
init dataset
Browse files- .gitattributes +1 -1
- README.md +29 -0
- assets/dataset.png +0 -0
- rendering/render_albedo.py +212 -0
- rendering/render_color.py +279 -0
- rendering/render_normal_orm.py +228 -0
.gitattributes
CHANGED
|
@@ -48,7 +48,7 @@ saved_model/**/* filter=lfs diff=lfs merge=lfs -text
|
|
| 48 |
# Image files - uncompressed
|
| 49 |
*.bmp filter=lfs diff=lfs merge=lfs -text
|
| 50 |
*.gif filter=lfs diff=lfs merge=lfs -text
|
| 51 |
-
*.png filter=lfs diff=lfs merge=lfs -text
|
| 52 |
*.tiff filter=lfs diff=lfs merge=lfs -text
|
| 53 |
# Image files - compressed
|
| 54 |
*.jpg filter=lfs diff=lfs merge=lfs -text
|
|
|
|
| 48 |
# Image files - uncompressed
|
| 49 |
*.bmp filter=lfs diff=lfs merge=lfs -text
|
| 50 |
*.gif filter=lfs diff=lfs merge=lfs -text
|
| 51 |
+
# *.png filter=lfs diff=lfs merge=lfs -text
|
| 52 |
*.tiff filter=lfs diff=lfs merge=lfs -text
|
| 53 |
# Image files - compressed
|
| 54 |
*.jpg filter=lfs diff=lfs merge=lfs -text
|
README.md
CHANGED
|
@@ -1,3 +1,32 @@
|
|
| 1 |
---
|
| 2 |
license: mit
|
| 3 |
---
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
---
|
| 2 |
license: mit
|
| 3 |
---
|
| 4 |
+
|
| 5 |
+
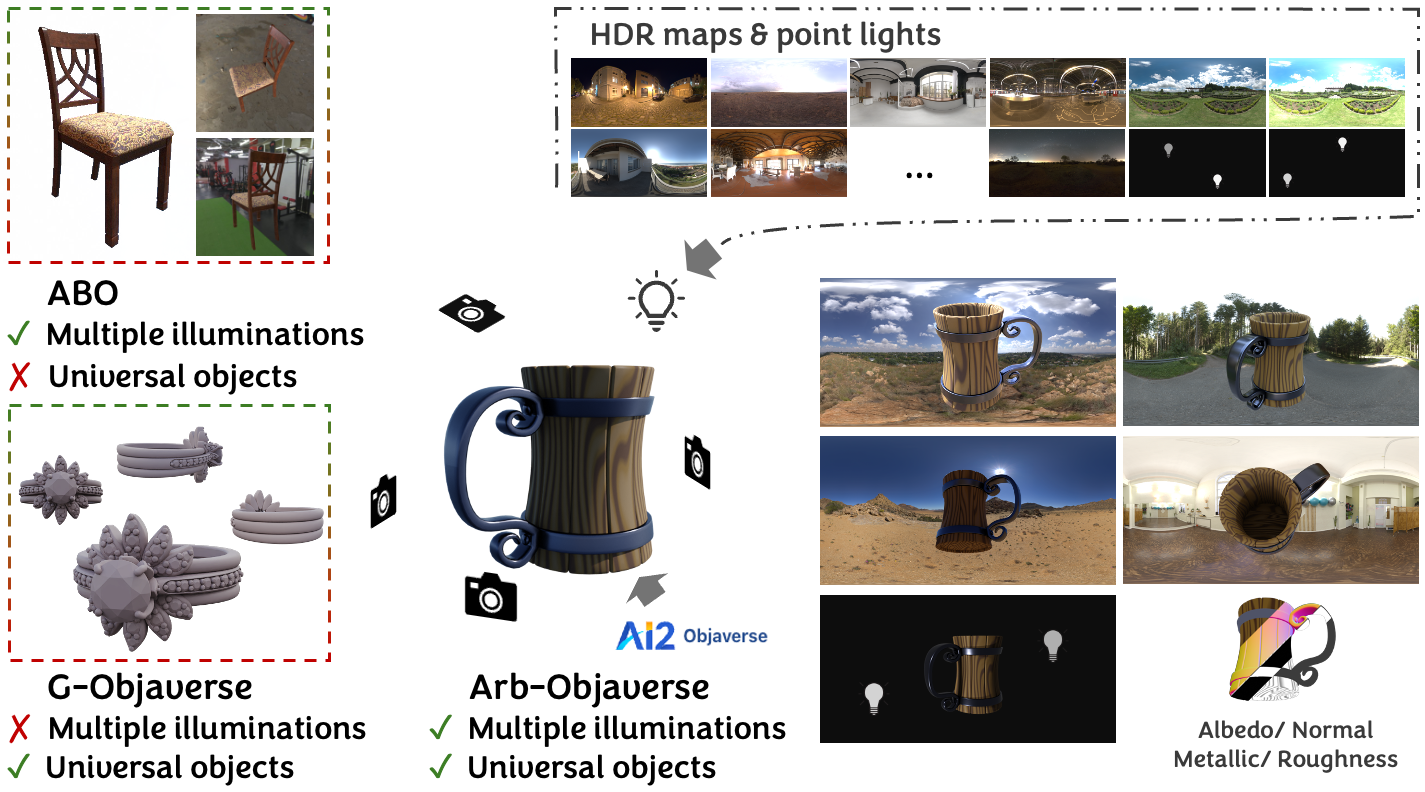
# Arb-Objaverse Dataset
|
| 6 |
+
|
| 7 |
+
[Project page](https://lizb6626.github.io/IDArb/) | [Paper](https://lizb6626.github.io/IDArb/) | [Code](https://github.com/Lizb6626/IDArb)
|
| 8 |
+
|
| 9 |
+

|
| 10 |
+
|
| 11 |
+
|
| 12 |
+
## News
|
| 13 |
+
|
| 14 |
+
- [2024-12] We are in the process of uploading the complete dataset. Stay tuned!
|
| 15 |
+
|
| 16 |
+
## Dataset Format
|
| 17 |
+
|
| 18 |
+
```
|
| 19 |
+
Arb-Objaverse Dataset
|
| 20 |
+
├── 000-000
|
| 21 |
+
│ ├── 0a3dd21606a84a449bb22f597c34bab7 // object uid
|
| 22 |
+
│ │ ├── albedo_<view_idx>.png // albedo image
|
| 23 |
+
│ │ ├── color_<light_idx>_<view_idx>.png // rendered rgb image
|
| 24 |
+
│ │ ├── normal_<view_idx>.exr
|
| 25 |
+
│ │ ├── orm_<view_idx>.png // we store material as (o, roughness, metallic), where o is left unused
|
| 26 |
+
│ │ ├── camera.json // camera poses
|
| 27 |
+
│ │ ├── lighting.json // rendering light
|
| 28 |
+
```
|
| 29 |
+
|
| 30 |
+
## Rendering Scripts
|
| 31 |
+
|
| 32 |
+
Rendering scripts for generating this dataset are available in the `./rendering` directory. We utilize `blenderproc==2.5.0` for Blender rendering. Environmental HDRs are sourced from the [Haven Dataset](https://dlr-rm.github.io/BlenderProc/examples/datasets/haven/README.html).
|
assets/dataset.png
ADDED
|
rendering/render_albedo.py
ADDED
|
@@ -0,0 +1,212 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import blenderproc as bproc
|
| 2 |
+
import numpy as np
|
| 3 |
+
import os
|
| 4 |
+
os.environ["OPENCV_IO_ENABLE_OPENEXR"]="1"
|
| 5 |
+
import json
|
| 6 |
+
import bpy
|
| 7 |
+
import cv2
|
| 8 |
+
from PIL import Image
|
| 9 |
+
import math
|
| 10 |
+
from mathutils import Vector, Matrix
|
| 11 |
+
import argparse
|
| 12 |
+
|
| 13 |
+
parser = argparse.ArgumentParser()
|
| 14 |
+
parser.add_argument('--glb_path', type=str)
|
| 15 |
+
parser.add_argument('--output_dir', type=str, default='output')
|
| 16 |
+
args = parser.parse_args()
|
| 17 |
+
|
| 18 |
+
# load the glb model
|
| 19 |
+
def load_object(object_path: str) -> None:
|
| 20 |
+
"""Loads a glb model into the scene."""
|
| 21 |
+
if object_path.endswith(".glb") or object_path.endswith(".gltf"):
|
| 22 |
+
bpy.ops.import_scene.gltf(filepath=object_path, merge_vertices=False)
|
| 23 |
+
elif object_path.endswith(".fbx"):
|
| 24 |
+
bpy.ops.import_scene.fbx(filepath=object_path)
|
| 25 |
+
elif object_path.endswith(".obj"):
|
| 26 |
+
bpy.ops.import_scene.obj(filepath=object_path)
|
| 27 |
+
elif object_path.endswith(".ply"):
|
| 28 |
+
bpy.ops.import_mesh.ply(filepath=object_path)
|
| 29 |
+
else:
|
| 30 |
+
raise ValueError(f"Unsupported file type: {object_path}")
|
| 31 |
+
|
| 32 |
+
|
| 33 |
+
def load_envmap(envmap_path: str) -> None:
|
| 34 |
+
"""Loads an environment map into the scene."""
|
| 35 |
+
world = bpy.context.scene.world
|
| 36 |
+
world.use_nodes = True
|
| 37 |
+
bg = world.node_tree.nodes['Background']
|
| 38 |
+
envmap = world.node_tree.nodes.new('ShaderNodeTexEnvironment')
|
| 39 |
+
envmap.image = bpy.data.images.load(envmap_path)
|
| 40 |
+
world.node_tree.links.new(bg.inputs['Color'], envmap.outputs['Color'])
|
| 41 |
+
|
| 42 |
+
|
| 43 |
+
def turn_off_metallic():
|
| 44 |
+
# use for albedo rendering, metallic will affect the color
|
| 45 |
+
materials = bproc.material.collect_all()
|
| 46 |
+
for mat in materials:
|
| 47 |
+
mat.set_principled_shader_value('Metallic', 0.0)
|
| 48 |
+
|
| 49 |
+
|
| 50 |
+
def camera_pose(azimuth, elevation, radius=1.5):
|
| 51 |
+
"""Camera look at the origin."""
|
| 52 |
+
azimuth = np.deg2rad(azimuth)
|
| 53 |
+
elevation = np.deg2rad(elevation)
|
| 54 |
+
|
| 55 |
+
x = radius * np.cos(azimuth) * np.cos(elevation)
|
| 56 |
+
y = -radius * np.sin(azimuth) * np.cos(elevation)
|
| 57 |
+
z = radius * np.sin(elevation)
|
| 58 |
+
camera_position = np.array([x, y, z])
|
| 59 |
+
|
| 60 |
+
camera_forward = camera_position / np.linalg.norm(camera_position)
|
| 61 |
+
camera_right = np.cross(np.array([0.0, 0.0, 1.0]), camera_forward)
|
| 62 |
+
camera_right /= np.linalg.norm(camera_right)
|
| 63 |
+
camera_up = np.cross(camera_forward, camera_right)
|
| 64 |
+
camera_up /= np.linalg.norm(camera_up)
|
| 65 |
+
|
| 66 |
+
camera_pose = np.eye(4)
|
| 67 |
+
camera_pose[:3, 0] = camera_right
|
| 68 |
+
camera_pose[:3, 1] = camera_up
|
| 69 |
+
camera_pose[:3, 2] = camera_forward
|
| 70 |
+
camera_pose[:3, 3] = camera_position
|
| 71 |
+
|
| 72 |
+
return camera_pose
|
| 73 |
+
|
| 74 |
+
|
| 75 |
+
def scene_root_objects():
|
| 76 |
+
for obj in bpy.context.scene.objects.values():
|
| 77 |
+
if not obj.parent:
|
| 78 |
+
yield obj
|
| 79 |
+
|
| 80 |
+
|
| 81 |
+
def scene_meshes():
|
| 82 |
+
for obj in bpy.context.scene.objects.values():
|
| 83 |
+
if isinstance(obj.data, (bpy.types.Mesh)):
|
| 84 |
+
yield obj
|
| 85 |
+
|
| 86 |
+
|
| 87 |
+
def scene_bbox(single_obj=None, ignore_matrix=False):
|
| 88 |
+
bbox_min = (math.inf,) * 3
|
| 89 |
+
bbox_max = (-math.inf,) * 3
|
| 90 |
+
found = False
|
| 91 |
+
for obj in scene_meshes() if single_obj is None else [single_obj]:
|
| 92 |
+
found = True
|
| 93 |
+
for coord in obj.bound_box:
|
| 94 |
+
coord = Vector(coord)
|
| 95 |
+
if not ignore_matrix:
|
| 96 |
+
coord = obj.matrix_world @ coord
|
| 97 |
+
bbox_min = tuple(min(x, y) for x, y in zip(bbox_min, coord))
|
| 98 |
+
bbox_max = tuple(max(x, y) for x, y in zip(bbox_max, coord))
|
| 99 |
+
if not found:
|
| 100 |
+
raise RuntimeError("no objects in scene to compute bounding box for")
|
| 101 |
+
return Vector(bbox_min), Vector(bbox_max)
|
| 102 |
+
|
| 103 |
+
|
| 104 |
+
def normalize_scene():
|
| 105 |
+
bbox_min, bbox_max = scene_bbox()
|
| 106 |
+
|
| 107 |
+
scale = 1 / max(bbox_max - bbox_min)
|
| 108 |
+
for obj in scene_root_objects():
|
| 109 |
+
obj.scale = obj.scale * scale
|
| 110 |
+
# Apply scale to matrix_world.
|
| 111 |
+
bpy.context.view_layer.update()
|
| 112 |
+
bbox_min, bbox_max = scene_bbox()
|
| 113 |
+
offset = -(bbox_min + bbox_max) / 2
|
| 114 |
+
for obj in scene_root_objects():
|
| 115 |
+
obj.matrix_world.translation += offset
|
| 116 |
+
bpy.ops.object.select_all(action="DESELECT")
|
| 117 |
+
|
| 118 |
+
return scale, offset
|
| 119 |
+
|
| 120 |
+
|
| 121 |
+
def reset_normal():
|
| 122 |
+
"""experimental!!!
|
| 123 |
+
reset normal
|
| 124 |
+
"""
|
| 125 |
+
for obj in scene_meshes():
|
| 126 |
+
bpy.context.view_layer.objects.active = obj
|
| 127 |
+
bpy.ops.object.mode_set(mode='EDIT')
|
| 128 |
+
bpy.ops.mesh.normals_tools(mode='RESET')
|
| 129 |
+
bpy.ops.object.mode_set(mode='OBJECT')
|
| 130 |
+
|
| 131 |
+
|
| 132 |
+
def change_to_orm():
|
| 133 |
+
materials = bproc.material.collect_all()
|
| 134 |
+
for mat in materials:
|
| 135 |
+
orm_color = mat.nodes.new(type='ShaderNodeCombineRGB')
|
| 136 |
+
principled_bsdf = mat.get_the_one_node_with_type("BsdfPrincipled")
|
| 137 |
+
|
| 138 |
+
# metallic -> Blue
|
| 139 |
+
if principled_bsdf.inputs['Metallic'].links:
|
| 140 |
+
metallic_from_socket = principled_bsdf.inputs['Metallic'].links[0].from_socket
|
| 141 |
+
metallic_link = mat.links.new(metallic_from_socket, orm_color.inputs['B'])
|
| 142 |
+
mat.links.remove(principled_bsdf.inputs['Metallic'].links[0])
|
| 143 |
+
else:
|
| 144 |
+
metallic_value = principled_bsdf.inputs['Metallic'].default_value
|
| 145 |
+
orm_color.inputs['B'].default_value = metallic_value
|
| 146 |
+
principled_bsdf.inputs['Metallic'].default_value = 0.0
|
| 147 |
+
# roughness -> Green
|
| 148 |
+
if principled_bsdf.inputs['Roughness'].links:
|
| 149 |
+
roughness_from_socket = principled_bsdf.inputs['Roughness'].links[0].from_socket
|
| 150 |
+
roughness_link = mat.links.new(roughness_from_socket, orm_color.inputs['G'])
|
| 151 |
+
mat.links.remove(principled_bsdf.inputs['Roughness'].links[0])
|
| 152 |
+
else:
|
| 153 |
+
roughness_value = principled_bsdf.inputs['Roughness'].default_value
|
| 154 |
+
orm_color.inputs['G'].default_value = roughness_value
|
| 155 |
+
principled_bsdf.inputs['Roughness'].default_value = 0.5
|
| 156 |
+
|
| 157 |
+
# link orm_color to principled_bsdf as base color
|
| 158 |
+
mat.links.new(orm_color.outputs['Image'], principled_bsdf.inputs['Base Color'])
|
| 159 |
+
|
| 160 |
+
|
| 161 |
+
def is_bsdf():
|
| 162 |
+
for mat in bproc.material.collect_all():
|
| 163 |
+
node = mat.get_nodes_with_type('BsdfPrincipled')
|
| 164 |
+
if node and len(node) == 1:
|
| 165 |
+
pass
|
| 166 |
+
else:
|
| 167 |
+
return False
|
| 168 |
+
return True
|
| 169 |
+
|
| 170 |
+
|
| 171 |
+
def sample_sphere(num_samples):
|
| 172 |
+
radiuss = np.random.uniform(1.5, 2.0, size=num_samples)
|
| 173 |
+
azimuth = np.random.uniform(0, 360, size=num_samples)
|
| 174 |
+
elevation = np.random.uniform(-90, 90, size=num_samples)
|
| 175 |
+
return radiuss, azimuth, elevation
|
| 176 |
+
|
| 177 |
+
|
| 178 |
+
bproc.init()
|
| 179 |
+
# bproc.renderer.set_render_devices(use_only_cpu=True)
|
| 180 |
+
# bpy.context.scene.view_settings.view_transform = 'Raw' # do not use sRGB
|
| 181 |
+
|
| 182 |
+
glb_path = args.glb_path
|
| 183 |
+
output_dir = args.output_dir
|
| 184 |
+
obj_name = os.path.basename(glb_path).split('.')[0]
|
| 185 |
+
load_object(glb_path)
|
| 186 |
+
|
| 187 |
+
scale, offset = normalize_scene()
|
| 188 |
+
|
| 189 |
+
reset_normal()
|
| 190 |
+
turn_off_metallic()
|
| 191 |
+
|
| 192 |
+
# load camera info
|
| 193 |
+
with open(os.path.join(output_dir, obj_name, 'camera.json'), 'r') as f:
|
| 194 |
+
meta_info = json.load(f)
|
| 195 |
+
radiuss = np.array(meta_info['raidus'])
|
| 196 |
+
azimuths = np.array(meta_info['azimuths'])
|
| 197 |
+
elevations = np.array(meta_info['elevations'])
|
| 198 |
+
# set camera
|
| 199 |
+
bproc.camera.set_resolution(512, 512)
|
| 200 |
+
for radius, azimuth, elevation in zip(radiuss, azimuths, elevations):
|
| 201 |
+
cam_pose = camera_pose(azimuth, elevation, radius=radius)
|
| 202 |
+
bproc.camera.add_camera_pose(cam_pose)
|
| 203 |
+
|
| 204 |
+
bproc.renderer.enable_diffuse_color_output()
|
| 205 |
+
|
| 206 |
+
bproc.renderer.set_output_format(enable_transparency=True)
|
| 207 |
+
|
| 208 |
+
data = bproc.renderer.render()
|
| 209 |
+
|
| 210 |
+
for i in range(len(azimuths)):
|
| 211 |
+
image = data['diffuse'][i]
|
| 212 |
+
Image.fromarray(image).save(os.path.join(output_dir, obj_name, f'albedo_{i:02d}.png'))
|
rendering/render_color.py
ADDED
|
@@ -0,0 +1,279 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import blenderproc as bproc
|
| 2 |
+
import numpy as np
|
| 3 |
+
import os
|
| 4 |
+
os.environ["OPENCV_IO_ENABLE_OPENEXR"]="1"
|
| 5 |
+
import json
|
| 6 |
+
import bpy
|
| 7 |
+
import cv2
|
| 8 |
+
import glob
|
| 9 |
+
import random
|
| 10 |
+
from PIL import Image
|
| 11 |
+
import math
|
| 12 |
+
from mathutils import Vector, Matrix
|
| 13 |
+
import argparse
|
| 14 |
+
|
| 15 |
+
parser = argparse.ArgumentParser()
|
| 16 |
+
parser.add_argument('--glb_path', type=str)
|
| 17 |
+
parser.add_argument('--hdri_path', type=str, default=None)
|
| 18 |
+
parser.add_argument('--output_dir', type=str, default='output')
|
| 19 |
+
args = parser.parse_args()
|
| 20 |
+
|
| 21 |
+
# load the glb model
|
| 22 |
+
def load_object(object_path: str) -> None:
|
| 23 |
+
"""Loads a glb model into the scene."""
|
| 24 |
+
if object_path.endswith(".glb") or object_path.endswith(".gltf"):
|
| 25 |
+
bpy.ops.import_scene.gltf(filepath=object_path, merge_vertices=False)
|
| 26 |
+
elif object_path.endswith(".fbx"):
|
| 27 |
+
bpy.ops.import_scene.fbx(filepath=object_path)
|
| 28 |
+
elif object_path.endswith(".obj"):
|
| 29 |
+
bpy.ops.import_scene.obj(filepath=object_path)
|
| 30 |
+
elif object_path.endswith(".ply"):
|
| 31 |
+
bpy.ops.import_mesh.ply(filepath=object_path)
|
| 32 |
+
else:
|
| 33 |
+
raise ValueError(f"Unsupported file type: {object_path}")
|
| 34 |
+
|
| 35 |
+
|
| 36 |
+
def load_envmap(envmap_path: str) -> None:
|
| 37 |
+
"""Loads an environment map into the scene."""
|
| 38 |
+
world = bpy.context.scene.world
|
| 39 |
+
world.use_nodes = True
|
| 40 |
+
bg = world.node_tree.nodes['Background']
|
| 41 |
+
envmap = world.node_tree.nodes.new('ShaderNodeTexEnvironment')
|
| 42 |
+
envmap.image = bpy.data.images.load(envmap_path)
|
| 43 |
+
world.node_tree.links.new(bg.inputs['Color'], envmap.outputs['Color'])
|
| 44 |
+
|
| 45 |
+
|
| 46 |
+
def turn_off_metallic():
|
| 47 |
+
# use for albedo rendering, metallic will affect the color
|
| 48 |
+
materials = bproc.material.collect_all()
|
| 49 |
+
for mat in materials:
|
| 50 |
+
mat.set_principled_shader_value('Metallic', 0.0)
|
| 51 |
+
|
| 52 |
+
|
| 53 |
+
def camera_pose(azimuth, elevation, radius=1.5):
|
| 54 |
+
"""Camera look at the origin."""
|
| 55 |
+
azimuth = np.deg2rad(azimuth)
|
| 56 |
+
elevation = np.deg2rad(elevation)
|
| 57 |
+
|
| 58 |
+
x = radius * np.cos(azimuth) * np.cos(elevation)
|
| 59 |
+
y = -radius * np.sin(azimuth) * np.cos(elevation)
|
| 60 |
+
z = radius * np.sin(elevation)
|
| 61 |
+
camera_position = np.array([x, y, z])
|
| 62 |
+
|
| 63 |
+
camera_forward = camera_position / np.linalg.norm(camera_position)
|
| 64 |
+
camera_right = np.cross(np.array([0.0, 0.0, 1.0]), camera_forward)
|
| 65 |
+
camera_right /= np.linalg.norm(camera_right)
|
| 66 |
+
camera_up = np.cross(camera_forward, camera_right)
|
| 67 |
+
camera_up /= np.linalg.norm(camera_up)
|
| 68 |
+
|
| 69 |
+
camera_pose = np.eye(4)
|
| 70 |
+
camera_pose[:3, 0] = camera_right
|
| 71 |
+
camera_pose[:3, 1] = camera_up
|
| 72 |
+
camera_pose[:3, 2] = camera_forward
|
| 73 |
+
camera_pose[:3, 3] = camera_position
|
| 74 |
+
|
| 75 |
+
return camera_pose
|
| 76 |
+
|
| 77 |
+
|
| 78 |
+
def scene_root_objects():
|
| 79 |
+
for obj in bpy.context.scene.objects.values():
|
| 80 |
+
if not obj.parent:
|
| 81 |
+
yield obj
|
| 82 |
+
|
| 83 |
+
|
| 84 |
+
def scene_meshes():
|
| 85 |
+
for obj in bpy.context.scene.objects.values():
|
| 86 |
+
if isinstance(obj.data, (bpy.types.Mesh)):
|
| 87 |
+
yield obj
|
| 88 |
+
|
| 89 |
+
|
| 90 |
+
def scene_bbox(single_obj=None, ignore_matrix=False):
|
| 91 |
+
bbox_min = (math.inf,) * 3
|
| 92 |
+
bbox_max = (-math.inf,) * 3
|
| 93 |
+
found = False
|
| 94 |
+
for obj in scene_meshes() if single_obj is None else [single_obj]:
|
| 95 |
+
found = True
|
| 96 |
+
for coord in obj.bound_box:
|
| 97 |
+
coord = Vector(coord)
|
| 98 |
+
if not ignore_matrix:
|
| 99 |
+
coord = obj.matrix_world @ coord
|
| 100 |
+
bbox_min = tuple(min(x, y) for x, y in zip(bbox_min, coord))
|
| 101 |
+
bbox_max = tuple(max(x, y) for x, y in zip(bbox_max, coord))
|
| 102 |
+
if not found:
|
| 103 |
+
raise RuntimeError("no objects in scene to compute bounding box for")
|
| 104 |
+
return Vector(bbox_min), Vector(bbox_max)
|
| 105 |
+
|
| 106 |
+
|
| 107 |
+
def normalize_scene():
|
| 108 |
+
bbox_min, bbox_max = scene_bbox()
|
| 109 |
+
|
| 110 |
+
scale = 1 / max(bbox_max - bbox_min)
|
| 111 |
+
for obj in scene_root_objects():
|
| 112 |
+
obj.scale = obj.scale * scale
|
| 113 |
+
# Apply scale to matrix_world.
|
| 114 |
+
bpy.context.view_layer.update()
|
| 115 |
+
bbox_min, bbox_max = scene_bbox()
|
| 116 |
+
offset = -(bbox_min + bbox_max) / 2
|
| 117 |
+
for obj in scene_root_objects():
|
| 118 |
+
obj.matrix_world.translation += offset
|
| 119 |
+
bpy.ops.object.select_all(action="DESELECT")
|
| 120 |
+
|
| 121 |
+
return scale, offset
|
| 122 |
+
|
| 123 |
+
|
| 124 |
+
def reset_normal():
|
| 125 |
+
"""experimental!!!
|
| 126 |
+
reset normal
|
| 127 |
+
"""
|
| 128 |
+
for obj in scene_meshes():
|
| 129 |
+
bpy.context.view_layer.objects.active = obj
|
| 130 |
+
bpy.ops.object.mode_set(mode='EDIT')
|
| 131 |
+
bpy.ops.mesh.normals_tools(mode='RESET')
|
| 132 |
+
bpy.ops.object.mode_set(mode='OBJECT')
|
| 133 |
+
|
| 134 |
+
|
| 135 |
+
def change_to_orm():
|
| 136 |
+
materials = bproc.material.collect_all()
|
| 137 |
+
for mat in materials:
|
| 138 |
+
orm_color = mat.nodes.new(type='ShaderNodeCombineRGB')
|
| 139 |
+
principled_bsdf = mat.get_the_one_node_with_type("BsdfPrincipled")
|
| 140 |
+
|
| 141 |
+
# metallic -> Blue
|
| 142 |
+
if principled_bsdf.inputs['Metallic'].links:
|
| 143 |
+
metallic_from_socket = principled_bsdf.inputs['Metallic'].links[0].from_socket
|
| 144 |
+
metallic_link = mat.links.new(metallic_from_socket, orm_color.inputs['B'])
|
| 145 |
+
mat.links.remove(principled_bsdf.inputs['Metallic'].links[0])
|
| 146 |
+
else:
|
| 147 |
+
metallic_value = principled_bsdf.inputs['Metallic'].default_value
|
| 148 |
+
orm_color.inputs['B'].default_value = metallic_value
|
| 149 |
+
principled_bsdf.inputs['Metallic'].default_value = 0.0
|
| 150 |
+
# roughness -> Green
|
| 151 |
+
if principled_bsdf.inputs['Roughness'].links:
|
| 152 |
+
roughness_from_socket = principled_bsdf.inputs['Roughness'].links[0].from_socket
|
| 153 |
+
roughness_link = mat.links.new(roughness_from_socket, orm_color.inputs['G'])
|
| 154 |
+
mat.links.remove(principled_bsdf.inputs['Roughness'].links[0])
|
| 155 |
+
else:
|
| 156 |
+
roughness_value = principled_bsdf.inputs['Roughness'].default_value
|
| 157 |
+
orm_color.inputs['G'].default_value = roughness_value
|
| 158 |
+
principled_bsdf.inputs['Roughness'].default_value = 0.5
|
| 159 |
+
|
| 160 |
+
# link orm_color to principled_bsdf as base color
|
| 161 |
+
mat.links.new(orm_color.outputs['Image'], principled_bsdf.inputs['Base Color'])
|
| 162 |
+
|
| 163 |
+
|
| 164 |
+
def is_bsdf():
|
| 165 |
+
for mat in bproc.material.collect_all():
|
| 166 |
+
node = mat.get_nodes_with_type('BsdfPrincipled')
|
| 167 |
+
if node and len(node) == 1:
|
| 168 |
+
pass
|
| 169 |
+
else:
|
| 170 |
+
return False
|
| 171 |
+
return True
|
| 172 |
+
|
| 173 |
+
|
| 174 |
+
def sample_sphere(num_samples):
|
| 175 |
+
radiuss = np.random.uniform(1.5, 2.0, size=num_samples)
|
| 176 |
+
azimuth = np.random.uniform(0, 360, size=num_samples)
|
| 177 |
+
elevation = np.random.uniform(-90, 90, size=num_samples)
|
| 178 |
+
return radiuss, azimuth, elevation
|
| 179 |
+
|
| 180 |
+
|
| 181 |
+
def remove_lighting():
|
| 182 |
+
# remove world background lighting
|
| 183 |
+
world = bpy.context.scene.world
|
| 184 |
+
nodes = world.node_tree.nodes
|
| 185 |
+
for node in nodes:
|
| 186 |
+
if node.type == 'TEX_ENVIRONMENT':
|
| 187 |
+
nodes.remove(node)
|
| 188 |
+
# remove all lights
|
| 189 |
+
for obj in bpy.context.scene.objects.values():
|
| 190 |
+
if obj.type == 'LIGHT':
|
| 191 |
+
bpy.data.objects.remove(obj)
|
| 192 |
+
|
| 193 |
+
|
| 194 |
+
def set_point_light():
|
| 195 |
+
light = bproc.types.Light()
|
| 196 |
+
light.set_type('POINT')
|
| 197 |
+
light.set_location(bproc.sampler.shell(
|
| 198 |
+
center=[0, 0, 0],
|
| 199 |
+
radius_min=5,
|
| 200 |
+
radius_max=7,
|
| 201 |
+
elevation_min=-35,
|
| 202 |
+
elevation_max=70
|
| 203 |
+
))
|
| 204 |
+
light.set_energy(500)
|
| 205 |
+
return light
|
| 206 |
+
|
| 207 |
+
|
| 208 |
+
bproc.init()
|
| 209 |
+
# bproc.renderer.set_render_devices(use_only_cpu=True)
|
| 210 |
+
# bpy.context.scene.view_settings.view_transform = 'Raw' # do not use sRGB
|
| 211 |
+
|
| 212 |
+
glb_path = args.glb_path
|
| 213 |
+
output_dir = args.output_dir
|
| 214 |
+
obj_name = os.path.basename(glb_path).split('.')[0]
|
| 215 |
+
load_object(glb_path)
|
| 216 |
+
|
| 217 |
+
scale, offset = normalize_scene()
|
| 218 |
+
|
| 219 |
+
reset_normal()
|
| 220 |
+
|
| 221 |
+
# load camera info
|
| 222 |
+
with open(os.path.join(output_dir, obj_name, 'camera.json'), 'r') as f:
|
| 223 |
+
meta_info = json.load(f)
|
| 224 |
+
radiuss = np.array(meta_info['raidus'])
|
| 225 |
+
azimuths = np.array(meta_info['azimuths'])
|
| 226 |
+
elevations = np.array(meta_info['elevations'])
|
| 227 |
+
|
| 228 |
+
# set camera
|
| 229 |
+
bproc.camera.set_resolution(512, 512)
|
| 230 |
+
for radius, azimuth, elevation in zip(radiuss, azimuths, elevations):
|
| 231 |
+
cam_pose = camera_pose(azimuth, elevation, radius=radius)
|
| 232 |
+
bproc.camera.add_camera_pose(cam_pose)
|
| 233 |
+
|
| 234 |
+
lighting_fn = os.path.join(output_dir, obj_name, 'lighting.json')
|
| 235 |
+
if os.path.exists(lighting_fn):
|
| 236 |
+
with open(lighting_fn, 'r') as f:
|
| 237 |
+
lighting_info = json.load(f)
|
| 238 |
+
else:
|
| 239 |
+
lighting_info = []
|
| 240 |
+
|
| 241 |
+
hdr_file = args.hdri_path
|
| 242 |
+
|
| 243 |
+
if hdr_file is not None:
|
| 244 |
+
bproc.world.set_world_background_hdr_img(hdr_file)
|
| 245 |
+
|
| 246 |
+
bproc.renderer.set_output_format(enable_transparency=True)
|
| 247 |
+
data = bproc.renderer.render()
|
| 248 |
+
|
| 249 |
+
for i in range(len(azimuths)):
|
| 250 |
+
image = data['colors'][i]
|
| 251 |
+
Image.fromarray(image).save(os.path.join(output_dir, obj_name, f'color_{len(lighting_info)}_{i:02d}.png'))
|
| 252 |
+
|
| 253 |
+
lighting_info.append(
|
| 254 |
+
{
|
| 255 |
+
'type': 'hdri',
|
| 256 |
+
'path': os.path.basename(hdr_file),
|
| 257 |
+
}
|
| 258 |
+
)
|
| 259 |
+
|
| 260 |
+
else:
|
| 261 |
+
# Point lighting, 1 sample
|
| 262 |
+
remove_lighting()
|
| 263 |
+
light1 = set_point_light()
|
| 264 |
+
light2 = set_point_light()
|
| 265 |
+
bproc.renderer.set_output_format(enable_transparency=True)
|
| 266 |
+
data = bproc.renderer.render()
|
| 267 |
+
for i in range(len(azimuths)):
|
| 268 |
+
image = data['colors'][i]
|
| 269 |
+
Image.fromarray(image).save(os.path.join(output_dir, obj_name, f'color_{len(lighting_info)}_{i:02d}.png'))
|
| 270 |
+
lighting_info.append(
|
| 271 |
+
{
|
| 272 |
+
'type': 'point',
|
| 273 |
+
'locations': [light1.get_location().tolist(), light2.get_location().tolist()],
|
| 274 |
+
'energys': [light1.get_energy(), light2.get_energy()],
|
| 275 |
+
}
|
| 276 |
+
)
|
| 277 |
+
|
| 278 |
+
with open(lighting_fn, 'w') as f:
|
| 279 |
+
json.dump(lighting_info, f, indent=4)
|
rendering/render_normal_orm.py
ADDED
|
@@ -0,0 +1,228 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import blenderproc as bproc
|
| 2 |
+
import numpy as np
|
| 3 |
+
import os
|
| 4 |
+
os.environ["OPENCV_IO_ENABLE_OPENEXR"]="1"
|
| 5 |
+
import json
|
| 6 |
+
import bpy
|
| 7 |
+
import cv2
|
| 8 |
+
from PIL import Image
|
| 9 |
+
import math
|
| 10 |
+
from mathutils import Vector, Matrix
|
| 11 |
+
import argparse
|
| 12 |
+
|
| 13 |
+
parser = argparse.ArgumentParser()
|
| 14 |
+
parser.add_argument('--glb_path', type=str)
|
| 15 |
+
parser.add_argument('--output_dir', type=str, default='output')
|
| 16 |
+
args = parser.parse_args()
|
| 17 |
+
|
| 18 |
+
# load the glb model
|
| 19 |
+
def load_object(object_path: str) -> None:
|
| 20 |
+
"""Loads a glb model into the scene."""
|
| 21 |
+
if object_path.endswith(".glb") or object_path.endswith(".gltf"):
|
| 22 |
+
bpy.ops.import_scene.gltf(filepath=object_path, merge_vertices=False)
|
| 23 |
+
elif object_path.endswith(".fbx"):
|
| 24 |
+
bpy.ops.import_scene.fbx(filepath=object_path)
|
| 25 |
+
elif object_path.endswith(".obj"):
|
| 26 |
+
bpy.ops.import_scene.obj(filepath=object_path)
|
| 27 |
+
elif object_path.endswith(".ply"):
|
| 28 |
+
bpy.ops.import_mesh.ply(filepath=object_path)
|
| 29 |
+
else:
|
| 30 |
+
raise ValueError(f"Unsupported file type: {object_path}")
|
| 31 |
+
|
| 32 |
+
|
| 33 |
+
def load_envmap(envmap_path: str) -> None:
|
| 34 |
+
"""Loads an environment map into the scene."""
|
| 35 |
+
world = bpy.context.scene.world
|
| 36 |
+
world.use_nodes = True
|
| 37 |
+
bg = world.node_tree.nodes['Background']
|
| 38 |
+
envmap = world.node_tree.nodes.new('ShaderNodeTexEnvironment')
|
| 39 |
+
envmap.image = bpy.data.images.load(envmap_path)
|
| 40 |
+
world.node_tree.links.new(bg.inputs['Color'], envmap.outputs['Color'])
|
| 41 |
+
|
| 42 |
+
|
| 43 |
+
def turn_off_metallic():
|
| 44 |
+
# use for albedo rendering, metallic will affect the color
|
| 45 |
+
materials = bproc.material.collect_all()
|
| 46 |
+
for mat in materials:
|
| 47 |
+
mat.set_principled_shader_value('Metallic', 0.0)
|
| 48 |
+
|
| 49 |
+
|
| 50 |
+
def camera_pose(azimuth, elevation, radius=1.5):
|
| 51 |
+
"""Camera look at the origin."""
|
| 52 |
+
azimuth = np.deg2rad(azimuth)
|
| 53 |
+
elevation = np.deg2rad(elevation)
|
| 54 |
+
|
| 55 |
+
x = radius * np.cos(azimuth) * np.cos(elevation)
|
| 56 |
+
y = -radius * np.sin(azimuth) * np.cos(elevation)
|
| 57 |
+
z = radius * np.sin(elevation)
|
| 58 |
+
camera_position = np.array([x, y, z])
|
| 59 |
+
|
| 60 |
+
camera_forward = camera_position / np.linalg.norm(camera_position)
|
| 61 |
+
camera_right = np.cross(np.array([0.0, 0.0, 1.0]), camera_forward)
|
| 62 |
+
camera_right /= np.linalg.norm(camera_right)
|
| 63 |
+
camera_up = np.cross(camera_forward, camera_right)
|
| 64 |
+
camera_up /= np.linalg.norm(camera_up)
|
| 65 |
+
|
| 66 |
+
camera_pose = np.eye(4)
|
| 67 |
+
camera_pose[:3, 0] = camera_right
|
| 68 |
+
camera_pose[:3, 1] = camera_up
|
| 69 |
+
camera_pose[:3, 2] = camera_forward
|
| 70 |
+
camera_pose[:3, 3] = camera_position
|
| 71 |
+
|
| 72 |
+
return camera_pose
|
| 73 |
+
|
| 74 |
+
|
| 75 |
+
def scene_root_objects():
|
| 76 |
+
for obj in bpy.context.scene.objects.values():
|
| 77 |
+
if not obj.parent:
|
| 78 |
+
yield obj
|
| 79 |
+
|
| 80 |
+
|
| 81 |
+
def scene_meshes():
|
| 82 |
+
for obj in bpy.context.scene.objects.values():
|
| 83 |
+
if isinstance(obj.data, (bpy.types.Mesh)):
|
| 84 |
+
yield obj
|
| 85 |
+
|
| 86 |
+
|
| 87 |
+
def scene_bbox(single_obj=None, ignore_matrix=False):
|
| 88 |
+
bbox_min = (math.inf,) * 3
|
| 89 |
+
bbox_max = (-math.inf,) * 3
|
| 90 |
+
found = False
|
| 91 |
+
for obj in scene_meshes() if single_obj is None else [single_obj]:
|
| 92 |
+
found = True
|
| 93 |
+
for coord in obj.bound_box:
|
| 94 |
+
coord = Vector(coord)
|
| 95 |
+
if not ignore_matrix:
|
| 96 |
+
coord = obj.matrix_world @ coord
|
| 97 |
+
bbox_min = tuple(min(x, y) for x, y in zip(bbox_min, coord))
|
| 98 |
+
bbox_max = tuple(max(x, y) for x, y in zip(bbox_max, coord))
|
| 99 |
+
if not found:
|
| 100 |
+
raise RuntimeError("no objects in scene to compute bounding box for")
|
| 101 |
+
return Vector(bbox_min), Vector(bbox_max)
|
| 102 |
+
|
| 103 |
+
|
| 104 |
+
def normalize_scene():
|
| 105 |
+
bbox_min, bbox_max = scene_bbox()
|
| 106 |
+
|
| 107 |
+
scale = 1 / max(bbox_max - bbox_min)
|
| 108 |
+
for obj in scene_root_objects():
|
| 109 |
+
obj.scale = obj.scale * scale
|
| 110 |
+
# Apply scale to matrix_world.
|
| 111 |
+
bpy.context.view_layer.update()
|
| 112 |
+
bbox_min, bbox_max = scene_bbox()
|
| 113 |
+
offset = -(bbox_min + bbox_max) / 2
|
| 114 |
+
for obj in scene_root_objects():
|
| 115 |
+
obj.matrix_world.translation += offset
|
| 116 |
+
bpy.ops.object.select_all(action="DESELECT")
|
| 117 |
+
|
| 118 |
+
return scale, offset
|
| 119 |
+
|
| 120 |
+
|
| 121 |
+
def reset_normal():
|
| 122 |
+
"""experimental!!!
|
| 123 |
+
reset normal
|
| 124 |
+
"""
|
| 125 |
+
for obj in scene_meshes():
|
| 126 |
+
bpy.context.view_layer.objects.active = obj
|
| 127 |
+
bpy.ops.object.mode_set(mode='EDIT')
|
| 128 |
+
bpy.ops.mesh.normals_tools(mode='RESET')
|
| 129 |
+
bpy.ops.object.mode_set(mode='OBJECT')
|
| 130 |
+
|
| 131 |
+
|
| 132 |
+
def change_to_orm():
|
| 133 |
+
materials = bproc.material.collect_all()
|
| 134 |
+
for mat in materials:
|
| 135 |
+
orm_color = mat.nodes.new(type='ShaderNodeCombineRGB')
|
| 136 |
+
principled_bsdf = mat.get_the_one_node_with_type("BsdfPrincipled")
|
| 137 |
+
|
| 138 |
+
# metallic -> Blue
|
| 139 |
+
if principled_bsdf.inputs['Metallic'].links:
|
| 140 |
+
metallic_from_socket = principled_bsdf.inputs['Metallic'].links[0].from_socket
|
| 141 |
+
metallic_link = mat.links.new(metallic_from_socket, orm_color.inputs['B'])
|
| 142 |
+
mat.links.remove(principled_bsdf.inputs['Metallic'].links[0])
|
| 143 |
+
else:
|
| 144 |
+
metallic_value = principled_bsdf.inputs['Metallic'].default_value
|
| 145 |
+
orm_color.inputs['B'].default_value = metallic_value
|
| 146 |
+
principled_bsdf.inputs['Metallic'].default_value = 0.0
|
| 147 |
+
# roughness -> Green
|
| 148 |
+
if principled_bsdf.inputs['Roughness'].links:
|
| 149 |
+
roughness_from_socket = principled_bsdf.inputs['Roughness'].links[0].from_socket
|
| 150 |
+
roughness_link = mat.links.new(roughness_from_socket, orm_color.inputs['G'])
|
| 151 |
+
mat.links.remove(principled_bsdf.inputs['Roughness'].links[0])
|
| 152 |
+
else:
|
| 153 |
+
roughness_value = principled_bsdf.inputs['Roughness'].default_value
|
| 154 |
+
orm_color.inputs['G'].default_value = roughness_value
|
| 155 |
+
principled_bsdf.inputs['Roughness'].default_value = 0.5
|
| 156 |
+
|
| 157 |
+
# link orm_color to principled_bsdf as base color
|
| 158 |
+
mat.links.new(orm_color.outputs['Image'], principled_bsdf.inputs['Base Color'])
|
| 159 |
+
|
| 160 |
+
|
| 161 |
+
def is_bsdf():
|
| 162 |
+
for mat in bproc.material.collect_all():
|
| 163 |
+
node = mat.get_nodes_with_type('BsdfPrincipled')
|
| 164 |
+
if node and len(node) == 1:
|
| 165 |
+
pass
|
| 166 |
+
else:
|
| 167 |
+
return False
|
| 168 |
+
return True
|
| 169 |
+
|
| 170 |
+
|
| 171 |
+
def sample_sphere(num_samples):
|
| 172 |
+
radiuss = np.random.uniform(1.5, 2.0, size=num_samples)
|
| 173 |
+
azimuth = np.random.uniform(0, 360, size=num_samples)
|
| 174 |
+
elevation = np.random.uniform(-90, 90, size=num_samples)
|
| 175 |
+
return radiuss, azimuth, elevation
|
| 176 |
+
|
| 177 |
+
|
| 178 |
+
NUM_IMAGES = 12
|
| 179 |
+
|
| 180 |
+
meta_info = {'transform_matrix': []}
|
| 181 |
+
|
| 182 |
+
bproc.init()
|
| 183 |
+
# bproc.renderer.set_render_devices(use_only_cpu=True)
|
| 184 |
+
bpy.context.scene.view_settings.view_transform = 'Raw' # do not use sRGB
|
| 185 |
+
|
| 186 |
+
glb_path = args.glb_path
|
| 187 |
+
obj_name = os.path.basename(glb_path).split('.')[0]
|
| 188 |
+
load_object(glb_path)
|
| 189 |
+
|
| 190 |
+
if not is_bsdf():
|
| 191 |
+
exit()
|
| 192 |
+
|
| 193 |
+
scale, offset = normalize_scene()
|
| 194 |
+
meta_info['scale'] = scale
|
| 195 |
+
meta_info['offset'] = offset.to_tuple()
|
| 196 |
+
|
| 197 |
+
reset_normal()
|
| 198 |
+
change_to_orm()
|
| 199 |
+
|
| 200 |
+
radiuss, azimuths, elevations = sample_sphere(NUM_IMAGES)
|
| 201 |
+
meta_info['raidus'] = radiuss.tolist()
|
| 202 |
+
meta_info['azimuths'] = azimuths.tolist()
|
| 203 |
+
meta_info['elevations'] = elevations.tolist()
|
| 204 |
+
|
| 205 |
+
# set camera
|
| 206 |
+
bproc.camera.set_resolution(512, 512)
|
| 207 |
+
for radius, azimuth, elevation in zip(radiuss, azimuths, elevations):
|
| 208 |
+
cam_pose = camera_pose(azimuth, elevation, radius=radius)
|
| 209 |
+
bproc.camera.add_camera_pose(cam_pose)
|
| 210 |
+
meta_info['transform_matrix'].append(cam_pose.tolist())
|
| 211 |
+
|
| 212 |
+
bproc.renderer.enable_normals_output()
|
| 213 |
+
bproc.renderer.enable_diffuse_color_output()
|
| 214 |
+
|
| 215 |
+
bproc.renderer.set_output_format(enable_transparency=True)
|
| 216 |
+
|
| 217 |
+
data = bproc.renderer.render()
|
| 218 |
+
|
| 219 |
+
output_dir = args.output_dir
|
| 220 |
+
os.makedirs(os.path.join(output_dir, obj_name), exist_ok=True)
|
| 221 |
+
for i in range(len(azimuths)):
|
| 222 |
+
image = data['diffuse'][i]
|
| 223 |
+
Image.fromarray(image).save(os.path.join(output_dir, obj_name, f'orm_{i:02d}.png'))
|
| 224 |
+
normal = data['normals'][i]
|
| 225 |
+
cv2.imwrite(os.path.join(output_dir, obj_name, f'normal_{i:02d}.exr'), normal)
|
| 226 |
+
|
| 227 |
+
with open(os.path.join(output_dir, obj_name, 'camera.json'), 'w') as f:
|
| 228 |
+
json.dump(meta_info, f, indent=4)
|