 |
+
if ckpt_path is not None:
|
| 499 |
+
self.init_from_ckpt(ckpt_path, ignore_keys)
|
| 500 |
+
self.restarted_from_ckpt = True
|
| 501 |
+
|
| 502 |
+
def make_cond_schedule(self, ):
|
| 503 |
+
self.cond_ids = torch.full(size=(self.num_timesteps,), fill_value=self.num_timesteps - 1, dtype=torch.long)
|
| 504 |
+
ids = torch.round(torch.linspace(0, self.num_timesteps - 1, self.num_timesteps_cond)).long()
|
| 505 |
+
self.cond_ids[:self.num_timesteps_cond] = ids
|
| 506 |
+
|
| 507 |
+
@rank_zero_only
|
| 508 |
+
@torch.no_grad()
|
| 509 |
+
def on_train_batch_start(self, batch, batch_idx, dataloader_idx):
|
| 510 |
+
# only for very first batch
|
| 511 |
+
if self.scale_by_std and self.current_epoch == 0 and self.global_step == 0 and batch_idx == 0 and not self.restarted_from_ckpt:
|
| 512 |
+
assert self.scale_factor == 1., 'rather not use custom rescaling and std-rescaling simultaneously'
|
| 513 |
+
# set rescale weight to 1./std of encodings
|
| 514 |
+
print("### USING STD-RESCALING ###")
|
| 515 |
+
x = super().get_input(batch, self.first_stage_key)
|
| 516 |
+
x = x.to(self.device)
|
| 517 |
+
encoder_posterior = self.encode_first_stage(x)
|
| 518 |
+
z = self.get_first_stage_encoding(encoder_posterior).detach()
|
| 519 |
+
del self.scale_factor
|
| 520 |
+
self.register_buffer('scale_factor', 1. / z.flatten().std())
|
| 521 |
+
print(f"setting self.scale_factor to {self.scale_factor}")
|
| 522 |
+
print("### USING STD-RESCALING ###")
|
| 523 |
+
|
| 524 |
+
def register_schedule(self,
|
| 525 |
+
given_betas=None, beta_schedule="linear", timesteps=1000,
|
| 526 |
+
linear_start=1e-4, linear_end=2e-2, cosine_s=8e-3):
|
| 527 |
+
super().register_schedule(given_betas, beta_schedule, timesteps, linear_start, linear_end, cosine_s)
|
| 528 |
+
|
| 529 |
+
self.shorten_cond_schedule = self.num_timesteps_cond > 1
|
| 530 |
+
if self.shorten_cond_schedule:
|
| 531 |
+
self.make_cond_schedule()
|
| 532 |
+
|
| 533 |
+
def instantiate_first_stage(self, config):
|
| 534 |
+
model = instantiate_from_config(config)
|
| 535 |
+
self.first_stage_model = model.eval()
|
| 536 |
+
self.first_stage_model.train = disabled_train
|
| 537 |
+
for param in self.first_stage_model.parameters():
|
| 538 |
+
param.requires_grad = False
|
| 539 |
+
|
| 540 |
+
def instantiate_cond_stage(self, config):
|
| 541 |
+
if not self.cond_stage_trainable:
|
| 542 |
+
if config == "__is_first_stage__":
|
| 543 |
+
print("Using first stage also as cond stage.")
|
| 544 |
+
self.cond_stage_model = self.first_stage_model
|
| 545 |
+
elif config == "__is_unconditional__":
|
| 546 |
+
print(f"Training {self.__class__.__name__} as an unconditional model.")
|
| 547 |
+
self.cond_stage_model = None
|
| 548 |
+
# self.be_unconditional = True
|
| 549 |
+
else:
|
| 550 |
+
model = instantiate_from_config(config)
|
| 551 |
+
self.cond_stage_model = model.eval()
|
| 552 |
+
self.cond_stage_model.train = disabled_train
|
| 553 |
+
for param in self.cond_stage_model.parameters():
|
| 554 |
+
param.requires_grad = False
|
| 555 |
+
else:
|
| 556 |
+
assert config != '__is_first_stage__'
|
| 557 |
+
assert config != '__is_unconditional__'
|
| 558 |
+
model = instantiate_from_config(config)
|
| 559 |
+
self.cond_stage_model = model
|
| 560 |
+
|
| 561 |
+
def _get_denoise_row_from_list(self, samples, desc='', force_no_decoder_quantization=False):
|
| 562 |
+
denoise_row = []
|
| 563 |
+
for zd in tqdm(samples, desc=desc):
|
| 564 |
+
denoise_row.append(self.decode_first_stage(zd.to(self.device),
|
| 565 |
+
force_not_quantize=force_no_decoder_quantization))
|
| 566 |
+
n_imgs_per_row = len(denoise_row)
|
| 567 |
+
denoise_row = torch.stack(denoise_row) # n_log_step, n_row, C, H, W
|
| 568 |
+
denoise_grid = rearrange(denoise_row, 'n b c h w -> b n c h w')
|
| 569 |
+
denoise_grid = rearrange(denoise_grid, 'b n c h w -> (b n) c h w')
|
| 570 |
+
denoise_grid = make_grid(denoise_grid, nrow=n_imgs_per_row)
|
| 571 |
+
return denoise_grid
|
| 572 |
+
|
| 573 |
+
def get_first_stage_encoding(self, encoder_posterior):
|
| 574 |
+
if isinstance(encoder_posterior, DiagonalGaussianDistribution):
|
| 575 |
+
z = encoder_posterior.sample()
|
| 576 |
+
elif isinstance(encoder_posterior, torch.Tensor):
|
| 577 |
+
z = encoder_posterior
|
| 578 |
+
else:
|
| 579 |
+
raise NotImplementedError(f"encoder_posterior of type '{type(encoder_posterior)}' not yet implemented")
|
| 580 |
+
return self.scale_factor * z
|
| 581 |
+
|
| 582 |
+
def get_learned_conditioning(self, c):
|
| 583 |
+
if self.cond_stage_forward is None:
|
| 584 |
+
if hasattr(self.cond_stage_model, 'encode') and callable(self.cond_stage_model.encode):
|
| 585 |
+
c = self.cond_stage_model.encode(c)
|
| 586 |
+
if isinstance(c, DiagonalGaussianDistribution):
|
| 587 |
+
c = c.mode()
|
| 588 |
+
else:
|
| 589 |
+
c = self.cond_stage_model(c)
|
| 590 |
+
else:
|
| 591 |
+
assert hasattr(self.cond_stage_model, self.cond_stage_forward)
|
| 592 |
+
c = getattr(self.cond_stage_model, self.cond_stage_forward)(c)
|
| 593 |
+
return c
|
| 594 |
+
|
| 595 |
+
def meshgrid(self, h, w):
|
| 596 |
+
y = torch.arange(0, h).view(h, 1, 1).repeat(1, w, 1)
|
| 597 |
+
x = torch.arange(0, w).view(1, w, 1).repeat(h, 1, 1)
|
| 598 |
+
|
| 599 |
+
arr = torch.cat([y, x], dim=-1)
|
| 600 |
+
return arr
|
| 601 |
+
|
| 602 |
+
def delta_border(self, h, w):
|
| 603 |
+
"""
|
| 604 |
+
:param h: height
|
| 605 |
+
:param w: width
|
| 606 |
+
:return: normalized distance to image border,
|
| 607 |
+
wtith min distance = 0 at border and max dist = 0.5 at image center
|
| 608 |
+
"""
|
| 609 |
+
lower_right_corner = torch.tensor([h - 1, w - 1]).view(1, 1, 2)
|
| 610 |
+
arr = self.meshgrid(h, w) / lower_right_corner
|
| 611 |
+
dist_left_up = torch.min(arr, dim=-1, keepdims=True)[0]
|
| 612 |
+
dist_right_down = torch.min(1 - arr, dim=-1, keepdims=True)[0]
|
| 613 |
+
edge_dist = torch.min(torch.cat([dist_left_up, dist_right_down], dim=-1), dim=-1)[0]
|
| 614 |
+
return edge_dist
|
| 615 |
+
|
| 616 |
+
def get_weighting(self, h, w, Ly, Lx, device):
|
| 617 |
+
weighting = self.delta_border(h, w)
|
| 618 |
+
weighting = torch.clip(weighting, self.split_input_params["clip_min_weight"],
|
| 619 |
+
self.split_input_params["clip_max_weight"], )
|
| 620 |
+
weighting = weighting.view(1, h * w, 1).repeat(1, 1, Ly * Lx).to(device)
|
| 621 |
+
|
| 622 |
+
if self.split_input_params["tie_braker"]:
|
| 623 |
+
L_weighting = self.delta_border(Ly, Lx)
|
| 624 |
+
L_weighting = torch.clip(L_weighting,
|
| 625 |
+
self.split_input_params["clip_min_tie_weight"],
|
| 626 |
+
self.split_input_params["clip_max_tie_weight"])
|
| 627 |
+
|
| 628 |
+
L_weighting = L_weighting.view(1, 1, Ly * Lx).to(device)
|
| 629 |
+
weighting = weighting * L_weighting
|
| 630 |
+
return weighting
|
| 631 |
+
|
| 632 |
+
def get_fold_unfold(self, x, kernel_size, stride, uf=1, df=1): # todo load once not every time, shorten code
|
| 633 |
+
"""
|
| 634 |
+
:param x: img of size (bs, c, h, w)
|
| 635 |
+
:return: n img crops of size (n, bs, c, kernel_size[0], kernel_size[1])
|
| 636 |
+
"""
|
| 637 |
+
bs, nc, h, w = x.shape
|
| 638 |
+
|
| 639 |
+
# number of crops in image
|
| 640 |
+
Ly = (h - kernel_size[0]) // stride[0] + 1
|
| 641 |
+
Lx = (w - kernel_size[1]) // stride[1] + 1
|
| 642 |
+
|
| 643 |
+
if uf == 1 and df == 1:
|
| 644 |
+
fold_params = dict(kernel_size=kernel_size, dilation=1, padding=0, stride=stride)
|
| 645 |
+
unfold = torch.nn.Unfold(**fold_params)
|
| 646 |
+
|
| 647 |
+
fold = torch.nn.Fold(output_size=x.shape[2:], **fold_params)
|
| 648 |
+
|
| 649 |
+
weighting = self.get_weighting(kernel_size[0], kernel_size[1], Ly, Lx, x.device).to(x.dtype)
|
| 650 |
+
normalization = fold(weighting).view(1, 1, h, w) # normalizes the overlap
|
| 651 |
+
weighting = weighting.view((1, 1, kernel_size[0], kernel_size[1], Ly * Lx))
|
| 652 |
+
|
| 653 |
+
elif uf > 1 and df == 1:
|
| 654 |
+
fold_params = dict(kernel_size=kernel_size, dilation=1, padding=0, stride=stride)
|
| 655 |
+
unfold = torch.nn.Unfold(**fold_params)
|
| 656 |
+
|
| 657 |
+
fold_params2 = dict(kernel_size=(kernel_size[0] * uf, kernel_size[0] * uf),
|
| 658 |
+
dilation=1, padding=0,
|
| 659 |
+
stride=(stride[0] * uf, stride[1] * uf))
|
| 660 |
+
fold = torch.nn.Fold(output_size=(x.shape[2] * uf, x.shape[3] * uf), **fold_params2)
|
| 661 |
+
|
| 662 |
+
weighting = self.get_weighting(kernel_size[0] * uf, kernel_size[1] * uf, Ly, Lx, x.device).to(x.dtype)
|
| 663 |
+
normalization = fold(weighting).view(1, 1, h * uf, w * uf) # normalizes the overlap
|
| 664 |
+
weighting = weighting.view((1, 1, kernel_size[0] * uf, kernel_size[1] * uf, Ly * Lx))
|
| 665 |
+
|
| 666 |
+
elif df > 1 and uf == 1:
|
| 667 |
+
fold_params = dict(kernel_size=kernel_size, dilation=1, padding=0, stride=stride)
|
| 668 |
+
unfold = torch.nn.Unfold(**fold_params)
|
| 669 |
+
|
| 670 |
+
fold_params2 = dict(kernel_size=(kernel_size[0] // df, kernel_size[0] // df),
|
| 671 |
+
dilation=1, padding=0,
|
| 672 |
+
stride=(stride[0] // df, stride[1] // df))
|
| 673 |
+
fold = torch.nn.Fold(output_size=(x.shape[2] // df, x.shape[3] // df), **fold_params2)
|
| 674 |
+
|
| 675 |
+
weighting = self.get_weighting(kernel_size[0] // df, kernel_size[1] // df, Ly, Lx, x.device).to(x.dtype)
|
| 676 |
+
normalization = fold(weighting).view(1, 1, h // df, w // df) # normalizes the overlap
|
| 677 |
+
weighting = weighting.view((1, 1, kernel_size[0] // df, kernel_size[1] // df, Ly * Lx))
|
| 678 |
+
|
| 679 |
+
else:
|
| 680 |
+
raise NotImplementedError
|
| 681 |
+
|
| 682 |
+
return fold, unfold, normalization, weighting
|
| 683 |
+
|
| 684 |
+
@torch.no_grad()
|
| 685 |
+
def get_input(self, batch, k, return_first_stage_outputs=False, force_c_encode=False,
|
| 686 |
+
cond_key=None, return_original_cond=False, bs=None):
|
| 687 |
+
x = super().get_input(batch, k)
|
| 688 |
+
if bs is not None:
|
| 689 |
+
x = x[:bs]
|
| 690 |
+
x = x.to(self.device)
|
| 691 |
+
encoder_posterior = self.encode_first_stage(x)
|
| 692 |
+
z = self.get_first_stage_encoding(encoder_posterior).detach()
|
| 693 |
+
|
| 694 |
+
if self.model.conditioning_key is not None:
|
| 695 |
+
if cond_key is None:
|
| 696 |
+
cond_key = self.cond_stage_key
|
| 697 |
+
if cond_key != self.first_stage_key:
|
| 698 |
+
if cond_key in ['caption', 'coordinates_bbox']:
|
| 699 |
+
xc = batch[cond_key]
|
| 700 |
+
elif cond_key == 'class_label':
|
| 701 |
+
xc = batch
|
| 702 |
+
else:
|
| 703 |
+
xc = super().get_input(batch, cond_key).to(self.device)
|
| 704 |
+
else:
|
| 705 |
+
xc = x
|
| 706 |
+
if not self.cond_stage_trainable or force_c_encode:
|
| 707 |
+
if isinstance(xc, dict) or isinstance(xc, list):
|
| 708 |
+
# import pudb; pudb.set_trace()
|
| 709 |
+
c = self.get_learned_conditioning(xc)
|
| 710 |
+
else:
|
| 711 |
+
c = self.get_learned_conditioning(xc.to(self.device))
|
| 712 |
+
else:
|
| 713 |
+
c = xc
|
| 714 |
+
if bs is not None:
|
| 715 |
+
c = c[:bs]
|
| 716 |
+
|
| 717 |
+
if self.use_positional_encodings:
|
| 718 |
+
pos_x, pos_y = self.compute_latent_shifts(batch)
|
| 719 |
+
ckey = __conditioning_keys__[self.model.conditioning_key]
|
| 720 |
+
c = {ckey: c, 'pos_x': pos_x, 'pos_y': pos_y}
|
| 721 |
+
|
| 722 |
+
else:
|
| 723 |
+
c = None
|
| 724 |
+
xc = None
|
| 725 |
+
if self.use_positional_encodings:
|
| 726 |
+
pos_x, pos_y = self.compute_latent_shifts(batch)
|
| 727 |
+
c = {'pos_x': pos_x, 'pos_y': pos_y}
|
| 728 |
+
out = [z, c]
|
| 729 |
+
if return_first_stage_outputs:
|
| 730 |
+
xrec = self.decode_first_stage(z)
|
| 731 |
+
out.extend([x, xrec])
|
| 732 |
+
if return_original_cond:
|
| 733 |
+
out.append(xc)
|
| 734 |
+
return out
|
| 735 |
+
|
| 736 |
+
@torch.no_grad()
|
| 737 |
+
def decode_first_stage(self, z, predict_cids=False, force_not_quantize=False):
|
| 738 |
+
if predict_cids:
|
| 739 |
+
if z.dim() == 4:
|
| 740 |
+
z = torch.argmax(z.exp(), dim=1).long()
|
| 741 |
+
z = self.first_stage_model.quantize.get_codebook_entry(z, shape=None)
|
| 742 |
+
z = rearrange(z, 'b h w c -> b c h w').contiguous()
|
| 743 |
+
|
| 744 |
+
z = 1. / self.scale_factor * z
|
| 745 |
+
|
| 746 |
+
if hasattr(self, "split_input_params"):
|
| 747 |
+
if self.split_input_params["patch_distributed_vq"]:
|
| 748 |
+
ks = self.split_input_params["ks"] # eg. (128, 128)
|
| 749 |
+
stride = self.split_input_params["stride"] # eg. (64, 64)
|
| 750 |
+
uf = self.split_input_params["vqf"]
|
| 751 |
+
bs, nc, h, w = z.shape
|
| 752 |
+
if ks[0] > h or ks[1] > w:
|
| 753 |
+
ks = (min(ks[0], h), min(ks[1], w))
|
| 754 |
+
print("reducing Kernel")
|
| 755 |
+
|
| 756 |
+
if stride[0] > h or stride[1] > w:
|
| 757 |
+
stride = (min(stride[0], h), min(stride[1], w))
|
| 758 |
+
print("reducing stride")
|
| 759 |
+
|
| 760 |
+
fold, unfold, normalization, weighting = self.get_fold_unfold(z, ks, stride, uf=uf)
|
| 761 |
+
|
| 762 |
+
z = unfold(z) # (bn, nc * prod(**ks), L)
|
| 763 |
+
# 1. Reshape to img shape
|
| 764 |
+
z = z.view((z.shape[0], -1, ks[0], ks[1], z.shape[-1])) # (bn, nc, ks[0], ks[1], L )
|
| 765 |
+
|
| 766 |
+
# 2. apply model loop over last dim
|
| 767 |
+
if isinstance(self.first_stage_model, VQModelInterface):
|
| 768 |
+
output_list = [self.first_stage_model.decode(z[:, :, :, :, i],
|
| 769 |
+
force_not_quantize=predict_cids or force_not_quantize)
|
| 770 |
+
for i in range(z.shape[-1])]
|
| 771 |
+
else:
|
| 772 |
+
|
| 773 |
+
output_list = [self.first_stage_model.decode(z[:, :, :, :, i])
|
| 774 |
+
for i in range(z.shape[-1])]
|
| 775 |
+
|
| 776 |
+
o = torch.stack(output_list, axis=-1) # # (bn, nc, ks[0], ks[1], L)
|
| 777 |
+
o = o * weighting
|
| 778 |
+
# Reverse 1. reshape to img shape
|
| 779 |
+
o = o.view((o.shape[0], -1, o.shape[-1])) # (bn, nc * ks[0] * ks[1], L)
|
| 780 |
+
# stitch crops together
|
| 781 |
+
decoded = fold(o)
|
| 782 |
+
decoded = decoded / normalization # norm is shape (1, 1, h, w)
|
| 783 |
+
return decoded
|
| 784 |
+
else:
|
| 785 |
+
if isinstance(self.first_stage_model, VQModelInterface):
|
| 786 |
+
return self.first_stage_model.decode(z, force_not_quantize=predict_cids or force_not_quantize)
|
| 787 |
+
else:
|
| 788 |
+
return self.first_stage_model.decode(z)
|
| 789 |
+
|
| 790 |
+
else:
|
| 791 |
+
if isinstance(self.first_stage_model, VQModelInterface):
|
| 792 |
+
return self.first_stage_model.decode(z, force_not_quantize=predict_cids or force_not_quantize)
|
| 793 |
+
else:
|
| 794 |
+
return self.first_stage_model.decode(z)
|
| 795 |
+
|
| 796 |
+
# same as above but without decorator
|
| 797 |
+
def differentiable_decode_first_stage(self, z, predict_cids=False, force_not_quantize=False):
|
| 798 |
+
if predict_cids:
|
| 799 |
+
if z.dim() == 4:
|
| 800 |
+
z = torch.argmax(z.exp(), dim=1).long()
|
| 801 |
+
z = self.first_stage_model.quantize.get_codebook_entry(z, shape=None)
|
| 802 |
+
z = rearrange(z, 'b h w c -> b c h w').contiguous()
|
| 803 |
+
|
| 804 |
+
z = 1. / self.scale_factor * z
|
| 805 |
+
|
| 806 |
+
if hasattr(self, "split_input_params"):
|
| 807 |
+
if self.split_input_params["patch_distributed_vq"]:
|
| 808 |
+
ks = self.split_input_params["ks"] # eg. (128, 128)
|
| 809 |
+
stride = self.split_input_params["stride"] # eg. (64, 64)
|
| 810 |
+
uf = self.split_input_params["vqf"]
|
| 811 |
+
bs, nc, h, w = z.shape
|
| 812 |
+
if ks[0] > h or ks[1] > w:
|
| 813 |
+
ks = (min(ks[0], h), min(ks[1], w))
|
| 814 |
+
print("reducing Kernel")
|
| 815 |
+
|
| 816 |
+
if stride[0] > h or stride[1] > w:
|
| 817 |
+
stride = (min(stride[0], h), min(stride[1], w))
|
| 818 |
+
print("reducing stride")
|
| 819 |
+
|
| 820 |
+
fold, unfold, normalization, weighting = self.get_fold_unfold(z, ks, stride, uf=uf)
|
| 821 |
+
|
| 822 |
+
z = unfold(z) # (bn, nc * prod(**ks), L)
|
| 823 |
+
# 1. Reshape to img shape
|
| 824 |
+
z = z.view((z.shape[0], -1, ks[0], ks[1], z.shape[-1])) # (bn, nc, ks[0], ks[1], L )
|
| 825 |
+
|
| 826 |
+
# 2. apply model loop over last dim
|
| 827 |
+
if isinstance(self.first_stage_model, VQModelInterface):
|
| 828 |
+
output_list = [self.first_stage_model.decode(z[:, :, :, :, i],
|
| 829 |
+
force_not_quantize=predict_cids or force_not_quantize)
|
| 830 |
+
for i in range(z.shape[-1])]
|
| 831 |
+
else:
|
| 832 |
+
|
| 833 |
+
output_list = [self.first_stage_model.decode(z[:, :, :, :, i])
|
| 834 |
+
for i in range(z.shape[-1])]
|
| 835 |
+
|
| 836 |
+
o = torch.stack(output_list, axis=-1) # # (bn, nc, ks[0], ks[1], L)
|
| 837 |
+
o = o * weighting
|
| 838 |
+
# Reverse 1. reshape to img shape
|
| 839 |
+
o = o.view((o.shape[0], -1, o.shape[-1])) # (bn, nc * ks[0] * ks[1], L)
|
| 840 |
+
# stitch crops together
|
| 841 |
+
decoded = fold(o)
|
| 842 |
+
decoded = decoded / normalization # norm is shape (1, 1, h, w)
|
| 843 |
+
return decoded
|
| 844 |
+
else:
|
| 845 |
+
if isinstance(self.first_stage_model, VQModelInterface):
|
| 846 |
+
return self.first_stage_model.decode(z, force_not_quantize=predict_cids or force_not_quantize)
|
| 847 |
+
else:
|
| 848 |
+
return self.first_stage_model.decode(z)
|
| 849 |
+
|
| 850 |
+
else:
|
| 851 |
+
if isinstance(self.first_stage_model, VQModelInterface):
|
| 852 |
+
return self.first_stage_model.decode(z, force_not_quantize=predict_cids or force_not_quantize)
|
| 853 |
+
else:
|
| 854 |
+
return self.first_stage_model.decode(z)
|
| 855 |
+
|
| 856 |
+
@torch.no_grad()
|
| 857 |
+
def encode_first_stage(self, x):
|
| 858 |
+
if hasattr(self, "split_input_params"):
|
| 859 |
+
if self.split_input_params["patch_distributed_vq"]:
|
| 860 |
+
ks = self.split_input_params["ks"] # eg. (128, 128)
|
| 861 |
+
stride = self.split_input_params["stride"] # eg. (64, 64)
|
| 862 |
+
df = self.split_input_params["vqf"]
|
| 863 |
+
self.split_input_params['original_image_size'] = x.shape[-2:]
|
| 864 |
+
bs, nc, h, w = x.shape
|
| 865 |
+
if ks[0] > h or ks[1] > w:
|
| 866 |
+
ks = (min(ks[0], h), min(ks[1], w))
|
| 867 |
+
print("reducing Kernel")
|
| 868 |
+
|
| 869 |
+
if stride[0] > h or stride[1] > w:
|
| 870 |
+
stride = (min(stride[0], h), min(stride[1], w))
|
| 871 |
+
print("reducing stride")
|
| 872 |
+
|
| 873 |
+
fold, unfold, normalization, weighting = self.get_fold_unfold(x, ks, stride, df=df)
|
| 874 |
+
z = unfold(x) # (bn, nc * prod(**ks), L)
|
| 875 |
+
# Reshape to img shape
|
| 876 |
+
z = z.view((z.shape[0], -1, ks[0], ks[1], z.shape[-1])) # (bn, nc, ks[0], ks[1], L )
|
| 877 |
+
|
| 878 |
+
output_list = [self.first_stage_model.encode(z[:, :, :, :, i])
|
| 879 |
+
for i in range(z.shape[-1])]
|
| 880 |
+
|
| 881 |
+
o = torch.stack(output_list, axis=-1)
|
| 882 |
+
o = o * weighting
|
| 883 |
+
|
| 884 |
+
# Reverse reshape to img shape
|
| 885 |
+
o = o.view((o.shape[0], -1, o.shape[-1])) # (bn, nc * ks[0] * ks[1], L)
|
| 886 |
+
# stitch crops together
|
| 887 |
+
decoded = fold(o)
|
| 888 |
+
decoded = decoded / normalization
|
| 889 |
+
return decoded
|
| 890 |
+
|
| 891 |
+
else:
|
| 892 |
+
return self.first_stage_model.encode(x)
|
| 893 |
+
else:
|
| 894 |
+
return self.first_stage_model.encode(x)
|
| 895 |
+
|
| 896 |
+
def shared_step(self, batch, **kwargs):
|
| 897 |
+
x, c = self.get_input(batch, self.first_stage_key)
|
| 898 |
+
loss = self(x, c)
|
| 899 |
+
return loss
|
| 900 |
+
|
| 901 |
+
def forward(self, x, c, features_adapter=None, *args, **kwargs):
|
| 902 |
+
t = torch.randint(0, self.num_timesteps, (x.shape[0],), device=self.device).long()
|
| 903 |
+
|
| 904 |
+
return self.p_losses(x, c, t, features_adapter, *args, **kwargs)
|
| 905 |
+
|
| 906 |
+
def _rescale_annotations(self, bboxes, crop_coordinates): # TODO: move to dataset
|
| 907 |
+
def rescale_bbox(bbox):
|
| 908 |
+
x0 = clamp((bbox[0] - crop_coordinates[0]) / crop_coordinates[2])
|
| 909 |
+
y0 = clamp((bbox[1] - crop_coordinates[1]) / crop_coordinates[3])
|
| 910 |
+
w = min(bbox[2] / crop_coordinates[2], 1 - x0)
|
| 911 |
+
h = min(bbox[3] / crop_coordinates[3], 1 - y0)
|
| 912 |
+
return x0, y0, w, h
|
| 913 |
+
|
| 914 |
+
return [rescale_bbox(b) for b in bboxes]
|
| 915 |
+
|
| 916 |
+
def apply_model(self, x_noisy, t, cond, features_adapter=None, return_ids=False):
|
| 917 |
+
|
| 918 |
+
if isinstance(cond, dict):
|
| 919 |
+
# hybrid case, cond is exptected to be a dict
|
| 920 |
+
pass
|
| 921 |
+
else:
|
| 922 |
+
if not isinstance(cond, list):
|
| 923 |
+
cond = [cond]
|
| 924 |
+
key = 'c_concat' if self.model.conditioning_key == 'concat' else 'c_crossattn'
|
| 925 |
+
cond = {key: cond}
|
| 926 |
+
|
| 927 |
+
if hasattr(self, "split_input_params"):
|
| 928 |
+
assert len(cond) == 1 # todo can only deal with one conditioning atm
|
| 929 |
+
assert not return_ids
|
| 930 |
+
ks = self.split_input_params["ks"] # eg. (128, 128)
|
| 931 |
+
stride = self.split_input_params["stride"] # eg. (64, 64)
|
| 932 |
+
|
| 933 |
+
h, w = x_noisy.shape[-2:]
|
| 934 |
+
|
| 935 |
+
fold, unfold, normalization, weighting = self.get_fold_unfold(x_noisy, ks, stride)
|
| 936 |
+
|
| 937 |
+
z = unfold(x_noisy) # (bn, nc * prod(**ks), L)
|
| 938 |
+
# Reshape to img shape
|
| 939 |
+
z = z.view((z.shape[0], -1, ks[0], ks[1], z.shape[-1])) # (bn, nc, ks[0], ks[1], L )
|
| 940 |
+
z_list = [z[:, :, :, :, i] for i in range(z.shape[-1])]
|
| 941 |
+
|
| 942 |
+
if self.cond_stage_key in ["image", "LR_image", "segmentation",
|
| 943 |
+
'bbox_img'] and self.model.conditioning_key: # todo check for completeness
|
| 944 |
+
c_key = next(iter(cond.keys())) # get key
|
| 945 |
+
c = next(iter(cond.values())) # get value
|
| 946 |
+
assert (len(c) == 1) # todo extend to list with more than one elem
|
| 947 |
+
c = c[0] # get element
|
| 948 |
+
|
| 949 |
+
c = unfold(c)
|
| 950 |
+
c = c.view((c.shape[0], -1, ks[0], ks[1], c.shape[-1])) # (bn, nc, ks[0], ks[1], L )
|
| 951 |
+
|
| 952 |
+
cond_list = [{c_key: [c[:, :, :, :, i]]} for i in range(c.shape[-1])]
|
| 953 |
+
|
| 954 |
+
elif self.cond_stage_key == 'coordinates_bbox':
|
| 955 |
+
assert 'original_image_size' in self.split_input_params, 'BoudingBoxRescaling is missing original_image_size'
|
| 956 |
+
|
| 957 |
+
# assuming padding of unfold is always 0 and its dilation is always 1
|
| 958 |
+
n_patches_per_row = int((w - ks[0]) / stride[0] + 1)
|
| 959 |
+
full_img_h, full_img_w = self.split_input_params['original_image_size']
|
| 960 |
+
# as we are operating on latents, we need the factor from the original image size to the
|
| 961 |
+
# spatial latent size to properly rescale the crops for regenerating the bbox annotations
|
| 962 |
+
num_downs = self.first_stage_model.encoder.num_resolutions - 1
|
| 963 |
+
rescale_latent = 2 ** (num_downs)
|
| 964 |
+
|
| 965 |
+
# get top left postions of patches as conforming for the bbbox tokenizer, therefore we
|
| 966 |
+
# need to rescale the tl patch coordinates to be in between (0,1)
|
| 967 |
+
tl_patch_coordinates = [(rescale_latent * stride[0] * (patch_nr % n_patches_per_row) / full_img_w,
|
| 968 |
+
rescale_latent * stride[1] * (patch_nr // n_patches_per_row) / full_img_h)
|
| 969 |
+
for patch_nr in range(z.shape[-1])]
|
| 970 |
+
|
| 971 |
+
# patch_limits are tl_coord, width and height coordinates as (x_tl, y_tl, h, w)
|
| 972 |
+
patch_limits = [(x_tl, y_tl,
|
| 973 |
+
rescale_latent * ks[0] / full_img_w,
|
| 974 |
+
rescale_latent * ks[1] / full_img_h) for x_tl, y_tl in tl_patch_coordinates]
|
| 975 |
+
# patch_values = [(np.arange(x_tl,min(x_tl+ks, 1.)),np.arange(y_tl,min(y_tl+ks, 1.))) for x_tl, y_tl in tl_patch_coordinates]
|
| 976 |
+
|
| 977 |
+
# tokenize crop coordinates for the bounding boxes of the respective patches
|
| 978 |
+
patch_limits_tknzd = [torch.LongTensor(self.bbox_tokenizer._crop_encoder(bbox))[None].to(self.device)
|
| 979 |
+
for bbox in patch_limits] # list of length l with tensors of shape (1, 2)
|
| 980 |
+
print(patch_limits_tknzd[0].shape)
|
| 981 |
+
# cut tknzd crop position from conditioning
|
| 982 |
+
assert isinstance(cond, dict), 'cond must be dict to be fed into model'
|
| 983 |
+
cut_cond = cond['c_crossattn'][0][..., :-2].to(self.device)
|
| 984 |
+
print(cut_cond.shape)
|
| 985 |
+
|
| 986 |
+
adapted_cond = torch.stack([torch.cat([cut_cond, p], dim=1) for p in patch_limits_tknzd])
|
| 987 |
+
adapted_cond = rearrange(adapted_cond, 'l b n -> (l b) n')
|
| 988 |
+
print(adapted_cond.shape)
|
| 989 |
+
adapted_cond = self.get_learned_conditioning(adapted_cond)
|
| 990 |
+
print(adapted_cond.shape)
|
| 991 |
+
adapted_cond = rearrange(adapted_cond, '(l b) n d -> l b n d', l=z.shape[-1])
|
| 992 |
+
print(adapted_cond.shape)
|
| 993 |
+
|
| 994 |
+
cond_list = [{'c_crossattn': [e]} for e in adapted_cond]
|
| 995 |
+
|
| 996 |
+
else:
|
| 997 |
+
cond_list = [cond for i in range(z.shape[-1])] # Todo make this more efficient
|
| 998 |
+
|
| 999 |
+
# apply model by loop over crops
|
| 1000 |
+
if features_adapter is not None:
|
| 1001 |
+
output_list = [self.model(z_list[i], t, **cond_list[i], features_adapter=features_adapter) for i in range(z.shape[-1])]
|
| 1002 |
+
else:
|
| 1003 |
+
output_list = [self.model(z_list[i], t, **cond_list[i]) for i in range(z.shape[-1])]
|
| 1004 |
+
assert not isinstance(output_list[0],
|
| 1005 |
+
tuple) # todo cant deal with multiple model outputs check this never happens
|
| 1006 |
+
|
| 1007 |
+
o = torch.stack(output_list, axis=-1)
|
| 1008 |
+
o = o * weighting
|
| 1009 |
+
# Reverse reshape to img shape
|
| 1010 |
+
o = o.view((o.shape[0], -1, o.shape[-1])) # (bn, nc * ks[0] * ks[1], L)
|
| 1011 |
+
# stitch crops together
|
| 1012 |
+
x_recon = fold(o) / normalization
|
| 1013 |
+
|
| 1014 |
+
else:
|
| 1015 |
+
if features_adapter is not None:
|
| 1016 |
+
x_recon = self.model(x_noisy, t, **cond, features_adapter=features_adapter)
|
| 1017 |
+
else:
|
| 1018 |
+
x_recon = self.model(x_noisy, t, **cond)
|
| 1019 |
+
|
| 1020 |
+
if isinstance(x_recon, tuple) and not return_ids:
|
| 1021 |
+
return x_recon[0]
|
| 1022 |
+
else:
|
| 1023 |
+
return x_recon
|
| 1024 |
+
|
| 1025 |
+
def _predict_eps_from_xstart(self, x_t, t, pred_xstart):
|
| 1026 |
+
return (extract_into_tensor(self.sqrt_recip_alphas_cumprod, t, x_t.shape) * x_t - pred_xstart) / \
|
| 1027 |
+
extract_into_tensor(self.sqrt_recipm1_alphas_cumprod, t, x_t.shape)
|
| 1028 |
+
|
| 1029 |
+
def _prior_bpd(self, x_start):
|
| 1030 |
+
"""
|
| 1031 |
+
Get the prior KL term for the variational lower-bound, measured in
|
| 1032 |
+
bits-per-dim.
|
| 1033 |
+
This term can't be optimized, as it only depends on the encoder.
|
| 1034 |
+
:param x_start: the [N x C x ...] tensor of inputs.
|
| 1035 |
+
:return: a batch of [N] KL values (in bits), one per batch element.
|
| 1036 |
+
"""
|
| 1037 |
+
batch_size = x_start.shape[0]
|
| 1038 |
+
t = torch.tensor([self.num_timesteps - 1] * batch_size, device=x_start.device)
|
| 1039 |
+
qt_mean, _, qt_log_variance = self.q_mean_variance(x_start, t)
|
| 1040 |
+
kl_prior = normal_kl(mean1=qt_mean, logvar1=qt_log_variance, mean2=0.0, logvar2=0.0)
|
| 1041 |
+
return mean_flat(kl_prior) / np.log(2.0)
|
| 1042 |
+
|
| 1043 |
+
def p_losses(self, x_start, cond, t, features_adapter=None, noise=None):
|
| 1044 |
+
noise = default(noise, lambda: torch.randn_like(x_start))
|
| 1045 |
+
x_noisy = self.q_sample(x_start=x_start, t=t, noise=noise)
|
| 1046 |
+
model_output = self.apply_model(x_noisy, t, cond, features_adapter)
|
| 1047 |
+
|
| 1048 |
+
loss_dict = {}
|
| 1049 |
+
prefix = 'train' if self.training else 'val'
|
| 1050 |
+
|
| 1051 |
+
if self.parameterization == "x0":
|
| 1052 |
+
target = x_start
|
| 1053 |
+
elif self.parameterization == "eps":
|
| 1054 |
+
target = noise
|
| 1055 |
+
else:
|
| 1056 |
+
raise NotImplementedError()
|
| 1057 |
+
|
| 1058 |
+
loss_simple = self.get_loss(model_output, target, mean=False).mean([1, 2, 3])
|
| 1059 |
+
loss_dict.update({f'{prefix}/loss_simple': loss_simple.mean()})
|
| 1060 |
+
|
| 1061 |
+
logvar_t = self.logvar[t].to(self.device)
|
| 1062 |
+
loss = loss_simple / torch.exp(logvar_t) + logvar_t
|
| 1063 |
+
# loss = loss_simple / torch.exp(self.logvar) + self.logvar
|
| 1064 |
+
if self.learn_logvar:
|
| 1065 |
+
loss_dict.update({f'{prefix}/loss_gamma': loss.mean()})
|
| 1066 |
+
loss_dict.update({'logvar': self.logvar.data.mean()})
|
| 1067 |
+
|
| 1068 |
+
loss = self.l_simple_weight * loss.mean()
|
| 1069 |
+
|
| 1070 |
+
loss_vlb = self.get_loss(model_output, target, mean=False).mean(dim=(1, 2, 3))
|
| 1071 |
+
loss_vlb = (self.lvlb_weights[t] * loss_vlb).mean()
|
| 1072 |
+
loss_dict.update({f'{prefix}/loss_vlb': loss_vlb})
|
| 1073 |
+
loss += (self.original_elbo_weight * loss_vlb)
|
| 1074 |
+
loss_dict.update({f'{prefix}/loss': loss})
|
| 1075 |
+
|
| 1076 |
+
return loss, loss_dict
|
| 1077 |
+
|
| 1078 |
+
def p_mean_variance(self, x, c, t, clip_denoised: bool, return_codebook_ids=False, quantize_denoised=False,
|
| 1079 |
+
return_x0=False, score_corrector=None, corrector_kwargs=None):
|
| 1080 |
+
t_in = t
|
| 1081 |
+
model_out = self.apply_model(x, t_in, c, return_ids=return_codebook_ids)
|
| 1082 |
+
|
| 1083 |
+
if score_corrector is not None:
|
| 1084 |
+
assert self.parameterization == "eps"
|
| 1085 |
+
model_out = score_corrector.modify_score(self, model_out, x, t, c, **corrector_kwargs)
|
| 1086 |
+
|
| 1087 |
+
if return_codebook_ids:
|
| 1088 |
+
model_out, logits = model_out
|
| 1089 |
+
|
| 1090 |
+
if self.parameterization == "eps":
|
| 1091 |
+
x_recon = self.predict_start_from_noise(x, t=t, noise=model_out)
|
| 1092 |
+
elif self.parameterization == "x0":
|
| 1093 |
+
x_recon = model_out
|
| 1094 |
+
else:
|
| 1095 |
+
raise NotImplementedError()
|
| 1096 |
+
|
| 1097 |
+
if clip_denoised:
|
| 1098 |
+
x_recon.clamp_(-1., 1.)
|
| 1099 |
+
if quantize_denoised:
|
| 1100 |
+
x_recon, _, [_, _, indices] = self.first_stage_model.quantize(x_recon)
|
| 1101 |
+
model_mean, posterior_variance, posterior_log_variance = self.q_posterior(x_start=x_recon, x_t=x, t=t)
|
| 1102 |
+
if return_codebook_ids:
|
| 1103 |
+
return model_mean, posterior_variance, posterior_log_variance, logits
|
| 1104 |
+
elif return_x0:
|
| 1105 |
+
return model_mean, posterior_variance, posterior_log_variance, x_recon
|
| 1106 |
+
else:
|
| 1107 |
+
return model_mean, posterior_variance, posterior_log_variance
|
| 1108 |
+
|
| 1109 |
+
@torch.no_grad()
|
| 1110 |
+
def p_sample(self, x, c, t, clip_denoised=False, repeat_noise=False,
|
| 1111 |
+
return_codebook_ids=False, quantize_denoised=False, return_x0=False,
|
| 1112 |
+
temperature=1., noise_dropout=0., score_corrector=None, corrector_kwargs=None):
|
| 1113 |
+
b, *_, device = *x.shape, x.device
|
| 1114 |
+
outputs = self.p_mean_variance(x=x, c=c, t=t, clip_denoised=clip_denoised,
|
| 1115 |
+
return_codebook_ids=return_codebook_ids,
|
| 1116 |
+
quantize_denoised=quantize_denoised,
|
| 1117 |
+
return_x0=return_x0,
|
| 1118 |
+
score_corrector=score_corrector, corrector_kwargs=corrector_kwargs)
|
| 1119 |
+
if return_codebook_ids:
|
| 1120 |
+
raise DeprecationWarning("Support dropped.")
|
| 1121 |
+
model_mean, _, model_log_variance, logits = outputs
|
| 1122 |
+
elif return_x0:
|
| 1123 |
+
model_mean, _, model_log_variance, x0 = outputs
|
| 1124 |
+
else:
|
| 1125 |
+
model_mean, _, model_log_variance = outputs
|
| 1126 |
+
|
| 1127 |
+
noise = noise_like(x.shape, device, repeat_noise) * temperature
|
| 1128 |
+
if noise_dropout > 0.:
|
| 1129 |
+
noise = torch.nn.functional.dropout(noise, p=noise_dropout)
|
| 1130 |
+
# no noise when t == 0
|
| 1131 |
+
nonzero_mask = (1 - (t == 0).float()).reshape(b, *((1,) * (len(x.shape) - 1)))
|
| 1132 |
+
|
| 1133 |
+
if return_codebook_ids:
|
| 1134 |
+
return model_mean + nonzero_mask * (0.5 * model_log_variance).exp() * noise, logits.argmax(dim=1)
|
| 1135 |
+
if return_x0:
|
| 1136 |
+
return model_mean + nonzero_mask * (0.5 * model_log_variance).exp() * noise, x0
|
| 1137 |
+
else:
|
| 1138 |
+
return model_mean + nonzero_mask * (0.5 * model_log_variance).exp() * noise
|
| 1139 |
+
|
| 1140 |
+
@torch.no_grad()
|
| 1141 |
+
def progressive_denoising(self, cond, shape, verbose=True, callback=None, quantize_denoised=False,
|
| 1142 |
+
img_callback=None, mask=None, x0=None, temperature=1., noise_dropout=0.,
|
| 1143 |
+
score_corrector=None, corrector_kwargs=None, batch_size=None, x_T=None, start_T=None,
|
| 1144 |
+
log_every_t=None):
|
| 1145 |
+
if not log_every_t:
|
| 1146 |
+
log_every_t = self.log_every_t
|
| 1147 |
+
timesteps = self.num_timesteps
|
| 1148 |
+
if batch_size is not None:
|
| 1149 |
+
b = batch_size if batch_size is not None else shape[0]
|
| 1150 |
+
shape = [batch_size] + list(shape)
|
| 1151 |
+
else:
|
| 1152 |
+
b = batch_size = shape[0]
|
| 1153 |
+
if x_T is None:
|
| 1154 |
+
img = torch.randn(shape, device=self.device)
|
| 1155 |
+
else:
|
| 1156 |
+
img = x_T
|
| 1157 |
+
intermediates = []
|
| 1158 |
+
if cond is not None:
|
| 1159 |
+
if isinstance(cond, dict):
|
| 1160 |
+
cond = {key: cond[key][:batch_size] if not isinstance(cond[key], list) else
|
| 1161 |
+
list(map(lambda x: x[:batch_size], cond[key])) for key in cond}
|
| 1162 |
+
else:
|
| 1163 |
+
cond = [c[:batch_size] for c in cond] if isinstance(cond, list) else cond[:batch_size]
|
| 1164 |
+
|
| 1165 |
+
if start_T is not None:
|
| 1166 |
+
timesteps = min(timesteps, start_T)
|
| 1167 |
+
iterator = tqdm(reversed(range(0, timesteps)), desc='Progressive Generation',
|
| 1168 |
+
total=timesteps) if verbose else reversed(
|
| 1169 |
+
range(0, timesteps))
|
| 1170 |
+
if type(temperature) == float:
|
| 1171 |
+
temperature = [temperature] * timesteps
|
| 1172 |
+
|
| 1173 |
+
for i in iterator:
|
| 1174 |
+
ts = torch.full((b,), i, device=self.device, dtype=torch.long)
|
| 1175 |
+
if self.shorten_cond_schedule:
|
| 1176 |
+
assert self.model.conditioning_key != 'hybrid'
|
| 1177 |
+
tc = self.cond_ids[ts].to(cond.device)
|
| 1178 |
+
cond = self.q_sample(x_start=cond, t=tc, noise=torch.randn_like(cond))
|
| 1179 |
+
|
| 1180 |
+
img, x0_partial = self.p_sample(img, cond, ts,
|
| 1181 |
+
clip_denoised=self.clip_denoised,
|
| 1182 |
+
quantize_denoised=quantize_denoised, return_x0=True,
|
| 1183 |
+
temperature=temperature[i], noise_dropout=noise_dropout,
|
| 1184 |
+
score_corrector=score_corrector, corrector_kwargs=corrector_kwargs)
|
| 1185 |
+
if mask is not None:
|
| 1186 |
+
assert x0 is not None
|
| 1187 |
+
img_orig = self.q_sample(x0, ts)
|
| 1188 |
+
img = img_orig * mask + (1. - mask) * img
|
| 1189 |
+
|
| 1190 |
+
if i % log_every_t == 0 or i == timesteps - 1:
|
| 1191 |
+
intermediates.append(x0_partial)
|
| 1192 |
+
if callback: callback(i)
|
| 1193 |
+
if img_callback: img_callback(img, i)
|
| 1194 |
+
return img, intermediates
|
| 1195 |
+
|
| 1196 |
+
@torch.no_grad()
|
| 1197 |
+
def p_sample_loop(self, cond, shape, return_intermediates=False,
|
| 1198 |
+
x_T=None, verbose=True, callback=None, timesteps=None, quantize_denoised=False,
|
| 1199 |
+
mask=None, x0=None, img_callback=None, start_T=None,
|
| 1200 |
+
log_every_t=None):
|
| 1201 |
+
|
| 1202 |
+
if not log_every_t:
|
| 1203 |
+
log_every_t = self.log_every_t
|
| 1204 |
+
device = self.betas.device
|
| 1205 |
+
b = shape[0]
|
| 1206 |
+
if x_T is None:
|
| 1207 |
+
img = torch.randn(shape, device=device)
|
| 1208 |
+
else:
|
| 1209 |
+
img = x_T
|
| 1210 |
+
|
| 1211 |
+
intermediates = [img]
|
| 1212 |
+
if timesteps is None:
|
| 1213 |
+
timesteps = self.num_timesteps
|
| 1214 |
+
|
| 1215 |
+
if start_T is not None:
|
| 1216 |
+
timesteps = min(timesteps, start_T)
|
| 1217 |
+
iterator = tqdm(reversed(range(0, timesteps)), desc='Sampling t', total=timesteps) if verbose else reversed(
|
| 1218 |
+
range(0, timesteps))
|
| 1219 |
+
|
| 1220 |
+
if mask is not None:
|
| 1221 |
+
assert x0 is not None
|
| 1222 |
+
assert x0.shape[2:3] == mask.shape[2:3] # spatial size has to match
|
| 1223 |
+
|
| 1224 |
+
for i in iterator:
|
| 1225 |
+
ts = torch.full((b,), i, device=device, dtype=torch.long)
|
| 1226 |
+
if self.shorten_cond_schedule:
|
| 1227 |
+
assert self.model.conditioning_key != 'hybrid'
|
| 1228 |
+
tc = self.cond_ids[ts].to(cond.device)
|
| 1229 |
+
cond = self.q_sample(x_start=cond, t=tc, noise=torch.randn_like(cond))
|
| 1230 |
+
|
| 1231 |
+
img = self.p_sample(img, cond, ts,
|
| 1232 |
+
clip_denoised=self.clip_denoised,
|
| 1233 |
+
quantize_denoised=quantize_denoised)
|
| 1234 |
+
if mask is not None:
|
| 1235 |
+
img_orig = self.q_sample(x0, ts)
|
| 1236 |
+
img = img_orig * mask + (1. - mask) * img
|
| 1237 |
+
|
| 1238 |
+
if i % log_every_t == 0 or i == timesteps - 1:
|
| 1239 |
+
intermediates.append(img)
|
| 1240 |
+
if callback: callback(i)
|
| 1241 |
+
if img_callback: img_callback(img, i)
|
| 1242 |
+
|
| 1243 |
+
if return_intermediates:
|
| 1244 |
+
return img, intermediates
|
| 1245 |
+
return img
|
| 1246 |
+
|
| 1247 |
+
@torch.no_grad()
|
| 1248 |
+
def sample(self, cond, batch_size=16, return_intermediates=False, x_T=None,
|
| 1249 |
+
verbose=True, timesteps=None, quantize_denoised=False,
|
| 1250 |
+
mask=None, x0=None, shape=None,**kwargs):
|
| 1251 |
+
if shape is None:
|
| 1252 |
+
shape = (batch_size, self.channels, self.image_size, self.image_size)
|
| 1253 |
+
if cond is not None:
|
| 1254 |
+
if isinstance(cond, dict):
|
| 1255 |
+
cond = {key: cond[key][:batch_size] if not isinstance(cond[key], list) else
|
| 1256 |
+
list(map(lambda x: x[:batch_size], cond[key])) for key in cond}
|
| 1257 |
+
else:
|
| 1258 |
+
cond = [c[:batch_size] for c in cond] if isinstance(cond, list) else cond[:batch_size]
|
| 1259 |
+
return self.p_sample_loop(cond,
|
| 1260 |
+
shape,
|
| 1261 |
+
return_intermediates=return_intermediates, x_T=x_T,
|
| 1262 |
+
verbose=verbose, timesteps=timesteps, quantize_denoised=quantize_denoised,
|
| 1263 |
+
mask=mask, x0=x0)
|
| 1264 |
+
|
| 1265 |
+
@torch.no_grad()
|
| 1266 |
+
def sample_log(self,cond,batch_size,ddim, ddim_steps,**kwargs):
|
| 1267 |
+
|
| 1268 |
+
if ddim:
|
| 1269 |
+
ddim_sampler = DDIMSampler(self)
|
| 1270 |
+
shape = (self.channels, self.image_size, self.image_size)
|
| 1271 |
+
samples, intermediates =ddim_sampler.sample(ddim_steps,batch_size,
|
| 1272 |
+
shape,cond,verbose=False,**kwargs)
|
| 1273 |
+
|
| 1274 |
+
else:
|
| 1275 |
+
samples, intermediates = self.sample(cond=cond, batch_size=batch_size,
|
| 1276 |
+
return_intermediates=True,**kwargs)
|
| 1277 |
+
|
| 1278 |
+
return samples, intermediates
|
| 1279 |
+
|
| 1280 |
+
|
| 1281 |
+
@torch.no_grad()
|
| 1282 |
+
def log_images(self, batch, N=8, n_row=4, sample=True, ddim_steps=200, ddim_eta=1., return_keys=None,
|
| 1283 |
+
quantize_denoised=True, inpaint=True, plot_denoise_rows=False, plot_progressive_rows=True,
|
| 1284 |
+
plot_diffusion_rows=True, **kwargs):
|
| 1285 |
+
|
| 1286 |
+
use_ddim = ddim_steps is not None
|
| 1287 |
+
|
| 1288 |
+
log = dict()
|
| 1289 |
+
z, c, x, xrec, xc = self.get_input(batch, self.first_stage_key,
|
| 1290 |
+
return_first_stage_outputs=True,
|
| 1291 |
+
force_c_encode=True,
|
| 1292 |
+
return_original_cond=True,
|
| 1293 |
+
bs=N)
|
| 1294 |
+
N = min(x.shape[0], N)
|
| 1295 |
+
n_row = min(x.shape[0], n_row)
|
| 1296 |
+
log["inputs"] = x
|
| 1297 |
+
log["reconstruction"] = xrec
|
| 1298 |
+
if self.model.conditioning_key is not None:
|
| 1299 |
+
if hasattr(self.cond_stage_model, "decode"):
|
| 1300 |
+
xc = self.cond_stage_model.decode(c)
|
| 1301 |
+
log["conditioning"] = xc
|
| 1302 |
+
elif self.cond_stage_key in ["caption"]:
|
| 1303 |
+
xc = log_txt_as_img((x.shape[2], x.shape[3]), batch["caption"])
|
| 1304 |
+
log["conditioning"] = xc
|
| 1305 |
+
elif self.cond_stage_key == 'class_label':
|
| 1306 |
+
xc = log_txt_as_img((x.shape[2], x.shape[3]), batch["human_label"])
|
| 1307 |
+
log['conditioning'] = xc
|
| 1308 |
+
elif isimage(xc):
|
| 1309 |
+
log["conditioning"] = xc
|
| 1310 |
+
if ismap(xc):
|
| 1311 |
+
log["original_conditioning"] = self.to_rgb(xc)
|
| 1312 |
+
|
| 1313 |
+
if plot_diffusion_rows:
|
| 1314 |
+
# get diffusion row
|
| 1315 |
+
diffusion_row = list()
|
| 1316 |
+
z_start = z[:n_row]
|
| 1317 |
+
for t in range(self.num_timesteps):
|
| 1318 |
+
if t % self.log_every_t == 0 or t == self.num_timesteps - 1:
|
| 1319 |
+
t = repeat(torch.tensor([t]), '1 -> b', b=n_row)
|
| 1320 |
+
t = t.to(self.device).long()
|
| 1321 |
+
noise = torch.randn_like(z_start)
|
| 1322 |
+
z_noisy = self.q_sample(x_start=z_start, t=t, noise=noise)
|
| 1323 |
+
diffusion_row.append(self.decode_first_stage(z_noisy))
|
| 1324 |
+
|
| 1325 |
+
diffusion_row = torch.stack(diffusion_row) # n_log_step, n_row, C, H, W
|
| 1326 |
+
diffusion_grid = rearrange(diffusion_row, 'n b c h w -> b n c h w')
|
| 1327 |
+
diffusion_grid = rearrange(diffusion_grid, 'b n c h w -> (b n) c h w')
|
| 1328 |
+
diffusion_grid = make_grid(diffusion_grid, nrow=diffusion_row.shape[0])
|
| 1329 |
+
log["diffusion_row"] = diffusion_grid
|
| 1330 |
+
|
| 1331 |
+
if sample:
|
| 1332 |
+
# get denoise row
|
| 1333 |
+
with self.ema_scope("Plotting"):
|
| 1334 |
+
samples, z_denoise_row = self.sample_log(cond=c,batch_size=N,ddim=use_ddim,
|
| 1335 |
+
ddim_steps=ddim_steps,eta=ddim_eta)
|
| 1336 |
+
# samples, z_denoise_row = self.sample(cond=c, batch_size=N, return_intermediates=True)
|
| 1337 |
+
x_samples = self.decode_first_stage(samples)
|
| 1338 |
+
log["samples"] = x_samples
|
| 1339 |
+
if plot_denoise_rows:
|
| 1340 |
+
denoise_grid = self._get_denoise_row_from_list(z_denoise_row)
|
| 1341 |
+
log["denoise_row"] = denoise_grid
|
| 1342 |
+
|
| 1343 |
+
if quantize_denoised and not isinstance(self.first_stage_model, AutoencoderKL) and not isinstance(
|
| 1344 |
+
self.first_stage_model, IdentityFirstStage):
|
| 1345 |
+
# also display when quantizing x0 while sampling
|
| 1346 |
+
with self.ema_scope("Plotting Quantized Denoised"):
|
| 1347 |
+
samples, z_denoise_row = self.sample_log(cond=c,batch_size=N,ddim=use_ddim,
|
| 1348 |
+
ddim_steps=ddim_steps,eta=ddim_eta,
|
| 1349 |
+
quantize_denoised=True)
|
| 1350 |
+
# samples, z_denoise_row = self.sample(cond=c, batch_size=N, return_intermediates=True,
|
| 1351 |
+
# quantize_denoised=True)
|
| 1352 |
+
x_samples = self.decode_first_stage(samples.to(self.device))
|
| 1353 |
+
log["samples_x0_quantized"] = x_samples
|
| 1354 |
+
|
| 1355 |
+
if inpaint:
|
| 1356 |
+
# make a simple center square
|
| 1357 |
+
b, h, w = z.shape[0], z.shape[2], z.shape[3]
|
| 1358 |
+
mask = torch.ones(N, h, w).to(self.device)
|
| 1359 |
+
# zeros will be filled in
|
| 1360 |
+
mask[:, h // 4:3 * h // 4, w // 4:3 * w // 4] = 0.
|
| 1361 |
+
mask = mask[:, None, ...]
|
| 1362 |
+
with self.ema_scope("Plotting Inpaint"):
|
| 1363 |
+
|
| 1364 |
+
samples, _ = self.sample_log(cond=c,batch_size=N,ddim=use_ddim, eta=ddim_eta,
|
| 1365 |
+
ddim_steps=ddim_steps, x0=z[:N], mask=mask)
|
| 1366 |
+
x_samples = self.decode_first_stage(samples.to(self.device))
|
| 1367 |
+
log["samples_inpainting"] = x_samples
|
| 1368 |
+
log["mask"] = mask
|
| 1369 |
+
|
| 1370 |
+
# outpaint
|
| 1371 |
+
with self.ema_scope("Plotting Outpaint"):
|
| 1372 |
+
samples, _ = self.sample_log(cond=c, batch_size=N, ddim=use_ddim,eta=ddim_eta,
|
| 1373 |
+
ddim_steps=ddim_steps, x0=z[:N], mask=mask)
|
| 1374 |
+
x_samples = self.decode_first_stage(samples.to(self.device))
|
| 1375 |
+
log["samples_outpainting"] = x_samples
|
| 1376 |
+
|
| 1377 |
+
if plot_progressive_rows:
|
| 1378 |
+
with self.ema_scope("Plotting Progressives"):
|
| 1379 |
+
img, progressives = self.progressive_denoising(c,
|
| 1380 |
+
shape=(self.channels, self.image_size, self.image_size),
|
| 1381 |
+
batch_size=N)
|
| 1382 |
+
prog_row = self._get_denoise_row_from_list(progressives, desc="Progressive Generation")
|
| 1383 |
+
log["progressive_row"] = prog_row
|
| 1384 |
+
|
| 1385 |
+
if return_keys:
|
| 1386 |
+
if np.intersect1d(list(log.keys()), return_keys).shape[0] == 0:
|
| 1387 |
+
return log
|
| 1388 |
+
else:
|
| 1389 |
+
return {key: log[key] for key in return_keys}
|
| 1390 |
+
return log
|
| 1391 |
+
|
| 1392 |
+
def configure_optimizers(self):
|
| 1393 |
+
lr = self.learning_rate
|
| 1394 |
+
params = list(self.model.parameters())
|
| 1395 |
+
if self.cond_stage_trainable:
|
| 1396 |
+
print(f"{self.__class__.__name__}: Also optimizing conditioner params!")
|
| 1397 |
+
params = params + list(self.cond_stage_model.parameters())
|
| 1398 |
+
if self.learn_logvar:
|
| 1399 |
+
print('Diffusion model optimizing logvar')
|
| 1400 |
+
params.append(self.logvar)
|
| 1401 |
+
opt = torch.optim.AdamW(params, lr=lr)
|
| 1402 |
+
if self.use_scheduler:
|
| 1403 |
+
assert 'target' in self.scheduler_config
|
| 1404 |
+
scheduler = instantiate_from_config(self.scheduler_config)
|
| 1405 |
+
|
| 1406 |
+
print("Setting up LambdaLR scheduler...")
|
| 1407 |
+
scheduler = [
|
| 1408 |
+
{
|
| 1409 |
+
'scheduler': LambdaLR(opt, lr_lambda=scheduler.schedule),
|
| 1410 |
+
'interval': 'step',
|
| 1411 |
+
'frequency': 1
|
| 1412 |
+
}]
|
| 1413 |
+
return [opt], scheduler
|
| 1414 |
+
return opt
|
| 1415 |
+
|
| 1416 |
+
@torch.no_grad()
|
| 1417 |
+
def to_rgb(self, x):
|
| 1418 |
+
x = x.float()
|
| 1419 |
+
if not hasattr(self, "colorize"):
|
| 1420 |
+
self.colorize = torch.randn(3, x.shape[1], 1, 1).to(x)
|
| 1421 |
+
x = nn.functional.conv2d(x, weight=self.colorize)
|
| 1422 |
+
x = 2. * (x - x.min()) / (x.max() - x.min()) - 1.
|
| 1423 |
+
return x
|
| 1424 |
+
|
| 1425 |
+
class Layout2ImgDiffusion(LatentDiffusion):
|
| 1426 |
+
# TODO: move all layout-specific hacks to this class
|
| 1427 |
+
def __init__(self, cond_stage_key, *args, **kwargs):
|
| 1428 |
+
assert cond_stage_key == 'coordinates_bbox', 'Layout2ImgDiffusion only for cond_stage_key="coordinates_bbox"'
|
| 1429 |
+
super().__init__(cond_stage_key=cond_stage_key, *args, **kwargs)
|
| 1430 |
+
|
| 1431 |
+
def log_images(self, batch, N=8, *args, **kwargs):
|
| 1432 |
+
logs = super().log_images(batch=batch, N=N, *args, **kwargs)
|
| 1433 |
+
|
| 1434 |
+
key = 'train' if self.training else 'validation'
|
| 1435 |
+
dset = self.trainer.datamodule.datasets[key]
|
| 1436 |
+
mapper = dset.conditional_builders[self.cond_stage_key]
|
| 1437 |
+
|
| 1438 |
+
bbox_imgs = []
|
| 1439 |
+
map_fn = lambda catno: dset.get_textual_label(dset.get_category_id(catno))
|
| 1440 |
+
for tknzd_bbox in batch[self.cond_stage_key][:N]:
|
| 1441 |
+
bboximg = mapper.plot(tknzd_bbox.detach().cpu(), map_fn, (256, 256))
|
| 1442 |
+
bbox_imgs.append(bboximg)
|
| 1443 |
+
|
| 1444 |
+
cond_img = torch.stack(bbox_imgs, dim=0)
|
| 1445 |
+
logs['bbox_image'] = cond_img
|
| 1446 |
+
return logs
|
ldm/models/diffusion/dpm_solver/__init__.py
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
from .sampler import DPMSolverSampler
|
ldm/models/diffusion/dpm_solver/dpm_solver.py
ADDED
|
@@ -0,0 +1,1184 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import torch
|
| 2 |
+
import torch.nn.functional as F
|
| 3 |
+
import math
|
| 4 |
+
|
| 5 |
+
|
| 6 |
+
class NoiseScheduleVP:
|
| 7 |
+
def __init__(
|
| 8 |
+
self,
|
| 9 |
+
schedule='discrete',
|
| 10 |
+
betas=None,
|
| 11 |
+
alphas_cumprod=None,
|
| 12 |
+
continuous_beta_0=0.1,
|
| 13 |
+
continuous_beta_1=20.,
|
| 14 |
+
):
|
| 15 |
+
"""Create a wrapper class for the forward SDE (VP type).
|
| 16 |
+
|
| 17 |
+
***
|
| 18 |
+
Update: We support discrete-time diffusion models by implementing a picewise linear interpolation for log_alpha_t.
|
| 19 |
+
We recommend to use schedule='discrete' for the discrete-time diffusion models, especially for high-resolution images.
|
| 20 |
+
***
|
| 21 |
+
|
| 22 |
+
The forward SDE ensures that the condition distribution q_{t|0}(x_t | x_0) = N ( alpha_t * x_0, sigma_t^2 * I ).
|
| 23 |
+
We further define lambda_t = log(alpha_t) - log(sigma_t), which is the half-logSNR (described in the DPM-Solver paper).
|
| 24 |
+
Therefore, we implement the functions for computing alpha_t, sigma_t and lambda_t. For t in [0, T], we have:
|
| 25 |
+
|
| 26 |
+
log_alpha_t = self.marginal_log_mean_coeff(t)
|
| 27 |
+
sigma_t = self.marginal_std(t)
|
| 28 |
+
lambda_t = self.marginal_lambda(t)
|
| 29 |
+
|
| 30 |
+
Moreover, as lambda(t) is an invertible function, we also support its inverse function:
|
| 31 |
+
|
| 32 |
+
t = self.inverse_lambda(lambda_t)
|
| 33 |
+
|
| 34 |
+
===============================================================
|
| 35 |
+
|
| 36 |
+
We support both discrete-time DPMs (trained on n = 0, 1, ..., N-1) and continuous-time DPMs (trained on t in [t_0, T]).
|
| 37 |
+
|
| 38 |
+
1. For discrete-time DPMs:
|
| 39 |
+
|
| 40 |
+
For discrete-time DPMs trained on n = 0, 1, ..., N-1, we convert the discrete steps to continuous time steps by:
|
| 41 |
+
t_i = (i + 1) / N
|
| 42 |
+
e.g. for N = 1000, we have t_0 = 1e-3 and T = t_{N-1} = 1.
|
| 43 |
+
We solve the corresponding diffusion ODE from time T = 1 to time t_0 = 1e-3.
|
| 44 |
+
|
| 45 |
+
Args:
|
| 46 |
+
betas: A `torch.Tensor`. The beta array for the discrete-time DPM. (See the original DDPM paper for details)
|
| 47 |
+
alphas_cumprod: A `torch.Tensor`. The cumprod alphas for the discrete-time DPM. (See the original DDPM paper for details)
|
| 48 |
+
|
| 49 |
+
Note that we always have alphas_cumprod = cumprod(betas). Therefore, we only need to set one of `betas` and `alphas_cumprod`.
|
| 50 |
+
|
| 51 |
+
**Important**: Please pay special attention for the args for `alphas_cumprod`:
|
| 52 |
+
The `alphas_cumprod` is the \hat{alpha_n} arrays in the notations of DDPM. Specifically, DDPMs assume that
|
| 53 |
+
q_{t_n | 0}(x_{t_n} | x_0) = N ( \sqrt{\hat{alpha_n}} * x_0, (1 - \hat{alpha_n}) * I ).
|
| 54 |
+
Therefore, the notation \hat{alpha_n} is different from the notation alpha_t in DPM-Solver. In fact, we have
|
| 55 |
+
alpha_{t_n} = \sqrt{\hat{alpha_n}},
|
| 56 |
+
and
|
| 57 |
+
log(alpha_{t_n}) = 0.5 * log(\hat{alpha_n}).
|
| 58 |
+
|
| 59 |
+
|
| 60 |
+
2. For continuous-time DPMs:
|
| 61 |
+
|
| 62 |
+
We support two types of VPSDEs: linear (DDPM) and cosine (improved-DDPM). The hyperparameters for the noise
|
| 63 |
+
schedule are the default settings in DDPM and improved-DDPM:
|
| 64 |
+
|
| 65 |
+
Args:
|
| 66 |
+
beta_min: A `float` number. The smallest beta for the linear schedule.
|
| 67 |
+
beta_max: A `float` number. The largest beta for the linear schedule.
|
| 68 |
+
cosine_s: A `float` number. The hyperparameter in the cosine schedule.
|
| 69 |
+
cosine_beta_max: A `float` number. The hyperparameter in the cosine schedule.
|
| 70 |
+
T: A `float` number. The ending time of the forward process.
|
| 71 |
+
|
| 72 |
+
===============================================================
|
| 73 |
+
|
| 74 |
+
Args:
|
| 75 |
+
schedule: A `str`. The noise schedule of the forward SDE. 'discrete' for discrete-time DPMs,
|
| 76 |
+
'linear' or 'cosine' for continuous-time DPMs.
|
| 77 |
+
Returns:
|
| 78 |
+
A wrapper object of the forward SDE (VP type).
|
| 79 |
+
|
| 80 |
+
===============================================================
|
| 81 |
+
|
| 82 |
+
Example:
|
| 83 |
+
|
| 84 |
+
# For discrete-time DPMs, given betas (the beta array for n = 0, 1, ..., N - 1):
|
| 85 |
+
>>> ns = NoiseScheduleVP('discrete', betas=betas)
|
| 86 |
+
|
| 87 |
+
# For discrete-time DPMs, given alphas_cumprod (the \hat{alpha_n} array for n = 0, 1, ..., N - 1):
|
| 88 |
+
>>> ns = NoiseScheduleVP('discrete', alphas_cumprod=alphas_cumprod)
|
| 89 |
+
|
| 90 |
+
# For continuous-time DPMs (VPSDE), linear schedule:
|
| 91 |
+
>>> ns = NoiseScheduleVP('linear', continuous_beta_0=0.1, continuous_beta_1=20.)
|
| 92 |
+
|
| 93 |
+
"""
|
| 94 |
+
|
| 95 |
+
if schedule not in ['discrete', 'linear', 'cosine']:
|
| 96 |
+
raise ValueError("Unsupported noise schedule {}. The schedule needs to be 'discrete' or 'linear' or 'cosine'".format(schedule))
|
| 97 |
+
|
| 98 |
+
self.schedule = schedule
|
| 99 |
+
if schedule == 'discrete':
|
| 100 |
+
if betas is not None:
|
| 101 |
+
log_alphas = 0.5 * torch.log(1 - betas).cumsum(dim=0)
|
| 102 |
+
else:
|
| 103 |
+
assert alphas_cumprod is not None
|
| 104 |
+
log_alphas = 0.5 * torch.log(alphas_cumprod)
|
| 105 |
+
self.total_N = len(log_alphas)
|
| 106 |
+
self.T = 1.
|
| 107 |
+
self.t_array = torch.linspace(0., 1., self.total_N + 1)[1:].reshape((1, -1))
|
| 108 |
+
self.log_alpha_array = log_alphas.reshape((1, -1,))
|
| 109 |
+
else:
|
| 110 |
+
self.total_N = 1000
|
| 111 |
+
self.beta_0 = continuous_beta_0
|
| 112 |
+
self.beta_1 = continuous_beta_1
|
| 113 |
+
self.cosine_s = 0.008
|
| 114 |
+
self.cosine_beta_max = 999.
|
| 115 |
+
self.cosine_t_max = math.atan(self.cosine_beta_max * (1. + self.cosine_s) / math.pi) * 2. * (1. + self.cosine_s) / math.pi - self.cosine_s
|
| 116 |
+
self.cosine_log_alpha_0 = math.log(math.cos(self.cosine_s / (1. + self.cosine_s) * math.pi / 2.))
|
| 117 |
+
self.schedule = schedule
|
| 118 |
+
if schedule == 'cosine':
|
| 119 |
+
# For the cosine schedule, T = 1 will have numerical issues. So we manually set the ending time T.
|
| 120 |
+
# Note that T = 0.9946 may be not the optimal setting. However, we find it works well.
|
| 121 |
+
self.T = 0.9946
|
| 122 |
+
else:
|
| 123 |
+
self.T = 1.
|
| 124 |
+
|
| 125 |
+
def marginal_log_mean_coeff(self, t):
|
| 126 |
+
"""
|
| 127 |
+
Compute log(alpha_t) of a given continuous-time label t in [0, T].
|
| 128 |
+
"""
|
| 129 |
+
if self.schedule == 'discrete':
|
| 130 |
+
return interpolate_fn(t.reshape((-1, 1)), self.t_array.to(t.device), self.log_alpha_array.to(t.device)).reshape((-1))
|
| 131 |
+
elif self.schedule == 'linear':
|
| 132 |
+
return -0.25 * t ** 2 * (self.beta_1 - self.beta_0) - 0.5 * t * self.beta_0
|
| 133 |
+
elif self.schedule == 'cosine':
|
| 134 |
+
log_alpha_fn = lambda s: torch.log(torch.cos((s + self.cosine_s) / (1. + self.cosine_s) * math.pi / 2.))
|
| 135 |
+
log_alpha_t = log_alpha_fn(t) - self.cosine_log_alpha_0
|
| 136 |
+
return log_alpha_t
|
| 137 |
+
|
| 138 |
+
def marginal_alpha(self, t):
|
| 139 |
+
"""
|
| 140 |
+
Compute alpha_t of a given continuous-time label t in [0, T].
|
| 141 |
+
"""
|
| 142 |
+
return torch.exp(self.marginal_log_mean_coeff(t))
|
| 143 |
+
|
| 144 |
+
def marginal_std(self, t):
|
| 145 |
+
"""
|
| 146 |
+
Compute sigma_t of a given continuous-time label t in [0, T].
|
| 147 |
+
"""
|
| 148 |
+
return torch.sqrt(1. - torch.exp(2. * self.marginal_log_mean_coeff(t)))
|
| 149 |
+
|
| 150 |
+
def marginal_lambda(self, t):
|
| 151 |
+
"""
|
| 152 |
+
Compute lambda_t = log(alpha_t) - log(sigma_t) of a given continuous-time label t in [0, T].
|
| 153 |
+
"""
|
| 154 |
+
log_mean_coeff = self.marginal_log_mean_coeff(t)
|
| 155 |
+
log_std = 0.5 * torch.log(1. - torch.exp(2. * log_mean_coeff))
|
| 156 |
+
return log_mean_coeff - log_std
|
| 157 |
+
|
| 158 |
+
def inverse_lambda(self, lamb):
|
| 159 |
+
"""
|
| 160 |
+
Compute the continuous-time label t in [0, T] of a given half-logSNR lambda_t.
|
| 161 |
+
"""
|
| 162 |
+
if self.schedule == 'linear':
|
| 163 |
+
tmp = 2. * (self.beta_1 - self.beta_0) * torch.logaddexp(-2. * lamb, torch.zeros((1,)).to(lamb))
|
| 164 |
+
Delta = self.beta_0**2 + tmp
|
| 165 |
+
return tmp / (torch.sqrt(Delta) + self.beta_0) / (self.beta_1 - self.beta_0)
|
| 166 |
+
elif self.schedule == 'discrete':
|
| 167 |
+
log_alpha = -0.5 * torch.logaddexp(torch.zeros((1,)).to(lamb.device), -2. * lamb)
|
| 168 |
+
t = interpolate_fn(log_alpha.reshape((-1, 1)), torch.flip(self.log_alpha_array.to(lamb.device), [1]), torch.flip(self.t_array.to(lamb.device), [1]))
|
| 169 |
+
return t.reshape((-1,))
|
| 170 |
+
else:
|
| 171 |
+
log_alpha = -0.5 * torch.logaddexp(-2. * lamb, torch.zeros((1,)).to(lamb))
|
| 172 |
+
t_fn = lambda log_alpha_t: torch.arccos(torch.exp(log_alpha_t + self.cosine_log_alpha_0)) * 2. * (1. + self.cosine_s) / math.pi - self.cosine_s
|
| 173 |
+
t = t_fn(log_alpha)
|
| 174 |
+
return t
|
| 175 |
+
|
| 176 |
+
|
| 177 |
+
def model_wrapper(
|
| 178 |
+
model,
|
| 179 |
+
noise_schedule,
|
| 180 |
+
model_type="noise",
|
| 181 |
+
model_kwargs={},
|
| 182 |
+
guidance_type="uncond",
|
| 183 |
+
condition=None,
|
| 184 |
+
unconditional_condition=None,
|
| 185 |
+
guidance_scale=1.,
|
| 186 |
+
classifier_fn=None,
|
| 187 |
+
classifier_kwargs={},
|
| 188 |
+
):
|
| 189 |
+
"""Create a wrapper function for the noise prediction model.
|
| 190 |
+
|
| 191 |
+
DPM-Solver needs to solve the continuous-time diffusion ODEs. For DPMs trained on discrete-time labels, we need to
|
| 192 |
+
firstly wrap the model function to a noise prediction model that accepts the continuous time as the input.
|
| 193 |
+
|
| 194 |
+
We support four types of the diffusion model by setting `model_type`:
|
| 195 |
+
|
| 196 |
+
1. "noise": noise prediction model. (Trained by predicting noise).
|
| 197 |
+
|
| 198 |
+
2. "x_start": data prediction model. (Trained by predicting the data x_0 at time 0).
|
| 199 |
+
|
| 200 |
+
3. "v": velocity prediction model. (Trained by predicting the velocity).
|
| 201 |
+
The "v" prediction is derivation detailed in Appendix D of [1], and is used in Imagen-Video [2].
|
| 202 |
+
|
| 203 |
+
[1] Salimans, Tim, and Jonathan Ho. "Progressive distillation for fast sampling of diffusion models."
|
| 204 |
+
arXiv preprint arXiv:2202.00512 (2022).
|
| 205 |
+
[2] Ho, Jonathan, et al. "Imagen Video: High Definition Video Generation with Diffusion Models."
|
| 206 |
+
arXiv preprint arXiv:2210.02303 (2022).
|
| 207 |
+
|
| 208 |
+
4. "score": marginal score function. (Trained by denoising score matching).
|
| 209 |
+
Note that the score function and the noise prediction model follows a simple relationship:
|
| 210 |
+
```
|
| 211 |
+
noise(x_t, t) = -sigma_t * score(x_t, t)
|
| 212 |
+
```
|
| 213 |
+
|
| 214 |
+
We support three types of guided sampling by DPMs by setting `guidance_type`:
|
| 215 |
+
1. "uncond": unconditional sampling by DPMs.
|
| 216 |
+
The input `model` has the following format:
|
| 217 |
+
``
|
| 218 |
+
model(x, t_input, **model_kwargs) -> noise | x_start | v | score
|
| 219 |
+
``
|
| 220 |
+
|
| 221 |
+
2. "classifier": classifier guidance sampling [3] by DPMs and another classifier.
|
| 222 |
+
The input `model` has the following format:
|
| 223 |
+
``
|
| 224 |
+
model(x, t_input, **model_kwargs) -> noise | x_start | v | score
|
| 225 |
+
``
|
| 226 |
+
|
| 227 |
+
The input `classifier_fn` has the following format:
|
| 228 |
+
``
|
| 229 |
+
classifier_fn(x, t_input, cond, **classifier_kwargs) -> logits(x, t_input, cond)
|
| 230 |
+
``
|
| 231 |
+
|
| 232 |
+
[3] P. Dhariwal and A. Q. Nichol, "Diffusion models beat GANs on image synthesis,"
|
| 233 |
+
in Advances in Neural Information Processing Systems, vol. 34, 2021, pp. 8780-8794.
|
| 234 |
+
|
| 235 |
+
3. "classifier-free": classifier-free guidance sampling by conditional DPMs.
|
| 236 |
+
The input `model` has the following format:
|
| 237 |
+
``
|
| 238 |
+
model(x, t_input, cond, **model_kwargs) -> noise | x_start | v | score
|
| 239 |
+
``
|
| 240 |
+
And if cond == `unconditional_condition`, the model output is the unconditional DPM output.
|
| 241 |
+
|
| 242 |
+
[4] Ho, Jonathan, and Tim Salimans. "Classifier-free diffusion guidance."
|
| 243 |
+
arXiv preprint arXiv:2207.12598 (2022).
|
| 244 |
+
|
| 245 |
+
|
| 246 |
+
The `t_input` is the time label of the model, which may be discrete-time labels (i.e. 0 to 999)
|
| 247 |
+
or continuous-time labels (i.e. epsilon to T).
|
| 248 |
+
|
| 249 |
+
We wrap the model function to accept only `x` and `t_continuous` as inputs, and outputs the predicted noise:
|
| 250 |
+
``
|
| 251 |
+
def model_fn(x, t_continuous) -> noise:
|
| 252 |
+
t_input = get_model_input_time(t_continuous)
|
| 253 |
+
return noise_pred(model, x, t_input, **model_kwargs)
|
| 254 |
+
``
|
| 255 |
+
where `t_continuous` is the continuous time labels (i.e. epsilon to T). And we use `model_fn` for DPM-Solver.
|
| 256 |
+
|
| 257 |
+
===============================================================
|
| 258 |
+
|
| 259 |
+
Args:
|
| 260 |
+
model: A diffusion model with the corresponding format described above.
|
| 261 |
+
noise_schedule: A noise schedule object, such as NoiseScheduleVP.
|
| 262 |
+
model_type: A `str`. The parameterization type of the diffusion model.
|
| 263 |
+
"noise" or "x_start" or "v" or "score".
|
| 264 |
+
model_kwargs: A `dict`. A dict for the other inputs of the model function.
|
| 265 |
+
guidance_type: A `str`. The type of the guidance for sampling.
|
| 266 |
+
"uncond" or "classifier" or "classifier-free".
|
| 267 |
+
condition: A pytorch tensor. The condition for the guided sampling.
|
| 268 |
+
Only used for "classifier" or "classifier-free" guidance type.
|
| 269 |
+
unconditional_condition: A pytorch tensor. The condition for the unconditional sampling.
|
| 270 |
+
Only used for "classifier-free" guidance type.
|
| 271 |
+
guidance_scale: A `float`. The scale for the guided sampling.
|
| 272 |
+
classifier_fn: A classifier function. Only used for the classifier guidance.
|
| 273 |
+
classifier_kwargs: A `dict`. A dict for the other inputs of the classifier function.
|
| 274 |
+
Returns:
|
| 275 |
+
A noise prediction model that accepts the noised data and the continuous time as the inputs.
|
| 276 |
+
"""
|
| 277 |
+
|
| 278 |
+
def get_model_input_time(t_continuous):
|
| 279 |
+
"""
|
| 280 |
+
Convert the continuous-time `t_continuous` (in [epsilon, T]) to the model input time.
|
| 281 |
+
For discrete-time DPMs, we convert `t_continuous` in [1 / N, 1] to `t_input` in [0, 1000 * (N - 1) / N].
|
| 282 |
+
For continuous-time DPMs, we just use `t_continuous`.
|
| 283 |
+
"""
|
| 284 |
+
if noise_schedule.schedule == 'discrete':
|
| 285 |
+
return (t_continuous - 1. / noise_schedule.total_N) * 1000.
|
| 286 |
+
else:
|
| 287 |
+
return t_continuous
|
| 288 |
+
|
| 289 |
+
def noise_pred_fn(x, t_continuous, cond=None):
|
| 290 |
+
if t_continuous.reshape((-1,)).shape[0] == 1:
|
| 291 |
+
t_continuous = t_continuous.expand((x.shape[0]))
|
| 292 |
+
t_input = get_model_input_time(t_continuous)
|
| 293 |
+
if cond is None:
|
| 294 |
+
output = model(x, t_input, **model_kwargs)
|
| 295 |
+
else:
|
| 296 |
+
output = model(x, t_input, cond, **model_kwargs)
|
| 297 |
+
if model_type == "noise":
|
| 298 |
+
return output
|
| 299 |
+
elif model_type == "x_start":
|
| 300 |
+
alpha_t, sigma_t = noise_schedule.marginal_alpha(t_continuous), noise_schedule.marginal_std(t_continuous)
|
| 301 |
+
dims = x.dim()
|
| 302 |
+
return (x - expand_dims(alpha_t, dims) * output) / expand_dims(sigma_t, dims)
|
| 303 |
+
elif model_type == "v":
|
| 304 |
+
alpha_t, sigma_t = noise_schedule.marginal_alpha(t_continuous), noise_schedule.marginal_std(t_continuous)
|
| 305 |
+
dims = x.dim()
|
| 306 |
+
return expand_dims(alpha_t, dims) * output + expand_dims(sigma_t, dims) * x
|
| 307 |
+
elif model_type == "score":
|
| 308 |
+
sigma_t = noise_schedule.marginal_std(t_continuous)
|
| 309 |
+
dims = x.dim()
|
| 310 |
+
return -expand_dims(sigma_t, dims) * output
|
| 311 |
+
|
| 312 |
+
def cond_grad_fn(x, t_input):
|
| 313 |
+
"""
|
| 314 |
+
Compute the gradient of the classifier, i.e. nabla_{x} log p_t(cond | x_t).
|
| 315 |
+
"""
|
| 316 |
+
with torch.enable_grad():
|
| 317 |
+
x_in = x.detach().requires_grad_(True)
|
| 318 |
+
log_prob = classifier_fn(x_in, t_input, condition, **classifier_kwargs)
|
| 319 |
+
return torch.autograd.grad(log_prob.sum(), x_in)[0]
|
| 320 |
+
|
| 321 |
+
def model_fn(x, t_continuous):
|
| 322 |
+
"""
|
| 323 |
+
The noise predicition model function that is used for DPM-Solver.
|
| 324 |
+
"""
|
| 325 |
+
if t_continuous.reshape((-1,)).shape[0] == 1:
|
| 326 |
+
t_continuous = t_continuous.expand((x.shape[0]))
|
| 327 |
+
if guidance_type == "uncond":
|
| 328 |
+
return noise_pred_fn(x, t_continuous)
|
| 329 |
+
elif guidance_type == "classifier":
|
| 330 |
+
assert classifier_fn is not None
|
| 331 |
+
t_input = get_model_input_time(t_continuous)
|
| 332 |
+
cond_grad = cond_grad_fn(x, t_input)
|
| 333 |
+
sigma_t = noise_schedule.marginal_std(t_continuous)
|
| 334 |
+
noise = noise_pred_fn(x, t_continuous)
|
| 335 |
+
return noise - guidance_scale * expand_dims(sigma_t, dims=cond_grad.dim()) * cond_grad
|
| 336 |
+
elif guidance_type == "classifier-free":
|
| 337 |
+
if guidance_scale == 1. or unconditional_condition is None:
|
| 338 |
+
return noise_pred_fn(x, t_continuous, cond=condition)
|
| 339 |
+
else:
|
| 340 |
+
x_in = torch.cat([x] * 2)
|
| 341 |
+
t_in = torch.cat([t_continuous] * 2)
|
| 342 |
+
c_in = torch.cat([unconditional_condition, condition])
|
| 343 |
+
noise_uncond, noise = noise_pred_fn(x_in, t_in, cond=c_in).chunk(2)
|
| 344 |
+
return noise_uncond + guidance_scale * (noise - noise_uncond)
|
| 345 |
+
|
| 346 |
+
assert model_type in ["noise", "x_start", "v"]
|
| 347 |
+
assert guidance_type in ["uncond", "classifier", "classifier-free"]
|
| 348 |
+
return model_fn
|
| 349 |
+
|
| 350 |
+
|
| 351 |
+
class DPM_Solver:
|
| 352 |
+
def __init__(self, model_fn, noise_schedule, predict_x0=False, thresholding=False, max_val=1.):
|
| 353 |
+
"""Construct a DPM-Solver.
|
| 354 |
+
|
| 355 |
+
We support both the noise prediction model ("predicting epsilon") and the data prediction model ("predicting x0").
|
| 356 |
+
If `predict_x0` is False, we use the solver for the noise prediction model (DPM-Solver).
|
| 357 |
+
If `predict_x0` is True, we use the solver for the data prediction model (DPM-Solver++).
|
| 358 |
+
In such case, we further support the "dynamic thresholding" in [1] when `thresholding` is True.
|
| 359 |
+
The "dynamic thresholding" can greatly improve the sample quality for pixel-space DPMs with large guidance scales.
|
| 360 |
+
|
| 361 |
+
Args:
|
| 362 |
+
model_fn: A noise prediction model function which accepts the continuous-time input (t in [epsilon, T]):
|
| 363 |
+
``
|
| 364 |
+
def model_fn(x, t_continuous):
|
| 365 |
+
return noise
|
| 366 |
+
``
|
| 367 |
+
noise_schedule: A noise schedule object, such as NoiseScheduleVP.
|
| 368 |
+
predict_x0: A `bool`. If true, use the data prediction model; else, use the noise prediction model.
|
| 369 |
+
thresholding: A `bool`. Valid when `predict_x0` is True. Whether to use the "dynamic thresholding" in [1].
|
| 370 |
+
max_val: A `float`. Valid when both `predict_x0` and `thresholding` are True. The max value for thresholding.
|
| 371 |
+
|
| 372 |
+
[1] Chitwan Saharia, William Chan, Saurabh Saxena, Lala Li, Jay Whang, Emily Denton, Seyed Kamyar Seyed Ghasemipour, Burcu Karagol Ayan, S Sara Mahdavi, Rapha Gontijo Lopes, et al. Photorealistic text-to-image diffusion models with deep language understanding. arXiv preprint arXiv:2205.11487, 2022b.
|
| 373 |
+
"""
|
| 374 |
+
self.model = model_fn
|
| 375 |
+
self.noise_schedule = noise_schedule
|
| 376 |
+
self.predict_x0 = predict_x0
|
| 377 |
+
self.thresholding = thresholding
|
| 378 |
+
self.max_val = max_val
|
| 379 |
+
|
| 380 |
+
def noise_prediction_fn(self, x, t):
|
| 381 |
+
"""
|
| 382 |
+
Return the noise prediction model.
|
| 383 |
+
"""
|
| 384 |
+
return self.model(x, t)
|
| 385 |
+
|
| 386 |
+
def data_prediction_fn(self, x, t):
|
| 387 |
+
"""
|
| 388 |
+
Return the data prediction model (with thresholding).
|
| 389 |
+
"""
|
| 390 |
+
noise = self.noise_prediction_fn(x, t)
|
| 391 |
+
dims = x.dim()
|
| 392 |
+
alpha_t, sigma_t = self.noise_schedule.marginal_alpha(t), self.noise_schedule.marginal_std(t)
|
| 393 |
+
x0 = (x - expand_dims(sigma_t, dims) * noise) / expand_dims(alpha_t, dims)
|
| 394 |
+
if self.thresholding:
|
| 395 |
+
p = 0.995 # A hyperparameter in the paper of "Imagen" [1].
|
| 396 |
+
s = torch.quantile(torch.abs(x0).reshape((x0.shape[0], -1)), p, dim=1)
|
| 397 |
+
s = expand_dims(torch.maximum(s, self.max_val * torch.ones_like(s).to(s.device)), dims)
|
| 398 |
+
x0 = torch.clamp(x0, -s, s) / s
|
| 399 |
+
return x0
|
| 400 |
+
|
| 401 |
+
def model_fn(self, x, t):
|
| 402 |
+
"""
|
| 403 |
+
Convert the model to the noise prediction model or the data prediction model.
|
| 404 |
+
"""
|
| 405 |
+
if self.predict_x0:
|
| 406 |
+
return self.data_prediction_fn(x, t)
|
| 407 |
+
else:
|
| 408 |
+
return self.noise_prediction_fn(x, t)
|
| 409 |
+
|
| 410 |
+
def get_time_steps(self, skip_type, t_T, t_0, N, device):
|
| 411 |
+
"""Compute the intermediate time steps for sampling.
|
| 412 |
+
|
| 413 |
+
Args:
|
| 414 |
+
skip_type: A `str`. The type for the spacing of the time steps. We support three types:
|
| 415 |
+
- 'logSNR': uniform logSNR for the time steps.
|
| 416 |
+
- 'time_uniform': uniform time for the time steps. (**Recommended for high-resolutional data**.)
|
| 417 |
+
- 'time_quadratic': quadratic time for the time steps. (Used in DDIM for low-resolutional data.)
|
| 418 |
+
t_T: A `float`. The starting time of the sampling (default is T).
|
| 419 |
+
t_0: A `float`. The ending time of the sampling (default is epsilon).
|
| 420 |
+
N: A `int`. The total number of the spacing of the time steps.
|
| 421 |
+
device: A torch device.
|
| 422 |
+
Returns:
|
| 423 |
+
A pytorch tensor of the time steps, with the shape (N + 1,).
|
| 424 |
+
"""
|
| 425 |
+
if skip_type == 'logSNR':
|
| 426 |
+
lambda_T = self.noise_schedule.marginal_lambda(torch.tensor(t_T).to(device))
|
| 427 |
+
lambda_0 = self.noise_schedule.marginal_lambda(torch.tensor(t_0).to(device))
|
| 428 |
+
logSNR_steps = torch.linspace(lambda_T.cpu().item(), lambda_0.cpu().item(), N + 1).to(device)
|
| 429 |
+
return self.noise_schedule.inverse_lambda(logSNR_steps)
|
| 430 |
+
elif skip_type == 'time_uniform':
|
| 431 |
+
return torch.linspace(t_T, t_0, N + 1).to(device)
|
| 432 |
+
elif skip_type == 'time_quadratic':
|
| 433 |
+
t_order = 2
|
| 434 |
+
t = torch.linspace(t_T**(1. / t_order), t_0**(1. / t_order), N + 1).pow(t_order).to(device)
|
| 435 |
+
return t
|
| 436 |
+
else:
|
| 437 |
+
raise ValueError("Unsupported skip_type {}, need to be 'logSNR' or 'time_uniform' or 'time_quadratic'".format(skip_type))
|
| 438 |
+
|
| 439 |
+
def get_orders_and_timesteps_for_singlestep_solver(self, steps, order, skip_type, t_T, t_0, device):
|
| 440 |
+
"""
|
| 441 |
+
Get the order of each step for sampling by the singlestep DPM-Solver.
|
| 442 |
+
|
| 443 |
+
We combine both DPM-Solver-1,2,3 to use all the function evaluations, which is named as "DPM-Solver-fast".
|
| 444 |
+
Given a fixed number of function evaluations by `steps`, the sampling procedure by DPM-Solver-fast is:
|
| 445 |
+
- If order == 1:
|
| 446 |
+
We take `steps` of DPM-Solver-1 (i.e. DDIM).
|
| 447 |
+
- If order == 2:
|
| 448 |
+
- Denote K = (steps // 2). We take K or (K + 1) intermediate time steps for sampling.
|
| 449 |
+
- If steps % 2 == 0, we use K steps of DPM-Solver-2.
|
| 450 |
+
- If steps % 2 == 1, we use K steps of DPM-Solver-2 and 1 step of DPM-Solver-1.
|
| 451 |
+
- If order == 3:
|
| 452 |
+
- Denote K = (steps // 3 + 1). We take K intermediate time steps for sampling.
|
| 453 |
+
- If steps % 3 == 0, we use (K - 2) steps of DPM-Solver-3, and 1 step of DPM-Solver-2 and 1 step of DPM-Solver-1.
|
| 454 |
+
- If steps % 3 == 1, we use (K - 1) steps of DPM-Solver-3 and 1 step of DPM-Solver-1.
|
| 455 |
+
- If steps % 3 == 2, we use (K - 1) steps of DPM-Solver-3 and 1 step of DPM-Solver-2.
|
| 456 |
+
|
| 457 |
+
============================================
|
| 458 |
+
Args:
|
| 459 |
+
order: A `int`. The max order for the solver (2 or 3).
|
| 460 |
+
steps: A `int`. The total number of function evaluations (NFE).
|
| 461 |
+
skip_type: A `str`. The type for the spacing of the time steps. We support three types:
|
| 462 |
+
- 'logSNR': uniform logSNR for the time steps.
|
| 463 |
+
- 'time_uniform': uniform time for the time steps. (**Recommended for high-resolutional data**.)
|
| 464 |
+
- 'time_quadratic': quadratic time for the time steps. (Used in DDIM for low-resolutional data.)
|
| 465 |
+
t_T: A `float`. The starting time of the sampling (default is T).
|
| 466 |
+
t_0: A `float`. The ending time of the sampling (default is epsilon).
|
| 467 |
+
device: A torch device.
|
| 468 |
+
Returns:
|
| 469 |
+
orders: A list of the solver order of each step.
|
| 470 |
+
"""
|
| 471 |
+
if order == 3:
|
| 472 |
+
K = steps // 3 + 1
|
| 473 |
+
if steps % 3 == 0:
|
| 474 |
+
orders = [3,] * (K - 2) + [2, 1]
|
| 475 |
+
elif steps % 3 == 1:
|
| 476 |
+
orders = [3,] * (K - 1) + [1]
|
| 477 |
+
else:
|
| 478 |
+
orders = [3,] * (K - 1) + [2]
|
| 479 |
+
elif order == 2:
|
| 480 |
+
if steps % 2 == 0:
|
| 481 |
+
K = steps // 2
|
| 482 |
+
orders = [2,] * K
|
| 483 |
+
else:
|
| 484 |
+
K = steps // 2 + 1
|
| 485 |
+
orders = [2,] * (K - 1) + [1]
|
| 486 |
+
elif order == 1:
|
| 487 |
+
K = 1
|
| 488 |
+
orders = [1,] * steps
|
| 489 |
+
else:
|
| 490 |
+
raise ValueError("'order' must be '1' or '2' or '3'.")
|
| 491 |
+
if skip_type == 'logSNR':
|
| 492 |
+
# To reproduce the results in DPM-Solver paper
|
| 493 |
+
timesteps_outer = self.get_time_steps(skip_type, t_T, t_0, K, device)
|
| 494 |
+
else:
|
| 495 |
+
timesteps_outer = self.get_time_steps(skip_type, t_T, t_0, steps, device)[torch.cumsum(torch.tensor([0,] + orders)).to(device)]
|
| 496 |
+
return timesteps_outer, orders
|
| 497 |
+
|
| 498 |
+
def denoise_to_zero_fn(self, x, s):
|
| 499 |
+
"""
|
| 500 |
+
Denoise at the final step, which is equivalent to solve the ODE from lambda_s to infty by first-order discretization.
|
| 501 |
+
"""
|
| 502 |
+
return self.data_prediction_fn(x, s)
|
| 503 |
+
|
| 504 |
+
def dpm_solver_first_update(self, x, s, t, model_s=None, return_intermediate=False):
|
| 505 |
+
"""
|
| 506 |
+
DPM-Solver-1 (equivalent to DDIM) from time `s` to time `t`.
|
| 507 |
+
|
| 508 |
+
Args:
|
| 509 |
+
x: A pytorch tensor. The initial value at time `s`.
|
| 510 |
+
s: A pytorch tensor. The starting time, with the shape (x.shape[0],).
|
| 511 |
+
t: A pytorch tensor. The ending time, with the shape (x.shape[0],).
|
| 512 |
+
model_s: A pytorch tensor. The model function evaluated at time `s`.
|
| 513 |
+
If `model_s` is None, we evaluate the model by `x` and `s`; otherwise we directly use it.
|
| 514 |
+
return_intermediate: A `bool`. If true, also return the model value at time `s`.
|
| 515 |
+
Returns:
|
| 516 |
+
x_t: A pytorch tensor. The approximated solution at time `t`.
|
| 517 |
+
"""
|
| 518 |
+
ns = self.noise_schedule
|
| 519 |
+
dims = x.dim()
|
| 520 |
+
lambda_s, lambda_t = ns.marginal_lambda(s), ns.marginal_lambda(t)
|
| 521 |
+
h = lambda_t - lambda_s
|
| 522 |
+
log_alpha_s, log_alpha_t = ns.marginal_log_mean_coeff(s), ns.marginal_log_mean_coeff(t)
|
| 523 |
+
sigma_s, sigma_t = ns.marginal_std(s), ns.marginal_std(t)
|
| 524 |
+
alpha_t = torch.exp(log_alpha_t)
|
| 525 |
+
|
| 526 |
+
if self.predict_x0:
|
| 527 |
+
phi_1 = torch.expm1(-h)
|
| 528 |
+
if model_s is None:
|
| 529 |
+
model_s = self.model_fn(x, s)
|
| 530 |
+
x_t = (
|
| 531 |
+
expand_dims(sigma_t / sigma_s, dims) * x
|
| 532 |
+
- expand_dims(alpha_t * phi_1, dims) * model_s
|
| 533 |
+
)
|
| 534 |
+
if return_intermediate:
|
| 535 |
+
return x_t, {'model_s': model_s}
|
| 536 |
+
else:
|
| 537 |
+
return x_t
|
| 538 |
+
else:
|
| 539 |
+
phi_1 = torch.expm1(h)
|
| 540 |
+
if model_s is None:
|
| 541 |
+
model_s = self.model_fn(x, s)
|
| 542 |
+
x_t = (
|
| 543 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_s), dims) * x
|
| 544 |
+
- expand_dims(sigma_t * phi_1, dims) * model_s
|
| 545 |
+
)
|
| 546 |
+
if return_intermediate:
|
| 547 |
+
return x_t, {'model_s': model_s}
|
| 548 |
+
else:
|
| 549 |
+
return x_t
|
| 550 |
+
|
| 551 |
+
def singlestep_dpm_solver_second_update(self, x, s, t, r1=0.5, model_s=None, return_intermediate=False, solver_type='dpm_solver'):
|
| 552 |
+
"""
|
| 553 |
+
Singlestep solver DPM-Solver-2 from time `s` to time `t`.
|
| 554 |
+
|
| 555 |
+
Args:
|
| 556 |
+
x: A pytorch tensor. The initial value at time `s`.
|
| 557 |
+
s: A pytorch tensor. The starting time, with the shape (x.shape[0],).
|
| 558 |
+
t: A pytorch tensor. The ending time, with the shape (x.shape[0],).
|
| 559 |
+
r1: A `float`. The hyperparameter of the second-order solver.
|
| 560 |
+
model_s: A pytorch tensor. The model function evaluated at time `s`.
|
| 561 |
+
If `model_s` is None, we evaluate the model by `x` and `s`; otherwise we directly use it.
|
| 562 |
+
return_intermediate: A `bool`. If true, also return the model value at time `s` and `s1` (the intermediate time).
|
| 563 |
+
solver_type: either 'dpm_solver' or 'taylor'. The type for the high-order solvers.
|
| 564 |
+
The type slightly impacts the performance. We recommend to use 'dpm_solver' type.
|
| 565 |
+
Returns:
|
| 566 |
+
x_t: A pytorch tensor. The approximated solution at time `t`.
|
| 567 |
+
"""
|
| 568 |
+
if solver_type not in ['dpm_solver', 'taylor']:
|
| 569 |
+
raise ValueError("'solver_type' must be either 'dpm_solver' or 'taylor', got {}".format(solver_type))
|
| 570 |
+
if r1 is None:
|
| 571 |
+
r1 = 0.5
|
| 572 |
+
ns = self.noise_schedule
|
| 573 |
+
dims = x.dim()
|
| 574 |
+
lambda_s, lambda_t = ns.marginal_lambda(s), ns.marginal_lambda(t)
|
| 575 |
+
h = lambda_t - lambda_s
|
| 576 |
+
lambda_s1 = lambda_s + r1 * h
|
| 577 |
+
s1 = ns.inverse_lambda(lambda_s1)
|
| 578 |
+
log_alpha_s, log_alpha_s1, log_alpha_t = ns.marginal_log_mean_coeff(s), ns.marginal_log_mean_coeff(s1), ns.marginal_log_mean_coeff(t)
|
| 579 |
+
sigma_s, sigma_s1, sigma_t = ns.marginal_std(s), ns.marginal_std(s1), ns.marginal_std(t)
|
| 580 |
+
alpha_s1, alpha_t = torch.exp(log_alpha_s1), torch.exp(log_alpha_t)
|
| 581 |
+
|
| 582 |
+
if self.predict_x0:
|
| 583 |
+
phi_11 = torch.expm1(-r1 * h)
|
| 584 |
+
phi_1 = torch.expm1(-h)
|
| 585 |
+
|
| 586 |
+
if model_s is None:
|
| 587 |
+
model_s = self.model_fn(x, s)
|
| 588 |
+
x_s1 = (
|
| 589 |
+
expand_dims(sigma_s1 / sigma_s, dims) * x
|
| 590 |
+
- expand_dims(alpha_s1 * phi_11, dims) * model_s
|
| 591 |
+
)
|
| 592 |
+
model_s1 = self.model_fn(x_s1, s1)
|
| 593 |
+
if solver_type == 'dpm_solver':
|
| 594 |
+
x_t = (
|
| 595 |
+
expand_dims(sigma_t / sigma_s, dims) * x
|
| 596 |
+
- expand_dims(alpha_t * phi_1, dims) * model_s
|
| 597 |
+
- (0.5 / r1) * expand_dims(alpha_t * phi_1, dims) * (model_s1 - model_s)
|
| 598 |
+
)
|
| 599 |
+
elif solver_type == 'taylor':
|
| 600 |
+
x_t = (
|
| 601 |
+
expand_dims(sigma_t / sigma_s, dims) * x
|
| 602 |
+
- expand_dims(alpha_t * phi_1, dims) * model_s
|
| 603 |
+
+ (1. / r1) * expand_dims(alpha_t * ((torch.exp(-h) - 1.) / h + 1.), dims) * (model_s1 - model_s)
|
| 604 |
+
)
|
| 605 |
+
else:
|
| 606 |
+
phi_11 = torch.expm1(r1 * h)
|
| 607 |
+
phi_1 = torch.expm1(h)
|
| 608 |
+
|
| 609 |
+
if model_s is None:
|
| 610 |
+
model_s = self.model_fn(x, s)
|
| 611 |
+
x_s1 = (
|
| 612 |
+
expand_dims(torch.exp(log_alpha_s1 - log_alpha_s), dims) * x
|
| 613 |
+
- expand_dims(sigma_s1 * phi_11, dims) * model_s
|
| 614 |
+
)
|
| 615 |
+
model_s1 = self.model_fn(x_s1, s1)
|
| 616 |
+
if solver_type == 'dpm_solver':
|
| 617 |
+
x_t = (
|
| 618 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_s), dims) * x
|
| 619 |
+
- expand_dims(sigma_t * phi_1, dims) * model_s
|
| 620 |
+
- (0.5 / r1) * expand_dims(sigma_t * phi_1, dims) * (model_s1 - model_s)
|
| 621 |
+
)
|
| 622 |
+
elif solver_type == 'taylor':
|
| 623 |
+
x_t = (
|
| 624 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_s), dims) * x
|
| 625 |
+
- expand_dims(sigma_t * phi_1, dims) * model_s
|
| 626 |
+
- (1. / r1) * expand_dims(sigma_t * ((torch.exp(h) - 1.) / h - 1.), dims) * (model_s1 - model_s)
|
| 627 |
+
)
|
| 628 |
+
if return_intermediate:
|
| 629 |
+
return x_t, {'model_s': model_s, 'model_s1': model_s1}
|
| 630 |
+
else:
|
| 631 |
+
return x_t
|
| 632 |
+
|
| 633 |
+
def singlestep_dpm_solver_third_update(self, x, s, t, r1=1./3., r2=2./3., model_s=None, model_s1=None, return_intermediate=False, solver_type='dpm_solver'):
|
| 634 |
+
"""
|
| 635 |
+
Singlestep solver DPM-Solver-3 from time `s` to time `t`.
|
| 636 |
+
|
| 637 |
+
Args:
|
| 638 |
+
x: A pytorch tensor. The initial value at time `s`.
|
| 639 |
+
s: A pytorch tensor. The starting time, with the shape (x.shape[0],).
|
| 640 |
+
t: A pytorch tensor. The ending time, with the shape (x.shape[0],).
|
| 641 |
+
r1: A `float`. The hyperparameter of the third-order solver.
|
| 642 |
+
r2: A `float`. The hyperparameter of the third-order solver.
|
| 643 |
+
model_s: A pytorch tensor. The model function evaluated at time `s`.
|
| 644 |
+
If `model_s` is None, we evaluate the model by `x` and `s`; otherwise we directly use it.
|
| 645 |
+
model_s1: A pytorch tensor. The model function evaluated at time `s1` (the intermediate time given by `r1`).
|
| 646 |
+
If `model_s1` is None, we evaluate the model at `s1`; otherwise we directly use it.
|
| 647 |
+
return_intermediate: A `bool`. If true, also return the model value at time `s`, `s1` and `s2` (the intermediate times).
|
| 648 |
+
solver_type: either 'dpm_solver' or 'taylor'. The type for the high-order solvers.
|
| 649 |
+
The type slightly impacts the performance. We recommend to use 'dpm_solver' type.
|
| 650 |
+
Returns:
|
| 651 |
+
x_t: A pytorch tensor. The approximated solution at time `t`.
|
| 652 |
+
"""
|
| 653 |
+
if solver_type not in ['dpm_solver', 'taylor']:
|
| 654 |
+
raise ValueError("'solver_type' must be either 'dpm_solver' or 'taylor', got {}".format(solver_type))
|
| 655 |
+
if r1 is None:
|
| 656 |
+
r1 = 1. / 3.
|
| 657 |
+
if r2 is None:
|
| 658 |
+
r2 = 2. / 3.
|
| 659 |
+
ns = self.noise_schedule
|
| 660 |
+
dims = x.dim()
|
| 661 |
+
lambda_s, lambda_t = ns.marginal_lambda(s), ns.marginal_lambda(t)
|
| 662 |
+
h = lambda_t - lambda_s
|
| 663 |
+
lambda_s1 = lambda_s + r1 * h
|
| 664 |
+
lambda_s2 = lambda_s + r2 * h
|
| 665 |
+
s1 = ns.inverse_lambda(lambda_s1)
|
| 666 |
+
s2 = ns.inverse_lambda(lambda_s2)
|
| 667 |
+
log_alpha_s, log_alpha_s1, log_alpha_s2, log_alpha_t = ns.marginal_log_mean_coeff(s), ns.marginal_log_mean_coeff(s1), ns.marginal_log_mean_coeff(s2), ns.marginal_log_mean_coeff(t)
|
| 668 |
+
sigma_s, sigma_s1, sigma_s2, sigma_t = ns.marginal_std(s), ns.marginal_std(s1), ns.marginal_std(s2), ns.marginal_std(t)
|
| 669 |
+
alpha_s1, alpha_s2, alpha_t = torch.exp(log_alpha_s1), torch.exp(log_alpha_s2), torch.exp(log_alpha_t)
|
| 670 |
+
|
| 671 |
+
if self.predict_x0:
|
| 672 |
+
phi_11 = torch.expm1(-r1 * h)
|
| 673 |
+
phi_12 = torch.expm1(-r2 * h)
|
| 674 |
+
phi_1 = torch.expm1(-h)
|
| 675 |
+
phi_22 = torch.expm1(-r2 * h) / (r2 * h) + 1.
|
| 676 |
+
phi_2 = phi_1 / h + 1.
|
| 677 |
+
phi_3 = phi_2 / h - 0.5
|
| 678 |
+
|
| 679 |
+
if model_s is None:
|
| 680 |
+
model_s = self.model_fn(x, s)
|
| 681 |
+
if model_s1 is None:
|
| 682 |
+
x_s1 = (
|
| 683 |
+
expand_dims(sigma_s1 / sigma_s, dims) * x
|
| 684 |
+
- expand_dims(alpha_s1 * phi_11, dims) * model_s
|
| 685 |
+
)
|
| 686 |
+
model_s1 = self.model_fn(x_s1, s1)
|
| 687 |
+
x_s2 = (
|
| 688 |
+
expand_dims(sigma_s2 / sigma_s, dims) * x
|
| 689 |
+
- expand_dims(alpha_s2 * phi_12, dims) * model_s
|
| 690 |
+
+ r2 / r1 * expand_dims(alpha_s2 * phi_22, dims) * (model_s1 - model_s)
|
| 691 |
+
)
|
| 692 |
+
model_s2 = self.model_fn(x_s2, s2)
|
| 693 |
+
if solver_type == 'dpm_solver':
|
| 694 |
+
x_t = (
|
| 695 |
+
expand_dims(sigma_t / sigma_s, dims) * x
|
| 696 |
+
- expand_dims(alpha_t * phi_1, dims) * model_s
|
| 697 |
+
+ (1. / r2) * expand_dims(alpha_t * phi_2, dims) * (model_s2 - model_s)
|
| 698 |
+
)
|
| 699 |
+
elif solver_type == 'taylor':
|
| 700 |
+
D1_0 = (1. / r1) * (model_s1 - model_s)
|
| 701 |
+
D1_1 = (1. / r2) * (model_s2 - model_s)
|
| 702 |
+
D1 = (r2 * D1_0 - r1 * D1_1) / (r2 - r1)
|
| 703 |
+
D2 = 2. * (D1_1 - D1_0) / (r2 - r1)
|
| 704 |
+
x_t = (
|
| 705 |
+
expand_dims(sigma_t / sigma_s, dims) * x
|
| 706 |
+
- expand_dims(alpha_t * phi_1, dims) * model_s
|
| 707 |
+
+ expand_dims(alpha_t * phi_2, dims) * D1
|
| 708 |
+
- expand_dims(alpha_t * phi_3, dims) * D2
|
| 709 |
+
)
|
| 710 |
+
else:
|
| 711 |
+
phi_11 = torch.expm1(r1 * h)
|
| 712 |
+
phi_12 = torch.expm1(r2 * h)
|
| 713 |
+
phi_1 = torch.expm1(h)
|
| 714 |
+
phi_22 = torch.expm1(r2 * h) / (r2 * h) - 1.
|
| 715 |
+
phi_2 = phi_1 / h - 1.
|
| 716 |
+
phi_3 = phi_2 / h - 0.5
|
| 717 |
+
|
| 718 |
+
if model_s is None:
|
| 719 |
+
model_s = self.model_fn(x, s)
|
| 720 |
+
if model_s1 is None:
|
| 721 |
+
x_s1 = (
|
| 722 |
+
expand_dims(torch.exp(log_alpha_s1 - log_alpha_s), dims) * x
|
| 723 |
+
- expand_dims(sigma_s1 * phi_11, dims) * model_s
|
| 724 |
+
)
|
| 725 |
+
model_s1 = self.model_fn(x_s1, s1)
|
| 726 |
+
x_s2 = (
|
| 727 |
+
expand_dims(torch.exp(log_alpha_s2 - log_alpha_s), dims) * x
|
| 728 |
+
- expand_dims(sigma_s2 * phi_12, dims) * model_s
|
| 729 |
+
- r2 / r1 * expand_dims(sigma_s2 * phi_22, dims) * (model_s1 - model_s)
|
| 730 |
+
)
|
| 731 |
+
model_s2 = self.model_fn(x_s2, s2)
|
| 732 |
+
if solver_type == 'dpm_solver':
|
| 733 |
+
x_t = (
|
| 734 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_s), dims) * x
|
| 735 |
+
- expand_dims(sigma_t * phi_1, dims) * model_s
|
| 736 |
+
- (1. / r2) * expand_dims(sigma_t * phi_2, dims) * (model_s2 - model_s)
|
| 737 |
+
)
|
| 738 |
+
elif solver_type == 'taylor':
|
| 739 |
+
D1_0 = (1. / r1) * (model_s1 - model_s)
|
| 740 |
+
D1_1 = (1. / r2) * (model_s2 - model_s)
|
| 741 |
+
D1 = (r2 * D1_0 - r1 * D1_1) / (r2 - r1)
|
| 742 |
+
D2 = 2. * (D1_1 - D1_0) / (r2 - r1)
|
| 743 |
+
x_t = (
|
| 744 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_s), dims) * x
|
| 745 |
+
- expand_dims(sigma_t * phi_1, dims) * model_s
|
| 746 |
+
- expand_dims(sigma_t * phi_2, dims) * D1
|
| 747 |
+
- expand_dims(sigma_t * phi_3, dims) * D2
|
| 748 |
+
)
|
| 749 |
+
|
| 750 |
+
if return_intermediate:
|
| 751 |
+
return x_t, {'model_s': model_s, 'model_s1': model_s1, 'model_s2': model_s2}
|
| 752 |
+
else:
|
| 753 |
+
return x_t
|
| 754 |
+
|
| 755 |
+
def multistep_dpm_solver_second_update(self, x, model_prev_list, t_prev_list, t, solver_type="dpm_solver"):
|
| 756 |
+
"""
|
| 757 |
+
Multistep solver DPM-Solver-2 from time `t_prev_list[-1]` to time `t`.
|
| 758 |
+
|
| 759 |
+
Args:
|
| 760 |
+
x: A pytorch tensor. The initial value at time `s`.
|
| 761 |
+
model_prev_list: A list of pytorch tensor. The previous computed model values.
|
| 762 |
+
t_prev_list: A list of pytorch tensor. The previous times, each time has the shape (x.shape[0],)
|
| 763 |
+
t: A pytorch tensor. The ending time, with the shape (x.shape[0],).
|
| 764 |
+
solver_type: either 'dpm_solver' or 'taylor'. The type for the high-order solvers.
|
| 765 |
+
The type slightly impacts the performance. We recommend to use 'dpm_solver' type.
|
| 766 |
+
Returns:
|
| 767 |
+
x_t: A pytorch tensor. The approximated solution at time `t`.
|
| 768 |
+
"""
|
| 769 |
+
if solver_type not in ['dpm_solver', 'taylor']:
|
| 770 |
+
raise ValueError("'solver_type' must be either 'dpm_solver' or 'taylor', got {}".format(solver_type))
|
| 771 |
+
ns = self.noise_schedule
|
| 772 |
+
dims = x.dim()
|
| 773 |
+
model_prev_1, model_prev_0 = model_prev_list
|
| 774 |
+
t_prev_1, t_prev_0 = t_prev_list
|
| 775 |
+
lambda_prev_1, lambda_prev_0, lambda_t = ns.marginal_lambda(t_prev_1), ns.marginal_lambda(t_prev_0), ns.marginal_lambda(t)
|
| 776 |
+
log_alpha_prev_0, log_alpha_t = ns.marginal_log_mean_coeff(t_prev_0), ns.marginal_log_mean_coeff(t)
|
| 777 |
+
sigma_prev_0, sigma_t = ns.marginal_std(t_prev_0), ns.marginal_std(t)
|
| 778 |
+
alpha_t = torch.exp(log_alpha_t)
|
| 779 |
+
|
| 780 |
+
h_0 = lambda_prev_0 - lambda_prev_1
|
| 781 |
+
h = lambda_t - lambda_prev_0
|
| 782 |
+
r0 = h_0 / h
|
| 783 |
+
D1_0 = expand_dims(1. / r0, dims) * (model_prev_0 - model_prev_1)
|
| 784 |
+
if self.predict_x0:
|
| 785 |
+
if solver_type == 'dpm_solver':
|
| 786 |
+
x_t = (
|
| 787 |
+
expand_dims(sigma_t / sigma_prev_0, dims) * x
|
| 788 |
+
- expand_dims(alpha_t * (torch.exp(-h) - 1.), dims) * model_prev_0
|
| 789 |
+
- 0.5 * expand_dims(alpha_t * (torch.exp(-h) - 1.), dims) * D1_0
|
| 790 |
+
)
|
| 791 |
+
elif solver_type == 'taylor':
|
| 792 |
+
x_t = (
|
| 793 |
+
expand_dims(sigma_t / sigma_prev_0, dims) * x
|
| 794 |
+
- expand_dims(alpha_t * (torch.exp(-h) - 1.), dims) * model_prev_0
|
| 795 |
+
+ expand_dims(alpha_t * ((torch.exp(-h) - 1.) / h + 1.), dims) * D1_0
|
| 796 |
+
)
|
| 797 |
+
else:
|
| 798 |
+
if solver_type == 'dpm_solver':
|
| 799 |
+
x_t = (
|
| 800 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_prev_0), dims) * x
|
| 801 |
+
- expand_dims(sigma_t * (torch.exp(h) - 1.), dims) * model_prev_0
|
| 802 |
+
- 0.5 * expand_dims(sigma_t * (torch.exp(h) - 1.), dims) * D1_0
|
| 803 |
+
)
|
| 804 |
+
elif solver_type == 'taylor':
|
| 805 |
+
x_t = (
|
| 806 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_prev_0), dims) * x
|
| 807 |
+
- expand_dims(sigma_t * (torch.exp(h) - 1.), dims) * model_prev_0
|
| 808 |
+
- expand_dims(sigma_t * ((torch.exp(h) - 1.) / h - 1.), dims) * D1_0
|
| 809 |
+
)
|
| 810 |
+
return x_t
|
| 811 |
+
|
| 812 |
+
def multistep_dpm_solver_third_update(self, x, model_prev_list, t_prev_list, t, solver_type='dpm_solver'):
|
| 813 |
+
"""
|
| 814 |
+
Multistep solver DPM-Solver-3 from time `t_prev_list[-1]` to time `t`.
|
| 815 |
+
|
| 816 |
+
Args:
|
| 817 |
+
x: A pytorch tensor. The initial value at time `s`.
|
| 818 |
+
model_prev_list: A list of pytorch tensor. The previous computed model values.
|
| 819 |
+
t_prev_list: A list of pytorch tensor. The previous times, each time has the shape (x.shape[0],)
|
| 820 |
+
t: A pytorch tensor. The ending time, with the shape (x.shape[0],).
|
| 821 |
+
solver_type: either 'dpm_solver' or 'taylor'. The type for the high-order solvers.
|
| 822 |
+
The type slightly impacts the performance. We recommend to use 'dpm_solver' type.
|
| 823 |
+
Returns:
|
| 824 |
+
x_t: A pytorch tensor. The approximated solution at time `t`.
|
| 825 |
+
"""
|
| 826 |
+
ns = self.noise_schedule
|
| 827 |
+
dims = x.dim()
|
| 828 |
+
model_prev_2, model_prev_1, model_prev_0 = model_prev_list
|
| 829 |
+
t_prev_2, t_prev_1, t_prev_0 = t_prev_list
|
| 830 |
+
lambda_prev_2, lambda_prev_1, lambda_prev_0, lambda_t = ns.marginal_lambda(t_prev_2), ns.marginal_lambda(t_prev_1), ns.marginal_lambda(t_prev_0), ns.marginal_lambda(t)
|
| 831 |
+
log_alpha_prev_0, log_alpha_t = ns.marginal_log_mean_coeff(t_prev_0), ns.marginal_log_mean_coeff(t)
|
| 832 |
+
sigma_prev_0, sigma_t = ns.marginal_std(t_prev_0), ns.marginal_std(t)
|
| 833 |
+
alpha_t = torch.exp(log_alpha_t)
|
| 834 |
+
|
| 835 |
+
h_1 = lambda_prev_1 - lambda_prev_2
|
| 836 |
+
h_0 = lambda_prev_0 - lambda_prev_1
|
| 837 |
+
h = lambda_t - lambda_prev_0
|
| 838 |
+
r0, r1 = h_0 / h, h_1 / h
|
| 839 |
+
D1_0 = expand_dims(1. / r0, dims) * (model_prev_0 - model_prev_1)
|
| 840 |
+
D1_1 = expand_dims(1. / r1, dims) * (model_prev_1 - model_prev_2)
|
| 841 |
+
D1 = D1_0 + expand_dims(r0 / (r0 + r1), dims) * (D1_0 - D1_1)
|
| 842 |
+
D2 = expand_dims(1. / (r0 + r1), dims) * (D1_0 - D1_1)
|
| 843 |
+
if self.predict_x0:
|
| 844 |
+
x_t = (
|
| 845 |
+
expand_dims(sigma_t / sigma_prev_0, dims) * x
|
| 846 |
+
- expand_dims(alpha_t * (torch.exp(-h) - 1.), dims) * model_prev_0
|
| 847 |
+
+ expand_dims(alpha_t * ((torch.exp(-h) - 1.) / h + 1.), dims) * D1
|
| 848 |
+
- expand_dims(alpha_t * ((torch.exp(-h) - 1. + h) / h**2 - 0.5), dims) * D2
|
| 849 |
+
)
|
| 850 |
+
else:
|
| 851 |
+
x_t = (
|
| 852 |
+
expand_dims(torch.exp(log_alpha_t - log_alpha_prev_0), dims) * x
|
| 853 |
+
- expand_dims(sigma_t * (torch.exp(h) - 1.), dims) * model_prev_0
|
| 854 |
+
- expand_dims(sigma_t * ((torch.exp(h) - 1.) / h - 1.), dims) * D1
|
| 855 |
+
- expand_dims(sigma_t * ((torch.exp(h) - 1. - h) / h**2 - 0.5), dims) * D2
|
| 856 |
+
)
|
| 857 |
+
return x_t
|
| 858 |
+
|
| 859 |
+
def singlestep_dpm_solver_update(self, x, s, t, order, return_intermediate=False, solver_type='dpm_solver', r1=None, r2=None):
|
| 860 |
+
"""
|
| 861 |
+
Singlestep DPM-Solver with the order `order` from time `s` to time `t`.
|
| 862 |
+
|
| 863 |
+
Args:
|
| 864 |
+
x: A pytorch tensor. The initial value at time `s`.
|
| 865 |
+
s: A pytorch tensor. The starting time, with the shape (x.shape[0],).
|
| 866 |
+
t: A pytorch tensor. The ending time, with the shape (x.shape[0],).
|
| 867 |
+
order: A `int`. The order of DPM-Solver. We only support order == 1 or 2 or 3.
|
| 868 |
+
return_intermediate: A `bool`. If true, also return the model value at time `s`, `s1` and `s2` (the intermediate times).
|
| 869 |
+
solver_type: either 'dpm_solver' or 'taylor'. The type for the high-order solvers.
|
| 870 |
+
The type slightly impacts the performance. We recommend to use 'dpm_solver' type.
|
| 871 |
+
r1: A `float`. The hyperparameter of the second-order or third-order solver.
|
| 872 |
+
r2: A `float`. The hyperparameter of the third-order solver.
|
| 873 |
+
Returns:
|
| 874 |
+
x_t: A pytorch tensor. The approximated solution at time `t`.
|
| 875 |
+
"""
|
| 876 |
+
if order == 1:
|
| 877 |
+
return self.dpm_solver_first_update(x, s, t, return_intermediate=return_intermediate)
|
| 878 |
+
elif order == 2:
|
| 879 |
+
return self.singlestep_dpm_solver_second_update(x, s, t, return_intermediate=return_intermediate, solver_type=solver_type, r1=r1)
|
| 880 |
+
elif order == 3:
|
| 881 |
+
return self.singlestep_dpm_solver_third_update(x, s, t, return_intermediate=return_intermediate, solver_type=solver_type, r1=r1, r2=r2)
|
| 882 |
+
else:
|
| 883 |
+
raise ValueError("Solver order must be 1 or 2 or 3, got {}".format(order))
|
| 884 |
+
|
| 885 |
+
def multistep_dpm_solver_update(self, x, model_prev_list, t_prev_list, t, order, solver_type='dpm_solver'):
|
| 886 |
+
"""
|
| 887 |
+
Multistep DPM-Solver with the order `order` from time `t_prev_list[-1]` to time `t`.
|
| 888 |
+
|
| 889 |
+
Args:
|
| 890 |
+
x: A pytorch tensor. The initial value at time `s`.
|
| 891 |
+
model_prev_list: A list of pytorch tensor. The previous computed model values.
|
| 892 |
+
t_prev_list: A list of pytorch tensor. The previous times, each time has the shape (x.shape[0],)
|
| 893 |
+
t: A pytorch tensor. The ending time, with the shape (x.shape[0],).
|
| 894 |
+
order: A `int`. The order of DPM-Solver. We only support order == 1 or 2 or 3.
|
| 895 |
+
solver_type: either 'dpm_solver' or 'taylor'. The type for the high-order solvers.
|
| 896 |
+
The type slightly impacts the performance. We recommend to use 'dpm_solver' type.
|
| 897 |
+
Returns:
|
| 898 |
+
x_t: A pytorch tensor. The approximated solution at time `t`.
|
| 899 |
+
"""
|
| 900 |
+
if order == 1:
|
| 901 |
+
return self.dpm_solver_first_update(x, t_prev_list[-1], t, model_s=model_prev_list[-1])
|
| 902 |
+
elif order == 2:
|
| 903 |
+
return self.multistep_dpm_solver_second_update(x, model_prev_list, t_prev_list, t, solver_type=solver_type)
|
| 904 |
+
elif order == 3:
|
| 905 |
+
return self.multistep_dpm_solver_third_update(x, model_prev_list, t_prev_list, t, solver_type=solver_type)
|
| 906 |
+
else:
|
| 907 |
+
raise ValueError("Solver order must be 1 or 2 or 3, got {}".format(order))
|
| 908 |
+
|
| 909 |
+
def dpm_solver_adaptive(self, x, order, t_T, t_0, h_init=0.05, atol=0.0078, rtol=0.05, theta=0.9, t_err=1e-5, solver_type='dpm_solver'):
|
| 910 |
+
"""
|
| 911 |
+
The adaptive step size solver based on singlestep DPM-Solver.
|
| 912 |
+
|
| 913 |
+
Args:
|
| 914 |
+
x: A pytorch tensor. The initial value at time `t_T`.
|
| 915 |
+
order: A `int`. The (higher) order of the solver. We only support order == 2 or 3.
|
| 916 |
+
t_T: A `float`. The starting time of the sampling (default is T).
|
| 917 |
+
t_0: A `float`. The ending time of the sampling (default is epsilon).
|
| 918 |
+
h_init: A `float`. The initial step size (for logSNR).
|
| 919 |
+
atol: A `float`. The absolute tolerance of the solver. For image data, the default setting is 0.0078, followed [1].
|
| 920 |
+
rtol: A `float`. The relative tolerance of the solver. The default setting is 0.05.
|
| 921 |
+
theta: A `float`. The safety hyperparameter for adapting the step size. The default setting is 0.9, followed [1].
|
| 922 |
+
t_err: A `float`. The tolerance for the time. We solve the diffusion ODE until the absolute error between the
|
| 923 |
+
current time and `t_0` is less than `t_err`. The default setting is 1e-5.
|
| 924 |
+
solver_type: either 'dpm_solver' or 'taylor'. The type for the high-order solvers.
|
| 925 |
+
The type slightly impacts the performance. We recommend to use 'dpm_solver' type.
|
| 926 |
+
Returns:
|
| 927 |
+
x_0: A pytorch tensor. The approximated solution at time `t_0`.
|
| 928 |
+
|
| 929 |
+
[1] A. Jolicoeur-Martineau, K. Li, R. Piché-Taillefer, T. Kachman, and I. Mitliagkas, "Gotta go fast when generating data with score-based models," arXiv preprint arXiv:2105.14080, 2021.
|
| 930 |
+
"""
|
| 931 |
+
ns = self.noise_schedule
|
| 932 |
+
s = t_T * torch.ones((x.shape[0],)).to(x)
|
| 933 |
+
lambda_s = ns.marginal_lambda(s)
|
| 934 |
+
lambda_0 = ns.marginal_lambda(t_0 * torch.ones_like(s).to(x))
|
| 935 |
+
h = h_init * torch.ones_like(s).to(x)
|
| 936 |
+
x_prev = x
|
| 937 |
+
nfe = 0
|
| 938 |
+
if order == 2:
|
| 939 |
+
r1 = 0.5
|
| 940 |
+
lower_update = lambda x, s, t: self.dpm_solver_first_update(x, s, t, return_intermediate=True)
|
| 941 |
+
higher_update = lambda x, s, t, **kwargs: self.singlestep_dpm_solver_second_update(x, s, t, r1=r1, solver_type=solver_type, **kwargs)
|
| 942 |
+
elif order == 3:
|
| 943 |
+
r1, r2 = 1. / 3., 2. / 3.
|
| 944 |
+
lower_update = lambda x, s, t: self.singlestep_dpm_solver_second_update(x, s, t, r1=r1, return_intermediate=True, solver_type=solver_type)
|
| 945 |
+
higher_update = lambda x, s, t, **kwargs: self.singlestep_dpm_solver_third_update(x, s, t, r1=r1, r2=r2, solver_type=solver_type, **kwargs)
|
| 946 |
+
else:
|
| 947 |
+
raise ValueError("For adaptive step size solver, order must be 2 or 3, got {}".format(order))
|
| 948 |
+
while torch.abs((s - t_0)).mean() > t_err:
|
| 949 |
+
t = ns.inverse_lambda(lambda_s + h)
|
| 950 |
+
x_lower, lower_noise_kwargs = lower_update(x, s, t)
|
| 951 |
+
x_higher = higher_update(x, s, t, **lower_noise_kwargs)
|
| 952 |
+
delta = torch.max(torch.ones_like(x).to(x) * atol, rtol * torch.max(torch.abs(x_lower), torch.abs(x_prev)))
|
| 953 |
+
norm_fn = lambda v: torch.sqrt(torch.square(v.reshape((v.shape[0], -1))).mean(dim=-1, keepdim=True))
|
| 954 |
+
E = norm_fn((x_higher - x_lower) / delta).max()
|
| 955 |
+
if torch.all(E <= 1.):
|
| 956 |
+
x = x_higher
|
| 957 |
+
s = t
|
| 958 |
+
x_prev = x_lower
|
| 959 |
+
lambda_s = ns.marginal_lambda(s)
|
| 960 |
+
h = torch.min(theta * h * torch.float_power(E, -1. / order).float(), lambda_0 - lambda_s)
|
| 961 |
+
nfe += order
|
| 962 |
+
print('adaptive solver nfe', nfe)
|
| 963 |
+
return x
|
| 964 |
+
|
| 965 |
+
def sample(self, x, steps=20, t_start=None, t_end=None, order=3, skip_type='time_uniform',
|
| 966 |
+
method='singlestep', lower_order_final=True, denoise_to_zero=False, solver_type='dpm_solver',
|
| 967 |
+
atol=0.0078, rtol=0.05,
|
| 968 |
+
):
|
| 969 |
+
"""
|
| 970 |
+
Compute the sample at time `t_end` by DPM-Solver, given the initial `x` at time `t_start`.
|
| 971 |
+
|
| 972 |
+
=====================================================
|
| 973 |
+
|
| 974 |
+
We support the following algorithms for both noise prediction model and data prediction model:
|
| 975 |
+
- 'singlestep':
|
| 976 |
+
Singlestep DPM-Solver (i.e. "DPM-Solver-fast" in the paper), which combines different orders of singlestep DPM-Solver.
|
| 977 |
+
We combine all the singlestep solvers with order <= `order` to use up all the function evaluations (steps).
|
| 978 |
+
The total number of function evaluations (NFE) == `steps`.
|
| 979 |
+
Given a fixed NFE == `steps`, the sampling procedure is:
|
| 980 |
+
- If `order` == 1:
|
| 981 |
+
- Denote K = steps. We use K steps of DPM-Solver-1 (i.e. DDIM).
|
| 982 |
+
- If `order` == 2:
|
| 983 |
+
- Denote K = (steps // 2) + (steps % 2). We take K intermediate time steps for sampling.
|
| 984 |
+
- If steps % 2 == 0, we use K steps of singlestep DPM-Solver-2.
|
| 985 |
+
- If steps % 2 == 1, we use (K - 1) steps of singlestep DPM-Solver-2 and 1 step of DPM-Solver-1.
|
| 986 |
+
- If `order` == 3:
|
| 987 |
+
- Denote K = (steps // 3 + 1). We take K intermediate time steps for sampling.
|
| 988 |
+
- If steps % 3 == 0, we use (K - 2) steps of singlestep DPM-Solver-3, and 1 step of singlestep DPM-Solver-2 and 1 step of DPM-Solver-1.
|
| 989 |
+
- If steps % 3 == 1, we use (K - 1) steps of singlestep DPM-Solver-3 and 1 step of DPM-Solver-1.
|
| 990 |
+
- If steps % 3 == 2, we use (K - 1) steps of singlestep DPM-Solver-3 and 1 step of singlestep DPM-Solver-2.
|
| 991 |
+
- 'multistep':
|
| 992 |
+
Multistep DPM-Solver with the order of `order`. The total number of function evaluations (NFE) == `steps`.
|
| 993 |
+
We initialize the first `order` values by lower order multistep solvers.
|
| 994 |
+
Given a fixed NFE == `steps`, the sampling procedure is:
|
| 995 |
+
Denote K = steps.
|
| 996 |
+
- If `order` == 1:
|
| 997 |
+
- We use K steps of DPM-Solver-1 (i.e. DDIM).
|
| 998 |
+
- If `order` == 2:
|
| 999 |
+
- We firstly use 1 step of DPM-Solver-1, then use (K - 1) step of multistep DPM-Solver-2.
|
| 1000 |
+
- If `order` == 3:
|
| 1001 |
+
- We firstly use 1 step of DPM-Solver-1, then 1 step of multistep DPM-Solver-2, then (K - 2) step of multistep DPM-Solver-3.
|
| 1002 |
+
- 'singlestep_fixed':
|
| 1003 |
+
Fixed order singlestep DPM-Solver (i.e. DPM-Solver-1 or singlestep DPM-Solver-2 or singlestep DPM-Solver-3).
|
| 1004 |
+
We use singlestep DPM-Solver-`order` for `order`=1 or 2 or 3, with total [`steps` // `order`] * `order` NFE.
|
| 1005 |
+
- 'adaptive':
|
| 1006 |
+
Adaptive step size DPM-Solver (i.e. "DPM-Solver-12" and "DPM-Solver-23" in the paper).
|
| 1007 |
+
We ignore `steps` and use adaptive step size DPM-Solver with a higher order of `order`.
|
| 1008 |
+
You can adjust the absolute tolerance `atol` and the relative tolerance `rtol` to balance the computatation costs
|
| 1009 |
+
(NFE) and the sample quality.
|
| 1010 |
+
- If `order` == 2, we use DPM-Solver-12 which combines DPM-Solver-1 and singlestep DPM-Solver-2.
|
| 1011 |
+
- If `order` == 3, we use DPM-Solver-23 which combines singlestep DPM-Solver-2 and singlestep DPM-Solver-3.
|
| 1012 |
+
|
| 1013 |
+
=====================================================
|
| 1014 |
+
|
| 1015 |
+
Some advices for choosing the algorithm:
|
| 1016 |
+
- For **unconditional sampling** or **guided sampling with small guidance scale** by DPMs:
|
| 1017 |
+
Use singlestep DPM-Solver ("DPM-Solver-fast" in the paper) with `order = 3`.
|
| 1018 |
+
e.g.
|
| 1019 |
+
>>> dpm_solver = DPM_Solver(model_fn, noise_schedule, predict_x0=False)
|
| 1020 |
+
>>> x_sample = dpm_solver.sample(x, steps=steps, t_start=t_start, t_end=t_end, order=3,
|
| 1021 |
+
skip_type='time_uniform', method='singlestep')
|
| 1022 |
+
- For **guided sampling with large guidance scale** by DPMs:
|
| 1023 |
+
Use multistep DPM-Solver with `predict_x0 = True` and `order = 2`.
|
| 1024 |
+
e.g.
|
| 1025 |
+
>>> dpm_solver = DPM_Solver(model_fn, noise_schedule, predict_x0=True)
|
| 1026 |
+
>>> x_sample = dpm_solver.sample(x, steps=steps, t_start=t_start, t_end=t_end, order=2,
|
| 1027 |
+
skip_type='time_uniform', method='multistep')
|
| 1028 |
+
|
| 1029 |
+
We support three types of `skip_type`:
|
| 1030 |
+
- 'logSNR': uniform logSNR for the time steps. **Recommended for low-resolutional images**
|
| 1031 |
+
- 'time_uniform': uniform time for the time steps. **Recommended for high-resolutional images**.
|
| 1032 |
+
- 'time_quadratic': quadratic time for the time steps.
|
| 1033 |
+
|
| 1034 |
+
=====================================================
|
| 1035 |
+
Args:
|
| 1036 |
+
x: A pytorch tensor. The initial value at time `t_start`
|
| 1037 |
+
e.g. if `t_start` == T, then `x` is a sample from the standard normal distribution.
|
| 1038 |
+
steps: A `int`. The total number of function evaluations (NFE).
|
| 1039 |
+
t_start: A `float`. The starting time of the sampling.
|
| 1040 |
+
If `T` is None, we use self.noise_schedule.T (default is 1.0).
|
| 1041 |
+
t_end: A `float`. The ending time of the sampling.
|
| 1042 |
+
If `t_end` is None, we use 1. / self.noise_schedule.total_N.
|
| 1043 |
+
e.g. if total_N == 1000, we have `t_end` == 1e-3.
|
| 1044 |
+
For discrete-time DPMs:
|
| 1045 |
+
- We recommend `t_end` == 1. / self.noise_schedule.total_N.
|
| 1046 |
+
For continuous-time DPMs:
|
| 1047 |
+
- We recommend `t_end` == 1e-3 when `steps` <= 15; and `t_end` == 1e-4 when `steps` > 15.
|
| 1048 |
+
order: A `int`. The order of DPM-Solver.
|
| 1049 |
+
skip_type: A `str`. The type for the spacing of the time steps. 'time_uniform' or 'logSNR' or 'time_quadratic'.
|
| 1050 |
+
method: A `str`. The method for sampling. 'singlestep' or 'multistep' or 'singlestep_fixed' or 'adaptive'.
|
| 1051 |
+
denoise_to_zero: A `bool`. Whether to denoise to time 0 at the final step.
|
| 1052 |
+
Default is `False`. If `denoise_to_zero` is `True`, the total NFE is (`steps` + 1).
|
| 1053 |
+
|
| 1054 |
+
This trick is firstly proposed by DDPM (https://arxiv.org/abs/2006.11239) and
|
| 1055 |
+
score_sde (https://arxiv.org/abs/2011.13456). Such trick can improve the FID
|
| 1056 |
+
for diffusion models sampling by diffusion SDEs for low-resolutional images
|
| 1057 |
+
(such as CIFAR-10). However, we observed that such trick does not matter for
|
| 1058 |
+
high-resolutional images. As it needs an additional NFE, we do not recommend
|
| 1059 |
+
it for high-resolutional images.
|
| 1060 |
+
lower_order_final: A `bool`. Whether to use lower order solvers at the final steps.
|
| 1061 |
+
Only valid for `method=multistep` and `steps < 15`. We empirically find that
|
| 1062 |
+
this trick is a key to stabilizing the sampling by DPM-Solver with very few steps
|
| 1063 |
+
(especially for steps <= 10). So we recommend to set it to be `True`.
|
| 1064 |
+
solver_type: A `str`. The taylor expansion type for the solver. `dpm_solver` or `taylor`. We recommend `dpm_solver`.
|
| 1065 |
+
atol: A `float`. The absolute tolerance of the adaptive step size solver. Valid when `method` == 'adaptive'.
|
| 1066 |
+
rtol: A `float`. The relative tolerance of the adaptive step size solver. Valid when `method` == 'adaptive'.
|
| 1067 |
+
Returns:
|
| 1068 |
+
x_end: A pytorch tensor. The approximated solution at time `t_end`.
|
| 1069 |
+
|
| 1070 |
+
"""
|
| 1071 |
+
t_0 = 1. / self.noise_schedule.total_N if t_end is None else t_end
|
| 1072 |
+
t_T = self.noise_schedule.T if t_start is None else t_start
|
| 1073 |
+
device = x.device
|
| 1074 |
+
if method == 'adaptive':
|
| 1075 |
+
with torch.no_grad():
|
| 1076 |
+
x = self.dpm_solver_adaptive(x, order=order, t_T=t_T, t_0=t_0, atol=atol, rtol=rtol, solver_type=solver_type)
|
| 1077 |
+
elif method == 'multistep':
|
| 1078 |
+
assert steps >= order
|
| 1079 |
+
timesteps = self.get_time_steps(skip_type=skip_type, t_T=t_T, t_0=t_0, N=steps, device=device)
|
| 1080 |
+
assert timesteps.shape[0] - 1 == steps
|
| 1081 |
+
with torch.no_grad():
|
| 1082 |
+
vec_t = timesteps[0].expand((x.shape[0]))
|
| 1083 |
+
model_prev_list = [self.model_fn(x, vec_t)]
|
| 1084 |
+
t_prev_list = [vec_t]
|
| 1085 |
+
# Init the first `order` values by lower order multistep DPM-Solver.
|
| 1086 |
+
for init_order in range(1, order):
|
| 1087 |
+
vec_t = timesteps[init_order].expand(x.shape[0])
|
| 1088 |
+
x = self.multistep_dpm_solver_update(x, model_prev_list, t_prev_list, vec_t, init_order, solver_type=solver_type)
|
| 1089 |
+
model_prev_list.append(self.model_fn(x, vec_t))
|
| 1090 |
+
t_prev_list.append(vec_t)
|
| 1091 |
+
# Compute the remaining values by `order`-th order multistep DPM-Solver.
|
| 1092 |
+
for step in range(order, steps + 1):
|
| 1093 |
+
vec_t = timesteps[step].expand(x.shape[0])
|
| 1094 |
+
if lower_order_final and steps < 15:
|
| 1095 |
+
step_order = min(order, steps + 1 - step)
|
| 1096 |
+
else:
|
| 1097 |
+
step_order = order
|
| 1098 |
+
x = self.multistep_dpm_solver_update(x, model_prev_list, t_prev_list, vec_t, step_order, solver_type=solver_type)
|
| 1099 |
+
for i in range(order - 1):
|
| 1100 |
+
t_prev_list[i] = t_prev_list[i + 1]
|
| 1101 |
+
model_prev_list[i] = model_prev_list[i + 1]
|
| 1102 |
+
t_prev_list[-1] = vec_t
|
| 1103 |
+
# We do not need to evaluate the final model value.
|
| 1104 |
+
if step < steps:
|
| 1105 |
+
model_prev_list[-1] = self.model_fn(x, vec_t)
|
| 1106 |
+
elif method in ['singlestep', 'singlestep_fixed']:
|
| 1107 |
+
if method == 'singlestep':
|
| 1108 |
+
timesteps_outer, orders = self.get_orders_and_timesteps_for_singlestep_solver(steps=steps, order=order, skip_type=skip_type, t_T=t_T, t_0=t_0, device=device)
|
| 1109 |
+
elif method == 'singlestep_fixed':
|
| 1110 |
+
K = steps // order
|
| 1111 |
+
orders = [order,] * K
|
| 1112 |
+
timesteps_outer = self.get_time_steps(skip_type=skip_type, t_T=t_T, t_0=t_0, N=K, device=device)
|
| 1113 |
+
for i, order in enumerate(orders):
|
| 1114 |
+
t_T_inner, t_0_inner = timesteps_outer[i], timesteps_outer[i + 1]
|
| 1115 |
+
timesteps_inner = self.get_time_steps(skip_type=skip_type, t_T=t_T_inner.item(), t_0=t_0_inner.item(), N=order, device=device)
|
| 1116 |
+
lambda_inner = self.noise_schedule.marginal_lambda(timesteps_inner)
|
| 1117 |
+
vec_s, vec_t = t_T_inner.tile(x.shape[0]), t_0_inner.tile(x.shape[0])
|
| 1118 |
+
h = lambda_inner[-1] - lambda_inner[0]
|
| 1119 |
+
r1 = None if order <= 1 else (lambda_inner[1] - lambda_inner[0]) / h
|
| 1120 |
+
r2 = None if order <= 2 else (lambda_inner[2] - lambda_inner[0]) / h
|
| 1121 |
+
x = self.singlestep_dpm_solver_update(x, vec_s, vec_t, order, solver_type=solver_type, r1=r1, r2=r2)
|
| 1122 |
+
if denoise_to_zero:
|
| 1123 |
+
x = self.denoise_to_zero_fn(x, torch.ones((x.shape[0],)).to(device) * t_0)
|
| 1124 |
+
return x
|
| 1125 |
+
|
| 1126 |
+
|
| 1127 |
+
|
| 1128 |
+
#############################################################
|
| 1129 |
+
# other utility functions
|
| 1130 |
+
#############################################################
|
| 1131 |
+
|
| 1132 |
+
def interpolate_fn(x, xp, yp):
|
| 1133 |
+
"""
|
| 1134 |
+
A piecewise linear function y = f(x), using xp and yp as keypoints.
|
| 1135 |
+
We implement f(x) in a differentiable way (i.e. applicable for autograd).
|
| 1136 |
+
The function f(x) is well-defined for all x-axis. (For x beyond the bounds of xp, we use the outmost points of xp to define the linear function.)
|
| 1137 |
+
|
| 1138 |
+
Args:
|
| 1139 |
+
x: PyTorch tensor with shape [N, C], where N is the batch size, C is the number of channels (we use C = 1 for DPM-Solver).
|
| 1140 |
+
xp: PyTorch tensor with shape [C, K], where K is the number of keypoints.
|
| 1141 |
+
yp: PyTorch tensor with shape [C, K].
|
| 1142 |
+
Returns:
|
| 1143 |
+
The function values f(x), with shape [N, C].
|
| 1144 |
+
"""
|
| 1145 |
+
N, K = x.shape[0], xp.shape[1]
|
| 1146 |
+
all_x = torch.cat([x.unsqueeze(2), xp.unsqueeze(0).repeat((N, 1, 1))], dim=2)
|
| 1147 |
+
sorted_all_x, x_indices = torch.sort(all_x, dim=2)
|
| 1148 |
+
x_idx = torch.argmin(x_indices, dim=2)
|
| 1149 |
+
cand_start_idx = x_idx - 1
|
| 1150 |
+
start_idx = torch.where(
|
| 1151 |
+
torch.eq(x_idx, 0),
|
| 1152 |
+
torch.tensor(1, device=x.device),
|
| 1153 |
+
torch.where(
|
| 1154 |
+
torch.eq(x_idx, K), torch.tensor(K - 2, device=x.device), cand_start_idx,
|
| 1155 |
+
),
|
| 1156 |
+
)
|
| 1157 |
+
end_idx = torch.where(torch.eq(start_idx, cand_start_idx), start_idx + 2, start_idx + 1)
|
| 1158 |
+
start_x = torch.gather(sorted_all_x, dim=2, index=start_idx.unsqueeze(2)).squeeze(2)
|
| 1159 |
+
end_x = torch.gather(sorted_all_x, dim=2, index=end_idx.unsqueeze(2)).squeeze(2)
|
| 1160 |
+
start_idx2 = torch.where(
|
| 1161 |
+
torch.eq(x_idx, 0),
|
| 1162 |
+
torch.tensor(0, device=x.device),
|
| 1163 |
+
torch.where(
|
| 1164 |
+
torch.eq(x_idx, K), torch.tensor(K - 2, device=x.device), cand_start_idx,
|
| 1165 |
+
),
|
| 1166 |
+
)
|
| 1167 |
+
y_positions_expanded = yp.unsqueeze(0).expand(N, -1, -1)
|
| 1168 |
+
start_y = torch.gather(y_positions_expanded, dim=2, index=start_idx2.unsqueeze(2)).squeeze(2)
|
| 1169 |
+
end_y = torch.gather(y_positions_expanded, dim=2, index=(start_idx2 + 1).unsqueeze(2)).squeeze(2)
|
| 1170 |
+
cand = start_y + (x - start_x) * (end_y - start_y) / (end_x - start_x)
|
| 1171 |
+
return cand
|
| 1172 |
+
|
| 1173 |
+
|
| 1174 |
+
def expand_dims(v, dims):
|
| 1175 |
+
"""
|
| 1176 |
+
Expand the tensor `v` to the dim `dims`.
|
| 1177 |
+
|
| 1178 |
+
Args:
|
| 1179 |
+
`v`: a PyTorch tensor with shape [N].
|
| 1180 |
+
`dim`: a `int`.
|
| 1181 |
+
Returns:
|
| 1182 |
+
a PyTorch tensor with shape [N, 1, 1, ..., 1] and the total dimension is `dims`.
|
| 1183 |
+
"""
|
| 1184 |
+
return v[(...,) + (None,)*(dims - 1)]
|
ldm/models/diffusion/dpm_solver/sampler.py
ADDED
|
@@ -0,0 +1,82 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
"""SAMPLING ONLY."""
|
| 2 |
+
|
| 3 |
+
import torch
|
| 4 |
+
|
| 5 |
+
from .dpm_solver import NoiseScheduleVP, model_wrapper, DPM_Solver
|
| 6 |
+
|
| 7 |
+
|
| 8 |
+
class DPMSolverSampler(object):
|
| 9 |
+
def __init__(self, model, **kwargs):
|
| 10 |
+
super().__init__()
|
| 11 |
+
self.model = model
|
| 12 |
+
to_torch = lambda x: x.clone().detach().to(torch.float32).to(model.device)
|
| 13 |
+
self.register_buffer('alphas_cumprod', to_torch(model.alphas_cumprod))
|
| 14 |
+
|
| 15 |
+
def register_buffer(self, name, attr):
|
| 16 |
+
if type(attr) == torch.Tensor:
|
| 17 |
+
if attr.device != torch.device("cuda"):
|
| 18 |
+
attr = attr.to(torch.device("cuda"))
|
| 19 |
+
setattr(self, name, attr)
|
| 20 |
+
|
| 21 |
+
@torch.no_grad()
|
| 22 |
+
def sample(self,
|
| 23 |
+
S,
|
| 24 |
+
batch_size,
|
| 25 |
+
shape,
|
| 26 |
+
conditioning=None,
|
| 27 |
+
callback=None,
|
| 28 |
+
normals_sequence=None,
|
| 29 |
+
img_callback=None,
|
| 30 |
+
quantize_x0=False,
|
| 31 |
+
eta=0.,
|
| 32 |
+
mask=None,
|
| 33 |
+
x0=None,
|
| 34 |
+
temperature=1.,
|
| 35 |
+
noise_dropout=0.,
|
| 36 |
+
score_corrector=None,
|
| 37 |
+
corrector_kwargs=None,
|
| 38 |
+
verbose=True,
|
| 39 |
+
x_T=None,
|
| 40 |
+
log_every_t=100,
|
| 41 |
+
unconditional_guidance_scale=1.,
|
| 42 |
+
unconditional_conditioning=None,
|
| 43 |
+
# this has to come in the same format as the conditioning, # e.g. as encoded tokens, ...
|
| 44 |
+
**kwargs
|
| 45 |
+
):
|
| 46 |
+
if conditioning is not None:
|
| 47 |
+
if isinstance(conditioning, dict):
|
| 48 |
+
cbs = conditioning[list(conditioning.keys())[0]].shape[0]
|
| 49 |
+
if cbs != batch_size:
|
| 50 |
+
print(f"Warning: Got {cbs} conditionings but batch-size is {batch_size}")
|
| 51 |
+
else:
|
| 52 |
+
if conditioning.shape[0] != batch_size:
|
| 53 |
+
print(f"Warning: Got {conditioning.shape[0]} conditionings but batch-size is {batch_size}")
|
| 54 |
+
|
| 55 |
+
# sampling
|
| 56 |
+
C, H, W = shape
|
| 57 |
+
size = (batch_size, C, H, W)
|
| 58 |
+
|
| 59 |
+
# print(f'Data shape for DPM-Solver sampling is {size}, sampling steps {S}')
|
| 60 |
+
|
| 61 |
+
device = self.model.betas.device
|
| 62 |
+
if x_T is None:
|
| 63 |
+
img = torch.randn(size, device=device)
|
| 64 |
+
else:
|
| 65 |
+
img = x_T
|
| 66 |
+
|
| 67 |
+
ns = NoiseScheduleVP('discrete', alphas_cumprod=self.alphas_cumprod)
|
| 68 |
+
|
| 69 |
+
model_fn = model_wrapper(
|
| 70 |
+
lambda x, t, c: self.model.apply_model(x, t, c),
|
| 71 |
+
ns,
|
| 72 |
+
model_type="noise",
|
| 73 |
+
guidance_type="classifier-free",
|
| 74 |
+
condition=conditioning,
|
| 75 |
+
unconditional_condition=unconditional_conditioning,
|
| 76 |
+
guidance_scale=unconditional_guidance_scale,
|
| 77 |
+
)
|
| 78 |
+
|
| 79 |
+
dpm_solver = DPM_Solver(model_fn, ns, predict_x0=True, thresholding=False)
|
| 80 |
+
x = dpm_solver.sample(img, steps=S, skip_type="time_uniform", method="multistep", order=2, lower_order_final=True)
|
| 81 |
+
|
| 82 |
+
return x.to(device), None
|
ldm/models/diffusion/plms.py
ADDED
|
@@ -0,0 +1,254 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
"""SAMPLING ONLY."""
|
| 2 |
+
|
| 3 |
+
import torch
|
| 4 |
+
import numpy as np
|
| 5 |
+
from tqdm import tqdm
|
| 6 |
+
from functools import partial
|
| 7 |
+
import copy
|
| 8 |
+
from ldm.modules.diffusionmodules.util import make_ddim_sampling_parameters, make_ddim_timesteps, noise_like
|
| 9 |
+
|
| 10 |
+
class PLMSSampler(object):
|
| 11 |
+
def __init__(self, model, schedule="linear", **kwargs):
|
| 12 |
+
super().__init__()
|
| 13 |
+
self.model = model
|
| 14 |
+
self.ddpm_num_timesteps = model.num_timesteps
|
| 15 |
+
self.schedule = schedule
|
| 16 |
+
|
| 17 |
+
def register_buffer(self, name, attr):
|
| 18 |
+
if type(attr) == torch.Tensor:
|
| 19 |
+
if attr.device != torch.device("cuda"):
|
| 20 |
+
attr = attr.to(torch.device("cuda"))
|
| 21 |
+
setattr(self, name, attr)
|
| 22 |
+
|
| 23 |
+
def make_schedule(self, ddim_num_steps, ddim_discretize="uniform", ddim_eta=0., verbose=True):
|
| 24 |
+
if ddim_eta != 0:
|
| 25 |
+
raise ValueError('ddim_eta must be 0 for PLMS')
|
| 26 |
+
self.ddim_timesteps = make_ddim_timesteps(ddim_discr_method=ddim_discretize, num_ddim_timesteps=ddim_num_steps,
|
| 27 |
+
num_ddpm_timesteps=self.ddpm_num_timesteps,verbose=verbose)
|
| 28 |
+
alphas_cumprod = self.model.alphas_cumprod
|
| 29 |
+
assert alphas_cumprod.shape[0] == self.ddpm_num_timesteps, 'alphas have to be defined for each timestep'
|
| 30 |
+
to_torch = lambda x: x.clone().detach().to(torch.float32).to(self.model.device)
|
| 31 |
+
|
| 32 |
+
self.register_buffer('betas', to_torch(self.model.betas))
|
| 33 |
+
self.register_buffer('alphas_cumprod', to_torch(alphas_cumprod))
|
| 34 |
+
self.register_buffer('alphas_cumprod_prev', to_torch(self.model.alphas_cumprod_prev))
|
| 35 |
+
|
| 36 |
+
# calculations for diffusion q(x_t | x_{t-1}) and others
|
| 37 |
+
self.register_buffer('sqrt_alphas_cumprod', to_torch(np.sqrt(alphas_cumprod.cpu())))
|
| 38 |
+
self.register_buffer('sqrt_one_minus_alphas_cumprod', to_torch(np.sqrt(1. - alphas_cumprod.cpu())))
|
| 39 |
+
self.register_buffer('log_one_minus_alphas_cumprod', to_torch(np.log(1. - alphas_cumprod.cpu())))
|
| 40 |
+
self.register_buffer('sqrt_recip_alphas_cumprod', to_torch(np.sqrt(1. / alphas_cumprod.cpu())))
|
| 41 |
+
self.register_buffer('sqrt_recipm1_alphas_cumprod', to_torch(np.sqrt(1. / alphas_cumprod.cpu() - 1)))
|
| 42 |
+
|
| 43 |
+
# ddim sampling parameters
|
| 44 |
+
ddim_sigmas, ddim_alphas, ddim_alphas_prev = make_ddim_sampling_parameters(alphacums=alphas_cumprod.cpu(),
|
| 45 |
+
ddim_timesteps=self.ddim_timesteps,
|
| 46 |
+
eta=ddim_eta,verbose=verbose)
|
| 47 |
+
self.register_buffer('ddim_sigmas', ddim_sigmas)
|
| 48 |
+
self.register_buffer('ddim_alphas', ddim_alphas)
|
| 49 |
+
self.register_buffer('ddim_alphas_prev', ddim_alphas_prev)
|
| 50 |
+
self.register_buffer('ddim_sqrt_one_minus_alphas', np.sqrt(1. - ddim_alphas))
|
| 51 |
+
sigmas_for_original_sampling_steps = ddim_eta * torch.sqrt(
|
| 52 |
+
(1 - self.alphas_cumprod_prev) / (1 - self.alphas_cumprod) * (
|
| 53 |
+
1 - self.alphas_cumprod / self.alphas_cumprod_prev))
|
| 54 |
+
self.register_buffer('ddim_sigmas_for_original_num_steps', sigmas_for_original_sampling_steps)
|
| 55 |
+
|
| 56 |
+
@torch.no_grad()
|
| 57 |
+
def sample(self,
|
| 58 |
+
S,
|
| 59 |
+
batch_size,
|
| 60 |
+
shape,
|
| 61 |
+
conditioning=None,
|
| 62 |
+
callback=None,
|
| 63 |
+
normals_sequence=None,
|
| 64 |
+
img_callback=None,
|
| 65 |
+
quantize_x0=False,
|
| 66 |
+
eta=0.,
|
| 67 |
+
mask=None,
|
| 68 |
+
x0=None,
|
| 69 |
+
temperature=1.,
|
| 70 |
+
noise_dropout=0.,
|
| 71 |
+
score_corrector=None,
|
| 72 |
+
corrector_kwargs=None,
|
| 73 |
+
verbose=True,
|
| 74 |
+
x_T=None,
|
| 75 |
+
log_every_t=100,
|
| 76 |
+
unconditional_guidance_scale=1.,
|
| 77 |
+
unconditional_conditioning=None,
|
| 78 |
+
features_adapter1=None,
|
| 79 |
+
features_adapter2=None,
|
| 80 |
+
mode = 'sketch',
|
| 81 |
+
con_strength=30,
|
| 82 |
+
# this has to come in the same format as the conditioning, # e.g. as encoded tokens, ...
|
| 83 |
+
**kwargs
|
| 84 |
+
):
|
| 85 |
+
# print('*'*20,x_T)
|
| 86 |
+
# exit(0)
|
| 87 |
+
if conditioning is not None:
|
| 88 |
+
if isinstance(conditioning, dict):
|
| 89 |
+
cbs = conditioning[list(conditioning.keys())[0]].shape[0]
|
| 90 |
+
if cbs != batch_size:
|
| 91 |
+
print(f"Warning: Got {cbs} conditionings but batch-size is {batch_size}")
|
| 92 |
+
else:
|
| 93 |
+
if conditioning.shape[0] != batch_size:
|
| 94 |
+
print(f"Warning: Got {conditioning.shape[0]} conditionings but batch-size is {batch_size}")
|
| 95 |
+
|
| 96 |
+
self.make_schedule(ddim_num_steps=S, ddim_eta=eta, verbose=verbose)
|
| 97 |
+
C, H, W = shape
|
| 98 |
+
size = (batch_size, C, H, W)
|
| 99 |
+
print(f'Data shape for PLMS sampling is {size}')
|
| 100 |
+
|
| 101 |
+
samples, intermediates = self.plms_sampling(conditioning, size,
|
| 102 |
+
callback=callback,
|
| 103 |
+
img_callback=img_callback,
|
| 104 |
+
quantize_denoised=quantize_x0,
|
| 105 |
+
mask=mask, x0=x0,
|
| 106 |
+
ddim_use_original_steps=False,
|
| 107 |
+
noise_dropout=noise_dropout,
|
| 108 |
+
temperature=temperature,
|
| 109 |
+
score_corrector=score_corrector,
|
| 110 |
+
corrector_kwargs=corrector_kwargs,
|
| 111 |
+
x_T=x_T,
|
| 112 |
+
log_every_t=log_every_t,
|
| 113 |
+
unconditional_guidance_scale=unconditional_guidance_scale,
|
| 114 |
+
unconditional_conditioning=unconditional_conditioning,
|
| 115 |
+
features_adapter1=copy.deepcopy(features_adapter1),
|
| 116 |
+
features_adapter2=copy.deepcopy(features_adapter2),
|
| 117 |
+
mode = mode,
|
| 118 |
+
con_strength = con_strength
|
| 119 |
+
)
|
| 120 |
+
return samples, intermediates
|
| 121 |
+
|
| 122 |
+
@torch.no_grad()
|
| 123 |
+
def plms_sampling(self, cond, shape,
|
| 124 |
+
x_T=None, ddim_use_original_steps=False,
|
| 125 |
+
callback=None, timesteps=None, quantize_denoised=False,
|
| 126 |
+
mask=None, x0=None, img_callback=None, log_every_t=100,
|
| 127 |
+
temperature=1., noise_dropout=0., score_corrector=None, corrector_kwargs=None,
|
| 128 |
+
unconditional_guidance_scale=1., unconditional_conditioning=None,features_adapter1=None, features_adapter2=None, mode='sketch', con_strength=30):
|
| 129 |
+
device = self.model.betas.device
|
| 130 |
+
b = shape[0]
|
| 131 |
+
if x_T is None:
|
| 132 |
+
img = torch.randn(shape, device=device)
|
| 133 |
+
else:
|
| 134 |
+
img = x_T
|
| 135 |
+
if timesteps is None:
|
| 136 |
+
timesteps = self.ddpm_num_timesteps if ddim_use_original_steps else self.ddim_timesteps
|
| 137 |
+
elif timesteps is not None and not ddim_use_original_steps:
|
| 138 |
+
subset_end = int(min(timesteps / self.ddim_timesteps.shape[0], 1) * self.ddim_timesteps.shape[0]) - 1
|
| 139 |
+
timesteps = self.ddim_timesteps[:subset_end]
|
| 140 |
+
|
| 141 |
+
intermediates = {'x_inter': [img], 'pred_x0': [img]}
|
| 142 |
+
time_range = list(reversed(range(0,timesteps))) if ddim_use_original_steps else np.flip(timesteps)
|
| 143 |
+
total_steps = timesteps if ddim_use_original_steps else timesteps.shape[0]
|
| 144 |
+
print(f"Running PLMS Sampling with {total_steps} timesteps")
|
| 145 |
+
|
| 146 |
+
iterator = tqdm(time_range, desc='PLMS Sampler', total=total_steps)
|
| 147 |
+
old_eps = []
|
| 148 |
+
|
| 149 |
+
for i, step in enumerate(iterator):
|
| 150 |
+
index = total_steps - i - 1
|
| 151 |
+
ts = torch.full((b,), step, device=device, dtype=torch.long)
|
| 152 |
+
ts_next = torch.full((b,), time_range[min(i + 1, len(time_range) - 1)], device=device, dtype=torch.long)
|
| 153 |
+
|
| 154 |
+
if mask is not None :#and index>=10:
|
| 155 |
+
assert x0 is not None
|
| 156 |
+
img_orig = self.model.q_sample(x0, ts) # TODO: deterministic forward pass?
|
| 157 |
+
img = img_orig * mask + (1. - mask) * img
|
| 158 |
+
|
| 159 |
+
if mode == 'sketch':
|
| 160 |
+
if index<con_strength:
|
| 161 |
+
features_adapter = None
|
| 162 |
+
else:
|
| 163 |
+
features_adapter = features_adapter1
|
| 164 |
+
elif mode == 'mul':
|
| 165 |
+
features_adapter = [a1i*0.5 + a2i for a1i, a2i in zip(features_adapter1, features_adapter2)]
|
| 166 |
+
else:
|
| 167 |
+
features_adapter = features_adapter1
|
| 168 |
+
|
| 169 |
+
outs = self.p_sample_plms(img, cond, ts, index=index, use_original_steps=ddim_use_original_steps,
|
| 170 |
+
quantize_denoised=quantize_denoised, temperature=temperature,
|
| 171 |
+
noise_dropout=noise_dropout, score_corrector=score_corrector,
|
| 172 |
+
corrector_kwargs=corrector_kwargs,
|
| 173 |
+
unconditional_guidance_scale=unconditional_guidance_scale,
|
| 174 |
+
unconditional_conditioning=unconditional_conditioning,
|
| 175 |
+
old_eps=old_eps, t_next=ts_next, features_adapter=copy.deepcopy(features_adapter))
|
| 176 |
+
|
| 177 |
+
img, pred_x0, e_t = outs
|
| 178 |
+
old_eps.append(e_t)
|
| 179 |
+
if len(old_eps) >= 4:
|
| 180 |
+
old_eps.pop(0)
|
| 181 |
+
if callback: callback(i)
|
| 182 |
+
if img_callback: img_callback(pred_x0, i)
|
| 183 |
+
|
| 184 |
+
if index % log_every_t == 0 or index == total_steps - 1:
|
| 185 |
+
intermediates['x_inter'].append(img)
|
| 186 |
+
intermediates['pred_x0'].append(pred_x0)
|
| 187 |
+
|
| 188 |
+
return img, intermediates
|
| 189 |
+
|
| 190 |
+
@torch.no_grad()
|
| 191 |
+
def p_sample_plms(self, x, c, t, index, repeat_noise=False, use_original_steps=False, quantize_denoised=False,
|
| 192 |
+
temperature=1., noise_dropout=0., score_corrector=None, corrector_kwargs=None,
|
| 193 |
+
unconditional_guidance_scale=1., unconditional_conditioning=None, old_eps=None, t_next=None, features_adapter=None):
|
| 194 |
+
b, *_, device = *x.shape, x.device
|
| 195 |
+
|
| 196 |
+
def get_model_output(x, t):
|
| 197 |
+
if unconditional_conditioning is None or unconditional_guidance_scale == 1.:
|
| 198 |
+
e_t = self.model.apply_model(x, t, c, copy.deepcopy(features_adapter))
|
| 199 |
+
else:
|
| 200 |
+
x_in = torch.cat([x] * 2)
|
| 201 |
+
t_in = torch.cat([t] * 2)
|
| 202 |
+
c_in = torch.cat([unconditional_conditioning, c])
|
| 203 |
+
e_t_uncond, e_t = self.model.apply_model(x_in, t_in, c_in, copy.deepcopy(features_adapter)).chunk(2)
|
| 204 |
+
e_t = e_t_uncond + unconditional_guidance_scale * (e_t - e_t_uncond)
|
| 205 |
+
|
| 206 |
+
if score_corrector is not None:
|
| 207 |
+
assert self.model.parameterization == "eps"
|
| 208 |
+
e_t = score_corrector.modify_score(self.model, e_t, x, t, c, **corrector_kwargs)
|
| 209 |
+
|
| 210 |
+
return e_t
|
| 211 |
+
|
| 212 |
+
alphas = self.model.alphas_cumprod if use_original_steps else self.ddim_alphas
|
| 213 |
+
alphas_prev = self.model.alphas_cumprod_prev if use_original_steps else self.ddim_alphas_prev
|
| 214 |
+
sqrt_one_minus_alphas = self.model.sqrt_one_minus_alphas_cumprod if use_original_steps else self.ddim_sqrt_one_minus_alphas
|
| 215 |
+
sigmas = self.model.ddim_sigmas_for_original_num_steps if use_original_steps else self.ddim_sigmas
|
| 216 |
+
|
| 217 |
+
def get_x_prev_and_pred_x0(e_t, index):
|
| 218 |
+
# select parameters corresponding to the currently considered timestep
|
| 219 |
+
a_t = torch.full((b, 1, 1, 1), alphas[index], device=device)
|
| 220 |
+
a_prev = torch.full((b, 1, 1, 1), alphas_prev[index], device=device)
|
| 221 |
+
sigma_t = torch.full((b, 1, 1, 1), sigmas[index], device=device)
|
| 222 |
+
sqrt_one_minus_at = torch.full((b, 1, 1, 1), sqrt_one_minus_alphas[index],device=device)
|
| 223 |
+
|
| 224 |
+
# current prediction for x_0
|
| 225 |
+
pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()
|
| 226 |
+
if quantize_denoised:
|
| 227 |
+
pred_x0, _, *_ = self.model.first_stage_model.quantize(pred_x0)
|
| 228 |
+
# direction pointing to x_t
|
| 229 |
+
dir_xt = (1. - a_prev - sigma_t**2).sqrt() * e_t
|
| 230 |
+
noise = sigma_t * noise_like(x.shape, device, repeat_noise) * temperature
|
| 231 |
+
if noise_dropout > 0.:
|
| 232 |
+
noise = torch.nn.functional.dropout(noise, p=noise_dropout)
|
| 233 |
+
x_prev = a_prev.sqrt() * pred_x0 + dir_xt + noise
|
| 234 |
+
return x_prev, pred_x0
|
| 235 |
+
|
| 236 |
+
e_t = get_model_output(x, t)
|
| 237 |
+
if len(old_eps) == 0:
|
| 238 |
+
# Pseudo Improved Euler (2nd order)
|
| 239 |
+
x_prev, pred_x0 = get_x_prev_and_pred_x0(e_t, index)
|
| 240 |
+
e_t_next = get_model_output(x_prev, t_next)
|
| 241 |
+
e_t_prime = (e_t + e_t_next) / 2
|
| 242 |
+
elif len(old_eps) == 1:
|
| 243 |
+
# 2nd order Pseudo Linear Multistep (Adams-Bashforth)
|
| 244 |
+
e_t_prime = (3 * e_t - old_eps[-1]) / 2
|
| 245 |
+
elif len(old_eps) == 2:
|
| 246 |
+
# 3nd order Pseudo Linear Multistep (Adams-Bashforth)
|
| 247 |
+
e_t_prime = (23 * e_t - 16 * old_eps[-1] + 5 * old_eps[-2]) / 12
|
| 248 |
+
elif len(old_eps) >= 3:
|
| 249 |
+
# 4nd order Pseudo Linear Multistep (Adams-Bashforth)
|
| 250 |
+
e_t_prime = (55 * e_t - 59 * old_eps[-1] + 37 * old_eps[-2] - 9 * old_eps[-3]) / 24
|
| 251 |
+
|
| 252 |
+
x_prev, pred_x0 = get_x_prev_and_pred_x0(e_t_prime, index)
|
| 253 |
+
|
| 254 |
+
return x_prev, pred_x0, e_t
|
ldm/modules/attention.py
ADDED
|
@@ -0,0 +1,261 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from inspect import isfunction
|
| 2 |
+
import math
|
| 3 |
+
import torch
|
| 4 |
+
import torch.nn.functional as F
|
| 5 |
+
from torch import nn, einsum
|
| 6 |
+
from einops import rearrange, repeat
|
| 7 |
+
|
| 8 |
+
from ldm.modules.diffusionmodules.util import checkpoint
|
| 9 |
+
|
| 10 |
+
|
| 11 |
+
def exists(val):
|
| 12 |
+
return val is not None
|
| 13 |
+
|
| 14 |
+
|
| 15 |
+
def uniq(arr):
|
| 16 |
+
return{el: True for el in arr}.keys()
|
| 17 |
+
|
| 18 |
+
|
| 19 |
+
def default(val, d):
|
| 20 |
+
if exists(val):
|
| 21 |
+
return val
|
| 22 |
+
return d() if isfunction(d) else d
|
| 23 |
+
|
| 24 |
+
|
| 25 |
+
def max_neg_value(t):
|
| 26 |
+
return -torch.finfo(t.dtype).max
|
| 27 |
+
|
| 28 |
+
|
| 29 |
+
def init_(tensor):
|
| 30 |
+
dim = tensor.shape[-1]
|
| 31 |
+
std = 1 / math.sqrt(dim)
|
| 32 |
+
tensor.uniform_(-std, std)
|
| 33 |
+
return tensor
|
| 34 |
+
|
| 35 |
+
|
| 36 |
+
# feedforward
|
| 37 |
+
class GEGLU(nn.Module):
|
| 38 |
+
def __init__(self, dim_in, dim_out):
|
| 39 |
+
super().__init__()
|
| 40 |
+
self.proj = nn.Linear(dim_in, dim_out * 2)
|
| 41 |
+
|
| 42 |
+
def forward(self, x):
|
| 43 |
+
x, gate = self.proj(x).chunk(2, dim=-1)
|
| 44 |
+
return x * F.gelu(gate)
|
| 45 |
+
|
| 46 |
+
|
| 47 |
+
class FeedForward(nn.Module):
|
| 48 |
+
def __init__(self, dim, dim_out=None, mult=4, glu=False, dropout=0.):
|
| 49 |
+
super().__init__()
|
| 50 |
+
inner_dim = int(dim * mult)
|
| 51 |
+
dim_out = default(dim_out, dim)
|
| 52 |
+
project_in = nn.Sequential(
|
| 53 |
+
nn.Linear(dim, inner_dim),
|
| 54 |
+
nn.GELU()
|
| 55 |
+
) if not glu else GEGLU(dim, inner_dim)
|
| 56 |
+
|
| 57 |
+
self.net = nn.Sequential(
|
| 58 |
+
project_in,
|
| 59 |
+
nn.Dropout(dropout),
|
| 60 |
+
nn.Linear(inner_dim, dim_out)
|
| 61 |
+
)
|
| 62 |
+
|
| 63 |
+
def forward(self, x):
|
| 64 |
+
return self.net(x)
|
| 65 |
+
|
| 66 |
+
|
| 67 |
+
def zero_module(module):
|
| 68 |
+
"""
|
| 69 |
+
Zero out the parameters of a module and return it.
|
| 70 |
+
"""
|
| 71 |
+
for p in module.parameters():
|
| 72 |
+
p.detach().zero_()
|
| 73 |
+
return module
|
| 74 |
+
|
| 75 |
+
|
| 76 |
+
def Normalize(in_channels):
|
| 77 |
+
return torch.nn.GroupNorm(num_groups=32, num_channels=in_channels, eps=1e-6, affine=True)
|
| 78 |
+
|
| 79 |
+
|
| 80 |
+
class LinearAttention(nn.Module):
|
| 81 |
+
def __init__(self, dim, heads=4, dim_head=32):
|
| 82 |
+
super().__init__()
|
| 83 |
+
self.heads = heads
|
| 84 |
+
hidden_dim = dim_head * heads
|
| 85 |
+
self.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, bias = False)
|
| 86 |
+
self.to_out = nn.Conv2d(hidden_dim, dim, 1)
|
| 87 |
+
|
| 88 |
+
def forward(self, x):
|
| 89 |
+
b, c, h, w = x.shape
|
| 90 |
+
qkv = self.to_qkv(x)
|
| 91 |
+
q, k, v = rearrange(qkv, 'b (qkv heads c) h w -> qkv b heads c (h w)', heads = self.heads, qkv=3)
|
| 92 |
+
k = k.softmax(dim=-1)
|
| 93 |
+
context = torch.einsum('bhdn,bhen->bhde', k, v)
|
| 94 |
+
out = torch.einsum('bhde,bhdn->bhen', context, q)
|
| 95 |
+
out = rearrange(out, 'b heads c (h w) -> b (heads c) h w', heads=self.heads, h=h, w=w)
|
| 96 |
+
return self.to_out(out)
|
| 97 |
+
|
| 98 |
+
|
| 99 |
+
class SpatialSelfAttention(nn.Module):
|
| 100 |
+
def __init__(self, in_channels):
|
| 101 |
+
super().__init__()
|
| 102 |
+
self.in_channels = in_channels
|
| 103 |
+
|
| 104 |
+
self.norm = Normalize(in_channels)
|
| 105 |
+
self.q = torch.nn.Conv2d(in_channels,
|
| 106 |
+
in_channels,
|
| 107 |
+
kernel_size=1,
|
| 108 |
+
stride=1,
|
| 109 |
+
padding=0)
|
| 110 |
+
self.k = torch.nn.Conv2d(in_channels,
|
| 111 |
+
in_channels,
|
| 112 |
+
kernel_size=1,
|
| 113 |
+
stride=1,
|
| 114 |
+
padding=0)
|
| 115 |
+
self.v = torch.nn.Conv2d(in_channels,
|
| 116 |
+
in_channels,
|
| 117 |
+
kernel_size=1,
|
| 118 |
+
stride=1,
|
| 119 |
+
padding=0)
|
| 120 |
+
self.proj_out = torch.nn.Conv2d(in_channels,
|
| 121 |
+
in_channels,
|
| 122 |
+
kernel_size=1,
|
| 123 |
+
stride=1,
|
| 124 |
+
padding=0)
|
| 125 |
+
|
| 126 |
+
def forward(self, x):
|
| 127 |
+
h_ = x
|
| 128 |
+
h_ = self.norm(h_)
|
| 129 |
+
q = self.q(h_)
|
| 130 |
+
k = self.k(h_)
|
| 131 |
+
v = self.v(h_)
|
| 132 |
+
|
| 133 |
+
# compute attention
|
| 134 |
+
b,c,h,w = q.shape
|
| 135 |
+
q = rearrange(q, 'b c h w -> b (h w) c')
|
| 136 |
+
k = rearrange(k, 'b c h w -> b c (h w)')
|
| 137 |
+
w_ = torch.einsum('bij,bjk->bik', q, k)
|
| 138 |
+
|
| 139 |
+
w_ = w_ * (int(c)**(-0.5))
|
| 140 |
+
w_ = torch.nn.functional.softmax(w_, dim=2)
|
| 141 |
+
|
| 142 |
+
# attend to values
|
| 143 |
+
v = rearrange(v, 'b c h w -> b c (h w)')
|
| 144 |
+
w_ = rearrange(w_, 'b i j -> b j i')
|
| 145 |
+
h_ = torch.einsum('bij,bjk->bik', v, w_)
|
| 146 |
+
h_ = rearrange(h_, 'b c (h w) -> b c h w', h=h)
|
| 147 |
+
h_ = self.proj_out(h_)
|
| 148 |
+
|
| 149 |
+
return x+h_
|
| 150 |
+
|
| 151 |
+
|
| 152 |
+
class CrossAttention(nn.Module):
|
| 153 |
+
def __init__(self, query_dim, context_dim=None, heads=8, dim_head=64, dropout=0.):
|
| 154 |
+
super().__init__()
|
| 155 |
+
inner_dim = dim_head * heads
|
| 156 |
+
context_dim = default(context_dim, query_dim)
|
| 157 |
+
|
| 158 |
+
self.scale = dim_head ** -0.5
|
| 159 |
+
self.heads = heads
|
| 160 |
+
|
| 161 |
+
self.to_q = nn.Linear(query_dim, inner_dim, bias=False)
|
| 162 |
+
self.to_k = nn.Linear(context_dim, inner_dim, bias=False)
|
| 163 |
+
self.to_v = nn.Linear(context_dim, inner_dim, bias=False)
|
| 164 |
+
|
| 165 |
+
self.to_out = nn.Sequential(
|
| 166 |
+
nn.Linear(inner_dim, query_dim),
|
| 167 |
+
nn.Dropout(dropout)
|
| 168 |
+
)
|
| 169 |
+
|
| 170 |
+
def forward(self, x, context=None, mask=None):
|
| 171 |
+
h = self.heads
|
| 172 |
+
|
| 173 |
+
q = self.to_q(x)
|
| 174 |
+
context = default(context, x)
|
| 175 |
+
k = self.to_k(context)
|
| 176 |
+
v = self.to_v(context)
|
| 177 |
+
|
| 178 |
+
q, k, v = map(lambda t: rearrange(t, 'b n (h d) -> (b h) n d', h=h), (q, k, v))
|
| 179 |
+
|
| 180 |
+
sim = einsum('b i d, b j d -> b i j', q, k) * self.scale
|
| 181 |
+
|
| 182 |
+
if exists(mask):
|
| 183 |
+
mask = rearrange(mask, 'b ... -> b (...)')
|
| 184 |
+
max_neg_value = -torch.finfo(sim.dtype).max
|
| 185 |
+
mask = repeat(mask, 'b j -> (b h) () j', h=h)
|
| 186 |
+
sim.masked_fill_(~mask, max_neg_value)
|
| 187 |
+
|
| 188 |
+
# attention, what we cannot get enough of
|
| 189 |
+
attn = sim.softmax(dim=-1)
|
| 190 |
+
|
| 191 |
+
out = einsum('b i j, b j d -> b i d', attn, v)
|
| 192 |
+
out = rearrange(out, '(b h) n d -> b n (h d)', h=h)
|
| 193 |
+
return self.to_out(out)
|
| 194 |
+
|
| 195 |
+
|
| 196 |
+
class BasicTransformerBlock(nn.Module):
|
| 197 |
+
def __init__(self, dim, n_heads, d_head, dropout=0., context_dim=None, gated_ff=True, checkpoint=True):
|
| 198 |
+
super().__init__()
|
| 199 |
+
self.attn1 = CrossAttention(query_dim=dim, heads=n_heads, dim_head=d_head, dropout=dropout) # is a self-attention
|
| 200 |
+
self.ff = FeedForward(dim, dropout=dropout, glu=gated_ff)
|
| 201 |
+
self.attn2 = CrossAttention(query_dim=dim, context_dim=context_dim,
|
| 202 |
+
heads=n_heads, dim_head=d_head, dropout=dropout) # is self-attn if context is none
|
| 203 |
+
self.norm1 = nn.LayerNorm(dim)
|
| 204 |
+
self.norm2 = nn.LayerNorm(dim)
|
| 205 |
+
self.norm3 = nn.LayerNorm(dim)
|
| 206 |
+
self.checkpoint = checkpoint
|
| 207 |
+
|
| 208 |
+
def forward(self, x, context=None):
|
| 209 |
+
return checkpoint(self._forward, (x, context), self.parameters(), self.checkpoint)
|
| 210 |
+
|
| 211 |
+
def _forward(self, x, context=None):
|
| 212 |
+
x = self.attn1(self.norm1(x)) + x
|
| 213 |
+
x = self.attn2(self.norm2(x), context=context) + x
|
| 214 |
+
x = self.ff(self.norm3(x)) + x
|
| 215 |
+
return x
|
| 216 |
+
|
| 217 |
+
|
| 218 |
+
class SpatialTransformer(nn.Module):
|
| 219 |
+
"""
|
| 220 |
+
Transformer block for image-like data.
|
| 221 |
+
First, project the input (aka embedding)
|
| 222 |
+
and reshape to b, t, d.
|
| 223 |
+
Then apply standard transformer action.
|
| 224 |
+
Finally, reshape to image
|
| 225 |
+
"""
|
| 226 |
+
def __init__(self, in_channels, n_heads, d_head,
|
| 227 |
+
depth=1, dropout=0., context_dim=None):
|
| 228 |
+
super().__init__()
|
| 229 |
+
self.in_channels = in_channels
|
| 230 |
+
inner_dim = n_heads * d_head
|
| 231 |
+
self.norm = Normalize(in_channels)
|
| 232 |
+
|
| 233 |
+
self.proj_in = nn.Conv2d(in_channels,
|
| 234 |
+
inner_dim,
|
| 235 |
+
kernel_size=1,
|
| 236 |
+
stride=1,
|
| 237 |
+
padding=0)
|
| 238 |
+
|
| 239 |
+
self.transformer_blocks = nn.ModuleList(
|
| 240 |
+
[BasicTransformerBlock(inner_dim, n_heads, d_head, dropout=dropout, context_dim=context_dim)
|
| 241 |
+
for d in range(depth)]
|
| 242 |
+
)
|
| 243 |
+
|
| 244 |
+
self.proj_out = zero_module(nn.Conv2d(inner_dim,
|
| 245 |
+
in_channels,
|
| 246 |
+
kernel_size=1,
|
| 247 |
+
stride=1,
|
| 248 |
+
padding=0))
|
| 249 |
+
|
| 250 |
+
def forward(self, x, context=None):
|
| 251 |
+
# note: if no context is given, cross-attention defaults to self-attention
|
| 252 |
+
b, c, h, w = x.shape
|
| 253 |
+
x_in = x
|
| 254 |
+
x = self.norm(x)
|
| 255 |
+
x = self.proj_in(x)
|
| 256 |
+
x = rearrange(x, 'b c h w -> b (h w) c')
|
| 257 |
+
for block in self.transformer_blocks:
|
| 258 |
+
x = block(x, context=context)
|
| 259 |
+
x = rearrange(x, 'b (h w) c -> b c h w', h=h, w=w)
|
| 260 |
+
x = self.proj_out(x)
|
| 261 |
+
return x + x_in
|
ldm/modules/diffusionmodules/__init__.py
ADDED
|
File without changes
|