
improve README
Browse files- .gitignore +6 -0
- README.md +213 -51
- pictures/Makefile +21 -0
- pictures/ws-2d.png +3 -0
- pictures/ws-2d.tex +132 -0
- pictures/ws-3d-2-3-4-5.png +3 -0
- pictures/ws-3d-2-3-4-5.tex +266 -0
.gitignore
ADDED
|
@@ -0,0 +1,6 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
*.aux
|
| 2 |
+
*.log
|
| 3 |
+
*.out
|
| 4 |
+
*.pdf
|
| 5 |
+
*.synctex.*
|
| 6 |
+
auto/
|
README.md
CHANGED
|
@@ -1,58 +1,82 @@
|
|
| 1 |
---
|
| 2 |
license: cc-by-sa-4.0
|
| 3 |
-
pretty_name: Weight Systems Defining Five-Dimensional
|
| 4 |
configs:
|
| 5 |
-
- config_name: non-reflexive
|
| 6 |
-
|
| 7 |
-
|
| 8 |
-
|
| 9 |
-
- config_name: reflexive
|
| 10 |
-
|
| 11 |
-
|
| 12 |
-
|
| 13 |
tags:
|
| 14 |
-
- physics
|
| 15 |
-
- math
|
| 16 |
---
|
| 17 |
|
| 18 |
-
#
|
| 19 |
|
| 20 |
This dataset contains all weight systems defining five-dimensional reflexive and
|
| 21 |
-
non-reflexive
|
| 22 |
-
and theoretical physics. The data was compiled by
|
| 23 |
-
[arXiv:1808.02422](https://arxiv.org/abs/1808.02422). More information is
|
| 24 |
-
[Calabi-Yau data website](http://hep.itp.tuwien.ac.at/~kreuzer/CY/). The
|
| 25 |
-
explored using the [search
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 26 |
|
| 27 |
## Dataset Details
|
| 28 |
|
| 29 |
-
The dataset consists of two subsets: weight systems defining reflexive
|
| 30 |
-
weight systems defining non-reflexive
|
| 31 |
-
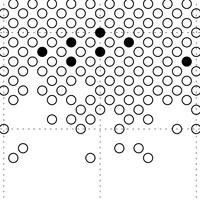
Parquet format. Rows within each file are sorted lexicographically by
|
|
|
|
| 32 |
|
| 33 |
-
Each row in the dataset represents a
|
| 34 |
along with the vertex count, facet count, and lattice point count. The reflexive dataset
|
| 35 |
also includes the Hodge numbers \\( h^{1,1} \\), \\( h^{1,2} \\), and \\( h^{1,3} \\) of
|
| 36 |
-
the corresponding Calabi-Yau manifold, and the lattice point count of the dual
|
| 37 |
|
| 38 |
For any Calabi-Yau fourfold, the Euler characteristic \\( \chi \\) and the Hodge number
|
| 39 |
\\( h^{2,2} \\) can be derived as follows:
|
|
|
|
| 40 |
$$ \chi = 48 + 6 (h^{1,1} − h^{1,2} + h^{1,3}) $$
|
|
|
|
| 41 |
$$ h^{2,2} = 44 + 4 h^{1,1} − 2 h^{1,2} + 4 h^{1,3} $$
|
| 42 |
|
| 43 |
-
This dataset is licensed under the
|
|
|
|
| 44 |
|
| 45 |
### Data Fields
|
| 46 |
|
| 47 |
-
- `weight0 to weight5
|
| 48 |
-
- `vertex_count
|
| 49 |
-
- `facet_count
|
| 50 |
-
- `point_count
|
| 51 |
-
- `dual_point_count
|
| 52 |
-
|
| 53 |
-
- `h11
|
| 54 |
-
- `h12
|
| 55 |
-
- `h13
|
| 56 |
|
| 57 |
## Usage
|
| 58 |
|
|
@@ -70,8 +94,8 @@ for row in dataset.take(5):
|
|
| 70 |
```
|
| 71 |
|
| 72 |
When cloning the Git repository with Git Large File Storage (LFS), data files are stored
|
| 73 |
-
in the Git LFS storage directory
|
| 74 |
-
|
| 75 |
commands to clone the repository:
|
| 76 |
|
| 77 |
```bash
|
|
@@ -95,22 +119,160 @@ git lfs fetch
|
|
| 95 |
git lfs dedup
|
| 96 |
```
|
| 97 |
|
| 98 |
-
##
|
| 99 |
|
| 100 |
-
|
|
|
|
|
|
|
| 101 |
|
| 102 |
-
|
| 103 |
-
|
| 104 |
-
|
| 105 |
-
|
| 106 |
-
|
| 107 |
-
|
| 108 |
-
|
| 109 |
-
|
| 110 |
-
|
| 111 |
-
|
| 112 |
-
|
| 113 |
-
|
| 114 |
-
|
| 115 |
-
|
| 116 |
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
---
|
| 2 |
license: cc-by-sa-4.0
|
| 3 |
+
pretty_name: Weight Systems Defining Five-Dimensional IP Lattice Polytopes
|
| 4 |
configs:
|
| 5 |
+
- config_name: non-reflexive
|
| 6 |
+
data_files:
|
| 7 |
+
- split: full
|
| 8 |
+
path: non-reflexive/*.parquet
|
| 9 |
+
- config_name: reflexive
|
| 10 |
+
data_files:
|
| 11 |
+
- split: full
|
| 12 |
+
path: reflexive/*.parquet
|
| 13 |
tags:
|
| 14 |
+
- physics
|
| 15 |
+
- math
|
| 16 |
---
|
| 17 |
|
| 18 |
+
# Weight Systems Defining Five-Dimensional IP Lattice Polytopes
|
| 19 |
|
| 20 |
This dataset contains all weight systems defining five-dimensional reflexive and
|
| 21 |
+
non-reflexive IP lattice polytopes, instrumental in the study of Calabi-Yau fourfolds in
|
| 22 |
+
mathematics and theoretical physics. The data was compiled by Harald Skarke and Friedrich
|
| 23 |
+
Schöller in [arXiv:1808.02422](https://arxiv.org/abs/1808.02422). More information is
|
| 24 |
+
available at the [Calabi-Yau data website](http://hep.itp.tuwien.ac.at/~kreuzer/CY/). The
|
| 25 |
+
dataset can be explored using the [search
|
| 26 |
+
frontend](http://rgc.itp.tuwien.ac.at/fourfolds/). See below for a short mathematical
|
| 27 |
+
exposition on the construction of polytopes.
|
| 28 |
+
|
| 29 |
+
Please cite the paper when referencing this dataset:
|
| 30 |
+
|
| 31 |
+
```
|
| 32 |
+
@article{Scholler:2018apc,
|
| 33 |
+
author = {Schöller, Friedrich and Skarke, Harald},
|
| 34 |
+
title = "{All Weight Systems for Calabi-Yau Fourfolds from Reflexive Polyhedra}",
|
| 35 |
+
eprint = "1808.02422",
|
| 36 |
+
archivePrefix = "arXiv",
|
| 37 |
+
primaryClass = "hep-th",
|
| 38 |
+
doi = "10.1007/s00220-019-03331-9",
|
| 39 |
+
journal = "Commun. Math. Phys.",
|
| 40 |
+
volume = "372",
|
| 41 |
+
number = "2",
|
| 42 |
+
pages = "657--678",
|
| 43 |
+
year = "2019"
|
| 44 |
+
}
|
| 45 |
+
```
|
| 46 |
|
| 47 |
## Dataset Details
|
| 48 |
|
| 49 |
+
The dataset consists of two subsets: weight systems defining reflexive (and therefore IP)
|
| 50 |
+
polytopes and weight systems defining non-reflexive IP polytopes. Each subset is split
|
| 51 |
+
into 4000 files in Parquet format. Rows within each file are sorted lexicographically by
|
| 52 |
+
weights.
|
| 53 |
|
| 54 |
+
Each row in the dataset represents a polytope and contains the six weights defining it,
|
| 55 |
along with the vertex count, facet count, and lattice point count. The reflexive dataset
|
| 56 |
also includes the Hodge numbers \\( h^{1,1} \\), \\( h^{1,2} \\), and \\( h^{1,3} \\) of
|
| 57 |
+
the corresponding Calabi-Yau manifold, and the lattice point count of the dual polytope.
|
| 58 |
|
| 59 |
For any Calabi-Yau fourfold, the Euler characteristic \\( \chi \\) and the Hodge number
|
| 60 |
\\( h^{2,2} \\) can be derived as follows:
|
| 61 |
+
|
| 62 |
$$ \chi = 48 + 6 (h^{1,1} − h^{1,2} + h^{1,3}) $$
|
| 63 |
+
|
| 64 |
$$ h^{2,2} = 44 + 4 h^{1,1} − 2 h^{1,2} + 4 h^{1,3} $$
|
| 65 |
|
| 66 |
+
This dataset is licensed under the
|
| 67 |
+
[CC BY-SA 4.0 license](http://creativecommons.org/licenses/by-sa/4.0/).
|
| 68 |
|
| 69 |
### Data Fields
|
| 70 |
|
| 71 |
+
- `weight0` to `weight5`: Weights of the weight system defining the polytope.
|
| 72 |
+
- `vertex_count`: Vertex count of the polytope.
|
| 73 |
+
- `facet_count`: Facet count of the polytope.
|
| 74 |
+
- `point_count`: Lattice point count of the polytope.
|
| 75 |
+
- `dual_point_count`: Lattice point count of the dual polytope (only for reflexive
|
| 76 |
+
polytopes).
|
| 77 |
+
- `h11`: Hodge number \\( h^{1,1} \\) (only for reflexive polytopes).
|
| 78 |
+
- `h12`: Hodge number \\( h^{1,2} \\) (only for reflexive polytopes).
|
| 79 |
+
- `h13`: Hodge number \\( h^{1,3} \\) (only for reflexive polytopes).
|
| 80 |
|
| 81 |
## Usage
|
| 82 |
|
|
|
|
| 94 |
```
|
| 95 |
|
| 96 |
When cloning the Git repository with Git Large File Storage (LFS), data files are stored
|
| 97 |
+
both in the Git LFS storage directory and in the working tree. To avoid occupying double
|
| 98 |
+
the disk space, use a filesystem that supports copy-on-write, and run the following
|
| 99 |
commands to clone the repository:
|
| 100 |
|
| 101 |
```bash
|
|
|
|
| 119 |
git lfs dedup
|
| 120 |
```
|
| 121 |
|
| 122 |
+
## Construction of Polytopes
|
| 123 |
|
| 124 |
+
This is an introduction to the mathematics involved in the construction of polytopes
|
| 125 |
+
relevant to this dataset. For more details and precise definitions, consult the paper
|
| 126 |
+
[arXiv:1808.02422](https://arxiv.org/abs/1808.02422) and references therein.
|
| 127 |
|
| 128 |
+
### Polytopes
|
| 129 |
+
|
| 130 |
+
A polytope is the convex hull of a finite set of points in \\(n\\)-dimensional Euclidean
|
| 131 |
+
space, \\(\mathbb{R}^n\\). This means it is the smallest convex shape that contains all
|
| 132 |
+
these points. The minimal collection of points that define a particular polytope are its
|
| 133 |
+
vertices. Familiar examples of polytopes include triangles and rectangles in two
|
| 134 |
+
dimensions, and cubes and octahedra in three dimensions.
|
| 135 |
+
|
| 136 |
+
A polytope is considered an *IP polytope* (interior point polytope) if the origin of
|
| 137 |
+
\\(\mathbb{R}^n\\) is in the interior of the polytope, not on its boundary or outside it.
|
| 138 |
+
|
| 139 |
+
For any IP polytope \\(\nabla\\), its dual polytope \\(\nabla^*\\) is defined as the set
|
| 140 |
+
of points \\(\mathbf{y}\\) satisfying
|
| 141 |
+
|
| 142 |
+
$$
|
| 143 |
+
\mathbf{x} \cdot \mathbf{y}
|
| 144 |
+
\ge -1 \quad \text{for all } \mathbf{x} \in \nabla \;.
|
| 145 |
+
$$
|
| 146 |
+
|
| 147 |
+
This relationship is symmetric: the dual of the dual of a polytope is the polytope itself,
|
| 148 |
+
i.e., \\( \nabla^{**} = \nabla \\).
|
| 149 |
+
|
| 150 |
+
### Weight Systems
|
| 151 |
+
|
| 152 |
+
Weight systems provide a means to describe simple polytopes known as *simplexes*. More
|
| 153 |
+
broadly, *combined weight systems*, which are collections of individual weight systems,
|
| 154 |
+
can describe any polytope. A combined weight system is a matrix consisting of real
|
| 155 |
+
numbers. The construction process is outlined as follows:
|
| 156 |
+
|
| 157 |
+
Consider a polytope in \\(\mathbb{R}^n\\) with vertex count \\(k\\), where \\(k\\) is
|
| 158 |
+
bigger than \\(n\\). It is possible to position \\(n\\) of these vertices at arbitrary
|
| 159 |
+
(linearly independent) locations through a linear transformation. The placement of the
|
| 160 |
+
remaining \\(k - n\\) vertices is then determined. Their positions are the defining
|
| 161 |
+
properties of a polytope. To specify these positions independently of the applied linear
|
| 162 |
+
transformation, one can use the following system of equations. If \\(\mathbf{v}_0,
|
| 163 |
+
\mathbf{v}_1, \dots \mathbf{v}_{k-1}\\) are the vertices of the polytope, these relations
|
| 164 |
+
fix \\(k - n\\) vertices in terms of the other \\(n\\):
|
| 165 |
+
|
| 166 |
+
$$
|
| 167 |
+
\sum_{i=0}^{k-1} q_i^{(j)} \mathbf{v}_i
|
| 168 |
+
= 0 \quad \text{for } 0 \le j \le k - n - 1 \;,
|
| 169 |
+
$$
|
| 170 |
+
|
| 171 |
+
where \\(q_i^{(j)}\\) is the matrix of real numbers, the combined weight system. In cases
|
| 172 |
+
where \\(k = n + 1\\), \\(j\\) is limited to the value zero, reducing the matrix to a
|
| 173 |
+
single weight system \\(q_i\\). In this scenario, the polytope is a simplex, and the
|
| 174 |
+
equation simplifies to:
|
| 175 |
+
|
| 176 |
+
$$ \sum_{i=0}^n q_i \mathbf{v}_i = 0 \;. $$
|
| 177 |
+
|
| 178 |
+
It is important to note that scaling all weights in a weight system by a common factor
|
| 179 |
+
results in an equivalent weight system that defines the same polytope.
|
| 180 |
+
|
| 181 |
+
For this dataset, the focus is on a specific construction of lattice polytopes described
|
| 182 |
+
in subsequent sections.
|
| 183 |
+
|
| 184 |
+
### Lattice Polytopes
|
| 185 |
+
|
| 186 |
+
A lattice polytope is a polytope with vertices at the points of a regular grid, or
|
| 187 |
+
lattice. Using linear transformations, any lattice polytope can be transformed so that its
|
| 188 |
+
vertices have integer coordinates, hence they are also referred to as integral
|
| 189 |
+
polytopes.
|
| 190 |
+
|
| 191 |
+
The dual of a lattice with points \\(L\\) is the lattice consisting of all points
|
| 192 |
+
\\(\mathbf{y}\\) that satisfy
|
| 193 |
+
|
| 194 |
+
$$
|
| 195 |
+
\mathbf{x} \cdot \mathbf{y} \in \mathbb{Z} \quad \text{for all } \mathbf{x} \in L \;.
|
| 196 |
+
$$
|
| 197 |
+
|
| 198 |
+
*Reflexive polytopes* are a specific type of lattice polytope characterized by having a
|
| 199 |
+
dual that is also a lattice polytope, with vertices situated on the dual lattice. These
|
| 200 |
+
polytopes play a central role in the context of this dataset.
|
| 201 |
+
|
| 202 |
+
The weights of a lattice polytope are always rational. This characteristic enables the
|
| 203 |
+
rescaling of a weight system so that its weights become integers without any common
|
| 204 |
+
divisor. This rescaling has been performed in this dataset.
|
| 205 |
+
|
| 206 |
+
Typically, the dual of a lattice polytope defined by a weight system is not a lattice
|
| 207 |
+
polytope. However, our interest lies in a different construction than simply considering
|
| 208 |
+
polytopes defined by (combined) weight systems, as described above. In this construction,
|
| 209 |
+
they are just the starting point. We start with the polytope \\(\nabla\\), arising from a
|
| 210 |
+
weight system as previously described. Then, we define the polytope \\(\Delta\\) as the
|
| 211 |
+
convex hull of the intersection of \\(\nabla^*\\) with the points of the dual lattice. In
|
| 212 |
+
the context of this dataset, the polytope \\(\Delta\\) is referred to as ‘the polytope’.
|
| 213 |
+
Correspondingly, \\(\Delta^{\!*}\\) is referred to as ‘the dual polytope’. The lattice of
|
| 214 |
+
\\(\Delta\\) is taken to be the coarsest lattice possible, such that \\(\nabla\\) is a
|
| 215 |
+
lattice polytope, i.e., the lattice generated by the vertices of \\(\nabla\\). This
|
| 216 |
+
construction is exemplified in the following sections.
|
| 217 |
+
|
| 218 |
+
A weight system is considered an IP weight system if the corresponding \\(\Delta\\) is an
|
| 219 |
+
IP polytope; that is, the origin is within its interior. Since only IP polytopes have
|
| 220 |
+
corresponding dual polytopes, this condition is essential for the polytope \\(\Delta\\) to
|
| 221 |
+
be classified as reflexive.
|
| 222 |
+
|
| 223 |
+
### Two Dimensions
|
| 224 |
+
|
| 225 |
+
In two dimensions, all IP weight systems define reflexive polytopes and every vertex of
|
| 226 |
+
\\(\nabla^*\\) lies on the dual lattice, making \\(\Delta\\) and \\(\nabla^*\\) identical.
|
| 227 |
+
There are exactly three IP weight systems that define two-dimensional polytopes
|
| 228 |
+
(polygons). Each polytope is reflexive and has three vertices and three facets (edges):
|
| 229 |
+
|
| 230 |
+
| weight system | number of points of \\(\nabla\\) | number of points of \\(\nabla^*\\) |
|
| 231 |
+
|--------------:|---------------------------------:|-----------------------------------:|
|
| 232 |
+
| (1, 1, 1) | 4 | 10 |
|
| 233 |
+
| (1, 1, 2) | 5 | 9 |
|
| 234 |
+
| (1, 2, 3) | 7 | 7 |
|
| 235 |
+
|
| 236 |
+
We will now construct these polytopes from their corresponding weight system. Fixing the
|
| 237 |
+
first two vertices of the polytopes
|
| 238 |
+
|
| 239 |
+
$$
|
| 240 |
+
\mathbf{v}_0 = (1, 0) \quad \text{and} \quad
|
| 241 |
+
\mathbf{v}_1 = (0, 1) \;,
|
| 242 |
+
$$
|
| 243 |
+
|
| 244 |
+
one can obtain the position of the third vertex by solving the weight system equation from
|
| 245 |
+
before:
|
| 246 |
+
|
| 247 |
+
$$
|
| 248 |
+
\mathbf{v}_2 = - \frac{q_0 \mathbf{v}_0 + q_1 \mathbf{v}_1}{q_2} \;.
|
| 249 |
+
$$
|
| 250 |
+
|
| 251 |
+
The resulting polytopes and their duals are depicted below. Lattice points are indicated
|
| 252 |
+
by dots.
|
| 253 |
+
<img src="pictures/ws-2d.png" style="display: block; margin-left: auto; margin-right: auto; width:520px;">
|
| 254 |
+
|
| 255 |
+
One may notice that a simpler description could be obtained by fixing \\(\mathbf{v}_2 =
|
| 256 |
+
(1, 0)\\) instead of \\(\mathbf{v}_0\\), which would avoid fractional vertex coordinates.
|
| 257 |
+
However, this approach would not illustrate the general case in higher dimensions, where
|
| 258 |
+
this is not possible since there is not always a weight equal to 1.
|
| 259 |
+
|
| 260 |
+
### General Dimension
|
| 261 |
+
|
| 262 |
+
In higher dimensions, the situation becomes more complex. Not all IP polytopes are
|
| 263 |
+
reflexive, and generally, \\(\Delta \neq \nabla^*\\).
|
| 264 |
+
|
| 265 |
+
This example shows the construction of the three-dimensional polytope \\(\Delta\\) with
|
| 266 |
+
weight system (2, 3, 4, 5) and its dual \\(\Delta^{\!*}\\). Lattice points lying on the
|
| 267 |
+
polytopes are indicated by dots. \\(\Delta\\) has 7 vertices and 13 lattice points,
|
| 268 |
+
\\(\Delta^{\!*}\\) also has 7 vertices, but 16 lattice points.
|
| 269 |
+
<img src="pictures/ws-3d-2-3-4-5.png" style="display: block; margin-left: auto; margin-right: auto; width:450px;">
|
| 270 |
+
|
| 271 |
+
The counts of reflexive single-weight-system polytopes by dimension \\(n\\) are:
|
| 272 |
+
|
| 273 |
+
| \\(n\\) | reflexive single-weight-system polytopes |
|
| 274 |
+
|--------:|-----------------------------------------:|
|
| 275 |
+
| 2 | 3 |
|
| 276 |
+
| 3 | 95 |
|
| 277 |
+
| 4 | 184,026 |
|
| 278 |
+
| 5 | (this dataset) 185,269,499,015 |
|
pictures/Makefile
ADDED
|
@@ -0,0 +1,21 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
SOURCES = $(wildcard *.tex)
|
| 2 |
+
PNGS = $(SOURCES:.tex=.png)
|
| 3 |
+
PDFS = $(SOURCES:.tex=.pdf)
|
| 4 |
+
|
| 5 |
+
png: $(PNGS)
|
| 6 |
+
pdf: $(PDFS)
|
| 7 |
+
|
| 8 |
+
%.pdf: %.tex
|
| 9 |
+
pdflatex $<
|
| 10 |
+
rm $(<:.tex=.aux) $(<:.tex=.log)
|
| 11 |
+
|
| 12 |
+
%.png: %.pdf
|
| 13 |
+
convert -density 600 $< -flatten $@
|
| 14 |
+
|
| 15 |
+
.PHONY: clean
|
| 16 |
+
clean:
|
| 17 |
+
rm -rf auto *.aux *.log *.synctex.gz
|
| 18 |
+
|
| 19 |
+
.PHONY: cleanall
|
| 20 |
+
cleanall: clean
|
| 21 |
+
rm -rf *.png *.pdf
|
pictures/ws-2d.png
ADDED

|
Git LFS Details
|
pictures/ws-2d.tex
ADDED
|
@@ -0,0 +1,132 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
\documentclass[tikz,11pt]{standalone}
|
| 2 |
+
|
| 3 |
+
\usepackage{tikz}
|
| 4 |
+
|
| 5 |
+
\pgfmathsetmacro{\gridLineWidth}{0.6pt}
|
| 6 |
+
\pgfmathsetmacro{\polytopeLineWidth}{1.2pt}
|
| 7 |
+
\pgfmathsetmacro{\dotSize}{0.5mm}
|
| 8 |
+
\definecolor{fillColor}{rgb}{0.8,0.8,0.8}
|
| 9 |
+
\pgfmathsetmacro{\opacity}{0.7}
|
| 10 |
+
|
| 11 |
+
\begin{document}
|
| 12 |
+
\begin{tikzpicture}
|
| 13 |
+
% (1, 1, 1)
|
| 14 |
+
\begin{scope}[yshift=5.2cm, scale=0.7]
|
| 15 |
+
\node at (-5, 0) {$\mathbf{q} = (1, 1, 1)$};
|
| 16 |
+
|
| 17 |
+
\begin{scope}
|
| 18 |
+
\node at (0, -3.3) {$\nabla = \Delta^{\!*}$};
|
| 19 |
+
|
| 20 |
+
\clip (0,0) circle (2.7);
|
| 21 |
+
|
| 22 |
+
\path [draw, fill opacity=\opacity, fill=fillColor, line width=\polytopeLineWidth] (1, 0) --(0, 1) --(-1, -1) --cycle;
|
| 23 |
+
|
| 24 |
+
\draw[step=1, dotted, line width=\gridLineWidth] (-10, -10) grid (10, 10);
|
| 25 |
+
\path [draw, line width=\gridLineWidth] (-10, 0) --(10, 0) (0, -10) --(0, 10);
|
| 26 |
+
|
| 27 |
+
\foreach \i in {-2,...,2}
|
| 28 |
+
\foreach \j in {-2,...,2}{
|
| 29 |
+
\node at (\i, \j) [circle, fill, inner sep=\dotSize] {};
|
| 30 |
+
};
|
| 31 |
+
\end{scope}
|
| 32 |
+
|
| 33 |
+
\begin{scope}[xshift=6.5cm]
|
| 34 |
+
\node at (0, -3.3) {$\nabla^* = \Delta$};
|
| 35 |
+
|
| 36 |
+
\clip (0,0) circle (2.7);
|
| 37 |
+
\begin{scope}
|
| 38 |
+
\path [draw, fill opacity=\opacity, fill=fillColor, line width=\polytopeLineWidth] (-1, 2) --(2, -1) --(-1, -1) --cycle;
|
| 39 |
+
|
| 40 |
+
\draw[step=1, dotted, line width=\gridLineWidth] (-10, -10) grid (10, 10);
|
| 41 |
+
\path [draw, line width=\gridLineWidth] (-10, 0) --(10, 0) (0, -10) --(0, 10);
|
| 42 |
+
|
| 43 |
+
\foreach \i in {-2,...,2}
|
| 44 |
+
\foreach \j in {-2,...,2}{
|
| 45 |
+
\node at (\i, \j) [circle, fill, inner sep=\dotSize] {};
|
| 46 |
+
};
|
| 47 |
+
\end{scope}
|
| 48 |
+
\end{scope}
|
| 49 |
+
\end{scope}
|
| 50 |
+
|
| 51 |
+
% (1, 1, 2)
|
| 52 |
+
\begin{scope}[yshift=0cm, scale=0.7]
|
| 53 |
+
\node at (-5, 0) {$\mathbf{q} = (1, 1, 2)$};
|
| 54 |
+
|
| 55 |
+
\begin{scope}
|
| 56 |
+
\node at (0, -3.3) {$\nabla = \Delta^{\!*}$};
|
| 57 |
+
|
| 58 |
+
\clip (0,0) circle (2.7);
|
| 59 |
+
\begin{scope}[scale=1.4142] % sqrt(2)
|
| 60 |
+
\path [draw, fill opacity=\opacity, fill=fillColor, line width=\polytopeLineWidth] (1, 0) --(0, 1) --(-1/2, -1/2) --cycle;
|
| 61 |
+
|
| 62 |
+
\draw[step=1, dotted, line width=\gridLineWidth] (-10, -10) grid (10, 10);
|
| 63 |
+
\path [draw, line width=\gridLineWidth] (-10, 0) --(10, 0) (0, -10) --(0, 10);
|
| 64 |
+
|
| 65 |
+
\foreach \i in {-2,...,2}
|
| 66 |
+
\foreach \j in {-2,...,2}{
|
| 67 |
+
\node at (\i / 2 - \j / 2, \i / 2 + \j / 2) [circle, fill, inner sep=\dotSize] {};
|
| 68 |
+
};
|
| 69 |
+
\end{scope}
|
| 70 |
+
\end{scope}
|
| 71 |
+
|
| 72 |
+
\begin{scope}[xshift=6.5cm]
|
| 73 |
+
\node at (0, -3.3) {$\nabla^* = \Delta$};
|
| 74 |
+
|
| 75 |
+
\clip (0,0) circle (2.7);
|
| 76 |
+
\begin{scope}[scale=0.707]
|
| 77 |
+
\path [draw, fill opacity=\opacity, fill=fillColor, line width=\polytopeLineWidth] (-1, 3) --(3, -1) --(-1, -1) --cycle;
|
| 78 |
+
|
| 79 |
+
\draw[step=1, dotted, line width=\gridLineWidth] (-10, -10) grid (10, 10);
|
| 80 |
+
\path [draw, line width=\gridLineWidth] (-10, 0) --(10, 0) (0, -10) --(0, 10);
|
| 81 |
+
|
| 82 |
+
\foreach \i in {-2,...,2}
|
| 83 |
+
\foreach \j in {-2,...,2}{
|
| 84 |
+
\node at (\i - \j, \i + \j) [circle, fill, inner sep=\dotSize] {};
|
| 85 |
+
};
|
| 86 |
+
\end{scope}
|
| 87 |
+
\end{scope}
|
| 88 |
+
\end{scope}
|
| 89 |
+
|
| 90 |
+
% (1, 2, 3)
|
| 91 |
+
\begin{scope}[yshift=-5.2cm, scale=0.7]
|
| 92 |
+
\node at (-5, 0) {$\mathbf{q} = (1, 2, 3)$};
|
| 93 |
+
|
| 94 |
+
\begin{scope}
|
| 95 |
+
\node at (0, -3.3) {$\nabla = \Delta^{\!*}$};
|
| 96 |
+
|
| 97 |
+
\clip (0,0) circle (2.7);
|
| 98 |
+
\begin{scope}[scale=1.732] % sqrt(3)
|
| 99 |
+
\path [draw, fill opacity=\opacity, fill=fillColor, line width=\polytopeLineWidth] (1, 0) --(0, 1) --(-1/3, -2/3) --cycle;
|
| 100 |
+
|
| 101 |
+
\draw[step=1, dotted, line width=\gridLineWidth] (-10, -10) grid (10, 10);
|
| 102 |
+
\path [draw, line width=\gridLineWidth] (-10, 0) --(10, 0) (0, -10) --(0, 10);
|
| 103 |
+
|
| 104 |
+
\foreach \i in {-2,...,2}
|
| 105 |
+
\foreach \j in {-4,...,4}{
|
| 106 |
+
\node at (\i / 3 - \j / 3, \i * 2 / 3 + \j / 3) [circle, fill, inner sep=\dotSize] {};
|
| 107 |
+
};
|
| 108 |
+
\end{scope}
|
| 109 |
+
\end{scope}
|
| 110 |
+
|
| 111 |
+
\begin{scope}[xshift=6.5cm]
|
| 112 |
+
\node at (0, -3.3) {$\nabla^* = \Delta$};
|
| 113 |
+
|
| 114 |
+
\clip (0,0) circle (2.7);
|
| 115 |
+
\begin{scope}[scale=0.577]
|
| 116 |
+
\begin{scope}[xshift=-2cm]
|
| 117 |
+
\path [draw, fill opacity=\opacity, fill=fillColor, line width=\polytopeLineWidth] (5, -1) --(-1, 2) --(-1, -1) --cycle;
|
| 118 |
+
|
| 119 |
+
\draw[step=1, dotted, line width=\gridLineWidth] (-10, -10) grid (10, 10);
|
| 120 |
+
\path [draw, line width=\gridLineWidth] (-10, 0) --(10, 0) (0, -10) --(0, 10);
|
| 121 |
+
|
| 122 |
+
\foreach \i in {-1,...,3}
|
| 123 |
+
\foreach \j in {-4,...,4}{
|
| 124 |
+
\node at (3 * \i + \j, \j) [circle, fill, inner sep=\dotSize] {};
|
| 125 |
+
};
|
| 126 |
+
\end{scope}
|
| 127 |
+
\end{scope}
|
| 128 |
+
\end{scope}
|
| 129 |
+
\end{scope}
|
| 130 |
+
|
| 131 |
+
\end{tikzpicture}
|
| 132 |
+
\end{document}
|
pictures/ws-3d-2-3-4-5.png
ADDED

|
Git LFS Details
|
pictures/ws-3d-2-3-4-5.tex
ADDED
|
@@ -0,0 +1,266 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
\documentclass[tikz,11pt]{standalone}
|
| 2 |
+
|
| 3 |
+
\usepackage{tikz}
|
| 4 |
+
\usepackage{tikz-3dplot}
|
| 5 |
+
|
| 6 |
+
\usetikzlibrary{arrows.meta}
|
| 7 |
+
|
| 8 |
+
\pgfmathsetmacro{\polytopeLineWidth}{1.2pt}
|
| 9 |
+
\pgfmathsetmacro{\dotSize}{0.5mm}
|
| 10 |
+
\definecolor{fillColor}{rgb}{0.8,0.8,0.8}
|
| 11 |
+
\pgfmathsetmacro{\opacity}{0.7}
|
| 12 |
+
\pgfmathsetmacro{\rotation}{72}
|
| 13 |
+
\pgfmathsetmacro{\zRotation}{30}
|
| 14 |
+
% \pgfmathsetmacro{\rotation}{100}
|
| 15 |
+
% \pgfmathsetmacro{\zRotation}{30}
|
| 16 |
+
|
| 17 |
+
\newcommand{\point}[1]{
|
| 18 |
+
\path (#1) node[fill, black, circle, inner sep=\dotSize] {};
|
| 19 |
+
}
|
| 20 |
+
|
| 21 |
+
\begin{document}
|
| 22 |
+
|
| 23 |
+
\begin{tikzpicture}[line join=bevel, line width=\polytopeLineWidth, scale=1.1]
|
| 24 |
+
\begin{scope}
|
| 25 |
+
\path [draw, -Stealth] (1.7, 2.4) -- node [above] {dual} (3.7, 2.4);
|
| 26 |
+
\path [draw, -Stealth] (5, -0.5) -- node [right] {convex hull} (5, -1.5);
|
| 27 |
+
|
| 28 |
+
\node at (0, 0) {$\nabla$};
|
| 29 |
+
|
| 30 |
+
\tdplotsetmaincoords{\rotation}{-\zRotation}
|
| 31 |
+
\tdplotsetrotatedcoords{0}{90}{90}
|
| 32 |
+
|
| 33 |
+
% \begin{tikzpicture}[tdplot_main_coords]
|
| 34 |
+
% \draw[thick,->] (0,0,0) -- (1,0,0) node[anchor=north east]{$x$};
|
| 35 |
+
% \draw[thick,->] (0,0,0) -- (0,1,0) node[anchor=north west]{$y$};
|
| 36 |
+
% \draw[thick,->] (0,0,0) -- (0,0,1) node[anchor=south]{$z$};
|
| 37 |
+
% \end{tikzpicture}
|
| 38 |
+
|
| 39 |
+
\begin{scope}[tdplot_rotated_coords, xshift=0.2cm, yshift=3.4cm]
|
| 40 |
+
% back faces
|
| 41 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (2.,0.,-1.)--(0.,0.,1.)--(-3.,-2.,-1.)--cycle;
|
| 42 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,1.,0.)--(0.,0.,1.)--(2.,0.,-1.)--cycle;
|
| 43 |
+
|
| 44 |
+
% back points
|
| 45 |
+
\point{1,0,0};
|
| 46 |
+
\point{0.,0.,0.}; % inside
|
| 47 |
+
|
| 48 |
+
% front faces
|
| 49 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,1.,0.)--(2.,0.,-1.)--(-3.,-2.,-1.)--cycle;
|
| 50 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,0.,1.)--(0.,1.,0.)--(-3.,-2.,-1.)--cycle;
|
| 51 |
+
|
| 52 |
+
% front points
|
| 53 |
+
\point{2.,0.,-1.};
|
| 54 |
+
\point{0.,1.,0.};
|
| 55 |
+
\point{0.,0.,1.};
|
| 56 |
+
\point{-3.,-2.,-1.};
|
| 57 |
+
\end{scope}
|
| 58 |
+
\end{scope}
|
| 59 |
+
|
| 60 |
+
% \begin{scope}
|
| 61 |
+
% \path [draw, -Stealth] (1.7, 2.4) --(3.7, 2.4);
|
| 62 |
+
% \path [draw, -Stealth] (5, -0.5) --(5, -1.5);
|
| 63 |
+
|
| 64 |
+
% \node at (0, 0) {$\nabla$};
|
| 65 |
+
|
| 66 |
+
% \tdplotsetmaincoords{\rotation}{180 - \zRotation}
|
| 67 |
+
% \tdplotsetrotatedcoords{0}{90}{90}
|
| 68 |
+
|
| 69 |
+
% \begin{scope}[tdplot_rotated_coords, xshift=0.2cm, yshift=3.4cm]
|
| 70 |
+
% % \begin{scope}[tdplot_rotated_coords]
|
| 71 |
+
% % \draw[thick,->] (0,0,0) -- (1,0,0) node[anchor=north east]{$x$};
|
| 72 |
+
% % \draw[thick,->] (0,0,0) -- (0,1,0) node[anchor=north west]{$y$};
|
| 73 |
+
% % \draw[thick,->] (0,0,0) -- (0,0,1) node[anchor=south]{$z$};
|
| 74 |
+
% % \end{scope}
|
| 75 |
+
|
| 76 |
+
% % back faces
|
| 77 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (0.,1.,0.)--(2.,0.,-1.)--(-3.,-2.,-1.)--cycle;
|
| 78 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (0.,0.,1.)--(0.,1.,0.)--(-3.,-2.,-1.)--cycle;
|
| 79 |
+
|
| 80 |
+
% % back points
|
| 81 |
+
% \point{2.,0.,-1.};
|
| 82 |
+
% \point{0.,1.,0.};
|
| 83 |
+
% \point{0.,0.,1.};
|
| 84 |
+
% \point{-3.,-2.,-1.};
|
| 85 |
+
% \point{0.,0.,0.}; % inside
|
| 86 |
+
|
| 87 |
+
% % front faces
|
| 88 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (2.,0.,-1.)--(0.,0.,1.)--(-3.,-2.,-1.)--cycle;
|
| 89 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (0.,1.,0.)--(0.,0.,1.)--(2.,0.,-1.)--cycle;
|
| 90 |
+
|
| 91 |
+
% % front points
|
| 92 |
+
% \point{1,0,0};
|
| 93 |
+
% \end{scope}
|
| 94 |
+
% \end{scope}
|
| 95 |
+
|
| 96 |
+
\begin{scope}[xshift=5cm]
|
| 97 |
+
\node at (0, 0) {$\nabla^*$};
|
| 98 |
+
|
| 99 |
+
\tdplotsetmaincoords{\rotation}{180 - \zRotation}
|
| 100 |
+
\tdplotsetrotatedcoords{0}{90}{90}
|
| 101 |
+
\begin{scope}[tdplot_rotated_coords, yshift=1.8cm]
|
| 102 |
+
% back faces
|
| 103 |
+
\path [draw, fill opacity=0.7, fill=fillColor] (1.333,-1.,-1.)--(-1.,-1.,-1.)--(-1.,2.5,-1.)--cycle;
|
| 104 |
+
\path [draw, fill opacity=0.7, fill=fillColor] (-1.,-1.,-1.)--(0.4,-1.,1.8)--(-1.,2.5,-1.)--cycle;
|
| 105 |
+
\path [draw, fill opacity=0.7, fill=fillColor] (0.4,-1.,1.8)--(-1.,-1.,-1.)--(1.333,-1.,-1.)--cycle;
|
| 106 |
+
|
| 107 |
+
% back points
|
| 108 |
+
\point{-1.,-1.,-1.};
|
| 109 |
+
\point{0.,-1.,-1.};
|
| 110 |
+
\point{1.,-1.,-1.};
|
| 111 |
+
\point{-1.,0.,-1.};
|
| 112 |
+
\point{-1.,1.,-1.};
|
| 113 |
+
\point{-1.,2.,-1.};
|
| 114 |
+
\point{0.,-1.,1.};
|
| 115 |
+
\point{0.,0.,-1.}; % on face
|
| 116 |
+
\point{0.,-1.,0.}; % on face
|
| 117 |
+
\point{0.,0.,0.}; % inside
|
| 118 |
+
|
| 119 |
+
% front faces
|
| 120 |
+
\path [draw, fill opacity=0.7, fill=fillColor] (0.4,-1.,1.8)--(1.333,-1.,-1.)--(-1.,2.5,-1.)--cycle;
|
| 121 |
+
|
| 122 |
+
% front points
|
| 123 |
+
\point{0.,1.,-1.};
|
| 124 |
+
\point{0.,0.,1.};
|
| 125 |
+
\point{1.,-1.,0.};
|
| 126 |
+
\end{scope}
|
| 127 |
+
\end{scope}
|
| 128 |
+
|
| 129 |
+
\begin{scope}[xshift=5cm, yshift=-6.5cm]
|
| 130 |
+
\node at (0, 0) {$\Delta$};
|
| 131 |
+
|
| 132 |
+
\tdplotsetmaincoords{\rotation}{180 - \zRotation}
|
| 133 |
+
\tdplotsetrotatedcoords{0}{90}{90}
|
| 134 |
+
\begin{scope}[tdplot_rotated_coords, xshift=-0.2cm, yshift=1.8cm]
|
| 135 |
+
% back edges
|
| 136 |
+
\path [draw, densely dotted] (0.4,-1.,1.8)--(1.333,-1.,-1.);
|
| 137 |
+
\path [draw, densely dotted] (1.333,-1.,-1.)--(-1.,2.5,-1.);
|
| 138 |
+
\path [draw, densely dotted] (-1.,2.5,-1.)--(0.4,-1.,1.8);
|
| 139 |
+
\path [draw, densely dotted] (1.333,-1.,-1.)--(-1.,-1.,-1.);
|
| 140 |
+
\path [draw, densely dotted] (-1.,-1.,-1.)--(-1.,2.5,-1.);
|
| 141 |
+
\path [draw, densely dotted] (-1.,-1.,-1.)--(0.4,-1.,1.8);
|
| 142 |
+
|
| 143 |
+
% back faces
|
| 144 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (-1.,-1.,-1.)--(0.,-1.,1.)--(0.,0.,1.)--(-1.,2.,-1.)--cycle;
|
| 145 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (-1.,-1.,-1.)--(-1.,2.,-1.)--(0.,1.,-1.)--(1.,-1.,-1.)--cycle;
|
| 146 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,-1.,1.)--(-1.,-1.,-1.)--(1.,-1.,-1.)--(1.,-1.,0.)--cycle;
|
| 147 |
+
|
| 148 |
+
% back points
|
| 149 |
+
\point{-1.,-1.,-1.};
|
| 150 |
+
\point{-1.,0.,-1.};
|
| 151 |
+
\point{-1.,1.,-1.};
|
| 152 |
+
\point{0.,-1.,-1.};
|
| 153 |
+
\point{0.,-1.,0.}; % on face
|
| 154 |
+
\point{0.,0.,-1.}; % on face
|
| 155 |
+
\point{0.,0.,0.}; % inside
|
| 156 |
+
|
| 157 |
+
% front faces
|
| 158 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,0.,1.)--(0.,1.,-1.)--(-1.,2.,-1.)--cycle;
|
| 159 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,1.,-1.)--(1.,-1.,0.)--(1.,-1.,-1.)--cycle;
|
| 160 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (1.,-1.,0.)--(0.,1.,-1.)--(0.,0.,1.)--cycle;
|
| 161 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (1.,-1.,0.)--(0.,0.,1.)--(0.,-1.,1.)--cycle;
|
| 162 |
+
|
| 163 |
+
% front points
|
| 164 |
+
\point{1.,-1.,-1.};
|
| 165 |
+
\point{1.,-1.,0.};
|
| 166 |
+
\point{0.,1.,-1.};
|
| 167 |
+
\point{0.,-1.,1.};
|
| 168 |
+
\point{0.,0.,1.};
|
| 169 |
+
\point{-1.,2.,-1.};
|
| 170 |
+
\end{scope}
|
| 171 |
+
\end{scope}
|
| 172 |
+
|
| 173 |
+
\begin{scope}[yshift=-6.5cm]
|
| 174 |
+
\path [draw, -Stealth] (3.7, 2.7) -- node [above] {dual} (1.7, 2.7);
|
| 175 |
+
|
| 176 |
+
\node at (0, 0) {$\Delta^{\!*}$};
|
| 177 |
+
|
| 178 |
+
\tdplotsetmaincoords{\rotation}{-\zRotation}
|
| 179 |
+
\tdplotsetrotatedcoords{0}{90}{90}
|
| 180 |
+
\begin{scope}[tdplot_rotated_coords, xshift=0.2cm, yshift=3.4cm]
|
| 181 |
+
% back edges
|
| 182 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,0.,1.)--(-2.,-2.,-1.)--(2.,0.,-1.) --cycle;
|
| 183 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (-3.,-2.,-1.)--(-2.,-2.,-1.)--(0.,0.,1.)--(-2.,-1.,0.) --cycle;
|
| 184 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (0.,1.,0.)--(0.,0.,1.)--(2.,0.,-1.) --cycle;
|
| 185 |
+
|
| 186 |
+
% back faces
|
| 187 |
+
\path [draw, densely dotted] (2.,0.,-1.)--(-3.,-2.,-1.);
|
| 188 |
+
\path [draw, densely dotted] (-3.,-2.,-1.)--(0.,1.,0.);
|
| 189 |
+
\path [draw, densely dotted] (0.,0.,1.)--(-3.,-2.,-1.);
|
| 190 |
+
|
| 191 |
+
% back points
|
| 192 |
+
\point{-1.,-1.,0.};
|
| 193 |
+
\point{1.,0.,0.};
|
| 194 |
+
\point{0.,0.,0.}; % inside
|
| 195 |
+
|
| 196 |
+
% front faces
|
| 197 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (-1.,0.,-1.)--(-3.,-2.,-1.)--(-2.,-1.,0.)--(0.,1.,0.) --cycle;
|
| 198 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (-1.,0.,-1.)--(0.,1.,0.)--(2.,0.,-1.) --cycle;
|
| 199 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (-1.,0.,-1.)--(2.,0.,-1.)--(-2.,-2.,-1.)--(-3.,-2.,-1.) --cycle;
|
| 200 |
+
\path [draw, fill opacity=\opacity, fill=fillColor] (-2.,-1.,0.)--(0.,0.,1.)--(0.,1.,0.) --cycle;
|
| 201 |
+
|
| 202 |
+
% front points
|
| 203 |
+
\point{-3.,-2.,-1.};
|
| 204 |
+
\point{-2.,-2.,-1.};
|
| 205 |
+
\point{-2.,-1.,-1.};
|
| 206 |
+
\point{-2.,-1.,0.};
|
| 207 |
+
\point{-1.,0.,-1.};
|
| 208 |
+
\point{-1.,0.,0.};
|
| 209 |
+
\point{0.,-1.,-1.};
|
| 210 |
+
\point{0.,0.,-1.};
|
| 211 |
+
\point{0.,0.,1.};
|
| 212 |
+
\point{0.,1.,0.};
|
| 213 |
+
\point{1.,0.,-1.};
|
| 214 |
+
\point{2.,0.,-1.};
|
| 215 |
+
\point{-1.,-1.,-1.}; % on face
|
| 216 |
+
\end{scope}
|
| 217 |
+
\end{scope}
|
| 218 |
+
|
| 219 |
+
% \begin{scope}[yshift=-6.5cm]
|
| 220 |
+
% \path [draw, -Stealth] (3.7, 2.7) --(1.7, 2.7);
|
| 221 |
+
|
| 222 |
+
% \node at (0, 0) {$\Delta^{\!*}$};
|
| 223 |
+
|
| 224 |
+
% \tdplotsetmaincoords{\rotation}{180 - \zRotation}
|
| 225 |
+
% \tdplotsetrotatedcoords{0}{90}{90}
|
| 226 |
+
% \begin{scope}[tdplot_rotated_coords, xshift=0.2cm, yshift=3.4cm]
|
| 227 |
+
% % back faces
|
| 228 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (-1.,0.,-1.)--(-3.,-2.,-1.)--(-2.,-1.,0.)--(0.,1.,0.) --cycle;
|
| 229 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (-1.,0.,-1.)--(0.,1.,0.)--(2.,0.,-1.) --cycle;
|
| 230 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (-1.,0.,-1.)--(2.,0.,-1.)--(-2.,-2.,-1.)--(-3.,-2.,-1.) --cycle;
|
| 231 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (-2.,-1.,0.)--(0.,0.,1.)--(0.,1.,0.) --cycle;
|
| 232 |
+
|
| 233 |
+
% % back points
|
| 234 |
+
% \point{-3.,-2.,-1.};
|
| 235 |
+
% \point{-2.,-2.,-1.};
|
| 236 |
+
% \point{-2.,-1.,-1.};
|
| 237 |
+
% \point{-2.,-1.,0.};
|
| 238 |
+
% \point{-1.,0.,-1.};
|
| 239 |
+
% \point{-1.,0.,0.};
|
| 240 |
+
% \point{0.,-1.,-1.};
|
| 241 |
+
% \point{0.,0.,-1.};
|
| 242 |
+
% \point{0.,0.,1.};
|
| 243 |
+
% \point{0.,1.,0.};
|
| 244 |
+
% \point{1.,0.,-1.};
|
| 245 |
+
% \point{2.,0.,-1.};
|
| 246 |
+
% \point{-1.,-1.,-1.}; % on face
|
| 247 |
+
% \point{0.,0.,0.}; % inside
|
| 248 |
+
|
| 249 |
+
% % front edges
|
| 250 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (0.,0.,1.)--(-2.,-2.,-1.)--(2.,0.,-1.) --cycle;
|
| 251 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (-3.,-2.,-1.)--(-2.,-2.,-1.)--(0.,0.,1.)--(-2.,-1.,0.) --cycle;
|
| 252 |
+
% \path [draw, fill opacity=\opacity, fill=fillColor] (0.,1.,0.)--(0.,0.,1.)--(2.,0.,-1.) --cycle;
|
| 253 |
+
|
| 254 |
+
% % front faces
|
| 255 |
+
% \path [draw, densely dotted] (2.,0.,-1.)--(-3.,-2.,-1.);
|
| 256 |
+
% \path [draw, densely dotted] (-3.,-2.,-1.)--(0.,1.,0.);
|
| 257 |
+
% \path [draw, densely dotted] (0.,0.,1.)--(-3.,-2.,-1.);
|
| 258 |
+
|
| 259 |
+
% % front points
|
| 260 |
+
% \point{-1.,-1.,0.};
|
| 261 |
+
% \point{1.,0.,0.};
|
| 262 |
+
% \end{scope}
|
| 263 |
+
% \end{scope}
|
| 264 |
+
\end{tikzpicture}
|
| 265 |
+
|
| 266 |
+
\end{document}
|