
repo_id
stringlengths 15
86
| file_path
stringlengths 28
180
| content
stringlengths 1
1.75M
| __index_level_0__
int64 0
0
|
|---|---|---|---|
hf_public_repos
|
hf_public_repos/accelerate/README.md
|
<!---
Copyright 2021 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
<p align="center">
<br>
<img src="https://raw.githubusercontent.com/huggingface/accelerate/main/docs/source/imgs/accelerate_logo.png" width="400"/>
<br>
<p>
<p align="center">
<!-- Uncomment when CircleCI is set up
<a href="https://circleci.com/gh/huggingface/accelerate">
<img alt="Build" src="https://img.shields.io/circleci/build/github/huggingface/transformers/master">
</a>
-->
<a href="https://github.com/huggingface/accelerate/blob/main/LICENSE">
<img alt="License" src="https://img.shields.io/github/license/huggingface/accelerate.svg?color=blue">
</a>
<a href="https://huggingface.co/docs/accelerate/index.html">
<img alt="Documentation" src="https://img.shields.io/website/http/huggingface.co/docs/accelerate/index.html.svg?down_color=red&down_message=offline&up_message=online">
</a>
<a href="https://github.com/huggingface/accelerate/releases">
<img alt="GitHub release" src="https://img.shields.io/github/release/huggingface/accelerate.svg">
</a>
<a href="https://github.com/huggingface/accelerate/blob/main/CODE_OF_CONDUCT.md">
<img alt="Contributor Covenant" src="https://img.shields.io/badge/Contributor%20Covenant-v2.0%20adopted-ff69b4.svg">
</a>
</p>
<h3 align="center">
<p>Run your *raw* PyTorch training script on any kind of device
</h3>
<h3 align="center">
<a href="https://hf.co/course"><img src="https://raw.githubusercontent.com/huggingface/accelerate/main/docs/source/imgs/course_banner.png"></a>
</h3>
## Easy to integrate
🤗 Accelerate was created for PyTorch users who like to write the training loop of PyTorch models but are reluctant to write and maintain the boilerplate code needed to use multi-GPUs/TPU/fp16.
🤗 Accelerate abstracts exactly and only the boilerplate code related to multi-GPUs/TPU/fp16 and leaves the rest of your code unchanged.
Here is an example:
```diff
import torch
import torch.nn.functional as F
from datasets import load_dataset
+ from accelerate import Accelerator
+ accelerator = Accelerator()
- device = 'cpu'
+ device = accelerator.device
model = torch.nn.Transformer().to(device)
optimizer = torch.optim.Adam(model.parameters())
dataset = load_dataset('my_dataset')
data = torch.utils.data.DataLoader(dataset, shuffle=True)
+ model, optimizer, data = accelerator.prepare(model, optimizer, data)
model.train()
for epoch in range(10):
for source, targets in data:
source = source.to(device)
targets = targets.to(device)
optimizer.zero_grad()
output = model(source)
loss = F.cross_entropy(output, targets)
- loss.backward()
+ accelerator.backward(loss)
optimizer.step()
```
As you can see in this example, by adding 5-lines to any standard PyTorch training script you can now run on any kind of single or distributed node setting (single CPU, single GPU, multi-GPUs and TPUs) as well as with or without mixed precision (fp8, fp16, bf16).
In particular, the same code can then be run without modification on your local machine for debugging or your training environment.
🤗 Accelerate even handles the device placement for you (which requires a few more changes to your code, but is safer in general), so you can even simplify your training loop further:
```diff
import torch
import torch.nn.functional as F
from datasets import load_dataset
+ from accelerate import Accelerator
- device = 'cpu'
+ accelerator = Accelerator()
- model = torch.nn.Transformer().to(device)
+ model = torch.nn.Transformer()
optimizer = torch.optim.Adam(model.parameters())
dataset = load_dataset('my_dataset')
data = torch.utils.data.DataLoader(dataset, shuffle=True)
+ model, optimizer, data = accelerator.prepare(model, optimizer, data)
model.train()
for epoch in range(10):
for source, targets in data:
- source = source.to(device)
- targets = targets.to(device)
optimizer.zero_grad()
output = model(source)
loss = F.cross_entropy(output, targets)
- loss.backward()
+ accelerator.backward(loss)
optimizer.step()
```
Want to learn more? Check out the [documentation](https://huggingface.co/docs/accelerate) or have a look at our [examples](https://github.com/huggingface/accelerate/tree/main/examples).
## Launching script
🤗 Accelerate also provides an optional CLI tool that allows you to quickly configure and test your training environment before launching the scripts. No need to remember how to use `torch.distributed.run` or to write a specific launcher for TPU training!
On your machine(s) just run:
```bash
accelerate config
```
and answer the questions asked. This will generate a config file that will be used automatically to properly set the default options when doing
```bash
accelerate launch my_script.py --args_to_my_script
```
For instance, here is how you would run the GLUE example on the MRPC task (from the root of the repo):
```bash
accelerate launch examples/nlp_example.py
```
This CLI tool is **optional**, and you can still use `python my_script.py` or `python -m torchrun my_script.py` at your convenience.
You can also directly pass in the arguments you would to `torchrun` as arguments to `accelerate launch` if you wish to not run` accelerate config`.
For example, here is how to launch on two GPUs:
```bash
accelerate launch --multi_gpu --num_processes 2 examples/nlp_example.py
```
To learn more, check the CLI documentation available [here](https://huggingface.co/docs/accelerate/package_reference/cli).
## Launching multi-CPU run using MPI
🤗 Here is another way to launch multi-CPU run using MPI. You can learn how to install Open MPI on [this page](https://www.open-mpi.org/faq/?category=building#easy-build). You can use Intel MPI or MVAPICH as well.
Once you have MPI setup on your cluster, just run:
```bash
mpirun -np 2 python examples/nlp_example.py
```
## Launching training using DeepSpeed
🤗 Accelerate supports training on single/multiple GPUs using DeepSpeed. To use it, you don't need to change anything in your training code; you can set everything using just `accelerate config`. However, if you desire to tweak your DeepSpeed related args from your Python script, we provide you the `DeepSpeedPlugin`.
```python
from accelerate import Accelerator, DeepSpeedPlugin
# deepspeed needs to know your gradient accumulation steps beforehand, so don't forget to pass it
# Remember you still need to do gradient accumulation by yourself, just like you would have done without deepspeed
deepspeed_plugin = DeepSpeedPlugin(zero_stage=2, gradient_accumulation_steps=2)
accelerator = Accelerator(mixed_precision='fp16', deepspeed_plugin=deepspeed_plugin)
# How to save your 🤗 Transformer?
accelerator.wait_for_everyone()
unwrapped_model = accelerator.unwrap_model(model)
unwrapped_model.save_pretrained(save_dir, save_function=accelerator.save, state_dict=accelerator.get_state_dict(model))
```
Note: DeepSpeed support is experimental for now. In case you get into some problem, please open an issue.
## Launching your training from a notebook
🤗 Accelerate also provides a `notebook_launcher` function you can use in a notebook to launch a distributed training. This is especially useful for Colab or Kaggle notebooks with a TPU backend. Just define your training loop in a `training_function` then in your last cell, add:
```python
from accelerate import notebook_launcher
notebook_launcher(training_function)
```
An example can be found in [this notebook](https://github.com/huggingface/notebooks/blob/main/examples/accelerate_examples/simple_nlp_example.ipynb). [](https://colab.research.google.com/github/huggingface/notebooks/blob/main/examples/accelerate_examples/simple_nlp_example.ipynb)
## Why should I use 🤗 Accelerate?
You should use 🤗 Accelerate when you want to easily run your training scripts in a distributed environment without having to renounce full control over your training loop. This is not a high-level framework above PyTorch, just a thin wrapper so you don't have to learn a new library. In fact, the whole API of 🤗 Accelerate is in one class, the `Accelerator` object.
## Why shouldn't I use 🤗 Accelerate?
You shouldn't use 🤗 Accelerate if you don't want to write a training loop yourself. There are plenty of high-level libraries above PyTorch that will offer you that, 🤗 Accelerate is not one of them.
## Frameworks using 🤗 Accelerate
If you like the simplicity of 🤗 Accelerate but would prefer a higher-level abstraction around its capabilities, some frameworks and libraries that are built on top of 🤗 Accelerate are listed below:
* [Animus](https://github.com/Scitator/animus) is a minimalistic framework to run machine learning experiments. Animus highlights common "breakpoints" in ML experiments and provides a unified interface for them within [IExperiment](https://github.com/Scitator/animus/blob/main/animus/core.py#L76).
* [Catalyst](https://github.com/catalyst-team/catalyst#getting-started) is a PyTorch framework for Deep Learning Research and Development. It focuses on reproducibility, rapid experimentation, and codebase reuse so you can create something new rather than write yet another train loop. Catalyst provides a [Runner](https://catalyst-team.github.io/catalyst/api/core.html#runner) to connect all parts of the experiment: hardware backend, data transformations, model training, and inference logic.
* [fastai](https://github.com/fastai/fastai#installing) is a PyTorch framework for Deep Learning that simplifies training fast and accurate neural nets using modern best practices. fastai provides a [Learner](https://docs.fast.ai/learner.html#Learner) to handle the training, fine-tuning, and inference of deep learning algorithms.
* [Finetuner](https://github.com/jina-ai/finetuner) is a service that enables models to create higher-quality embeddings for semantic search, visual similarity search, cross-modal text<->image search, recommendation systems, clustering, duplication detection, anomaly detection, or other uses.
* [InvokeAI](https://github.com/invoke-ai/InvokeAI) is a creative engine for Stable Diffusion models, offering industry-leading WebUI, terminal usage support, and serves as the foundation for many commercial products.
* [Kornia](https://kornia.readthedocs.io/en/latest/get-started/introduction.html) is a differentiable library that allows classical computer vision to be integrated into deep learning models. Kornia provides a [Trainer](https://kornia.readthedocs.io/en/latest/x.html#kornia.x.Trainer) with the specific purpose to train and fine-tune the supported deep learning algorithms within the library.
* [Open Assistant](https://projects.laion.ai/Open-Assistant/) is a chat-based assistant that understands tasks, can interact with their party systems, and retrieve information dynamically to do so.
* [pytorch-accelerated](https://github.com/Chris-hughes10/pytorch-accelerated) is a lightweight training library, with a streamlined feature set centered around a general-purpose [Trainer](https://pytorch-accelerated.readthedocs.io/en/latest/trainer.html), that places a huge emphasis on simplicity and transparency; enabling users to understand exactly what is going on under the hood, but without having to write and maintain the boilerplate themselves!
* [Stable Diffusion web UI](https://github.com/AUTOMATIC1111/stable-diffusion-webui) is an open-source browser-based easy-to-use interface based on the Gradio library for Stable Diffusion.
* [torchkeras](https://github.com/lyhue1991/torchkeras) is a simple tool for training pytorch model just in a keras style, a dynamic and beautiful plot is provided in notebook to monitor your loss or metric.
* [transformers](https://github.com/huggingface/transformers) as a tool for helping train state-of-the-art machine learning models in PyTorch, Tensorflow, and JAX. (Accelerate is the backend for the PyTorch side).
## Installation
This repository is tested on Python 3.8+ and PyTorch 1.10.0+
You should install 🤗 Accelerate in a [virtual environment](https://docs.python.org/3/library/venv.html). If you're unfamiliar with Python virtual environments, check out the [user guide](https://packaging.python.org/guides/installing-using-pip-and-virtual-environments/).
First, create a virtual environment with the version of Python you're going to use and activate it.
Then, you will need to install PyTorch: refer to the [official installation page](https://pytorch.org/get-started/locally/#start-locally) regarding the specific install command for your platform. Then 🤗 Accelerate can be installed using pip as follows:
```bash
pip install accelerate
```
## Supported integrations
- CPU only
- multi-CPU on one node (machine)
- multi-CPU on several nodes (machines)
- single GPU
- multi-GPU on one node (machine)
- multi-GPU on several nodes (machines)
- TPU
- FP16/BFloat16 mixed precision
- FP8 mixed precision with [Transformer Engine](https://github.com/NVIDIA/TransformerEngine)
- DeepSpeed support (Experimental)
- PyTorch Fully Sharded Data Parallel (FSDP) support (Experimental)
- Megatron-LM support (Experimental)
## Citing 🤗 Accelerate
If you use 🤗 Accelerate in your publication, please cite it by using the following BibTeX entry.
```bibtex
@Misc{accelerate,
title = {Accelerate: Training and inference at scale made simple, efficient and adaptable.},
author = {Sylvain Gugger, Lysandre Debut, Thomas Wolf, Philipp Schmid, Zachary Mueller, Sourab Mangrulkar},
howpublished = {\url{https://github.com/huggingface/accelerate}},
year = {2022}
}
```
| 0 |
hf_public_repos
|
hf_public_repos/accelerate/LICENSE
|
Apache License
Version 2.0, January 2004
http://www.apache.org/licenses/
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
1. Definitions.
"License" shall mean the terms and conditions for use, reproduction,
and distribution as defined by Sections 1 through 9 of this document.
"Licensor" shall mean the copyright owner or entity authorized by
the copyright owner that is granting the License.
"Legal Entity" shall mean the union of the acting entity and all
other entities that control, are controlled by, or are under common
control with that entity. For the purposes of this definition,
"control" means (i) the power, direct or indirect, to cause the
direction or management of such entity, whether by contract or
otherwise, or (ii) ownership of fifty percent (50%) or more of the
outstanding shares, or (iii) beneficial ownership of such entity.
"You" (or "Your") shall mean an individual or Legal Entity
exercising permissions granted by this License.
"Source" form shall mean the preferred form for making modifications,
including but not limited to software source code, documentation
source, and configuration files.
"Object" form shall mean any form resulting from mechanical
transformation or translation of a Source form, including but
not limited to compiled object code, generated documentation,
and conversions to other media types.
"Work" shall mean the work of authorship, whether in Source or
Object form, made available under the License, as indicated by a
copyright notice that is included in or attached to the work
(an example is provided in the Appendix below).
"Derivative Works" shall mean any work, whether in Source or Object
form, that is based on (or derived from) the Work and for which the
editorial revisions, annotations, elaborations, or other modifications
represent, as a whole, an original work of authorship. For the purposes
of this License, Derivative Works shall not include works that remain
separable from, or merely link (or bind by name) to the interfaces of,
the Work and Derivative Works thereof.
"Contribution" shall mean any work of authorship, including
the original version of the Work and any modifications or additions
to that Work or Derivative Works thereof, that is intentionally
submitted to Licensor for inclusion in the Work by the copyright owner
or by an individual or Legal Entity authorized to submit on behalf of
the copyright owner. For the purposes of this definition, "submitted"
means any form of electronic, verbal, or written communication sent
to the Licensor or its representatives, including but not limited to
communication on electronic mailing lists, source code control systems,
and issue tracking systems that are managed by, or on behalf of, the
Licensor for the purpose of discussing and improving the Work, but
excluding communication that is conspicuously marked or otherwise
designated in writing by the copyright owner as "Not a Contribution."
"Contributor" shall mean Licensor and any individual or Legal Entity
on behalf of whom a Contribution has been received by Licensor and
subsequently incorporated within the Work.
2. Grant of Copyright License. Subject to the terms and conditions of
this License, each Contributor hereby grants to You a perpetual,
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
copyright license to reproduce, prepare Derivative Works of,
publicly display, publicly perform, sublicense, and distribute the
Work and such Derivative Works in Source or Object form.
3. Grant of Patent License. Subject to the terms and conditions of
this License, each Contributor hereby grants to You a perpetual,
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
(except as stated in this section) patent license to make, have made,
use, offer to sell, sell, import, and otherwise transfer the Work,
where such license applies only to those patent claims licensable
by such Contributor that are necessarily infringed by their
Contribution(s) alone or by combination of their Contribution(s)
with the Work to which such Contribution(s) was submitted. If You
institute patent litigation against any entity (including a
cross-claim or counterclaim in a lawsuit) alleging that the Work
or a Contribution incorporated within the Work constitutes direct
or contributory patent infringement, then any patent licenses
granted to You under this License for that Work shall terminate
as of the date such litigation is filed.
4. Redistribution. You may reproduce and distribute copies of the
Work or Derivative Works thereof in any medium, with or without
modifications, and in Source or Object form, provided that You
meet the following conditions:
(a) You must give any other recipients of the Work or
Derivative Works a copy of this License; and
(b) You must cause any modified files to carry prominent notices
stating that You changed the files; and
(c) You must retain, in the Source form of any Derivative Works
that You distribute, all copyright, patent, trademark, and
attribution notices from the Source form of the Work,
excluding those notices that do not pertain to any part of
the Derivative Works; and
(d) If the Work includes a "NOTICE" text file as part of its
distribution, then any Derivative Works that You distribute must
include a readable copy of the attribution notices contained
within such NOTICE file, excluding those notices that do not
pertain to any part of the Derivative Works, in at least one
of the following places: within a NOTICE text file distributed
as part of the Derivative Works; within the Source form or
documentation, if provided along with the Derivative Works; or,
within a display generated by the Derivative Works, if and
wherever such third-party notices normally appear. The contents
of the NOTICE file are for informational purposes only and
do not modify the License. You may add Your own attribution
notices within Derivative Works that You distribute, alongside
or as an addendum to the NOTICE text from the Work, provided
that such additional attribution notices cannot be construed
as modifying the License.
You may add Your own copyright statement to Your modifications and
may provide additional or different license terms and conditions
for use, reproduction, or distribution of Your modifications, or
for any such Derivative Works as a whole, provided Your use,
reproduction, and distribution of the Work otherwise complies with
the conditions stated in this License.
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
6. Trademarks. This License does not grant permission to use the trade
names, trademarks, service marks, or product names of the Licensor,
except as required for reasonable and customary use in describing the
origin of the Work and reproducing the content of the NOTICE file.
7. Disclaimer of Warranty. Unless required by applicable law or
agreed to in writing, Licensor provides the Work (and each
Contributor provides its Contributions) on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
implied, including, without limitation, any warranties or conditions
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
PARTICULAR PURPOSE. You are solely responsible for determining the
appropriateness of using or redistributing the Work and assume any
risks associated with Your exercise of permissions under this License.
8. Limitation of Liability. In no event and under no legal theory,
whether in tort (including negligence), contract, or otherwise,
unless required by applicable law (such as deliberate and grossly
negligent acts) or agreed to in writing, shall any Contributor be
liable to You for damages, including any direct, indirect, special,
incidental, or consequential damages of any character arising as a
result of this License or out of the use or inability to use the
Work (including but not limited to damages for loss of goodwill,
work stoppage, computer failure or malfunction, or any and all
other commercial damages or losses), even if such Contributor
has been advised of the possibility of such damages.
9. Accepting Warranty or Additional Liability. While redistributing
the Work or Derivative Works thereof, You may choose to offer,
and charge a fee for, acceptance of support, warranty, indemnity,
or other liability obligations and/or rights consistent with this
License. However, in accepting such obligations, You may act only
on Your own behalf and on Your sole responsibility, not on behalf
of any other Contributor, and only if You agree to indemnify,
defend, and hold each Contributor harmless for any liability
incurred by, or claims asserted against, such Contributor by reason
of your accepting any such warranty or additional liability.
END OF TERMS AND CONDITIONS
APPENDIX: How to apply the Apache License to your work.
To apply the Apache License to your work, attach the following
boilerplate notice, with the fields enclosed by brackets "[]"
replaced with your own identifying information. (Don't include
the brackets!) The text should be enclosed in the appropriate
comment syntax for the file format. We also recommend that a
file or class name and description of purpose be included on the
same "printed page" as the copyright notice for easier
identification within third-party archives.
Copyright [yyyy] [name of copyright owner]
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
| 0 |
hf_public_repos
|
hf_public_repos/accelerate/setup.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from setuptools import setup
from setuptools import find_packages
extras = {}
extras["quality"] = ["black ~= 23.1", "ruff >= 0.0.241", "hf-doc-builder >= 0.3.0", "urllib3 < 2.0.0"]
extras["docs"] = []
extras["test_prod"] = ["pytest", "pytest-xdist", "pytest-subtests", "parameterized"]
extras["test_dev"] = ["datasets", "evaluate", "transformers", "scipy", "scikit-learn", "deepspeed", "tqdm"]
extras["testing"] = extras["test_prod"] + extras["test_dev"]
extras["rich"] = ["rich"]
extras["test_trackers"] = ["wandb", "comet-ml", "tensorboard"]
extras["dev"] = extras["quality"] + extras["testing"] + extras["rich"]
extras["sagemaker"] = [
"sagemaker", # boto3 is a required package in sagemaker
]
setup(
name="accelerate",
version="0.22.0.dev0",
description="Accelerate",
long_description=open("README.md", "r", encoding="utf-8").read(),
long_description_content_type="text/markdown",
keywords="deep learning",
license="Apache",
author="The HuggingFace team",
author_email="sylvain@huggingface.co",
url="https://github.com/huggingface/accelerate",
package_dir={"": "src"},
packages=find_packages("src"),
entry_points={
"console_scripts": [
"accelerate=accelerate.commands.accelerate_cli:main",
"accelerate-config=accelerate.commands.config:main",
"accelerate-launch=accelerate.commands.launch:main",
]
},
python_requires=">=3.8.0",
install_requires=["numpy>=1.17", "packaging>=20.0", "psutil", "pyyaml", "torch>=1.10.0"],
extras_require=extras,
classifiers=[
"Development Status :: 5 - Production/Stable",
"Intended Audience :: Developers",
"Intended Audience :: Education",
"Intended Audience :: Science/Research",
"License :: OSI Approved :: Apache Software License",
"Operating System :: OS Independent",
"Programming Language :: Python :: 3",
"Programming Language :: Python :: 3.8",
"Topic :: Scientific/Engineering :: Artificial Intelligence",
],
)
# Release checklist
# 1. Change the version in __init__.py and setup.py.
# 2. Commit these changes with the message: "Release: VERSION"
# 3. Add a tag in git to mark the release: "git tag VERSION -m 'Adds tag VERSION for pypi' "
# Push the tag to git: git push --tags origin main
# 4. Run the following commands in the top-level directory:
# python setup.py bdist_wheel
# python setup.py sdist
# 5. Upload the package to the pypi test server first:
# twine upload dist/* -r pypitest
# twine upload dist/* -r pypitest --repository-url=https://test.pypi.org/legacy/
# 6. Check that you can install it in a virtualenv by running:
# pip install -i https://testpypi.python.org/pypi accelerate
# accelerate env
# accelerate test
# 7. Upload the final version to actual pypi:
# twine upload dist/* -r pypi
# 8. Add release notes to the tag in github once everything is looking hunky-dory.
# 9. Update the version in __init__.py, setup.py to the new version "-dev" and push to master
| 0 |
hf_public_repos
|
hf_public_repos/accelerate/pyproject.toml
|
[tool.black]
line-length = 119
target-version = ['py37']
[tool.ruff]
# Never enforce `E501` (line length violations).
ignore = ["E501", "E741", "W605"]
select = ["E", "F", "I", "W"]
line-length = 119
# Ignore import violations in all `__init__.py` files.
[tool.ruff.per-file-ignores]
"__init__.py" = ["E402", "F401", "F403", "F811"]
[tool.ruff.isort]
lines-after-imports = 2
known-first-party = ["accelerate"]
| 0 |
hf_public_repos
|
hf_public_repos/accelerate/setup.cfg
|
[isort]
default_section = FIRSTPARTY
ensure_newline_before_comments = True
force_grid_wrap = 0
include_trailing_comma = True
known_first_party = accelerate
line_length = 119
lines_after_imports = 2
multi_line_output = 3
use_parentheses = True
[flake8]
ignore = E203, E722, E501, E741, W503, W605
max-line-length = 119
| 0 |
hf_public_repos
|
hf_public_repos/accelerate/CODE_OF_CONDUCT.md
|
# Contributor Covenant Code of Conduct
## Our Pledge
We as members, contributors, and leaders pledge to make participation in our
community a harassment-free experience for everyone, regardless of age, body
size, visible or invisible disability, ethnicity, sex characteristics, gender
identity and expression, level of experience, education, socio-economic status,
nationality, personal appearance, race, religion, or sexual identity
and orientation.
We pledge to act and interact in ways that contribute to an open, welcoming,
diverse, inclusive, and healthy community.
## Our Standards
Examples of behavior that contributes to a positive environment for our
community include:
* Demonstrating empathy and kindness toward other people
* Being respectful of differing opinions, viewpoints, and experiences
* Giving and gracefully accepting constructive feedback
* Accepting responsibility and apologizing to those affected by our mistakes,
and learning from the experience
* Focusing on what is best not just for us as individuals, but for the
overall community
Examples of unacceptable behavior include:
* The use of sexualized language or imagery, and sexual attention or
advances of any kind
* Trolling, insulting or derogatory comments, and personal or political attacks
* Public or private harassment
* Publishing others' private information, such as a physical or email
address, without their explicit permission
* Other conduct which could reasonably be considered inappropriate in a
professional setting
## Enforcement Responsibilities
Community leaders are responsible for clarifying and enforcing our standards of
acceptable behavior and will take appropriate and fair corrective action in
response to any behavior that they deem inappropriate, threatening, offensive,
or harmful.
Community leaders have the right and responsibility to remove, edit, or reject
comments, commits, code, wiki edits, issues, and other contributions that are
not aligned to this Code of Conduct, and will communicate reasons for moderation
decisions when appropriate.
## Scope
This Code of Conduct applies within all community spaces, and also applies when
an individual is officially representing the community in public spaces.
Examples of representing our community include using an official e-mail address,
posting via an official social media account, or acting as an appointed
representative at an online or offline event.
## Enforcement
Instances of abusive, harassing, or otherwise unacceptable behavior may be
reported to the community leaders responsible for enforcement at
feedback@huggingface.co.
All complaints will be reviewed and investigated promptly and fairly.
All community leaders are obligated to respect the privacy and security of the
reporter of any incident.
## Enforcement Guidelines
Community leaders will follow these Community Impact Guidelines in determining
the consequences for any action they deem in violation of this Code of Conduct:
### 1. Correction
**Community Impact**: Use of inappropriate language or other behavior deemed
unprofessional or unwelcome in the community.
**Consequence**: A private, written warning from community leaders, providing
clarity around the nature of the violation and an explanation of why the
behavior was inappropriate. A public apology may be requested.
### 2. Warning
**Community Impact**: A violation through a single incident or series
of actions.
**Consequence**: A warning with consequences for continued behavior. No
interaction with the people involved, including unsolicited interaction with
those enforcing the Code of Conduct, for a specified period of time. This
includes avoiding interactions in community spaces as well as external channels
like social media. Violating these terms may lead to a temporary or
permanent ban.
### 3. Temporary Ban
**Community Impact**: A serious violation of community standards, including
sustained inappropriate behavior.
**Consequence**: A temporary ban from any sort of interaction or public
communication with the community for a specified period of time. No public or
private interaction with the people involved, including unsolicited interaction
with those enforcing the Code of Conduct, is allowed during this period.
Violating these terms may lead to a permanent ban.
### 4. Permanent Ban
**Community Impact**: Demonstrating a pattern of violation of community
standards, including sustained inappropriate behavior, harassment of an
individual, or aggression toward or disparagement of classes of individuals.
**Consequence**: A permanent ban from any sort of public interaction within
the community.
## Attribution
This Code of Conduct is adapted from the [Contributor Covenant][homepage],
version 2.0, available at
https://www.contributor-covenant.org/version/2/0/code_of_conduct.html.
Community Impact Guidelines were inspired by [Mozilla's code of conduct
enforcement ladder](https://github.com/mozilla/diversity).
[homepage]: https://www.contributor-covenant.org
For answers to common questions about this code of conduct, see the FAQ at
https://www.contributor-covenant.org/faq. Translations are available at
https://www.contributor-covenant.org/translations.
| 0 |
hf_public_repos
|
hf_public_repos/accelerate/CONTRIBUTING.md
|
<!---
Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
# How to contribute to 🤗 Accelerate?
Everyone is welcome to contribute, and we value everybody's contribution. Code
is thus not the only way to help the community. Answering questions, helping
others, reaching out and improving the documentations are immensely valuable to
the community.
It also helps us if you spread the word: reference the library from blog posts
on the awesome projects it made possible, shout out on Twitter every time it has
helped you, or simply star the repo to say "thank you".
Whichever way you choose to contribute, please be mindful to respect our
[code of conduct](https://github.com/huggingface/accelerate/blob/main/CODE_OF_CONDUCT.md).
## You can contribute in so many ways!
Some of the ways you can contribute to Accelerate:
* Fixing outstanding issues with the existing code;
* Contributing to the examples or to the documentation;
* Submitting issues related to bugs or desired new features.
## Submitting a new issue or feature request
Do your best to follow these guidelines when submitting an issue or a feature
request. It will make it easier for us to come back to you quickly and with good
feedback.
### Did you find a bug?
The 🤗 Accelerate library is robust and reliable thanks to the users who notify us of
the problems they encounter. So thank you for reporting an issue.
First, we would really appreciate it if you could **make sure the bug was not
already reported** (use the search bar on Github under Issues).
Did not find it? :( So we can act quickly on it, please follow these steps:
* Include your **OS type and version**, the versions of **Python** and **PyTorch**.
* A short, self-contained, code snippet that allows us to reproduce the bug in
less than 30s;
* Provide the with your Accelerate configuration (located by default in `~/.cache/huggingface/accelerate/default_config.yaml`)
### Do you want a new feature?
A good feature request addresses the following points:
1. Motivation first:
* Is it related to a problem/frustration with the library? If so, please explain
why. Providing a code snippet that demonstrates the problem is best.
* Is it related to something you would need for a project? We'd love to hear
about it!
* Is it something you worked on and think could benefit the community?
Awesome! Tell us what problem it solved for you.
2. Write a *full paragraph* describing the feature;
3. Provide a **code snippet** that demonstrates its future use;
4. In case this is related to a paper, please attach a link;
5. Attach any additional information (drawings, screenshots, etc.) you think may help.
If your issue is well written we're already 80% of the way there by the time you
post it.
## Submitting a pull request (PR)
Before writing code, we strongly advise you to search through the existing PRs or
issues to make sure that nobody is already working on the same thing. If you are
unsure, it is always a good idea to open an issue to get some feedback.
You will need basic `git` proficiency to be able to contribute to
🤗 Accelerate. `git` is not the easiest tool to use but it has the greatest
manual. Type `git --help` in a shell and enjoy. If you prefer books, [Pro
Git](https://git-scm.com/book/en/v2) is a very good reference.
Follow these steps to start contributing:
1. Fork the [repository](https://github.com/huggingface/accelerate) by
clicking on the 'Fork' button on the repository's page. This creates a copy of the code
under your GitHub user account.
2. Clone your fork to your local disk, and add the base repository as a remote. The following command
assumes you have your public SSH key uploaded to GitHub. See the following guide for more
[information](https://docs.github.com/en/repositories/creating-and-managing-repositories/cloning-a-repository).
```bash
$ git clone git@github.com:<your Github handle>/accelerate.git
$ cd accelerate
$ git remote add upstream https://github.com/huggingface/accelerate.git
```
3. Create a new branch to hold your development changes, and do this for every new PR you work on.
Start by synchronizing your `main` branch with the `upstream/main` branch (ore details in the [GitHub Docs](https://docs.github.com/en/github/collaborating-with-issues-and-pull-requests/syncing-a-fork)):
```bash
$ git checkout main
$ git fetch upstream
$ git merge upstream/main
```
Once your `main` branch is synchronized, create a new branch from it:
```bash
$ git checkout -b a-descriptive-name-for-my-changes
```
**Do not** work on the `main` branch.
4. Set up a development environment by running the following command in a conda or a virtual environment you've created for working on this library:
```bash
$ pip install -e ".[quality]"
```
(If accelerate was already installed in the virtual environment, remove
it with `pip uninstall accelerate` before reinstalling it in editable
mode with the `-e` flag.)
Alternatively, if you are using [Visual Studio Code](https://code.visualstudio.com/Download), the fastest way to get set up is by using
the provided Dev Container. Documentation on how to get started with dev containers is available [here](https://code.visualstudio.com/docs/remote/containers).
5. Develop the features on your branch.
As you work on the features, you should make sure that the test suite
passes. You should run the tests impacted by your changes like this (see
below an explanation regarding the environment variable):
```bash
$ pytest tests/<TEST_TO_RUN>.py
```
> For the following commands leveraging the `make` utility, we recommend using the WSL system when running on
> Windows. More information [here](https://docs.microsoft.com/en-us/windows/wsl/about).
You can also run the full suite with the following command.
```bash
$ make test
```
`accelerate` relies on `black` and `ruff` to format its source code
consistently. After you make changes, apply automatic style corrections and code verifications
that can't be automated in one go with:
This target is also optimized to only work with files modified by the PR you're working on.
If you prefer to run the checks one after the other, the following command apply the
style corrections:
```bash
$ make style
```
`accelerate` also uses a few custom scripts to check for coding mistakes. Quality
control runs in CI, however you can also run the same checks with:
```bash
$ make quality
```
Once you're happy with your changes, add changed files using `git add` and
make a commit with `git commit` to record your changes locally:
```bash
$ git add modified_file.py
$ git commit
```
Please write [good commit messages](https://chris.beams.io/posts/git-commit/).
It is a good idea to sync your copy of the code with the original
repository regularly. This way you can quickly account for changes:
```bash
$ git fetch upstream
$ git rebase upstream/main
```
Push the changes to your account using:
```bash
$ git push -u origin a-descriptive-name-for-my-changes
```
6. Once you are satisfied (**and the checklist below is happy too**), go to the
webpage of your fork on GitHub. Click on 'Pull request' to send your changes
to the project maintainers for review.
7. It's ok if maintainers ask you for changes. It happens to core contributors
too! So everyone can see the changes in the Pull request, work in your local
branch and push the changes to your fork. They will automatically appear in
the pull request.
### Checklist
1. The title of your pull request should be a summary of its contribution;
2. If your pull request addresses an issue, please mention the issue number in
the pull request description to make sure they are linked (and people
consulting the issue know you are working on it);
3. To indicate a work in progress please prefix the title with `[WIP]`, or mark
the PR as a draft PR. These are useful to avoid duplicated work, and to differentiate
it from PRs ready to be merged;
4. Make sure existing tests pass;
5. Add high-coverage tests. No quality testing = no merge.
See an example of a good PR here: https://github.com/huggingface/accelerate/pull/255
### Tests
An extensive test suite is included to test the library behavior and several examples. Library tests can be found in
the [tests folder](https://github.com/huggingface/accelerate/tree/main/tests).
We use `pytest` in order to run the tests. From the root of the
repository, here's how to run tests with `pytest` for the library:
```bash
$ python -m pytest -sv ./tests
```
In fact, that's how `make test` is implemented (sans the `pip install` line)!
You can specify a smaller set of tests in order to test only the feature
you're working on.
| 0 |
hf_public_repos
|
hf_public_repos/accelerate/Makefile
|
.PHONY: quality style test docs utils
check_dirs := tests src examples benchmarks utils
# Check that source code meets quality standards
extra_quality_checks:
python utils/check_copies.py
python utils/check_dummies.py
python utils/check_repo.py
doc-builder style src/accelerate docs/source --max_len 119
# this target runs checks on all files
quality:
black --required-version 23 --check $(check_dirs)
ruff $(check_dirs)
doc-builder style src/accelerate docs/source --max_len 119 --check_only
# Format source code automatically and check is there are any problems left that need manual fixing
style:
black --required-version 23 $(check_dirs)
ruff $(check_dirs) --fix
doc-builder style src/accelerate docs/source --max_len 119
# Run tests for the library
test:
python -m pytest -s -v ./tests/ --ignore=./tests/test_examples.py $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_all.log",)
test_big_modeling:
python -m pytest -s -v ./tests/test_big_modeling.py ./tests/test_modeling_utils.py $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_big_modeling.log",)
test_core:
python -m pytest -s -v ./tests/ --ignore=./tests/test_examples.py --ignore=./tests/deepspeed --ignore=./tests/test_big_modeling.py \
--ignore=./tests/fsdp --ignore=./tests/test_cli.py $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_core.log",)
test_cli:
python -m pytest -s -v ./tests/test_cli.py $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_cli.log",)
test_deepspeed:
python -m pytest -s -v ./tests/deepspeed $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_deepspeed.log",)
test_fsdp:
python -m pytest -s -v ./tests/fsdp $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_fsdp.log",)
test_examples:
python -m pytest -s -v ./tests/test_examples.py $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_examples.log",)
# Broken down example tests for the CI runners
test_integrations:
python -m pytest -s -v ./tests/deepspeed ./tests/fsdp $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_integrations.log",)
test_example_differences:
python -m pytest -s -v ./tests/test_examples.py::ExampleDifferenceTests $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_example_diff.log",)
test_checkpoint_epoch:
python -m pytest -s -v ./tests/test_examples.py::FeatureExamplesTests -k "by_epoch" $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_checkpoint_epoch.log",)
test_checkpoint_step:
python -m pytest -s -v ./tests/test_examples.py::FeatureExamplesTests -k "by_step" $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_checkpoint_step.log",)
# Same as test but used to install only the base dependencies
test_prod:
$(MAKE) test_core
test_rest:
python -m pytest -s -v ./tests/test_examples.py::FeatureExamplesTests -k "not by_step and not by_epoch" $(if $(IS_GITHUB_CI),--report-log "$(PYTORCH_VERSION)_rest.log",)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/examples/requirements.txt
|
accelerate # used to be installed in Amazon SageMaker environment
evaluate
datasets==2.3.2
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/examples/README.md
|
<!---
Copyright 2021 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
# In this folder we showcase various full examples using 🤗 Accelerate
## Simple NLP example
The [nlp_example.py](./nlp_example.py) script is a simple example to train a Bert model on a classification task ([GLUE's MRPC](https://www.microsoft.com/en-us/download/details.aspx?id=52398)).
Prior to running it you should install 🤗 Dataset and 🤗 Transformers:
```bash
pip install datasets evaluate transformers
```
The same script can be run in any of the following configurations:
- single CPU or single GPU
- multi GPUs (using PyTorch distributed mode)
- (multi) TPUs
- fp16 (mixed-precision) or fp32 (normal precision)
To run it in each of these various modes, use the following commands:
- single CPU:
* from a server without GPU
```bash
python ./nlp_example.py
```
* from any server by passing `cpu=True` to the `Accelerator`.
```bash
python ./nlp_example.py --cpu
```
* from any server with Accelerate launcher
```bash
accelerate launch --cpu ./nlp_example.py
```
- single GPU:
```bash
python ./nlp_example.py # from a server with a GPU
```
- with fp16 (mixed-precision)
* from any server by passing `mixed_precison=fp16` to the `Accelerator`.
```bash
python ./nlp_example.py --mixed_precision fp16
```
* from any server with Accelerate launcher
```bash
accelerate launch --mixed_precision fp16 ./nlp_example.py
- multi GPUs (using PyTorch distributed mode)
* With Accelerate config and launcher
```bash
accelerate config # This will create a config file on your server
accelerate launch ./nlp_example.py # This will run the script on your server
```
* With traditional PyTorch launcher (`torch.distributed.launch` can be used with older versions of PyTorch)
```bash
python -m torchrun --nproc_per_node 2 --use_env ./nlp_example.py
```
- multi GPUs, multi node (several machines, using PyTorch distributed mode)
* With Accelerate config and launcher, on each machine:
```bash
accelerate config # This will create a config file on each server
accelerate launch ./nlp_example.py # This will run the script on each server
```
* With PyTorch launcher only (`torch.distributed.launch` can be used in older versions of PyTorch)
```bash
python -m torchrun --nproc_per_node 2 \
--use_env \
--node_rank 0 \
--master_addr master_node_ip_address \
./nlp_example.py # On the first server
python -m torchrun --nproc_per_node 2 \
--use_env \
--node_rank 1 \
--master_addr master_node_ip_address \
./nlp_example.py # On the second server
```
- (multi) TPUs
* With Accelerate config and launcher
```bash
accelerate config # This will create a config file on your TPU server
accelerate launch ./nlp_example.py # This will run the script on each server
```
* In PyTorch:
Add an `xmp.spawn` line in your script as you usually do.
## Simple vision example
The [cv_example.py](./cv_example.py) script is a simple example to fine-tune a ResNet-50 on a classification task ([Ofxord-IIT Pet Dataset](https://www.robots.ox.ac.uk/~vgg/data/pets/)).
The same script can be run in any of the following configurations:
- single CPU or single GPU
- multi GPUs (using PyTorch distributed mode)
- (multi) TPUs
- fp16 (mixed-precision) or fp32 (normal precision)
Prior to running it you should install timm and torchvision:
```bash
pip install timm torchvision
```
and you should download the data with the following commands:
```bash
wget https://www.robots.ox.ac.uk/~vgg/data/pets/data/images.tar.gz
tar -xzf images.tar.gz
```
To run it in each of these various modes, use the following commands:
- single CPU:
* from a server without GPU
```bash
python ./cv_example.py --data_dir path_to_data
```
* from any server by passing `cpu=True` to the `Accelerator`.
```bash
python ./cv_example.py --data_dir path_to_data --cpu
```
* from any server with Accelerate launcher
```bash
accelerate launch --cpu ./cv_example.py --data_dir path_to_data
```
- single GPU:
```bash
python ./cv_example.py # from a server with a GPU
```
- with fp16 (mixed-precision)
* from any server by passing `mixed_precison=fp16` to the `Accelerator`.
```bash
python ./cv_example.py --data_dir path_to_data --mixed_precison fp16
```
* from any server with Accelerate launcher
```bash
accelerate launch --mixed_precison fp16 ./cv_example.py --data_dir path_to_data
- multi GPUs (using PyTorch distributed mode)
* With Accelerate config and launcher
```bash
accelerate config # This will create a config file on your server
accelerate launch ./cv_example.py --data_dir path_to_data # This will run the script on your server
```
* With traditional PyTorch launcher (`torch.distributed.launch` can be used with older versions of PyTorch)
```bash
python -m torchrun --nproc_per_node 2 --use_env ./cv_example.py --data_dir path_to_data
```
- multi GPUs, multi node (several machines, using PyTorch distributed mode)
* With Accelerate config and launcher, on each machine:
```bash
accelerate config # This will create a config file on each server
accelerate launch ./cv_example.py --data_dir path_to_data # This will run the script on each server
```
* With PyTorch launcher only (`torch.distributed.launch` can be used with older versions of PyTorch)
```bash
python -m torchrun --nproc_per_node 2 \
--use_env \
--node_rank 0 \
--master_addr master_node_ip_address \
./cv_example.py --data_dir path_to_data # On the first server
python -m torchrun --nproc_per_node 2 \
--use_env \
--node_rank 1 \
--master_addr master_node_ip_address \
./cv_example.py --data_dir path_to_data # On the second server
```
- (multi) TPUs
* With Accelerate config and launcher
```bash
accelerate config # This will create a config file on your TPU server
accelerate launch ./cv_example.py --data_dir path_to_data # This will run the script on each server
```
* In PyTorch:
Add an `xmp.spawn` line in your script as you usually do.
### Simple vision example (GANs)
- [huggan project](https://github.com/huggingface/community-events/tree/main/huggan)
### Using AWS SageMaker integration
- [Examples showcasing AWS SageMaker integration of 🤗 Accelerate.](https://github.com/pacman100/accelerate-aws-sagemaker)
## Simple Multi-GPU Hardware Launcher
[multigpu_remote_launcher.py](./multigpu_remote_launcher.py) is a minimal script that demonstrates launching accelerate
on multiple remote GPUs, and with automatic hardware environment and dependency setup for reproducibility. You can
easily customize the training function used, training arguments, hyperparameters, and type of compute hardware, and then
run the script to automatically launch multi GPU training on remote hardware.
This script uses [Runhouse](https://github.com/run-house/runhouse) to launch on self-hosted hardware (e.g. in your own
cloud account or on-premise cluster) but there are other options for running remotely as well. Runhouse can be installed
with `pip install runhouse`, and you can refer to
[hardware setup](https://runhouse-docs.readthedocs-hosted.com/en/latest/api/python/cluster.html#hardware-setup)
for hardware setup instructions, or this
[Colab tutorial](https://colab.research.google.com/drive/1qVwYyLTCPYPSdz9ZX7BZl9Qm0A3j7RJe) for a more in-depth walkthrough.
## Finer Examples
While the first two scripts are extremely barebones when it comes to what you can do with accelerate, more advanced features are documented in two other locations.
### `by_feature` examples
These scripts are *individual* examples highlighting one particular feature or use-case within Accelerate. They all stem from the [nlp_example.py](./nlp_example.py) script, and any changes or modifications is denoted with a `# New Code #` comment.
Read the README.md file located in the `by_feature` folder for more information.
### `complete_*` examples
These two scripts contain *every* single feature currently available in Accelerate in one place, as one giant script.
New arguments that can be passed include:
- `checkpointing_steps`, whether the various states should be saved at the end of every `n` steps, or `"epoch"` for each epoch. States are then saved to folders named `step_{n}` or `epoch_{n}`
- `resume_from_checkpoint`, should be used if you want to resume training off of a previous call to the script and passed a `checkpointing_steps` to it.
- `with_tracking`, should be used if you want to log the training run using all available experiment trackers in your environment. Currently supported trackers include TensorBoard, Weights and Biases, and CometML.
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/examples/cv_example.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import re
import numpy as np
import PIL
import torch
from timm import create_model
from torch.optim.lr_scheduler import OneCycleLR
from torch.utils.data import DataLoader, Dataset
from torchvision.transforms import Compose, RandomResizedCrop, Resize, ToTensor
from accelerate import Accelerator
########################################################################
# This is a fully working simple example to use Accelerate
#
# This example trains a ResNet50 on the Oxford-IIT Pet Dataset
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
# Function to get the label from the filename
def extract_label(fname):
stem = fname.split(os.path.sep)[-1]
return re.search(r"^(.*)_\d+\.jpg$", stem).groups()[0]
class PetsDataset(Dataset):
def __init__(self, file_names, image_transform=None, label_to_id=None):
self.file_names = file_names
self.image_transform = image_transform
self.label_to_id = label_to_id
def __len__(self):
return len(self.file_names)
def __getitem__(self, idx):
fname = self.file_names[idx]
raw_image = PIL.Image.open(fname)
image = raw_image.convert("RGB")
if self.image_transform is not None:
image = self.image_transform(image)
label = extract_label(fname)
if self.label_to_id is not None:
label = self.label_to_id[label]
return {"image": image, "label": label}
def training_function(config, args):
# Initialize accelerator
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
image_size = config["image_size"]
if not isinstance(image_size, (list, tuple)):
image_size = (image_size, image_size)
# Grab all the image filenames
file_names = [os.path.join(args.data_dir, fname) for fname in os.listdir(args.data_dir) if fname.endswith(".jpg")]
# Build the label correspondences
all_labels = [extract_label(fname) for fname in file_names]
id_to_label = list(set(all_labels))
id_to_label.sort()
label_to_id = {lbl: i for i, lbl in enumerate(id_to_label)}
# Set the seed before splitting the data.
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
# Split our filenames between train and validation
random_perm = np.random.permutation(len(file_names))
cut = int(0.8 * len(file_names))
train_split = random_perm[:cut]
eval_split = random_perm[cut:]
# For training we use a simple RandomResizedCrop
train_tfm = Compose([RandomResizedCrop(image_size, scale=(0.5, 1.0)), ToTensor()])
train_dataset = PetsDataset(
[file_names[i] for i in train_split], image_transform=train_tfm, label_to_id=label_to_id
)
# For evaluation, we use a deterministic Resize
eval_tfm = Compose([Resize(image_size), ToTensor()])
eval_dataset = PetsDataset([file_names[i] for i in eval_split], image_transform=eval_tfm, label_to_id=label_to_id)
# Instantiate dataloaders.
train_dataloader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size, num_workers=4)
eval_dataloader = DataLoader(eval_dataset, shuffle=False, batch_size=batch_size, num_workers=4)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = create_model("resnet50d", pretrained=True, num_classes=len(label_to_id))
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Freezing the base model
for param in model.parameters():
param.requires_grad = False
for param in model.get_classifier().parameters():
param.requires_grad = True
# We normalize the batches of images to be a bit faster.
mean = torch.tensor(model.default_cfg["mean"])[None, :, None, None].to(accelerator.device)
std = torch.tensor(model.default_cfg["std"])[None, :, None, None].to(accelerator.device)
# Instantiate optimizer
optimizer = torch.optim.Adam(params=model.parameters(), lr=lr / 25)
# Instantiate learning rate scheduler
lr_scheduler = OneCycleLR(optimizer=optimizer, max_lr=lr, epochs=num_epochs, steps_per_epoch=len(train_dataloader))
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch = {k: v.to(accelerator.device) for k, v in batch.items()}
inputs = (batch["image"] - mean) / std
outputs = model(inputs)
loss = torch.nn.functional.cross_entropy(outputs, batch["label"])
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
accurate = 0
num_elems = 0
for _, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch = {k: v.to(accelerator.device) for k, v in batch.items()}
inputs = (batch["image"] - mean) / std
with torch.no_grad():
outputs = model(inputs)
predictions = outputs.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["label"]))
accurate_preds = predictions == references
num_elems += accurate_preds.shape[0]
accurate += accurate_preds.long().sum()
eval_metric = accurate.item() / num_elems
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}: {100 * eval_metric:.2f}")
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument("--data_dir", required=True, help="The data folder on disk.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument(
"--checkpointing_steps",
type=str,
default=None,
help="Whether the various states should be saved at the end of every n steps, or 'epoch' for each epoch.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
args = parser.parse_args()
config = {"lr": 3e-2, "num_epochs": 3, "seed": 42, "batch_size": 64, "image_size": 224}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/examples/complete_nlp_example.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
########################################################################
# This is a fully working simple example to use Accelerate
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# This example also demonstrates the checkpointing and sharding capabilities
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def training_function(config, args):
# Initialize accelerator
if args.with_tracking:
accelerator = Accelerator(
cpu=args.cpu, mixed_precision=args.mixed_precision, log_with="all", project_dir=args.project_dir
)
else:
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
if hasattr(args.checkpointing_steps, "isdigit"):
if args.checkpointing_steps == "epoch":
checkpointing_steps = args.checkpointing_steps
elif args.checkpointing_steps.isdigit():
checkpointing_steps = int(args.checkpointing_steps)
else:
raise ValueError(
f"Argument `checkpointing_steps` must be either a number or `epoch`. `{args.checkpointing_steps}` passed."
)
else:
checkpointing_steps = None
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
# We need to initialize the trackers we use, and also store our configuration
if args.with_tracking:
run = os.path.split(__file__)[-1].split(".")[0]
accelerator.init_trackers(run, config)
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
metric = evaluate.load("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
# If the batch size is too big we use gradient accumulation
gradient_accumulation_steps = 1
if batch_size > MAX_GPU_BATCH_SIZE and accelerator.distributed_type != DistributedType.TPU:
gradient_accumulation_steps = batch_size // MAX_GPU_BATCH_SIZE
batch_size = MAX_GPU_BATCH_SIZE
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
set_seed(seed)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs) // gradient_accumulation_steps,
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# We need to keep track of how many total steps we have iterated over
overall_step = 0
# We also need to keep track of the stating epoch so files are named properly
starting_epoch = 0
# Potentially load in the weights and states from a previous save
if args.resume_from_checkpoint:
if args.resume_from_checkpoint is not None or args.resume_from_checkpoint != "":
accelerator.print(f"Resumed from checkpoint: {args.resume_from_checkpoint}")
accelerator.load_state(args.resume_from_checkpoint)
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = [f.name for f in os.scandir(os.getcwd()) if f.is_dir()]
dirs.sort(key=os.path.getctime)
path = dirs[-1] # Sorts folders by date modified, most recent checkpoint is the last
# Extract `epoch_{i}` or `step_{i}`
training_difference = os.path.splitext(path)[0]
if "epoch" in training_difference:
starting_epoch = int(training_difference.replace("epoch_", "")) + 1
resume_step = None
else:
resume_step = int(training_difference.replace("step_", ""))
starting_epoch = resume_step // len(train_dataloader)
resume_step -= starting_epoch * len(train_dataloader)
# Now we train the model
for epoch in range(starting_epoch, num_epochs):
model.train()
if args.with_tracking:
total_loss = 0
if args.resume_from_checkpoint and epoch == starting_epoch and resume_step is not None:
# We need to skip steps until we reach the resumed step
active_dataloader = accelerator.skip_first_batches(train_dataloader, resume_step)
overall_step += resume_step
else:
# After the first iteration though, we need to go back to the original dataloader
active_dataloader = train_dataloader
for step, batch in enumerate(active_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
loss = loss / gradient_accumulation_steps
# We keep track of the loss at each epoch
if args.with_tracking:
total_loss += loss.detach().float()
accelerator.backward(loss)
if step % gradient_accumulation_steps == 0:
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
overall_step += 1
if isinstance(checkpointing_steps, int):
output_dir = f"step_{overall_step}"
if overall_step % checkpointing_steps == 0:
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
if args.with_tracking:
accelerator.log(
{
"accuracy": eval_metric["accuracy"],
"f1": eval_metric["f1"],
"train_loss": total_loss.item() / len(train_dataloader),
"epoch": epoch,
},
step=epoch,
)
if checkpointing_steps == "epoch":
output_dir = f"epoch_{epoch}"
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
if args.with_tracking:
accelerator.end_training()
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
parser.add_argument(
"--checkpointing_steps",
type=str,
default=None,
help="Whether the various states should be saved at the end of every n steps, or 'epoch' for each epoch.",
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help="If the training should continue from a checkpoint folder.",
)
parser.add_argument(
"--with_tracking",
action="store_true",
help="Whether to load in all available experiment trackers from the environment and use them for logging.",
)
parser.add_argument(
"--output_dir",
type=str,
default=".",
help="Optional save directory where all checkpoint folders will be stored. Default is the current working directory.",
)
parser.add_argument(
"--project_dir",
type=str,
default="logs",
help="Location on where to store experiment tracking logs` and relevent project information",
)
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/examples/multigpu_remote_launcher.py
|
import argparse
import runhouse as rh
import torch
from nlp_example import training_function
from accelerate.utils import PrepareForLaunch, patch_environment
def launch_train(*args):
num_processes = torch.cuda.device_count()
print(f"Device count: {num_processes}")
with patch_environment(
world_size=num_processes, master_addr="127.0.01", master_port="29500", mixed_precision=args[1].mixed_precision
):
launcher = PrepareForLaunch(training_function, distributed_type="MULTI_GPU")
torch.multiprocessing.start_processes(launcher, args=args, nprocs=num_processes, start_method="spawn")
if __name__ == "__main__":
# Refer to https://runhouse-docs.readthedocs-hosted.com/en/main/rh_primitives/cluster.html#hardware-setup
# for cloud access setup instructions (if using on-demand hardware), and for API specifications.
# on-demand GPU
# gpu = rh.cluster(name='rh-cluster', instance_type='V100:1', provider='cheapest', use_spot=False) # single GPU
gpu = rh.cluster(name="rh-cluster", instance_type="V100:4", provider="cheapest", use_spot=False) # multi GPU
gpu.up_if_not()
# on-prem GPU
# gpu = rh.cluster(
# ips=["ip_addr"], ssh_creds={ssh_user:"<username>", ssh_private_key:"<key_path>"}, name="rh-cluster"
# )
# Set up remote function
reqs = [
"pip:./",
"transformers",
"datasets",
"evaluate",
"tqdm",
"scipy",
"scikit-learn",
"tensorboard",
"torch --upgrade --extra-index-url https://download.pytorch.org/whl/cu117",
]
launch_train_gpu = rh.function(fn=launch_train, system=gpu, reqs=reqs, name="train_bert_glue")
# Define train args/config, run train function
train_args = argparse.Namespace(cpu=False, mixed_precision="fp16")
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
launch_train_gpu(config, train_args, stream_logs=True)
# Alternatively, we can just run as instructed in the README (but only because there's already a wrapper CLI):
# gpu.install_packages(reqs)
# gpu.run(['accelerate launch --multi_gpu accelerate/examples/nlp_example.py'])
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/examples/complete_cv_example.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import re
import numpy as np
import PIL
import torch
from timm import create_model
from torch.optim.lr_scheduler import OneCycleLR
from torch.utils.data import DataLoader, Dataset
from torchvision.transforms import Compose, RandomResizedCrop, Resize, ToTensor
from accelerate import Accelerator
########################################################################
# This is a fully working simple example to use Accelerate
#
# This example trains a ResNet50 on the Oxford-IIT Pet Dataset
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
# Function to get the label from the filename
def extract_label(fname):
stem = fname.split(os.path.sep)[-1]
return re.search(r"^(.*)_\d+\.jpg$", stem).groups()[0]
class PetsDataset(Dataset):
def __init__(self, file_names, image_transform=None, label_to_id=None):
self.file_names = file_names
self.image_transform = image_transform
self.label_to_id = label_to_id
def __len__(self):
return len(self.file_names)
def __getitem__(self, idx):
fname = self.file_names[idx]
raw_image = PIL.Image.open(fname)
image = raw_image.convert("RGB")
if self.image_transform is not None:
image = self.image_transform(image)
label = extract_label(fname)
if self.label_to_id is not None:
label = self.label_to_id[label]
return {"image": image, "label": label}
def training_function(config, args):
# Initialize accelerator
if args.with_tracking:
accelerator = Accelerator(
cpu=args.cpu, mixed_precision=args.mixed_precision, log_with="all", project_dir=args.project_dir
)
else:
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
image_size = config["image_size"]
if not isinstance(image_size, (list, tuple)):
image_size = (image_size, image_size)
# Parse out whether we are saving every epoch or after a certain number of batches
if hasattr(args.checkpointing_steps, "isdigit"):
if args.checkpointing_steps == "epoch":
checkpointing_steps = args.checkpointing_steps
elif args.checkpointing_steps.isdigit():
checkpointing_steps = int(args.checkpointing_steps)
else:
raise ValueError(
f"Argument `checkpointing_steps` must be either a number or `epoch`. `{args.checkpointing_steps}` passed."
)
else:
checkpointing_steps = None
# We need to initialize the trackers we use, and also store our configuration
if args.with_tracking:
run = os.path.split(__file__)[-1].split(".")[0]
accelerator.init_trackers(run, config)
# Grab all the image filenames
file_names = [os.path.join(args.data_dir, fname) for fname in os.listdir(args.data_dir) if fname.endswith(".jpg")]
# Build the label correspondences
all_labels = [extract_label(fname) for fname in file_names]
id_to_label = list(set(all_labels))
id_to_label.sort()
label_to_id = {lbl: i for i, lbl in enumerate(id_to_label)}
# Set the seed before splitting the data.
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
# Split our filenames between train and validation
random_perm = np.random.permutation(len(file_names))
cut = int(0.8 * len(file_names))
train_split = random_perm[:cut]
eval_split = random_perm[cut:]
# For training we use a simple RandomResizedCrop
train_tfm = Compose([RandomResizedCrop(image_size, scale=(0.5, 1.0)), ToTensor()])
train_dataset = PetsDataset(
[file_names[i] for i in train_split], image_transform=train_tfm, label_to_id=label_to_id
)
# For evaluation, we use a deterministic Resize
eval_tfm = Compose([Resize(image_size), ToTensor()])
eval_dataset = PetsDataset([file_names[i] for i in eval_split], image_transform=eval_tfm, label_to_id=label_to_id)
# Instantiate dataloaders.
train_dataloader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size, num_workers=4)
eval_dataloader = DataLoader(eval_dataset, shuffle=False, batch_size=batch_size, num_workers=4)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = create_model("resnet50d", pretrained=True, num_classes=len(label_to_id))
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Freezing the base model
for param in model.parameters():
param.requires_grad = False
for param in model.get_classifier().parameters():
param.requires_grad = True
# We normalize the batches of images to be a bit faster.
mean = torch.tensor(model.default_cfg["mean"])[None, :, None, None].to(accelerator.device)
std = torch.tensor(model.default_cfg["std"])[None, :, None, None].to(accelerator.device)
# Instantiate optimizer
optimizer = torch.optim.Adam(params=model.parameters(), lr=lr / 25)
# Instantiate learning rate scheduler
lr_scheduler = OneCycleLR(optimizer=optimizer, max_lr=lr, epochs=num_epochs, steps_per_epoch=len(train_dataloader))
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# We need to keep track of how many total steps we have iterated over
overall_step = 0
# We also need to keep track of the starting epoch so files are named properly
starting_epoch = 0
# Potentially load in the weights and states from a previous save
if args.resume_from_checkpoint:
if args.resume_from_checkpoint is not None or args.resume_from_checkpoint != "":
accelerator.print(f"Resumed from checkpoint: {args.resume_from_checkpoint}")
accelerator.load_state(args.resume_from_checkpoint)
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = [f.name for f in os.scandir(os.getcwd()) if f.is_dir()]
dirs.sort(key=os.path.getctime)
path = dirs[-1] # Sorts folders by date modified, most recent checkpoint is the last
# Extract `epoch_{i}` or `step_{i}`
training_difference = os.path.splitext(path)[0]
if "epoch" in training_difference:
starting_epoch = int(training_difference.replace("epoch_", "")) + 1
resume_step = None
else:
resume_step = int(training_difference.replace("step_", ""))
starting_epoch = resume_step // len(train_dataloader)
resume_step -= starting_epoch * len(train_dataloader)
# Now we train the model
for epoch in range(starting_epoch, num_epochs):
model.train()
if args.with_tracking:
total_loss = 0
if args.resume_from_checkpoint and epoch == starting_epoch and resume_step is not None:
# We need to skip steps until we reach the resumed step
active_dataloader = accelerator.skip_first_batches(train_dataloader, resume_step)
overall_step += resume_step
else:
# After the first iteration though, we need to go back to the original dataloader
active_dataloader = train_dataloader
for batch in active_dataloader:
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch = {k: v.to(accelerator.device) for k, v in batch.items()}
inputs = (batch["image"] - mean) / std
outputs = model(inputs)
loss = torch.nn.functional.cross_entropy(outputs, batch["label"])
# We keep track of the loss at each epoch
if args.with_tracking:
total_loss += loss.detach().float()
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
overall_step += 1
if isinstance(checkpointing_steps, int):
output_dir = f"step_{overall_step}"
if overall_step % checkpointing_steps == 0:
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
model.eval()
accurate = 0
num_elems = 0
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch = {k: v.to(accelerator.device) for k, v in batch.items()}
inputs = (batch["image"] - mean) / std
with torch.no_grad():
outputs = model(inputs)
predictions = outputs.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["label"]))
accurate_preds = predictions == references
num_elems += accurate_preds.shape[0]
accurate += accurate_preds.long().sum()
eval_metric = accurate.item() / num_elems
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}: {100 * eval_metric:.2f}")
if args.with_tracking:
accelerator.log(
{
"accuracy": 100 * eval_metric,
"train_loss": total_loss.item() / len(train_dataloader),
"epoch": epoch,
},
step=overall_step,
)
if checkpointing_steps == "epoch":
output_dir = f"epoch_{epoch}"
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
if args.with_tracking:
accelerator.end_training()
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument("--data_dir", required=True, help="The data folder on disk.")
parser.add_argument("--fp16", action="store_true", help="If passed, will use FP16 training.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
parser.add_argument(
"--checkpointing_steps",
type=str,
default=None,
help="Whether the various states should be saved at the end of every n steps, or 'epoch' for each epoch.",
)
parser.add_argument(
"--output_dir",
type=str,
default=".",
help="Optional save directory where all checkpoint folders will be stored. Default is the current working directory.",
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help="If the training should continue from a checkpoint folder.",
)
parser.add_argument(
"--with_tracking",
action="store_true",
help="Whether to load in all available experiment trackers from the environment and use them for logging.",
)
parser.add_argument(
"--project_dir",
type=str,
default="logs",
help="Location on where to store experiment tracking logs` and relevent project information",
)
args = parser.parse_args()
config = {"lr": 3e-2, "num_epochs": 3, "seed": 42, "batch_size": 64, "image_size": 224}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/examples/nlp_example.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
########################################################################
# This is a fully working simple example to use Accelerate
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size, drop_last=True
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"],
shuffle=False,
collate_fn=collate_fn,
batch_size=EVAL_BATCH_SIZE,
drop_last=(accelerator.mixed_precision == "fp8"),
)
return train_dataloader, eval_dataloader
def training_function(config, args):
# Initialize accelerator
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
metric = evaluate.load("glue", "mrpc")
# If the batch size is too big we use gradient accumulation
gradient_accumulation_steps = 1
if batch_size > MAX_GPU_BATCH_SIZE and accelerator.distributed_type != DistributedType.TPU:
gradient_accumulation_steps = batch_size // MAX_GPU_BATCH_SIZE
batch_size = MAX_GPU_BATCH_SIZE
set_seed(seed)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs) // gradient_accumulation_steps,
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
loss = loss / gradient_accumulation_steps
accelerator.backward(loss)
if step % gradient_accumulation_steps == 0:
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/README.md
|
# What are these scripts?
All scripts in this folder originate from the `nlp_example.py` file, as it is a very simplistic NLP training example using Accelerate with zero extra features.
From there, each further script adds in just **one** feature of Accelerate, showing how you can quickly modify your own scripts to implement these capabilities.
A full example with all of these parts integrated together can be found in the `complete_nlp_example.py` script and `complete_cv_example.py` script.
Adjustments to each script from the base `nlp_example.py` file can be found quickly by searching for "# New Code #"
## Example Scripts by Feature and their Arguments
### Base Example (`../nlp_example.py`)
- Shows how to use `Accelerator` in an extremely simplistic PyTorch training loop
- Arguments available:
- `mixed_precision`, whether to use mixed precision. ("no", "fp16", or "bf16")
- `cpu`, whether to train using only the CPU. (yes/no/1/0)
All following scripts also accept these arguments in addition to their added ones.
These arguments should be added at the end of any method for starting the python script (such as `python`, `accelerate launch`, `python -m torch.distributed.run`), such as:
```bash
accelerate launch ../nlp_example.py --mixed_precision fp16 --cpu 0
```
### Checkpointing and Resuming Training (`checkpointing.py`)
- Shows how to use `Accelerator.save_state` and `Accelerator.load_state` to save or continue training
- **It is assumed you are continuing off the same training script**
- Arguments available:
- `checkpointing_steps`, after how many steps the various states should be saved. ("epoch", 1, 2, ...)
- `output_dir`, where saved state folders should be saved to, default is current working directory
- `resume_from_checkpoint`, what checkpoint folder to resume from. ("epoch_0", "step_22", ...)
These arguments should be added at the end of any method for starting the python script (such as `python`, `accelerate launch`, `python -m torchrun`), such as:
(Note, `resume_from_checkpoint` assumes that we've ran the script for one epoch with the `--checkpointing_steps epoch` flag)
```bash
accelerate launch ./checkpointing.py --checkpointing_steps epoch output_dir "checkpointing_tutorial" --resume_from_checkpoint "checkpointing_tutorial/epoch_0"
```
### Cross Validation (`cross_validation.py`)
- Shows how to use `Accelerator.free_memory` and run cross validation efficiently with `datasets`.
- Arguments available:
- `num_folds`, the number of folds the training dataset should be split into.
These arguments should be added at the end of any method for starting the python script (such as `python`, `accelerate launch`, `python -m torchrun`), such as:
```bash
accelerate launch ./cross_validation.py --num_folds 2
```
### Experiment Tracking (`tracking.py`)
- Shows how to use `Accelerate.init_trackers` and `Accelerator.log`
- Can be used with Weights and Biases, TensorBoard, or CometML.
- Arguments available:
- `with_tracking`, whether to load in all available experiment trackers from the environment.
These arguments should be added at the end of any method for starting the python script (such as `python`, `accelerate launch`, `python -m torchrun`), such as:
```bash
accelerate launch ./tracking.py --with_tracking
```
### Gradient Accumulation (`gradient_accumulation.py`)
- Shows how to use `Accelerator.no_sync` to prevent gradient averaging in a distributed setup.
- Arguments available:
- `gradient_accumulation_steps`, the number of steps to perform before the gradients are accumulated and the optimizer and scheduler are stepped + zero_grad
These arguments should be added at the end of any method for starting the python script (such as `python`, `accelerate launch`, `python -m torchrun`), such as:
```bash
accelerate launch ./gradient_accumulation.py --gradient_accumulation_steps 5
```
### LocalSGD (`local_sgd.py`)
- Shows how to use `Accelerator.no_sync` to prevent gradient averaging in a distributed setup. However, unlike gradient accumulation, this method does not change the effective batch size. Local SGD can be combined with gradient accumulation.
These arguments should be added at the end of any method for starting the python script (such as `python`, `accelerate launch`, `python -m torchrun`), such as:
```bash
accelerate launch ./local_sgd.py --local_sgd_steps 4
```
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/gradient_accumulation.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
########################################################################
# This is a fully working simple example to use Accelerate
# and perform gradient accumulation
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# New Code #
gradient_accumulation_steps = int(args.gradient_accumulation_steps)
# Initialize accelerator
accelerator = Accelerator(
cpu=args.cpu, mixed_precision=args.mixed_precision, gradient_accumulation_steps=gradient_accumulation_steps
)
if accelerator.distributed_type == DistributedType.TPU and gradient_accumulation_steps > 1:
raise NotImplementedError(
"Gradient accumulation on TPUs is currently not supported. Pass `gradient_accumulation_steps=1`"
)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
metric = evaluate.load("glue", "mrpc")
set_seed(seed)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs),
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
# New code #
# We use the new `accumulate` context manager to perform gradient accumulation
# We also currently do not support TPUs nor advise it as bugs were found on the XLA side when running our tests.
with accelerator.accumulate(model):
output = model(**batch)
loss = output.loss
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
# New Code #
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="The number of minibatches to be ran before gradients are accumulated.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/memory.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
# New Code #
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
from accelerate.utils import find_executable_batch_size
########################################################################
# This is a fully working simple example to use Accelerate,
# specifically showcasing how to ensure out-of-memory errors never
# interrupt training, and builds off the `nlp_example.py` script.
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# New additions from the base script can be found quickly by
# looking for the # New Code # tags
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# Initialize accelerator
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
metric = evaluate.load("glue", "mrpc")
# New Code #
# We now can define an inner training loop function. It should take a batch size as the only parameter,
# and build the dataloaders in there.
# It also gets our decorator
@find_executable_batch_size(starting_batch_size=batch_size)
def inner_training_loop(batch_size):
# And now just move everything below under this function
# We need to bring in the Accelerator object from earlier
nonlocal accelerator
# And reset all of its attributes that could hold onto any memory:
accelerator.free_memory()
# Then we can declare the model, optimizer, and everything else:
set_seed(seed)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs),
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
# New Code #
# And call it at the end with no arguments
# Note: You could also refactor this outside of your training loop function
inner_training_loop()
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/cross_validation.py
|
# coding=utf-8
# Copyright 2022 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
from typing import List
import evaluate
import numpy as np
import torch
from datasets import DatasetDict, load_dataset
# New Code #
# We'll be using StratifiedKFold for this example
from sklearn.model_selection import StratifiedKFold
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
########################################################################
# This is a fully working simple example to use Accelerate,
# specifically showcasing how to perform Cross Validation,
# and builds off the `nlp_example.py` script.
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To help focus on the differences in the code, building `DataLoaders`
# was refactored into its own function.
# New additions from the base script can be found quickly by
# looking for the # New Code # tags
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
# New Code #
# We need a different `get_dataloaders` function that will build dataloaders by index
def get_fold_dataloaders(
accelerator: Accelerator, dataset: DatasetDict, train_idxs: List[int], valid_idxs: List[int], batch_size: int = 16
):
"""
Gets a set of train, valid, and test dataloaders for a particular fold
Args:
accelerator (`Accelerator`):
The main `Accelerator` object
train_idxs (list of `int`):
The split indices for the training dataset
valid_idxs (list of `int`):
The split indices for the validation dataset
batch_size (`int`):
The size of the minibatch. Default is 16
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = DatasetDict(
{
"train": dataset["train"].select(train_idxs),
"validation": dataset["train"].select(valid_idxs),
"test": dataset["validation"],
}
)
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
test_dataloader = DataLoader(
tokenized_datasets["test"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader, test_dataloader
def training_function(config, args):
# New Code #
test_predictions = []
# Download the dataset
datasets = load_dataset("glue", "mrpc")
# Create our splits
kfold = StratifiedKFold(n_splits=int(args.num_folds))
# Initialize accelerator
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
metric = evaluate.load("glue", "mrpc")
# If the batch size is too big we use gradient accumulation
gradient_accumulation_steps = 1
if batch_size > MAX_GPU_BATCH_SIZE and accelerator.distributed_type != DistributedType.TPU:
gradient_accumulation_steps = batch_size // MAX_GPU_BATCH_SIZE
batch_size = MAX_GPU_BATCH_SIZE
set_seed(seed)
# New Code #
# Create our folds:
folds = kfold.split(np.zeros(datasets["train"].num_rows), datasets["train"]["label"])
test_references = []
# Iterate over them
for i, (train_idxs, valid_idxs) in enumerate(folds):
train_dataloader, eval_dataloader, test_dataloader = get_fold_dataloaders(
accelerator,
datasets,
train_idxs,
valid_idxs,
)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs) // gradient_accumulation_steps,
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
loss = loss / gradient_accumulation_steps
accelerator.backward(loss)
if step % gradient_accumulation_steps == 0:
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
# New Code #
# We also run predictions on the test set at the very end
fold_predictions = []
for step, batch in enumerate(test_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
fold_predictions.append(predictions.cpu())
if i == 0:
# We need all of the test predictions
test_references.append(references.cpu())
# Use accelerator.print to print only on the main process.
test_predictions.append(torch.cat(fold_predictions, dim=0))
# We now need to release all our memory and get rid of the current model, optimizer, etc
accelerator.free_memory()
# New Code #
# Finally we check the accuracy of our folded results:
test_references = torch.cat(test_references, dim=0)
preds = torch.stack(test_predictions, dim=0).sum(dim=0).div(int(args.num_folds)).argmax(dim=-1)
test_metric = metric.compute(predictions=preds, references=test_references)
accelerator.print("Average test metrics from all folds:", test_metric)
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
# New Code #
parser.add_argument("--num_folds", type=int, default=3, help="The number of splits to perform across the dataset")
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/automatic_gradient_accumulation.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
# New Code #
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator
from accelerate.utils import find_executable_batch_size
########################################################################
# This is a fully working simple example to use Accelerate,
# specifically showcasing how to combine both the gradient accumulation
# and automatic batch size finder utilities of Accelerate to perfrom
# automatic gradient accumulation
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# New additions from the base script can be found quickly by
# looking for the # New Code # tags
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# Initialize accelerator
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
observed_batch_size = int(config["batch_size"])
metric = evaluate.load("glue", "mrpc")
# New Code #
# We use the `find_executable_batch_size` decorator, passing in the desired observed batch size
# to train on. If a CUDA OOM error occurs, it will retry this loop cutting the batch size in
# half each time. From this, we can calculate the number of gradient accumulation steps needed
# and modify the Accelerator object as a result
@find_executable_batch_size(starting_batch_size=int(observed_batch_size))
def inner_training_loop(batch_size):
# Since we need to modify the outside accelerator object, we need to bring it
# to the local scope
nonlocal accelerator
# We can calculate the number of gradient accumulation steps based on the current
# batch size vs the starting batch size
num_gradient_accumulation_steps = observed_batch_size // batch_size
# And then set it in the Accelerator directly:
accelerator.gradient_accumulation_steps = num_gradient_accumulation_steps
# Next we need to free all of the stored model references in the Accelerator each time
accelerator.free_memory()
# And set the seed so our results are reproducable each reset
set_seed(seed)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs),
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
# And perform gradient accumulation
with accelerator.accumulate(model):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
# New Code #
# And call it at the end with no arguments
# Note: You could also refactor this outside of your training loop function
inner_training_loop()
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
args = parser.parse_args()
# New Code #
# We modify the starting batch size to be an observed batch size of 256, to guarentee an initial CUDA OOM
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 256}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/deepspeed_with_config_support.py
|
#!/usr/bin/env python
# coding=utf-8
# Copyright 2022 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
Fine-tuning the library models for causal language modeling (GPT, GPT-2, CTRL, ...)
on a text file or a dataset without using HuggingFace Trainer.
Here is the full list of checkpoints on the hub that can be fine-tuned by this script:
https://huggingface.co/models?filter=text-generation
"""
# You can also adapt this script on your own causal language modeling task. Pointers for this are left as comments.
import argparse
import json
import logging
import math
import os
import random
from itertools import chain
from pathlib import Path
import datasets
import torch
import transformers
from datasets import load_dataset
from huggingface_hub import Repository
from torch.utils.data import DataLoader
from tqdm.auto import tqdm
from transformers import (
CONFIG_MAPPING,
MODEL_MAPPING,
AutoConfig,
AutoModelForCausalLM,
AutoTokenizer,
SchedulerType,
default_data_collator,
get_scheduler,
)
from transformers.utils import get_full_repo_name
from transformers.utils.versions import require_version
from accelerate import Accelerator, DistributedType
from accelerate.logging import get_logger
from accelerate.utils import DummyOptim, DummyScheduler, set_seed
logger = get_logger(__name__)
require_version("datasets>=1.8.0", "To fix: pip install -r examples/pytorch/language-modeling/requirements.txt")
MODEL_CONFIG_CLASSES = list(MODEL_MAPPING.keys())
MODEL_TYPES = tuple(conf.model_type for conf in MODEL_CONFIG_CLASSES)
def parse_args():
parser = argparse.ArgumentParser(description="Finetune a transformers model on a causal language modeling task")
parser.add_argument(
"--dataset_name",
type=str,
default=None,
help="The name of the dataset to use (via the datasets library).",
)
parser.add_argument(
"--dataset_config_name",
type=str,
default=None,
help="The configuration name of the dataset to use (via the datasets library).",
)
parser.add_argument(
"--train_file", type=str, default=None, help="A csv or a json file containing the training data."
)
parser.add_argument(
"--validation_file", type=str, default=None, help="A csv or a json file containing the validation data."
)
parser.add_argument(
"--validation_split_percentage",
default=5,
help="The percentage of the train set used as validation set in case there's no validation split",
)
parser.add_argument(
"--model_name_or_path",
type=str,
help="Path to pretrained model or model identifier from huggingface.co/models.",
required=False,
)
parser.add_argument(
"--config_name",
type=str,
default=None,
help="Pretrained config name or path if not the same as model_name",
)
parser.add_argument(
"--tokenizer_name",
type=str,
default=None,
help="Pretrained tokenizer name or path if not the same as model_name",
)
parser.add_argument(
"--use_slow_tokenizer",
action="store_true",
help="If passed, will use a slow tokenizer (not backed by the 🤗 Tokenizers library).",
)
parser.add_argument(
"--per_device_train_batch_size",
type=int,
default=8,
help="Batch size (per device) for the training dataloader.",
)
parser.add_argument(
"--per_device_eval_batch_size",
type=int,
default=8,
help="Batch size (per device) for the evaluation dataloader.",
)
parser.add_argument(
"--learning_rate",
type=float,
default=5e-5,
help="Initial learning rate (after the potential warmup period) to use.",
)
parser.add_argument("--weight_decay", type=float, default=0.0, help="Weight decay to use.")
parser.add_argument("--num_train_epochs", type=int, default=3, help="Total number of training epochs to perform.")
parser.add_argument(
"--max_train_steps",
type=int,
default=None,
help="Total number of training steps to perform. If provided, overrides num_train_epochs.",
)
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="Number of updates steps to accumulate before performing a backward/update pass.",
)
parser.add_argument(
"--lr_scheduler_type",
type=SchedulerType,
default="linear",
help="The scheduler type to use.",
choices=["linear", "cosine", "cosine_with_restarts", "polynomial", "constant", "constant_with_warmup"],
)
parser.add_argument(
"--num_warmup_steps", type=int, default=0, help="Number of steps for the warmup in the lr scheduler."
)
parser.add_argument("--output_dir", type=str, default=None, help="Where to store the final model.")
parser.add_argument("--seed", type=int, default=None, help="A seed for reproducible training.")
parser.add_argument(
"--model_type",
type=str,
default=None,
help="Model type to use if training from scratch.",
choices=MODEL_TYPES,
)
parser.add_argument(
"--block_size",
type=int,
default=None,
help=(
"Optional input sequence length after tokenization. The training dataset will be truncated in block of"
" this size for training. Default to the model max input length for single sentence inputs (take into"
" account special tokens)."
),
)
parser.add_argument(
"--preprocessing_num_workers",
type=int,
default=None,
help="The number of processes to use for the preprocessing.",
)
parser.add_argument(
"--overwrite_cache", type=bool, default=False, help="Overwrite the cached training and evaluation sets"
)
parser.add_argument(
"--no_keep_linebreaks", action="store_true", help="Do not keep line breaks when using TXT files."
)
parser.add_argument("--push_to_hub", action="store_true", help="Whether or not to push the model to the Hub.")
parser.add_argument(
"--hub_model_id", type=str, help="The name of the repository to keep in sync with the local `output_dir`."
)
parser.add_argument("--hub_token", type=str, help="The token to use to push to the Model Hub.")
parser.add_argument(
"--checkpointing_steps",
type=str,
default=None,
help="Whether the various states should be saved at the end of every n steps, or 'epoch' for each epoch.",
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help="If the training should continue from a checkpoint folder.",
)
# New Code #
# Whether to load the best model at the end of training
parser.add_argument(
"--load_best_model",
action="store_true",
help="Whether to load the best model at the end of training",
)
parser.add_argument(
"--with_tracking",
action="store_true",
help="Whether to enable experiment trackers for logging.",
)
parser.add_argument(
"--report_to",
type=str,
default="all",
help=(
'The integration to report the results and logs to. Supported platforms are `"tensorboard"`,'
' `"wandb"` and `"comet_ml"`. Use `"all"` (default) to report to all integrations.'
"Only applicable when `--with_tracking` is passed."
),
)
args = parser.parse_args()
# Sanity checks
if args.dataset_name is None and args.train_file is None and args.validation_file is None:
raise ValueError("Need either a dataset name or a training/validation file.")
else:
if args.train_file is not None:
extension = args.train_file.split(".")[-1]
assert extension in ["csv", "json", "txt"], "`train_file` should be a csv, json or txt file."
if args.validation_file is not None:
extension = args.validation_file.split(".")[-1]
assert extension in ["csv", "json", "txt"], "`validation_file` should be a csv, json or txt file."
if args.push_to_hub:
assert args.output_dir is not None, "Need an `output_dir` to create a repo when `--push_to_hub` is passed."
return args
# New Code #
def evaluate(args, model, eval_dataloader, accelerator, eval_dataset):
model.eval()
losses = []
for step, batch in enumerate(eval_dataloader):
with torch.no_grad():
outputs = model(**batch)
loss = outputs.loss
losses.append(accelerator.gather_for_metrics(loss.repeat(args.per_device_eval_batch_size)))
losses = torch.cat(losses)
try:
eval_loss = torch.mean(losses)
perplexity = math.exp(eval_loss)
except OverflowError:
perplexity = float("inf")
return perplexity, eval_loss
def main():
args = parse_args()
# Initialize the accelerator. We will let the accelerator handle device placement for us in this example.
# If we're using tracking, we also need to initialize it here and it will by default pick up all supported trackers
# in the environment
# when using DeepSpeed, the `gradient_accumulation_steps` is properly set from the DeepSpeed plugin/config
# or from `accelerate launch` via `--gradient_accumulation_steps` else
# defaulting to the passed `args.gradient_accumulation_steps`
accelerator = (
Accelerator(
log_with=args.report_to,
project_dir=args.output_dir,
gradient_accumulation_steps=args.gradient_accumulation_steps,
)
if args.with_tracking
else Accelerator(gradient_accumulation_steps=args.gradient_accumulation_steps)
)
# Make one log on every process with the configuration for debugging.
logging.basicConfig(
format="%(asctime)s - %(levelname)s - %(name)s - %(message)s",
datefmt="%m/%d/%Y %H:%M:%S",
level=logging.INFO,
)
logger.info(accelerator.state, main_process_only=False)
if accelerator.is_local_main_process:
datasets.utils.logging.set_verbosity_warning()
transformers.utils.logging.set_verbosity_info()
else:
datasets.utils.logging.set_verbosity_error()
transformers.utils.logging.set_verbosity_error()
# If passed along, set the training seed now.
if args.seed is not None:
set_seed(args.seed)
# Handle the repository creation
if accelerator.is_main_process:
if args.push_to_hub:
if args.hub_model_id is None:
repo_name = get_full_repo_name(Path(args.output_dir).name, token=args.hub_token)
else:
repo_name = args.hub_model_id
repo = Repository(args.output_dir, clone_from=repo_name)
with open(os.path.join(args.output_dir, ".gitignore"), "w+") as gitignore:
if "step_*" not in gitignore:
gitignore.write("step_*\n")
if "epoch_*" not in gitignore:
gitignore.write("epoch_*\n")
elif args.output_dir is not None:
os.makedirs(args.output_dir, exist_ok=True)
accelerator.wait_for_everyone()
# Get the datasets: you can either provide your own CSV/JSON/TXT training and evaluation files (see below)
# or just provide the name of one of the public datasets available on the hub at https://huggingface.co/datasets/
# (the dataset will be downloaded automatically from the datasets Hub).
#
# For CSV/JSON files, this script will use the column called 'text' or the first column if no column called
# 'text' is found. You can easily tweak this behavior (see below).
#
# In distributed training, the load_dataset function guarantee that only one local process can concurrently
# download the dataset.
if args.dataset_name is not None:
# Downloading and loading a dataset from the hub.
raw_datasets = load_dataset(args.dataset_name, args.dataset_config_name)
if "validation" not in raw_datasets.keys():
raw_datasets["validation"] = load_dataset(
args.dataset_name,
args.dataset_config_name,
split=f"train[:{args.validation_split_percentage}%]",
)
raw_datasets["train"] = load_dataset(
args.dataset_name,
args.dataset_config_name,
split=f"train[{args.validation_split_percentage}%:]",
)
else:
data_files = {}
dataset_args = {}
if args.train_file is not None:
data_files["train"] = args.train_file
if args.validation_file is not None:
data_files["validation"] = args.validation_file
extension = args.train_file.split(".")[-1]
if extension == "txt":
extension = "text"
dataset_args["keep_linebreaks"] = not args.no_keep_linebreaks
raw_datasets = load_dataset(extension, data_files=data_files, **dataset_args)
# If no validation data is there, validation_split_percentage will be used to divide the dataset.
if "validation" not in raw_datasets.keys():
raw_datasets["validation"] = load_dataset(
extension,
data_files=data_files,
split=f"train[:{args.validation_split_percentage}%]",
**dataset_args,
)
raw_datasets["train"] = load_dataset(
extension,
data_files=data_files,
split=f"train[{args.validation_split_percentage}%:]",
**dataset_args,
)
# See more about loading any type of standard or custom dataset (from files, python dict, pandas DataFrame, etc) at
# https://huggingface.co/docs/datasets/loading_datasets.html.
# Load pretrained model and tokenizer
#
# In distributed training, the .from_pretrained methods guarantee that only one local process can concurrently
# download model & vocab.
if args.config_name:
config = AutoConfig.from_pretrained(args.config_name)
elif args.model_name_or_path:
config = AutoConfig.from_pretrained(args.model_name_or_path)
else:
config = CONFIG_MAPPING[args.model_type]()
logger.warning("You are instantiating a new config instance from scratch.")
if args.tokenizer_name:
tokenizer = AutoTokenizer.from_pretrained(args.tokenizer_name, use_fast=not args.use_slow_tokenizer)
elif args.model_name_or_path:
tokenizer = AutoTokenizer.from_pretrained(args.model_name_or_path, use_fast=not args.use_slow_tokenizer)
else:
raise ValueError(
"You are instantiating a new tokenizer from scratch. This is not supported by this script."
"You can do it from another script, save it, and load it from here, using --tokenizer_name."
)
if args.model_name_or_path:
model = AutoModelForCausalLM.from_pretrained(
args.model_name_or_path,
from_tf=bool(".ckpt" in args.model_name_or_path),
config=config,
)
else:
logger.info("Training new model from scratch")
model = AutoModelForCausalLM.from_config(config)
model.resize_token_embeddings(len(tokenizer))
# Preprocessing the datasets.
# First we tokenize all the texts.
column_names = raw_datasets["train"].column_names
text_column_name = "text" if "text" in column_names else column_names[0]
def tokenize_function(examples):
return tokenizer(examples[text_column_name])
with accelerator.main_process_first():
tokenized_datasets = raw_datasets.map(
tokenize_function,
batched=True,
num_proc=args.preprocessing_num_workers,
remove_columns=column_names,
load_from_cache_file=not args.overwrite_cache,
desc="Running tokenizer on dataset",
)
if args.block_size is None:
block_size = tokenizer.model_max_length
if block_size > 1024:
logger.warning(
f"The tokenizer picked seems to have a very large `model_max_length` ({tokenizer.model_max_length}). "
"Picking 1024 instead. You can change that default value by passing --block_size xxx."
)
block_size = 1024
else:
if args.block_size > tokenizer.model_max_length:
logger.warning(
f"The block_size passed ({args.block_size}) is larger than the maximum length for the model"
f"({tokenizer.model_max_length}). Using block_size={tokenizer.model_max_length}."
)
block_size = min(args.block_size, tokenizer.model_max_length)
# Main data processing function that will concatenate all texts from our dataset and generate chunks of block_size.
def group_texts(examples):
# Concatenate all texts.
concatenated_examples = {k: list(chain(*examples[k])) for k in examples.keys()}
total_length = len(concatenated_examples[list(examples.keys())[0]])
# We drop the small remainder, we could add padding if the model supported it instead of this drop, you can
# customize this part to your needs.
if total_length >= block_size:
total_length = (total_length // block_size) * block_size
# Split by chunks of max_len.
result = {
k: [t[i : i + block_size] for i in range(0, total_length, block_size)]
for k, t in concatenated_examples.items()
}
result["labels"] = result["input_ids"].copy()
return result
# Note that with `batched=True`, this map processes 1,000 texts together, so group_texts throws away a remainder
# for each of those groups of 1,000 texts. You can adjust that batch_size here but a higher value might be slower
# to preprocess.
#
# To speed up this part, we use multiprocessing. See the documentation of the map method for more information:
# https://huggingface.co/docs/datasets/package_reference/main_classes.html#datasets.Dataset.map
with accelerator.main_process_first():
lm_datasets = tokenized_datasets.map(
group_texts,
batched=True,
num_proc=args.preprocessing_num_workers,
load_from_cache_file=not args.overwrite_cache,
desc=f"Grouping texts in chunks of {block_size}",
)
train_dataset = lm_datasets["train"]
eval_dataset = lm_datasets["validation"]
# Log a few random samples from the training set:
for index in random.sample(range(len(train_dataset)), 3):
logger.info(f"Sample {index} of the training set: {train_dataset[index]}.")
# DataLoaders creation:
train_dataloader = DataLoader(
train_dataset, shuffle=True, collate_fn=default_data_collator, batch_size=args.per_device_train_batch_size
)
eval_dataloader = DataLoader(
eval_dataset, collate_fn=default_data_collator, batch_size=args.per_device_eval_batch_size
)
# Optimizer
# Split weights in two groups, one with weight decay and the other not.
no_decay = ["bias", "LayerNorm.weight"]
optimizer_grouped_parameters = [
{
"params": [p for n, p in model.named_parameters() if not any(nd in n for nd in no_decay)],
"weight_decay": args.weight_decay,
},
{
"params": [p for n, p in model.named_parameters() if any(nd in n for nd in no_decay)],
"weight_decay": 0.0,
},
]
# New Code #
# Creates Dummy Optimizer if `optimizer` was specified in the config file else creates Adam Optimizer
optimizer_cls = (
torch.optim.AdamW
if accelerator.state.deepspeed_plugin is None
or "optimizer" not in accelerator.state.deepspeed_plugin.deepspeed_config
else DummyOptim
)
optimizer = optimizer_cls(optimizer_grouped_parameters, lr=args.learning_rate)
# On TPU, the tie weights in our model have been disconnected, so we need to restore the ties.
if accelerator.distributed_type == DistributedType.TPU:
model.tie_weights()
# Scheduler and math around the number of training steps.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / accelerator.gradient_accumulation_steps)
overrode_max_train_steps = False
if args.max_train_steps is None:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
overrode_max_train_steps = True
else:
args.num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# New Code #
# Creates Dummy Scheduler if `scheduler` was specified in the config file else creates `args.lr_scheduler_type` Scheduler
if (
accelerator.state.deepspeed_plugin is None
or "scheduler" not in accelerator.state.deepspeed_plugin.deepspeed_config
):
lr_scheduler = get_scheduler(
name=args.lr_scheduler_type,
optimizer=optimizer,
num_warmup_steps=args.num_warmup_steps,
num_training_steps=args.max_train_steps,
)
else:
lr_scheduler = DummyScheduler(
optimizer, total_num_steps=args.max_train_steps, warmup_num_steps=args.num_warmup_steps
)
# Prepare everything with our `accelerator`.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# We need to recalculate our total training steps as the size of the training dataloader may have changed.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / accelerator.gradient_accumulation_steps)
if overrode_max_train_steps:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
# Afterwards we recalculate our number of training epochs
args.num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# Figure out how many steps we should save the Accelerator states
checkpointing_steps = args.checkpointing_steps
if checkpointing_steps is not None and checkpointing_steps.isdigit():
checkpointing_steps = int(checkpointing_steps)
# We need to initialize the trackers we use, and also store our configuration.
# The trackers initializes automatically on the main process.
if args.with_tracking:
experiment_config = vars(args)
# TensorBoard cannot log Enums, need the raw value
experiment_config["lr_scheduler_type"] = experiment_config["lr_scheduler_type"].value
accelerator.init_trackers("clm_no_trainer", experiment_config)
# Train!
total_batch_size = (
args.per_device_train_batch_size * accelerator.num_processes * accelerator.gradient_accumulation_steps
)
logger.info("***** Running training *****")
logger.info(f" Num examples = {len(train_dataset)}")
logger.info(f" Num Epochs = {args.num_train_epochs}")
logger.info(f" Instantaneous batch size per device = {args.per_device_train_batch_size}")
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_batch_size}")
logger.info(f" Gradient Accumulation steps = {accelerator.gradient_accumulation_steps}")
logger.info(f" Total optimization steps = {args.max_train_steps}")
# Only show the progress bar once on each machine.
progress_bar = tqdm(range(args.max_train_steps), disable=not accelerator.is_local_main_process)
completed_steps = 0
starting_epoch = 0
best_metric = None
best_metric_checkpoint = None
# Potentially load in the weights and states from a previous save
if args.resume_from_checkpoint:
accelerator.load_state(args.resume_from_checkpoint)
accelerator.print(f"Resumed from checkpoint: {args.resume_from_checkpoint}")
path = os.path.basename(args.resume_from_checkpoint)
training_difference = os.path.splitext(path)[0]
if "epoch" in training_difference:
starting_epoch = int(training_difference.replace("epoch_", "")) + 1
resume_step = None
completed_steps = starting_epoch * num_update_steps_per_epoch
else:
resume_step = int(training_difference.replace("step_", ""))
starting_epoch = resume_step // num_update_steps_per_epoch
resume_step -= starting_epoch * num_update_steps_per_epoch
completed_steps = resume_step
for epoch in range(starting_epoch, args.num_train_epochs):
model.train()
if args.with_tracking:
total_loss = 0
# skip new `skip_first_batches` to skip the batches when resuming from ckpt
if args.resume_from_checkpoint:
train_dataloader = accelerator.skip_first_batches(train_dataloader, num_batches=resume_step)
for step, batch in enumerate(train_dataloader):
# In particular, DeepSpeed handles `gradient_accumulation` via `DeepSpeedEngine`.
# Below, we use `accelerator.accumulate` if the user
# wants to switch to other approaches such as plain DDP, PyTorch FSDP ...
# This avoids having to change any code as things are all handled across different distributed setups.
with accelerator.accumulate(model):
outputs = model(**batch)
loss = outputs.loss
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
if accelerator.sync_gradients:
progress_bar.update(1)
completed_steps += 1
# We keep track of the loss at each epoch
if args.with_tracking:
step_loss = accelerator.reduce(loss.detach().clone()).item()
total_loss += step_loss
if isinstance(checkpointing_steps, int):
if completed_steps % checkpointing_steps == 0:
output_dir = f"step_{completed_steps}"
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
if completed_steps >= args.max_train_steps:
break
perplexity, eval_loss = evaluate(args, model, eval_dataloader, accelerator, eval_dataset)
logger.info(f"epoch {epoch}: perplexity: {perplexity} eval_loss: {eval_loss}")
if args.with_tracking:
accelerator.log(
{
"perplexity": perplexity,
"eval_loss": eval_loss,
"train_loss": total_loss / len(train_dataloader),
"epoch": epoch,
"step": completed_steps,
},
step=completed_steps,
)
if isinstance(checkpointing_steps, str) and checkpointing_steps == "epoch":
accelerator.save_state(os.path.join(args.output_dir, f"epoch_{epoch}"))
# New Code #
# Tracks the best checkpoint and best metric
if best_metric is None or best_metric > perplexity:
best_metric = perplexity
best_metric_checkpoint = os.path.join(args.output_dir, "best_checkpoint")
accelerator.save_state(best_metric_checkpoint)
accelerator.print(f"New best metric: {best_metric} at epoch {epoch}")
accelerator.print(f"best_metric_checkpoint: {best_metric_checkpoint}")
# New Code #
# Loads the best checkpoint after the training is finished
if args.load_best_model:
accelerator.load_state(best_metric_checkpoint)
# New Code #
# Evaluates using the best checkpoint
perplexity, eval_loss = evaluate(args, model, eval_dataloader, accelerator, eval_dataset)
logger.info(f"Best model metrics: perplexity: {perplexity} eval_loss: {eval_loss}")
if perplexity != best_metric:
raise AssertionError(
f"Best metric {best_metric} does not match the metric {perplexity} of the loaded best model."
)
if args.output_dir is not None:
accelerator.wait_for_everyone()
unwrapped_model = accelerator.unwrap_model(model)
# New Code #
# Saves the whole/unpartitioned fp16 model when in ZeRO Stage-3 to the output directory if
# `stage3_gather_16bit_weights_on_model_save` is True in DeepSpeed Config file or
# `zero3_save_16bit_model` is True in DeepSpeed Plugin.
# For Zero Stages 1 and 2, models are saved as usual in the output directory.
# The model name saved is `pytorch_model.bin`
unwrapped_model.save_pretrained(
args.output_dir,
is_main_process=accelerator.is_main_process,
save_function=accelerator.save,
state_dict=accelerator.get_state_dict(model),
)
if accelerator.is_main_process:
tokenizer.save_pretrained(args.output_dir)
if args.push_to_hub:
repo.push_to_hub(commit_message="End of training", auto_lfs_prune=True)
with open(os.path.join(args.output_dir, "all_results.json"), "w") as f:
json.dump({"perplexity": perplexity, "eval_loss": eval_loss.item()}, f)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/local_sgd.py
|
# coding=utf-8
# Copyright 2023 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
from accelerate.local_sgd import LocalSGD
########################################################################
# This is a fully working simple example to use Accelerate
# with LocalSGD, which is a method to synchronize model
# parameters every K batches. It is different, but complementary
# to gradient accumulation.
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# New Code #
gradient_accumulation_steps = int(args.gradient_accumulation_steps)
local_sgd_steps = int(args.local_sgd_steps)
# Initialize accelerator
accelerator = Accelerator(
cpu=args.cpu, mixed_precision=args.mixed_precision, gradient_accumulation_steps=gradient_accumulation_steps
)
if accelerator.distributed_type not in [DistributedType.NO, DistributedType.MULTI_CPU, DistributedType.MULTI_GPU]:
raise NotImplementedError("LocalSGD is supported only for CPUs and GPUs (no DeepSpeed or MegatronLM)")
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
metric = evaluate.load("glue", "mrpc")
set_seed(seed)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs),
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
with LocalSGD(
accelerator=accelerator, model=model, local_sgd_steps=local_sgd_steps, enabled=local_sgd_steps is not None
) as local_sgd:
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
# New code #
# We use the new `accumulate` context manager to perform gradient accumulation
# We also currently do not support TPUs nor advise it as bugs were found on the XLA side when running our tests.
with accelerator.accumulate(model):
output = model(**batch)
loss = output.loss
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
# LocalSGD-specific line
local_sgd.step()
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
# New Code #
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="The number of minibatches to be ran before gradients are accumulated.",
)
parser.add_argument(
"--local_sgd_steps", type=int, default=8, help="Number of local SGD steps or None to disable local SGD"
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/tracking.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
########################################################################
# This is a fully working simple example to use Accelerate,
# specifically showcasing the experiment tracking capability,
# and builds off the `nlp_example.py` script.
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To help focus on the differences in the code, building `DataLoaders`
# was refactored into its own function.
# New additions from the base script can be found quickly by
# looking for the # New Code # tags
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# Initialize Accelerator
# New Code #
# We pass in "all" to `log_with` to grab all available trackers in the environment
# Note: If using a custom `Tracker` class, should be passed in here such as:
# >>> log_with = ["all", MyCustomTrackerClassInstance()]
if args.with_tracking:
accelerator = Accelerator(
cpu=args.cpu, mixed_precision=args.mixed_precision, log_with="all", project_dir=args.project_dir
)
else:
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
set_seed(seed)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
metric = evaluate.load("glue", "mrpc")
# If the batch size is too big we use gradient accumulation
gradient_accumulation_steps = 1
if batch_size > MAX_GPU_BATCH_SIZE and accelerator.distributed_type != DistributedType.TPU:
gradient_accumulation_steps = batch_size // MAX_GPU_BATCH_SIZE
batch_size = MAX_GPU_BATCH_SIZE
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs) // gradient_accumulation_steps,
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# New Code #
# We need to initialize the trackers we use. Overall configurations can also be stored
if args.with_tracking:
run = os.path.split(__file__)[-1].split(".")[0]
accelerator.init_trackers(run, config)
# Now we train the model
for epoch in range(num_epochs):
model.train()
# New Code #
# For our tracking example, we will log the total loss of each epoch
if args.with_tracking:
total_loss = 0
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
# New Code #
if args.with_tracking:
total_loss += loss.detach().float()
loss = loss / gradient_accumulation_steps
accelerator.backward(loss)
if step % gradient_accumulation_steps == 0:
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True` (the default).
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
# New Code #
# To actually log, we call `Accelerator.log`
# The values passed can be of `str`, `int`, `float` or `dict` of `str` to `float`/`int`
if args.with_tracking:
accelerator.log(
{
"accuracy": eval_metric["accuracy"],
"f1": eval_metric["f1"],
"train_loss": total_loss.item() / len(train_dataloader),
"epoch": epoch,
},
step=epoch,
)
# New Code #
# When a run is finished, you should call `accelerator.end_training()`
# to close all of the open trackers
if args.with_tracking:
accelerator.end_training()
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
parser.add_argument(
"--with_tracking",
action="store_true",
help="Whether to load in all available experiment trackers from the environment and use them for logging.",
)
parser.add_argument(
"--project_dir",
type=str,
default="logs",
help="Location on where to store experiment tracking logs` and relevent project information",
)
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/fsdp_with_peak_mem_tracking.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import gc
import os
import threading
import evaluate
import psutil
import torch
from datasets import load_dataset
from torch.distributed.fsdp.fully_sharded_data_parallel import FullOptimStateDictConfig, FullStateDictConfig
from torch.utils.data import DataLoader
from transformers import (
AutoModelForSequenceClassification,
AutoTokenizer,
get_linear_schedule_with_warmup,
set_seed,
)
from accelerate import Accelerator, DistributedType, FullyShardedDataParallelPlugin
########################################################################
# This is a fully working simple example to use Accelerate
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
# - FSDP
#
# This example also demonstrates the checkpointing and sharding capabilities
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
# New Code #
# Converting Bytes to Megabytes
def b2mb(x):
return int(x / 2**20)
# New Code #
# This context manager is used to track the peak memory usage of the process
class TorchTracemalloc:
def __enter__(self):
gc.collect()
torch.cuda.empty_cache()
torch.cuda.reset_max_memory_allocated() # reset the peak gauge to zero
self.begin = torch.cuda.memory_allocated()
self.process = psutil.Process()
self.cpu_begin = self.cpu_mem_used()
self.peak_monitoring = True
peak_monitor_thread = threading.Thread(target=self.peak_monitor_func)
peak_monitor_thread.daemon = True
peak_monitor_thread.start()
return self
def cpu_mem_used(self):
"""get resident set size memory for the current process"""
return self.process.memory_info().rss
def peak_monitor_func(self):
self.cpu_peak = -1
while True:
self.cpu_peak = max(self.cpu_mem_used(), self.cpu_peak)
# can't sleep or will not catch the peak right (this comment is here on purpose)
# time.sleep(0.001) # 1msec
if not self.peak_monitoring:
break
def __exit__(self, *exc):
self.peak_monitoring = False
gc.collect()
torch.cuda.empty_cache()
self.end = torch.cuda.memory_allocated()
self.peak = torch.cuda.max_memory_allocated()
self.used = b2mb(self.end - self.begin)
self.peaked = b2mb(self.peak - self.begin)
self.cpu_end = self.cpu_mem_used()
self.cpu_used = b2mb(self.cpu_end - self.cpu_begin)
self.cpu_peaked = b2mb(self.cpu_peak - self.cpu_begin)
# print(f"delta used/peak {self.used:4d}/{self.peaked:4d}")
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# New Code #
# Pass the advanced FSDP settings not part of the accelerate config by creating fsdp_plugin
fsdp_plugin = FullyShardedDataParallelPlugin(
state_dict_config=FullStateDictConfig(offload_to_cpu=False, rank0_only=False),
optim_state_dict_config=FullOptimStateDictConfig(offload_to_cpu=False, rank0_only=False),
)
# Initialize accelerator
if args.with_tracking:
accelerator = Accelerator(
cpu=args.cpu,
mixed_precision=args.mixed_precision,
log_with="wandb",
project_dir=args.logging_dir,
fsdp_plugin=fsdp_plugin,
)
else:
accelerator = Accelerator(fsdp_plugin=fsdp_plugin)
accelerator.print(accelerator.distributed_type)
if hasattr(args.checkpointing_steps, "isdigit"):
if args.checkpointing_steps == "epoch":
checkpointing_steps = args.checkpointing_steps
elif args.checkpointing_steps.isdigit():
checkpointing_steps = int(args.checkpointing_steps)
else:
raise ValueError(
f"Argument `checkpointing_steps` must be either a number or `epoch`. `{args.checkpointing_steps}` passed."
)
else:
checkpointing_steps = None
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
# We need to initialize the trackers we use, and also store our configuration
if args.with_tracking:
experiment_config = vars(args)
accelerator.init_trackers("fsdp_glue_no_trainer", experiment_config)
tokenizer = AutoTokenizer.from_pretrained(args.model_name_or_path)
datasets = load_dataset("glue", "mrpc")
metric = evaluate.load("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
# If the batch size is too big we use gradient accumulation
gradient_accumulation_steps = 1
if batch_size > MAX_GPU_BATCH_SIZE and accelerator.distributed_type != DistributedType.TPU:
gradient_accumulation_steps = batch_size // MAX_GPU_BATCH_SIZE
batch_size = MAX_GPU_BATCH_SIZE
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
set_seed(seed)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained(
args.model_name_or_path, return_dict=True, low_cpu_mem_usage=True
)
# New Code #
# For FSDP feature, it is highly recommended and efficient to prepare the model before creating optimizer
model = accelerator.prepare(model)
accelerator.print(model)
# Instantiate optimizer
# New Code #
# For FSDP feature, at present it doesn't support multiple parameter groups,
# so we need to create a single parameter group for the whole model
optimizer = torch.optim.AdamW(params=model.parameters(), lr=lr, weight_decay=2e-4)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=10,
num_training_steps=(len(train_dataloader) * num_epochs) // gradient_accumulation_steps,
)
# New Code #
# For FSDP feature, prepare everything except the model as we have already prepared the model
# before creating the optimizer
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
overall_step = 0
# Potentially load in the weights and states from a previous save
if args.resume_from_checkpoint:
if args.resume_from_checkpoint is not None or args.resume_from_checkpoint != "":
accelerator.print(f"Resumed from checkpoint: {args.resume_from_checkpoint}")
accelerator.load_state(args.resume_from_checkpoint)
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = [f.name for f in os.scandir(os.getcwd()) if f.is_dir()]
dirs.sort(key=os.path.getctime)
path = dirs[-1] # Sorts folders by date modified, most recent checkpoint is the last
# Extract `epoch_{i}` or `step_{i}`
training_difference = os.path.splitext(path)[0]
if "epoch" in training_difference:
num_epochs -= int(training_difference.replace("epoch_", ""))
resume_step = None
else:
resume_step = int(training_difference.replace("step_", ""))
num_epochs -= resume_step // len(train_dataloader)
# If resuming by step, we also need to know exactly how far into the DataLoader we went
resume_step = (num_epochs * len(train_dataloader)) - resume_step
# Now we train the model
for epoch in range(num_epochs):
# New Code #
# context manager to track the peak memory usage during the training epoch
with TorchTracemalloc() as tracemalloc:
model.train()
if args.with_tracking:
total_loss = 0
for step, batch in enumerate(train_dataloader):
# We need to skip steps until we reach the resumed step
if args.resume_from_checkpoint and epoch == 0:
if resume_step is not None and step < resume_step:
pass
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
loss = loss / gradient_accumulation_steps
# We keep track of the loss at each epoch
if args.with_tracking:
total_loss += loss.detach().float()
accelerator.backward(loss)
if step % gradient_accumulation_steps == 0:
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
# accelerator.print(lr_scheduler.get_lr())
overall_step += 1
if isinstance(checkpointing_steps, int):
output_dir = f"step_{overall_step}"
if overall_step % checkpointing_steps == 0:
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
# New Code #
# Printing the GPU memory usage details such as allocated memory, peak memory, and total memory usage
accelerator.print("Memory before entering the train : {}".format(b2mb(tracemalloc.begin)))
accelerator.print("Memory consumed at the end of the train (end-begin): {}".format(tracemalloc.used))
accelerator.print("Peak Memory consumed during the train (max-begin): {}".format(tracemalloc.peaked))
accelerator.print(
"Total Peak Memory consumed during the train (max): {}".format(
tracemalloc.peaked + b2mb(tracemalloc.begin)
)
)
# Logging the peak memory usage of the GPU to the tracker
if args.with_tracking:
accelerator.log(
{
"train_total_peak_memory": tracemalloc.peaked + b2mb(tracemalloc.begin),
},
step=epoch,
)
# New Code #
# context manager to track the peak memory usage during the evaluation
with TorchTracemalloc() as tracemalloc:
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
if args.with_tracking:
accelerator.log(
{
"accuracy": eval_metric["accuracy"],
"f1": eval_metric["f1"],
"train_loss": total_loss.item() / len(train_dataloader),
},
step=epoch,
)
if checkpointing_steps == "epoch":
output_dir = f"epoch_{epoch}"
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
# New Code #
# Printing the GPU memory usage details such as allocated memory, peak memory, and total memory usage
accelerator.print("Memory before entering the eval : {}".format(b2mb(tracemalloc.begin)))
accelerator.print("Memory consumed at the end of the eval (end-begin): {}".format(tracemalloc.used))
accelerator.print("Peak Memory consumed during the eval (max-begin): {}".format(tracemalloc.peaked))
accelerator.print(
"Total Peak Memory consumed during the eval (max): {}".format(tracemalloc.peaked + b2mb(tracemalloc.begin))
)
# Logging the peak memory usage of the GPU to the tracker
if args.with_tracking:
accelerator.log(
{
"eval_total_peak_memory": tracemalloc.peaked + b2mb(tracemalloc.begin),
},
step=epoch,
)
if args.with_tracking:
accelerator.end_training()
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
parser.add_argument(
"--checkpointing_steps",
type=str,
default=None,
help="Whether the various states should be saved at the end of every n steps, or 'epoch' for each epoch.",
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help="If the training should continue from a checkpoint folder.",
)
parser.add_argument(
"--with_tracking",
action="store_true",
help="Whether to load in all available experiment trackers from the environment and use them for logging.",
)
parser.add_argument(
"--output_dir",
type=str,
default=".",
help="Optional save directory where all checkpoint folders will be stored. Default is the current working directory.",
)
parser.add_argument(
"--logging_dir",
type=str,
default="logs",
help="Location on where to store experiment tracking logs`",
)
parser.add_argument(
"--model_name_or_path",
type=str,
help="Path to pretrained model or model identifier from huggingface.co/models.",
required=True,
)
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/megatron_lm_gpt_pretraining.py
|
#!/usr/bin/env python
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
Fine-tuning the library models for causal language modeling (GPT, GPT-2, CTRL, ...)
on a text file or a dataset without using HuggingFace Trainer.
Here is the full list of checkpoints on the hub that can be fine-tuned by this script:
https://huggingface.co/models?filter=text-generation
"""
# You can also adapt this script on your own causal language modeling task. Pointers for this are left as comments.
import argparse
import json
import logging
import math
import os
import random
from itertools import chain
from pathlib import Path
import datasets
import torch
import transformers
from datasets import load_dataset
from huggingface_hub import Repository
from torch.utils.data import DataLoader
from tqdm.auto import tqdm
from transformers import (
CONFIG_MAPPING,
MODEL_MAPPING,
AutoConfig,
AutoModelForCausalLM,
AutoTokenizer,
SchedulerType,
default_data_collator,
get_scheduler,
)
from transformers.utils import check_min_version, get_full_repo_name, send_example_telemetry
from transformers.utils.versions import require_version
from accelerate import Accelerator, DistributedType
from accelerate.logging import get_logger
from accelerate.utils import MegatronLMDummyScheduler, set_seed
# Will error if the minimal version of Transformers is not installed. Remove at your own risks.
check_min_version("4.23.0.dev0")
logger = get_logger(__name__)
require_version("datasets>=1.8.0", "To fix: pip install -r examples/pytorch/language-modeling/requirements.txt")
MODEL_CONFIG_CLASSES = list(MODEL_MAPPING.keys())
MODEL_TYPES = tuple(conf.model_type for conf in MODEL_CONFIG_CLASSES)
def parse_args():
parser = argparse.ArgumentParser(description="Finetune a transformers model on a causal language modeling task")
parser.add_argument(
"--dataset_name",
type=str,
default=None,
help="The name of the dataset to use (via the datasets library).",
)
parser.add_argument(
"--dataset_config_name",
type=str,
default=None,
help="The configuration name of the dataset to use (via the datasets library).",
)
parser.add_argument(
"--train_file", type=str, default=None, help="A csv or a json file containing the training data."
)
parser.add_argument(
"--validation_file", type=str, default=None, help="A csv or a json file containing the validation data."
)
parser.add_argument(
"--validation_split_percentage",
default=5,
help="The percentage of the train set used as validation set in case there's no validation split",
)
parser.add_argument(
"--model_name_or_path",
type=str,
help="Path to pretrained model or model identifier from huggingface.co/models.",
required=False,
)
parser.add_argument(
"--config_name",
type=str,
default=None,
help="Pretrained config name or path if not the same as model_name",
)
parser.add_argument(
"--tokenizer_name",
type=str,
default=None,
help="Pretrained tokenizer name or path if not the same as model_name",
)
parser.add_argument(
"--use_slow_tokenizer",
action="store_true",
help="If passed, will use a slow tokenizer (not backed by the 🤗 Tokenizers library).",
)
parser.add_argument(
"--per_device_train_batch_size",
type=int,
default=8,
help="Batch size (per device) for the training dataloader.",
)
parser.add_argument(
"--per_device_eval_batch_size",
type=int,
default=8,
help="Batch size (per device) for the evaluation dataloader.",
)
parser.add_argument(
"--learning_rate",
type=float,
default=5e-5,
help="Initial learning rate (after the potential warmup period) to use.",
)
parser.add_argument("--weight_decay", type=float, default=0.0, help="Weight decay to use.")
parser.add_argument("--num_train_epochs", type=int, default=3, help="Total number of training epochs to perform.")
parser.add_argument(
"--max_train_steps",
type=int,
default=None,
help="Total number of training steps to perform. If provided, overrides num_train_epochs.",
)
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="Number of updates steps to accumulate before performing a backward/update pass.",
)
parser.add_argument(
"--lr_scheduler_type",
type=SchedulerType,
default="linear",
help="The scheduler type to use.",
choices=["linear", "cosine", "cosine_with_restarts", "polynomial", "constant", "constant_with_warmup"],
)
parser.add_argument(
"--num_warmup_steps", type=int, default=0, help="Number of steps for the warmup in the lr scheduler."
)
parser.add_argument("--output_dir", type=str, default=None, help="Where to store the final model.")
parser.add_argument("--seed", type=int, default=None, help="A seed for reproducible training.")
parser.add_argument(
"--model_type",
type=str,
default=None,
help="Model type to use if training from scratch.",
choices=MODEL_TYPES,
)
parser.add_argument(
"--block_size",
type=int,
default=None,
help=(
"Optional input sequence length after tokenization. The training dataset will be truncated in block of"
" this size for training. Default to the model max input length for single sentence inputs (take into"
" account special tokens)."
),
)
parser.add_argument(
"--preprocessing_num_workers",
type=int,
default=None,
help="The number of processes to use for the preprocessing.",
)
parser.add_argument(
"--overwrite_cache", action="store_true", help="Overwrite the cached training and evaluation sets"
)
parser.add_argument(
"--no_keep_linebreaks", action="store_true", help="Do not keep line breaks when using TXT files."
)
parser.add_argument("--push_to_hub", action="store_true", help="Whether or not to push the model to the Hub.")
parser.add_argument(
"--hub_model_id", type=str, help="The name of the repository to keep in sync with the local `output_dir`."
)
parser.add_argument("--hub_token", type=str, help="The token to use to push to the Model Hub.")
parser.add_argument(
"--checkpointing_steps",
type=str,
default=None,
help="Whether the various states should be saved at the end of every n steps, or 'epoch' for each epoch.",
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help="If the training should continue from a checkpoint folder.",
)
parser.add_argument(
"--with_tracking",
action="store_true",
help="Whether to enable experiment trackers for logging.",
)
parser.add_argument(
"--report_to",
type=str,
default="all",
help=(
'The integration to report the results and logs to. Supported platforms are `"tensorboard"`,'
' `"wandb"` and `"comet_ml"`. Use `"all"` (default) to report to all integrations.'
"Only applicable when `--with_tracking` is passed."
),
)
args = parser.parse_args()
# Sanity checks
if args.dataset_name is None and args.train_file is None and args.validation_file is None:
raise ValueError("Need either a dataset name or a training/validation file.")
else:
if args.train_file is not None:
extension = args.train_file.split(".")[-1]
assert extension in ["csv", "json", "txt"], "`train_file` should be a csv, json or txt file."
if args.validation_file is not None:
extension = args.validation_file.split(".")[-1]
assert extension in ["csv", "json", "txt"], "`validation_file` should be a csv, json or txt file."
if args.push_to_hub:
assert args.output_dir is not None, "Need an `output_dir` to create a repo when `--push_to_hub` is passed."
return args
def main():
args = parse_args()
# Sending telemetry. Tracking the example usage helps us better allocate resources to maintain them. The
# information sent is the one passed as arguments along with your Python/PyTorch versions.
send_example_telemetry("run_clm_no_trainer", args)
# Initialize the accelerator. We will let the accelerator handle device placement for us in this example.
# If we're using tracking, we also need to initialize it here and it will by default pick up all supported trackers
# in the environment
accelerator_log_kwargs = {}
if args.with_tracking:
accelerator_log_kwargs["log_with"] = args.report_to
accelerator_log_kwargs["logging_dir"] = args.output_dir
accelerator = Accelerator(gradient_accumulation_steps=args.gradient_accumulation_steps, **accelerator_log_kwargs)
# Make one log on every process with the configuration for debugging.
logging.basicConfig(
format="%(asctime)s - %(levelname)s - %(name)s - %(message)s",
datefmt="%m/%d/%Y %H:%M:%S",
level=logging.INFO,
)
logger.info(accelerator.state, main_process_only=False)
if accelerator.is_local_main_process:
datasets.utils.logging.set_verbosity_warning()
transformers.utils.logging.set_verbosity_info()
else:
datasets.utils.logging.set_verbosity_error()
transformers.utils.logging.set_verbosity_error()
# If passed along, set the training seed now.
if args.seed is not None:
set_seed(args.seed)
# Handle the repository creation
if accelerator.is_main_process:
if args.push_to_hub:
if args.hub_model_id is None:
repo_name = get_full_repo_name(Path(args.output_dir).name, token=args.hub_token)
else:
repo_name = args.hub_model_id
repo = Repository(args.output_dir, clone_from=repo_name)
with open(os.path.join(args.output_dir, ".gitignore"), "w+") as gitignore:
if "step_*" not in gitignore:
gitignore.write("step_*\n")
if "epoch_*" not in gitignore:
gitignore.write("epoch_*\n")
elif args.output_dir is not None:
os.makedirs(args.output_dir, exist_ok=True)
accelerator.wait_for_everyone()
# Get the datasets: you can either provide your own CSV/JSON/TXT training and evaluation files (see below)
# or just provide the name of one of the public datasets available on the hub at https://huggingface.co/datasets/
# (the dataset will be downloaded automatically from the datasets Hub).
#
# For CSV/JSON files, this script will use the column called 'text' or the first column if no column called
# 'text' is found. You can easily tweak this behavior (see below).
#
# In distributed training, the load_dataset function guarantee that only one local process can concurrently
# download the dataset.
if args.dataset_name is not None:
# Downloading and loading a dataset from the hub.
raw_datasets = load_dataset(args.dataset_name, args.dataset_config_name)
if "validation" not in raw_datasets.keys():
raw_datasets["validation"] = load_dataset(
args.dataset_name,
args.dataset_config_name,
split=f"train[:{args.validation_split_percentage}%]",
)
raw_datasets["train"] = load_dataset(
args.dataset_name,
args.dataset_config_name,
split=f"train[{args.validation_split_percentage}%:]",
)
else:
data_files = {}
dataset_args = {}
if args.train_file is not None:
data_files["train"] = args.train_file
if args.validation_file is not None:
data_files["validation"] = args.validation_file
extension = args.train_file.split(".")[-1]
if extension == "txt":
extension = "text"
dataset_args["keep_linebreaks"] = not args.no_keep_linebreaks
raw_datasets = load_dataset(extension, data_files=data_files, **dataset_args)
# If no validation data is there, validation_split_percentage will be used to divide the dataset.
if "validation" not in raw_datasets.keys():
raw_datasets["validation"] = load_dataset(
extension,
data_files=data_files,
split=f"train[:{args.validation_split_percentage}%]",
**dataset_args,
)
raw_datasets["train"] = load_dataset(
extension,
data_files=data_files,
split=f"train[{args.validation_split_percentage}%:]",
**dataset_args,
)
# See more about loading any type of standard or custom dataset (from files, python dict, pandas DataFrame, etc) at
# https://huggingface.co/docs/datasets/loading_datasets.html.
# Load pretrained model and tokenizer
#
# In distributed training, the .from_pretrained methods guarantee that only one local process can concurrently
# download model & vocab.
if args.config_name:
config = AutoConfig.from_pretrained(args.config_name)
elif args.model_name_or_path:
config = AutoConfig.from_pretrained(args.model_name_or_path)
else:
config = CONFIG_MAPPING[args.model_type]()
logger.warning("You are instantiating a new config instance from scratch.")
if args.tokenizer_name:
tokenizer = AutoTokenizer.from_pretrained(args.tokenizer_name, use_fast=not args.use_slow_tokenizer)
elif args.model_name_or_path:
tokenizer = AutoTokenizer.from_pretrained(args.model_name_or_path, use_fast=not args.use_slow_tokenizer)
else:
raise ValueError(
"You are instantiating a new tokenizer from scratch. This is not supported by this script."
"You can do it from another script, save it, and load it from here, using --tokenizer_name."
)
if args.model_name_or_path:
model = AutoModelForCausalLM.from_pretrained(
args.model_name_or_path,
from_tf=bool(".ckpt" in args.model_name_or_path),
config=config,
)
else:
logger.info("Training new model from scratch")
model = AutoModelForCausalLM.from_config(config)
model.resize_token_embeddings(len(tokenizer))
# Preprocessing the datasets.
# First we tokenize all the texts.
column_names = raw_datasets["train"].column_names
text_column_name = "text" if "text" in column_names else column_names[0]
def tokenize_function(examples):
return tokenizer(examples[text_column_name])
with accelerator.main_process_first():
tokenized_datasets = raw_datasets.map(
tokenize_function,
batched=True,
num_proc=args.preprocessing_num_workers,
remove_columns=column_names,
load_from_cache_file=not args.overwrite_cache,
desc="Running tokenizer on dataset",
)
if args.block_size is None:
block_size = tokenizer.model_max_length
if block_size > 1024:
logger.warning(
f"The tokenizer picked seems to have a very large `model_max_length` ({tokenizer.model_max_length}). "
"Picking 1024 instead. You can change that default value by passing --block_size xxx."
)
block_size = 1024
else:
if args.block_size > tokenizer.model_max_length:
logger.warning(
f"The block_size passed ({args.block_size}) is larger than the maximum length for the model"
f"({tokenizer.model_max_length}). Using block_size={tokenizer.model_max_length}."
)
block_size = min(args.block_size, tokenizer.model_max_length)
# Main data processing function that will concatenate all texts from our dataset and generate chunks of block_size.
def group_texts(examples):
# Concatenate all texts.
concatenated_examples = {k: list(chain(*examples[k])) for k in examples.keys()}
total_length = len(concatenated_examples[list(examples.keys())[0]])
# We drop the small remainder, we could add padding if the model supported it instead of this drop, you can
# customize this part to your needs.
if total_length >= block_size:
total_length = (total_length // block_size) * block_size
# Split by chunks of max_len.
result = {
k: [t[i : i + block_size] for i in range(0, total_length, block_size)]
for k, t in concatenated_examples.items()
}
result["labels"] = result["input_ids"].copy()
return result
# Note that with `batched=True`, this map processes 1,000 texts together, so group_texts throws away a remainder
# for each of those groups of 1,000 texts. You can adjust that batch_size here but a higher value might be slower
# to preprocess.
#
# To speed up this part, we use multiprocessing. See the documentation of the map method for more information:
# https://huggingface.co/docs/datasets/package_reference/main_classes.html#datasets.Dataset.map
with accelerator.main_process_first():
lm_datasets = tokenized_datasets.map(
group_texts,
batched=True,
num_proc=args.preprocessing_num_workers,
load_from_cache_file=not args.overwrite_cache,
desc=f"Grouping texts in chunks of {block_size}",
)
train_dataset = lm_datasets["train"]
eval_dataset = lm_datasets["validation"]
# Log a few random samples from the training set:
for index in random.sample(range(len(train_dataset)), 3):
logger.info(f"Sample {index} of the training set: {train_dataset[index]}.")
# DataLoaders creation:
train_dataloader = DataLoader(
train_dataset, shuffle=True, collate_fn=default_data_collator, batch_size=args.per_device_train_batch_size
)
eval_dataloader = DataLoader(
eval_dataset, collate_fn=default_data_collator, batch_size=args.per_device_eval_batch_size
)
# Optimizer
# Split weights in two groups, one with weight decay and the other not.
no_decay = ["bias", "layer_norm.weight"]
optimizer_grouped_parameters = [
{
"params": [p for n, p in model.named_parameters() if not any(nd in n for nd in no_decay)],
"weight_decay": args.weight_decay,
},
{
"params": [p for n, p in model.named_parameters() if any(nd in n for nd in no_decay)],
"weight_decay": 0.0,
},
]
optimizer = torch.optim.AdamW(optimizer_grouped_parameters, lr=args.learning_rate)
# Scheduler and math around the number of training steps.
overrode_max_train_steps = False
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if args.max_train_steps is None:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
overrode_max_train_steps = True
# New Code
# For Megatron-LM, we need to use `MegatronLMDummyScheduler` instead of regular schedulers
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
lr_scheduler = MegatronLMDummyScheduler(
optimizer=optimizer,
total_num_steps=args.max_train_steps,
warmup_num_steps=args.num_warmup_steps,
)
else:
lr_scheduler = get_scheduler(
name=args.lr_scheduler_type,
optimizer=optimizer,
num_warmup_steps=args.num_warmup_steps * args.gradient_accumulation_steps,
num_training_steps=args.max_train_steps * args.gradient_accumulation_steps,
)
# Prepare everything with our `accelerator`.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# On TPU, the tie weights in our model have been disconnected, so we need to restore the ties.
if accelerator.distributed_type == DistributedType.TPU:
model.tie_weights()
# We need to recalculate our total training steps as the size of the training dataloader may have changed.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if overrode_max_train_steps:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
# Afterwards we recalculate our number of training epochs
args.num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# Figure out how many steps we should save the Accelerator states
checkpointing_steps = args.checkpointing_steps
if checkpointing_steps is not None and checkpointing_steps.isdigit():
checkpointing_steps = int(checkpointing_steps)
# We need to initialize the trackers we use, and also store our configuration.
# The trackers initializes automatically on the main process.
if args.with_tracking:
experiment_config = vars(args)
# TensorBoard cannot log Enums, need the raw value
experiment_config["lr_scheduler_type"] = experiment_config["lr_scheduler_type"].value
accelerator.init_trackers("clm_no_trainer", experiment_config)
# Train!
# New Code
# For Megatron-LM, we need to get `global_batch_size` from megatron_lm_plugin
# as it handles the specifics related to data parallelism, tensor model parallelism and pipeline parallelism
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
total_batch_size = accelerator.state.megatron_lm_plugin.global_batch_size
else:
total_batch_size = (
args.per_device_train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps
)
logger.info("***** Running training *****")
logger.info(f" Num examples = {len(train_dataset)}")
logger.info(f" Num Epochs = {args.num_train_epochs}")
logger.info(f" Instantaneous batch size per device = {args.per_device_train_batch_size}")
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_batch_size}")
logger.info(f" Gradient Accumulation steps = {args.gradient_accumulation_steps}")
logger.info(f" Total optimization steps = {args.max_train_steps}")
# Only show the progress bar once on each machine.
progress_bar = tqdm(range(args.max_train_steps), disable=not accelerator.is_local_main_process)
completed_steps = 0
starting_epoch = 0
# Potentially load in the weights and states from a previous save
if args.resume_from_checkpoint:
if args.resume_from_checkpoint is not None or args.resume_from_checkpoint != "":
accelerator.print(f"Resumed from checkpoint: {args.resume_from_checkpoint}")
accelerator.load_state(args.resume_from_checkpoint)
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = [f.name for f in os.scandir(os.getcwd()) if f.is_dir()]
dirs.sort(key=os.path.getctime)
path = dirs[-1] # Sorts folders by date modified, most recent checkpoint is the last
# Extract `epoch_{i}` or `step_{i}`
training_difference = os.path.splitext(path)[0]
if "epoch" in training_difference:
starting_epoch = int(training_difference.replace("epoch_", "")) + 1
resume_step = None
else:
# need to multiply `gradient_accumulation_steps` to reflect real steps
resume_step = int(training_difference.replace("step_", "")) * args.gradient_accumulation_steps
starting_epoch = resume_step // len(train_dataloader)
resume_step -= starting_epoch * len(train_dataloader)
# update the progress_bar if load from checkpoint
progress_bar.update(starting_epoch * num_update_steps_per_epoch)
completed_steps = starting_epoch * num_update_steps_per_epoch
for epoch in range(starting_epoch, args.num_train_epochs):
model.train()
if args.with_tracking:
total_loss = 0
for step, batch in enumerate(train_dataloader):
# We need to skip steps until we reach the resumed step
if args.resume_from_checkpoint and epoch == starting_epoch:
if resume_step is not None and step < resume_step:
if step % args.gradient_accumulation_steps == 0:
progress_bar.update(1)
completed_steps += 1
continue
with accelerator.accumulate(model):
outputs = model(**batch)
loss = outputs.loss
# We keep track of the loss at each epoch
if args.with_tracking:
total_loss += loss.detach().float()
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
# Checks if the accelerator has performed an optimization step behind the scenes
if accelerator.sync_gradients:
progress_bar.update(1)
completed_steps += 1
if isinstance(checkpointing_steps, int):
if completed_steps % checkpointing_steps == 0:
output_dir = f"step_{completed_steps }"
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
if completed_steps >= args.max_train_steps:
break
model.eval()
losses = []
for step, batch in enumerate(eval_dataloader):
with torch.no_grad():
outputs = model(**batch)
loss = outputs.loss
# New Code
# For Megatron-LM, the losses are already averaged across the data parallel group
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
losses.append(loss)
else:
losses.append(accelerator.gather_for_metrics(loss.repeat(args.per_device_eval_batch_size)))
try:
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
losses = torch.tensor(losses)
else:
losses = torch.cat(losses)
eval_loss = torch.mean(losses)
perplexity = math.exp(eval_loss)
except OverflowError:
perplexity = float("inf")
logger.info(f"epoch {epoch}: perplexity: {perplexity} eval_loss: {eval_loss}")
if args.with_tracking:
accelerator.log(
{
"perplexity": perplexity,
"eval_loss": eval_loss,
"train_loss": total_loss.item() / len(train_dataloader),
"epoch": epoch,
"step": completed_steps,
},
step=completed_steps,
)
if args.push_to_hub and epoch < args.num_train_epochs - 1:
accelerator.wait_for_everyone()
unwrapped_model = accelerator.unwrap_model(model)
unwrapped_model.save_pretrained(
args.output_dir, is_main_process=accelerator.is_main_process, save_function=accelerator.save
)
if accelerator.is_main_process:
tokenizer.save_pretrained(args.output_dir)
repo.push_to_hub(
commit_message=f"Training in progress epoch {epoch}", blocking=False, auto_lfs_prune=True
)
if args.checkpointing_steps == "epoch":
output_dir = f"epoch_{epoch}"
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
# this is causing some issue with Megatron-LM when using `wandb` at the end of the main function.
# Everything works fine inspite of commenting this out. (wandb finishes/closes the run without error)
# if args.with_tracking:
# accelerator.end_training()
if args.output_dir is not None:
accelerator.wait_for_everyone()
# New Code
# For Megatron-LM, we need to save the model using `accelerator.save_state`
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
accelerator.save_state(args.output_dir)
else:
unwrapped_model = accelerator.unwrap_model(model)
unwrapped_model.save_pretrained(
args.output_dir, is_main_process=accelerator.is_main_process, save_function=accelerator.save
)
if accelerator.is_main_process:
tokenizer.save_pretrained(args.output_dir)
if args.push_to_hub:
repo.push_to_hub(commit_message="End of training", auto_lfs_prune=True)
with open(os.path.join(args.output_dir, "all_results.json"), "w") as f:
json.dump({"perplexity": perplexity}, f)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/multi_process_metrics.py
|
# coding=utf-8
# Copyright 2022 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
########################################################################
# This is a fully working simple example to use Accelerate,
# specifically showcasing how to properly calculate the metrics on the
# validation dataset when in a distributed system, and builds off the
# `nlp_example.py` script.
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To help focus on the differences in the code, building `DataLoaders`
# was refactored into its own function.
# New additions from the base script can be found quickly by
# looking for the # New Code # tags
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# Initialize accelerator
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
metric = evaluate.load("glue", "mrpc")
# If the batch size is too big we use gradient accumulation
gradient_accumulation_steps = 1
if batch_size > MAX_GPU_BATCH_SIZE and accelerator.distributed_type != DistributedType.TPU:
gradient_accumulation_steps = batch_size // MAX_GPU_BATCH_SIZE
batch_size = MAX_GPU_BATCH_SIZE
set_seed(seed)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs) // gradient_accumulation_steps,
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
loss = loss / gradient_accumulation_steps
accelerator.backward(loss)
if step % gradient_accumulation_steps == 0:
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
samples_seen = 0
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather((predictions, batch["labels"]))
# New Code #
# First we check if it's a distributed system
if accelerator.use_distributed:
# Then see if we're on the last batch of our eval dataloader
if step == len(eval_dataloader) - 1:
# Last batch needs to be truncated on distributed systems as it contains additional samples
predictions = predictions[: len(eval_dataloader.dataset) - samples_seen]
references = references[: len(eval_dataloader.dataset) - samples_seen]
else:
# Otherwise we add the number of samples seen
samples_seen += references.shape[0]
# All of this can be avoided if you use `Accelerator.gather_for_metrics` instead of `Accelerator.gather`:
# accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/by_feature/checkpointing.py
|
# coding=utf-8
# Copyright 2021 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import evaluate
import torch
from datasets import load_dataset
from torch.optim import AdamW
from torch.utils.data import DataLoader
from transformers import AutoModelForSequenceClassification, AutoTokenizer, get_linear_schedule_with_warmup, set_seed
from accelerate import Accelerator, DistributedType
########################################################################
# This is a fully working simple example to use Accelerate,
# specifically showcasing the checkpointing capability,
# and builds off the `nlp_example.py` script.
#
# This example trains a Bert base model on GLUE MRPC
# in any of the following settings (with the same script):
# - single CPU or single GPU
# - multi GPUS (using PyTorch distributed mode)
# - (multi) TPUs
# - fp16 (mixed-precision) or fp32 (normal precision)
#
# To help focus on the differences in the code, building `DataLoaders`
# was refactored into its own function.
# New additions from the base script can be found quickly by
# looking for the # New Code # tags
#
# To run it in each of these various modes, follow the instructions
# in the readme for examples:
# https://github.com/huggingface/accelerate/tree/main/examples
#
########################################################################
MAX_GPU_BATCH_SIZE = 16
EVAL_BATCH_SIZE = 32
def get_dataloaders(accelerator: Accelerator, batch_size: int = 16):
"""
Creates a set of `DataLoader`s for the `glue` dataset,
using "bert-base-cased" as the tokenizer.
Args:
accelerator (`Accelerator`):
An `Accelerator` object
batch_size (`int`, *optional*):
The batch size for the train and validation DataLoaders.
"""
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
datasets = load_dataset("glue", "mrpc")
def tokenize_function(examples):
# max_length=None => use the model max length (it's actually the default)
outputs = tokenizer(examples["sentence1"], examples["sentence2"], truncation=True, max_length=None)
return outputs
# Apply the method we just defined to all the examples in all the splits of the dataset
# starting with the main process first:
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
# We also rename the 'label' column to 'labels' which is the expected name for labels by the models of the
# transformers library
tokenized_datasets = tokenized_datasets.rename_column("label", "labels")
def collate_fn(examples):
# On TPU it's best to pad everything to the same length or training will be very slow.
max_length = 128 if accelerator.distributed_type == DistributedType.TPU else None
# When using mixed precision we want round multiples of 8/16
if accelerator.mixed_precision == "fp8":
pad_to_multiple_of = 16
elif accelerator.mixed_precision != "no":
pad_to_multiple_of = 8
else:
pad_to_multiple_of = None
return tokenizer.pad(
examples,
padding="longest",
max_length=max_length,
pad_to_multiple_of=pad_to_multiple_of,
return_tensors="pt",
)
# Instantiate dataloaders.
train_dataloader = DataLoader(
tokenized_datasets["train"], shuffle=True, collate_fn=collate_fn, batch_size=batch_size
)
eval_dataloader = DataLoader(
tokenized_datasets["validation"], shuffle=False, collate_fn=collate_fn, batch_size=EVAL_BATCH_SIZE
)
return train_dataloader, eval_dataloader
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
from accelerate.test_utils.training import mocked_dataloaders
get_dataloaders = mocked_dataloaders # noqa: F811
def training_function(config, args):
# For testing only
if os.environ.get("TESTING_MOCKED_DATALOADERS", None) == "1":
config["num_epochs"] = 2
# Initialize accelerator
accelerator = Accelerator(cpu=args.cpu, mixed_precision=args.mixed_precision)
# Sample hyper-parameters for learning rate, batch size, seed and a few other HPs
lr = config["lr"]
num_epochs = int(config["num_epochs"])
seed = int(config["seed"])
batch_size = int(config["batch_size"])
# New Code #
# Parse out whether we are saving every epoch or after a certain number of batches
if hasattr(args.checkpointing_steps, "isdigit"):
if args.checkpointing_steps == "epoch":
checkpointing_steps = args.checkpointing_steps
elif args.checkpointing_steps.isdigit():
checkpointing_steps = int(args.checkpointing_steps)
else:
raise ValueError(
f"Argument `checkpointing_steps` must be either a number or `epoch`. `{args.checkpointing_steps}` passed."
)
else:
checkpointing_steps = None
set_seed(seed)
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
metric = evaluate.load("glue", "mrpc")
# If the batch size is too big we use gradient accumulation
gradient_accumulation_steps = 1
if batch_size > MAX_GPU_BATCH_SIZE and accelerator.distributed_type != DistributedType.TPU:
gradient_accumulation_steps = batch_size // MAX_GPU_BATCH_SIZE
batch_size = MAX_GPU_BATCH_SIZE
# Instantiate the model (we build the model here so that the seed also control new weights initialization)
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
# We could avoid this line since the accelerator is set with `device_placement=True` (default value).
# Note that if you are placing tensors on devices manually, this line absolutely needs to be before the optimizer
# creation otherwise training will not work on TPU (`accelerate` will kindly throw an error to make us aware of that).
model = model.to(accelerator.device)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=lr)
# Instantiate scheduler
lr_scheduler = get_linear_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=100,
num_training_steps=(len(train_dataloader) * num_epochs) // gradient_accumulation_steps,
)
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# New Code #
# We need to keep track of how many total steps we have iterated over
overall_step = 0
# We also need to keep track of the stating epoch so files are named properly
starting_epoch = 0
# We need to load the checkpoint back in before training here with `load_state`
# The total number of epochs is adjusted based on where the state is being loaded from,
# as we assume continuation of the same training script
if args.resume_from_checkpoint:
if args.resume_from_checkpoint is not None or args.resume_from_checkpoint != "":
accelerator.print(f"Resumed from checkpoint: {args.resume_from_checkpoint}")
accelerator.load_state(args.resume_from_checkpoint)
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = [f.name for f in os.scandir(os.getcwd()) if f.is_dir()]
dirs.sort(key=os.path.getctime)
path = dirs[-1] # Sorts folders by date modified, most recent checkpoint is the last
# Extract `epoch_{i}` or `step_{i}`
training_difference = os.path.splitext(path)[0]
if "epoch" in training_difference:
starting_epoch = int(training_difference.replace("epoch_", "")) + 1
resume_step = None
else:
resume_step = int(training_difference.replace("step_", ""))
starting_epoch = resume_step // len(train_dataloader)
resume_step -= starting_epoch * len(train_dataloader)
# Now we train the model
for epoch in range(starting_epoch, num_epochs):
model.train()
# New Code #
if args.resume_from_checkpoint and epoch == starting_epoch and resume_step is not None:
# We need to skip steps until we reach the resumed step
active_dataloader = accelerator.skip_first_batches(train_dataloader, resume_step)
overall_step += resume_step
else:
# After the first iteration though, we need to go back to the original dataloader
active_dataloader = train_dataloader
for step, batch in enumerate(active_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True`.
batch.to(accelerator.device)
outputs = model(**batch)
loss = outputs.loss
loss = loss / gradient_accumulation_steps
accelerator.backward(loss)
if step % gradient_accumulation_steps == 0:
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
# New Code #
overall_step += 1
# New Code #
# We save the model, optimizer, lr_scheduler, and seed states by calling `save_state`
# These are saved to folders named `step_{overall_step}`
# Will contain files: "pytorch_model.bin", "optimizer.bin", "scheduler.bin", and "random_states.pkl"
# If mixed precision was used, will also save a "scalar.bin" file
if isinstance(checkpointing_steps, int):
output_dir = f"step_{overall_step}"
if overall_step % checkpointing_steps == 0:
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
model.eval()
for step, batch in enumerate(eval_dataloader):
# We could avoid this line since we set the accelerator with `device_placement=True` (the default).
batch.to(accelerator.device)
with torch.no_grad():
outputs = model(**batch)
predictions = outputs.logits.argmax(dim=-1)
predictions, references = accelerator.gather_for_metrics((predictions, batch["labels"]))
metric.add_batch(
predictions=predictions,
references=references,
)
eval_metric = metric.compute()
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}:", eval_metric)
# New Code #
# We save the model, optimizer, lr_scheduler, and seed states by calling `save_state`
# These are saved to folders named `epoch_{epoch}`
# Will contain files: "pytorch_model.bin", "optimizer.bin", "scheduler.bin", and "random_states.pkl"
# If mixed precision was used, will also save a "scalar.bin" file
if checkpointing_steps == "epoch":
output_dir = f"epoch_{epoch}"
if args.output_dir is not None:
output_dir = os.path.join(args.output_dir, output_dir)
accelerator.save_state(output_dir)
def main():
parser = argparse.ArgumentParser(description="Simple example of training script.")
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16", "fp8"],
help="Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU.",
)
parser.add_argument("--cpu", action="store_true", help="If passed, will train on the CPU.")
parser.add_argument(
"--checkpointing_steps",
type=str,
default=None,
help="Whether the various states should be saved at the end of every n steps, or 'epoch' for each epoch.",
)
parser.add_argument(
"--output_dir",
type=str,
default=".",
help="Optional save directory where all checkpoint folders will be stored. Default is the current working directory.",
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help="If the training should continue from a checkpoint folder.",
)
args = parser.parse_args()
config = {"lr": 2e-5, "num_epochs": 3, "seed": 42, "batch_size": 16}
training_function(config, args)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/deepspeed_config_templates/zero_stage3_offload_config.json
|
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto"
}
},
"scheduler": {
"type": "WarmupDecayLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto",
"total_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 3,
"offload_optimizer": {
"device": "cpu",
"pin_memory": true
},
"offload_param": {
"device": "cpu",
"pin_memory": true
},
"overlap_comm": true,
"contiguous_gradients": true,
"reduce_bucket_size": "auto",
"stage3_prefetch_bucket_size": "auto",
"stage3_param_persistence_threshold": "auto",
"sub_group_size": 1e9,
"stage3_max_live_parameters": 1e9,
"stage3_max_reuse_distance": 1e9,
"stage3_gather_16bit_weights_on_model_save": "auto"
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/deepspeed_config_templates/zero_stage1_config.json
|
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto",
"torch_adam": true,
"adam_w_mode": true
}
},
"scheduler": {
"type": "WarmupDecayLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto",
"total_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 1,
"allgather_partitions": true,
"allgather_bucket_size": 2e8,
"overlap_comm": true,
"reduce_scatter": true,
"reduce_bucket_size": "auto",
"contiguous_gradients": true
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/deepspeed_config_templates/zero_stage3_config.json
|
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto"
}
},
"scheduler": {
"type": "WarmupDecayLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto",
"total_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 3,
"overlap_comm": true,
"contiguous_gradients": true,
"reduce_bucket_size": "auto",
"stage3_prefetch_bucket_size": "auto",
"stage3_param_persistence_threshold": "auto",
"sub_group_size": 1e9,
"stage3_max_live_parameters": 1e9,
"stage3_max_reuse_distance": 1e9,
"stage3_gather_16bit_weights_on_model_save": "auto"
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/deepspeed_config_templates/zero_stage2_offload_config.json
|
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto",
"torch_adam": true,
"adam_w_mode": true
}
},
"scheduler": {
"type": "WarmupDecayLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto",
"total_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 2,
"offload_optimizer": {
"device": "cpu",
"pin_memory": true
},
"allgather_partitions": true,
"allgather_bucket_size": 2e8,
"overlap_comm": true,
"reduce_scatter": true,
"reduce_bucket_size": "auto",
"contiguous_gradients": true
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
| 0 |
hf_public_repos/accelerate/examples
|
hf_public_repos/accelerate/examples/deepspeed_config_templates/zero_stage2_config.json
|
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto",
"torch_adam": true,
"adam_w_mode": true
}
},
"scheduler": {
"type": "WarmupDecayLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto",
"total_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 2,
"allgather_partitions": true,
"allgather_bucket_size": 2e8,
"overlap_comm": true,
"reduce_scatter": true,
"reduce_bucket_size": "auto",
"contiguous_gradients": true
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_examples.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import ast
import os
import re
import shutil
import tempfile
import unittest
from unittest import mock
import torch
from accelerate.test_utils.examples import compare_against_test
from accelerate.test_utils.testing import TempDirTestCase, require_trackers, run_command, slow
from accelerate.utils import write_basic_config
# DataLoaders built from `test_samples/MRPC` for quick testing
# Should mock `{script_name}.get_dataloaders` via:
# @mock.patch("{script_name}.get_dataloaders", mocked_dataloaders)
EXCLUDE_EXAMPLES = [
"cross_validation.py",
"gradient_accumulation.py",
"local_sgd.py",
"multi_process_metrics.py",
"memory.py",
"automatic_gradient_accumulation.py",
"fsdp_with_peak_mem_tracking.py",
"deepspeed_with_config_support.py",
"megatron_lm_gpt_pretraining.py",
]
class ExampleDifferenceTests(unittest.TestCase):
"""
This TestCase checks that all of the `complete_*` scripts contain all of the
information found in the `by_feature` scripts, line for line. If one fails,
then a complete example does not contain all of the features in the features
scripts, and should be updated.
Each example script should be a single test (such as `test_nlp_example`),
and should run `one_complete_example` twice: once with `parser_only=True`,
and the other with `parser_only=False`. This is so that when the test
failures are returned to the user, they understand if the discrepancy lies in
the `main` function, or the `training_loop` function. Otherwise it will be
unclear.
Also, if there are any expected differences between the base script used and
`complete_nlp_example.py` (the canonical base script), these should be included in
`special_strings`. These would be differences in how something is logged, print statements,
etc (such as calls to `Accelerate.log()`)
"""
def one_complete_example(
self, complete_file_name: str, parser_only: bool, secondary_filename: str = None, special_strings: list = None
):
"""
Tests a single `complete` example against all of the implemented `by_feature` scripts
Args:
complete_file_name (`str`):
The filename of a complete example
parser_only (`bool`):
Whether to look at the main training function, or the argument parser
secondary_filename (`str`, *optional*):
A potential secondary base file to strip all script information not relevant for checking,
such as "cv_example.py" when testing "complete_cv_example.py"
special_strings (`list`, *optional*):
A list of strings to potentially remove before checking no differences are left. These should be
diffs that are file specific, such as different logging variations between files.
"""
self.maxDiff = None
by_feature_path = os.path.abspath(os.path.join("examples", "by_feature"))
examples_path = os.path.abspath("examples")
for item in os.listdir(by_feature_path):
if item not in EXCLUDE_EXAMPLES:
item_path = os.path.join(by_feature_path, item)
if os.path.isfile(item_path) and ".py" in item_path:
with self.subTest(
tested_script=complete_file_name,
feature_script=item,
tested_section="main()" if parser_only else "training_function()",
):
diff = compare_against_test(
os.path.join(examples_path, complete_file_name), item_path, parser_only, secondary_filename
)
diff = "\n".join(diff)
if special_strings is not None:
for string in special_strings:
diff = diff.replace(string, "")
self.assertEqual(diff, "")
def test_nlp_examples(self):
self.one_complete_example("complete_nlp_example.py", True)
self.one_complete_example("complete_nlp_example.py", False)
def test_cv_examples(self):
cv_path = os.path.abspath(os.path.join("examples", "cv_example.py"))
special_strings = [
" " * 16 + "{\n\n",
" " * 20 + '"accuracy": eval_metric["accuracy"],\n\n',
" " * 20 + '"f1": eval_metric["f1"],\n\n',
" " * 20 + '"train_loss": total_loss.item() / len(train_dataloader),\n\n',
" " * 20 + '"epoch": epoch,\n\n',
" " * 16 + "},\n\n",
" " * 16 + "step=epoch,\n",
" " * 12,
" " * 8 + "for step, batch in enumerate(active_dataloader):\n",
]
self.one_complete_example("complete_cv_example.py", True, cv_path, special_strings)
self.one_complete_example("complete_cv_example.py", False, cv_path, special_strings)
@mock.patch.dict(os.environ, {"TESTING_MOCKED_DATALOADERS": "1"})
class FeatureExamplesTests(TempDirTestCase):
clear_on_setup = False
@classmethod
def setUpClass(cls):
super().setUpClass()
cls._tmpdir = tempfile.mkdtemp()
cls.configPath = os.path.join(cls._tmpdir, "default_config.yml")
write_basic_config(save_location=cls.configPath)
cls._launch_args = ["accelerate", "launch", "--config_file", cls.configPath]
@classmethod
def tearDownClass(cls):
super().tearDownClass()
shutil.rmtree(cls._tmpdir)
def test_checkpointing_by_epoch(self):
testargs = f"""
examples/by_feature/checkpointing.py
--checkpointing_steps epoch
--output_dir {self.tmpdir}
""".split()
run_command(self._launch_args + testargs)
self.assertTrue(os.path.exists(os.path.join(self.tmpdir, "epoch_0")))
def test_checkpointing_by_steps(self):
testargs = f"""
examples/by_feature/checkpointing.py
--checkpointing_steps 1
--output_dir {self.tmpdir}
""".split()
_ = run_command(self._launch_args + testargs)
self.assertTrue(os.path.exists(os.path.join(self.tmpdir, "step_2")))
def test_load_states_by_epoch(self):
testargs = f"""
examples/by_feature/checkpointing.py
--resume_from_checkpoint {os.path.join(self.tmpdir, "epoch_0")}
""".split()
output = run_command(self._launch_args + testargs, return_stdout=True)
self.assertNotIn("epoch 0:", output)
self.assertIn("epoch 1:", output)
def test_load_states_by_steps(self):
testargs = f"""
examples/by_feature/checkpointing.py
--resume_from_checkpoint {os.path.join(self.tmpdir, "step_2")}
""".split()
output = run_command(self._launch_args + testargs, return_stdout=True)
if torch.cuda.is_available():
num_processes = torch.cuda.device_count()
else:
num_processes = 1
if num_processes > 1:
self.assertNotIn("epoch 0:", output)
self.assertIn("epoch 1:", output)
else:
self.assertIn("epoch 0:", output)
self.assertIn("epoch 1:", output)
@slow
def test_cross_validation(self):
testargs = """
examples/by_feature/cross_validation.py
--num_folds 2
""".split()
with mock.patch.dict(os.environ, {"TESTING_MOCKED_DATALOADERS": "0"}):
output = run_command(self._launch_args + testargs, return_stdout=True)
results = re.findall("({.+})", output)
results = [r for r in results if "accuracy" in r][-1]
results = ast.literal_eval(results)
self.assertGreaterEqual(results["accuracy"], 0.75)
def test_multi_process_metrics(self):
testargs = ["examples/by_feature/multi_process_metrics.py"]
run_command(self._launch_args + testargs)
@require_trackers
@mock.patch.dict(os.environ, {"WANDB_MODE": "offline"})
def test_tracking(self):
with tempfile.TemporaryDirectory() as tmpdir:
testargs = f"""
examples/by_feature/tracking.py
--with_tracking
--project_dir {tmpdir}
""".split()
run_command(self._launch_args + testargs)
self.assertTrue(os.path.exists(os.path.join(tmpdir, "tracking")))
def test_gradient_accumulation(self):
testargs = ["examples/by_feature/gradient_accumulation.py"]
run_command(self._launch_args + testargs)
def test_local_sgd(self):
testargs = ["examples/by_feature/local_sgd.py"]
run_command(self._launch_args + testargs)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_sagemaker.py
|
import unittest
from dataclasses import dataclass
import pytest
from accelerate.commands.config.config_args import SageMakerConfig
from accelerate.utils import ComputeEnvironment
from accelerate.utils.launch import _convert_nargs_to_dict
@dataclass
class MockLaunchConfig(SageMakerConfig):
compute_environment = ComputeEnvironment.AMAZON_SAGEMAKER
fp16 = True
ec2_instance_type = "ml.p3.2xlarge"
iam_role_name = "accelerate_sagemaker_execution_role"
profile = "hf-sm"
region = "us-east-1"
num_machines = 1
base_job_name = "accelerate-sagemaker-1"
pytorch_version = "1.6"
transformers_version = "4.4"
training_script = "train.py"
success_training_script_args = [
"--model_name_or_path",
"bert",
"--do_train",
"False",
"--epochs",
"3",
"--learning_rate",
"5e-5",
"--max_steps",
"50.5",
]
fail_training_script_args = [
"--model_name_or_path",
"bert",
"--do_train",
"--do_test",
"False",
"--do_predict",
"--epochs",
"3",
"--learning_rate",
"5e-5",
"--max_steps",
"50.5",
]
class SageMakerLaunch(unittest.TestCase):
def test_args_convert(self):
# If no defaults are changed, `to_kwargs` returns an empty dict.
converted_args = _convert_nargs_to_dict(MockLaunchConfig.success_training_script_args)
assert isinstance(converted_args["model_name_or_path"], str)
assert isinstance(converted_args["do_train"], bool)
assert isinstance(converted_args["epochs"], int)
assert isinstance(converted_args["learning_rate"], float)
assert isinstance(converted_args["max_steps"], float)
with pytest.raises(ValueError):
_convert_nargs_to_dict(MockLaunchConfig.fail_training_script_args)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_modeling_utils.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import json
import os
import tempfile
import unittest
from collections import OrderedDict
import torch
import torch.nn as nn
from accelerate import init_empty_weights
from accelerate.test_utils import require_cuda, require_huggingface_suite, require_multi_gpu, require_safetensors
from accelerate.utils.modeling import (
check_device_map,
clean_device_map,
compute_module_sizes,
find_tied_parameters,
get_balanced_memory,
infer_auto_device_map,
load_checkpoint_in_model,
load_state_dict,
named_module_tensors,
retie_parameters,
set_module_tensor_to_device,
)
class ModelForTest(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(3, 4)
self.batchnorm = nn.BatchNorm1d(4)
self.linear2 = nn.Linear(4, 5)
def forward(self, x):
return self.linear2(self.batchnorm(self.linear1(x)))
def sequential_model(num_layers):
layers = OrderedDict([(f"linear{i}", nn.Linear(1000, 1000)) for i in range(1, num_layers + 1)])
return nn.Sequential(layers)
class ModelingUtilsTester(unittest.TestCase):
def check_set_module_tensor_for_device(self, model, device1, device2):
self.assertEqual(model.linear1.weight.device, torch.device(device1))
with self.subTest("Access by submodule and direct name for a parameter"):
set_module_tensor_to_device(model.linear1, "weight", device2)
self.assertEqual(model.linear1.weight.device, torch.device(device2))
if torch.device(device2) == torch.device("meta"):
with self.assertRaises(ValueError):
# We need a `value` to set the weight back on device1
set_module_tensor_to_device(model.linear1, "weight", device1)
set_module_tensor_to_device(model.linear1, "weight", device1, value=torch.randn(4, 3))
else:
set_module_tensor_to_device(model.linear1, "weight", device1)
self.assertEqual(model.linear1.weight.device, torch.device(device1))
with self.subTest("Access by module and full name for a parameter"):
set_module_tensor_to_device(model, "linear1.weight", device2)
self.assertEqual(model.linear1.weight.device, torch.device(device2))
if torch.device(device2) == torch.device("meta"):
with self.assertRaises(ValueError):
# We need a `value` to set the weight back on device1
set_module_tensor_to_device(model, "linear1.weight", device1)
set_module_tensor_to_device(model, "linear1.weight", device1, value=torch.randn(4, 3))
else:
set_module_tensor_to_device(model, "linear1.weight", device1)
self.assertEqual(model.linear1.weight.device, torch.device(device1))
self.assertEqual(model.batchnorm.running_mean.device, torch.device(device1))
with self.subTest("Access by submodule and direct name for a buffer"):
set_module_tensor_to_device(model.batchnorm, "running_mean", device2)
self.assertEqual(model.batchnorm.running_mean.device, torch.device(device2))
if torch.device(device2) == torch.device("meta"):
with self.assertRaises(ValueError):
# We need a `value` to set the weight back on device1
set_module_tensor_to_device(model.batchnorm, "running_mean", device1)
set_module_tensor_to_device(model.batchnorm, "running_mean", device1, value=torch.randn(4))
else:
set_module_tensor_to_device(model.batchnorm, "running_mean", device1)
self.assertEqual(model.batchnorm.running_mean.device, torch.device(device1))
with self.subTest("Access by module and full name for a parameter"):
set_module_tensor_to_device(model, "batchnorm.running_mean", device2)
self.assertEqual(model.batchnorm.running_mean.device, torch.device(device2))
if torch.device(device2) == torch.device("meta"):
with self.assertRaises(ValueError):
# We need a `value` to set the weight back on CPU
set_module_tensor_to_device(model, "batchnorm.running_mean", device1)
set_module_tensor_to_device(model, "batchnorm.running_mean", device1, value=torch.randn(4))
else:
set_module_tensor_to_device(model, "batchnorm.running_mean", device1)
self.assertEqual(model.batchnorm.running_mean.device, torch.device(device1))
def test_set_module_tensor_to_meta_and_cpu(self):
model = ModelForTest()
self.check_set_module_tensor_for_device(model, "cpu", "meta")
@require_cuda
def test_set_module_tensor_to_cpu_and_gpu(self):
model = ModelForTest()
self.check_set_module_tensor_for_device(model, "cpu", 0)
@require_cuda
def test_set_module_tensor_to_meta_and_gpu(self):
model = ModelForTest().to(0)
self.check_set_module_tensor_for_device(model, 0, "meta")
@require_multi_gpu
def test_set_module_tensor_between_gpus(self):
model = ModelForTest().to(0)
self.check_set_module_tensor_for_device(model, 0, 1)
def test_set_module_tensor_sets_dtype(self):
model = ModelForTest()
set_module_tensor_to_device(model, "linear1.weight", "cpu", value=model.linear1.weight, dtype=torch.float16)
self.assertEqual(model.linear1.weight.dtype, torch.float16)
def test_set_module_tensor_checks_shape(self):
model = ModelForTest()
tensor = torch.zeros((2, 2))
with self.assertRaises(ValueError) as cm:
set_module_tensor_to_device(model, "linear1.weight", "cpu", value=tensor)
self.assertEqual(
str(cm.exception),
'Trying to set a tensor of shape torch.Size([2, 2]) in "weight" (which has shape torch.Size([4, 3])), this look incorrect.',
)
def test_named_tensors(self):
model = nn.BatchNorm1d(4)
named_tensors = named_module_tensors(model)
self.assertListEqual(
[name for name, _ in named_tensors],
["weight", "bias", "running_mean", "running_var", "num_batches_tracked"],
)
named_tensors = named_module_tensors(model, include_buffers=False)
self.assertListEqual([name for name, _ in named_tensors], ["weight", "bias"])
model = ModelForTest()
named_tensors = named_module_tensors(model)
self.assertListEqual([name for name, _ in named_tensors], [])
named_tensors = named_module_tensors(model, recurse=True)
self.assertListEqual(
[name for name, _ in named_tensors],
[
"linear1.weight",
"linear1.bias",
"batchnorm.weight",
"batchnorm.bias",
"linear2.weight",
"linear2.bias",
"batchnorm.running_mean",
"batchnorm.running_var",
"batchnorm.num_batches_tracked",
],
)
named_tensors = named_module_tensors(model, include_buffers=False, recurse=True)
self.assertListEqual(
[name for name, _ in named_tensors],
["linear1.weight", "linear1.bias", "batchnorm.weight", "batchnorm.bias", "linear2.weight", "linear2.bias"],
)
def test_find_tied_parameters(self):
model = sequential_model(4)
self.assertListEqual(find_tied_parameters(model), [])
model.linear2.weight = model.linear1.weight
self.assertListEqual(find_tied_parameters(model), [["linear1.weight", "linear2.weight"]])
model.linear4.weight = model.linear1.weight
self.assertListEqual(find_tied_parameters(model), [["linear1.weight", "linear2.weight", "linear4.weight"]])
model = sequential_model(5)
model.linear1.weight = model.linear4.weight
model.linear2.weight = model.linear3.weight
model.linear5.weight = model.linear2.weight
tied_params = sorted(find_tied_parameters(model), key=lambda x: len(x))
self.assertListEqual(
tied_params, [["linear1.weight", "linear4.weight"], ["linear2.weight", "linear3.weight", "linear5.weight"]]
)
model = nn.Sequential(OrderedDict([("block1", sequential_model(4)), ("block2", sequential_model(4))]))
model.block1.linear1.weight = model.block2.linear1.weight
self.assertListEqual(find_tied_parameters(model), [["block1.linear1.weight", "block2.linear1.weight"]])
def test_retie_parameters(self):
model = sequential_model(2)
retie_parameters(model, [["linear1.weight", "linear2.weight"]])
self.assertIs(model.linear1.weight, model.linear2.weight)
model = sequential_model(3)
retie_parameters(model, [["linear1.weight", "linear2.weight", "linear3.weight"]])
self.assertIs(model.linear1.weight, model.linear2.weight)
self.assertIs(model.linear1.weight, model.linear3.weight)
model = sequential_model(5)
retie_parameters(
model, [["linear1.weight", "linear4.weight"], ["linear2.weight", "linear3.weight", "linear5.weight"]]
)
self.assertIs(model.linear1.weight, model.linear4.weight)
self.assertIs(model.linear2.weight, model.linear3.weight)
self.assertIs(model.linear2.weight, model.linear5.weight)
model = nn.Sequential(OrderedDict([("block1", sequential_model(4)), ("block2", sequential_model(4))]))
retie_parameters(model, [["block1.linear1.weight", "block2.linear1.weight"]])
self.assertIs(model.block1.linear1.weight, model.block2.linear1.weight)
def test_compute_module_sizes(self):
model = ModelForTest()
expected_sizes = {"": 236, "linear1": 64, "linear1.weight": 48, "linear1.bias": 16}
expected_sizes.update({"linear2": 100, "linear2.weight": 80, "linear2.bias": 20})
expected_sizes.update({"batchnorm": 72, "batchnorm.weight": 16, "batchnorm.bias": 16})
expected_sizes.update(
{"batchnorm.running_mean": 16, "batchnorm.running_var": 16, "batchnorm.num_batches_tracked": 8}
)
module_sizes = compute_module_sizes(model)
self.assertDictEqual(module_sizes, expected_sizes)
model.half()
expected_sizes = {k: s // 2 for k, s in expected_sizes.items()}
# This one is not converted to half.
expected_sizes["batchnorm.num_batches_tracked"] = 8
# This impacts batchnorm and total
expected_sizes["batchnorm"] += 4
expected_sizes[""] += 4
module_sizes = compute_module_sizes(model)
self.assertDictEqual(module_sizes, expected_sizes)
def test_check_device_map(self):
model = ModelForTest()
check_device_map(model, {"": 0})
with self.assertRaises(ValueError):
check_device_map(model, {"linear1": 0, "linear2": 1})
check_device_map(model, {"linear1": 0, "linear2": 1, "batchnorm": 1})
def shard_test_model(self, model, tmp_dir):
module_index = {
"linear1": "checkpoint_part1.bin",
"batchnorm": "checkpoint_part2.bin",
"linear2": "checkpoint_part3.bin",
}
index = {}
for name, _ in model.state_dict().items():
module = name.split(".")[0]
index[name] = module_index[module]
with open(os.path.join(tmp_dir, "weight_map.index.json"), "w") as f:
json.dump(index, f)
for module, fname in module_index.items():
state_dict = {k: v for k, v in model.state_dict().items() if k.startswith(module)}
full_fname = os.path.join(tmp_dir, fname)
torch.save(state_dict, full_fname)
def test_load_checkpoint_in_model(self):
# Check with whole checkpoint
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
fname = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), fname)
load_checkpoint_in_model(model, fname)
# Check with sharded index
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
self.shard_test_model(model, tmp_dir)
index_file = os.path.join(tmp_dir, "weight_map.index.json")
load_checkpoint_in_model(model, index_file)
# Check with sharded checkpoint
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
self.shard_test_model(model, tmp_dir)
load_checkpoint_in_model(model, tmp_dir)
@require_cuda
def test_load_checkpoint_in_model_one_gpu(self):
device_map = {"linear1": 0, "batchnorm": "cpu", "linear2": "cpu"}
# Check with whole checkpoint
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
fname = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), fname)
load_checkpoint_in_model(model, fname, device_map=device_map)
self.assertEqual(model.linear1.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# Check with sharded index
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
self.shard_test_model(model, tmp_dir)
index_file = os.path.join(tmp_dir, "weight_map.index.json")
load_checkpoint_in_model(model, index_file, device_map=device_map)
self.assertEqual(model.linear1.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# Check with sharded checkpoint folder
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
self.shard_test_model(model, tmp_dir)
load_checkpoint_in_model(model, tmp_dir, device_map=device_map)
self.assertEqual(model.linear1.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
@require_cuda
def test_load_checkpoint_in_model_disk_offload(self):
device_map = {"linear1": "cpu", "batchnorm": "disk", "linear2": "cpu"}
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
fname = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), fname)
load_checkpoint_in_model(model, fname, device_map=device_map, offload_folder=tmp_dir)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
# Buffers are not offloaded by default
self.assertEqual(model.batchnorm.running_mean.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
fname = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), fname)
load_checkpoint_in_model(model, fname, device_map=device_map, offload_folder=tmp_dir, offload_buffers=True)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.running_mean.device, torch.device("meta"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
@require_multi_gpu
def test_load_checkpoint_in_model_two_gpu(self):
device_map = {"linear1": 0, "batchnorm": "cpu", "linear2": 1}
# Check with whole checkpoint
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
fname = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), fname)
load_checkpoint_in_model(model, fname, device_map=device_map)
self.assertEqual(model.linear1.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device(1))
# Check with sharded index
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
self.shard_test_model(model, tmp_dir)
index_file = os.path.join(tmp_dir, "weight_map.index.json")
load_checkpoint_in_model(model, index_file, device_map=device_map)
self.assertEqual(model.linear1.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device(1))
# Check with sharded checkpoint
model = ModelForTest()
with tempfile.TemporaryDirectory() as tmp_dir:
self.shard_test_model(model, tmp_dir)
load_checkpoint_in_model(model, tmp_dir, device_map=device_map)
self.assertEqual(model.linear1.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device(1))
def test_clean_device_map(self):
# Regroup everything if all is on the same device
self.assertDictEqual(clean_device_map({"a": 0, "b": 0, "c": 0}), {"": 0})
# Regroups children of level 1 on the same device
self.assertDictEqual(
clean_device_map({"a.x": 0, "a.y": 0, "b.x": 1, "b.y": 1, "c": 1}), {"a": 0, "b": 1, "c": 1}
)
# Regroups children of level 2 on the same device
self.assertDictEqual(
clean_device_map({"a.x": 0, "a.y": 0, "b.x.0": 1, "b.x.1": 1, "b.y.0": 2, "b.y.1": 2, "c": 2}),
{"a": 0, "b.x": 1, "b.y": 2, "c": 2},
)
def test_infer_auto_device_map(self):
model = ModelForTest()
# model has size 236: linear1 64, batchnorm 72, linear2 100
device_map = infer_auto_device_map(model, max_memory={0: 200, 1: 200})
# only linear1 fits on device 0 as we keep memory available for the maximum layer in case of offload
self.assertDictEqual(device_map, {"linear1": 0, "batchnorm": 1, "linear2": 1})
device_map = infer_auto_device_map(model, max_memory={0: 200, 1: 172, 2: 200})
# On device 1, we don't care about keeping size available for the max layer, so even if there is just the
# size available for batchnorm + linear2, they fit here.
self.assertDictEqual(device_map, {"linear1": 0, "batchnorm": 1, "linear2": 1})
model.linear1.weight = model.linear2.weight
device_map = infer_auto_device_map(model, max_memory={0: 200, 1: 200})
# By tying weights, the whole model fits on device 0
self.assertDictEqual(device_map, {"": 0})
# When splitting a bigger model, the split is done at the layer level
model = nn.Sequential(ModelForTest(), ModelForTest(), ModelForTest())
device_map = infer_auto_device_map(model, max_memory={0: 500, 1: 500})
self.assertDictEqual(device_map, {"0": 0, "1.linear1": 0, "1.batchnorm": 0, "1.linear2": 1, "2": 1})
# With no_split_module_classes, it's done at that module level
model = nn.Sequential(ModelForTest(), ModelForTest(), ModelForTest())
device_map = infer_auto_device_map(
model, max_memory={0: 500, 1: 500}, no_split_module_classes=["ModelForTest"]
)
self.assertDictEqual(device_map, {"0": 0, "1": 1, "2": 1})
def test_infer_auto_device_map_with_tied_weights(self):
model = nn.Sequential(
OrderedDict([("layer1", ModelForTest()), ("layer2", ModelForTest()), ("layer3", ModelForTest())])
)
model.layer3.linear2.weight = model.layer1.linear2.weight
device_map = infer_auto_device_map(model, max_memory={0: 400, 1: 500})
expected = {"layer1": 0, "layer3.linear2": 0, "layer2": 1, "layer3.linear1": 1, "layer3.batchnorm": 1}
self.assertDictEqual(device_map, expected)
# With three weights tied together
model.layer2.linear2.weight = model.layer1.linear2.weight
device_map = infer_auto_device_map(model, max_memory={0: 400, 1: 500})
expected = {
"layer1": 0,
"layer2.linear2": 0,
"layer3.linear2": 0,
"layer2.linear1": 1,
"layer2.batchnorm": 1,
"layer3.linear1": 1,
"layer3.batchnorm": 1,
}
self.assertDictEqual(device_map, expected)
# With two groups of weights tied together
model.layer2.linear1.weight = model.layer1.linear1.weight
device_map = infer_auto_device_map(model, max_memory={0: 400, 1: 500})
expected = {
"layer1": 0,
"layer2.linear1": 0,
"layer2.linear2": 0,
"layer3.linear2": 0,
"layer2.batchnorm": 1,
"layer3.linear1": 1,
"layer3.batchnorm": 1,
}
self.assertDictEqual(device_map, expected)
# With weights ties in the same module
model = nn.Sequential(
OrderedDict(
[
("linear1", nn.Linear(4, 4)),
("linear2", nn.Linear(6, 6)),
("linear3", nn.Linear(4, 4)),
("linear4", nn.Linear(6, 6)),
]
)
)
model.linear3.weight = model.linear1.weight
model.linear3.bias = model.linear1.bias
device_map = infer_auto_device_map(model, max_memory={0: 250, 1: 400})
expected = {"linear1": 0, "linear2": 1, "linear3": 0, "linear4": 1}
self.assertDictEqual(device_map, expected)
@require_huggingface_suite
def test_infer_auto_device_map_on_t0pp(self):
from transformers import AutoConfig, AutoModelForSeq2SeqLM
config = AutoConfig.from_pretrained("bigscience/T0pp")
with init_empty_weights():
model = AutoModelForSeq2SeqLM.from_config(config)
model.tie_weights()
special_dtypes = {n: torch.float32 for n, _ in model.named_parameters() if "wo" in n}
max_memory = {0: 10**10, 1: 10**10, "cpu": 10**10}
device_map = infer_auto_device_map(
model,
no_split_module_classes=["T5Block"],
dtype=torch.float16,
max_memory=max_memory,
special_dtypes=special_dtypes,
)
# The 3 tied weights should all be on device 0
self.assertEqual(device_map["shared"], 0)
self.assertEqual(device_map["encoder.embed_tokens"], 0)
self.assertEqual(device_map["decoder.embed_tokens"], 0)
@require_cuda
def test_get_balanced_memory(self):
model = ModelForTest()
# model has size 236: linear1 64, batchnorm 72, linear2 100
max_memory = get_balanced_memory(model, max_memory={0: 200, 1: 200})
self.assertDictEqual({0: 200, 1: 200}, max_memory)
# We should be able to set models on a non-contiguous sub-set of
max_memory = get_balanced_memory(model, max_memory={0: 200, 2: 200})
self.assertDictEqual({0: 200, 2: 200}, max_memory)
max_memory = get_balanced_memory(model, max_memory={0: 300, 1: 300})
self.assertDictEqual({0: 215, 1: 300}, max_memory)
# Last device always get max memory to give more buffer and avoid accidental CPU offload
max_memory = get_balanced_memory(model, max_memory={0: 300, 1: 500})
self.assertDictEqual({0: 215, 1: 500}, max_memory)
# Last device always get max memory to give more buffer, even if CPU is provided
max_memory = get_balanced_memory(model, max_memory={0: 300, "cpu": 1000})
self.assertDictEqual({0: 300, "cpu": 1000}, max_memory)
# If we set a device to 0, it's not counted.
max_memory = get_balanced_memory(model, max_memory={0: 0, 1: 300, 2: 300})
self.assertDictEqual({0: 0, 1: 215, 2: 300}, max_memory)
@require_cuda
@require_safetensors
def test_load_state_dict(self):
from safetensors.torch import save_file
state_dict = {k: torch.randn(4, 5) for k in ["a", "b", "c"]}
device_maps = [{"a": "cpu", "b": 0, "c": "disk"}, {"a": 0, "b": 0, "c": "disk"}, {"a": 0, "b": 0, "c": 0}]
for device_map in device_maps:
with tempfile.TemporaryDirectory() as tmp_dir:
checkpoint_file = os.path.join(tmp_dir, "model.safetensors")
save_file(state_dict, checkpoint_file, metadata={"format": "pt"})
loaded_state_dict = load_state_dict(checkpoint_file, device_map=device_map)
for param, device in device_map.items():
device = device if device != "disk" else "cpu"
self.assertEqual(loaded_state_dict[param].device, torch.device(device))
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_accelerator.py
|
import json
import os
import tempfile
from unittest.mock import patch
import torch
from torch.utils.data import DataLoader, TensorDataset
from accelerate import DistributedType, infer_auto_device_map, init_empty_weights
from accelerate.accelerator import Accelerator
from accelerate.state import GradientState, PartialState
from accelerate.test_utils import require_bnb, require_multi_gpu, slow
from accelerate.test_utils.testing import AccelerateTestCase, require_cuda
from accelerate.utils import patch_environment
def create_components():
model = torch.nn.Linear(2, 4)
optimizer = torch.optim.AdamW(model.parameters(), lr=1.0)
scheduler = torch.optim.lr_scheduler.OneCycleLR(optimizer, max_lr=0.01, steps_per_epoch=2, epochs=1)
train_dl = DataLoader(TensorDataset(torch.tensor([1, 2, 3])))
valid_dl = DataLoader(TensorDataset(torch.tensor([4, 5, 6])))
return model, optimizer, scheduler, train_dl, valid_dl
def get_signature(model):
return (model.weight.abs().sum() + model.bias.abs().sum()).item()
def load_random_weights(model):
state = torch.nn.Linear(*tuple(model.weight.T.shape)).state_dict()
model.load_state_dict(state)
class AcceleratorTester(AccelerateTestCase):
@require_cuda
def test_accelerator_can_be_reinstantiated(self):
_ = Accelerator()
assert PartialState._shared_state["_cpu"] is False
assert PartialState._shared_state["device"].type == "cuda"
with self.assertRaises(ValueError):
_ = Accelerator(cpu=True)
def test_mutable_states(self):
accelerator = Accelerator()
state = GradientState()
assert state.num_steps == 1
accelerator.gradient_accumulation_steps = 4
assert state.num_steps == 4
assert state.sync_gradients is True
accelerator.sync_gradients = False
assert state.sync_gradients is False
GradientState._reset_state()
def test_prepared_objects_are_referenced(self):
accelerator = Accelerator()
model, optimizer, scheduler, train_dl, valid_dl = create_components()
(
prepared_model,
prepared_optimizer,
prepared_scheduler,
prepared_train_dl,
prepared_valid_dl,
) = accelerator.prepare(model, optimizer, scheduler, train_dl, valid_dl)
self.assertTrue(prepared_model in accelerator._models)
self.assertTrue(prepared_optimizer in accelerator._optimizers)
self.assertTrue(prepared_scheduler in accelerator._schedulers)
self.assertTrue(prepared_train_dl in accelerator._dataloaders)
self.assertTrue(prepared_valid_dl in accelerator._dataloaders)
def test_free_memory_dereferences_prepared_components(self):
accelerator = Accelerator()
model, optimizer, scheduler, train_dl, valid_dl = create_components()
accelerator.prepare(model, optimizer, scheduler, train_dl, valid_dl)
accelerator.free_memory()
self.assertTrue(len(accelerator._models) == 0)
self.assertTrue(len(accelerator._optimizers) == 0)
self.assertTrue(len(accelerator._schedulers) == 0)
self.assertTrue(len(accelerator._dataloaders) == 0)
def test_env_var_device(self):
"""Tests that setting the torch device with ACCELERATE_TORCH_DEVICE overrides default device."""
PartialState._reset_state()
# Mock torch.cuda.set_device to avoid an exception as the device doesn't exist
def noop(*args, **kwargs):
pass
with patch("torch.cuda.set_device", noop), patch_environment(ACCELERATE_TORCH_DEVICE="cuda:64"):
accelerator = Accelerator()
self.assertEqual(str(accelerator.state.device), "cuda:64")
def test_save_load_model(self):
accelerator = Accelerator()
model, optimizer, scheduler, train_dl, valid_dl = create_components()
accelerator.prepare(model, optimizer, scheduler, train_dl, valid_dl)
model_signature = get_signature(model)
with tempfile.TemporaryDirectory() as tmpdirname:
accelerator.save_state(tmpdirname)
# make sure random weights don't match
load_random_weights(model)
self.assertTrue(abs(model_signature - get_signature(model)) > 1e-3)
# make sure loaded weights match
accelerator.load_state(tmpdirname)
self.assertTrue(abs(model_signature - get_signature(model)) < 1e-3)
def test_save_load_model_with_hooks(self):
accelerator = Accelerator()
model, optimizer, scheduler, train_dl, valid_dl = create_components()
accelerator.prepare(model, optimizer, scheduler, train_dl, valid_dl)
model_signature = get_signature(model)
# saving hook
def save_config(models, weights, output_dir):
config = {"class_name": models[0].__class__.__name__}
with open(os.path.join(output_dir, "data.json"), "w") as f:
json.dump(config, f)
# loading hook
def load_config(models, input_dir):
with open(os.path.join(input_dir, "data.json"), "r") as f:
config = json.load(f)
models[0].class_name = config["class_name"]
save_hook = accelerator.register_save_state_pre_hook(save_config)
load_hook = accelerator.register_load_state_pre_hook(load_config)
with tempfile.TemporaryDirectory() as tmpdirname:
accelerator.save_state(tmpdirname)
# make sure random weights don't match with hooks
load_random_weights(model)
self.assertTrue(abs(model_signature - get_signature(model)) > 1e-3)
# random class name to verify correct one is loaded
model.class_name = "random"
# make sure loaded weights match with hooks
accelerator.load_state(tmpdirname)
self.assertTrue(abs(model_signature - get_signature(model)) < 1e-3)
# mode.class_name is loaded from config
self.assertTrue(model.class_name == model.__class__.__name__)
# remove hooks
save_hook.remove()
load_hook.remove()
with tempfile.TemporaryDirectory() as tmpdirname:
accelerator.save_state(tmpdirname)
# make sure random weights don't match with hooks removed
load_random_weights(model)
self.assertTrue(abs(model_signature - get_signature(model)) > 1e-3)
# random class name to verify correct one is loaded
model.class_name = "random"
# make sure loaded weights match with hooks removed
accelerator.load_state(tmpdirname)
self.assertTrue(abs(model_signature - get_signature(model)) < 1e-3)
# mode.class_name is NOT loaded from config
self.assertTrue(model.class_name != model.__class__.__name__)
def test_accelerator_none(self):
"""Just test that passing None to accelerator.prepare() works."""
accelerator = Accelerator()
model, optimizer, scheduler, train_dl, valid_dl = create_components()
dummy_obj = None
# This should work
model, optimizer, scheduler, train_dl, valid_dl, dummy_obj = accelerator.prepare(
model, optimizer, scheduler, train_dl, valid_dl, dummy_obj
)
self.assertTrue(dummy_obj is None)
def test_is_accelerator_prepared(self):
"""Checks that `_is_accelerator_prepared` is set properly"""
accelerator = Accelerator()
model, optimizer, scheduler, train_dl, valid_dl = create_components()
dummy_obj = [1, 2, 3]
# This should work
model, optimizer, scheduler, train_dl, valid_dl, dummy_obj = accelerator.prepare(
model, optimizer, scheduler, train_dl, valid_dl, dummy_obj
)
self.assertEqual(
getattr(dummy_obj, "_is_accelerate_prepared", False),
False,
"Dummy object should have `_is_accelerate_prepared` set to `True`",
)
self.assertEqual(
getattr(model, "_is_accelerate_prepared", False),
True,
"Model is missing `_is_accelerator_prepared` or is set to `False`",
)
self.assertEqual(
getattr(optimizer, "_is_accelerate_prepared", False),
True,
"Optimizer is missing `_is_accelerator_prepared` or is set to `False`",
)
self.assertEqual(
getattr(scheduler, "_is_accelerate_prepared", False),
True,
"Scheduler is missing `_is_accelerator_prepared` or is set to `False`",
)
self.assertEqual(
getattr(train_dl, "_is_accelerate_prepared", False),
True,
"Train Dataloader is missing `_is_accelerator_prepared` or is set to `False`",
)
self.assertEqual(
getattr(valid_dl, "_is_accelerate_prepared", False),
True,
"Valid Dataloader is missing `_is_accelerator_prepared` or is set to `False`",
)
@slow
@require_bnb
def test_accelerator_bnb(self):
"""Tests that the accelerator can be used with the BNB library."""
from transformers import AutoModelForCausalLM
model = AutoModelForCausalLM.from_pretrained(
"EleutherAI/gpt-neo-125m",
load_in_8bit=True,
device_map={"": 0},
)
accelerator = Accelerator()
# This should work
model = accelerator.prepare(model)
@slow
@require_bnb
def test_accelerator_bnb_cpu_error(self):
"""Tests that the accelerator can be used with the BNB library. This should fail as we are trying to load a model
that is loaded between cpu and gpu"""
from transformers import AutoModelForCausalLM
accelerator = Accelerator()
with init_empty_weights():
model = AutoModelForCausalLM.from_pretrained(
"EleutherAI/gpt-neo-125m",
)
model.tie_weights()
device_map = infer_auto_device_map(model)
device_map["lm_head"] = "cpu"
model = AutoModelForCausalLM.from_pretrained(
"EleutherAI/gpt-neo-125m", device_map=device_map, load_in_8bit=True, llm_int8_enable_fp32_cpu_offload=True
)
# This should not work and get value error
with self.assertRaises(ValueError):
model = accelerator.prepare(model)
@slow
@require_bnb
@require_multi_gpu
def test_accelerator_bnb_multi_gpu(self):
"""Tests that the accelerator can be used with the BNB library."""
from transformers import AutoModelForCausalLM
PartialState._shared_state = {"distributed_type": DistributedType.MULTI_GPU}
with init_empty_weights():
model = AutoModelForCausalLM.from_pretrained(
"EleutherAI/gpt-neo-125m",
)
model.tie_weights()
device_map = infer_auto_device_map(model)
device_map["lm_head"] = 1
model = AutoModelForCausalLM.from_pretrained(
"EleutherAI/gpt-neo-125m",
load_in_8bit=True,
device_map=device_map,
)
accelerator = Accelerator()
# This should not work and get value error
with self.assertRaises(ValueError):
_ = accelerator.prepare(model)
PartialState._reset_state()
@slow
@require_bnb
@require_multi_gpu
def test_accelerator_bnb_multi_gpu_no_distributed(self):
"""Tests that the accelerator can be used with the BNB library."""
from transformers import AutoModelForCausalLM
with init_empty_weights():
model = AutoModelForCausalLM.from_pretrained(
"EleutherAI/gpt-neo-125m",
)
device_map = infer_auto_device_map(model)
device_map["lm_head"] = 1
model = AutoModelForCausalLM.from_pretrained(
"EleutherAI/gpt-neo-125m",
load_in_8bit=True,
device_map=device_map,
)
accelerator = Accelerator()
# This should work
_ = accelerator.prepare(model)
@require_cuda
def test_accelerator_cpu_flag_prepare(self):
model = torch.nn.Linear(10, 10)
sgd = torch.optim.SGD(model.parameters(), lr=0.01)
accelerator = Accelerator(cpu=True)
_ = accelerator.prepare(sgd)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_grad_sync.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import os
import unittest
import torch
import accelerate
from accelerate import debug_launcher
from accelerate.test_utils import (
execute_subprocess_async,
require_cpu,
require_multi_gpu,
require_single_gpu,
test_sync,
)
from accelerate.utils import patch_environment
class SyncScheduler(unittest.TestCase):
def setUp(self):
mod_file = inspect.getfile(accelerate.test_utils)
self.test_file_path = os.path.sep.join(mod_file.split(os.path.sep)[:-1] + ["scripts", "test_sync.py"])
@require_cpu
def test_gradient_sync_cpu_noop(self):
debug_launcher(test_sync.main, num_processes=1)
@require_cpu
def test_gradient_sync_cpu_multi(self):
debug_launcher(test_sync.main)
@require_single_gpu
def test_gradient_sync_gpu(self):
test_sync.main()
@require_multi_gpu
def test_gradient_sync_gpu_multi(self):
print(f"Found {torch.cuda.device_count()} devices.")
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", self.test_file_path]
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd, env=os.environ.copy())
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_cpu.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import unittest
from accelerate import debug_launcher
from accelerate.test_utils import require_cpu, test_ops, test_script
@require_cpu
class MultiCPUTester(unittest.TestCase):
def test_cpu(self):
debug_launcher(test_script.main)
def test_ops(self):
debug_launcher(test_ops.main)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_multigpu.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import os
import unittest
import torch
import accelerate
from accelerate import Accelerator
from accelerate.test_utils import execute_subprocess_async, require_multi_gpu
from accelerate.utils import patch_environment
class MultiGPUTester(unittest.TestCase):
def setUp(self):
mod_file = inspect.getfile(accelerate.test_utils)
self.test_file_path = os.path.sep.join(mod_file.split(os.path.sep)[:-1] + ["scripts", "test_script.py"])
self.data_loop_file_path = os.path.sep.join(
mod_file.split(os.path.sep)[:-1] + ["scripts", "test_distributed_data_loop.py"]
)
self.operation_file_path = os.path.sep.join(mod_file.split(os.path.sep)[:-1] + ["scripts", "test_ops.py"])
@require_multi_gpu
def test_multi_gpu(self):
print(f"Found {torch.cuda.device_count()} devices.")
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", self.test_file_path]
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd, env=os.environ.copy())
@require_multi_gpu
def test_multi_gpu_ops(self):
print(f"Found {torch.cuda.device_count()} devices.")
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", self.operation_file_path]
print(f"Command: {cmd}")
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd, env=os.environ.copy())
@require_multi_gpu
def test_pad_across_processes(self):
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", inspect.getfile(self.__class__)]
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd, env=os.environ.copy())
@require_multi_gpu
def test_distributed_data_loop(self):
"""
This TestCase checks the behaviour that occurs during distributed training or evaluation,
when the batch size does not evenly divide the dataset size.
"""
print(f"Found {torch.cuda.device_count()} devices, using 2 devices only")
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", self.data_loop_file_path]
with patch_environment(omp_num_threads=1, cuda_visible_devices="0,1"):
execute_subprocess_async(cmd, env=os.environ.copy())
if __name__ == "__main__":
accelerator = Accelerator()
shape = (accelerator.state.process_index + 2, 10)
tensor = torch.randint(0, 10, shape).to(accelerator.device)
error_msg = ""
tensor1 = accelerator.pad_across_processes(tensor)
if tensor1.shape[0] != accelerator.state.num_processes + 1:
error_msg += f"Found shape {tensor1.shape} but should have {accelerator.state.num_processes + 1} at dim 0."
if not torch.equal(tensor1[: accelerator.state.process_index + 2], tensor):
error_msg += "Tensors have different values."
if not torch.all(tensor1[accelerator.state.process_index + 2 :] == 0):
error_msg += "Padding was not done with the right value (0)."
tensor2 = accelerator.pad_across_processes(tensor, pad_first=True)
if tensor2.shape[0] != accelerator.state.num_processes + 1:
error_msg += f"Found shape {tensor2.shape} but should have {accelerator.state.num_processes + 1} at dim 0."
index = accelerator.state.num_processes - accelerator.state.process_index - 1
if not torch.equal(tensor2[index:], tensor):
error_msg += "Tensors have different values."
if not torch.all(tensor2[:index] == 0):
error_msg += "Padding was not done with the right value (0)."
# Raise error at the end to make sure we don't stop at the first failure.
if len(error_msg) > 0:
raise ValueError(error_msg)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_optimizer.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import pickle
import unittest
import torch
from accelerate import Accelerator
from accelerate.state import AcceleratorState
from accelerate.test_utils import require_cpu, require_cuda
@require_cpu
class OptimizerTester(unittest.TestCase):
def test_accelerated_optimizer_pickling(self):
model = torch.nn.Linear(10, 10)
optimizer = torch.optim.SGD(model.parameters(), 0.1)
accelerator = Accelerator()
optimizer = accelerator.prepare(optimizer)
try:
pickle.loads(pickle.dumps(optimizer))
except Exception as e:
self.fail(f"Accelerated optimizer pickling failed with {e}")
AcceleratorState._reset_state()
@require_cuda
class CudaOptimizerTester(unittest.TestCase):
def test_accelerated_optimizer_step_was_skipped(self):
model = torch.nn.Linear(5, 5)
optimizer = torch.optim.SGD(model.parameters(), 0.1)
accelerator = Accelerator(mixed_precision="fp16")
model, optimizer = accelerator.prepare(model, optimizer)
loss = model(torch.randn(2, 5, device=accelerator.device)).sum()
accelerator.backward(loss)
for p in model.parameters():
# Fake the gradients, as if there's no overflow
p.grad.fill_(0.01)
optimizer.step()
self.assertTrue(optimizer.step_was_skipped is False)
loss = model(torch.randn(2, 5, device=accelerator.device)).sum()
accelerator.backward(loss)
for p in model.parameters():
p.grad.fill_(0.01)
# Manually set the gradients to be NaN, as if there's an overflow
p.grad[0] = torch.tensor(float("nan"))
optimizer.step()
self.assertTrue(optimizer.step_was_skipped is True)
loss = model(torch.randn(2, 5, device=accelerator.device)).sum()
accelerator.backward(loss)
for p in model.parameters():
p.grad.fill_(0.01)
# Manually set the gradients to be NaN, as if there's an overflow
p.grad[0] = torch.tensor(float("nan"))
optimizer.step()
self.assertTrue(optimizer.step_was_skipped is True)
loss = model(torch.randn(2, 5, device=accelerator.device)).sum()
accelerator.backward(loss)
for p in model.parameters():
# Fake the gradients, as if there's no overflow
p.grad.fill_(0.01)
optimizer.step()
self.assertTrue(optimizer.step_was_skipped is False)
AcceleratorState._reset_state()
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_hooks.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import unittest
import torch
import torch.nn as nn
from accelerate.hooks import (
AlignDevicesHook,
ModelHook,
SequentialHook,
add_hook_to_module,
attach_align_device_hook,
remove_hook_from_module,
remove_hook_from_submodules,
)
from accelerate.test_utils import require_multi_gpu
class ModelForTest(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(3, 4)
self.batchnorm = nn.BatchNorm1d(4)
self.linear2 = nn.Linear(4, 5)
def forward(self, x):
return self.linear2(self.batchnorm(self.linear1(x)))
class PreForwardHook(ModelHook):
def pre_forward(self, module, *args, **kwargs):
return (args[0] + 1,) + args[1:], kwargs
class PostForwardHook(ModelHook):
def post_forward(self, module, output):
return output + 1
class HooksModelTester(unittest.TestCase):
def test_add_and_remove_hooks(self):
test_model = ModelForTest()
test_hook = ModelHook()
add_hook_to_module(test_model, test_hook)
self.assertEqual(test_model._hf_hook, test_hook)
self.assertTrue(hasattr(test_model, "_old_forward"))
# Check adding the hook did not change the name or the signature
self.assertEqual(test_model.forward.__name__, "forward")
self.assertListEqual(list(inspect.signature(test_model.forward).parameters), ["x"])
remove_hook_from_module(test_model)
self.assertFalse(hasattr(test_model, "_hf_hook"))
self.assertFalse(hasattr(test_model, "_old_forward"))
def test_append_and_remove_hooks(self):
test_model = ModelForTest()
test_hook = ModelHook()
add_hook_to_module(test_model, test_hook)
add_hook_to_module(test_model, test_hook, append=True)
self.assertEqual(isinstance(test_model._hf_hook, SequentialHook), True)
self.assertEqual(len(test_model._hf_hook.hooks), 2)
self.assertTrue(hasattr(test_model, "_old_forward"))
# Check adding the hook did not change the name or the signature
self.assertEqual(test_model.forward.__name__, "forward")
self.assertListEqual(list(inspect.signature(test_model.forward).parameters), ["x"])
remove_hook_from_module(test_model)
self.assertFalse(hasattr(test_model, "_hf_hook"))
self.assertFalse(hasattr(test_model, "_old_forward"))
def test_pre_forward_hook_is_executed(self):
test_model = ModelForTest()
x = torch.randn(2, 3)
expected = test_model(x + 1)
expected2 = test_model(x + 2)
test_hook = PreForwardHook()
add_hook_to_module(test_model, test_hook)
output1 = test_model(x)
self.assertTrue(torch.allclose(output1, expected, atol=1e-5))
# Attaching a hook to a model when it already has one replaces, does not chain
test_hook = PreForwardHook()
add_hook_to_module(test_model, test_hook)
output1 = test_model(x)
self.assertTrue(torch.allclose(output1, expected, atol=1e-5))
# You need to use the sequential hook to chain two or more hooks
test_hook = SequentialHook(PreForwardHook(), PreForwardHook())
add_hook_to_module(test_model, test_hook)
output2 = test_model(x)
assert torch.allclose(output2, expected2, atol=1e-5)
def test_post_forward_hook_is_executed(self):
test_model = ModelForTest()
x = torch.randn(2, 3)
output = test_model(x)
test_hook = PostForwardHook()
add_hook_to_module(test_model, test_hook)
output1 = test_model(x)
self.assertTrue(torch.allclose(output1, output + 1, atol=1e-5))
# Attaching a hook to a model when it already has one replaces, does not chain
test_hook = PostForwardHook()
add_hook_to_module(test_model, test_hook)
output1 = test_model(x)
self.assertTrue(torch.allclose(output1, output + 1, atol=1e-5))
# You need to use the sequential hook to chain two or more hooks
test_hook = SequentialHook(PostForwardHook(), PostForwardHook())
add_hook_to_module(test_model, test_hook)
output2 = test_model(x)
assert torch.allclose(output2, output + 2, atol=1e-5)
def test_no_grad_in_hook(self):
test_model = ModelForTest()
x = torch.randn(2, 3)
output = test_model(x)
test_hook = PostForwardHook()
add_hook_to_module(test_model, test_hook)
output1 = test_model(x)
self.assertTrue(torch.allclose(output1, output + 1))
self.assertTrue(output1.requires_grad)
test_hook.no_grad = True
output1 = test_model(x)
self.assertFalse(output1.requires_grad)
@require_multi_gpu
def test_align_devices_as_model_parallelism(self):
model = ModelForTest()
# Everything is on CPU
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# This will move each submodule on different devices
add_hook_to_module(model.linear1, AlignDevicesHook(execution_device=0))
add_hook_to_module(model.batchnorm, AlignDevicesHook(execution_device=0))
add_hook_to_module(model.linear2, AlignDevicesHook(execution_device=1))
self.assertEqual(model.linear1.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.weight.device, torch.device(0))
self.assertEqual(model.batchnorm.running_mean.device, torch.device(0))
self.assertEqual(model.linear2.weight.device, torch.device(1))
# We can still make a forward pass. The input does not need to be on any particular device
x = torch.randn(2, 3)
output = model(x)
self.assertEqual(output.device, torch.device(1))
# We can add a general hook to put back output on same device as input.
add_hook_to_module(model, AlignDevicesHook(io_same_device=True))
x = torch.randn(2, 3).to(0)
output = model(x)
self.assertEqual(output.device, torch.device(0))
def test_align_devices_as_cpu_offload(self):
model = ModelForTest()
# Everything is on CPU
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# This will move each submodule on different devices
hook_kwargs = {"execution_device": 0 if torch.cuda.is_available() else "cpu", "offload": True}
add_hook_to_module(model.linear1, AlignDevicesHook(**hook_kwargs))
add_hook_to_module(model.batchnorm, AlignDevicesHook(**hook_kwargs))
add_hook_to_module(model.linear2, AlignDevicesHook(**hook_kwargs))
# Parameters have been offloaded, so on the meta device
self.assertEqual(model.linear1.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
self.assertEqual(model.linear2.weight.device, torch.device("meta"))
# Buffers are not included in the offload by default, so are on the execution device
device = torch.device(hook_kwargs["execution_device"])
self.assertEqual(model.batchnorm.running_mean.device, device)
x = torch.randn(2, 3)
output = model(x)
self.assertEqual(output.device, device)
# Removing hooks loads back the weights in the model.
remove_hook_from_module(model.linear1)
remove_hook_from_module(model.batchnorm)
remove_hook_from_module(model.linear2)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# Now test with buffers included in the offload
hook_kwargs = {
"execution_device": 0 if torch.cuda.is_available() else "cpu",
"offload": True,
"offload_buffers": True,
}
add_hook_to_module(model.linear1, AlignDevicesHook(**hook_kwargs))
add_hook_to_module(model.batchnorm, AlignDevicesHook(**hook_kwargs))
add_hook_to_module(model.linear2, AlignDevicesHook(**hook_kwargs))
# Parameters have been offloaded, so on the meta device, buffers included
self.assertEqual(model.linear1.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
self.assertEqual(model.linear2.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.running_mean.device, torch.device("meta"))
x = torch.randn(2, 3)
output = model(x)
self.assertEqual(output.device, device)
# Removing hooks loads back the weights in the model.
remove_hook_from_module(model.linear1)
remove_hook_from_module(model.batchnorm)
remove_hook_from_module(model.linear2)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
def test_attach_align_device_hook_as_cpu_offload(self):
model = ModelForTest()
# Everything is on CPU
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# This will move each submodule on different devices
execution_device = 0 if torch.cuda.is_available() else "cpu"
attach_align_device_hook(model, execution_device=execution_device, offload=True)
# Parameters have been offloaded, so on the meta device
self.assertEqual(model.linear1.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
self.assertEqual(model.linear2.weight.device, torch.device("meta"))
# Buffers are not included in the offload by default, so are on the execution device
device = torch.device(execution_device)
self.assertEqual(model.batchnorm.running_mean.device, device)
x = torch.randn(2, 3)
output = model(x)
self.assertEqual(output.device, device)
# Removing hooks loads back the weights in the model.
remove_hook_from_submodules(model)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# Now test with buffers included in the offload
attach_align_device_hook(model, execution_device=execution_device, offload=True, offload_buffers=True)
# Parameters have been offloaded, so on the meta device, buffers included
self.assertEqual(model.linear1.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
self.assertEqual(model.linear2.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.running_mean.device, torch.device("meta"))
x = torch.randn(2, 3)
output = model(x)
self.assertEqual(output.device, device)
# Removing hooks loads back the weights in the model.
remove_hook_from_submodules(model)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
def test_attach_align_device_hook_as_cpu_offload_with_weight_map(self):
model = ModelForTest()
# Everything is on CPU
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# This will move each submodule on different devices
execution_device = 0 if torch.cuda.is_available() else "cpu"
attach_align_device_hook(
model, execution_device=execution_device, offload=True, weights_map=model.state_dict()
)
# Parameters have been offloaded, so on the meta device
self.assertEqual(model.linear1.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
self.assertEqual(model.linear2.weight.device, torch.device("meta"))
# Buffers are not included in the offload by default, so are on the execution device
device = torch.device(execution_device)
self.assertEqual(model.batchnorm.running_mean.device, device)
x = torch.randn(2, 3)
output = model(x)
self.assertEqual(output.device, device)
# Removing hooks loads back the weights in the model.
remove_hook_from_submodules(model)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
# Now test with buffers included in the offload
attach_align_device_hook(
model,
execution_device=execution_device,
offload=True,
weights_map=model.state_dict(),
offload_buffers=True,
)
# Parameters have been offloaded, so on the meta device, buffers included
self.assertEqual(model.linear1.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.weight.device, torch.device("meta"))
self.assertEqual(model.linear2.weight.device, torch.device("meta"))
self.assertEqual(model.batchnorm.running_mean.device, torch.device("meta"))
x = torch.randn(2, 3)
output = model(x)
self.assertEqual(output.device, device)
# Removing hooks loads back the weights in the model.
remove_hook_from_submodules(model)
self.assertEqual(model.linear1.weight.device, torch.device("cpu"))
self.assertEqual(model.batchnorm.weight.device, torch.device("cpu"))
self.assertEqual(model.linear2.weight.device, torch.device("cpu"))
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_quantization.py
|
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import gc
import tempfile
import unittest
import torch
import torch.nn as nn
from accelerate import Accelerator, init_empty_weights
from accelerate.test_utils import require_bnb, require_cuda, require_huggingface_suite, require_multi_gpu, slow
from accelerate.utils.bnb import load_and_quantize_model
from accelerate.utils.dataclasses import BnbQuantizationConfig
class BitsAndBytesConfigIntegration(unittest.TestCase):
def test_BnbQuantizationConfig(self):
with self.assertRaises(ValueError):
BnbQuantizationConfig(load_in_8bit=True, load_in_4bit=True)
@slow
@require_cuda
@require_bnb
@require_huggingface_suite
class MixedInt8EmptyModelTest(unittest.TestCase):
# We keep the constants inside the init function and model loading inside setUp function
# We need to test on relatively large models (aka >1b parameters otherwise the quantiztion may not work as expected)
# Therefore here we use only bloom-1b3 to test our module
model_name = "marcsun13/bloom-1b7_with_lm_head"
# Constant values
# This was obtained on a Quadro RTX 8000 so the number might slightly change
EXPECTED_RELATIVE_DIFFERENCE = 1.540025
input_text = "Hello my name is"
EXPECTED_OUTPUT = "Hello my name is John.\nI am a friend of the family.\n"
MAX_NEW_TOKENS = 10
def setUp(self):
"""
Setup quantized model from empty model
"""
from huggingface_hub import hf_hub_download
from transformers import AutoConfig, AutoModelForCausalLM, AutoTokenizer
# Models and tokenizer
self.model_fp16 = AutoModelForCausalLM.from_pretrained(
self.model_name, torch_dtype=torch.float16, device_map="auto"
)
# create model on meta device
with init_empty_weights():
self.model_8bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
self.model_8bit.tie_weights()
self.weights_location = hf_hub_download(self.model_name, "pytorch_model.bin")
self.bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
self.model_8bit = load_and_quantize_model(
self.model_8bit,
self.bnb_quantization_config,
weights_location=self.weights_location,
device_map={"": 0},
no_split_module_classes=["BloomBlock"],
)
self.tokenizer = AutoTokenizer.from_pretrained("bigscience/bloom-1b7")
self.accelerate = Accelerator()
def tearDown(self):
r"""
TearDown function needs to be called at the end of each test to free the GPU memory and cache, also to
avoid unexpected behaviors. Please see: https://discuss.pytorch.org/t/how-can-we-release-gpu-memory-cache/14530/27
"""
del self.model_fp16
del self.model_8bit
gc.collect()
torch.cuda.empty_cache()
def test_memory_footprint(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
from bitsandbytes.nn import Int8Params
mem_fp16 = self.model_fp16.get_memory_footprint()
mem_8bit = self.model_8bit.get_memory_footprint()
self.assertAlmostEqual(mem_fp16 / mem_8bit, self.EXPECTED_RELATIVE_DIFFERENCE)
self.assertTrue(self.model_8bit.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
def test_linear_are_8bit(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
self.model_fp16.get_memory_footprint()
self.model_8bit.get_memory_footprint()
for name, module in self.model_8bit.named_modules():
if isinstance(module, torch.nn.Linear):
modules_not_converted = (
self.bnb_quantization_config.keep_in_fp32_modules + self.bnb_quantization_config.skip_modules
)
if name not in modules_not_converted:
self.assertTrue(module.weight.dtype == torch.int8)
def test_llm_skip(self):
r"""
A simple test to check if `llm_int8_skip_modules` works as expected
"""
import bitsandbytes as bnb
from transformers import AutoConfig, AutoModelForCausalLM
bnb_quantization_config = BnbQuantizationConfig(
load_in_8bit=True, skip_modules=["lm_head", "transformer.word_embeddings"]
)
with init_empty_weights():
model = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model.tie_weights()
model = load_and_quantize_model(
model,
bnb_quantization_config,
weights_location=self.weights_location,
device_map="auto",
no_split_module_classes=["BloomBlock"],
)
self.assertTrue(model.transformer.h[1].mlp.dense_4h_to_h.weight.dtype == torch.int8)
self.assertTrue(isinstance(model.transformer.h[1].mlp.dense_4h_to_h, bnb.nn.Linear8bitLt))
self.assertTrue(isinstance(model.lm_head, nn.Linear))
self.assertTrue(model.lm_head.weight.dtype != torch.int8)
def check_inference_correctness(self, model):
r"""
Test the generation quality of the quantized model and see that we are matching the expected output.
Given that we are operating on small numbers + the testing model is relatively small, we might not get
the same output across GPUs. So we'll generate few tokens (5-10) and check their output.
"""
# Check that inference pass works on the model
encoded_input = self.tokenizer(self.input_text, return_tensors="pt")
# Check the exactness of the results
output_parallel = model.generate(input_ids=encoded_input["input_ids"].to(0), max_new_tokens=10)
# Get the generation
output_text = self.tokenizer.decode(output_parallel[0], skip_special_tokens=True)
self.assertEqual(output_text, self.EXPECTED_OUTPUT)
def test_generate_quality(self):
self.check_inference_correctness(self.model_8bit)
def test_fp32_8bit_conversion(self):
r"""
Test whether it is possible to mix both `8bit` and `fp32` weights when using `keep_in_fp32_modules` correctly.
"""
from transformers import AutoConfig, AutoModelForCausalLM
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True, keep_in_fp32_modules=["lm_head"])
with init_empty_weights():
model = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model.tie_weights()
model = load_and_quantize_model(
model,
bnb_quantization_config,
weights_location=self.weights_location,
device_map="auto",
no_split_module_classes=["BloomBlock"],
)
self.assertTrue(model.lm_head.weight.dtype == torch.float32)
@require_multi_gpu
def test_cpu_gpu_loading_custom_device_map(self):
from bitsandbytes.nn import Int8Params
from transformers import AutoConfig, AutoModelForCausalLM
r"""
A test to check is dispatching a model on cpu & gpu works correctly using a custom `device_map`.
"""
device_map = {
"transformer.word_embeddings": "cpu",
"transformer.word_embeddings_layernorm": 0,
"lm_head": "cpu",
"transformer.h.0": "cpu",
"transformer.h.1": "cpu",
"transformer.h.2": "cpu",
"transformer.h.3": 0,
"transformer.h.4": 0,
"transformer.h.5": 0,
"transformer.h.6": 0,
"transformer.h.7": 0,
"transformer.h.8": 0,
"transformer.h.9": 1,
"transformer.h.10": 0,
"transformer.h.11": 1,
"transformer.h.12": 0,
"transformer.h.13": 0,
"transformer.h.14": 1,
"transformer.h.15": 0,
"transformer.h.16": 0,
"transformer.h.17": 1,
"transformer.h.18": 1,
"transformer.h.19": 0,
"transformer.h.20": 1,
"transformer.h.21": 1,
"transformer.h.22": 0,
"transformer.h.23": 0,
"transformer.ln_f": 1,
}
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
with init_empty_weights():
model_8bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_8bit.tie_weights()
model_8bit = load_and_quantize_model(
model_8bit,
bnb_quantization_config,
weights_location=self.weights_location,
device_map=device_map,
no_split_module_classes=["BloomBlock"],
)
self.assertTrue(model_8bit.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.assertTrue(model_8bit.transformer.h[1].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.check_inference_correctness(model_8bit)
@require_multi_gpu
def test_cpu_gpu_loading_custom_device_map_offload_state_dict(self):
from bitsandbytes.nn import Int8Params
from transformers import AutoConfig, AutoModelForCausalLM
r"""
A test to check is dispatching a model on cpu & gpu works correctly using a custom `device_map` and offload_state_dict=True.
"""
device_map = {
"transformer.word_embeddings": "cpu",
"transformer.word_embeddings_layernorm": 0,
"lm_head": "cpu",
"transformer.h.0": "cpu",
"transformer.h.1": "cpu",
"transformer.h.2": "cpu",
"transformer.h.3": 0,
"transformer.h.4": 0,
"transformer.h.5": 0,
"transformer.h.6": 0,
"transformer.h.7": 0,
"transformer.h.8": 0,
"transformer.h.9": 1,
"transformer.h.10": 0,
"transformer.h.11": 1,
"transformer.h.12": 0,
"transformer.h.13": 0,
"transformer.h.14": 1,
"transformer.h.15": 0,
"transformer.h.16": 0,
"transformer.h.17": 1,
"transformer.h.18": 1,
"transformer.h.19": 0,
"transformer.h.20": 1,
"transformer.h.21": 1,
"transformer.h.22": 0,
"transformer.h.23": 0,
"transformer.ln_f": 1,
}
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
with init_empty_weights():
model_8bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_8bit.tie_weights()
model_8bit = load_and_quantize_model(
model_8bit,
bnb_quantization_config,
weights_location=self.weights_location,
device_map=device_map,
no_split_module_classes=["BloomBlock"],
offload_state_dict=True,
)
self.assertTrue(model_8bit.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.assertTrue(model_8bit.transformer.h[1].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.check_inference_correctness(model_8bit)
@require_multi_gpu
def test_cpu_gpu_disk_loading_custom_device_map_kwargs(self):
from bitsandbytes.nn import Int8Params
from transformers import AutoConfig, AutoModelForCausalLM
r"""
A test to check is dispatching a model on cpu & gpu works correctly using a custom `device_map`.
This time we also add `disk` on the device_map - using the kwargs directly instead of the quantization config
"""
device_map = {
"transformer.word_embeddings": "cpu",
"transformer.word_embeddings_layernorm": 0,
"lm_head": "cpu",
"transformer.h.0": "cpu",
"transformer.h.1": "cpu",
"transformer.h.2": "cpu",
"transformer.h.3": "disk",
"transformer.h.4": "disk",
"transformer.h.5": "disk",
"transformer.h.6": 0,
"transformer.h.7": 0,
"transformer.h.8": 0,
"transformer.h.9": 1,
"transformer.h.10": 0,
"transformer.h.11": 1,
"transformer.h.12": 0,
"transformer.h.13": 0,
"transformer.h.14": 1,
"transformer.h.15": 0,
"transformer.h.16": 0,
"transformer.h.17": 1,
"transformer.h.18": 1,
"transformer.h.19": 0,
"transformer.h.20": 1,
"transformer.h.21": 1,
"transformer.h.22": 0,
"transformer.h.23": 0,
"transformer.ln_f": 1,
}
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
with init_empty_weights():
model_8bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_8bit.tie_weights()
with tempfile.TemporaryDirectory() as tmpdirname:
model_8bit = load_and_quantize_model(
model_8bit,
bnb_quantization_config,
weights_location=self.weights_location,
device_map=device_map,
no_split_module_classes=["BloomBlock"],
offload_folder=tmpdirname,
offload_state_dict=True,
)
self.assertTrue(model_8bit.transformer.h[4].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.assertTrue(model_8bit.transformer.h[5].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.check_inference_correctness(model_8bit)
def test_int8_serialization(self):
r"""
Test whether it is possible to serialize a model in 8-bit.
"""
from bitsandbytes.nn import Int8Params
from transformers import AutoConfig, AutoModelForCausalLM
with tempfile.TemporaryDirectory() as tmpdirname:
# saving state dict for now but will save config and other in the future
self.accelerate.save_model(self.model_8bit, tmpdirname)
with init_empty_weights():
# let's suppose that we can get the right config
model_8bit_from_saved = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_8bit_from_saved.tie_weights()
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
model_8bit_from_saved = load_and_quantize_model(
model_8bit_from_saved,
bnb_quantization_config,
weights_location=tmpdirname,
device_map="auto",
no_split_module_classes=["BloomBlock"],
)
self.assertTrue(model_8bit_from_saved.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.assertTrue(hasattr(model_8bit_from_saved.transformer.h[0].mlp.dense_4h_to_h.weight, "SCB"))
self.assertTrue(hasattr(model_8bit_from_saved.transformer.h[0].mlp.dense_4h_to_h.weight, "CB"))
self.check_inference_correctness(model_8bit_from_saved)
@require_multi_gpu
def test_int8_serialization_offload(self):
r"""
Test whether it is possible to serialize a model in 8-bit and offload weights to cpu/disk
"""
from bitsandbytes.nn import Int8Params
from transformers import AutoConfig, AutoModelForCausalLM
with tempfile.TemporaryDirectory() as tmpdirname:
# saving state dict for now but will save config and other in the future
self.accelerate.save_model(self.model_8bit, tmpdirname)
with init_empty_weights():
# let's suppose that we can get the right config
model_8bit_from_saved = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_8bit_from_saved.tie_weights()
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
device_map = {
"transformer.word_embeddings": "cpu",
"transformer.word_embeddings_layernorm": 0,
"lm_head": "cpu",
"transformer.h.0": "cpu",
"transformer.h.1": "cpu",
"transformer.h.2": "cpu",
"transformer.h.3": "disk",
"transformer.h.4": "disk",
"transformer.h.5": "disk",
"transformer.h.6": 0,
"transformer.h.7": 0,
"transformer.h.8": 0,
"transformer.h.9": 1,
"transformer.h.10": 0,
"transformer.h.11": 1,
"transformer.h.12": 0,
"transformer.h.13": 0,
"transformer.h.14": 1,
"transformer.h.15": 0,
"transformer.h.16": 0,
"transformer.h.17": 1,
"transformer.h.18": 1,
"transformer.h.19": 0,
"transformer.h.20": 1,
"transformer.h.21": 1,
"transformer.h.22": 0,
"transformer.h.23": 0,
"transformer.ln_f": 1,
}
model_8bit_from_saved = load_and_quantize_model(
model_8bit_from_saved,
bnb_quantization_config,
weights_location=tmpdirname + "/pytorch_model.bin",
device_map=device_map,
no_split_module_classes=["BloomBlock"],
offload_folder=tmpdirname + "/tmp",
offload_state_dict=True,
)
self.assertTrue(model_8bit_from_saved.transformer.h[4].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.assertTrue(model_8bit_from_saved.transformer.h[5].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.check_inference_correctness(model_8bit_from_saved)
def test_int8_serialization_shard(self):
r"""
Test whether it is possible to serialize a model in 8-bit.
"""
from bitsandbytes.nn import Int8Params
from transformers import AutoConfig, AutoModelForCausalLM
with tempfile.TemporaryDirectory() as tmpdirname:
# saving state dict for now but will save config and other in the future
self.accelerate.save_model(self.model_8bit, tmpdirname, max_shard_size="1GB")
with init_empty_weights():
# let's suppose that we can get the right config
model_8bit_from_saved = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_8bit_from_saved.tie_weights()
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
model_8bit_from_saved = load_and_quantize_model(
model_8bit_from_saved,
bnb_quantization_config,
weights_location=tmpdirname,
device_map="auto",
no_split_module_classes=["BloomBlock"],
)
self.assertTrue(model_8bit_from_saved.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
self.assertTrue(hasattr(model_8bit_from_saved.transformer.h[0].mlp.dense_4h_to_h.weight, "SCB"))
self.assertTrue(hasattr(model_8bit_from_saved.transformer.h[0].mlp.dense_4h_to_h.weight, "CB"))
self.check_inference_correctness(model_8bit_from_saved)
@slow
@require_cuda
@require_bnb
@require_huggingface_suite
class MixedInt8LoaddedModelTest(unittest.TestCase):
# We keep the constants inside the init function and model loading inside setUp function
# We need to test on relatively large models (aka >1b parameters otherwise the quantiztion may not work as expected)
# Therefore here we use only bloom-1b3 to test our module
model_name = "marcsun13/bloom-1b7_with_lm_head"
# Constant values
# This was obtained on a Quadro RTX 8000 so the number might slightly change
EXPECTED_RELATIVE_DIFFERENCE = 1.540025
input_text = "Hello my name is"
EXPECTED_OUTPUT = "Hello my name is John.\nI am a friend of the family.\n"
MAX_NEW_TOKENS = 10
def setUp(self):
"""
Setup quantized model from loaded model
"""
from transformers import AutoModelForCausalLM, AutoTokenizer
# Models and tokenizer
self.model_fp16 = AutoModelForCausalLM.from_pretrained(
self.model_name, torch_dtype=torch.float16, device_map="auto"
)
self.bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True)
self.model_8bit = AutoModelForCausalLM.from_pretrained(self.model_name, torch_dtype=torch.float16)
self.model_8bit = load_and_quantize_model(self.model_8bit, self.bnb_quantization_config)
self.tokenizer = AutoTokenizer.from_pretrained("bigscience/bloom-1b7")
def tearDown(self):
r"""
TearDown function needs to be called at the end of each test to free the GPU memory and cache, also to
avoid unexpected behaviors. Please see: https://discuss.pytorch.org/t/how-can-we-release-gpu-memory-cache/14530/27
"""
del self.model_fp16
del self.model_8bit
gc.collect()
torch.cuda.empty_cache()
def test_memory_footprint(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
from bitsandbytes.nn import Int8Params
mem_fp16 = self.model_fp16.get_memory_footprint()
mem_8bit = self.model_8bit.get_memory_footprint()
self.assertAlmostEqual(mem_fp16 / mem_8bit, self.EXPECTED_RELATIVE_DIFFERENCE)
self.assertTrue(self.model_8bit.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Int8Params)
def test_linear_are_8bit(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
self.model_fp16.get_memory_footprint()
self.model_8bit.get_memory_footprint()
for name, module in self.model_8bit.named_modules():
if isinstance(module, torch.nn.Linear):
modules_not_converted = (
self.bnb_quantization_config.keep_in_fp32_modules + self.bnb_quantization_config.skip_modules
)
if name not in modules_not_converted:
self.assertTrue(module.weight.dtype == torch.int8)
def test_generate_quality(self):
r"""
Test the generation quality of the quantized model and see that we are matching the expected output.
Given that we are operating on small numbers + the testing model is relatively small, we might not get
the same output across GPUs. So we'll generate few tokens (5-10) and check their output.
"""
encoded_input = self.tokenizer(self.input_text, return_tensors="pt")
output_sequences = self.model_8bit.generate(
input_ids=encoded_input["input_ids"].to(self.model_8bit.device), max_new_tokens=10
)
self.assertEqual(self.tokenizer.decode(output_sequences[0], skip_special_tokens=True), self.EXPECTED_OUTPUT)
def test_fp32_8bit_conversion(self):
r"""
Test whether it is possible to mix both `8bit` and `fp32` weights when using `keep_in_fp32_modules` correctly.
"""
from transformers import AutoModelForCausalLM
bnb_quantization_config = BnbQuantizationConfig(load_in_8bit=True, keep_in_fp32_modules=["lm_head"])
model = AutoModelForCausalLM.from_pretrained(self.model_name, torch_dtype=torch.float16)
model = load_and_quantize_model(model, bnb_quantization_config)
self.assertTrue(model.lm_head.weight.dtype == torch.float32)
@slow
@require_cuda
@require_bnb
@require_huggingface_suite
class Bnb4BitEmptyModelTest(unittest.TestCase):
# We keep the constants inside the init function and model loading inside setUp function
# We need to test on relatively large models (aka >1b parameters otherwise the quantiztion may not work as expected)
# Therefore here we use only bloom-1b3 to test our module
model_name = "marcsun13/bloom-1b7_with_lm_head"
# Constant values
# This was obtained on a RTX Titan so the number might slightly change
EXPECTED_RELATIVE_DIFFERENCE = 2.109659552692574
input_text = "Hello my name is"
EXPECTED_OUTPUTS = set()
EXPECTED_OUTPUTS.add("Hello my name is John and I am a professional photographer. I")
EXPECTED_OUTPUTS.add("Hello my name is John.\nI am a friend of your father.\n")
MAX_NEW_TOKENS = 10
def setUp(self):
from huggingface_hub import hf_hub_download
from transformers import AutoConfig, AutoModelForCausalLM, AutoTokenizer
super().setUp()
# Models and tokenizer
self.model_fp16 = AutoModelForCausalLM.from_pretrained(
self.model_name, torch_dtype=torch.float16, device_map="auto"
)
# create model on meta device
with init_empty_weights():
self.model_4bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
self.model_4bit.tie_weights()
self.weights_location = hf_hub_download(self.model_name, "pytorch_model.bin")
self.bnb_quantization_config = BnbQuantizationConfig(load_in_4bit=True)
self.model_4bit = load_and_quantize_model(
self.model_4bit,
self.bnb_quantization_config,
weights_location=self.weights_location,
device_map={"": 0},
no_split_module_classes=["BloomBlock"],
)
self.tokenizer = AutoTokenizer.from_pretrained("bigscience/bloom-1b7")
def tearDown(self):
"""
TearDown function needs to be called at the end of each test to free the GPU memory and cache, also to
avoid unexpected behaviors. Please see: https://discuss.pytorch.org/t/how-can-we-release-gpu-memory-cache/14530/27
"""
super().tearDown()
del self.model_fp16
del self.model_4bit
gc.collect()
torch.cuda.empty_cache()
def test_memory_footprint(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
from bitsandbytes.nn import Params4bit
mem_fp16 = self.model_fp16.get_memory_footprint()
mem_4bit = self.model_4bit.get_memory_footprint()
self.assertAlmostEqual(mem_fp16 / mem_4bit, self.EXPECTED_RELATIVE_DIFFERENCE)
self.assertTrue(self.model_4bit.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Params4bit)
def check_inference_correctness(self, model):
r"""
Test the generation quality of the quantized model and see that we are matching the expected output.
Given that we are operating on small numbers + the testing model is relatively small, we might not get
the same output across GPUs. So we'll generate few tokens (5-10) and check their output.
"""
# Check that inference pass works on the model
encoded_input = self.tokenizer(self.input_text, return_tensors="pt")
# Check the exactness of the results
output_sequences = model.generate(input_ids=encoded_input["input_ids"].to(0), max_new_tokens=10)
self.assertIn(self.tokenizer.decode(output_sequences[0], skip_special_tokens=True), self.EXPECTED_OUTPUTS)
def test_generate_quality(self):
self.check_inference_correctness(self.model_4bit)
def test_linear_are_4bit(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
self.model_fp16.get_memory_footprint()
self.model_4bit.get_memory_footprint()
for name, module in self.model_4bit.named_modules():
if isinstance(module, torch.nn.Linear):
if (
name
not in self.bnb_quantization_config.keep_in_fp32_modules
+ self.bnb_quantization_config.skip_modules
):
# 4-bit parameters are packed in uint8 variables
self.assertTrue(module.weight.dtype == torch.uint8)
def test_fp32_4bit_conversion(self):
r"""
Test whether it is possible to mix both `4bit` and `fp32` weights when using `keep_in_fp32_modules` correctly.
"""
from transformers import AutoConfig, AutoModelForCausalLM
bnb_quantization_config = BnbQuantizationConfig(load_in_4bit=True, keep_in_fp32_modules=["lm_head"])
with init_empty_weights():
model = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model.tie_weights()
model = load_and_quantize_model(
model,
bnb_quantization_config,
weights_location=self.weights_location,
device_map="auto",
no_split_module_classes=["BloomBlock"],
)
self.assertTrue(model.lm_head.weight.dtype == torch.float32)
@require_multi_gpu
def test_cpu_gpu_loading_random_device_map(self):
from transformers import AutoConfig, AutoModelForCausalLM
r"""
A test to check is dispatching a model on cpu & gpu works correctly using a random `device_map`.
"""
device_map = {
"transformer.word_embeddings": "cpu",
"transformer.word_embeddings_layernorm": 0,
"lm_head": "cpu",
"transformer.h.0": 0,
"transformer.h.1": 0,
"transformer.h.2": 0,
"transformer.h.3": 0,
"transformer.h.4": 0,
"transformer.h.5": 0,
"transformer.h.6": 0,
"transformer.h.7": 0,
"transformer.h.8": 0,
"transformer.h.9": 1,
"transformer.h.10": 0,
"transformer.h.11": 1,
"transformer.h.12": 0,
"transformer.h.13": 0,
"transformer.h.14": 1,
"transformer.h.15": 0,
"transformer.h.16": 0,
"transformer.h.17": 1,
"transformer.h.18": 1,
"transformer.h.19": 0,
"transformer.h.20": 1,
"transformer.h.21": 1,
"transformer.h.22": 0,
"transformer.h.23": 0,
"transformer.ln_f": 1,
}
bnb_quantization_config = BnbQuantizationConfig(load_in_4bit=True)
with init_empty_weights():
model_4bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_4bit.tie_weights()
model_4bit = load_and_quantize_model(
model_4bit,
bnb_quantization_config,
weights_location=self.weights_location,
device_map=device_map,
no_split_module_classes=["BloomBlock"],
)
self.check_inference_correctness(model_4bit)
@require_multi_gpu
def test_cpu_gpu_loading_custom_device_map(self):
from transformers import AutoConfig, AutoModelForCausalLM
r"""
A test to check is dispatching a model on cpu & gpu works correctly using a random `device_map`.
"""
device_map = {
"transformer.word_embeddings": "cpu",
"transformer.word_embeddings_layernorm": "cpu",
"lm_head": "cpu",
"transformer.h": 0,
"transformer.ln_f": 1,
}
bnb_quantization_config = BnbQuantizationConfig(load_in_4bit=True)
with init_empty_weights():
model_4bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_4bit.tie_weights()
model_4bit = load_and_quantize_model(
model_4bit,
bnb_quantization_config,
weights_location=self.weights_location,
device_map=device_map,
no_split_module_classes=["BloomBlock"],
)
self.check_inference_correctness(model_4bit)
@require_multi_gpu
def test_cpu_gpu_disk_loading_custom_device_map_kwargs(self):
from transformers import AutoConfig, AutoModelForCausalLM
r"""
A test to check is dispatching a model on cpu & gpu works correctly using a custom `device_map`.
This time we also add `disk` on the device_map - using the kwargs directly instead of the quantization config
"""
device_map = {
"transformer.word_embeddings": 0,
"transformer.word_embeddings_layernorm": "disk",
"lm_head": 0,
"transformer.h": 1,
"transformer.ln_f": "cpu",
}
bnb_quantization_config = BnbQuantizationConfig(load_in_4bit=True)
with init_empty_weights():
model_4bit = AutoModelForCausalLM.from_config(AutoConfig.from_pretrained(self.model_name))
model_4bit.tie_weights()
with tempfile.TemporaryDirectory() as tmpdirname:
model_4bit = load_and_quantize_model(
model_4bit,
bnb_quantization_config,
weights_location=self.weights_location,
device_map=device_map,
no_split_module_classes=["BloomBlock"],
offload_folder=tmpdirname,
offload_state_dict=True,
)
self.check_inference_correctness(model_4bit)
@slow
@require_cuda
@require_bnb
@require_huggingface_suite
class Bnb4BitTestLoadedModel(unittest.TestCase):
# We keep the constants inside the init function and model loading inside setUp function
# We need to test on relatively large models (aka >1b parameters otherwise the quantiztion may not work as expected)
# Therefore here we use only bloom-1b3 to test our module
model_name = "marcsun13/bloom-1b7_with_lm_head"
# Constant values
# This was obtained on a RTX Titan so the number might slightly change
EXPECTED_RELATIVE_DIFFERENCE = 2.109659552692574
input_text = "Hello my name is"
EXPECTED_OUTPUTS = set()
EXPECTED_OUTPUTS.add("Hello my name is John and I am a professional photographer. I")
EXPECTED_OUTPUTS.add("Hello my name is John.\nI am a friend of your father.\n")
MAX_NEW_TOKENS = 10
def setUp(self):
"""
Setup quantized model from loaded model
"""
from transformers import AutoModelForCausalLM, AutoTokenizer
super().setUp()
# Models and tokenizer
self.model_fp16 = AutoModelForCausalLM.from_pretrained(
self.model_name, torch_dtype=torch.float16, device_map="auto"
)
self.bnb_quantization_config = BnbQuantizationConfig(load_in_4bit=True)
self.model_4bit = AutoModelForCausalLM.from_pretrained(self.model_name, torch_dtype=torch.float16)
self.model_4bit = load_and_quantize_model(self.model_4bit, self.bnb_quantization_config)
self.tokenizer = AutoTokenizer.from_pretrained("bigscience/bloom-1b7")
def tearDown(self):
"""
TearDown function needs to be called at the end of each test to free the GPU memory and cache, also to
avoid unexpected behaviors. Please see: https://discuss.pytorch.org/t/how-can-we-release-gpu-memory-cache/14530/27
"""
super().tearDown()
del self.model_fp16
del self.model_4bit
gc.collect()
torch.cuda.empty_cache()
def test_memory_footprint(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
from bitsandbytes.nn import Params4bit
mem_fp16 = self.model_fp16.get_memory_footprint()
mem_4bit = self.model_4bit.get_memory_footprint()
self.assertAlmostEqual(mem_fp16 / mem_4bit, self.EXPECTED_RELATIVE_DIFFERENCE)
self.assertTrue(self.model_4bit.transformer.h[0].mlp.dense_4h_to_h.weight.__class__ == Params4bit)
def test_linear_are_4bit(self):
r"""
A simple test to check if the model conversion has been done correctly by checking on the
memory footprint of the converted model and the class type of the linear layers of the converted models
"""
self.model_fp16.get_memory_footprint()
self.model_4bit.get_memory_footprint()
for name, module in self.model_4bit.named_modules():
if isinstance(module, torch.nn.Linear):
if (
name
not in self.bnb_quantization_config.keep_in_fp32_modules
+ self.bnb_quantization_config.skip_modules
):
# 4-bit parameters are packed in uint8 variables
self.assertTrue(module.weight.dtype == torch.uint8)
def test_generate_quality(self):
r"""
Test the generation quality of the quantized model and see that we are matching the expected output.
Given that we are operating on small numbers + the testing model is relatively small, we might not get
the same output across GPUs. So we'll generate few tokens (5-10) and check their output.
"""
encoded_input = self.tokenizer(self.input_text, return_tensors="pt")
output_sequences = self.model_4bit.generate(
input_ids=encoded_input["input_ids"].to(self.model_4bit.device), max_new_tokens=10
)
self.assertIn(self.tokenizer.decode(output_sequences[0], skip_special_tokens=True), self.EXPECTED_OUTPUTS)
def test_fp32_4bit_conversion(self):
r"""
Test whether it is possible to mix both `4bit` and `fp32` weights when using `keep_in_fp32_modules` correctly.
"""
from transformers import AutoModelForCausalLM
bnb_quantization_config = BnbQuantizationConfig(load_in_4bit=True, keep_in_fp32_modules=["lm_head"])
model = AutoModelForCausalLM.from_pretrained(self.model_name, torch_dtype=torch.float16)
model = load_and_quantize_model(model, bnb_quantization_config)
self.assertTrue(model.lm_head.weight.dtype == torch.float32)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_memory_utils.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import unittest
import torch
from torch import nn
from accelerate.test_utils import require_cuda
from accelerate.utils.memory import find_executable_batch_size, release_memory
def raise_fake_out_of_memory():
raise RuntimeError("CUDA out of memory.")
class ModelForTest(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(3, 4)
self.batchnorm = nn.BatchNorm1d(4)
self.linear2 = nn.Linear(4, 5)
def forward(self, x):
return self.linear2(self.batchnorm(self.linear1(x)))
class MemoryTest(unittest.TestCase):
def test_memory_implicit(self):
batch_sizes = []
@find_executable_batch_size(starting_batch_size=128)
def mock_training_loop_function(batch_size):
nonlocal batch_sizes
batch_sizes.append(batch_size)
if batch_size != 8:
raise_fake_out_of_memory()
mock_training_loop_function()
self.assertListEqual(batch_sizes, [128, 64, 32, 16, 8])
def test_memory_explicit(self):
batch_sizes = []
@find_executable_batch_size(starting_batch_size=128)
def mock_training_loop_function(batch_size, arg1):
nonlocal batch_sizes
batch_sizes.append(batch_size)
if batch_size != 8:
raise_fake_out_of_memory()
return batch_size, arg1
bs, arg1 = mock_training_loop_function("hello")
self.assertListEqual(batch_sizes, [128, 64, 32, 16, 8])
self.assertListEqual([bs, arg1], [8, "hello"])
def test_start_zero(self):
@find_executable_batch_size(starting_batch_size=0)
def mock_training_loop_function(batch_size):
pass
with self.assertRaises(RuntimeError) as cm:
mock_training_loop_function()
self.assertIn("No executable batch size found, reached zero.", cm.exception.args[0])
def test_approach_zero(self):
@find_executable_batch_size(starting_batch_size=16)
def mock_training_loop_function(batch_size):
if batch_size > 0:
raise_fake_out_of_memory()
pass
with self.assertRaises(RuntimeError) as cm:
mock_training_loop_function()
self.assertIn("No executable batch size found, reached zero.", cm.exception.args[0])
def test_verbose_guard(self):
@find_executable_batch_size(starting_batch_size=128)
def mock_training_loop_function(batch_size, arg1, arg2):
if batch_size != 8:
raise raise_fake_out_of_memory()
with self.assertRaises(TypeError) as cm:
mock_training_loop_function(128, "hello", "world")
self.assertIn("Batch size was passed into `f`", cm.exception.args[0])
self.assertIn("`f(arg1='hello', arg2='world')", cm.exception.args[0])
def test_any_other_error(self):
@find_executable_batch_size(starting_batch_size=16)
def mock_training_loop_function(batch_size):
raise ValueError("Oops, we had an error!")
with self.assertRaises(ValueError) as cm:
mock_training_loop_function()
self.assertIn("Oops, we had an error!", cm.exception.args[0])
@require_cuda
def test_release_memory(self):
starting_memory = torch.cuda.memory_allocated()
model = ModelForTest()
model.cuda()
self.assertGreater(torch.cuda.memory_allocated(), starting_memory)
model = release_memory(model)
self.assertEqual(torch.cuda.memory_allocated(), starting_memory)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/xla_spawn.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
A simple launcher script for TPU training
Inspired by https://github.com/pytorch/pytorch/blob/master/torch/distributed/launch.py
::
>>> python xla_spawn.py --num_cores=NUM_CORES_YOU_HAVE
YOUR_TRAINING_SCRIPT.py (--arg1 --arg2 --arg3 and all other
arguments of your training script)
"""
import importlib
import sys
from argparse import REMAINDER, ArgumentParser
from pathlib import Path
import torch_xla.distributed.xla_multiprocessing as xmp
def parse_args():
"""
Helper function parsing the command line options
@retval ArgumentParser
"""
parser = ArgumentParser(
description=(
"PyTorch TPU distributed training launch "
"helper utility that will spawn up "
"multiple distributed processes"
)
)
# Optional arguments for the launch helper
parser.add_argument("--num_cores", type=int, default=1, help="Number of TPU cores to use (1 or 8).")
# positional
parser.add_argument(
"training_script",
type=str,
help=(
"The full path to the single TPU training "
"program/script to be launched in parallel, "
"followed by all the arguments for the "
"training script"
),
)
# rest from the training program
parser.add_argument("training_script_args", nargs=REMAINDER)
return parser.parse_args()
def main():
args = parse_args()
# Import training_script as a module.
script_fpath = Path(args.training_script)
sys.path.append(str(script_fpath.parent.resolve()))
mod_name = script_fpath.stem
mod = importlib.import_module(mod_name)
# Patch sys.argv
sys.argv = [args.training_script] + args.training_script_args + ["--tpu_num_cores", str(args.num_cores)]
xmp.spawn(mod._mp_fn, args=(), nprocs=args.num_cores)
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_tpu.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import os
import sys
import unittest
import accelerate
from accelerate.test_utils import execute_subprocess_async, require_tpu
class MultiTPUTester(unittest.TestCase):
def setUp(self):
mod_file = inspect.getfile(accelerate.test_utils)
self.test_file_path = os.path.sep.join(mod_file.split(os.path.sep)[:-1] + ["scripts", "test_script.py"])
self.test_dir = os.path.sep.join(inspect.getfile(self.__class__).split(os.path.sep)[:-1])
@require_tpu
def test_tpu(self):
distributed_args = f"""
{self.test_dir}/xla_spawn.py
--num_cores 8
{self.test_file_path}
""".split()
cmd = [sys.executable] + distributed_args
execute_subprocess_async(cmd, env=os.environ.copy())
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_data_loader.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import random
import unittest
from torch.utils.data import BatchSampler, DataLoader, IterableDataset
from accelerate import Accelerator
from accelerate.data_loader import (
BatchSamplerShard,
DataLoaderDispatcher,
DataLoaderShard,
IterableDatasetShard,
SkipBatchSampler,
SkipDataLoader,
skip_first_batches,
)
class RandomIterableDataset(IterableDataset):
# For testing, an iterable dataset of random length
def __init__(self, p_stop=0.01, max_length=1000):
self.p_stop = p_stop
self.max_length = max_length
def __iter__(self):
count = 0
stop = False
while not stop and count < self.max_length:
yield count
count += 1
stop = random.random() < self.p_stop
class DataLoaderTester(unittest.TestCase):
def check_batch_sampler_shards(self, batch_sampler, expected, split_batches=False, even_batches=True):
batch_sampler_shards = [
BatchSamplerShard(batch_sampler, 2, i, split_batches=split_batches, even_batches=even_batches)
for i in range(2)
]
batch_sampler_lists = [list(batch_sampler_shard) for batch_sampler_shard in batch_sampler_shards]
if not split_batches:
self.assertListEqual([len(shard) for shard in batch_sampler_shards], [len(e) for e in expected])
self.assertListEqual(batch_sampler_lists, expected)
def test_batch_sampler_shards_with_no_splits(self):
# Check the shards when the dataset is a round multiple of total batch size.
batch_sampler = BatchSampler(range(24), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19, 20]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17], [21, 22, 23]],
]
self.check_batch_sampler_shards(batch_sampler, expected)
batch_sampler = BatchSampler(range(24), batch_size=3, drop_last=True)
# Expected shouldn't change
self.check_batch_sampler_shards(batch_sampler, expected)
# Check the shards when the dataset is a round multiple of batch size but not total batch size.
batch_sampler = BatchSampler(range(21), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19, 20]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17], [0, 1, 2]],
]
self.check_batch_sampler_shards(batch_sampler, expected)
batch_sampler = BatchSampler(range(21), batch_size=3, drop_last=True)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected)
# Check the shards when the dataset is not a round multiple of batch size but has a multiple of
# num_processes batch.
batch_sampler = BatchSampler(range(22), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19, 20]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17], [21, 0, 1]],
]
self.check_batch_sampler_shards(batch_sampler, expected)
batch_sampler = BatchSampler(range(22), batch_size=3, drop_last=True)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected)
# Check the shards when the dataset is not a round multiple of batch size but and has not a multiple of
# num_processes batch.
batch_sampler = BatchSampler(range(20), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19, 0]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17], [1, 2, 3]],
]
self.check_batch_sampler_shards(batch_sampler, expected)
batch_sampler = BatchSampler(range(20), batch_size=3, drop_last=True)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected)
# Check the shards when the dataset is very small.
batch_sampler = BatchSampler(range(2), batch_size=3, drop_last=False)
expected = [[[0, 1, 0]], [[1, 0, 1]]]
self.check_batch_sampler_shards(batch_sampler, expected)
batch_sampler = BatchSampler(range(2), batch_size=3, drop_last=True)
expected = [[], []]
self.check_batch_sampler_shards(batch_sampler, expected)
def test_batch_sampler_shards_with_splits(self):
# Check the shards when the dataset is a round multiple of batch size.
batch_sampler = BatchSampler(range(24), batch_size=4, drop_last=False)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17], [20, 21]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19], [22, 23]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
batch_sampler = BatchSampler(range(24), batch_size=4, drop_last=True)
# Expected shouldn't change
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
# Check the shards when the dataset is not a round multiple of batch size.
batch_sampler = BatchSampler(range(22), batch_size=4, drop_last=False)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17], [20, 21]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19], [0, 1]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
batch_sampler = BatchSampler(range(22), batch_size=4, drop_last=True)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
# Check the shards when the dataset is not a round multiple of batch size or num_processes.
batch_sampler = BatchSampler(range(21), batch_size=4, drop_last=False)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17], [20, 0]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19], [1, 2]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
batch_sampler = BatchSampler(range(21), batch_size=4, drop_last=True)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
# Check the shards when the dataset is very small.
batch_sampler = BatchSampler(range(2), batch_size=4, drop_last=False)
expected = [[[0, 1]], [[0, 1]]]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
batch_sampler = BatchSampler(range(2), batch_size=4, drop_last=True)
expected = [[], []]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True)
def test_batch_sampler_shards_with_no_splits_no_even(self):
# Check the shards when the dataset is a round multiple of total batch size.
batch_sampler = BatchSampler(range(24), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19, 20]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17], [21, 22, 23]],
]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
batch_sampler = BatchSampler(range(24), batch_size=3, drop_last=True)
# Expected shouldn't change
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
# Check the shards when the dataset is a round multiple of batch size but not total batch size.
batch_sampler = BatchSampler(range(21), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19, 20]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
batch_sampler = BatchSampler(range(21), batch_size=3, drop_last=True)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
# Check the shards when the dataset is not a round multiple of batch size but has a multiple of
# num_processes batch.
batch_sampler = BatchSampler(range(22), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19, 20]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17], [21]],
]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
batch_sampler = BatchSampler(range(22), batch_size=3, drop_last=True)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
# Check the shards when the dataset is not a round multiple of batch size but and has not a multiple of
# num_processes batch.
batch_sampler = BatchSampler(range(20), batch_size=3, drop_last=False)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14], [18, 19]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
batch_sampler = BatchSampler(range(20), batch_size=3, drop_last=True)
expected = [
[[0, 1, 2], [6, 7, 8], [12, 13, 14]],
[[3, 4, 5], [9, 10, 11], [15, 16, 17]],
]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
# Check the shards when the dataset is very small.
batch_sampler = BatchSampler(range(2), batch_size=3, drop_last=False)
expected = [[[0, 1]], []]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
batch_sampler = BatchSampler(range(2), batch_size=3, drop_last=True)
expected = [[], []]
self.check_batch_sampler_shards(batch_sampler, expected, even_batches=False)
def test_batch_sampler_shards_with_splits_no_even(self):
# Check the shards when the dataset is a round multiple of batch size.
batch_sampler = BatchSampler(range(24), batch_size=4, drop_last=False)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17], [20, 21]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19], [22, 23]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
batch_sampler = BatchSampler(range(24), batch_size=4, drop_last=True)
# Expected shouldn't change
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
# Check the shards when the dataset is not a round multiple of batch size.
batch_sampler = BatchSampler(range(22), batch_size=4, drop_last=False)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17], [20, 21]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
batch_sampler = BatchSampler(range(22), batch_size=4, drop_last=True)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
# Check the shards when the dataset is not a round multiple of batch size or num_processes.
batch_sampler = BatchSampler(range(21), batch_size=4, drop_last=False)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17], [20]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
batch_sampler = BatchSampler(range(21), batch_size=4, drop_last=True)
expected = [
[[0, 1], [4, 5], [8, 9], [12, 13], [16, 17]],
[[2, 3], [6, 7], [10, 11], [14, 15], [18, 19]],
]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
# Check the shards when the dataset is very small.
batch_sampler = BatchSampler(range(2), batch_size=4, drop_last=False)
expected = [[[0, 1]], []]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
batch_sampler = BatchSampler(range(2), batch_size=4, drop_last=True)
expected = [[], []]
self.check_batch_sampler_shards(batch_sampler, expected, split_batches=True, even_batches=False)
def test_batch_sampler_with_varying_batch_size(self):
batch_sampler = [[0, 1, 2], [3, 4], [5, 6, 7, 8], [9, 10, 11], [12, 13]]
batch_sampler_shards = [BatchSamplerShard(batch_sampler, 2, i, even_batches=False) for i in range(2)]
self.assertEqual(len(batch_sampler_shards[0]), 3)
self.assertEqual(len(batch_sampler_shards[1]), 2)
self.assertListEqual(list(batch_sampler_shards[0]), [[0, 1, 2], [5, 6, 7, 8], [12, 13]])
self.assertListEqual(list(batch_sampler_shards[1]), [[3, 4], [9, 10, 11]])
def check_iterable_dataset_shards(
self, dataset, seed, batch_size, drop_last=False, num_processes=2, split_batches=False
):
random.seed(seed)
reference = list(dataset)
iterable_dataset_shards = [
IterableDatasetShard(
dataset,
batch_size=batch_size,
drop_last=drop_last,
num_processes=num_processes,
process_index=i,
split_batches=split_batches,
)
for i in range(num_processes)
]
iterable_dataset_lists = []
for iterable_dataset_shard in iterable_dataset_shards:
# Since our random iterable dataset will be... random... we need to use a seed to get reproducible results.
random.seed(seed)
iterable_dataset_lists.append(list(iterable_dataset_shard))
shard_batch_size = batch_size // num_processes if split_batches else batch_size
# All iterable dataset shard should have the same length, a round multiple of shard_batch_size
first_list = iterable_dataset_lists[0]
for l in iterable_dataset_lists[1:]:
self.assertEqual(len(l), len(first_list))
self.assertTrue(len(l) % shard_batch_size == 0)
observed = []
for idx in range(0, len(first_list), shard_batch_size):
for l in iterable_dataset_lists:
observed += l[idx : idx + shard_batch_size]
if not drop_last:
while len(reference) < len(observed):
reference += reference
self.assertListEqual(observed, reference[: len(observed)])
def test_iterable_dataset_shard(self):
seed = 42
dataset = RandomIterableDataset()
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=False, split_batches=False)
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=True, split_batches=False)
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=False, split_batches=True)
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=True, split_batches=True)
# Edge case with a very small dataset
dataset = RandomIterableDataset(max_length=2)
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=False, split_batches=False)
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=True, split_batches=False)
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=False, split_batches=True)
self.check_iterable_dataset_shards(dataset, seed, batch_size=4, drop_last=True, split_batches=True)
def test_skip_batch_sampler(self):
batch_sampler = BatchSampler(range(16), batch_size=4, drop_last=False)
new_batch_sampler = SkipBatchSampler(batch_sampler, 2)
self.assertListEqual(list(new_batch_sampler), [[8, 9, 10, 11], [12, 13, 14, 15]])
def test_skip_data_loader(self):
dataloader = SkipDataLoader(list(range(16)), batch_size=4, skip_batches=2)
self.assertListEqual([t.tolist() for t in dataloader], [[8, 9, 10, 11], [12, 13, 14, 15]])
def test_skip_first_batches(self):
dataloader = DataLoader(list(range(16)), batch_size=4)
new_dataloader = skip_first_batches(dataloader, num_batches=2)
self.assertListEqual([t.tolist() for t in new_dataloader], [[8, 9, 10, 11], [12, 13, 14, 15]])
def test_end_of_dataloader(self):
dataloader = DataLoaderShard(list(range(16)), batch_size=4)
for idx, _ in enumerate(dataloader):
self.assertEqual(dataloader.end_of_dataloader, idx == 3)
# Test it also works on the second iteration
for idx, _ in enumerate(dataloader):
self.assertEqual(dataloader.end_of_dataloader, idx == 3)
def test_end_of_dataloader_dispatcher(self):
Accelerator()
dataloader = DataLoaderDispatcher(range(16), batch_size=4)
for idx, _ in enumerate(dataloader):
self.assertEqual(dataloader.end_of_dataloader, idx == 3)
# Test it also works on the second iteration
for idx, _ in enumerate(dataloader):
self.assertEqual(dataloader.end_of_dataloader, idx == 3)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_utils.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
import pickle
import unittest
from collections import UserDict, namedtuple
import torch
from accelerate.test_utils.testing import require_cuda, require_torch_min_version
from accelerate.test_utils.training import RegressionModel
from accelerate.utils import (
convert_outputs_to_fp32,
extract_model_from_parallel,
find_device,
listify,
patch_environment,
recursively_apply,
send_to_device,
)
ExampleNamedTuple = namedtuple("ExampleNamedTuple", "a b c")
class UtilsTester(unittest.TestCase):
def test_send_to_device(self):
tensor = torch.randn(5, 2)
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
result1 = send_to_device(tensor, device)
self.assertTrue(torch.equal(result1.cpu(), tensor))
result2 = send_to_device((tensor, [tensor, tensor], 1), device)
self.assertIsInstance(result2, tuple)
self.assertTrue(torch.equal(result2[0].cpu(), tensor))
self.assertIsInstance(result2[1], list)
self.assertTrue(torch.equal(result2[1][0].cpu(), tensor))
self.assertTrue(torch.equal(result2[1][1].cpu(), tensor))
self.assertEqual(result2[2], 1)
result2 = send_to_device({"a": tensor, "b": [tensor, tensor], "c": 1}, device)
self.assertIsInstance(result2, dict)
self.assertTrue(torch.equal(result2["a"].cpu(), tensor))
self.assertIsInstance(result2["b"], list)
self.assertTrue(torch.equal(result2["b"][0].cpu(), tensor))
self.assertTrue(torch.equal(result2["b"][1].cpu(), tensor))
self.assertEqual(result2["c"], 1)
result3 = send_to_device(ExampleNamedTuple(a=tensor, b=[tensor, tensor], c=1), device)
self.assertIsInstance(result3, ExampleNamedTuple)
self.assertTrue(torch.equal(result3.a.cpu(), tensor))
self.assertIsInstance(result3.b, list)
self.assertTrue(torch.equal(result3.b[0].cpu(), tensor))
self.assertTrue(torch.equal(result3.b[1].cpu(), tensor))
self.assertEqual(result3.c, 1)
result4 = send_to_device(UserDict({"a": tensor, "b": [tensor, tensor], "c": 1}), device)
self.assertIsInstance(result4, UserDict)
self.assertTrue(torch.equal(result4["a"].cpu(), tensor))
self.assertIsInstance(result4["b"], list)
self.assertTrue(torch.equal(result4["b"][0].cpu(), tensor))
self.assertTrue(torch.equal(result4["b"][1].cpu(), tensor))
self.assertEqual(result4["c"], 1)
def test_honor_type(self):
with self.assertRaises(TypeError) as cm:
_ = recursively_apply(torch.tensor, (torch.tensor(1), 1), error_on_other_type=True)
self.assertEqual(
str(cm.exception),
"Unsupported types (<class 'int'>) passed to `tensor`. Only nested list/tuple/dicts of objects that are valid for `is_torch_tensor` should be passed.",
)
def test_listify(self):
tensor = torch.tensor([1, 2, 3, 4, 5])
self.assertEqual(listify(tensor), [1, 2, 3, 4, 5])
tensor = torch.tensor([[1, 2, 3, 4, 5], [6, 7, 8, 9, 10]])
self.assertEqual(listify(tensor), [[1, 2, 3, 4, 5], [6, 7, 8, 9, 10]])
tensor = torch.tensor([[[1, 2, 3, 4, 5], [6, 7, 8, 9, 10]], [[11, 12, 13, 14, 15], [16, 17, 18, 19, 20]]])
self.assertEqual(
listify(tensor), [[[1, 2, 3, 4, 5], [6, 7, 8, 9, 10]], [[11, 12, 13, 14, 15], [16, 17, 18, 19, 20]]]
)
def test_patch_environment(self):
with patch_environment(aa=1, BB=2):
self.assertEqual(os.environ.get("AA"), "1")
self.assertEqual(os.environ.get("BB"), "2")
self.assertNotIn("AA", os.environ)
self.assertNotIn("BB", os.environ)
def test_can_undo_convert_outputs(self):
model = RegressionModel()
model._original_forward = model.forward
model.forward = convert_outputs_to_fp32(model.forward)
model = extract_model_from_parallel(model, keep_fp32_wrapper=False)
_ = pickle.dumps(model)
@require_cuda
def test_can_undo_fp16_conversion(self):
model = RegressionModel()
model._original_forward = model.forward
model.forward = torch.cuda.amp.autocast(dtype=torch.float16)(model.forward)
model.forward = convert_outputs_to_fp32(model.forward)
model = extract_model_from_parallel(model, keep_fp32_wrapper=False)
_ = pickle.dumps(model)
@require_cuda
@require_torch_min_version(version="2.0")
def test_dynamo(self):
model = RegressionModel()
model._original_forward = model.forward
model.forward = torch.cuda.amp.autocast(dtype=torch.float16)(model.forward)
model.forward = convert_outputs_to_fp32(model.forward)
model.forward = torch.compile(model.forward, backend="inductor")
inputs = torch.randn(4, 10).cuda()
_ = model(inputs)
def test_extract_model(self):
model = RegressionModel()
# could also do a test with DistributedDataParallel, but difficult to run on CPU or single GPU
distributed_model = torch.nn.parallel.DataParallel(model)
model_unwrapped = extract_model_from_parallel(distributed_model)
self.assertEqual(model, model_unwrapped)
@require_torch_min_version(version="2.0")
def test_dynamo_extract_model(self):
model = RegressionModel()
compiled_model = torch.compile(model)
# could also do a test with DistributedDataParallel, but difficult to run on CPU or single GPU
distributed_model = torch.nn.parallel.DataParallel(model)
distributed_compiled_model = torch.compile(distributed_model)
compiled_model_unwrapped = extract_model_from_parallel(distributed_compiled_model)
self.assertEqual(compiled_model._orig_mod, compiled_model_unwrapped._orig_mod)
def test_find_device(self):
self.assertEqual(find_device([1, "a", torch.tensor([1, 2, 3])]), torch.device("cpu"))
self.assertEqual(find_device({"a": 1, "b": torch.tensor([1, 2, 3])}), torch.device("cpu"))
self.assertIsNone(find_device([1, "a"]))
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_cli.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import os
import unittest
from pathlib import Path
import torch
import accelerate
from accelerate.test_utils import execute_subprocess_async
from accelerate.test_utils.testing import run_command
class AccelerateLauncherTester(unittest.TestCase):
"""
Test case for verifying the `accelerate launch` CLI operates correctly.
If a `default_config.yaml` file is located in the cache it will temporarily move it
for the duration of the tests.
"""
mod_file = inspect.getfile(accelerate.test_utils)
test_file_path = os.path.sep.join(mod_file.split(os.path.sep)[:-1] + ["scripts", "test_cli.py"])
base_cmd = ["accelerate", "launch"]
config_folder = Path.home() / ".cache/huggingface/accelerate"
config_file = "default_config.yaml"
config_path = config_folder / config_file
changed_path = config_folder / "_default_config.yaml"
test_config_path = Path("tests/test_configs")
@classmethod
def setUpClass(cls):
if cls.config_path.is_file():
cls.config_path.rename(cls.changed_path)
@classmethod
def tearDownClass(cls):
if cls.changed_path.is_file():
cls.changed_path.rename(cls.config_path)
def test_no_config(self):
cmd = self.base_cmd
if torch.cuda.is_available() and (torch.cuda.device_count() > 1):
cmd += ["--multi_gpu"]
execute_subprocess_async(cmd + [self.test_file_path], env=os.environ.copy())
def test_config_compatibility(self):
for config in sorted(self.test_config_path.glob("**/*.yaml")):
with self.subTest(config_file=config):
execute_subprocess_async(
self.base_cmd + ["--config_file", str(config), self.test_file_path], env=os.environ.copy()
)
def test_accelerate_test(self):
execute_subprocess_async(["accelerate", "test"], env=os.environ.copy())
class TpuConfigTester(unittest.TestCase):
"""
Test case for verifying the `accelerate tpu-config` CLI passes the right `gcloud` command.
"""
tpu_name = "test-tpu"
tpu_zone = "us-central1-a"
command = "ls"
cmd = ["accelerate", "tpu-config"]
base_output = "cd /usr/share"
command_file = "tests/test_samples/test_command_file.sh"
gcloud = "Running gcloud compute tpus tpu-vm ssh"
def test_base(self):
output = run_command(
self.cmd
+ ["--command", self.command, "--tpu_zone", self.tpu_zone, "--tpu_name", self.tpu_name, "--debug"],
return_stdout=True,
)
self.assertIn(
f"{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; ls --worker all",
output,
)
def test_base_backward_compatibility(self):
output = run_command(
self.cmd
+ [
"--config_file",
"tests/test_configs/0_12_0.yaml",
"--command",
self.command,
"--tpu_zone",
self.tpu_zone,
"--tpu_name",
self.tpu_name,
"--debug",
],
return_stdout=True,
)
self.assertIn(
f"{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; ls --worker all",
output,
)
def test_with_config_file(self):
output = run_command(
self.cmd + ["--config_file", "tests/test_configs/latest.yaml", "--debug"], return_stdout=True
)
self.assertIn(
f'{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; echo "hello world"; echo "this is a second command" --worker all',
output,
)
def test_with_config_file_and_command(self):
output = run_command(
self.cmd + ["--config_file", "tests/test_configs/latest.yaml", "--command", self.command, "--debug"],
return_stdout=True,
)
self.assertIn(
f"{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; ls --worker all",
output,
)
def test_with_config_file_and_multiple_command(self):
output = run_command(
self.cmd
+ [
"--config_file",
"tests/test_configs/latest.yaml",
"--command",
self.command,
"--command",
'echo "Hello World"',
"--debug",
],
return_stdout=True,
)
self.assertIn(
f'{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; ls; echo "Hello World" --worker all',
output,
)
def test_with_config_file_and_command_file(self):
output = run_command(
self.cmd
+ ["--config_file", "tests/test_configs/latest.yaml", "--command_file", self.command_file, "--debug"],
return_stdout=True,
)
self.assertIn(
f'{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; echo "hello world"; echo "this is a second command" --worker all',
output,
)
def test_with_config_file_and_command_file_backward_compatibility(self):
output = run_command(
self.cmd
+ [
"--config_file",
"tests/test_configs/0_12_0.yaml",
"--command_file",
self.command_file,
"--tpu_zone",
self.tpu_zone,
"--tpu_name",
self.tpu_name,
"--debug",
],
return_stdout=True,
)
self.assertIn(
f'{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; echo "hello world"; echo "this is a second command" --worker all',
output,
)
def test_accelerate_install(self):
output = run_command(
self.cmd + ["--config_file", "tests/test_configs/latest.yaml", "--install_accelerate", "--debug"],
return_stdout=True,
)
self.assertIn(
f'{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; pip install accelerate -U; echo "hello world"; echo "this is a second command" --worker all',
output,
)
def test_accelerate_install_version(self):
output = run_command(
self.cmd
+ [
"--config_file",
"tests/test_configs/latest.yaml",
"--install_accelerate",
"--accelerate_version",
"12.0.0",
"--debug",
],
return_stdout=True,
)
self.assertIn(
f'{self.gcloud} test-tpu --zone us-central1-a --command {self.base_output}; pip install accelerate==12.0.0; echo "hello world"; echo "this is a second command" --worker all',
output,
)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_tracking.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import csv
import json
import logging
import os
import re
import subprocess
import tempfile
import unittest
import zipfile
from pathlib import Path
from typing import Optional
from unittest import mock
import torch
# We use TF to parse the logs
from accelerate import Accelerator
from accelerate.test_utils.testing import (
MockingTestCase,
TempDirTestCase,
require_comet_ml,
require_tensorboard,
require_wandb,
skip,
)
from accelerate.tracking import CometMLTracker, GeneralTracker
from accelerate.utils import ProjectConfiguration, is_comet_ml_available, is_tensorboard_available
if is_comet_ml_available():
from comet_ml import OfflineExperiment
if is_tensorboard_available():
import struct
import tensorboard.compat.proto.event_pb2 as event_pb2
logger = logging.getLogger(__name__)
@require_tensorboard
class TensorBoardTrackingTest(unittest.TestCase):
def test_init_trackers(self):
project_name = "test_project_with_config"
with tempfile.TemporaryDirectory() as dirpath:
accelerator = Accelerator(log_with="tensorboard", project_dir=dirpath)
config = {"num_iterations": 12, "learning_rate": 1e-2, "some_boolean": False, "some_string": "some_value"}
accelerator.init_trackers(project_name, config)
accelerator.end_training()
for child in Path(f"{dirpath}/{project_name}").glob("*/**"):
log = list(filter(lambda x: x.is_file(), child.iterdir()))[0]
self.assertNotEqual(str(log), "")
def test_log(self):
project_name = "test_project_with_log"
with tempfile.TemporaryDirectory() as dirpath:
accelerator = Accelerator(log_with="tensorboard", project_dir=dirpath)
accelerator.init_trackers(project_name)
values = {"total_loss": 0.1, "iteration": 1, "my_text": "some_value"}
accelerator.log(values, step=0)
accelerator.end_training()
# Logged values are stored in the outermost-tfevents file and can be read in as a TFRecord
# Names are randomly generated each time
log = list(filter(lambda x: x.is_file(), Path(f"{dirpath}/{project_name}").iterdir()))[0]
self.assertNotEqual(str(log), "")
def test_log_with_tensor(self):
project_name = "test_project_with_log"
with tempfile.TemporaryDirectory() as dirpath:
accelerator = Accelerator(log_with="tensorboard", project_dir=dirpath)
accelerator.init_trackers(project_name)
values = {"tensor": torch.tensor(1)}
accelerator.log(values, step=0)
accelerator.end_training()
# Logged values are stored in the outermost-tfevents file and can be read in as a TFRecord
# Names are randomly generated each time
log = list(filter(lambda x: x.is_file(), Path(f"{dirpath}/{project_name}").iterdir()))[0]
# Reading implementation based on https://github.com/pytorch/pytorch/issues/45327#issuecomment-703757685
with open(log, "rb") as f:
data = f.read()
found_tensor = False
while data:
header = struct.unpack("Q", data[:8])
event_str = data[12 : 12 + int(header[0])] # 8+4
data = data[12 + int(header[0]) + 4 :]
event = event_pb2.Event()
event.ParseFromString(event_str)
if event.HasField("summary"):
for value in event.summary.value:
if value.simple_value == 1.0 and value.tag == "tensor":
found_tensor = True
self.assertTrue(found_tensor, "Converted tensor was not found in the log file!")
def test_project_dir(self):
with self.assertRaisesRegex(ValueError, "Logging with `tensorboard` requires a `logging_dir`"):
_ = Accelerator(log_with="tensorboard")
with tempfile.TemporaryDirectory() as dirpath:
_ = Accelerator(log_with="tensorboard", project_dir=dirpath)
def test_project_dir_with_config(self):
config = ProjectConfiguration(total_limit=30)
with tempfile.TemporaryDirectory() as dirpath:
_ = Accelerator(log_with="tensorboard", project_dir=dirpath, project_config=config)
@require_wandb
@mock.patch.dict(os.environ, {"WANDB_MODE": "offline"})
class WandBTrackingTest(TempDirTestCase, MockingTestCase):
def setUp(self):
super().setUp()
# wandb let's us override where logs are stored to via the WANDB_DIR env var
self.add_mocks(mock.patch.dict(os.environ, {"WANDB_DIR": self.tmpdir}))
@staticmethod
def parse_log(log: str, section: str, record: bool = True):
"""
Parses wandb log for `section` and returns a dictionary of
all items in that section. Section names are based on the
output of `wandb sync --view --verbose` and items starting
with "Record" in that result
"""
# Big thanks to the W&B team for helping us parse their logs
pattern = rf"{section} ([\S\s]*?)\n\n"
if record:
pattern = rf"Record: {pattern}"
cleaned_record = re.findall(pattern, log)[0]
# A config
if section == "config" or section == "history":
cleaned_record = re.findall(r'"([a-zA-Z0-9_.,]+)', cleaned_record)
return {key: val for key, val in zip(cleaned_record[0::2], cleaned_record[1::2])}
# Everything else
else:
return dict(re.findall(r'(\w+): "([^\s]+)"', cleaned_record))
@skip
def test_wandb(self):
project_name = "test_project_with_config"
accelerator = Accelerator(log_with="wandb")
config = {"num_iterations": 12, "learning_rate": 1e-2, "some_boolean": False, "some_string": "some_value"}
kwargs = {"wandb": {"tags": ["my_tag"]}}
accelerator.init_trackers(project_name, config, kwargs)
values = {"total_loss": 0.1, "iteration": 1, "my_text": "some_value"}
accelerator.log(values, step=0)
accelerator.end_training()
# The latest offline log is stored at wandb/latest-run/*.wandb
for child in Path(f"{self.tmpdir}/wandb/latest-run").glob("*"):
if child.is_file() and child.suffix == ".wandb":
content = subprocess.check_output(
["wandb", "sync", "--view", "--verbose", str(child)], env=os.environ.copy()
).decode("utf8", "ignore")
break
# Check HPS through careful parsing and cleaning
logged_items = self.parse_log(content, "config")
self.assertEqual(logged_items["num_iterations"], "12")
self.assertEqual(logged_items["learning_rate"], "0.01")
self.assertEqual(logged_items["some_boolean"], "false")
self.assertEqual(logged_items["some_string"], "some_value")
self.assertEqual(logged_items["some_string"], "some_value")
# Run tags
logged_items = self.parse_log(content, "run", False)
self.assertEqual(logged_items["tags"], "my_tag")
# Actual logging
logged_items = self.parse_log(content, "history")
self.assertEqual(logged_items["total_loss"], "0.1")
self.assertEqual(logged_items["iteration"], "1")
self.assertEqual(logged_items["my_text"], "some_value")
self.assertEqual(logged_items["_step"], "0")
# Comet has a special `OfflineExperiment` we need to use for testing
def offline_init(self, run_name: str, tmpdir: str):
self.run_name = run_name
self.writer = OfflineExperiment(project_name=run_name, offline_directory=tmpdir)
logger.info(f"Initialized offline CometML project {self.run_name}")
logger.info("Make sure to log any initial configurations with `self.store_init_configuration` before training!")
@require_comet_ml
@mock.patch.object(CometMLTracker, "__init__", offline_init)
class CometMLTest(unittest.TestCase):
@staticmethod
def get_value_from_key(log_list, key: str, is_param: bool = False):
"Extracts `key` from Comet `log`"
for log in log_list:
j = json.loads(log)["payload"]
if is_param and "param" in j.keys():
if j["param"]["paramName"] == key:
return j["param"]["paramValue"]
if "log_other" in j.keys():
if j["log_other"]["key"] == key:
return j["log_other"]["val"]
if "metric" in j.keys():
if j["metric"]["metricName"] == key:
return j["metric"]["metricValue"]
def test_init_trackers(self):
with tempfile.TemporaryDirectory() as d:
tracker = CometMLTracker("test_project_with_config", d)
accelerator = Accelerator(log_with=tracker)
config = {"num_iterations": 12, "learning_rate": 1e-2, "some_boolean": False, "some_string": "some_value"}
accelerator.init_trackers(None, config)
accelerator.end_training()
log = os.listdir(d)[0] # Comet is nice, it's just a zip file here
# We parse the raw logs
p = os.path.join(d, log)
archive = zipfile.ZipFile(p, "r")
log = archive.open("messages.json").read().decode("utf-8")
list_of_json = log.split("\n")[:-1]
self.assertEqual(self.get_value_from_key(list_of_json, "num_iterations", True), 12)
self.assertEqual(self.get_value_from_key(list_of_json, "learning_rate", True), 0.01)
self.assertEqual(self.get_value_from_key(list_of_json, "some_boolean", True), False)
self.assertEqual(self.get_value_from_key(list_of_json, "some_string", True), "some_value")
def test_log(self):
with tempfile.TemporaryDirectory() as d:
tracker = CometMLTracker("test_project_with_config", d)
accelerator = Accelerator(log_with=tracker)
accelerator.init_trackers(None)
values = {"total_loss": 0.1, "iteration": 1, "my_text": "some_value"}
accelerator.log(values, step=0)
accelerator.end_training()
log = os.listdir(d)[0] # Comet is nice, it's just a zip file here
# We parse the raw logs
p = os.path.join(d, log)
archive = zipfile.ZipFile(p, "r")
log = archive.open("messages.json").read().decode("utf-8")
list_of_json = log.split("\n")[:-1]
self.assertEqual(self.get_value_from_key(list_of_json, "curr_step", True), 0)
self.assertEqual(self.get_value_from_key(list_of_json, "total_loss"), 0.1)
self.assertEqual(self.get_value_from_key(list_of_json, "iteration"), 1)
self.assertEqual(self.get_value_from_key(list_of_json, "my_text"), "some_value")
class MyCustomTracker(GeneralTracker):
"Basic tracker that writes to a csv for testing"
_col_names = [
"total_loss",
"iteration",
"my_text",
"learning_rate",
"num_iterations",
"some_boolean",
"some_string",
]
name = "my_custom_tracker"
requires_logging_directory = False
def __init__(self, dir: str):
self.f = open(f"{dir}/log.csv", "w+")
self.writer = csv.DictWriter(self.f, fieldnames=self._col_names)
self.writer.writeheader()
@property
def tracker(self):
return self.writer
def store_init_configuration(self, values: dict):
logger.info("Call init")
self.writer.writerow(values)
def log(self, values: dict, step: Optional[int]):
logger.info("Call log")
self.writer.writerow(values)
def finish(self):
self.f.close()
class CustomTrackerTestCase(unittest.TestCase):
def test_init_trackers(self):
with tempfile.TemporaryDirectory() as d:
tracker = MyCustomTracker(d)
accelerator = Accelerator(log_with=tracker)
config = {"num_iterations": 12, "learning_rate": 1e-2, "some_boolean": False, "some_string": "some_value"}
accelerator.init_trackers("Some name", config)
accelerator.end_training()
with open(f"{d}/log.csv", "r") as f:
data = csv.DictReader(f)
data = next(data)
truth = {
"total_loss": "",
"iteration": "",
"my_text": "",
"learning_rate": "0.01",
"num_iterations": "12",
"some_boolean": "False",
"some_string": "some_value",
}
self.assertDictEqual(data, truth)
def test_log(self):
with tempfile.TemporaryDirectory() as d:
tracker = MyCustomTracker(d)
accelerator = Accelerator(log_with=tracker)
accelerator.init_trackers("Some name")
values = {"total_loss": 0.1, "iteration": 1, "my_text": "some_value"}
accelerator.log(values, step=0)
accelerator.end_training()
with open(f"{d}/log.csv", "r") as f:
data = csv.DictReader(f)
data = next(data)
truth = {
"total_loss": "0.1",
"iteration": "1",
"my_text": "some_value",
"learning_rate": "",
"num_iterations": "",
"some_boolean": "",
"some_string": "",
}
self.assertDictEqual(data, truth)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_scheduler.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import unittest
from functools import partial
import torch
from accelerate import Accelerator, debug_launcher
from accelerate.state import AcceleratorState, GradientState
from accelerate.test_utils import require_cpu, require_huggingface_suite
from accelerate.utils import GradientAccumulationPlugin
def one_cycle_test(num_processes=2, step_scheduler_with_optimizer=True, split_batches=False):
accelerator = Accelerator(step_scheduler_with_optimizer=step_scheduler_with_optimizer, split_batches=split_batches)
model = torch.nn.Linear(2, 4)
optimizer = torch.optim.AdamW(model.parameters(), lr=1.0)
scheduler = torch.optim.lr_scheduler.OneCycleLR(optimizer, max_lr=0.01, steps_per_epoch=2, epochs=1)
model, optimizer, scheduler = accelerator.prepare(model, optimizer, scheduler)
# Optimizer has stepped
scheduler.step()
if step_scheduler_with_optimizer or (num_processes == 1):
assert (
scheduler.scheduler.last_epoch == num_processes
), f"Last Epoch ({scheduler.scheduler.last_epoch}) != Num Processes ({num_processes})"
else:
assert (
scheduler.scheduler.last_epoch != num_processes
), f"Last Epoch ({scheduler.scheduler.last_epoch}) == Num Processes ({num_processes})"
def lambda_test(num_processes=2, step_scheduler_with_optimizer=True, split_batches=False):
accelerator = Accelerator(step_scheduler_with_optimizer=step_scheduler_with_optimizer, split_batches=split_batches)
model = torch.nn.Linear(2, 4)
optimizer = torch.optim.AdamW(model.parameters(), lr=1.0)
scheduler = torch.optim.lr_scheduler.LambdaLR(optimizer, lr_lambda=lambda n: 1 - n / 10)
model, optimizer, scheduler = accelerator.prepare(model, optimizer, scheduler)
# Optimizer has stepped
optimizer._is_overflow = False
scheduler.step()
expected_lr = 1 - (num_processes if (step_scheduler_with_optimizer and not split_batches) else 1) / 10
assert (
scheduler.get_last_lr()[0] == expected_lr
), f"Wrong lr found at first step, expected {expected_lr}, got {scheduler.get_last_lr()[0]}"
# Optimizer has not stepped
optimizer._is_overflow = True
scheduler.step()
if not step_scheduler_with_optimizer:
expected_lr = 1 - 2 / 10
assert (
scheduler.get_last_lr()[0] == expected_lr
), f"Wrong lr found at second step, expected {expected_lr}, got {scheduler.get_last_lr()[0]}"
def accumulation_test(num_processes: int = 2):
"""
With this test, an observed batch size of 64 should result in neglible
differences in the scheduler after going through the correct number of steps.
Uses single, two, and four steps to test.
"""
from transformers import get_linear_schedule_with_warmup
steps = [1, 2, 4]
for num_steps in steps:
plugin = GradientAccumulationPlugin(num_steps=num_steps, adjust_scheduler=num_steps > 1)
accelerator = Accelerator(gradient_accumulation_plugin=plugin)
model = torch.nn.Linear(2, 4)
optimizer = torch.optim.AdamW(model.parameters(), lr=10.0)
scheduler = get_linear_schedule_with_warmup(optimizer=optimizer, num_warmup_steps=0, num_training_steps=20)
model, optimizer, scheduler = accelerator.prepare(model, optimizer, scheduler)
for i in range(10 * num_steps):
with accelerator.accumulate(model):
optimizer.step()
scheduler.step()
if i == (10 * num_steps - 2):
assert (
scheduler.get_last_lr()[0] != 0
), f"Wrong lr found at second-to-last step, expected non-zero, got {scheduler.get_last_lr()[0]}. num_steps: {num_steps}"
assert (
scheduler.get_last_lr()[0] == 0
), f"Wrong lr found at last step, expected 0, got {scheduler.get_last_lr()[0]}"
GradientState._reset_state()
@require_cpu
class SchedulerTester(unittest.TestCase):
def test_lambda_scheduler_steps_with_optimizer_single_process(self):
debug_launcher(partial(lambda_test, num_processes=1), num_processes=1)
debug_launcher(partial(lambda_test, num_processes=1, split_batches=True), num_processes=1)
def test_one_cycle_scheduler_steps_with_optimizer_single_process(self):
debug_launcher(partial(one_cycle_test, num_processes=1), num_processes=1)
debug_launcher(partial(one_cycle_test, num_processes=1, split_batches=True), num_processes=1)
def test_lambda_scheduler_not_step_with_optimizer_single_process(self):
debug_launcher(partial(lambda_test, num_processes=1, step_scheduler_with_optimizer=False), num_processes=1)
def test_one_cycle_scheduler_not_step_with_optimizer_single_process(self):
debug_launcher(partial(one_cycle_test, num_processes=1, step_scheduler_with_optimizer=False), num_processes=1)
def test_lambda_scheduler_steps_with_optimizer_multiprocess(self):
AcceleratorState._reset_state(True)
debug_launcher(lambda_test)
debug_launcher(partial(lambda_test, num_processes=1, split_batches=True), num_processes=1)
def test_one_cycle_scheduler_steps_with_optimizer_multiprocess(self):
AcceleratorState._reset_state(True)
debug_launcher(one_cycle_test)
debug_launcher(partial(one_cycle_test, num_processes=1, split_batches=True), num_processes=1)
def test_lambda_scheduler_not_step_with_optimizer_multiprocess(self):
AcceleratorState._reset_state(True)
debug_launcher(partial(lambda_test, step_scheduler_with_optimizer=False))
def test_one_cycle_scheduler_not_step_with_optimizer_multiprocess(self):
AcceleratorState._reset_state(True)
debug_launcher(partial(one_cycle_test, step_scheduler_with_optimizer=False))
@require_huggingface_suite
def test_accumulation(self):
AcceleratorState._reset_state(True)
debug_launcher(partial(accumulation_test, num_processes=1))
debug_launcher(accumulation_test)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_offload.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
import unittest
from tempfile import TemporaryDirectory
import torch
import torch.nn as nn
from accelerate.utils import (
OffloadedWeightsLoader,
extract_submodules_state_dict,
load_offloaded_weight,
offload_state_dict,
offload_weight,
)
class ModelForTest(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(3, 4)
self.batchnorm = nn.BatchNorm1d(4)
self.linear2 = nn.Linear(4, 5)
def forward(self, x):
return self.linear2(self.batchnorm(self.linear1(x)))
class OffloadTester(unittest.TestCase):
def test_offload_state_dict(self):
model = ModelForTest()
with TemporaryDirectory() as tmp_dir:
offload_state_dict(tmp_dir, model.state_dict())
index_file = os.path.join(tmp_dir, "index.json")
self.assertTrue(os.path.isfile(index_file))
# TODO: add tests on what is inside the index
for key in ["linear1.weight", "linear1.bias", "linear2.weight", "linear2.bias"]:
weight_file = os.path.join(tmp_dir, f"{key}.dat")
self.assertTrue(os.path.isfile(weight_file))
# TODO: add tests on the fact weights are properly loaded
def test_offload_weight(self):
dtypes = [torch.float16, torch.float32, torch.bfloat16]
for dtype in dtypes:
weight = torch.randn(2, 3, dtype=dtype)
with TemporaryDirectory() as tmp_dir:
index = offload_weight(weight, "weight", tmp_dir, {})
weight_file = os.path.join(tmp_dir, "weight.dat")
self.assertTrue(os.path.isfile(weight_file))
self.assertDictEqual(index, {"weight": {"shape": [2, 3], "dtype": str(dtype).split(".")[1]}})
new_weight = load_offloaded_weight(weight_file, index["weight"])
self.assertTrue(torch.equal(weight, new_weight))
def test_offload_weights_loader(self):
model = ModelForTest()
state_dict = model.state_dict()
cpu_part = {k: v for k, v in state_dict.items() if "linear2" not in k}
disk_part = {k: v for k, v in state_dict.items() if "linear2" in k}
with TemporaryDirectory() as tmp_dir:
offload_state_dict(tmp_dir, disk_part)
weight_map = OffloadedWeightsLoader(state_dict=cpu_part, save_folder=tmp_dir)
# Every key is there with the right value
self.assertEqual(sorted(weight_map), sorted(state_dict.keys()))
for key, param in state_dict.items():
self.assertTrue(torch.allclose(param, weight_map[key]))
cpu_part = {k: v for k, v in state_dict.items() if "weight" in k}
disk_part = {k: v for k, v in state_dict.items() if "weight" not in k}
with TemporaryDirectory() as tmp_dir:
offload_state_dict(tmp_dir, disk_part)
weight_map = OffloadedWeightsLoader(state_dict=cpu_part, save_folder=tmp_dir)
# Every key is there with the right value
self.assertEqual(sorted(weight_map), sorted(state_dict.keys()))
for key, param in state_dict.items():
self.assertTrue(torch.allclose(param, weight_map[key]))
with TemporaryDirectory() as tmp_dir:
offload_state_dict(tmp_dir, state_dict)
# Duplicates are removed
weight_map = OffloadedWeightsLoader(state_dict=cpu_part, save_folder=tmp_dir)
# Every key is there with the right value
self.assertEqual(sorted(weight_map), sorted(state_dict.keys()))
for key, param in state_dict.items():
self.assertTrue(torch.allclose(param, weight_map[key]))
def test_extract_submodules_state_dict(self):
state_dict = {"a.1": 0, "a.10": 1, "a.2": 2}
extracted = extract_submodules_state_dict(state_dict, ["a.1", "a.2"])
self.assertDictEqual(extracted, {"a.1": 0, "a.2": 2})
state_dict = {"a.1.a": 0, "a.10.a": 1, "a.2.a": 2}
extracted = extract_submodules_state_dict(state_dict, ["a.1", "a.2"])
self.assertDictEqual(extracted, {"a.1.a": 0, "a.2.a": 2})
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_kwargs_handlers.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import os
import unittest
from dataclasses import dataclass
import torch
from accelerate import Accelerator, DistributedDataParallelKwargs, GradScalerKwargs
from accelerate.state import AcceleratorState
from accelerate.test_utils import execute_subprocess_async, require_cuda, require_multi_gpu
from accelerate.utils import AutocastKwargs, KwargsHandler, TorchDynamoPlugin, clear_environment
@dataclass
class MockClass(KwargsHandler):
a: int = 0
b: bool = False
c: float = 3.0
class KwargsHandlerTester(unittest.TestCase):
def test_kwargs_handler(self):
# If no defaults are changed, `to_kwargs` returns an empty dict.
self.assertDictEqual(MockClass().to_kwargs(), {})
self.assertDictEqual(MockClass(a=2).to_kwargs(), {"a": 2})
self.assertDictEqual(MockClass(a=2, b=True).to_kwargs(), {"a": 2, "b": True})
self.assertDictEqual(MockClass(a=2, c=2.25).to_kwargs(), {"a": 2, "c": 2.25})
@require_cuda
def test_grad_scaler_kwargs(self):
# If no defaults are changed, `to_kwargs` returns an empty dict.
scaler_handler = GradScalerKwargs(init_scale=1024, growth_factor=2)
AcceleratorState._reset_state()
accelerator = Accelerator(mixed_precision="fp16", kwargs_handlers=[scaler_handler])
print(accelerator.use_fp16)
scaler = accelerator.scaler
# Check the kwargs have been applied
self.assertEqual(scaler._init_scale, 1024.0)
self.assertEqual(scaler._growth_factor, 2.0)
# Check the other values are at the default
self.assertEqual(scaler._backoff_factor, 0.5)
self.assertEqual(scaler._growth_interval, 2000)
self.assertEqual(scaler._enabled, True)
@require_multi_gpu
def test_ddp_kwargs(self):
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", inspect.getfile(self.__class__)]
execute_subprocess_async(cmd, env=os.environ.copy())
@require_cuda
def test_autocast_kwargs(self):
kwargs = AutocastKwargs(enabled=False)
AcceleratorState._reset_state()
accelerator = Accelerator(mixed_precision="fp16")
a_float32 = torch.rand((8, 8), device=accelerator.device)
b_float32 = torch.rand((8, 8), device=accelerator.device)
c_float32 = torch.rand((8, 8), device=accelerator.device)
d_float32 = torch.rand((8, 8), device=accelerator.device)
with accelerator.autocast():
e_float16 = torch.mm(a_float32, b_float32)
assert e_float16.dtype == torch.float16
with accelerator.autocast(autocast_handler=kwargs):
# Convert e_float16 to float32
f_float32 = torch.mm(c_float32, e_float16.float())
assert f_float32.dtype == torch.float32
g_float16 = torch.mm(d_float32, f_float32)
# We should be back in fp16
assert g_float16.dtype == torch.float16
def test_torch_dynamo_plugin(self):
with clear_environment():
prefix = "ACCELERATE_DYNAMO_"
# nvfuser's dynamo backend name is "nvprims_nvfuser"
# use "nvfuser" here to cause exception if this test causes os.environ changed permanently
os.environ[prefix + "BACKEND"] = "nvfuser"
os.environ[prefix + "MODE"] = "reduce-overhead"
dynamo_plugin_kwargs = TorchDynamoPlugin().to_kwargs()
self.assertEqual(dynamo_plugin_kwargs, {"backend": "nvfuser", "mode": "reduce-overhead"})
if __name__ == "__main__":
ddp_scaler = DistributedDataParallelKwargs(bucket_cap_mb=15, find_unused_parameters=True)
accelerator = Accelerator(kwargs_handlers=[ddp_scaler])
model = torch.nn.Linear(100, 200)
model = accelerator.prepare(model)
# Check the values changed in kwargs
error_msg = ""
observed_bucket_cap_map = model.bucket_bytes_cap // (1024 * 1024)
if observed_bucket_cap_map != 15:
error_msg += f"Kwargs badly passed, should have `15` but found {observed_bucket_cap_map}.\n"
if model.find_unused_parameters is not True:
error_msg += f"Kwargs badly passed, should have `True` but found {model.find_unused_parameters}.\n"
# Check the values of the defaults
if model.dim != 0:
error_msg += f"Default value not respected, should have `0` but found {model.dim}.\n"
if model.broadcast_buffers is not True:
error_msg += f"Default value not respected, should have `True` but found {model.broadcast_buffers}.\n"
if model.gradient_as_bucket_view is not False:
error_msg += f"Default value not respected, should have `False` but found {model.gradient_as_bucket_view}.\n"
# Raise error at the end to make sure we don't stop at the first failure.
if len(error_msg) > 0:
raise ValueError(error_msg)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_big_modeling.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
import unittest
from tempfile import TemporaryDirectory
import torch
import torch.nn as nn
from transformers import AutoModelForCausalLM, AutoTokenizer
from accelerate.big_modeling import (
cpu_offload,
cpu_offload_with_hook,
disk_offload,
dispatch_model,
init_empty_weights,
init_on_device,
load_checkpoint_and_dispatch,
)
from accelerate.hooks import remove_hook_from_submodules
from accelerate.test_utils import require_bnb, require_cuda, require_mps, require_multi_gpu, slow
from accelerate.utils import offload_state_dict
class ModelForTest(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(3, 4)
self.batchnorm = nn.BatchNorm1d(4)
self.linear2 = nn.Linear(4, 5)
def forward(self, x):
return self.linear2(self.batchnorm(self.linear1(x)))
class ModelForTestTiedWeights(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(4, 4)
self.batchnorm = nn.BatchNorm1d(4)
self.linear2 = nn.Linear(4, 4)
def forward(self, x):
return self.linear2(self.batchnorm(self.linear1(x)))
class BiggerModelForTest(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(3, 4)
self.linear2 = nn.Linear(4, 5)
self.batchnorm = nn.BatchNorm1d(5)
self.linear3 = nn.Linear(5, 6)
self.linear4 = nn.Linear(6, 5)
def forward(self, x):
return self.linear4(self.linear3(self.batchnorm(self.linear2(self.linear1(x)))))
# To test preload_module_classes
class ModuleWithUnusedSubModules(nn.Module):
def __init__(self, input_dim, output_dim):
super().__init__()
self.linear = nn.Linear(input_dim, output_dim)
def forward(self, x):
return x @ self.linear.weight.t() + self.linear.bias
class ModelWithUnusedSubModulesForTest(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = ModuleWithUnusedSubModules(3, 4)
self.linear2 = ModuleWithUnusedSubModules(4, 5)
self.batchnorm = nn.BatchNorm1d(5)
self.linear3 = ModuleWithUnusedSubModules(5, 6)
self.linear4 = ModuleWithUnusedSubModules(6, 5)
def forward(self, x):
return self.linear4(self.linear3(self.batchnorm(self.linear2(self.linear1(x)))))
class BigModelingTester(unittest.TestCase):
def test_init_empty_weights(self):
# base use
with init_empty_weights():
module = nn.Linear(4, 5)
self.assertEqual(module.weight.device, torch.device("meta"))
# base use with buffers, they are not touched
with init_empty_weights():
module = nn.BatchNorm1d(4)
self.assertEqual(module.weight.device, torch.device("meta"))
self.assertEqual(module.running_mean.device, torch.device("cpu"))
# Use with include_buffers=True
with init_empty_weights(include_buffers=True):
module = nn.BatchNorm1d(4)
self.assertEqual(module.weight.device, torch.device("meta"))
self.assertEqual(module.running_mean.device, torch.device("meta"))
# Double check we didn't break PyTorch
module = nn.BatchNorm1d(4)
self.assertEqual(module.weight.device, torch.device("cpu"))
self.assertEqual(module.running_mean.device, torch.device("cpu"))
def test_init_empty_weights_very_large_model(self):
# This is a 100 billion parameters model.
with init_empty_weights():
_ = nn.Sequential(*[nn.Linear(10000, 10000) for _ in range(1000)])
@require_cuda
def test_init_on_device_cuda(self):
device = torch.device("cuda:0")
with init_on_device(device):
model = nn.Linear(10, 10)
self.assertEqual(model.weight.device, device)
self.assertEqual(model.weight.device, device)
@require_mps
def test_init_on_device_mps(self):
device = torch.device("mps:0")
with init_on_device(device):
model = nn.Linear(10, 10)
self.assertEqual(model.weight.device, device)
self.assertEqual(model.weight.device, device)
def test_cpu_offload(self):
model = ModelForTest()
x = torch.randn(2, 3)
expected = model(x)
device = torch.device(0 if torch.cuda.is_available() else "cpu")
cpu_offload(model, execution_device=device)
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
# Clean up for next test.
remove_hook_from_submodules(model)
cpu_offload(model, execution_device=device, offload_buffers=True)
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
def test_cpu_offload_with_unused_submodules(self):
model = ModelWithUnusedSubModulesForTest()
x = torch.randn(2, 3)
expected = model(x)
device = torch.device(0 if torch.cuda.is_available() else "cpu")
cpu_offload(model, execution_device=device, preload_module_classes=["ModuleWithUnusedSubModules"])
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
# Clean up for next test.
remove_hook_from_submodules(model)
cpu_offload(
model,
execution_device=device,
offload_buffers=True,
preload_module_classes=["ModuleWithUnusedSubModules"],
)
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
@slow
@require_cuda
def test_cpu_offload_gpt2(self):
tokenizer = AutoTokenizer.from_pretrained("gpt2")
inputs = tokenizer("Hello world! My name is", return_tensors="pt").to(0)
gpt2 = AutoModelForCausalLM.from_pretrained("gpt2")
cpu_offload(gpt2, execution_device=0)
outputs = gpt2.generate(inputs["input_ids"])
self.assertEqual(
tokenizer.decode(outputs[0].tolist()),
"Hello world! My name is Kiyoshi, and I'm a student at the University of Tokyo",
)
def test_disk_offload(self):
model = ModelForTest()
x = torch.randn(2, 3)
expected = model(x)
device = torch.device(0 if torch.cuda.is_available() else "cpu")
with TemporaryDirectory() as tmp_dir:
disk_offload(model, tmp_dir, execution_device=device)
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
# Clean up for next test.
remove_hook_from_submodules(model)
with TemporaryDirectory() as tmp_dir:
disk_offload(model, tmp_dir, execution_device=device, offload_buffers=True)
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
def test_disk_offload_with_unused_submodules(self):
model = ModelWithUnusedSubModulesForTest()
x = torch.randn(2, 3)
expected = model(x)
device = torch.device(0 if torch.cuda.is_available() else "cpu")
with TemporaryDirectory() as tmp_dir:
disk_offload(
model, tmp_dir, execution_device=device, preload_module_classes=["ModuleWithUnusedSubModules"]
)
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
# Clean up for next test.
remove_hook_from_submodules(model)
with TemporaryDirectory() as tmp_dir:
disk_offload(
model,
tmp_dir,
execution_device=device,
offload_buffers=True,
preload_module_classes=["ModuleWithUnusedSubModules"],
)
output = model(x)
self.assertTrue(
torch.allclose(expected, output.cpu(), 1e-4, 1e-5), msg=f"Expected: {expected}\nActual: {output.cpu()}"
)
@slow
@require_cuda
def test_disk_offload_gpt2(self):
tokenizer = AutoTokenizer.from_pretrained("gpt2")
inputs = tokenizer("Hello world! My name is", return_tensors="pt").to(0)
gpt2 = AutoModelForCausalLM.from_pretrained("gpt2")
with TemporaryDirectory() as tmp_dir:
disk_offload(gpt2, tmp_dir, execution_device=0)
outputs = gpt2.generate(inputs["input_ids"])
self.assertEqual(
tokenizer.decode(outputs[0].tolist()),
"Hello world! My name is Kiyoshi, and I'm a student at the University of Tokyo",
)
@require_cuda
def test_dispatch_model(self):
model = ModelForTest()
device_map = {"linear1": "disk", "batchnorm": "cpu", "linear2": 0}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
dispatch_model(model, device_map, offload_dir=tmp_dir)
output = model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_mps
def test_dispatch_model_mps(self):
model = ModelForTest()
device_map = {"linear1": "mps", "batchnorm": "disk", "linear2": "disk"}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
dispatch_model(model, device_map, offload_dir=tmp_dir)
output = model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_cuda
def test_dispatch_model_tied_weights(self):
model = ModelForTestTiedWeights()
model.linear1.weight = model.linear2.weight
device_map = {"linear1": 0, "batchnorm": 0, "linear2": 0}
dispatch_model(model, device_map)
self.assertIs(model.linear2.weight, model.linear1.weight)
@require_multi_gpu
def test_dispatch_model_multi_gpu(self):
model = BiggerModelForTest()
device_map = {"linear1": "cpu", "linear2": "disk", "batchnorm": "cpu", "linear3": 0, "linear4": 1}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
dispatch_model(model, device_map, offload_dir=tmp_dir)
output = model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@slow
@require_multi_gpu
def test_dispatch_model_gpt2_on_two_gpus(self):
tokenizer = AutoTokenizer.from_pretrained("gpt2")
inputs = tokenizer("Hello world! My name is", return_tensors="pt").to(0)
gpt2 = AutoModelForCausalLM.from_pretrained("gpt2")
# Dispatch on GPUs 0 and 1
device_map = {
"transformer.wte": 0,
"transformer.wpe": 0,
"transformer.ln_f": 1,
"lm_head": 0,
}
for i in range(12):
device_map[f"transformer.h.{i}"] = 0 if i <= 5 else 1
gpt2 = dispatch_model(gpt2, device_map)
outputs = gpt2.generate(inputs["input_ids"])
self.assertEqual(
tokenizer.decode(outputs[0].tolist()),
"Hello world! My name is Kiyoshi, and I'm a student at the University of Tokyo",
)
# Dispatch with a bit of CPU offload
gpt2 = AutoModelForCausalLM.from_pretrained("gpt2")
for i in range(4):
device_map[f"transformer.h.{i}"] = "cpu"
gpt2 = dispatch_model(gpt2, device_map)
outputs = gpt2.generate(inputs["input_ids"])
self.assertEqual(
tokenizer.decode(outputs[0].tolist()),
"Hello world! My name is Kiyoshi, and I'm a student at the University of Tokyo",
)
# Dispatch with a bit of CPU and disk offload
gpt2 = AutoModelForCausalLM.from_pretrained("gpt2")
for i in range(2):
device_map[f"transformer.h.{i}"] = "disk"
with TemporaryDirectory() as tmp_dir:
state_dict = {
k: p for k, p in gpt2.state_dict().items() if "transformer.h.0" in k or "transformer.h.1" in k
}
offload_state_dict(tmp_dir, state_dict)
gpt2 = dispatch_model(gpt2, device_map, offload_dir=tmp_dir)
outputs = gpt2.generate(inputs["input_ids"])
self.assertEqual(
tokenizer.decode(outputs[0].tolist()),
"Hello world! My name is Kiyoshi, and I'm a student at the University of Tokyo",
)
@require_cuda
def test_dispatch_model_with_unused_submodules(self):
model = ModelWithUnusedSubModulesForTest()
device_map = {"linear1": "cpu", "linear2": "disk", "batchnorm": "cpu", "linear3": 0, "linear4": 0}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
dispatch_model(
model, device_map, offload_dir=tmp_dir, preload_module_classes=["ModuleWithUnusedSubModules"]
)
output = model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_mps
def test_dispatch_model_with_unused_submodules_mps(self):
model = ModelWithUnusedSubModulesForTest()
device_map = {"linear1": "mps", "linear2": "mps", "batchnorm": "mps", "linear3": "mps", "linear4": "disk"}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
dispatch_model(
model, device_map, offload_dir=tmp_dir, preload_module_classes=["ModuleWithUnusedSubModules"]
)
output = model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_multi_gpu
def test_dispatch_model_with_unused_submodules_multi_gpu(self):
model = ModelWithUnusedSubModulesForTest()
device_map = {"linear1": "cpu", "linear2": "disk", "batchnorm": "cpu", "linear3": 0, "linear4": 1}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
dispatch_model(
model, device_map, offload_dir=tmp_dir, preload_module_classes=["ModuleWithUnusedSubModules"]
)
output = model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_cuda
def test_load_checkpoint_and_dispatch(self):
model = ModelForTest()
device_map = {"linear1": "cpu", "batchnorm": "cpu", "linear2": 0}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
checkpoint = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), checkpoint)
new_model = ModelForTest()
new_model = load_checkpoint_and_dispatch(new_model, checkpoint, device_map=device_map)
# CPU-offloaded weights are on the meta device while waiting for the forward pass.
self.assertEqual(new_model.linear1.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear2.weight.device, torch.device(0))
output = new_model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_mps
def test_load_checkpoint_and_dispatch_mps(self):
model = ModelForTest()
device_map = {"linear1": "mps", "batchnorm": "mps", "linear2": "disk"}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
checkpoint = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), checkpoint)
new_model = ModelForTest()
new_model = load_checkpoint_and_dispatch(
new_model, checkpoint, device_map=device_map, offload_folder=tmp_dir
)
# CPU-offloaded weights are on the meta device while waiting for the forward pass.
self.assertEqual(new_model.linear1.weight.device, torch.device("mps:0"))
self.assertEqual(new_model.linear2.weight.device, torch.device("meta"))
output = new_model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_multi_gpu
def test_load_checkpoint_and_dispatch_multi_gpu(self):
model = BiggerModelForTest()
device_map = {"linear1": "cpu", "linear2": "cpu", "batchnorm": 0, "linear3": 0, "linear4": 1}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
checkpoint = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), checkpoint)
new_model = BiggerModelForTest()
new_model = load_checkpoint_and_dispatch(new_model, checkpoint, device_map=device_map)
# CPU-offloaded weights are on the meta device while waiting for the forward pass.
self.assertEqual(new_model.linear1.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear2.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear3.weight.device, torch.device(0))
self.assertEqual(new_model.linear4.weight.device, torch.device(1))
output = new_model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_cuda
def test_load_checkpoint_and_dispatch_with_unused_submodules(self):
model = ModelWithUnusedSubModulesForTest()
device_map = {"linear1": "cpu", "linear2": "cpu", "batchnorm": 0, "linear3": 0, "linear4": 0}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
checkpoint = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), checkpoint)
new_model = ModelWithUnusedSubModulesForTest()
new_model = load_checkpoint_and_dispatch(
new_model, checkpoint, device_map=device_map, preload_module_classes=["ModuleWithUnusedSubModules"]
)
# CPU-offloaded weights are on the meta device while waiting for the forward pass.
self.assertEqual(new_model.linear1.linear.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear2.linear.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear3.linear.weight.device, torch.device(0))
self.assertEqual(new_model.linear4.linear.weight.device, torch.device(0))
output = new_model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_mps
def test_load_checkpoint_and_dispatch_with_unused_submodules_mps(self):
model = ModelWithUnusedSubModulesForTest()
device_map = {"linear1": "mps", "linear2": "mps", "batchnorm": "mps", "linear3": "disk", "linear4": "disk"}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
checkpoint = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), checkpoint)
new_model = ModelWithUnusedSubModulesForTest()
new_model = load_checkpoint_and_dispatch(
new_model,
checkpoint,
device_map=device_map,
preload_module_classes=["ModuleWithUnusedSubModules"],
offload_folder=tmp_dir,
)
# CPU-offloaded weights are on the meta device while waiting for the forward pass.
self.assertEqual(new_model.linear1.linear.weight.device, torch.device("mps:0"))
self.assertEqual(new_model.linear2.linear.weight.device, torch.device("mps:0"))
self.assertEqual(new_model.linear3.linear.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear4.linear.weight.device, torch.device("meta"))
output = new_model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_multi_gpu
def test_load_checkpoint_and_dispatch_multi_gpu_with_unused_submodules(self):
model = ModelWithUnusedSubModulesForTest()
device_map = {"linear1": "cpu", "linear2": "cpu", "batchnorm": 0, "linear3": 0, "linear4": 1}
x = torch.randn(2, 3)
expected = model(x)
with TemporaryDirectory() as tmp_dir:
checkpoint = os.path.join(tmp_dir, "pt_model.bin")
torch.save(model.state_dict(), checkpoint)
new_model = ModelWithUnusedSubModulesForTest()
new_model = load_checkpoint_and_dispatch(
new_model, checkpoint, device_map=device_map, preload_module_classes=["ModuleWithUnusedSubModules"]
)
# CPU-offloaded weights are on the meta device while waiting for the forward pass.
self.assertEqual(new_model.linear1.linear.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear2.linear.weight.device, torch.device("meta"))
self.assertEqual(new_model.linear3.linear.weight.device, torch.device(0))
self.assertEqual(new_model.linear4.linear.weight.device, torch.device(1))
output = new_model(x)
self.assertTrue(torch.allclose(expected, output.cpu(), atol=1e-5))
@require_cuda
def test_cpu_offload_with_hook(self):
model1 = torch.nn.Linear(4, 5)
model1, hook1 = cpu_offload_with_hook(model1)
self.assertEqual(model1.weight.device, torch.device("cpu"))
inputs = torch.randn(3, 4)
outputs = model1(inputs)
self.assertEqual(outputs.device, torch.device(0))
self.assertEqual(model1.weight.device, torch.device(0))
hook1.offload()
self.assertEqual(model1.weight.device, torch.device("cpu"))
model2 = torch.nn.Linear(5, 5)
model2, hook2 = cpu_offload_with_hook(model2, prev_module_hook=hook1)
self.assertEqual(model2.weight.device, torch.device("cpu"))
outputs = model1(inputs)
self.assertEqual(outputs.device, torch.device(0))
self.assertEqual(model1.weight.device, torch.device(0))
outputs = model2(outputs)
self.assertEqual(outputs.device, torch.device(0))
self.assertEqual(model1.weight.device, torch.device("cpu"))
self.assertEqual(model2.weight.device, torch.device(0))
hook2.offload()
self.assertEqual(model2.weight.device, torch.device("cpu"))
@slow
@require_bnb
@require_multi_gpu
def test_dispatch_model_bnb(self):
"""Tests that `dispatch_model` quantizes int8 layers"""
from huggingface_hub import hf_hub_download
from transformers import AutoConfig, AutoModel, BitsAndBytesConfig
from transformers.utils.bitsandbytes import replace_with_bnb_linear
with init_empty_weights():
model = AutoModel.from_config(AutoConfig.from_pretrained("bigscience/bloom-560m"))
# TODO: @younesbelkada remove the positional arg on the next `transformers` release
quantization_config = BitsAndBytesConfig(load_in_8bit=True)
model = replace_with_bnb_linear(
model, modules_to_not_convert=["lm_head"], quantization_config=quantization_config
)
# TODO: @younesbelkada remove this block on the next `transformers` release
for p in model.parameters():
p.requires_grad = False
model_path = hf_hub_download("bigscience/bloom-560m", "pytorch_model.bin")
model = load_checkpoint_and_dispatch(
model,
checkpoint=model_path,
# device_map="auto",
device_map="balanced",
)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.dtype == torch.int8)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.device.index == 0)
self.assertTrue(model.h[-1].self_attention.query_key_value.weight.dtype == torch.int8)
self.assertTrue(model.h[-1].self_attention.query_key_value.weight.device.index == 1)
@slow
@require_bnb
def test_dispatch_model_int8_simple(self):
"""Tests that `dispatch_model` quantizes int8 layers"""
from huggingface_hub import hf_hub_download
from transformers import AutoConfig, AutoModel, BitsAndBytesConfig
from transformers.utils.bitsandbytes import replace_with_bnb_linear
with init_empty_weights():
model = AutoModel.from_config(AutoConfig.from_pretrained("bigscience/bloom-560m"))
# TODO: @younesbelkada remove the positional arg on the next `transformers` release
quantization_config = BitsAndBytesConfig(load_in_8bit=True)
model = replace_with_bnb_linear(
model, modules_to_not_convert=["lm_head"], quantization_config=quantization_config
)
# TODO: @younesbelkada remove this block on the next `transformers` release
for p in model.parameters():
p.requires_grad = False
model_path = hf_hub_download("bigscience/bloom-560m", "pytorch_model.bin")
# test with auto
model = load_checkpoint_and_dispatch(
model,
checkpoint=model_path,
device_map="auto",
)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.dtype == torch.int8)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.device.index == 0)
with init_empty_weights():
model = AutoModel.from_config(AutoConfig.from_pretrained("bigscience/bloom-560m"))
# TODO: @younesbelkada remove the positional arg on the next `transformers` release
model = replace_with_bnb_linear(
model, modules_to_not_convert=["lm_head"], quantization_config=quantization_config
)
for p in model.parameters():
p.requires_grad = False
# test with str device map
model = load_checkpoint_and_dispatch(
model,
checkpoint=model_path,
device_map={"": torch.device("cuda:0")},
)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.dtype == torch.int8)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.device.index == 0)
with init_empty_weights():
model = AutoModel.from_config(AutoConfig.from_pretrained("bigscience/bloom-560m"))
# TODO: @younesbelkada remove the positional arg on the next `transformers` release
model = replace_with_bnb_linear(
model, modules_to_not_convert=["lm_head"], quantization_config=quantization_config
)
# TODO: @younesbelkada remove this block on the next `transformers` release
for p in model.parameters():
p.requires_grad = False
# test with torch.device device map
model = load_checkpoint_and_dispatch(
model,
checkpoint=model_path,
device_map={"": "cuda:0"},
)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.dtype == torch.int8)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.device.index == 0)
@slow
@require_bnb
@unittest.skip("Un-skip in the next transformers release")
def test_dipatch_model_fp4_simple(self):
"""Tests that `dispatch_model` quantizes fp4 layers"""
from huggingface_hub import hf_hub_download
from transformers import AutoConfig, AutoModel, BitsAndBytesConfig
from transformers.utils.bitsandbytes import replace_with_bnb_linear
with init_empty_weights():
model = AutoModel.from_config(AutoConfig.from_pretrained("bigscience/bloom-560m"))
quantization_config = BitsAndBytesConfig(load_in_4bit=True)
model = replace_with_bnb_linear(
model, modules_to_not_convert=["lm_head"], quantization_config=quantization_config
)
model_path = hf_hub_download("bigscience/bloom-560m", "pytorch_model.bin")
# test with auto
model = load_checkpoint_and_dispatch(
model,
checkpoint=model_path,
device_map="auto",
)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.dtype == torch.uint8)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.device.index == 0)
with init_empty_weights():
model = AutoModel.from_config(AutoConfig.from_pretrained("bigscience/bloom-560m"))
model = replace_with_bnb_linear(
model, modules_to_not_convert=["lm_head"], quantization_config=quantization_config
)
# test with str device map
model = load_checkpoint_and_dispatch(
model,
checkpoint=model_path,
device_map={"": torch.device("cuda:0")},
)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.dtype == torch.uint8)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.device.index == 0)
with init_empty_weights():
model = AutoModel.from_config(AutoConfig.from_pretrained("bigscience/bloom-560m"))
model = replace_with_bnb_linear(
model, modules_to_not_convert=["lm_head"], quantization_config=quantization_config
)
# test with torch.device device map
model = load_checkpoint_and_dispatch(
model,
checkpoint=model_path,
device_map={"": "cuda:0"},
)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.dtype == torch.uint8)
self.assertTrue(model.h[0].self_attention.query_key_value.weight.device.index == 0)
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_state_checkpointing.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import logging
import os
import random
import shutil
import tempfile
import unittest
import pytest
import torch
from torch import nn
from torch.utils.data import DataLoader, TensorDataset
from accelerate import Accelerator
from accelerate.test_utils import execute_subprocess_async, require_cuda
from accelerate.utils import ProjectConfiguration, set_seed
logger = logging.getLogger(__name__)
def dummy_dataloaders(a=2, b=3, batch_size=16, n_train_batches: int = 10, n_valid_batches: int = 2):
"Generates a tuple of dummy DataLoaders to test with"
def get_dataset(n_batches):
x = torch.randn(batch_size * n_batches, 1)
return TensorDataset(x, a * x + b + 0.1 * torch.randn(batch_size * n_batches, 1))
train_dataset = get_dataset(n_train_batches)
valid_dataset = get_dataset(n_valid_batches)
train_dataloader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size, num_workers=4)
valid_dataloader = DataLoader(valid_dataset, shuffle=False, batch_size=batch_size, num_workers=4)
return (train_dataloader, valid_dataloader)
def train(num_epochs, model, dataloader, optimizer, accelerator, scheduler=None):
"Trains for `num_epochs`"
rands = []
for epoch in range(num_epochs):
# Train quickly
model.train()
for batch in dataloader:
x, y = batch
outputs = model(x)
loss = torch.nn.functional.mse_loss(outputs, y)
accelerator.backward(loss)
optimizer.step()
optimizer.zero_grad()
rands.append(random.random()) # Introduce some randomness
if scheduler is not None:
scheduler.step()
return rands
class DummyModel(nn.Module):
"Simple model to do y=mx+b"
def __init__(self):
super().__init__()
self.a = nn.Parameter(torch.randn(1))
self.b = nn.Parameter(torch.randn(1))
def forward(self, x):
return x * self.a + self.b
class CheckpointTest(unittest.TestCase):
def test_with_save_limit(self):
with tempfile.TemporaryDirectory() as tmpdir:
set_seed(42)
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
train_dataloader, valid_dataloader = dummy_dataloaders()
project_config = ProjectConfiguration(total_limit=1, project_dir=tmpdir, automatic_checkpoint_naming=True)
# Train baseline
accelerator = Accelerator(project_config=project_config)
model, optimizer, train_dataloader, valid_dataloader = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader
)
# Save initial
accelerator.save_state()
# Save second state
accelerator.save_state()
self.assertEqual(len(os.listdir(accelerator.project_dir)), 1)
def test_can_resume_training_with_folder(self):
with tempfile.TemporaryDirectory() as tmpdir:
set_seed(42)
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
train_dataloader, valid_dataloader = dummy_dataloaders()
# Train baseline
accelerator = Accelerator()
model, optimizer, train_dataloader, valid_dataloader = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader
)
# Save initial
initial = os.path.join(tmpdir, "initial")
accelerator.save_state(initial)
(a, b) = model.a.item(), model.b.item()
opt_state = optimizer.state_dict()
ground_truth_rands = train(3, model, train_dataloader, optimizer, accelerator)
(a1, b1) = model.a.item(), model.b.item()
opt_state1 = optimizer.state_dict()
# Train partially
set_seed(42)
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
train_dataloader, valid_dataloader = dummy_dataloaders()
accelerator = Accelerator()
model, optimizer, train_dataloader, valid_dataloader = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader
)
accelerator.load_state(initial)
(a2, b2) = model.a.item(), model.b.item()
opt_state2 = optimizer.state_dict()
self.assertEqual(a, a2)
self.assertEqual(b, b2)
self.assertEqual(opt_state, opt_state2)
test_rands = train(2, model, train_dataloader, optimizer, accelerator)
# Save everything
checkpoint = os.path.join(tmpdir, "checkpoint")
accelerator.save_state(checkpoint)
# Load everything back in and make sure all states work
accelerator.load_state(checkpoint)
test_rands += train(1, model, train_dataloader, optimizer, accelerator)
(a3, b3) = model.a.item(), model.b.item()
opt_state3 = optimizer.state_dict()
self.assertEqual(a1, a3)
self.assertEqual(b1, b3)
self.assertEqual(opt_state1, opt_state3)
self.assertEqual(ground_truth_rands, test_rands)
def test_can_resume_training(self):
with tempfile.TemporaryDirectory() as tmpdir:
set_seed(42)
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
train_dataloader, valid_dataloader = dummy_dataloaders()
project_config = ProjectConfiguration(automatic_checkpoint_naming=True)
# Train baseline
accelerator = Accelerator(project_dir=tmpdir, project_config=project_config)
model, optimizer, train_dataloader, valid_dataloader = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader
)
# Save initial
accelerator.save_state()
(a, b) = model.a.item(), model.b.item()
opt_state = optimizer.state_dict()
ground_truth_rands = train(3, model, train_dataloader, optimizer, accelerator)
(a1, b1) = model.a.item(), model.b.item()
opt_state1 = optimizer.state_dict()
# Train partially
set_seed(42)
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
train_dataloader, valid_dataloader = dummy_dataloaders()
project_config = ProjectConfiguration(iteration=1, automatic_checkpoint_naming=True)
accelerator = Accelerator(project_dir=tmpdir, project_config=project_config)
model, optimizer, train_dataloader, valid_dataloader = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader
)
accelerator.load_state(os.path.join(tmpdir, "checkpoints", "checkpoint_0"))
(a2, b2) = model.a.item(), model.b.item()
opt_state2 = optimizer.state_dict()
self.assertEqual(a, a2)
self.assertEqual(b, b2)
self.assertEqual(opt_state, opt_state2)
test_rands = train(2, model, train_dataloader, optimizer, accelerator)
# Save everything
accelerator.save_state()
# Load everything back in and make sure all states work
accelerator.load_state(os.path.join(tmpdir, "checkpoints", "checkpoint_1"))
test_rands += train(1, model, train_dataloader, optimizer, accelerator)
(a3, b3) = model.a.item(), model.b.item()
opt_state3 = optimizer.state_dict()
self.assertEqual(a1, a3)
self.assertEqual(b1, b3)
self.assertEqual(opt_state1, opt_state3)
self.assertEqual(ground_truth_rands, test_rands)
def test_invalid_registration(self):
t = torch.tensor([1, 2, 3])
t1 = torch.tensor([2, 3, 4])
net = DummyModel()
opt = torch.optim.Adam(net.parameters())
accelerator = Accelerator()
with self.assertRaises(ValueError) as ve:
accelerator.register_for_checkpointing(t, t1, net, opt)
message = str(ve.exception)
self.assertTrue("Item at index 0" in message)
self.assertTrue("Item at index 1" in message)
self.assertFalse("Item at index 2" in message)
self.assertFalse("Item at index 3" in message)
def test_with_scheduler(self):
with tempfile.TemporaryDirectory() as tmpdir:
set_seed(42)
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=1, gamma=0.99)
train_dataloader, valid_dataloader = dummy_dataloaders()
project_config = ProjectConfiguration(automatic_checkpoint_naming=True)
# Train baseline
accelerator = Accelerator(project_dir=tmpdir, project_config=project_config)
model, optimizer, train_dataloader, valid_dataloader, scheduler = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader, scheduler
)
# Save initial
accelerator.save_state()
scheduler_state = scheduler.state_dict()
train(3, model, train_dataloader, optimizer, accelerator, scheduler)
self.assertNotEqual(scheduler_state, scheduler.state_dict())
# Load everything back in and make sure all states work
accelerator.load_state(os.path.join(tmpdir, "checkpoints", "checkpoint_0"))
self.assertEqual(scheduler_state, scheduler.state_dict())
def test_automatic_loading(self):
with tempfile.TemporaryDirectory() as tmpdir:
set_seed(42)
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=1, gamma=0.99)
train_dataloader, valid_dataloader = dummy_dataloaders()
project_config = ProjectConfiguration(automatic_checkpoint_naming=True)
# Train baseline
accelerator = Accelerator(project_dir=tmpdir, project_config=project_config)
model, optimizer, train_dataloader, valid_dataloader, scheduler = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader, scheduler
)
# Save initial
accelerator.save_state()
train(2, model, train_dataloader, optimizer, accelerator, scheduler)
(a2, b2) = model.a.item(), model.b.item()
# Save a first time
accelerator.save_state()
train(1, model, train_dataloader, optimizer, accelerator, scheduler)
(a3, b3) = model.a.item(), model.b.item()
# Load back in the last saved checkpoint, should point to a2, b2
accelerator.load_state()
self.assertNotEqual(a3, model.a.item())
self.assertNotEqual(b3, model.b.item())
self.assertEqual(a2, model.a.item())
self.assertEqual(b2, model.b.item())
def test_checkpoint_deletion(self):
with tempfile.TemporaryDirectory() as tmpdir:
set_seed(42)
model = DummyModel()
project_config = ProjectConfiguration(automatic_checkpoint_naming=True, total_limit=2)
# Train baseline
accelerator = Accelerator(project_dir=tmpdir, project_config=project_config)
model = accelerator.prepare(model)
# Save 3 states:
for _ in range(11):
accelerator.save_state()
self.assertTrue(not os.path.exists(os.path.join(tmpdir, "checkpoints", "checkpoint_0")))
self.assertTrue(os.path.exists(os.path.join(tmpdir, "checkpoints", "checkpoint_9")))
self.assertTrue(os.path.exists(os.path.join(tmpdir, "checkpoints", "checkpoint_10")))
@require_cuda
def test_map_location(self):
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", inspect.getfile(self.__class__)]
execute_subprocess_async(cmd, env=os.environ.copy())
if __name__ == "__main__":
savedir = "/tmp/accelerate/state_checkpointing"
model = DummyModel()
optimizer = torch.optim.Adam(params=model.parameters(), lr=1e-3)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=1, gamma=0.99)
train_dataloader, valid_dataloader = dummy_dataloaders()
project_config = ProjectConfiguration(automatic_checkpoint_naming=True)
# Train baseline
accelerator = Accelerator(project_dir=savedir, project_config=project_config, mixed_precision="no")
if accelerator.process_index == 0:
if os.path.exists(savedir):
shutil.rmtree(savedir)
os.makedirs(savedir)
model, optimizer, train_dataloader, valid_dataloader, scheduler = accelerator.prepare(
model, optimizer, train_dataloader, valid_dataloader, scheduler
)
model, optimizer = accelerator.prepare(model, optimizer)
train(3, model, train_dataloader, optimizer, accelerator, scheduler)
# Check that the intial optimizer is loaded on the GPU
for group in optimizer.param_groups:
param_device = group["params"][0].device
break
assert param_device.type == accelerator.device.type
model = model.cpu()
accelerator.wait_for_everyone()
accelerator.save_state()
accelerator.wait_for_everyone()
# Check CPU state
accelerator.load_state(os.path.join(savedir, "checkpoints", "checkpoint_0"), map_location="cpu")
for group in optimizer.param_groups:
param_device = group["params"][0].device
break
assert (
param_device.type == torch.device("cpu").type
), f"Loaded optimizer states did not match, expected to be loaded on the CPU but got {param_device}"
# Check device state
model.to(accelerator.device)
accelerator.load_state(os.path.join(savedir, "checkpoints", "checkpoint_0"), map_location="on_device")
for group in optimizer.param_groups:
param_device = group["params"][0].device
break
assert (
param_device.type == accelerator.device.type
), f"Loaded optimizer states did not match, expected to be loaded on {accelerator.device} but got {param_device}"
# Check error
with pytest.raises(TypeError, match="Unsupported optimizer map location passed"):
accelerator.load_state(os.path.join(savedir, "checkpoints", "checkpoint_0"), map_location="invalid")
accelerator.wait_for_everyone()
if accelerator.process_index == 0:
shutil.rmtree(savedir)
accelerator.wait_for_everyone()
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/tests/test_metrics.py
|
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import os
import unittest
import torch
import accelerate
from accelerate import debug_launcher
from accelerate.test_utils import (
execute_subprocess_async,
require_cpu,
require_huggingface_suite,
require_multi_gpu,
require_single_gpu,
)
from accelerate.utils import patch_environment
@require_huggingface_suite
class MetricTester(unittest.TestCase):
def setUp(self):
mod_file = inspect.getfile(accelerate.test_utils)
self.test_file_path = os.path.sep.join(
mod_file.split(os.path.sep)[:-1] + ["scripts", "external_deps", "test_metrics.py"]
)
from accelerate.test_utils.scripts.external_deps import test_metrics # noqa: F401
self.test_metrics = test_metrics
@require_cpu
def test_metric_cpu_noop(self):
debug_launcher(self.test_metrics.main, num_processes=1)
@require_cpu
def test_metric_cpu_multi(self):
debug_launcher(self.test_metrics.main)
@require_single_gpu
def test_metric_gpu(self):
self.test_metrics.main()
@require_multi_gpu
def test_metric_gpu_multi(self):
print(f"Found {torch.cuda.device_count()} devices.")
cmd = ["torchrun", f"--nproc_per_node={torch.cuda.device_count()}", self.test_file_path]
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd, env=os.environ.copy())
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/deepspeed/ds_config_zero2.json
|
{
"fp16": {
"enabled": "auto",
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"bf16": {
"enabled": "auto"
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto",
"torch_adam": true,
"adam_w_mode": true
}
},
"scheduler": {
"type": "WarmupLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 2,
"offload_optimizer": {
"device": "cpu",
"pin_memory": true
},
"allgather_partitions": true,
"allgather_bucket_size": 2e8,
"overlap_comm": true,
"reduce_scatter": true,
"reduce_bucket_size": "auto",
"contiguous_gradients": true
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/deepspeed/test_deepspeed.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import io
import itertools
import json
import os
import tempfile
from copy import deepcopy
from pathlib import Path
import torch
from parameterized import parameterized
from torch.utils.data import DataLoader
from transformers import AutoModel, AutoModelForCausalLM, get_scheduler
from transformers.testing_utils import mockenv_context
from transformers.trainer_utils import set_seed
from transformers.utils import is_torch_bf16_available
import accelerate
from accelerate.accelerator import Accelerator
from accelerate.scheduler import AcceleratedScheduler
from accelerate.state import AcceleratorState
from accelerate.test_utils.testing import (
AccelerateTestCase,
TempDirTestCase,
execute_subprocess_async,
require_cuda,
require_deepspeed,
require_multi_gpu,
slow,
)
from accelerate.test_utils.training import RegressionDataset
from accelerate.utils.dataclasses import DeepSpeedPlugin
from accelerate.utils.deepspeed import (
DeepSpeedEngineWrapper,
DeepSpeedOptimizerWrapper,
DeepSpeedSchedulerWrapper,
DummyOptim,
DummyScheduler,
)
from accelerate.utils.other import patch_environment
set_seed(42)
T5_SMALL = "t5-small"
T5_TINY = "patrickvonplaten/t5-tiny-random"
GPT2_TINY = "sshleifer/tiny-gpt2"
ZERO2 = "zero2"
ZERO3 = "zero3"
FP16 = "fp16"
BF16 = "bf16"
CUSTOM_OPTIMIZER = "custom_optimizer"
CUSTOM_SCHEDULER = "custom_scheduler"
DS_OPTIMIZER = "deepspeed_optimizer"
DS_SCHEDULER = "deepspeed_scheduler"
stages = [ZERO2, ZERO3]
optims = [CUSTOM_OPTIMIZER, DS_OPTIMIZER]
schedulers = [CUSTOM_SCHEDULER, DS_SCHEDULER]
if is_torch_bf16_available():
dtypes = [FP16, BF16]
else:
dtypes = [FP16]
def parameterized_custom_name_func(func, param_num, param):
# customize the test name generator function as we want both params to appear in the sub-test
# name, as by default it shows only the first param
param_based_name = parameterized.to_safe_name("_".join(str(x) for x in param.args))
return f"{func.__name__}_{param_based_name}"
# Cartesian-product of zero stages with models to test
params = list(itertools.product(stages, dtypes))
optim_scheduler_params = list(itertools.product(optims, schedulers))
@require_deepspeed
@require_cuda
class DeepSpeedConfigIntegration(AccelerateTestCase):
def setUp(self):
super().setUp()
self._test_file_path = inspect.getfile(self.__class__)
path = Path(self._test_file_path).resolve()
self.test_file_dir_str = str(path.parents[0])
self.ds_config_file = dict(
zero2=f"{self.test_file_dir_str}/ds_config_zero2.json",
zero3=f"{self.test_file_dir_str}/ds_config_zero3.json",
)
# use self.get_config_dict(stage) to use these to ensure the original is not modified
with io.open(self.ds_config_file[ZERO2], "r", encoding="utf-8") as f:
config_zero2 = json.load(f)
with io.open(self.ds_config_file[ZERO3], "r", encoding="utf-8") as f:
config_zero3 = json.load(f)
# The following setting slows things down, so don't enable it by default unless needed by a test.
# It's in the file as a demo for users since we want everything to work out of the box even if slower.
config_zero3["zero_optimization"]["stage3_gather_16bit_weights_on_model_save"] = False
self.ds_config_dict = dict(zero2=config_zero2, zero3=config_zero3)
self.dist_env = dict(
ACCELERATE_USE_DEEPSPEED="true",
MASTER_ADDR="localhost",
MASTER_PORT="10999",
RANK="0",
LOCAL_RANK="0",
WORLD_SIZE="1",
)
def get_config_dict(self, stage):
# As some tests modify the dict, always make a copy
return deepcopy(self.ds_config_dict[stage])
@parameterized.expand(stages, name_func=parameterized_custom_name_func)
def test_deepspeed_plugin(self, stage):
# Test zero3_init_flag will be set to False when ZeRO stage != 3
deepspeed_plugin = DeepSpeedPlugin(
gradient_accumulation_steps=1,
gradient_clipping=1.0,
zero_stage=2,
offload_optimizer_device="cpu",
offload_param_device="cpu",
zero3_save_16bit_model=True,
zero3_init_flag=True,
)
self.assertFalse(deepspeed_plugin.zero3_init_flag)
deepspeed_plugin.deepspeed_config = None
# Test zero3_init_flag will be set to True only when ZeRO stage == 3
deepspeed_plugin = DeepSpeedPlugin(
gradient_accumulation_steps=1,
gradient_clipping=1.0,
zero_stage=3,
offload_optimizer_device="cpu",
offload_param_device="cpu",
zero3_save_16bit_model=True,
zero3_init_flag=True,
)
self.assertTrue(deepspeed_plugin.zero3_init_flag)
deepspeed_plugin.deepspeed_config = None
# Test config files are loaded correctly
deepspeed_plugin = DeepSpeedPlugin(hf_ds_config=self.ds_config_file[stage], zero3_init_flag=True)
if stage == ZERO2:
self.assertFalse(deepspeed_plugin.zero3_init_flag)
elif stage == ZERO3:
self.assertTrue(deepspeed_plugin.zero3_init_flag)
# Test `gradient_accumulation_steps` is set to 1 if unavailable in config file
with tempfile.TemporaryDirectory() as dirpath:
ds_config = self.get_config_dict(stage)
del ds_config["gradient_accumulation_steps"]
with open(os.path.join(dirpath, "ds_config.json"), "w") as out_file:
json.dump(ds_config, out_file)
deepspeed_plugin = DeepSpeedPlugin(hf_ds_config=os.path.join(dirpath, "ds_config.json"))
self.assertEqual(deepspeed_plugin.deepspeed_config["gradient_accumulation_steps"], 1)
deepspeed_plugin.deepspeed_config = None
# Test `ValueError` is raised if `zero_optimization` is unavailable in config file
with tempfile.TemporaryDirectory() as dirpath:
ds_config = self.get_config_dict(stage)
del ds_config["zero_optimization"]
with open(os.path.join(dirpath, "ds_config.json"), "w") as out_file:
json.dump(ds_config, out_file)
with self.assertRaises(ValueError) as cm:
deepspeed_plugin = DeepSpeedPlugin(hf_ds_config=os.path.join(dirpath, "ds_config.json"))
self.assertTrue(
"Please specify the ZeRO optimization config in the DeepSpeed config." in str(cm.exception)
)
deepspeed_plugin.deepspeed_config = None
# Test `deepspeed_config_process`
deepspeed_plugin = DeepSpeedPlugin(hf_ds_config=self.ds_config_file[stage])
kwargs = {
"fp16.enabled": True,
"bf16.enabled": False,
"optimizer.params.lr": 5e-5,
"optimizer.params.weight_decay": 0.0,
"scheduler.params.warmup_min_lr": 0.0,
"scheduler.params.warmup_max_lr": 5e-5,
"scheduler.params.warmup_num_steps": 0,
"train_micro_batch_size_per_gpu": 16,
"gradient_clipping": 1.0,
"train_batch_size": 16,
"zero_optimization.reduce_bucket_size": 5e5,
"zero_optimization.stage3_prefetch_bucket_size": 5e5,
"zero_optimization.stage3_param_persistence_threshold": 5e5,
"zero_optimization.stage3_gather_16bit_weights_on_model_save": False,
}
deepspeed_plugin.deepspeed_config_process(**kwargs)
for ds_key_long, value in kwargs.items():
config, ds_key = deepspeed_plugin.hf_ds_config.find_config_node(ds_key_long)
if config.get(ds_key) is not None:
self.assertEqual(config.get(ds_key), value)
# Test mismatches
mismatches = {
"optimizer.params.lr": 1e-5,
"optimizer.params.weight_decay": 1e-5,
"gradient_accumulation_steps": 2,
}
with self.assertRaises(ValueError) as cm:
new_kwargs = deepcopy(kwargs)
new_kwargs.update(mismatches)
deepspeed_plugin.deepspeed_config_process(**new_kwargs)
for key in mismatches.keys():
self.assertTrue(
key in str(cm.exception),
f"{key} is not in the exception message:\n{cm.exception}",
)
# Test `ValueError` is raised if some config file fields with `auto` value is missing in `kwargs`
deepspeed_plugin.deepspeed_config["optimizer"]["params"]["lr"] = "auto"
with self.assertRaises(ValueError) as cm:
del kwargs["optimizer.params.lr"]
deepspeed_plugin.deepspeed_config_process(**kwargs)
self.assertTrue("`optimizer.params.lr` not found in kwargs." in str(cm.exception))
@parameterized.expand([FP16, BF16], name_func=parameterized_custom_name_func)
def test_accelerate_state_deepspeed(self, dtype):
AcceleratorState._reset_state(True)
deepspeed_plugin = DeepSpeedPlugin(
gradient_accumulation_steps=1,
gradient_clipping=1.0,
zero_stage=ZERO2,
offload_optimizer_device="cpu",
offload_param_device="cpu",
zero3_save_16bit_model=True,
zero3_init_flag=True,
)
with mockenv_context(**self.dist_env):
state = Accelerator(mixed_precision=dtype, deepspeed_plugin=deepspeed_plugin).state
self.assertTrue(state.deepspeed_plugin.deepspeed_config[dtype]["enabled"])
def test_init_zero3(self):
deepspeed_plugin = DeepSpeedPlugin(
gradient_accumulation_steps=1,
gradient_clipping=1.0,
zero_stage=3,
offload_optimizer_device="cpu",
offload_param_device="cpu",
zero3_save_16bit_model=True,
zero3_init_flag=True,
)
with mockenv_context(**self.dist_env):
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin) # noqa: F841
from transformers.deepspeed import is_deepspeed_zero3_enabled
self.assertTrue(is_deepspeed_zero3_enabled())
@parameterized.expand(optim_scheduler_params, name_func=parameterized_custom_name_func)
def test_prepare_deepspeed(self, optim_type, scheduler_type):
# 1. Testing with one of the ZeRO Stages is enough to test the `_prepare_deepspeed` function.
# Here we test using ZeRO Stage 2 with FP16 enabled.
from deepspeed.runtime.engine import DeepSpeedEngine
kwargs = {
"optimizer.params.lr": 5e-5,
"optimizer.params.weight_decay": 0.0,
"scheduler.params.warmup_min_lr": 0.0,
"scheduler.params.warmup_max_lr": 5e-5,
"scheduler.params.warmup_num_steps": 0,
"train_micro_batch_size_per_gpu": 16,
"gradient_clipping": 1.0,
"train_batch_size": 16,
"zero_optimization.reduce_bucket_size": 5e5,
"zero_optimization.stage3_prefetch_bucket_size": 5e5,
"zero_optimization.stage3_param_persistence_threshold": 5e5,
"zero_optimization.stage3_gather_16bit_weights_on_model_save": False,
}
if optim_type == CUSTOM_OPTIMIZER and scheduler_type == CUSTOM_SCHEDULER:
# Test custom optimizer + custom scheduler
deepspeed_plugin = DeepSpeedPlugin(
gradient_accumulation_steps=1,
gradient_clipping=1.0,
zero_stage=2,
offload_optimizer_device="cpu",
offload_param_device="cpu",
zero3_save_16bit_model=False,
zero3_init_flag=False,
)
with mockenv_context(**self.dist_env):
accelerator = Accelerator(mixed_precision="fp16", deepspeed_plugin=deepspeed_plugin)
train_set = RegressionDataset(length=80)
eval_set = RegressionDataset(length=20)
train_dataloader = DataLoader(train_set, batch_size=16, shuffle=True)
eval_dataloader = DataLoader(eval_set, batch_size=32, shuffle=False)
model = AutoModel.from_pretrained(GPT2_TINY)
optimizer = torch.optim.AdamW(model.parameters(), lr=5e-5)
lr_scheduler = get_scheduler(
name="linear",
optimizer=optimizer,
num_warmup_steps=0,
num_training_steps=1000,
)
dummy_optimizer = DummyOptim(params=model.parameters())
dummy_lr_scheduler = DummyScheduler(dummy_optimizer)
with self.assertRaises(ValueError) as cm:
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, dummy_optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
self.assertTrue(
"You cannot create a `DummyOptim` without specifying an optimizer in the config file."
in str(cm.exception)
)
with self.assertRaises(ValueError) as cm:
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, dummy_lr_scheduler
)
self.assertTrue(
"You cannot create a `DummyScheduler` without specifying a scheduler in the config file."
in str(cm.exception)
)
with self.assertRaises(ValueError) as cm:
model, optimizer, lr_scheduler = accelerator.prepare(model, optimizer, lr_scheduler)
self.assertTrue(
"When using DeepSpeed `accelerate.prepare()` requires you to pass at least one of training or evaluation dataloaders "
"or alternatively set an integer value in `train_micro_batch_size_per_gpu` in the deepspeed config file"
"or assign integer value to `AcceleratorState().deepspeed_plugin.deepspeed_config['train_micro_batch_size_per_gpu']`."
in str(cm.exception)
)
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
self.assertTrue(accelerator.deepspeed_config["zero_allow_untested_optimizer"])
self.assertTrue(accelerator.deepspeed_config["train_batch_size"], 16)
self.assertEqual(type(model), DeepSpeedEngine)
self.assertEqual(type(optimizer), DeepSpeedOptimizerWrapper)
self.assertEqual(type(lr_scheduler), AcceleratedScheduler)
self.assertEqual(type(accelerator.deepspeed_engine_wrapped), DeepSpeedEngineWrapper)
elif optim_type == DS_OPTIMIZER and scheduler_type == DS_SCHEDULER:
# Test DeepSpeed optimizer + DeepSpeed scheduler
deepspeed_plugin = DeepSpeedPlugin(hf_ds_config=self.ds_config_file[ZERO2])
with mockenv_context(**self.dist_env):
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin, mixed_precision="fp16")
train_set = RegressionDataset(length=80)
eval_set = RegressionDataset(length=20)
train_dataloader = DataLoader(train_set, batch_size=10, shuffle=True)
eval_dataloader = DataLoader(eval_set, batch_size=5, shuffle=False)
model = AutoModel.from_pretrained(GPT2_TINY)
optimizer = torch.optim.AdamW(model.parameters(), lr=5e-5)
lr_scheduler = get_scheduler(
name="linear",
optimizer=optimizer,
num_warmup_steps=0,
num_training_steps=1000,
)
dummy_optimizer = DummyOptim(params=model.parameters())
dummy_lr_scheduler = DummyScheduler(dummy_optimizer)
kwargs["train_batch_size"] = (
kwargs["train_micro_batch_size_per_gpu"]
* deepspeed_plugin.deepspeed_config["gradient_accumulation_steps"]
* accelerator.num_processes
)
accelerator.state.deepspeed_plugin.deepspeed_config_process(**kwargs)
with self.assertRaises(ValueError) as cm:
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, dummy_lr_scheduler
)
self.assertTrue(
"You cannot specify an optimizer in the config file and in the code at the same time"
in str(cm.exception)
)
with self.assertRaises(ValueError) as cm:
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, dummy_optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
self.assertTrue(
"You cannot specify a scheduler in the config file and in the code at the same time"
in str(cm.exception)
)
with self.assertRaises(ValueError) as cm:
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, dummy_optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
self.assertTrue(
"You cannot specify a scheduler in the config file and in the code at the same time"
in str(cm.exception)
)
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, dummy_optimizer, train_dataloader, eval_dataloader, dummy_lr_scheduler
)
self.assertTrue(type(model) == DeepSpeedEngine)
self.assertTrue(type(optimizer) == DeepSpeedOptimizerWrapper)
self.assertTrue(type(lr_scheduler) == DeepSpeedSchedulerWrapper)
self.assertTrue(type(accelerator.deepspeed_engine_wrapped) == DeepSpeedEngineWrapper)
elif optim_type == CUSTOM_OPTIMIZER and scheduler_type == DS_SCHEDULER:
# Test custom optimizer + DeepSpeed scheduler
deepspeed_plugin = DeepSpeedPlugin(hf_ds_config=self.ds_config_file[ZERO2])
with mockenv_context(**self.dist_env):
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin, mixed_precision="fp16")
train_set = RegressionDataset(length=80)
eval_set = RegressionDataset(length=20)
train_dataloader = DataLoader(train_set, batch_size=10, shuffle=True)
eval_dataloader = DataLoader(eval_set, batch_size=5, shuffle=False)
model = AutoModel.from_pretrained(GPT2_TINY)
optimizer = torch.optim.AdamW(model.parameters(), lr=5e-5)
lr_scheduler = get_scheduler(
name="linear",
optimizer=optimizer,
num_warmup_steps=0,
num_training_steps=1000,
)
dummy_optimizer = DummyOptim(params=model.parameters())
dummy_lr_scheduler = DummyScheduler(dummy_optimizer)
kwargs["train_batch_size"] = (
kwargs["train_micro_batch_size_per_gpu"]
* deepspeed_plugin.deepspeed_config["gradient_accumulation_steps"]
* accelerator.num_processes
)
accelerator.state.deepspeed_plugin.deepspeed_config_process(**kwargs)
del accelerator.state.deepspeed_plugin.deepspeed_config["optimizer"]
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, dummy_lr_scheduler
)
self.assertTrue(type(model) == DeepSpeedEngine)
self.assertTrue(type(optimizer) == DeepSpeedOptimizerWrapper)
self.assertTrue(type(lr_scheduler) == DeepSpeedSchedulerWrapper)
self.assertTrue(type(accelerator.deepspeed_engine_wrapped) == DeepSpeedEngineWrapper)
elif optim_type == DS_OPTIMIZER and scheduler_type == CUSTOM_SCHEDULER:
# Test deepspeed optimizer + custom scheduler
deepspeed_plugin = DeepSpeedPlugin(hf_ds_config=self.ds_config_file[ZERO2])
with mockenv_context(**self.dist_env):
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin, mixed_precision="fp16")
train_set = RegressionDataset(length=80)
eval_set = RegressionDataset(length=20)
train_dataloader = DataLoader(train_set, batch_size=10, shuffle=True)
eval_dataloader = DataLoader(eval_set, batch_size=5, shuffle=False)
model = AutoModel.from_pretrained(GPT2_TINY)
optimizer = torch.optim.AdamW(model.parameters(), lr=5e-5)
lr_scheduler = get_scheduler(
name="linear",
optimizer=optimizer,
num_warmup_steps=0,
num_training_steps=1000,
)
dummy_optimizer = DummyOptim(params=model.parameters())
dummy_lr_scheduler = DummyScheduler(dummy_optimizer)
kwargs["train_batch_size"] = (
kwargs["train_micro_batch_size_per_gpu"]
* deepspeed_plugin.deepspeed_config["gradient_accumulation_steps"]
* accelerator.num_processes
)
accelerator.state.deepspeed_plugin.deepspeed_config_process(**kwargs)
del accelerator.state.deepspeed_plugin.deepspeed_config["scheduler"]
with self.assertRaises(ValueError) as cm:
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, dummy_optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
self.assertTrue(
"You can only specify `accelerate.utils.DummyScheduler` in the code when using `accelerate.utils.DummyOptim`."
in str(cm.exception)
)
def test_save_checkpoints(self):
deepspeed_plugin = DeepSpeedPlugin(
hf_ds_config=self.ds_config_file[ZERO3],
zero3_init_flag=True,
)
del deepspeed_plugin.deepspeed_config["bf16"]
kwargs = {
"optimizer.params.lr": 5e-5,
"optimizer.params.weight_decay": 0.0,
"scheduler.params.warmup_min_lr": 0.0,
"scheduler.params.warmup_max_lr": 5e-5,
"scheduler.params.warmup_num_steps": 0,
"train_micro_batch_size_per_gpu": 16,
"gradient_clipping": 1.0,
"train_batch_size": 16,
"zero_optimization.reduce_bucket_size": 5e5,
"zero_optimization.stage3_prefetch_bucket_size": 5e5,
"zero_optimization.stage3_param_persistence_threshold": 5e5,
"zero_optimization.stage3_gather_16bit_weights_on_model_save": False,
}
with mockenv_context(**self.dist_env):
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin, mixed_precision="fp16")
kwargs["train_batch_size"] = (
kwargs["train_micro_batch_size_per_gpu"]
* deepspeed_plugin.deepspeed_config["gradient_accumulation_steps"]
* accelerator.num_processes
)
accelerator.state.deepspeed_plugin.deepspeed_config_process(**kwargs)
train_set = RegressionDataset(length=80)
eval_set = RegressionDataset(length=20)
train_dataloader = DataLoader(train_set, batch_size=16, shuffle=True)
eval_dataloader = DataLoader(eval_set, batch_size=32, shuffle=False)
model = AutoModelForCausalLM.from_pretrained("gpt2")
dummy_optimizer = DummyOptim(params=model.parameters())
dummy_lr_scheduler = DummyScheduler(dummy_optimizer)
model, _, train_dataloader, eval_dataloader, _ = accelerator.prepare(
model, dummy_optimizer, train_dataloader, eval_dataloader, dummy_lr_scheduler
)
with self.assertRaises(ValueError) as cm:
accelerator.get_state_dict(model)
msg = (
"Cannot get 16bit model weights because `stage3_gather_16bit_weights_on_model_save` in DeepSpeed config is False. "
"To save the model weights in 16bit, set `stage3_gather_16bit_weights_on_model_save` to True in DeepSpeed config file or "
"set `zero3_save_16bit_model` to True when using `accelerate config`. "
"To save the full checkpoint, run `model.save_checkpoint(save_dir)` and use `zero_to_fp32.py` to recover weights."
)
self.assertTrue(msg in str(cm.exception))
def test_autofill_dsconfig(self):
deepspeed_plugin = DeepSpeedPlugin(
hf_ds_config=self.ds_config_file[ZERO3],
zero3_init_flag=True,
)
del deepspeed_plugin.deepspeed_config["bf16"]
del deepspeed_plugin.deepspeed_config["fp16"]
with mockenv_context(**self.dist_env):
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin)
train_set = RegressionDataset(length=80)
eval_set = RegressionDataset(length=20)
train_dataloader = DataLoader(train_set, batch_size=16, shuffle=True)
eval_dataloader = DataLoader(eval_set, batch_size=32, shuffle=False)
model = AutoModelForCausalLM.from_pretrained("gpt2")
dummy_optimizer = DummyOptim(params=model.parameters(), lr=5e-5, weight_decay=1e-4)
dummy_lr_scheduler = DummyScheduler(dummy_optimizer, warmup_num_steps=10, total_num_steps=1000)
hidden_size = model.config.hidden_size
model, _, train_dataloader, eval_dataloader, _ = accelerator.prepare(
model, dummy_optimizer, train_dataloader, eval_dataloader, dummy_lr_scheduler
)
self.assertEqual(accelerator.deepspeed_config["train_micro_batch_size_per_gpu"], 16)
self.assertEqual(accelerator.deepspeed_config["train_batch_size"], 16)
self.assertEqual(accelerator.deepspeed_config["optimizer"]["params"]["lr"], 5e-5)
self.assertEqual(accelerator.deepspeed_config["optimizer"]["params"]["weight_decay"], 1e-4)
self.assertEqual(accelerator.deepspeed_config["scheduler"]["params"]["warmup_min_lr"], 0.0)
self.assertEqual(accelerator.deepspeed_config["scheduler"]["params"]["warmup_max_lr"], 5e-5)
self.assertEqual(accelerator.deepspeed_config["scheduler"]["params"]["warmup_num_steps"], 10)
self.assertEqual(accelerator.deepspeed_config["gradient_clipping"], 1.0)
self.assertEqual(
accelerator.deepspeed_config["zero_optimization"]["reduce_bucket_size"], hidden_size * hidden_size
)
self.assertEqual(
accelerator.deepspeed_config["zero_optimization"]["stage3_prefetch_bucket_size"],
0.9 * hidden_size * hidden_size,
)
self.assertEqual(
accelerator.deepspeed_config["zero_optimization"]["stage3_param_persistence_threshold"],
10 * hidden_size,
)
self.assertFalse(
accelerator.deepspeed_config["zero_optimization"]["stage3_gather_16bit_weights_on_model_save"]
)
@parameterized.expand([FP16, BF16], name_func=parameterized_custom_name_func)
def test_autofill_dsconfig_from_ds_plugin(self, dtype):
ds_config = self.ds_config_dict["zero3"]
if dtype == BF16:
del ds_config["fp16"]
else:
del ds_config["bf16"]
ds_config[dtype]["enabled"] = "auto"
ds_config["zero_optimization"]["stage"] = "auto"
ds_config["zero_optimization"]["stage3_gather_16bit_weights_on_model_save"] = "auto"
ds_config["zero_optimization"]["offload_optimizer"]["device"] = "auto"
ds_config["zero_optimization"]["offload_param"]["device"] = "auto"
ds_config["gradient_accumulation_steps"] = "auto"
ds_config["gradient_clipping"] = "auto"
deepspeed_plugin = DeepSpeedPlugin(
hf_ds_config=ds_config,
zero3_init_flag=True,
gradient_accumulation_steps=1,
gradient_clipping=1.0,
zero_stage=2,
offload_optimizer_device="cpu",
offload_param_device="cpu",
zero3_save_16bit_model=True,
)
with mockenv_context(**self.dist_env):
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin, mixed_precision=dtype)
deepspeed_plugin = accelerator.state.deepspeed_plugin
self.assertEqual(deepspeed_plugin.deepspeed_config["gradient_clipping"], 1.0)
self.assertEqual(deepspeed_plugin.deepspeed_config["gradient_accumulation_steps"], 1)
self.assertEqual(deepspeed_plugin.deepspeed_config["zero_optimization"]["stage"], 2)
self.assertEqual(
deepspeed_plugin.deepspeed_config["zero_optimization"]["offload_optimizer"]["device"], "cpu"
)
self.assertEqual(deepspeed_plugin.deepspeed_config["zero_optimization"]["offload_param"]["device"], "cpu")
self.assertTrue(
deepspeed_plugin.deepspeed_config["zero_optimization"]["stage3_gather_16bit_weights_on_model_save"]
)
self.assertTrue(deepspeed_plugin.deepspeed_config[dtype]["enabled"])
AcceleratorState._reset_state(True)
diff_dtype = "bf16" if dtype == "fp16" else "fp16"
with mockenv_context(**self.dist_env):
with self.assertRaises(ValueError) as cm:
accelerator = Accelerator(deepspeed_plugin=deepspeed_plugin, mixed_precision=diff_dtype)
self.assertTrue(
f"`--mixed_precision` arg cannot be set to `{diff_dtype}` when `{dtype}` is set in the DeepSpeed config file."
in str(cm.exception)
)
def test_ds_config_assertions(self):
ambiguous_env = self.dist_env.copy()
ambiguous_env[
"ACCELERATE_CONFIG_DS_FIELDS"
] = "gradient_accumulation_steps,gradient_clipping,zero_stage,offload_optimizer_device,offload_param_device,zero3_save_16bit_model,mixed_precision"
with mockenv_context(**ambiguous_env):
with self.assertRaises(ValueError) as cm:
deepspeed_plugin = DeepSpeedPlugin(
hf_ds_config=self.ds_config_file[ZERO3],
zero3_init_flag=True,
gradient_accumulation_steps=1,
gradient_clipping=1.0,
zero_stage=ZERO2,
offload_optimizer_device="cpu",
offload_param_device="cpu",
zero3_save_16bit_model=True,
)
_ = Accelerator(deepspeed_plugin=deepspeed_plugin, mixed_precision=FP16)
self.assertTrue(
"If you are using an accelerate config file, remove others config variables mentioned in the above specified list."
in str(cm.exception)
)
@parameterized.expand(stages, name_func=parameterized_custom_name_func)
def test_ds_config(self, stage):
deepspeed_plugin = DeepSpeedPlugin(
hf_ds_config=self.ds_config_file[stage],
zero3_init_flag=True,
)
self.assertEqual(deepspeed_plugin.zero_stage, int(stage.replace("zero", "")))
def test_basic_run(self):
mod_file = inspect.getfile(accelerate.test_utils)
test_file_path = os.path.sep.join(
mod_file.split(os.path.sep)[:-1] + ["scripts", "external_deps", "test_performance.py"]
)
with tempfile.TemporaryDirectory() as dirpath:
cmd = [
"accelerate",
"launch",
"--num_processes=1",
"--num_machines=1",
"--machine_rank=0",
"--mixed_precision=fp16",
"--use_deepspeed",
"--gradient_accumulation_steps=1",
"--zero_stage=2",
"--offload_optimizer_device=none",
"--offload_param_device=none",
test_file_path,
"--model_name_or_path=distilbert-base-uncased",
"--num_epochs=1",
f"--output_dir={dirpath}",
]
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd, env=os.environ.copy())
@require_deepspeed
@require_multi_gpu
@slow
class DeepSpeedIntegrationTest(TempDirTestCase):
def setUp(self):
super().setUp()
self._test_file_path = inspect.getfile(self.__class__)
path = Path(self._test_file_path).resolve()
self.test_file_dir_str = str(path.parents[0])
self.ds_config_file = dict(
zero2=f"{self.test_file_dir_str}/ds_config_zero2.json",
zero3=f"{self.test_file_dir_str}/ds_config_zero3.json",
)
self.stages = [1, 2, 3]
self.zero3_offload_config = False
self.performance_lower_bound = 0.82
self.peak_memory_usage_upper_bound = {
"multi_gpu_fp16": 3200,
"deepspeed_stage_1_fp16": 1600,
"deepspeed_stage_2_fp16": 2500,
"deepspeed_stage_3_zero_init_fp16": 2800,
# Disabling below test as it overwhelms the RAM memory usage
# on CI self-hosted runner leading to tests getting killed.
# "deepspeed_stage_3_cpu_offload_fp16": 1900,
}
self.n_train = 160
self.n_val = 160
mod_file = inspect.getfile(accelerate.test_utils)
self.test_scripts_folder = os.path.sep.join(mod_file.split(os.path.sep)[:-1] + ["scripts", "external_deps"])
def test_performance(self):
self.test_file_path = os.path.join(self.test_scripts_folder, "test_performance.py")
cmd = [
"accelerate",
"launch",
"--num_processes=2",
"--num_machines=1",
"--machine_rank=0",
"--mixed_precision=fp16",
"--use_deepspeed",
"--gradient_accumulation_steps=1",
"--gradient_clipping=1",
"--zero3_init_flag=True",
"--zero3_save_16bit_model=True",
]
for stage in self.stages:
if stage == 1:
continue
cmd_stage = cmd.copy()
cmd_stage.extend([f"--zero_stage={stage}"])
cmd_stage.extend(["--offload_optimizer_device=none", "--offload_param_device=none"])
if self.zero3_offload_config:
with io.open(self.ds_config_file[ZERO3], "r", encoding="utf-8") as f:
ds_config = json.load(f)
del ds_config["bf16"]
del ds_config["optimizer"]["params"]["torch_adam"]
del ds_config["optimizer"]["params"]["adam_w_mode"]
ds_config["fp16"]["enabled"] = True
ds_config_path = os.path.join(self.tmpdir, "ds_config.json")
with open(ds_config_path, "w") as out_file:
json.dump(ds_config, out_file)
cmd_stage.extend([f"--deepspeed_config_file={ds_config_path}"])
cmd_stage.extend(
[
self.test_file_path,
f"--output_dir={self.tmpdir}",
f"--performance_lower_bound={self.performance_lower_bound}",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_stage, env=os.environ.copy())
def test_checkpointing(self):
self.test_file_path = os.path.join(self.test_scripts_folder, "test_checkpointing.py")
cmd = [
"accelerate",
"launch",
"--num_processes=2",
"--num_machines=1",
"--machine_rank=0",
"--mixed_precision=fp16",
"--use_deepspeed",
"--gradient_accumulation_steps=1",
"--gradient_clipping=1",
"--zero3_init_flag=True",
"--zero3_save_16bit_model=True",
]
for stage in self.stages:
if stage == 1:
continue
cmd_stage = cmd.copy()
cmd_stage.extend([f"--zero_stage={stage}"])
cmd_stage.extend(["--offload_optimizer_device=none", "--offload_param_device=none"])
if self.zero3_offload_config:
with io.open(self.ds_config_file[ZERO3], "r", encoding="utf-8") as f:
ds_config = json.load(f)
del ds_config["bf16"]
del ds_config["optimizer"]["params"]["torch_adam"]
del ds_config["optimizer"]["params"]["adam_w_mode"]
ds_config["fp16"]["enabled"] = True
ds_config_path = os.path.join(self.tmpdir, "ds_config.json")
with open(ds_config_path, "w") as out_file:
json.dump(ds_config, out_file)
cmd_stage.extend([f"--deepspeed_config_file={ds_config_path}"])
cmd_stage.extend(
[
self.test_file_path,
f"--output_dir={self.tmpdir}",
"--partial_train_epoch=1",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_stage, env=os.environ.copy())
cmd_stage = cmd_stage[:-1]
resume_from_checkpoint = os.path.join(self.tmpdir, "epoch_0")
cmd_stage.extend(
[
f"--resume_from_checkpoint={resume_from_checkpoint}",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_stage, env=os.environ.copy())
def test_peak_memory_usage(self):
self.test_file_path = os.path.join(self.test_scripts_folder, "test_peak_memory_usage.py")
cmd = [
"accelerate",
"launch",
"--num_processes=2",
"--num_machines=1",
"--machine_rank=0",
]
for spec, peak_mem_upper_bound in self.peak_memory_usage_upper_bound.items():
cmd_stage = cmd.copy()
if "fp16" in spec:
cmd_stage.extend(["--mixed_precision=fp16"])
if "multi_gpu" in spec:
continue
else:
cmd_stage.extend(
[
"--use_deepspeed",
"--gradient_accumulation_steps=1",
"--gradient_clipping=1",
"--zero3_init_flag=True",
"--zero3_save_16bit_model=True",
]
)
for i in range(3):
if f"stage_{i+1}" in spec:
cmd_stage.extend([f"--zero_stage={i+1}"])
break
cmd_stage.extend(
[
"--offload_optimizer_device=none",
"--offload_param_device=none",
"--offload_optimizer_nvme_path=none",
"--offload_param_nvme_path=none",
]
)
if "cpu_offload" in spec:
with io.open(self.ds_config_file[ZERO3], "r", encoding="utf-8") as f:
ds_config = json.load(f)
del ds_config["bf16"]
del ds_config["fp16"]
del ds_config["optimizer"]["params"]["torch_adam"]
del ds_config["optimizer"]["params"]["adam_w_mode"]
ds_config_path = os.path.join(self.tmpdir, "ds_config.json")
with open(ds_config_path, "w") as out_file:
json.dump(ds_config, out_file)
cmd_stage.extend([f"--deepspeed_config_file={ds_config_path}"])
cmd_stage.extend(
[
self.test_file_path,
f"--output_dir={self.tmpdir}",
f"--peak_memory_upper_bound={peak_mem_upper_bound}",
f"--n_train={self.n_train}",
f"--n_val={self.n_val}",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_stage, env=os.environ.copy())
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/deepspeed/ds_config_zero3.json
|
{
"fp16": {
"enabled": "auto",
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"bf16": {
"enabled": "auto"
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto",
"torch_adam": true,
"adam_w_mode": true
}
},
"scheduler": {
"type": "WarmupLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 3,
"offload_optimizer": {
"device": "cpu",
"pin_memory": true
},
"offload_param": {
"device": "cpu",
"pin_memory": true
},
"overlap_comm": true,
"contiguous_gradients": true,
"sub_group_size": 1e9,
"reduce_bucket_size": "auto",
"stage3_prefetch_bucket_size": "auto",
"stage3_param_persistence_threshold": "auto",
"stage3_max_live_parameters": 1e9,
"stage3_max_reuse_distance": 1e9,
"stage3_gather_16bit_weights_on_model_save": "auto"
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/test_samples/test_command_file.sh
|
echo "hello world"
echo "this is a second command"
| 0 |
hf_public_repos/accelerate/tests/test_samples
|
hf_public_repos/accelerate/tests/test_samples/MRPC/dev.csv
|
label,sentence1,sentence2
equivalent,He said the foodservice pie business doesn 't fit the company 's long-term growth strategy .,""" The foodservice pie business does not fit our long-term growth strategy ."
not_equivalent,Magnarelli said Racicot hated the Iraqi regime and looked forward to using his long years of training in the war .,"His wife said he was "" 100 percent behind George Bush "" and looked forward to using his years of training in the war ."
not_equivalent,"The dollar was at 116.92 yen against the yen , flat on the session , and at 1.2891 against the Swiss franc , also flat .","The dollar was at 116.78 yen JPY = , virtually flat on the session , and at 1.2871 against the Swiss franc CHF = , down 0.1 percent ."
equivalent,The AFL-CIO is waiting until October to decide if it will endorse a candidate .,The AFL-CIO announced Wednesday that it will decide in October whether to endorse a candidate before the primaries .
not_equivalent,No dates have been set for the civil or the criminal trial .,"No dates have been set for the criminal or civil cases , but Shanley has pleaded not guilty ."
equivalent,Wal-Mart said it would check all of its million-plus domestic workers to ensure they were legally employed .,It has also said it would review all of its domestic employees more than 1 million to ensure they have legal status .
| 0 |
hf_public_repos/accelerate/tests/test_samples
|
hf_public_repos/accelerate/tests/test_samples/MRPC/train.csv
|
label,sentence1,sentence2
equivalent,He said the foodservice pie business doesn 't fit the company 's long-term growth strategy .,""" The foodservice pie business does not fit our long-term growth strategy ."
not_equivalent,Magnarelli said Racicot hated the Iraqi regime and looked forward to using his long years of training in the war .,"His wife said he was "" 100 percent behind George Bush "" and looked forward to using his years of training in the war ."
not_equivalent,"The dollar was at 116.92 yen against the yen , flat on the session , and at 1.2891 against the Swiss franc , also flat .","The dollar was at 116.78 yen JPY = , virtually flat on the session , and at 1.2871 against the Swiss franc CHF = , down 0.1 percent ."
equivalent,The AFL-CIO is waiting until October to decide if it will endorse a candidate .,The AFL-CIO announced Wednesday that it will decide in October whether to endorse a candidate before the primaries .
not_equivalent,No dates have been set for the civil or the criminal trial .,"No dates have been set for the criminal or civil cases , but Shanley has pleaded not guilty ."
equivalent,Wal-Mart said it would check all of its million-plus domestic workers to ensure they were legally employed .,It has also said it would review all of its domestic employees more than 1 million to ensure they have legal status .
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/fsdp/test_fsdp.py
|
# Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
import os
import torch
from transformers import AutoModel
from transformers.testing_utils import mockenv_context
from transformers.trainer_utils import set_seed
import accelerate
from accelerate.accelerator import Accelerator
from accelerate.state import AcceleratorState
from accelerate.test_utils.testing import (
AccelerateTestCase,
TempDirTestCase,
execute_subprocess_async,
require_cuda,
require_fsdp,
require_multi_gpu,
slow,
)
from accelerate.utils.constants import (
FSDP_AUTO_WRAP_POLICY,
FSDP_BACKWARD_PREFETCH,
FSDP_SHARDING_STRATEGY,
FSDP_STATE_DICT_TYPE,
)
from accelerate.utils.dataclasses import FullyShardedDataParallelPlugin
from accelerate.utils.other import patch_environment
set_seed(42)
BERT_BASE_CASED = "bert-base-cased"
FP16 = "fp16"
BF16 = "bf16"
dtypes = [FP16, BF16]
@require_fsdp
@require_cuda
class FSDPPluginIntegration(AccelerateTestCase):
def setUp(self):
super().setUp()
self.dist_env = dict(
ACCELERATE_USE_FSDP="true",
MASTER_ADDR="localhost",
MASTER_PORT="10999",
RANK="0",
LOCAL_RANK="0",
WORLD_SIZE="1",
)
def test_sharding_strategy(self):
from torch.distributed.fsdp.fully_sharded_data_parallel import ShardingStrategy
for i, strategy in enumerate(FSDP_SHARDING_STRATEGY):
env = self.dist_env.copy()
env["FSDP_SHARDING_STRATEGY"] = f"{i + 1}"
env["FSDP_SHARDING_STRATEGY_NAME"] = strategy
with mockenv_context(**env):
fsdp_plugin = FullyShardedDataParallelPlugin()
self.assertEqual(fsdp_plugin.sharding_strategy, ShardingStrategy(i + 1))
def test_backward_prefetch(self):
from torch.distributed.fsdp.fully_sharded_data_parallel import BackwardPrefetch
for i, prefetch_policy in enumerate(FSDP_BACKWARD_PREFETCH):
env = self.dist_env.copy()
env["FSDP_BACKWARD_PREFETCH"] = prefetch_policy
with mockenv_context(**env):
fsdp_plugin = FullyShardedDataParallelPlugin()
if prefetch_policy == "NO_PREFETCH":
self.assertIsNone(fsdp_plugin.backward_prefetch)
else:
self.assertEqual(fsdp_plugin.backward_prefetch, BackwardPrefetch(i + 1))
def test_state_dict_type(self):
from torch.distributed.fsdp.fully_sharded_data_parallel import StateDictType
for i, state_dict_type in enumerate(FSDP_STATE_DICT_TYPE):
env = self.dist_env.copy()
env["FSDP_STATE_DICT_TYPE"] = state_dict_type
with mockenv_context(**env):
fsdp_plugin = FullyShardedDataParallelPlugin()
self.assertEqual(fsdp_plugin.state_dict_type, StateDictType(i + 1))
if state_dict_type == "FULL_STATE_DICT":
self.assertTrue(fsdp_plugin.state_dict_config.offload_to_cpu)
self.assertTrue(fsdp_plugin.state_dict_config.rank0_only)
def test_auto_wrap_policy(self):
model = AutoModel.from_pretrained(BERT_BASE_CASED)
for policy in FSDP_AUTO_WRAP_POLICY:
env = self.dist_env.copy()
env["FSDP_AUTO_WRAP_POLICY"] = policy
if policy == "TRANSFORMER_BASED_WRAP":
env["FSDP_TRANSFORMER_CLS_TO_WRAP"] = "BertLayer"
elif policy == "SIZE_BASED_WRAP":
env["FSDP_MIN_NUM_PARAMS"] = "2000"
with mockenv_context(**env):
fsdp_plugin = FullyShardedDataParallelPlugin()
fsdp_plugin.set_auto_wrap_policy(model)
if policy == "NO_WRAP":
self.assertIsNone(fsdp_plugin.auto_wrap_policy)
else:
self.assertIsNotNone(fsdp_plugin.auto_wrap_policy)
env = self.dist_env.copy()
env["FSDP_AUTO_WRAP_POLICY"] = "TRANSFORMER_BASED_WRAP"
env["FSDP_TRANSFORMER_CLS_TO_WRAP"] = "T5Layer"
with mockenv_context(**env):
fsdp_plugin = FullyShardedDataParallelPlugin()
with self.assertRaises(Exception) as cm:
fsdp_plugin.set_auto_wrap_policy(model)
self.assertTrue("Could not find the transformer layer class to wrap in the model." in str(cm.exception))
env = self.dist_env.copy()
env["FSDP_AUTO_WRAP_POLICY"] = "SIZE_BASED_WRAP"
env["FSDP_MIN_NUM_PARAMS"] = "0"
with mockenv_context(**env):
fsdp_plugin = FullyShardedDataParallelPlugin()
fsdp_plugin.set_auto_wrap_policy(model)
self.assertIsNone(fsdp_plugin.auto_wrap_policy)
def test_mixed_precision(self):
from torch.distributed.fsdp.fully_sharded_data_parallel import MixedPrecision
from torch.distributed.fsdp.sharded_grad_scaler import ShardedGradScaler
for mp_dtype in dtypes:
env = self.dist_env.copy()
env["ACCELERATE_MIXED_PRECISION"] = mp_dtype
with mockenv_context(**env):
accelerator = Accelerator()
if mp_dtype == "fp16":
dtype = torch.float16
elif mp_dtype == "bf16":
dtype = torch.bfloat16
mp_policy = MixedPrecision(param_dtype=dtype, reduce_dtype=dtype, buffer_dtype=dtype)
self.assertEqual(accelerator.state.fsdp_plugin.mixed_precision_policy, mp_policy)
if mp_dtype == FP16:
self.assertTrue(isinstance(accelerator.scaler, ShardedGradScaler))
elif mp_dtype == BF16:
self.assertIsNone(accelerator.scaler)
AcceleratorState._reset_state(True)
def test_cpu_offload(self):
from torch.distributed.fsdp.fully_sharded_data_parallel import CPUOffload
for flag in [True, False]:
env = self.dist_env.copy()
env["FSDP_OFFLOAD_PARAMS"] = str(flag).lower()
with mockenv_context(**env):
fsdp_plugin = FullyShardedDataParallelPlugin()
self.assertEqual(fsdp_plugin.cpu_offload, CPUOffload(offload_params=flag))
@require_fsdp
@require_multi_gpu
@slow
class FSDPIntegrationTest(TempDirTestCase):
def setUp(self):
super().setUp()
self.performance_lower_bound = 0.82
self.performance_configs = [
"fsdp_shard_grad_op_transformer_based_wrap",
"fsdp_full_shard_transformer_based_wrap",
]
self.peak_memory_usage_upper_bound = {
"multi_gpu_fp16": 3200,
"fsdp_shard_grad_op_transformer_based_wrap_fp16": 2000,
"fsdp_full_shard_transformer_based_wrap_fp16": 1900,
# Disabling below test as it overwhelms the RAM memory usage
# on CI self-hosted runner leading to tests getting killed.
# "fsdp_full_shard_cpu_offload_transformer_based_wrap_fp32": 1500, # fp16 was leading to indefinite hang
}
self.n_train = 160
self.n_val = 160
mod_file = inspect.getfile(accelerate.test_utils)
self.test_scripts_folder = os.path.sep.join(mod_file.split(os.path.sep)[:-1] + ["scripts", "external_deps"])
def test_performance(self):
self.test_file_path = os.path.join(self.test_scripts_folder, "test_performance.py")
cmd = ["accelerate", "launch", "--num_processes=2", "--num_machines=1", "--machine_rank=0", "--use_fsdp"]
for config in self.performance_configs:
cmd_config = cmd.copy()
for i, strategy in enumerate(FSDP_SHARDING_STRATEGY):
if strategy.lower() in config:
cmd_config.append(f"--fsdp_sharding_strategy={i+1}")
break
if "fp32" in config:
cmd_config.append("--mixed_precision=no")
else:
cmd_config.append("--mixed_precision=fp16")
if "cpu_offload" in config:
cmd_config.append("--fsdp_offload_params=True")
for policy in FSDP_AUTO_WRAP_POLICY:
if policy.lower() in config:
cmd_config.append(f"--fsdp_auto_wrap_policy={policy}")
break
if policy == "TRANSFORMER_BASED_WRAP":
cmd_config.append("--fsdp_transformer_layer_cls_to_wrap=BertLayer")
elif policy == "SIZE_BASED_WRAP":
cmd_config.append("--fsdp_min_num_params=2000")
cmd_config.extend(
[
self.test_file_path,
f"--output_dir={self.tmpdir}",
f"--performance_lower_bound={self.performance_lower_bound}",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_config, env=os.environ.copy())
def test_checkpointing(self):
self.test_file_path = os.path.join(self.test_scripts_folder, "test_checkpointing.py")
cmd = [
"accelerate",
"launch",
"--num_processes=2",
"--num_machines=1",
"--machine_rank=0",
"--use_fsdp",
"--mixed_precision=fp16",
"--fsdp_transformer_layer_cls_to_wrap=BertLayer",
]
for i, strategy in enumerate(FSDP_SHARDING_STRATEGY):
cmd_config = cmd.copy()
cmd_config.append(f"--fsdp_sharding_strategy={i+1}")
if strategy != "FULL_SHARD":
continue
state_dict_config_index = len(cmd_config)
for state_dict_type in FSDP_STATE_DICT_TYPE:
cmd_config = cmd_config[:state_dict_config_index]
cmd_config.append(f"--fsdp_state_dict_type={state_dict_type}")
cmd_config.extend(
[
self.test_file_path,
f"--output_dir={self.tmpdir}",
"--partial_train_epoch=1",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_config, env=os.environ.copy())
cmd_config = cmd_config[:-1]
resume_from_checkpoint = os.path.join(self.tmpdir, "epoch_0")
cmd_config.extend(
[
f"--resume_from_checkpoint={resume_from_checkpoint}",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_config, env=os.environ.copy())
def test_peak_memory_usage(self):
self.test_file_path = os.path.join(self.test_scripts_folder, "test_peak_memory_usage.py")
cmd = [
"accelerate",
"launch",
"--num_processes=2",
"--num_machines=1",
"--machine_rank=0",
]
for spec, peak_mem_upper_bound in self.peak_memory_usage_upper_bound.items():
cmd_config = cmd.copy()
if "fp16" in spec:
cmd_config.extend(["--mixed_precision=fp16"])
else:
cmd_config.extend(["--mixed_precision=no"])
if "multi_gpu" in spec:
continue
else:
cmd_config.extend(["--use_fsdp"])
for i, strategy in enumerate(FSDP_SHARDING_STRATEGY):
if strategy.lower() in spec:
cmd_config.append(f"--fsdp_sharding_strategy={i+1}")
break
if "cpu_offload" in spec:
cmd_config.append("--fsdp_offload_params=True")
for policy in FSDP_AUTO_WRAP_POLICY:
if policy.lower() in spec:
cmd_config.append(f"--fsdp_auto_wrap_policy={policy}")
break
if policy == "TRANSFORMER_BASED_WRAP":
cmd_config.append("--fsdp_transformer_layer_cls_to_wrap=BertLayer")
elif policy == "SIZE_BASED_WRAP":
cmd_config.append("--fsdp_min_num_params=2000")
cmd_config.extend(
[
self.test_file_path,
f"--output_dir={self.tmpdir}",
f"--peak_memory_upper_bound={peak_mem_upper_bound}",
f"--n_train={self.n_train}",
f"--n_val={self.n_val}",
]
)
with patch_environment(omp_num_threads=1):
execute_subprocess_async(cmd_config, env=os.environ.copy())
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/test_configs/README.md
|
This folder contains test configs for `accelerate config`. These should be generated for each major version
and are written based on `accelerate config` and selecting the "No distributed training" option.
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/test_configs/0_11_0.yaml
|
compute_environment: LOCAL_MACHINE
deepspeed_config: {}
distributed_type: 'NO'
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: 'no'
num_machines: 1
num_processes: 1
use_cpu: false
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/test_configs/0_12_0.yaml
|
compute_environment: LOCAL_MACHINE
deepspeed_config: {}
distributed_type: 'NO'
downcast_bf16: 'no'
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: 'no'
num_machines: 1
num_processes: 1
use_cpu: false
| 0 |
hf_public_repos/accelerate/tests
|
hf_public_repos/accelerate/tests/test_configs/latest.yaml
|
compute_environment: LOCAL_MACHINE
deepspeed_config: {}
distributed_type: 'NO'
downcast_bf16: 'no'
fsdp_config: {}
gpu_ids: all
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
megatron_lm_config: {}
mixed_precision: 'no'
num_machines: 1
num_processes: 1
rdzv_backend: static
same_network: true
use_cpu: false
tpu_name: 'test-tpu'
tpu_zone: 'us-central1-a'
commands: null
command_file: tests/test_samples/test_command_file.sh
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/docs/README.md
|
<!---
Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
# Generating the documentation
To generate the documentation, you first have to build it. Several packages are necessary to build the doc,
you can install them with the following command, at the root of the code repository:
```bash
pip install -e ".[docs]"
```
Then you need to install our special tool that builds the documentation:
```bash
pip install git+https://github.com/huggingface/doc-builder
```
---
**NOTE**
You only need to generate the documentation to inspect it locally (if you're planning changes and want to
check how they look before committing for instance). You don't have to commit the built documentation.
---
## Building the documentation
Once you have setup the `doc-builder` and additional packages, you can generate the documentation by
typing the following command:
```bash
doc-builder build accelerate docs/source/ --build_dir ~/tmp/test-build
```
You can adapt the `--build_dir` to set any temporary folder that you prefer. This command will create it and generate
the MDX files that will be rendered as the documentation on the main website. You can inspect them in your favorite
Markdown editor.
## Previewing the documentation
To preview the docs, first install the `watchdog` module with:
```bash
pip install watchdog
```
Then run the following command:
```bash
doc-builder preview {package_name} {path_to_docs}
```
For example:
```bash
doc-builder preview accelerate docs/source/
```
The docs will be viewable at [http://localhost:3000](http://localhost:3000). You can also preview the docs once you have opened a PR. You will see a bot add a comment to a link where the documentation with your changes lives.
---
**NOTE**
The `preview` command only works with existing doc files. When you add a completely new file, you need to update `_toctree.yml` & restart `preview` command (`ctrl-c` to stop it & call `doc-builder preview ...` again).
---
## Adding a new element to the navigation bar
Accepted files are Markdown (.md).
Create a file with its extension and put it in the source directory. You can then link it to the toc-tree by putting
the filename without the extension in the [`_toctree.yml`](https://github.com/huggingface/accelerate/blob/main/docs/source/_toctree.yml) file.
## Renaming section headers and moving sections
It helps to keep the old links working when renaming the section header and/or moving sections from one document to another. This is because the old links are likely to be used in Issues, Forums, and Social media and it'd make for a much more superior user experience if users reading those months later could still easily navigate to the originally intended information.
Therefore, we simply keep a little map of moved sections at the end of the document where the original section was. The key is to preserve the original anchor.
So if you renamed a section from: "Section A" to "Section B", then you can add at the end of the file:
```
Sections that were moved:
[ <a href="#section-b">Section A</a><a id="section-a"></a> ]
```
and of course, if you moved it to another file, then:
```
Sections that were moved:
[ <a href="../new-file#section-b">Section A</a><a id="section-a"></a> ]
```
Use the relative style to link to the new file so that the versioned docs continue to work.
## Writing Documentation - Specification
The `huggingface/accelerate` documentation follows the
[Google documentation](https://sphinxcontrib-napoleon.readthedocs.io/en/latest/example_google.html) style for docstrings,
although we can write them directly in Markdown.
### Adding a new tutorial
Adding a new tutorial or section is done in two steps:
- Add a new file under `./source`. This file can either be ReStructuredText (.rst) or Markdown (.md).
- Link that file in `./source/_toctree.yml` on the correct toc-tree.
Make sure to put your new file under the proper section. It's unlikely to go in the first section (*Get Started*), so
depending on the intended targets (beginners, more advanced users, or researchers) it should go in sections two, three, or
four.
### Writing source documentation
Values that should be put in `code` should either be surrounded by backticks: \`like so\`. Note that argument names
and objects like True, None, or any strings should usually be put in `code`.
When mentioning a class, function, or method, it is recommended to use our syntax for internal links so that our tool
adds a link to its documentation with this syntax: \[\`XXXClass\`\] or \[\`function\`\]. This requires the class or
function to be in the main package.
If you want to create a link to some internal class or function, you need to
provide its path. For instance: \[\`utils.gather\`\]. This will be converted into a link with
`utils.gather` in the description. To get rid of the path and only keep the name of the object you are
linking to in the description, add a ~: \[\`~utils.gather\`\] will generate a link with `gather` in the description.
The same works for methods so you can either use \[\`XXXClass.method\`\] or \[~\`XXXClass.method\`\].
#### Defining arguments in a method
Arguments should be defined with the `Args:` (or `Arguments:` or `Parameters:`) prefix, followed by a line return and
an indentation. The argument should be followed by its type, with its shape if it is a tensor, a colon, and its
description:
```
Args:
n_layers (`int`): The number of layers of the model.
```
If the description is too long to fit in one line (more than 119 characters in total), another indentation is necessary
before writing the description after the argument.
Finally, to maintain uniformity if any *one* description is too long to fit on one line, the
rest of the parameters should follow suit and have an indention before their description.
Here's an example showcasing everything so far:
```
Args:
gradient_accumulation_steps (`int`, *optional*, default to 1):
The number of steps that should pass before gradients are accumulated. A number > 1 should be combined with `Accelerator.accumulate`.
cpu (`bool`, *optional*):
Whether or not to force the script to execute on CPU. Will ignore GPU available if set to `True` and force the execution on one process only.
```
For optional arguments or arguments with defaults we follow the following syntax: imagine we have a function with the
following signature:
```
def my_function(x: str = None, a: float = 1):
```
then its documentation should look like this:
```
Args:
x (`str`, *optional*):
This argument controls ... and has a description longer than 119 chars.
a (`float`, *optional*, defaults to 1):
This argument is used to ... and has a description longer than 119 chars.
```
Note that we always omit the "defaults to \`None\`" when None is the default for any argument. Also note that even
if the first line describing your argument type and its default gets long, you can't break it on several lines. You can
however write as many lines as you want in the indented description (see the example above with `input_ids`).
#### Writing a multi-line code block
Multi-line code blocks can be useful for displaying examples. They are done between two lines of three backticks as usual in Markdown:
````
```python
# first line of code
# second line
# etc
```
````
#### Writing a return block
The return block should be introduced with the `Returns:` prefix, followed by a line return and an indentation.
The first line should be the type of the return, followed by a line return. No need to indent further for the elements
building the return.
Here's an example of a single value return:
```
Returns:
`List[int]`: A list of integers in the range [0, 1] --- 1 for a special token, 0 for a sequence token.
```
Here's an example of a tuple return, comprising several objects:
```
Returns:
`tuple(torch.FloatTensor)` comprising various elements depending on the configuration ([`BertConfig`]) and inputs:
- ** loss** (*optional*, returned when `masked_lm_labels` is provided) `torch.FloatTensor` of shape `(1,)` --
Total loss is the sum of the masked language modeling loss and the next sequence prediction (classification) loss.
- **prediction_scores** (`torch.FloatTensor` of shape `(batch_size, sequence_length, config.vocab_size)`) --
Prediction scores of the language modeling head (scores for each vocabulary token before SoftMax).
```
## Styling the docstring
We have an automatic script running with the `make style` comment that will make sure that:
- the docstrings fully take advantage of the line width
- all code examples are formatted using black, like the code of the Transformers library
This script may have some weird failures if you made a syntax mistake or if you uncover a bug. Therefore, it's
recommended to commit your changes before running `make style`, so you can revert the changes done by that script
easily.
## Writing documentation examples
The syntax for Example docstrings can look as follows:
```
Example:
```python
>>> import time
>>> from accelerate import Accelerator
>>> accelerator = Accelerator()
>>> if accelerator.is_main_process:
... time.sleep(2)
>>> else:
... print("I'm waiting for the main process to finish its sleep...")
>>> accelerator.wait_for_everyone()
>>> # Should print on every process at the same time
>>> print("Everyone is here")
```
```
The docstring should give a minimal, clear example of how the respective function
is to be used in inference and also include the expected (ideally sensible)
output.
Often, readers will try out the example before even going through the function
or class definitions. Therefore, it is of utmost importance that the example
works as expected.
| 0 |
hf_public_repos/accelerate
|
hf_public_repos/accelerate/docs/Makefile
|
# Minimal makefile for Sphinx documentation
#
# You can set these variables from the command line.
SPHINXOPTS =
SPHINXBUILD = sphinx-build
SOURCEDIR = source
BUILDDIR = _build
# Put it first so that "make" without argument is like "make help".
help:
@$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
.PHONY: help Makefile
# Catch-all target: route all unknown targets to Sphinx using the new
# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
%: Makefile
@$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
| 0 |
hf_public_repos/accelerate/docs
|
hf_public_repos/accelerate/docs/source/quicktour.md
|
<!--Copyright 2021 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Quick tour
Let's have a look at the 🤗 Accelerate main features and traps to avoid.
## Main use
To use 🤗 Accelerate in your own script, you have to change four things:
1. Import the [`Accelerator`] main class and instantiate one in an `accelerator` object:
```python
from accelerate import Accelerator
accelerator = Accelerator()
```
This should happen as early as possible in your training script as it will initialize everything necessary for
distributed training. You don't need to indicate the kind of environment you are in (just one machine with a GPU, one
machines with several GPUs, several machines with multiple GPUs or a TPU), the library will detect this automatically.
2. Remove the call `.to(device)` or `.cuda()` for your model and input data. The `accelerator` object
will handle this for you and place all those objects on the right device for you. If you know what you're doing, you
can leave those `.to(device)` calls but you should use the device provided by the `accelerator` object:
`accelerator.device`.
To fully deactivate the automatic device placement, pass along `device_placement=False` when initializing your
[`Accelerator`].
<Tip warning={true}>
If you place your objects manually on the proper device, be careful to create your optimizer after putting your
model on `accelerator.device` or your training will fail on TPU.
</Tip>
3. Pass all objects relevant to training (optimizer, model, training dataloader, learning rate scheduler) to the
[`~Accelerator.prepare`] method. This will make sure everything is ready for training.
```python
model, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, lr_scheduler
)
```
In particular, your training dataloader will be sharded across all GPUs/TPU cores available so that each one sees a
different portion of the training dataset. Also, the random states of all processes will be synchronized at the
beginning of each iteration through your dataloader, to make sure the data is shuffled the same way (if you decided to
use `shuffle=True` or any kind of random sampler).
<Tip>
The actual batch size for your training will be the number of devices used multiplied by the batch size you set in
your script: for instance training on 4 GPUs with a batch size of 16 set when creating the training dataloader will
train at an actual batch size of 64.
</Tip>
Alternatively, you can use the option `split_batches=True` when creating and initializing your
[`Accelerator`], in which case the batch size will always stay the same, whether you run your
script on 1, 2, 4, or 64 GPUs.
You should execute this instruction as soon as all objects for training are created, before starting your actual
training loop.
<Tip warning={true}>
You should only pass the learning rate scheduler to [`~Accelerator.prepare`] when the scheduler needs to be stepped
at each optimizer step.
</Tip>
<Tip warning={true}>
Your training dataloader may change length when going through this method: if you run on X GPUs, it will have its
length divided by X (since your actual batch size will be multiplied by X), unless you set
`split_batches=True`.
</Tip>
Any instruction using your training dataloader length (for instance if you want to log the number of total training
steps) should go after the call to [`~Accelerator.prepare`].
You can perfectly send your dataloader to [`~Accelerator.prepare`] on its own, but it's best to send the
model and optimizer to [`~Accelerator.prepare`] together.
You may or may not want to send your validation dataloader to [`~Accelerator.prepare`], depending on
whether you want to run distributed evaluation or not (see below).
4. Replace the line `loss.backward()` by `accelerator.backward(loss)`.
And you're all set! With all these changes, your script will run on your local machine as well as on multiple GPUs or a
TPU! You can either use your favorite tool to launch the distributed training, or you can use the 🤗 Accelerate
launcher.
## Distributed evaluation
You can perform regular evaluation in your training script, if you leave your validation dataloader out of the
[`~Accelerator.prepare`] method. In this case, you will need to put the input data on the
`accelerator.device` manually.
To perform distributed evaluation, send along your validation dataloader to the [`~Accelerator.prepare`]
method:
```python
validation_dataloader = accelerator.prepare(validation_dataloader)
```
As for your training dataloader, it will mean that (should you run your script on multiple devices) each device will
only see part of the evaluation data. This means you will need to group your predictions together. This is very easy to
do with the [`~Accelerator.gather_for_metrics`] method.
```python
for inputs, targets in validation_dataloader:
predictions = model(inputs)
# Gather all predictions and targets
all_predictions, all_targets = accelerator.gather_for_metrics((predictions, targets))
# Example of use with a *Datasets.Metric*
metric.add_batch(all_predictions, all_targets)
```
<Tip warning={true}>
Similar to the training dataloader, passing your validation dataloader through
[`~Accelerator.prepare`] may change it: if you run on X GPUs, it will have its length divided by X
(since your actual batch size will be multiplied by X), unless you set `split_batches=True`.
</Tip>
Any instruction using your training dataloader length (for instance if you need the number of total training steps
to create a learning rate scheduler) should go after the call to [`~Accelerator.prepare`].
Some data at the end of the dataset may be duplicated so the batch can be divided equally among all workers. As a result, metrics
should be calculated through the [`~Accelerator.gather_for_metrics`] method to automatically remove the duplicated data while gathering.
<Tip>
If for some reason you don't wish to have this automatically done, [`~Accelerator.gather`] can be used instead to gather
the data across all processes and this can manually be done instead.
</Tip>
<Tip warning={true}>
The [`~Accelerator.gather`] and [`~Accelerator.gather_for_metrics`] methods require the tensors to be all the same size on each process. If
you have tensors of different sizes on each process (for instance when dynamically padding to the maximum length in
a batch), you should use the [`~Accelerator.pad_across_processes`] method to pad you tensor to the
biggest size across processes.
</Tip>
## Launching your distributed script
You can use the regular commands to launch your distributed training (like `torch.distributed.run` for
PyTorch), they are fully compatible with 🤗 Accelerate.
🤗 Accelerate also provides a CLI tool that unifies all launchers, so you only have to remember one command. To use it,
just run:
```bash
accelerate config
```
on your machine and reply to the questions asked. This will save a *default_config.yaml* file in your cache folder for
🤗 Accelerate. That cache folder is (with decreasing order of priority):
- The content of your environment variable `HF_HOME` suffixed with *accelerate*.
- If it does not exist, the content of your environment variable `XDG_CACHE_HOME` suffixed with
*huggingface/accelerate*.
- If this does not exist either, the folder *~/.cache/huggingface/accelerate*
You can also specify with the flag `--config_file` the location of the file you want to save.
Once this is done, you can test everything is going well on your setup by running:
```bash
accelerate test
```
This will launch a short script that will test the distributed environment. If it runs fine, you are ready for the next
step!
Note that if you specified a location for the config file in the previous step, you need to pass it here as well:
```bash
accelerate test --config_file path_to_config.yaml
```
Now that this is done, you can run your script with the following command:
```bash
accelerate launch path_to_script.py --args_for_the_script
```
If you stored the config file in a non-default location, you can indicate it to the launcher like this:
```bash
accelerate launch --config_file path_to_config.yaml path_to_script.py --args_for_the_script
```
You can also override any of the arguments determined by your config file.
To see the complete list of parameters that you can pass in, run `accelerate launch -h`.
Check out the [Launch tutorial](basic_tutorials/launch) for more information about launching your scripts.
## Launching training from a notebook
In Accelerate 0.3.0, a new [`notebook_launcher`] has been introduced to help you launch your training
function from a notebook. This launcher supports launching a training with TPUs on Colab or Kaggle, as well as training
on several GPUs (if the machine on which you are running your notebook has them).
Just define a function responsible for your whole training and/or evaluation in a cell of the notebook, then execute a
cell with the following code:
```python
from accelerate import notebook_launcher
notebook_launcher(training_function)
```
<Tip warning={true}>
Your [`Accelerator`] object should only be defined inside the training function. This is because the
initialization should be done inside the launcher only.
</Tip>
Check out the [Notebook Launcher tutorial](basic_tutorials/notebook) for more information about training on TPUs.
## Training on TPU
If you want to launch your script on TPUs, there are a few caveats you should be aware of. Behind the scenes, the TPUs
will create a graph of all the operations happening in your training step (forward pass, backward pass and optimizer
step). This is why your first step of training will always be very long as building and compiling this graph for
optimizations takes some time.
The good news is that this compilation will be cached so the second step and all the following will be much faster. The
bad news is that it only applies if all of your steps do exactly the same operations, which implies:
- having all tensors of the same length in all your batches
- having static code (i.e., not a for loop of length that could change from step to step)
Having any of the things above change between two steps will trigger a new compilation which will, once again, take a
lot of time. In practice, that means you must take special care to have all your tensors in your inputs of the same
shape (so no dynamic padding for instance if you are in an NLP problem) and should not use layers with for loops that
have different lengths depending on the inputs (such as an LSTM) or the training will be excruciatingly slow.
To introduce special behavior in your script for TPUs you can check the `distributed_type` of your
`accelerator`:
```python docstyle-ignore
from accelerate import DistributedType
if accelerator.distributed_type == DistributedType.TPU:
# do something of static shape
else:
# go crazy and be dynamic
```
The [NLP example](https://github.com/huggingface/accelerate/blob/main/examples/nlp_example.py) shows an example in a
situation with dynamic padding.
One last thing to pay close attention to: if your model has tied weights (such as language models which tie the weights
of the embedding matrix with the weights of the decoder), moving this model to the TPU (either yourself or after you
passed your model to [`~Accelerator.prepare`]) will break the tying. You will need to retie the weights
after. You can find an example of this in the [run_clm_no_trainer](https://github.com/huggingface/transformers/blob/master/examples/pytorch/language-modeling/run_clm.py) script in
the Transformers repository.
Check out the [TPU tutorial](concept_guides/training_tpu) for more information about training on TPUs.
## Other caveats
We list here all smaller issues you could have in your script conversion and how to resolve them.
### Execute a statement only on one processes
Some of your instructions only need to run for one process on a given server: for instance a data download or a log
statement. To do this, wrap the statement in a test like this:
```python docstyle-ignore
if accelerator.is_local_main_process:
# Is executed once per server
```
Another example is progress bars: to avoid having multiple progress bars in your output, you should only display one on
the local main process:
```python
from tqdm.auto import tqdm
progress_bar = tqdm(range(args.max_train_steps), disable=not accelerator.is_local_main_process)
```
The *local* means per machine: if you are running your training on two servers with several GPUs, the instruction will
be executed once on each of those servers. If you need to execute something only once for all processes (and not per
machine) for instance, uploading the final model to the 🤗 model hub, wrap it in a test like this:
```python docstyle-ignore
if accelerator.is_main_process:
# Is executed once only
```
For printing statements you only want executed once per machine, you can just replace the `print` function by
`accelerator.print`.
### Defer execution
When you run your usual script, instructions are executed in order. Using 🤗 Accelerate to deploy your script on several
GPUs at the same time introduces a complication: while each process executes all instructions in order, some may be
faster than others.
You might need to wait for all processes to have reached a certain point before executing a given instruction. For
instance, you shouldn't save a model before being sure every process is done with training. To do this, just write the
following line in your code:
```
accelerator.wait_for_everyone()
```
This instruction will block all the processes that arrive first until all the other processes have reached that
point (if you run your script on just one GPU or CPU, this won't do anything).
### Saving/loading a model
Saving the model you trained might need a bit of adjustment: first you should wait for all processes to reach that
point in the script as shown above, and then, you should unwrap your model before saving it. This is because when going
through the [`~Accelerator.prepare`] method, your model may have been placed inside a bigger model,
which deals with the distributed training. This in turn means that saving your model state dictionary without taking
any precaution will take that potential extra layer into account, and you will end up with weights you can't load back
in your base model. The [`~Accelerator.save_model`] method will help you to achieve that. It will unwrap your model and save
the model state dictionnary.
Here is an example:
```
accelerator.wait_for_everyone()
accelerator.save_model(model, save_directory)
```
The [`~Accelerator.save_model`] method can also save a model into sharded checkpoints or with safetensors format.
Here is an example:
```python
accelerator.wait_for_everyone()
accelerator.save_model(model, save_directory, max_shard_size="1GB", safe_serialization=True)
```
If your script contains logic to load a checkpoint, we also recommend you load your weights in the unwrapped model
(this is only useful if you use the load function after making your model go through
[`~Accelerator.prepare`]). Here is an example:
```python
unwrapped_model = accelerator.unwrap_model(model)
path_to_checkpoint = os.path.join(save_directory,"pytorch_model.bin")
unwrapped_model.load_state_dict(torch.load(path_to_checkpoint))
```
Note that since all the model parameters are references to tensors, this will load your weights inside `model`.
If you want to load a sharded checkpoint or a checkpoint with safetensors format into the model with a specific `device`, we recommend you to load it with [`~utils.load_checkpoint_in_model`] function. Here's an example:
```python
load_checkpoint_in_model(unwrapped_model, save_directory, device_map={"":device})
```
## Saving/loading entire states
When training your model, you may want to save the current state of the model, optimizer, random generators, and potentially LR schedulers to be restored in the _same script_.
You can use [`~Accelerator.save_state`] and [`~Accelerator.load_state`] respectively to do so.
To further customize where and how states saved through [`~Accelerator.save_state`] the [`~utils.ProjectConfiguration`] class can be used. For example
if `automatic_checkpoint_naming` is enabled each saved checkpoint will be located then at `Accelerator.project_dir/checkpoints/checkpoint_{checkpoint_number}`.
If you have registered any other stateful items to be stored through [`~Accelerator.register_for_checkpointing`] they will also be saved and/or loaded.
<Tip>
Every object passed to [`~Accelerator.register_for_checkpointing`] must have a `load_state_dict` and `state_dict` function to be stored
</Tip>
### Gradient clipping
If you are using gradient clipping in your script, you should replace the calls to
`torch.nn.utils.clip_grad_norm_` or `torch.nn.utils.clip_grad_value_` with [`~Accelerator.clip_grad_norm_`]
and [`~Accelerator.clip_grad_value_`] respectively.
### Mixed Precision training
If you are running your training in Mixed Precision with 🤗 Accelerate, you will get the best result with your loss being
computed inside your model (like in Transformer models for instance). Every computation outside of the model will be
executed in full precision (which is generally what you want for loss computation, especially if it involves a
softmax). However you might want to put your loss computation inside the [`~Accelerator.autocast`] context manager:
```
with accelerator.autocast():
loss = complex_loss_function(outputs, target):
```
Another caveat with Mixed Precision training is that the gradient will skip a few updates at the beginning and
sometimes during training: because of the dynamic loss scaling strategy, there are points during training where the
gradients have overflown, and the loss scaling factor is reduced to avoid this happening again at the next step.
This means that you may update your learning rate scheduler when there was no update, which is fine in general, but may
have an impact when you have very little training data, or if the first learning rate values of your scheduler are very
important. In this case, you can skip the learning rate scheduler updates when the optimizer step was not done like
this:
```
if not accelerator.optimizer_step_was_skipped:
lr_scheduler.step()
```
### Gradient Accumulation
To perform gradient accumulation use [`~Accelerator.accumulate`] and specify a `gradient_accumulation_steps`.
This will also automatically ensure the gradients are synced or unsynced when on multi-device training, check if the step should
actually be performed, and auto-scale the loss:
```python
accelerator = Accelerator(gradient_accumulation_steps=2)
model, optimizer, training_dataloader = accelerator.prepare(model, optimizer, training_dataloader)
for input, label in training_dataloader:
with accelerator.accumulate(model):
predictions = model(input)
loss = loss_function(predictions, label)
accelerator.backward(loss)
optimizer.step()
scheduler.step()
optimizer.zero_grad()
```
### DeepSpeed
DeepSpeed support is experimental, so the underlying API will evolve in the near future and may have some slight
breaking changes. In particular, 🤗 Accelerate does not support DeepSpeed config you have written yourself yet, this
will be added in a next version.
<Tip warning={true}>
The [`notebook_launcher`] does not support the DeepSpeed integration yet.
</Tip>
## Internal mechanism
Internally, the library works by first analyzing the environment in which the script is launched to determine which
kind of distributed setup is used, how many different processes there are and which one the current script is in. All
that information is stored in the [`~AcceleratorState`].
This class is initialized the first time you instantiate an [`~Accelerator`] as well as performing any
specific initialization your distributed setup needs. Its state is then uniquely shared through all instances of
[`~state.AcceleratorState`].
Then, when calling [`~Accelerator.prepare`], the library:
- wraps your model(s) in the container adapted for the distributed setup,
- wraps your optimizer(s) in a [`~optimizer.AcceleratedOptimizer`],
- creates a new version of your dataloader(s) in a [`~data_loader.DataLoaderShard`].
While the model(s) and optimizer(s) are just put in simple wrappers, the dataloader(s) are re-created. This is mostly
because PyTorch does not let the user change the `batch_sampler` of a dataloader once it's been created and the
library handles the sharding of your data between processes by changing that `batch_sampler` to yield every other
`num_processes` batches.
The [`~data_loader.DataLoaderShard`] subclasses `DataLoader` to add the following functionality:
- it synchronizes the appropriate random number generator of all processes at each new iteration, to ensure any
randomization (like shuffling) is done the exact same way across processes.
- it puts the batches on the proper device before yielding them (unless you have opted out of
`device_placement=True`).
The random number generator synchronization will by default synchronize:
- the `generator` attribute of a given sampler (like the PyTorch `RandomSampler`) for PyTorch >= 1.6
- the main random number generator in PyTorch <=1.5.1
You can choose which random number generator(s) to synchronize with the `rng_types` argument of the main
[`Accelerator`]. In PyTorch >= 1.6, it is recommended to rely on a local `generator` to avoid
setting the same seed in the main random number generator in all processes.
<Tip warning={true}>
Synchronization of the main torch (or CUDA or XLA) random number generator will affect any other potential random
artifacts you could have in your dataset (like random data augmentation) in the sense that all processes will get
the same random numbers from the torch random modules (so will apply the same random data augmentation if it's
controlled by torch).
</Tip>
<Tip>
The randomization part of your custom sampler, batch sampler or iterable dataset should be done using a local
`torch.Generator` object (in PyTorch >= 1.6), see the traditional `RandomSampler`, as an example.
</Tip>
For more details about the internals, see the [Internals page](package_reference/torch_wrappers).
| 0 |
hf_public_repos/accelerate/docs
|
hf_public_repos/accelerate/docs/source/index.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Accelerate
🤗 Accelerate is a library that enables the same PyTorch code to be run across any distributed configuration by adding just four lines of code! In short, training and inference at scale made simple, efficient and adaptable.
```diff
+ from accelerate import Accelerator
+ accelerator = Accelerator()
+ model, optimizer, training_dataloader, scheduler = accelerator.prepare(
+ model, optimizer, training_dataloader, scheduler
+ )
for batch in training_dataloader:
optimizer.zero_grad()
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
+ accelerator.backward(loss)
optimizer.step()
scheduler.step()
```
Built on `torch_xla` and `torch.distributed`, 🤗 Accelerate takes care of the heavy lifting, so you don't have to write any custom code to adapt to these platforms.
Convert existing codebases to utilize [DeepSpeed](usage_guides/deepspeed), perform [fully sharded data parallelism](usage_guides/fsdp), and have automatic support for mixed-precision training!
<Tip>
To get a better idea of this process, make sure to check out the [Tutorials](basic_tutorials/overview)!
</Tip>
This code can then be launched on any system through Accelerate's CLI interface:
```bash
accelerate launch {my_script.py}
```
<div class="mt-10">
<div class="w-full flex flex-col space-y-4 md:space-y-0 md:grid md:grid-cols-2 md:gap-y-4 md:gap-x-5">
<a class="!no-underline border dark:border-gray-700 p-5 rounded-lg shadow hover:shadow-lg" href="./basic_tutorials/overview"
><div class="w-full text-center bg-gradient-to-br from-blue-400 to-blue-500 rounded-lg py-1.5 font-semibold mb-5 text-white text-lg leading-relaxed">Tutorials</div>
<p class="text-gray-700">Learn the basics and become familiar with using 🤗 Accelerate. Start here if you are using 🤗 Accelerate for the first time!</p>
</a>
<a class="!no-underline border dark:border-gray-700 p-5 rounded-lg shadow hover:shadow-lg" href="./usage_guides/explore"
><div class="w-full text-center bg-gradient-to-br from-indigo-400 to-indigo-500 rounded-lg py-1.5 font-semibold mb-5 text-white text-lg leading-relaxed">How-to guides</div>
<p class="text-gray-700">Practical guides to help you achieve a specific goal. Take a look at these guides to learn how to use 🤗 Accelerate to solve real-world problems.</p>
</a>
<a class="!no-underline border dark:border-gray-700 p-5 rounded-lg shadow hover:shadow-lg" href="./concept_guides/gradient_synchronization"
><div class="w-full text-center bg-gradient-to-br from-pink-400 to-pink-500 rounded-lg py-1.5 font-semibold mb-5 text-white text-lg leading-relaxed">Conceptual guides</div>
<p class="text-gray-700">High-level explanations for building a better understanding of important topics such as avoiding subtle nuances and pitfalls in distributed training and DeepSpeed.</p>
</a>
<a class="!no-underline border dark:border-gray-700 p-5 rounded-lg shadow hover:shadow-lg" href="./package_reference/accelerator"
><div class="w-full text-center bg-gradient-to-br from-purple-400 to-purple-500 rounded-lg py-1.5 font-semibold mb-5 text-white text-lg leading-relaxed">Reference</div>
<p class="text-gray-700">Technical descriptions of how 🤗 Accelerate classes and methods work.</p>
</a>
</div>
</div>
| 0 |
hf_public_repos/accelerate/docs
|
hf_public_repos/accelerate/docs/source/_toctree.yml
|
- sections:
- local: index
title: 🤗 Accelerate
- local: basic_tutorials/install
title: Installation
- local: quicktour
title: Quicktour
title: Getting started
- sections:
- local: basic_tutorials/overview
title: Overview
- local: basic_tutorials/migration
title: Migrating to 🤗 Accelerate
- local: basic_tutorials/launch
title: Launching distributed code
- local: basic_tutorials/notebook
title: Launching distributed training from Jupyter Notebooks
title: Tutorials
- sections:
- local: usage_guides/explore
title: Start Here!
- local: usage_guides/training_zoo
title: Example Zoo
- local: usage_guides/big_modeling
title: How to perform inference on large models with small resources
- local: usage_guides/quantization
title: How to quantize model
- local: usage_guides/distributed_inference
title: How to perform distributed inference with normal resources
- local: usage_guides/gradient_accumulation
title: Performing gradient accumulation
- local: usage_guides/local_sgd
title: Accelerating training with local SGD
- local: usage_guides/checkpoint
title: Saving and loading training states
- local: usage_guides/tracking
title: Using experiment trackers
- local: usage_guides/debug
title: Debugging timeout errors
- local: usage_guides/memory
title: How to avoid CUDA Out-of-Memory
- local: usage_guides/mps
title: How to use Apple Silicon M1 GPUs
- local: usage_guides/deepspeed
title: How to use DeepSpeed
- local: usage_guides/fsdp
title: How to use Fully Sharded Data Parallelism
- local: usage_guides/megatron_lm
title: How to use Megatron-LM
- local: usage_guides/sagemaker
title: How to use 🤗 Accelerate with SageMaker
- local: usage_guides/ipex
title: How to use 🤗 Accelerate with Intel® Extension for PyTorch for cpu
title: How-To Guides
- sections:
- local: concept_guides/performance
title: Comparing performance across distributed setups
- local: concept_guides/deferring_execution
title: Executing and deferring jobs
- local: concept_guides/gradient_synchronization
title: Gradient synchronization
- local: concept_guides/training_tpu
title: TPU best practices
title: Concepts and fundamentals
- sections:
- local: package_reference/accelerator
title: Main Accelerator class
- local: package_reference/state
title: Stateful configuration classes
- local: package_reference/cli
title: The Command Line
- local: package_reference/torch_wrappers
title: Torch wrapper classes
- local: package_reference/tracking
title: Experiment trackers
- local: package_reference/launchers
title: Distributed launchers
- local: package_reference/deepspeed
title: DeepSpeed utilities
- local: package_reference/logging
title: Logging
- local: package_reference/big_modeling
title: Working with large models
- local: package_reference/kwargs
title: Kwargs handlers
- local: package_reference/utilities
title: Utility functions and classes
- local: package_reference/megatron_lm
title: Megatron-LM Utilities
- local: package_reference/fsdp
title: Fully Sharded Data Parallelism Utilities
title: "Reference"
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/mps.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Accelerated PyTorch Training on Mac
With PyTorch v1.12 release, developers and researchers can take advantage of Apple silicon GPUs for significantly faster model training.
This unlocks the ability to perform machine learning workflows like prototyping and fine-tuning locally, right on Mac.
Apple's Metal Performance Shaders (MPS) as a backend for PyTorch enables this and can be used via the new `"mps"` device.
This will map computational graphs and primitives on the MPS Graph framework and tuned kernels provided by MPS.
For more information please refer official documents [Introducing Accelerated PyTorch Training on Mac](https://pytorch.org/blog/introducing-accelerated-pytorch-training-on-mac/)
and [MPS BACKEND](https://pytorch.org/docs/stable/notes/mps.html).
### Benefits of Training and Inference using Apple Silicon Chips
1. Enables users to train larger networks or batch sizes locally
2. Reduces data retrieval latency and provides the GPU with direct access to the full memory store due to unified memory architecture.
Therefore, improving end-to-end performance.
3. Reduces costs associated with cloud-based development or the need for additional local GPUs.
**Pre-requisites**: To install torch with mps support,
please follow this nice medium article [GPU-Acceleration Comes to PyTorch on M1 Macs](https://medium.com/towards-data-science/gpu-acceleration-comes-to-pytorch-on-m1-macs-195c399efcc1).
## How it works out of the box
It is enabled by default on MacOs machines with MPS enabled Apple Silicon GPUs.
To disable it, pass `--cpu` flag to `accelerate launch` command or answer the corresponding question when answering the `accelerate config` questionnaire.
You can directly run the following script to test it out on MPS enabled Apple Silicon machines:
```bash
accelerate launch /examples/cv_example.py --data_dir images
```
## A few caveats to be aware of
1. We strongly recommend to install PyTorch >= 1.13 (nightly version at the time of writing) on your MacOS machine.
It has major fixes related to model correctness and performance improvements for transformer based models.
Please refer to https://github.com/pytorch/pytorch/issues/82707 for more details.
2. Distributed setups `gloo` and `nccl` are not working with `mps` device.
This means that currently only single GPU of `mps` device type can be used.
Finally, please, remember that, 🤗 `Accelerate` only integrates MPS backend, therefore if you
have any problems or questions with regards to MPS backend usage, please, file an issue with [PyTorch GitHub](https://github.com/pytorch/pytorch/issues).
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/checkpoint.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Checkpointing
When training a PyTorch model with 🤗 Accelerate, you may often want to save and continue a state of training. Doing so requires
saving and loading the model, optimizer, RNG generators, and the GradScaler. Inside 🤗 Accelerate are two convenience functions to achieve this quickly:
- Use [`~Accelerator.save_state`] for saving everything mentioned above to a folder location
- Use [`~Accelerator.load_state`] for loading everything stored from an earlier `save_state`
To further customize where and how states are saved through [`~Accelerator.save_state`] the [`~utils.ProjectConfiguration`] class can be used. For example
if `automatic_checkpoint_naming` is enabled each saved checkpoint will be located then at `Accelerator.project_dir/checkpoints/checkpoint_{checkpoint_number}`.
It should be noted that the expectation is that those states come from the same training script, they should not be from two separate scripts.
- By using [`~Accelerator.register_for_checkpointing`], you can register custom objects to be automatically stored or loaded from the two prior functions,
so long as the object has a `state_dict` **and** a `load_state_dict` functionality. This could include objects such as a learning rate scheduler.
Below is a brief example using checkpointing to save and reload a state during training:
```python
from accelerate import Accelerator
import torch
accelerator = Accelerator(project_dir="my/save/path")
my_scheduler = torch.optim.lr_scheduler.StepLR(my_optimizer, step_size=1, gamma=0.99)
my_model, my_optimizer, my_training_dataloader = accelerator.prepare(my_model, my_optimizer, my_training_dataloader)
# Register the LR scheduler
accelerator.register_for_checkpointing(my_scheduler)
# Save the starting state
accelerator.save_state()
device = accelerator.device
my_model.to(device)
# Perform training
for epoch in range(num_epochs):
for batch in my_training_dataloader:
my_optimizer.zero_grad()
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = my_model(inputs)
loss = my_loss_function(outputs, targets)
accelerator.backward(loss)
my_optimizer.step()
my_scheduler.step()
# Restore the previous state
accelerator.load_state("my/save/path/checkpointing/checkpoint_0")
```
## Restoring the state of the DataLoader
After resuming from a checkpoint, it may also be desirable to resume from a particular point in the active `DataLoader` if
the state was saved during the middle of an epoch. You can use [`~Accelerator.skip_first_batches`] to do so.
```python
from accelerate import Accelerator
accelerator = Accelerator(project_dir="my/save/path")
train_dataloader = accelerator.prepare(train_dataloader)
accelerator.load_state("my_state")
# Assume the checkpoint was saved 100 steps into the epoch
skipped_dataloader = accelerator.skip_first_batches(train_dataloader, 100)
# After the first iteration, go back to `train_dataloader`
# First epoch
for batch in skipped_dataloader:
# Do something
pass
# Second epoch
for batch in train_dataloader:
# Do something
pass
```
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/debug.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Debugging Distributed Operations
When running scripts in a distributed fashion, often functions such as [`Accelerator.gather`] and [`Accelerator.reduce`] (and others) are neccessary to grab tensors across devices and perform certain operations on them. However, if the tensors which are being grabbed are not the proper shapes then this will result in your code hanging forever. The only sign that exists of this truly happening is hitting a timeout exception from `torch.distributed`, but this can get quite costly as usually the timeout is 10 minutes.
Accelerate now has a `debug` mode which adds a neglible amount of time to each operation, but allows it to verify that the inputs you are bringing in can *actually* perform the operation you want **without** hitting this timeout problem!
## Visualizing the problem
To have a tangible example of this issue, let's take the following setup (on 2 GPUs):
```python
from accelerate import PartialState
state = PartialState()
if state.process_index == 0:
tensor = torch.tensor([[0.0, 1, 2, 3, 4]]).to(state.device)
else:
tensor = torch.tensor([[[0.0, 1, 2, 3, 4], [5, 6, 7, 8, 9]]]).to(state.device)
broadcast_tensor = broadcast(tensor)
print(broadcast_tensor)
```
We've created a single tensor on each device, with two radically different shapes. With this setup if we want to perform an operation such as [`utils.broadcast`], we would forever hit a timeout because `torch.distributed` requires that these operations have the **exact same shape** across all processes for it to work.
If you run this yourself, you will find that `broadcast_tensor` can be printed on the main process, but its results won't quite be right, and then it will just hang never printing it on any of the other processes:
```
>>> tensor([[0, 1, 2, 3, 4]], device='cuda:0')
```
## The solution
By enabling Accelerate's operational debug mode, Accelerate will properly find and catch errors such as this and provide a very clear traceback immediatly:
```
Traceback (most recent call last):
File "/home/zach_mueller_huggingface_co/test.py", line 18, in <module>
main()
File "/home/zach_mueller_huggingface_co/test.py", line 15, in main
main()broadcast_tensor = broadcast(tensor)
File "/home/zach_mueller_huggingface_co/accelerate/src/accelerate/utils/operations.py", line 303, in wrapper
broadcast_tensor = broadcast(tensor)
accelerate.utils.operations.DistributedOperationException: Cannot apply desired operation due to shape mismatches. All shapes across devices must be valid.
Operation: `accelerate.utils.operations.broadcast`
Input shapes:
- Process 0: [1, 5]
- Process 1: [1, 2, 5]
```
This explains that the shapes across our devices were *not* the same, and that we should ensure that they match properly to be compatible. Typically this means that there is either an extra dimension, or certain dimensions are incompatible with the operation.
To enable this please do one of the following:
Enable it through the questionarre during `accelerate config` (recommended)
From the CLI:
```
accelerate launch --debug {my_script.py} --arg1 --arg2
```
As an environmental variable (which avoids the need for `accelerate launch`):
```
ACCELERATE_DEBUG_MODE="1" accelerate launch {my_script.py} --arg1 --arg2
```
Manually changing the `config.yaml` file:
```diff
compute_environment: LOCAL_MACHINE
+debug: true
```
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/local_sgd.md
|
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Using Local SGD with 🤗 Accelerate
Local SGD is a technique for distributed training where gradients are not synchronized every step. Thus, each process updates its own version of the model weights and after a given number of steps these weights are synchronized by averaging across all processes. This improves communication efficiency and can lead to substantial training speed up especially when a computer lacks a faster interconnect such as NVLink.
Unlike gradient accumulation (where improving communication efficiency requires increasing the effective batch size), Local SGD does not require changing a batch size or a learning rate / schedule. However, if necessary, Local SGD can be combined with gradient accumulation as well.
In this tutorial you will see how to quickly setup Local SGD 🤗 Accelerate. Compared to a standard Accelerate setup, this requires only two extra lines of code.
This example will use a very simplistic PyTorch training loop that performs gradient accumulation every two batches:
```python
device = "cuda"
model.to(device)
gradient_accumulation_steps = 2
for index, batch in enumerate(training_dataloader):
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
loss = loss / gradient_accumulation_steps
loss.backward()
if (index + 1) % gradient_accumulation_steps == 0:
optimizer.step()
scheduler.step()
optimizer.zero_grad()
```
## Converting it to 🤗 Accelerate
First the code shown earlier will be converted to use 🤗 Accelerate with neither a LocalSGD or a gradient accumulation helper:
```diff
+ from accelerate import Accelerator
+ accelerator = Accelerator()
+ model, optimizer, training_dataloader, scheduler = accelerator.prepare(
+ model, optimizer, training_dataloader, scheduler
+ )
for index, batch in enumerate(training_dataloader):
inputs, targets = batch
- inputs = inputs.to(device)
- targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
loss = loss / gradient_accumulation_steps
+ accelerator.backward(loss)
if (index+1) % gradient_accumulation_steps == 0:
optimizer.step()
scheduler.step()
```
## Letting 🤗 Accelerate handle model synchronization
All that is left now is to let 🤗 Accelerate handle model parameter synchronization **and** the gradient accumulation for us. For simplicity let us assume we need to synchronize every 8 steps. This is
achieved by adding one `with LocalSGD` statement and one call `local_sgd.step()` after every optimizer step:
```diff
+local_sgd_steps=8
+with LocalSGD(accelerator=accelerator, model=model, local_sgd_steps=8, enabled=True) as local_sgd:
for batch in training_dataloader:
with accelerator.accumulate(model):
inputs, targets = batch
outputs = model(inputs)
loss = loss_function(outputs, targets)
accelerator.backward(loss)
optimizer.step()
scheduler.step()
optimizer.zero_grad()
+ local_sgd.step()
```
Under the hood, the Local SGD code **disables** automatic gradient synchornization (but accumulation still works as expected!). Instead it averages model parameters every `local_sgd_steps` steps (as well as in the end of the training loop).
## Limitations
The current implementation works only with basic multi-GPU (or multi-CPU) training without, e.g., [DeepSpeed.](https://github.com/microsoft/DeepSpeed).
## References
Although we are not aware of the true origins of this simple approach, the idea of local SGD is quite old and goes
back to at least:
Zhang, J., De Sa, C., Mitliagkas, I., & Ré, C. (2016). [Parallel SGD: When does averaging help?. arXiv preprint
arXiv:1606.07365.](https://arxiv.org/abs/1606.07365)
We credit the term Local SGD to the following paper (but there might be earlier references we are not aware of).
Stich, Sebastian Urban. ["Local SGD Converges Fast and Communicates Little." ICLR 2019-International Conference on
Learning Representations. No. CONF. 2019.](https://arxiv.org/abs/1805.09767)
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/fsdp.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Fully Sharded Data Parallel
To accelerate training huge models on larger batch sizes, we can use a fully sharded data parallel model.
This type of data parallel paradigm enables fitting more data and larger models by sharding the optimizer states, gradients and parameters.
To read more about it and the benefits, check out the [Fully Sharded Data Parallel blog](https://pytorch.org/blog/introducing-pytorch-fully-sharded-data-parallel-api/).
We have integrated the latest PyTorch's Fully Sharded Data Parallel (FSDP) training feature.
All you need to do is enable it through the config.
## How it works out of the box
On your machine(s) just run:
```bash
accelerate config
```
and answer the questions asked. This will generate a config file that will be used automatically to properly set the
default options when doing
```bash
accelerate launch my_script.py --args_to_my_script
```
For instance, here is how you would run the NLP example (from the root of the repo) with FSDP enabled:
```bash
compute_environment: LOCAL_MACHINE
deepspeed_config: {}
distributed_type: FSDP
downcast_bf16: 'no'
fsdp_config:
fsdp_auto_wrap_policy: TRANSFORMER_BASED_WRAP
fsdp_backward_prefetch_policy: BACKWARD_PRE
fsdp_offload_params: false
fsdp_sharding_strategy: 1
fsdp_state_dict_type: FULL_STATE_DICT
fsdp_transformer_layer_cls_to_wrap: GPT2Block
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: 'no'
num_machines: 1
num_processes: 2
use_cpu: false
```
```bash
accelerate launch examples/nlp_example.py
```
Currently, `Accelerate` supports the following config through the CLI:
```bash
`Sharding Strategy`: [1] FULL_SHARD (shards optimizer states, gradients and parameters), [2] SHARD_GRAD_OP (shards optimizer states and gradients), [3] NO_SHARD
`Offload Params`: Decides Whether to offload parameters and gradients to CPU
`Auto Wrap Policy`: [1] TRANSFORMER_BASED_WRAP, [2] SIZE_BASED_WRAP, [3] NO_WRAP [4] "HYBRID_SHARD" [5] "HYBRID_SHARD_ZERO2"
`Transformer Layer Class to Wrap`: When using `TRANSFORMER_BASED_WRAP`, user specifies comma-separated string of transformer layer class names (case-sensitive) to wrap ,e.g,
`BertLayer`, `GPTJBlock`, `T5Block`, `BertLayer,BertEmbeddings,BertSelfOutput`...
`Min Num Params`: minimum number of parameters when using `SIZE_BASED_WRAP`
`Backward Prefetch`: [1] BACKWARD_PRE, [2] BACKWARD_POST, [3] NO_PREFETCH
`State Dict Type`: [1] FULL_STATE_DICT, [2] LOCAL_STATE_DICT, [3] SHARDED_STATE_DICT
`Use Orig Params`: If True, allows non-uniform `requires_grad` during init, which means support for interspersed frozen and trainable paramteres.
Useful in cases such as parameter-efficient fine-tuning.
Please refer this [blog](https://dev-discuss.pytorch.org/t/rethinking-pytorch-fully-sharded-data-parallel-fsdp-from-first-principles/1019)
`Sync Module States`: If True, each individually wrapped FSDP unit will broadcast module parameters from rank 0
`Forward Prefetch`: If True, then FSDP explicitly prefetches the next upcoming all-gather while executing in the forward pass
```
For additional and more nuanced control, you can specify other FSDP parameters via `FullyShardedDataParallelPlugin`.
When creating `FullyShardedDataParallelPlugin` object, pass it the parameters that weren't part of the accelerate config or if you want to override them.
The FSDP parameters will be picked based on the accelerate config file or launch command arguments and other parameters that you will pass directly through the `FullyShardedDataParallelPlugin` object will set/override that.
Below is an example:
```py
from accelerate import FullyShardedDataParallelPlugin
from torch.distributed.fsdp.fully_sharded_data_parallel import FullOptimStateDictConfig, FullStateDictConfig
fsdp_plugin = FullyShardedDataParallelPlugin(
state_dict_config=FullStateDictConfig(offload_to_cpu=False, rank0_only=False),
optim_state_dict_config=FullOptimStateDictConfig(offload_to_cpu=False, rank0_only=False),
)
accelerator = Accelerator(fsdp_plugin=fsdp_plugin)
```
## Saving and loading
The new recommended way of checkpointing when using FSDP models is to use `SHARDED_STATE_DICT` as `StateDictType` when setting up the accelerate config.
Below is the code snippet to save using `save_state` utility of accelerate.
```py
accelerator.save_state("ckpt")
```
Inspect the ckeckpoint folder to see model and optimizer as shards per process:
```
ls ckpt
# optimizer_0 pytorch_model_0 random_states_0.pkl random_states_1.pkl scheduler.bin
cd ckpt
ls optimizer_0
# __0_0.distcp __1_0.distcp
ls pytorch_model_0
# __0_0.distcp __1_0.distcp
```
To load them back for resuming the training, use the `load_state` utility of accelerate
```py
accelerator.load_state("ckpt")
```
When using transformers `save_pretrained`, pass `state_dict=accelerator.get_state_dict(model)` to save the model state dict.
Below is an example:
```diff
unwrapped_model.save_pretrained(
args.output_dir,
is_main_process=accelerator.is_main_process,
save_function=accelerator.save,
+ state_dict=accelerator.get_state_dict(model),
)
```
### State Dict
`accelerator.get_state_dict` will call the underlying `model.state_dict` implementation. With a model wrapped by FSDP, the default behavior of `state_dict` is to gather all of the state in the rank 0 device. This can cause CUDA out of memory errors if the parameters don't fit on a single GPU.
To avoid this, PyTorch provides a context manager that adjusts the behavior of `state_dict`. To offload some of the state dict onto CPU, you can use the following code:
```
from torch.distributed.fsdp import FullyShardedDataParallel as FSDP, StateDictType, FullStateDictConfig
full_state_dict_config = FullStateDictConfig(offload_to_cpu=True, rank0_only=True)
with FSDP.state_dict_type(unwrapped_model, StateDictType.FULL_STATE_DICT, full_state_dict_config):
state = accelerator.get_state_dict(unwrapped_model)
```
You can then pass `state` into the `save_pretrained` method. There are several modes for `StateDictType` and `FullStateDictConfig` that you can use to control the behavior of `state_dict`. For more information, see the [PyTorch documentation](https://pytorch.org/docs/stable/fsdp.html).
## A few caveats to be aware of
- PyTorch FSDP auto wraps sub-modules, flattens the parameters and shards the parameters in place.
Due to this, any optimizer created before model wrapping gets broken and occupies more memory.
Hence, it is highly recommended and efficient to prepare the model before creating the optimizer.
`Accelerate` will automatically wrap the model and create an optimizer for you in case of single model with a warning message.
> FSDP Warning: When using FSDP, it is efficient and recommended to call prepare for the model before creating the optimizer
However, below is the recommended way to prepare model and optimizer while using FSDP:
```diff
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", return_dict=True)
+ model = accelerator.prepare(model)
optimizer = torch.optim.AdamW(params=model.parameters(), lr=lr)
- model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
- model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
- )
+ optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
+ optimizer, train_dataloader, eval_dataloader, lr_scheduler
+ )
```
- In case of a single model, if you have created the optimizer with multiple parameter groups and called prepare with them together,
then the parameter groups will be lost and the following warning is displayed:
> FSDP Warning: When using FSDP, several parameter groups will be conflated into
> a single one due to nested module wrapping and parameter flattening.
This is because parameter groups created before wrapping will have no meaning post wrapping due to parameter flattening of nested FSDP modules into 1D arrays (which can consume many layers).
For instance, below are the named parameters of an FSDP model on GPU 0 (When using 2 GPUs. Around 55M (110M/2) params in 1D arrays as this will have the 1st shard of the parameters).
Here, if one has applied no weight decay for [bias, LayerNorm.weight] the named parameters of an unwrapped BERT model,
it can't be applied to the below FSDP wrapped model as there are no named parameters with either of those strings and
the parameters of those layers are concatenated with parameters of various other layers.
```
{
'_fsdp_wrapped_module.flat_param': torch.Size([494209]),
'_fsdp_wrapped_module._fpw_module.bert.embeddings.word_embeddings._fsdp_wrapped_module.flat_param': torch.Size([11720448]),
'_fsdp_wrapped_module._fpw_module.bert.encoder._fsdp_wrapped_module.flat_param': torch.Size([42527232])
}
```
- In case of multiple models, it is necessary to prepare the models before creating optimizers or else it will throw an error.
Then pass the optimizers to the prepare call in the same order as corresponding models else `accelerator.save_state()` and `accelerator.load_state()` will result in wrong/unexpected behaviour.
- This feature is incompatible with `--predict_with_generate` in the `run_translation.py` script of 🤗 `Transformers` library.
For more control, users can leverage the `FullyShardedDataParallelPlugin`. After creating an instance of this class, users can pass it to the Accelerator class instantiation.
For more information on these options, please refer to the PyTorch [FullyShardedDataParallel](https://github.com/pytorch/pytorch/blob/0df2e863fbd5993a7b9e652910792bd21a516ff3/torch/distributed/fsdp/fully_sharded_data_parallel.py#L236) code.
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/big_modeling.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Handling big models for inference
When loading a pre-trained model in PyTorch, the usual workflow looks like this:
```py
import torch
my_model = ModelClass(...)
state_dict = torch.load(checkpoint_file)
my_model.load_state_dict(state_dict)
```
In plain English, those steps are:
1. Create the model with randomly initialized weights
2. Load the model weights (in a dictionary usually called a state dict) from the disk
3. Load those weights inside the model
While this works very well for regularly sized models, this workflow has some clear limitations when we deal with a huge model: in step 1, we load a full version of the model in RAM, and spend some time randomly initializing the weights (which will be discarded in step 3). In step 2, we load another full version of the model in RAM, with the pre-trained weights. If you're loading a model with 6 billion parameters, this means you will need 24GB of RAM for each copy of the model, so 48GB in total (half of it to load the model in FP16).
<Tip warning={true}>
This API is quite new and still in its experimental stage. While we strive to provide a stable API, it's possible some small parts of the public API will change in the future.
</Tip>
## How the Process Works: A Quick Overview
<Youtube id="MWCSGj9jEAo" />
## How the Process Works: Working with Code
### Instantiating an empty model
The first tool 🤗 Accelerate introduces to help with big models is a context manager [`init_empty_weights`] that helps you initialize a model without using any RAM so that step 1 can be done on models of any size. Here is how it works:
```py
from accelerate import init_empty_weights
with init_empty_weights():
my_model = ModelClass(...)
```
For instance:
```py
with init_empty_weights():
model = nn.Sequential(*[nn.Linear(10000, 10000) for _ in range(1000)])
```
initializes an empty model with a bit more than 100B parameters. Behind the scenes, this relies on the meta device introduced in PyTorch 1.9. During the initialization under the context manager, each time a parameter is created, it is instantly moved to that device.
<Tip warning={true}>
You can't move a model initialized like this on CPU or another device directly, since it doesn't have any data. It's also very likely that a forward pass with that empty model will fail, as not all operations are supported on the meta device.
</Tip>
### Sharded checkpoints
It's possible your model is so big that even a single copy won't fit in RAM. That doesn't mean it can't be loaded: if you have one or several GPUs, this is more memory available to store your model. In this case, it's better if your checkpoint is split into several smaller files that we call checkpoint shards.
🤗 Accelerate will handle sharded checkpoints as long as you follow the following format: your checkpoint should be in a folder, with several files containing the partial state dicts, and there should be an index in the JSON format that contains a dictionary mapping parameter names to the file containing their weights. You can easily shard your model with [`~Accelerator.save_model`]. For instance, we could have a folder containing:
```bash
first_state_dict.bin
index.json
second_state_dict.bin
```
with index.json being the following file:
```
{
"linear1.weight": "first_state_dict.bin",
"linear1.bias": "first_state_dict.bin",
"linear2.weight": "second_state_dict.bin",
"linear2.bias": "second_state_dict.bin"
}
```
and `first_state_dict.bin` containing the weights for `"linear1.weight"` and `"linear1.bias"`, `second_state_dict.bin` the ones for `"linear2.weight"` and `"linear2.bias"`
### Loading weights
The second tool 🤗 Accelerate introduces is a function [`load_checkpoint_and_dispatch`], that will allow you to load a checkpoint inside your empty model. This supports full checkpoints (a single file containing the whole state dict) as well as sharded checkpoints. It will also automatically dispatch those weights across the devices you have available (GPUs, CPU RAM), so if you are loading a sharded checkpoint, the maximum RAM usage will be the size of the biggest shard.
If you want to use big model inference with 🤗 Transformers models, check out this [documentation](https://huggingface.co/docs/transformers/main/en/main_classes/model#large-model-loading).
Here is how we can use this to load the [GPT2-1.5B](https://huggingface.co/marcsun13/gpt2-xl-linear-sharded) model.
Let's download the sharded version of this model.
```bash
pip install huggingface_hub
```
```py
from huggingface_hub import snapshot_download
checkpoint = "marcsun13/gpt2-xl-linear-sharded"
weights_location = snapshot_download(repo_id=checkpoint)
```
In order to initialize the model, we will use the library minGPT.
```bash
git clone https://github.com/karpathy/minGPT.git
pip install minGPT/
```
```py
from accelerate import init_empty_weights
from mingpt.model import GPT
model_config = GPT.get_default_config()
model_config.model_type = 'gpt2-xl'
model_config.vocab_size = 50257
model_config.block_size = 1024
with init_empty_weights():
model = GPT(model_config)
```
Then, load the checkpoint we just downloaded with:
```py
from accelerate import load_checkpoint_and_dispatch
model = load_checkpoint_and_dispatch(
model, checkpoint=weights_location, device_map="auto", no_split_module_classes=['Block']
)
```
By passing `device_map="auto"`, we tell 🤗 Accelerate to determine automatically where to put each layer of the model depending on the available resources:
- first, we use the maximum space available on the GPU(s)
- if we still need space, we store the remaining weights on the CPU
- if there is not enough RAM, we store the remaining weights on the hard drive as memory-mapped tensors
`no_split_module_classes=["Block"]` indicates that the modules that are `Block` should not be split on different devices. You should set here all blocks that include a residual connection of some kind.
You can see the `device_map` that 🤗 Accelerate picked by accessing the `hf_device_map` attribute of your model:
```py
model.hf_device_map
```
```python out
{'transformer.wte': 0,
'transformer.wpe': 0,
'transformer.drop': 0,
'transformer.h.0': 0,
'transformer.h.1': 0,
'transformer.h.2': 0,
'transformer.h.3': 0,
'transformer.h.4': 0,
'transformer.h.5': 0,
'transformer.h.6': 0,
'transformer.h.7': 0,
'transformer.h.8': 0,
'transformer.h.9': 0,
'transformer.h.10': 0,
'transformer.h.11': 0,
'transformer.h.12': 0,
'transformer.h.13': 0,
'transformer.h.14': 0,
'transformer.h.15': 0,
'transformer.h.16': 0,
'transformer.h.17': 0,
'transformer.h.18': 0,
'transformer.h.19': 0,
'transformer.h.20': 0,
'transformer.h.21': 0,
'transformer.h.22': 1,
'transformer.h.23': 1,
'transformer.h.24': 1,
'transformer.h.25': 1,
'transformer.h.26': 1,
'transformer.h.27': 1,
'transformer.h.28': 1,
'transformer.h.29': 1,
'transformer.h.30': 1,
'transformer.h.31': 1,
'transformer.h.32': 1,
'transformer.h.33': 1,
'transformer.h.34': 1,
'transformer.h.35': 1,
'transformer.h.36': 1,
'transformer.h.37': 1,
'transformer.h.38': 1,
'transformer.h.39': 1,
'transformer.h.40': 1,
'transformer.h.41': 1,
'transformer.h.42': 1,
'transformer.h.43': 1,
'transformer.h.44': 1,
'transformer.h.45': 1,
'transformer.h.46': 1,
'transformer.h.47': 1,
'transformer.ln_f': 1,
'lm_head': 1}
```
You can also design your `device_map` yourself if you prefer to explicitly decide where each layer should be. In this case, the command above becomes:
```py
model = load_checkpoint_and_dispatch(model, checkpoint=weights_location, device_map=my_device_map)
```
### Run the model
Now that we have done this, our model lies across several devices, and maybe the hard drive. But it can still be used as a regular PyTorch model:
```py
from mingpt.bpe import BPETokenizer
tokenizer = BPETokenizer()
inputs = tokenizer("Hello, my name is").to(0)
outputs = model.generate(x1, max_new_tokens=10, do_sample=False)[0]
tokenizer.decode(outputs.cpu().squeeze())
```
Behind the scenes, 🤗 Accelerate added hooks to the model, so that:
- at each layer, the inputs are put on the right device (so even if your model is spread across several GPUs, it works)
- for the weights offloaded on the CPU, they are put on a GPU just before the forward pass and cleaned up just after
- for the weights offloaded on the hard drive, they are loaded in RAM then put on a GPU just before the forward pass and cleaned up just after
This way, your model can run for inference even if it doesn't fit on one of the GPUs or the CPU RAM!
<Tip warning={true}>
This only supports the inference of your model, not training. Most of the computation happens behind `torch.no_grad()` context managers to avoid spending some GPU memory with intermediate activations.
</Tip>
### Designing a device map
You can let 🤗 Accelerate handle the device map computation by setting `device_map` to one of the supported options (`"auto"`, `"balanced"`, `"balanced_low_0"`, `"sequential"`) or create one yourself if you want more control over where each layer should go.
<Tip>
You can derive all sizes of the model (and thus compute a `device_map`) on a model that is on the meta device.
</Tip>
All the options will produce the same result when you don't have enough GPU memory to accommodate the whole model (which is to fit everything that can on the GPU, then offload weights on the CPU or even on the disk if there is not enough RAM).
When you have more GPU memory available than the model size, here is the difference between each option:
- `"auto"` and `"balanced"` evenly split the model on all available GPUs, making it possible for you to use a batch size greater than 1.
- `"balanced_low_0"` evenly splits the model on all GPUs except the first one, and only puts on GPU 0 what does not fit on the others. This option is great when you need to use GPU 0 for some processing of the outputs, like when using the `generate` function for Transformers models
- `"sequential"` will fit what it can on GPU 0, then move on GPU 1 and so forth (so won't use the last GPUs if it doesn't need to).
<Tip>
The options `"auto"` and `"balanced"` produce the same results for now, but the behavior of `"auto"` might change in the future if we find a strategy that makes more sense, while `"balanced"` will stay stable.
</Tip>
First note that you can limit the memory used on each GPU by using the `max_memory` argument (available in [`infer_auto_device_map`] and in all functions using it). When setting `max_memory`, you should pass along a dictionary containing the GPU identifiers (for instance `0`, `1` etc.) and the `"cpu"` key for the maximum RAM you want to use for CPU offload. The values can either be an integer (in bytes) or a string representing a number with its unit, such as `"10GiB"` or `"10GB"`.
Here is an example where we don't want to use more than 10GiB on each of the two GPUs and no more than 30GiB of CPU RAM for the model weights:
```python
from accelerate import infer_auto_device_map
device_map = infer_auto_device_map(my_model, max_memory={0: "10GiB", 1: "10GiB", "cpu": "30GiB"})
```
<Tip warning={true}>
When a first allocation happens in PyTorch, it loads CUDA kernels which take about 1-2GB of memory depending on the GPU. Therefore you always have less usable memory than the actual size of the GPU. To see how much memory is actually used do `torch.ones(1).cuda()` and look at the memory usage.
Therefore when you create memory maps with `max_memory` make sure to adjust the available memory accordingly to avoid out-of-memory errors.
</Tip>
Additionally, if you do some additional operations with your outputs without placing them back on the CPU (for instance inside the `generate` method of Transformers) and if you placed your inputs on a GPU, that GPU will consume more memory than the others (Accelerate always place the output back to the device of the input). Therefore if you would like to optimize the maximum batch size and you have many GPUs, give the first GPU less memory. For example, with BLOOM-176B on 8x80 A100 setup, the close-to-ideal map is:
```python
max_memory = {0: "30GIB", 1: "46GIB", 2: "46GIB", 3: "46GIB", 4: "46GIB", 5: "46GIB", 6: "46GIB", 7: "46GIB"}
```
as you can see we gave the remaining 7 GPUs ~50% more memory than GPU 0.
If you opt to fully design the `device_map` yourself, it should be a dictionary with keys being module names of your model and values being a valid device identifier (for instance an integer for the GPUs) or `"cpu"` for CPU offload, `"disk"` for disk offload. The keys need to cover the whole model, you can then define your device map as you wish: for instance, if your model has two blocks (let's say `block1` and `block2`) which each contain three linear layers (let's say `linear1`, `linear2` and `linear3`), a valid device map can be:
```python
device_map = {"block1": 0, "block2": 1}
```
another one that is valid could be:
```python
device_map = {"block1": 0, "block2.linear1": 0, "block2.linear2": 1, "block2.linear3": 1}
```
On the other hand, this one is not valid as it does not cover every parameter of the model:
```python
device_map = {"block1": 0, "block2.linear1": 1, "block2.linear2": 1}
```
<Tip>
To be the most efficient, make sure your device map puts the parameters on the GPUs in a sequential manner (e.g. don't put one of the first weights on GPU 0, then weights on GPU 1 and the last weight back to GPU 0) to avoid making many transfers of data between the GPUs.
</Tip>
## Limits and further development
We are aware of the current limitations in the API:
- While this could theoretically work on just one CPU with potential disk offload, you need at least one GPU to run this API. This will be fixed in further development.
- [`infer_auto_device_map`] (or `device_map="auto"` in [`load_checkpoint_and_dispatch`]) tries to maximize GPU and CPU RAM it sees available when you execute it. While PyTorch is very good at managing GPU RAM efficiently (and giving it back when not needed), it's not entirely true with Python and CPU RAM. Therefore, an automatically computed device map might be too intense on the CPU. Move a few modules to the disk device if you get crashes due to a lack of RAM.
- [`infer_auto_device_map`] (or `device_map="auto"` in [`load_checkpoint_and_dispatch`]) attributes devices sequentially (to avoid moving things back and forth) so if your first layer is bigger than the size of the GPU you have, it will end up with everything on the CPU/Disk.
- [`load_checkpoint_and_dispatch`] and [`load_checkpoint_in_model`] do not perform any check on the correctness of your state dict compared to your model at the moment (this will be fixed in a future version), so you may get some weird errors if trying to load a checkpoint with mismatched or missing keys.
- The model parallelism used when your model is split on several GPUs is naive and not optimized, meaning that only one GPU works at a given time and the other sits idle.
- When weights are offloaded on the CPU/hard drive, there is no pre-fetching (yet, we will work on this for future versions) which means the weights are put on the GPU when they are needed and not before.
- Hard-drive offloading might be very slow if the hardware you run on does not have fast communication between disk and CPU (like NVMes).
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/memory.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Memory Utilities
One of the most frustrating errors when it comes to running training scripts is hitting "CUDA Out-of-Memory",
as the entire script needs to be restarted, progress is lost, and typically a developer would want to simply
start their script and let it run.
`Accelerate` provides a utility heavily based on [toma](https://github.com/BlackHC/toma) to give this capability.
## find_executable_batch_size
This algorithm operates with exponential decay, decreasing the batch size in half after each failed run on some
training script. To use it, restructure your training function to include an inner function that includes this wrapper,
and build your dataloaders inside it. At a minimum, this could look like 4 new lines of code.
> Note: The inner function *must* take in the batch size as the first parameter, but we do not pass one to it when called. The wrapper handles this for us
It should also be noted that anything which will consume CUDA memory and passed to the `accelerator` **must** be declared inside the inner function,
such as models and optimizers.
```diff
def training_function(args):
accelerator = Accelerator()
+ @find_executable_batch_size(starting_batch_size=args.batch_size)
+ def inner_training_loop(batch_size):
+ nonlocal accelerator # Ensure they can be used in our context
+ accelerator.free_memory() # Free all lingering references
model = get_model()
model.to(accelerator.device)
optimizer = get_optimizer()
train_dataloader, eval_dataloader = get_dataloaders(accelerator, batch_size)
lr_scheduler = get_scheduler(
optimizer,
num_training_steps=len(train_dataloader)*num_epochs
)
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
train(model, optimizer, train_dataloader, lr_scheduler)
validate(model, eval_dataloader)
+ inner_training_loop()
```
To find out more, check the documentation [here](../package_reference/utilities#accelerate.find_executable_batch_size).
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/quantization.md
|
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Quantization
## `bitsandbytes` Integration
🤗 Accelerate brings `bitsandbytes` quantization to your model. You can now load any pytorch model in 8-bit or 4-bit with a few lines of code.
If you want to use 🤗 Transformers models with `bitsandbytes`, you should follow this [documentation](https://huggingface.co/docs/transformers/main_classes/quantization).
To learn more about how the `bitsandbytes` quantization works, check out the blog posts on [8-bit quantization](https://huggingface.co/blog/hf-bitsandbytes-integration) and [4-bit quantization](https://huggingface.co/blog/4bit-transformers-bitsandbytes).
### Pre-Requisites
You will need to install the following requirements:
- Install `bitsandbytes` library
```bash
pip install bitsandbytes
```
- Install latest `accelerate` from source
```bash
pip install git+https://github.com/huggingface/accelerate.git
```
- Install `minGPT` and `huggingface_hub` to run examples
```bash
git clone https://github.com/karpathy/minGPT.git
pip install minGPT/
pip install huggingface_hub
```
### How it works
First, we need to initialize our model. To save memory, we can initialize an empty model using the context manager [`init_empty_weights`].
Let's take the GPT2 model from minGPT library.
```py
from accelerate import init_empty_weights
from mingpt.model import GPT
model_config = GPT.get_default_config()
model_config.model_type = 'gpt2-xl'
model_config.vocab_size = 50257
model_config.block_size = 1024
with init_empty_weights():
empty_model = GPT(model_config)
```
Then, we need to get the path to the weights of your model. The path can be the state_dict file (e.g. "pytorch_model.bin") or a folder containing the sharded checkpoints.
```py
from huggingface_hub import snapshot_download
weights_location = snapshot_download(repo_id="marcsun13/gpt2-xl-linear-sharded")
```
Finally, you need to set your quantization configuration with [`~utils.BnbQuantizationConfig`].
Here's an example for 8-bit quantization:
```py
from accelerate.utils import BnbQuantizationConfig
quantization_config = BnbQuantizationConfig(load_in_8bit=True, llm_int8_threshold = 6)
```
Here's an example for 4-bit quantization:
```py
from accelerate.utils import BnbQuantizationConfig
quantization_config = BnbQuantizationConfig(load_in_4bit=True, bnb_4bit_compute_dtype=torch.bfloat16, bnb_4bit_use_double_quant=True, bnb_4bit_quant_type="nf4")
```
To quantize your empty model with the selected configuration, you need to use [`~utils.load_and_quantize_model`].
```py
from accelerate.utils import load_and_quantize_model
quantized_model = load_and_quantize_model(empty_model, weights_location=weights_location, quantization_config=quantization_config, device_map = "auto")
```
### Saving and loading 8-bit model
You can save your 8-bit model with accelerate using [`~Accelerator.save_model`].
```py
from accelerate import Accelerator
accelerate = Accelerator()
new_weights_location = "path/to/save_directory"
accelerate.save_model(quantized_model, new_weights_location)
quantized_model_from_saved = load_and_quantize_model(empty_model, weights_location=new_weights_location, quantization_config=quantization_config, device_map = "auto")
```
Note that 4-bit model serialization is currently not supported.
### Offload modules to cpu and disk
You can offload some modules to cpu/disk if you don't have enough space on the GPU to store the entire model on your GPUs.
This uses big model inference under the hood. Check this [documentation](https://huggingface.co/docs/accelerate/usage_guides/big_modeling) for more details.
For 8-bit quantization, the selected modules will be converted to 8-bit precision.
For 4-bit quantization, the selected modules will be kept in `torch_dtype` that the user passed in `BnbQuantizationConfig`. We will add support to convert these offloaded modules in 4-bit when 4-bit serialization will be possible.
You just need to pass a custom `device_map` in order to offload modules on cpu/disk. The offload modules will be dispatched on the GPU when needed. Here's an example :
```py
device_map = {
"transformer.wte": 0,
"transformer.wpe": 0,
"transformer.drop": 0,
"transformer.h": "cpu",
"transformer.ln_f": "disk",
"lm_head": "disk",
}
```
### Fine-tune a quantized model
It is not possible to perform pure 8bit or 4bit training on these models. However, you can train these models by leveraging parameter efficient fine tuning methods (PEFT) and train for example adapters on top of them. Please have a look at [peft](https://github.com/huggingface/peft) library for more details.
Currently, you can't add adapters on top of any quantized model. However, with the official support of adapters with 🤗 Transformers models, you can fine-tune quantized models. If you want to finetune a 🤗 Transformers model , follow this [documentation](https://huggingface.co/docs/transformers/main_classes/quantization) instead. Check out this [demo](https://colab.research.google.com/drive/1VoYNfYDKcKRQRor98Zbf2-9VQTtGJ24k?usp=sharing) on how to fine-tune a 4-bit 🤗 Transformers model.
Note that you don’t need to pass `device_map` when loading the model for training. It will automatically load your model on your GPU. Please note that `device_map=auto` should be used for inference only.
### Example demo - running GPT2 1.5b on a Google Colab
Check out the Google Colab [demo](https://colab.research.google.com/drive/1T1pOgewAWVpR9gKpaEWw4orOrzPFb3yM?usp=sharing) for running quantized models on a GTP2 model. The GPT2-1.5B model checkpoint is in FP32 which uses 6GB of memory. After quantization, it uses 1.6GB with 8-bit modules and 1.2GB with 4-bit modules.
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/distributed_inference.md
|
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Distributed Inference with 🤗 Accelerate
Distributed inference is a common use case, especially with natural language processing (NLP) models. Users often want to
send a number of different prompts, each to a different GPU, and then get the results back. This also has other cases
outside of just NLP, however for this tutorial we will focus on just this idea of each GPU receiving a different prompt,
and then returning the results.
## The Problem
Normally when doing this, users send the model to a specific device to load it from the CPU, and then move each prompt to a different device.
A basic pipeline using the `diffusers` library might look something like so:
```python
import torch
import torch.distributed as dist
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16)
```
Followed then by performing inference based on the specific prompt:
```python
def run_inference(rank, world_size):
dist.init_process_group("nccl", rank=rank, world_size=world_size)
pipe.to(rank)
if torch.distributed.get_rank() == 0:
prompt = "a dog"
elif torch.distributed.get_rank() == 1:
prompt = "a cat"
result = pipe(prompt).images[0]
result.save(f"result_{rank}.png")
```
One will notice how we have to check the rank to know what prompt to send, which can be a bit tedious.
A user might then also think that with 🤗 Accelerate, using the `Accelerator` to prepare a dataloader for such a task might also be
a simple way to manage this. (To learn more, check out the relvent section in the [Quick Tour](../quicktour#distributed-evaluation))
Can it manage it? Yes. Does it add unneeded extra code however: also yes.
## The Solution
With 🤗 Accelerate, we can simplify this process by using the [`Accelerator.split_between_processes`] context manager (which also exists in `PartialState` and `AcceleratorState`).
This function will automatically split whatever data you pass to it (be it a prompt, a set of tensors, a dictionary of the prior data, etc.) across all the processes (with a potential
to be padded) for you to use right away.
Let's rewrite the above example using this context manager:
```python
from accelerate import PartialState # Can also be Accelerator or AcceleratorState
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16)
distributed_state = PartialState()
pipe.to(distributed_state.device)
# Assume two processes
with distributed_state.split_between_processes(["a dog", "a cat"]) as prompt:
result = pipe(prompt).images[0]
result.save(f"result_{distributed_state.process_index}.png")
```
And then to launch the code, we can use the 🤗 Accelerate:
If you have generated a config file to be used using `accelerate config`:
```bash
accelerate launch distributed_inference.py
```
If you have a specific config file you want to use:
```bash
accelerate launch --config_file my_config.json distributed_inference.py
```
Or if don't want to make any config files and launch on two GPUs:
> Note: You will get some warnings about values being guessed based on your system. To remove these you can do `accelerate config default` or go through `accelerate config` to create a config file.
```bash
accelerate launch --num_processes 2 distributed_inference.py
```
We've now reduced the boilerplate code needed to split this data to a few lines of code quite easily.
But what if we have an odd distribution of prompts to GPUs? For example, what if we have 3 prompts, but only 2 GPUs?
Under the context manager, the first GPU would receive the first two prompts and the second GPU the third, ensuring that
all prompts are split and no overhead is needed.
*However*, what if we then wanted to do something with the results of *all the GPUs*? (Say gather them all and perform some kind of post processing)
You can pass in `apply_padding=True` to ensure that the lists of prompts are padded to the same length, with extra data being taken
from the last sample. This way all GPUs will have the same number of prompts, and you can then gather the results.
<Tip>
This is only needed when trying to perform an action such as gathering the results, where the data on each device
needs to be the same length. Basic inference does not require this.
</Tip>
For instance:
```python
from accelerate import PartialState # Can also be Accelerator or AcceleratorStaet
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16)
distributed_state = PartialState()
pipe.to(distributed_state.device)
# Assume two processes
with distributed_state.split_between_processes(["a dog", "a cat", "a chicken"], apply_padding=True) as prompt:
result = pipe(prompt).images
```
On the first GPU, the prompts will be `["a dog", "a cat"]`, and on the second GPU it will be `["a chicken", "a chicken"]`.
Make sure to drop the final sample, as it will be a duplicate of the previous one.
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/megatron_lm.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Megatron-LM
[Megatron-LM](https://github.com/NVIDIA/Megatron-LM) enables training large transformer language models at scale.
It provides efficient tensor, pipeline and sequence based model parallelism for pre-training transformer based
Language Models such as [GPT](https://arxiv.org/abs/2005.14165) (Decoder Only), [BERT](https://arxiv.org/pdf/1810.04805.pdf) (Encoder Only) and [T5](https://arxiv.org/abs/1910.10683) (Encoder-Decoder).
For detailed information and how things work behind the scene please refer the github [repo](https://github.com/NVIDIA/Megatron-LM).
## What is integrated?
Accelerate integrates following feature of Megatron-LM to enable large scale pre-training/finetuning
of BERT (Encoder), GPT (Decoder) or T5 models (Encoder and Decoder):
a. **Tensor Parallelism (TP)**: Reduces memory footprint without much additional communication on intra-node ranks.
Each tensor is split into multiple chunks with each shard residing on separate GPU. At each step, the same mini-batch of data is processed
independently and in parallel by each shard followed by syncing across all GPUs (`all-reduce` operation).
In a simple transformer layer, this leads to 2 `all-reduces` in the forward path and 2 in the backward path.
For more details, please refer research paper [Megatron-LM: Training Multi-Billion Parameter Language Models Using
Model Parallelism](https://arxiv.org/pdf/1909.08053.pdf) and
this section of 🤗 blogpost [The Technology Behind BLOOM Training](https://huggingface.co/blog/bloom-megatron-deepspeed#tensor-parallelism).
b. **Pipeline Parallelism (PP)**: Reduces memory footprint and enables large scale training via inter-node parallelization.
Reduces the bubble of naive PP via PipeDream-Flush schedule/1F1B schedule and Interleaved 1F1B schedule.
Layers are distributed uniformly across PP stages. For example, if a model has `24` layers and we have `4` GPUs for
pipeline parallelism, each GPU will have `6` layers (24/4). For more details on schedules to reduce the idle time of PP,
please refer to the research paper [Efficient Large-Scale Language Model Training on GPU Clusters
Using Megatron-LM](https://arxiv.org/pdf/2104.04473.pdf) and
this section of 🤗 blogpost [The Technology Behind BLOOM Training](https://huggingface.co/blog/bloom-megatron-deepspeed#pipeline-parallelism).
c. **Sequence Parallelism (SP)**: Reduces memory footprint without any additional communication. Only applicable when using TP.
It reduces activation memory required as it prevents the same copies to be on the tensor parallel ranks
post `all-reduce` by replacing then with `reduce-scatter` and `no-op` operation would be replaced by `all-gather`.
As `all-reduce = reduce-scatter + all-gather`, this saves a ton of activation memory at no added communication cost.
To put it simply, it shards the outputs of each transformer layer along sequence dimension, e.g.,
if the sequence length is `1024` and the TP size is `4`, each GPU will have `256` tokens (1024/4) for each sample.
This increases the batch size that can be supported for training. For more details, please refer to the research paper
[Reducing Activation Recomputation in Large Transformer Models](https://arxiv.org/pdf/2205.05198.pdf).
d. **Data Parallelism (DP)** via Distributed Optimizer: Reduces the memory footprint by sharding optimizer states and gradients across DP ranks
(versus the traditional method of replicating the optimizer state across data parallel ranks).
For example, when using Adam optimizer with mixed-precision training, each parameter accounts for 12 bytes of memory.
This gets distributed equally across the GPUs, i.e., each parameter would account for 3 bytes (12/4) if we have 4 GPUs.
For more details, please refer the research paper [ZeRO: Memory Optimizations Toward Training Trillion
Parameter Models](https://arxiv.org/pdf/1910.02054.pdf) and following section of 🤗 blog
[The Technology Behind BLOOM Training](https://huggingface.co/blog/bloom-megatron-deepspeed#zero-data-parallelism).
e. **Selective Activation Recomputation**: Reduces the memory footprint of activations significantly via smart activation checkpointing.
It doesn't store activations occupying large memory while being fast to recompute thereby achieving great tradeoff between memory and recomputation.
For example, for GPT-3, this leads to 70% reduction in required memory for activations at the expense of
only 2.7% FLOPs overhead for recomputation of activations. For more details, please refer to the research paper
[Reducing Activation Recomputation in Large Transformer Models](https://arxiv.org/pdf/2205.05198.pdf).
f. **Fused Kernels**: Fused Softmax, Mixed Precision Fused Layer Norm and Fused gradient accumulation to weight gradient computation of linear layer.
PyTorch JIT compiled Fused GeLU and Fused Bias+Dropout+Residual addition.
g. **Support for Indexed datasets**: Efficient binary format of datasets for large scale training. Support for the `mmap`, `cached` index file and the `lazy` loader format.
h. **Checkpoint reshaping and interoperability**: Utility for reshaping Megatron-LM checkpoints of variable
tensor and pipeline parallel sizes to the beloved 🤗 Transformers sharded checkpoints as it has great support with plethora of tools
such as 🤗 Accelerate Big Model Inference, Megatron-DeepSpeed Inference etc.
Support is also available for converting 🤗 Transformers sharded checkpoints to Megatron-LM checkpoint of variable tensor and pipeline parallel sizes
for large scale training.
## Pre-Requisites
You will need to install the latest pytorch, cuda, nccl, and NVIDIA [APEX](https://github.com/NVIDIA/apex#quick-start) releases and the nltk library.
See [documentation](https://github.com/NVIDIA/Megatron-LM#setup) for more details.
Another way to setup the environment is to pull an NVIDIA PyTorch Container that comes with all the required installations from NGC.
Below is a step-by-step method to set up the conda environment:
1. Create a virtual environment
```
conda create --name ml
```
2. Assuming that the machine has CUDA 11.3 installed, installing the corresponding PyTorch GPU Version
```
conda install pytorch torchvision torchaudio cudatoolkit=11.3 -c pytorch
```
3. Install Nvidia APEX
```
git clone https://github.com/NVIDIA/apex
cd apex
pip install -v --disable-pip-version-check --no-cache-dir --global-option="--cpp_ext" --global-option="--cuda_ext" ./
cd ..
```
4. Installing Megatron-LM
```
pip install git+https://github.com/huggingface/Megatron-LM.git
```
## Accelerate Megatron-LM Plugin
Important features are directly supported via the `accelerate config` command.
An example of thr corresponding questions for using Megatron-LM features is shown below:
```bash
:~$ accelerate config --config_file "megatron_gpt_config.yaml"
In which compute environment are you running? ([0] This machine, [1] AWS (Amazon SageMaker)): 0
Which type of machine are you using? ([0] No distributed training, [1] multi-CPU, [2] multi-GPU, [3] TPU): 2
How many different machines will you use (use more than 1 for multi-node training)? [1]:
Do you want to use DeepSpeed? [yes/NO]:
Do you want to use FullyShardedDataParallel? [yes/NO]:
Do you want to use Megatron-LM ? [yes/NO]: yes
What is the Tensor Parallelism degree/size? [1]:2
Do you want to enable Sequence Parallelism? [YES/no]:
What is the Pipeline Parallelism degree/size? [1]:2
What is the number of micro-batches? [1]:2
Do you want to enable selective activation recomputation? [YES/no]:
Do you want to use distributed optimizer which shards optimizer state and gradients across data pralellel ranks? [YES/no]:
What is the gradient clipping value based on global L2 Norm (0 to disable)? [1.0]:
How many GPU(s) should be used for distributed training? [1]:4
Do you wish to use FP16 or BF16 (mixed precision)? [NO/fp16/bf16]: bf16
```
The resulting config is shown below:
```
~$ cat megatron_gpt_config.yaml
compute_environment: LOCAL_MACHINE
deepspeed_config: {}
distributed_type: MEGATRON_LM
downcast_bf16: 'no'
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
megatron_lm_config:
megatron_lm_gradient_clipping: 1.0
megatron_lm_num_micro_batches: 2
megatron_lm_pp_degree: 2
megatron_lm_recompute_activations: true
megatron_lm_sequence_parallelism: true
megatron_lm_tp_degree: 2
megatron_lm_use_distributed_optimizer: true
mixed_precision: bf16
num_machines: 1
num_processes: 4
rdzv_backend: static
same_network: true
use_cpu: false
```
We will take the example of GPT pre-training. The minimal changes required to the official `run_clm_no_trainer.py`
to use Megatron-LM are as follows:
1. As Megatron-LM uses its own implementation of Optimizer, the corresponding scheduler compatible with it needs to be used.
As such, support for only the Megatron-LM's scheduler is present. User will need to create `accelerate.utils.MegatronLMDummyScheduler`.
Example is given below:
```python
from accelerate.utils import MegatronLMDummyScheduler
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
lr_scheduler = MegatronLMDummyScheduler(
optimizer=optimizer,
total_num_steps=args.max_train_steps,
warmup_num_steps=args.num_warmup_steps,
)
else:
lr_scheduler = get_scheduler(
name=args.lr_scheduler_type,
optimizer=optimizer,
num_warmup_steps=args.num_warmup_steps * args.gradient_accumulation_steps,
num_training_steps=args.max_train_steps * args.gradient_accumulation_steps,
)
```
2. Getting the details of the total batch size now needs to be cognization of tensor and pipeline parallel sizes.
Example of getting the effective total batch size is shown below:
```python
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
total_batch_size = accelerator.state.megatron_lm_plugin.global_batch_size
else:
total_batch_size = args.per_device_train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps
```
3. When using Megatron-LM, the losses are already averaged across the data parallel group
```python
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
losses.append(loss)
else:
losses.append(accelerator.gather_for_metrics(loss.repeat(args.per_device_eval_batch_size)))
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
losses = torch.tensor(losses)
else:
losses = torch.cat(losses)
```
4. For Megatron-LM, we need to save the model using `accelerator.save_state`
```python
if accelerator.distributed_type == DistributedType.MEGATRON_LM:
accelerator.save_state(args.output_dir)
else:
unwrapped_model = accelerator.unwrap_model(model)
unwrapped_model.save_pretrained(
args.output_dir, is_main_process=accelerator.is_main_process, save_function=accelerator.save
)
```
That's it! We are good to go 🚀. Please find the example script in the examples folder at the path `accelerate/examples/by_feature/megatron_lm_gpt_pretraining.py`.
Let's run it for `gpt-large` model architecture using 4 A100-80GB GPUs.
```bash
accelerate launch --config_file megatron_gpt_config.yaml \
examples/by_feature/megatron_lm_gpt_pretraining.py \
--config_name "gpt2-large" \
--tokenizer_name "gpt2-large" \
--dataset_name wikitext \
--dataset_config_name wikitext-2-raw-v1 \
--block_size 1024 \
--learning_rate 5e-5 \
--per_device_train_batch_size 24 \
--per_device_eval_batch_size 24 \
--num_train_epochs 5 \
--with_tracking \
--report_to "wandb" \
--output_dir "awesome_model"
```
Below are some important excerpts from the output logs:
```bash
Loading extension module fused_dense_cuda...
>>> done with compiling and loading fused kernels. Compilation time: 3.569 seconds
> padded vocab (size: 50257) with 175 dummy tokens (new size: 50432)
Building gpt model in the pre-training mode.
The Megatron LM model weights are initialized at random in `accelerator.prepare`. Please use `accelerator.load_checkpoint` to load a pre-trained checkpoint matching the distributed setup.
Preparing dataloader
Preparing dataloader
Preparing model
> number of parameters on (tensor, pipeline) model parallel rank (1, 0): 210753280
> number of parameters on (tensor, pipeline) model parallel rank (1, 1): 209445120
> number of parameters on (tensor, pipeline) model parallel rank (0, 0): 210753280
> number of parameters on (tensor, pipeline) model parallel rank (0, 1): 209445120
Preparing optimizer
Preparing scheduler
> learning rate decay style: linear
10/10/2022 22:57:22 - INFO - __main__ - ***** Running training *****
10/10/2022 22:57:22 - INFO - __main__ - Num examples = 2318
10/10/2022 22:57:22 - INFO - __main__ - Num Epochs = 5
10/10/2022 22:57:22 - INFO - __main__ - Instantaneous batch size per device = 24
10/10/2022 22:57:22 - INFO - __main__ - Total train batch size (w. parallel, distributed & accumulation) = 48
10/10/2022 22:57:22 - INFO - __main__ - Gradient Accumulation steps = 1
10/10/2022 22:57:22 - INFO - __main__ - Total optimization steps = 245
20%|████████████▍ | 49/245 [01:04<04:09, 1.27s/it]
10/10/2022 22:58:29 - INFO - __main__ - epoch 0: perplexity: 1222.1594275215962 eval_loss: 7.10837459564209
40%|████████████████████████▊ | 98/245 [02:10<03:07, 1.28s/it]
10/10/2022 22:59:35 - INFO - __main__ - epoch 1: perplexity: 894.5236583794557 eval_loss: 6.796291351318359
60%|████████████████████████████████████▌ | 147/245 [03:16<02:05, 1.28s/it]
10/10/2022 23:00:40 - INFO - __main__ - epoch 2: perplexity: 702.8458788508042 eval_loss: 6.555137634277344
80%|████████████████████████████████████████████████▊ | 196/245 [04:22<01:02, 1.28s/it]
10/10/2022 23:01:46 - INFO - __main__ - epoch 3: perplexity: 600.3220028695281 eval_loss: 6.39746618270874
100%|█████████████████████████████████████████████████████████████| 245/245 [05:27<00:00, 1.28s/it]
```
There are a large number of other options/features that one can set using `accelerate.utils.MegatronLMPlugin`.
## Advanced features to leverage writing custom train step and Megatron-LM Indexed Datasets
For leveraging more features, please go through below details.
1. Below is an example of changes required to customize the Train Step while using Megatron-LM.
You will implement the `accelerate.utils.AbstractTrainStep` or inherit from their corresponding children
`accelerate.utils.GPTTrainStep`, `accelerate.utils.BertTrainStep` or `accelerate.utils.T5TrainStep`.
```python
from accelerate.utils import MegatronLMDummyScheduler, GPTTrainStep, avg_losses_across_data_parallel_group
# Custom loss function for the Megatron model
class GPTTrainStepWithCustomLoss(GPTTrainStep):
def __init__(self, megatron_args, **kwargs):
super().__init__(megatron_args)
self.kwargs = kwargs
def get_loss_func(self):
def loss_func(inputs, loss_mask, output_tensor):
batch_size, seq_length = output_tensor.shape
losses = output_tensor.float()
loss_mask = loss_mask.view(-1).float()
loss = losses.view(-1) * loss_mask
# Resize and average loss per sample
loss_per_sample = loss.view(batch_size, seq_length).sum(axis=1)
loss_mask_per_sample = loss_mask.view(batch_size, seq_length).sum(axis=1)
loss_per_sample = loss_per_sample / loss_mask_per_sample
# Calculate and scale weighting
weights = torch.stack([(inputs == kt).float() for kt in self.kwargs["keytoken_ids"]]).sum(axis=[0, 2])
weights = 1.0 + self.kwargs["alpha"] * weights
# Calculate weighted average
weighted_loss = (loss_per_sample * weights).mean()
# Reduce loss across data parallel groups
averaged_loss = avg_losses_across_data_parallel_group([weighted_loss])
return weighted_loss, {"lm loss": averaged_loss[0]}
return loss_func
def get_forward_step_func(self):
def forward_step(data_iterator, model):
"""Forward step."""
# Get the batch.
tokens, labels, loss_mask, attention_mask, position_ids = self.get_batch(data_iterator)
output_tensor = model(tokens, position_ids, attention_mask, labels=labels)
return output_tensor, partial(self.loss_func, tokens, loss_mask)
return forward_step
def main():
# Custom loss function for the Megatron model
keytoken_ids = []
keywords = ["plt", "pd", "sk", "fit", "predict", " plt", " pd", " sk", " fit", " predict"]
for keyword in keywords:
ids = tokenizer([keyword]).input_ids[0]
if len(ids) == 1:
keytoken_ids.append(ids[0])
accelerator.print(f"Keytoken ids: {keytoken_ids}")
accelerator.state.megatron_lm_plugin.custom_train_step_class = GPTTrainStepWithCustomLoss
accelerator.state.megatron_lm_plugin.custom_train_step_kwargs = {
"keytoken_ids": keytoken_ids,
"alpha": 0.25,
}
```
2. For using the Megatron-LM datasets, a few more changes are required. Dataloaders for these datasets
are available only on rank 0 of each tensor parallel group. As such, there are rank where dataloader won't be
avaiable and this requires tweaks to the training loop. Being able to do all this shows how
felixble and extensible 🤗 Accelerate is. The changes required are as follows.
a. For Megatron-LM indexed datasets, we need to use `MegatronLMDummyDataLoader`
and pass the required dataset args to it such as `data_path`, `seq_length` etc.
See [here](https://github.com/NVIDIA/Megatron-LM/blob/main/megatron/arguments.py#L804) for the list of available args.
```python
from accelerate.utils import MegatronLMDummyDataLoader
megatron_dataloader_config = {
"data_path": args.data_path,
"splits_string": args.splits_string,
"seq_length": args.block_size,
"micro_batch_size": args.per_device_train_batch_size,
}
megatron_dataloader = MegatronLMDummyDataLoader(**megatron_dataloader_config)
accelerator.state.megatron_lm_plugin.megatron_dataset_flag = True
```
b. `megatron_dataloader` is repeated 3 times to get training, validation and test dataloaders
as per the `args.splits_string` proportions
```python
model, optimizer, lr_scheduler, train_dataloader, eval_dataloader, _ = accelerator.prepare(
model, optimizer, lr_scheduler, megatron_dataloader, megatron_dataloader, megatron_dataloader
)
```
c. Changes to training and evaluation loops as dataloader is only available on tensor parallel ranks 0
So, we need to iterate only if the dataloader isn't `None` else provide empty dict
As such, we loop using `while` loop and break when `completed_steps` is equal to `args.max_train_steps`
This is similar to the Megatron-LM setup wherein user has to provide `max_train_steps` when using Megaton-LM indexed datasets.
This displays how flexible and extensible 🤗 Accelerate is.
```python
while completed_steps < args.max_train_steps:
model.train()
batch = next(train_dataloader) if train_dataloader is not None else {}
outputs = model(**batch)
loss = outputs.loss
...
if completed_steps % eval_interval == 0:
eval_completed_steps = 0
losses = []
while eval_completed_steps < eval_iters:
model.eval()
with torch.no_grad():
batch = next(eval_dataloader) if eval_dataloader is not None else {}
outputs = model(**batch)
```
## Utility for Checkpoint reshaping and interoperability
1. The scripts for these are present in 🤗 Transformers library under respective models.
Currently, it is available for GPT model [checkpoint_reshaping_and_interoperability.py](https://github.com/huggingface/transformers/blob/main/src/transformers/models/megatron_gpt2/checkpoint_reshaping_and_interoperability.py)
2. Below is an example of conversion of checkpoint from Megatron-LM to universal 🤗 Transformers sharded checkpoint.
```bash
python checkpoint_reshaping_and_interoperability.py \
--convert_checkpoint_from_megatron_to_transformers \
--load_path "gpt/iter_0005000" \
--save_path "gpt/trfs_checkpoint" \
--max_shard_size "200MB" \
--tokenizer_name "gpt2" \
--print-checkpoint-structure
```
3. Conversion of checkpoint from transformers to megatron with `tp_size=2`, `pp_size=2` and `dp_size=2`.
```bash
python checkpoint_utils/megatgron_gpt2/checkpoint_reshaping_and_interoperability.py \
--load_path "gpt/trfs_checkpoint" \
--save_path "gpt/megatron_lm_checkpoint" \
--target_tensor_model_parallel_size 2 \
--target_pipeline_model_parallel_size 2 \
--target_data_parallel_size 2 \
--target_params_dtype "bf16" \
--make_vocab_size_divisible_by 128 \
--use_distributed_optimizer \
--print-checkpoint-structure
```
## Megatron-LM GPT models support returning logits and `megatron_generate` function for text generation
1. Returning logits require setting `require_logits=True` in MegatronLMPlugin as shown below.
These would be available on the in the last stage of pipeline.
```python
megatron_lm_plugin = MegatronLMPlugin(return_logits=True)
```
2. `megatron_generate` method for Megatron-LM GPT model: This will use Tensor and Pipeline Parallelism to complete
generations for a batch of inputs when using greedy with/without top_k/top_p sampling and for individual prompt inputs when using beam search decoding.
Only a subset of features of transformers generate is supported. This will help in using large models via tensor and pipeline parallelism
for generation (already does key-value caching and uses fused kernels by default).
This requires data parallel size to be 1, sequence parallelism and activation checkpointing to be disabled.
It also requires specifying path to tokenizer's vocab file and merges file.
Below example shows how to configure and use `megatron_generate` method for Megatron-LM GPT model.
```python
# specifying tokenizer's vocab and merges file
vocab_file = os.path.join(args.resume_from_checkpoint, "vocab.json")
merge_file = os.path.join(args.resume_from_checkpoint, "merges.txt")
other_megatron_args = {"vocab_file": vocab_file, "merge_file": merge_file}
megatron_lm_plugin = MegatronLMPlugin(other_megatron_args=other_megatron_args)
# inference using `megatron_generate` functionality
tokenizer.pad_token = tokenizer.eos_token
max_new_tokens = 64
batch_texts = [
"Are you human?",
"The purpose of life is",
"The arsenal was constructed at the request of",
"How are you doing these days?",
]
batch_encodings = tokenizer(batch_texts, return_tensors="pt", padding=True)
# top-p sampling
generated_tokens = model.megatron_generate(
batch_encodings["input_ids"],
batch_encodings["attention_mask"],
max_new_tokens=max_new_tokens,
top_p=0.8,
top_p_decay=0.5,
temperature=0.9,
)
decoded_preds = tokenizer.batch_decode(generated_tokens.cpu().numpy())
accelerator.print(decoded_preds)
# top-k sampling
generated_tokens = model.megatron_generate(
batch_encodings["input_ids"],
batch_encodings["attention_mask"],
max_new_tokens=max_new_tokens,
top_k=50,
temperature=0.9,
)
decoded_preds = tokenizer.batch_decode(generated_tokens.cpu().numpy())
accelerator.print(decoded_preds)
# adding `bos` token at the start
generated_tokens = model.megatron_generate(
batch_encodings["input_ids"], batch_encodings["attention_mask"], max_new_tokens=max_new_tokens, add_BOS=True
)
decoded_preds = tokenizer.batch_decode(generated_tokens.cpu().numpy())
accelerator.print(decoded_preds)
# beam search => only takes single prompt
batch_texts = ["The purpose of life is"]
batch_encodings = tokenizer(batch_texts, return_tensors="pt", padding=True)
generated_tokens = model.megatron_generate(
batch_encodings["input_ids"],
batch_encodings["attention_mask"],
max_new_tokens=max_new_tokens,
num_beams=20,
length_penalty=1.5,
)
decoded_preds = tokenizer.batch_decode(generated_tokens.cpu().numpy())
accelerator.print(decoded_preds)
```
3. An end-to-end example of using `megatron_generate` method for Megatron-LM GPT model is available at
[megatron_gpt2_generation.py](https://github.com/pacman100/accelerate-megatron-test/blob/main/src/inference/megatron_gpt2_generation.py) with
config file [megatron_lm_gpt_generate_config.yaml](https://github.com/pacman100/accelerate-megatron-test/blob/main/src/Configs/megatron_lm_gpt_generate_config.yaml).
The bash script with accelerate launch command is available at [megatron_lm_gpt_generate.sh](https://github.com/pacman100/accelerate-megatron-test/blob/main/megatron_lm_gpt_generate.sh).
The output logs of the script are available at [megatron_lm_gpt_generate.log](https://github.com/pacman100/accelerate-megatron-test/blob/main/output_logs/megatron_lm_gpt_generate.log).
## Support for ROPE and ALiBi Positional embeddings and Multi-Query Attention
1. For ROPE/ALiBi attention, pass `position_embedding_type` with `("absolute" | "rotary" | "alibi")` to `MegatronLMPlugin` as shown below.
```python
other_megatron_args = {"position_embedding_type": "alibi"}
megatron_lm_plugin = MegatronLMPlugin(other_megatron_args=other_megatron_args)
```
2. For Multi-Query Attention, pass `attention_head_type` with `("multihead" | "multiquery")` to `MegatronLMPlugin` as shown below.
```python
other_megatron_args = {"attention_head_type": "multiquery"}
megatron_lm_plugin = MegatronLMPlugin(other_megatron_args=other_megatron_args)
```
## Caveats
1. Supports Transformers GPT2, Megatron-BERT and T5 models.
This covers Decoder only, Encode only and Encoder-Decoder model classes.
2. Only loss is returned from model forward pass as
there is quite complex interplay of pipeline, tensor and data parallelsim behind the scenes.
The `model(**batch_data)` call return loss(es) averaged across the data parallel ranks.
This is fine for most cases wherein pre-training jobs are run using Megatron-LM features and
you can easily compute the `perplexity` using the loss.
For GPT model, returning logits in addition to loss(es) is supported.
These logits aren't gathered across data prallel ranks. Use `accelerator.utils.gather_across_data_parallel_groups`
to gather logits across data parallel ranks. These logits along with labels can be used for computing various
performance metrics.
3. The main process is the last rank as the losses/logits are available in the last stage of pipeline.
`accelerator.is_main_process` and `accelerator.is_local_main_process` return `True` for last rank when using
Megatron-LM integration.
4. In `accelerator.prepare` call, a Megatron-LM model corresponding to a given Transformers model is created
with random weights. Please use `accelerator.load_state` to load the Megatron-LM checkpoint with matching TP, PP and DP partitions.
5. Currently, checkpoint reshaping and interoperability support is only available for GPT.
Soon it will be extended to BERT and T5.
6. `gradient_accumulation_steps` needs to be 1. When using Megatron-LM, micro batches in pipeline parallelism
setting is synonymous with gradient accumulation.
7. When using Megatron-LM, use `accelerator.save_state` and `accelerator.load_state` for saving and loading checkpoints.
8. Below are the mapping from Megatron-LM model architectures to the the equivalent 🤗 transformers model architectures.
Only these 🤗 transformers model architectures are supported.
a. Megatron-LM [BertModel](https://github.com/NVIDIA/Megatron-LM/blob/main/megatron/model/bert_model.py) :
🤗 transformers models with `megatron-bert` in config's model type, e.g.,
[MegatronBERT](https://huggingface.co/docs/transformers/model_doc/megatron-bert)
b. Megatron-LM [GPTModel](https://github.com/NVIDIA/Megatron-LM/blob/main/megatron/model/gpt_model.py) :
🤗 transformers models with `gpt2` in config's model type, e.g.,
[OpenAI GPT2](https://huggingface.co/docs/transformers/model_doc/gpt2)
c. Megatron-LM [T5Model](https://github.com/NVIDIA/Megatron-LM/blob/main/megatron/model/t5_model.py) :
🤗 transformers models with `t5` in config's model type, e.g.,
[T5](https://huggingface.co/docs/transformers/model_doc/t5) and
[MT5](https://huggingface.co/docs/transformers/model_doc/mt5)
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/deepspeed.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# DeepSpeed
[DeepSpeed](https://github.com/microsoft/DeepSpeed) implements everything described in the [ZeRO paper](https://arxiv.org/abs/1910.02054). Currently, it provides full support for:
1. Optimizer state partitioning (ZeRO stage 1)
2. Gradient partitioning (ZeRO stage 2)
3. Parameter partitioning (ZeRO stage 3)
4. Custom mixed precision training handling
5. A range of fast CUDA-extension-based optimizers
6. ZeRO-Offload to CPU and Disk/NVMe
ZeRO-Offload has its own dedicated paper: [ZeRO-Offload: Democratizing Billion-Scale Model Training](https://arxiv.org/abs/2101.06840). And NVMe-support is described in the paper [ZeRO-Infinity: Breaking the GPU
Memory Wall for Extreme Scale Deep Learning](https://arxiv.org/abs/2104.07857).
DeepSpeed ZeRO-2 is primarily used only for training, as its features are of no use to inference.
DeepSpeed ZeRO-3 can be used for inference as well since it allows huge models to be loaded on multiple GPUs, which
won't be possible on a single GPU.
🤗 Accelerate integrates [DeepSpeed](https://github.com/microsoft/DeepSpeed) via 2 options:
1. Integration of the DeepSpeed features via `deepspeed config file` specification in `accelerate config` . You just supply your custom config file or use our template. Most of
this document is focused on this feature. This supports all the core features of DeepSpeed and gives user a lot of flexibility.
User may have to change a few lines of code depending on the config.
2. Integration via `deepspeed_plugin`.This supports subset of the DeepSpeed features and uses default options for the rest of the configurations.
User need not change any code and is good for those who are fine with most of the default settings of DeepSpeed.
## What is integrated?
Training:
1. DeepSpeed ZeRO training supports the full ZeRO stages 1, 2 and 3 as well as CPU/Disk offload of optimizer states, gradients and parameters.
Below is a short description of Data Parallelism using ZeRO - Zero Redundancy Optimizer along with diagram from this [blog post](https://www.microsoft.com/en-us/research/blog/zero-deepspeed-new-system-optimizations-enable-training-models-with-over-100-billion-parameters/)
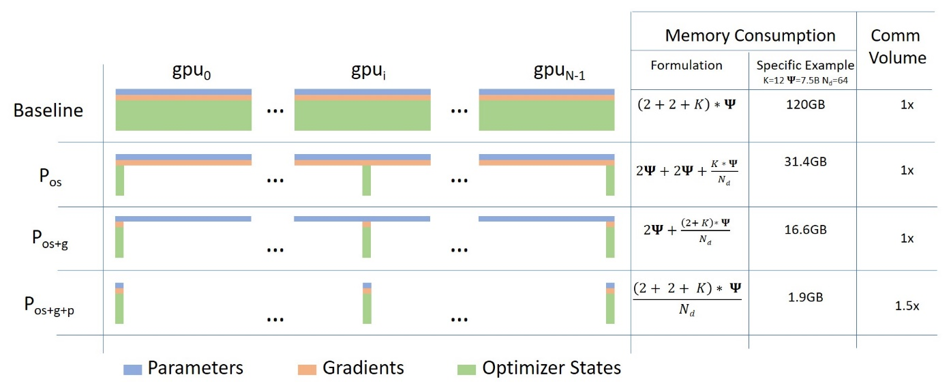
(Source: [link](https://www.microsoft.com/en-us/research/blog/zero-deepspeed-new-system-optimizations-enable-training-models-with-over-100-billion-parameters/))
a. **Stage 1** : Shards optimizer states across data parallel workers/GPUs
b. **Stage 2** : Shards optimizer states + gradients across data parallel workers/GPUs
c. **Stage 3**: Shards optimizer states + gradients + model parameters across data parallel workers/GPUs
d. **Optimizer Offload**: Offloads the gradients + optimizer states to CPU/Disk building on top of ZERO Stage 2
e. **Param Offload**: Offloads the model parameters to CPU/Disk building on top of ZERO Stage 3
<u>Note</u>: With respect to Disk Offload, the disk should be an NVME for decent speed but it technically works on any Disk
Inference:
1. DeepSpeed ZeRO Inference supports ZeRO stage 3 with ZeRO-Infinity. It uses the same ZeRO protocol as training, but
it doesn't use an optimizer and a lr scheduler and only stage 3 is relevant. For more details see:
[deepspeed-zero-inference](#deepspeed-zero-inference).
## How it works?
**Pre-Requisites**: Install DeepSpeed version >=0.6.5. Please refer to the [DeepSpeed Installation details](https://github.com/microsoft/DeepSpeed#installation)
for more information.
We will first look at easy to use integration via `accelerate config`.
Followed by more flexible and feature rich `deepspeed config file` integration.
### Accelerate DeepSpeed Plugin
On your machine(s) just run:
```bash
accelerate config
```
and answer the questions asked. It will ask whether you want to use a config file for DeepSpeed to which you should answer no. Then answer the following questions to generate a basic DeepSpeed config.
This will generate a config file that will be used automatically to properly set the
default options when doing
```bash
accelerate launch my_script.py --args_to_my_script
```
For instance, here is how you would run the NLP example `examples/nlp_example.py` (from the root of the repo) with DeepSpeed Plugin:
**ZeRO Stage-2 DeepSpeed Plugin Example**
```bash
compute_environment: LOCAL_MACHINE
deepspeed_config:
gradient_accumulation_steps: 1
gradient_clipping: 1.0
offload_optimizer_device: none
offload_param_device: none
zero3_init_flag: true
zero_stage: 2
distributed_type: DEEPSPEED
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: fp16
num_machines: 1
num_processes: 2
use_cpu: false
```
```bash
accelerate launch examples/nlp_example.py --mixed_precision fp16
```
**ZeRO Stage-3 with CPU Offload DeepSpeed Plugin Example**
```bash
compute_environment: LOCAL_MACHINE
deepspeed_config:
gradient_accumulation_steps: 1
gradient_clipping: 1.0
offload_optimizer_device: cpu
offload_param_device: cpu
zero3_init_flag: true
zero3_save_16bit_model: true
zero_stage: 3
distributed_type: DEEPSPEED
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: fp16
num_machines: 1
num_processes: 2
use_cpu: false
```
```bash
accelerate launch examples/nlp_example.py --mixed_precision fp16
```
Currently, `Accelerate` supports following config through the CLI:
```bash
`zero_stage`: [0] Disabled, [1] optimizer state partitioning, [2] optimizer+gradient state partitioning and [3] optimizer+gradient+parameter partitioning
`gradient_accumulation_steps`: Number of training steps to accumulate gradients before averaging and applying them.
`gradient_clipping`: Enable gradient clipping with value.
`offload_optimizer_device`: [none] Disable optimizer offloading, [cpu] offload optimizer to CPU, [nvme] offload optimizer to NVMe SSD. Only applicable with ZeRO >= Stage-2.
`offload_param_device`: [none] Disable parameter offloading, [cpu] offload parameters to CPU, [nvme] offload parameters to NVMe SSD. Only applicable with ZeRO Stage-3.
`zero3_init_flag`: Decides whether to enable `deepspeed.zero.Init` for constructing massive models. Only applicable with ZeRO Stage-3.
`zero3_save_16bit_model`: Decides whether to save 16-bit model weights when using ZeRO Stage-3.
`mixed_precision`: `no` for FP32 training, `fp16` for FP16 mixed-precision training and `bf16` for BF16 mixed-precision training.
```
To be able to tweak more options, you will need to use a DeepSpeed config file.
### DeepSpeed Config File
On your machine(s) just run:
```bash
accelerate config
```
and answer the questions asked. It will ask whether you want to use a config file for deepspeed to which you answer yes
and provide the path to the deepspeed config file.
This will generate a config file that will be used automatically to properly set the
default options when doing
```bash
accelerate launch my_script.py --args_to_my_script
```
For instance, here is how you would run the NLP example `examples/by_feature/deepspeed_with_config_support.py` (from the root of the repo) with DeepSpeed Config File:
**ZeRO Stage-2 DeepSpeed Config File Example**
```bash
compute_environment: LOCAL_MACHINE
deepspeed_config:
deepspeed_config_file: /home/ubuntu/accelerate/examples/configs/deepspeed_config_templates/zero_stage2_config.json
zero3_init_flag: true
distributed_type: DEEPSPEED
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: fp16
num_machines: 1
num_processes: 2
use_cpu: false
```
with the contents of `zero_stage2_config.json` being:
```json
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto",
"torch_adam": true,
"adam_w_mode": true
}
},
"scheduler": {
"type": "WarmupDecayLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto",
"total_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 2,
"allgather_partitions": true,
"allgather_bucket_size": 2e8,
"overlap_comm": true,
"reduce_scatter": true,
"reduce_bucket_size": "auto",
"contiguous_gradients": true
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
```
```bash
accelerate launch examples/by_feature/deepspeed_with_config_support.py \
--config_name "gpt2-large" \
--tokenizer_name "gpt2-large" \
--dataset_name "wikitext" \
--dataset_config_name "wikitext-2-raw-v1" \
--block_size 128 \
--output_dir "./clm/clm_deepspeed_stage2_accelerate" \
--learning_rate 5e-4 \
--per_device_train_batch_size 24 \
--per_device_eval_batch_size 24 \
--num_train_epochs 3 \
--with_tracking \
--report_to "wandb"\
```
**ZeRO Stage-3 with CPU offload DeepSpeed Config File Example**
```bash
compute_environment: LOCAL_MACHINE
deepspeed_config:
deepspeed_config_file: /home/ubuntu/accelerate/examples/configs/deepspeed_config_templates/zero_stage3_offload_config.json
zero3_init_flag: true
distributed_type: DEEPSPEED
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: fp16
num_machines: 1
num_processes: 2
use_cpu: false
```
with the contents of `zero_stage3_offload_config.json` being:
```json
{
"fp16": {
"enabled": true,
"loss_scale": 0,
"loss_scale_window": 1000,
"initial_scale_power": 16,
"hysteresis": 2,
"min_loss_scale": 1
},
"optimizer": {
"type": "AdamW",
"params": {
"lr": "auto",
"weight_decay": "auto"
}
},
"scheduler": {
"type": "WarmupDecayLR",
"params": {
"warmup_min_lr": "auto",
"warmup_max_lr": "auto",
"warmup_num_steps": "auto",
"total_num_steps": "auto"
}
},
"zero_optimization": {
"stage": 3,
"offload_optimizer": {
"device": "cpu",
"pin_memory": true
},
"offload_param": {
"device": "cpu",
"pin_memory": true
},
"overlap_comm": true,
"contiguous_gradients": true,
"reduce_bucket_size": "auto",
"stage3_prefetch_bucket_size": "auto",
"stage3_param_persistence_threshold": "auto",
"sub_group_size": 1e9,
"stage3_max_live_parameters": 1e9,
"stage3_max_reuse_distance": 1e9,
"stage3_gather_16bit_weights_on_model_save": "auto"
},
"gradient_accumulation_steps": 1,
"gradient_clipping": "auto",
"steps_per_print": 2000,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"wall_clock_breakdown": false
}
```
```bash
accelerate launch examples/by_feature/deepspeed_with_config_support.py \
--config_name "gpt2-large" \
--tokenizer_name "gpt2-large" \
--dataset_name "wikitext" \
--dataset_config_name "wikitext-2-raw-v1" \
--block_size 128 \
--output_dir "./clm/clm_deepspeed_stage3_offload_accelerate" \
--learning_rate 5e-4 \
--per_device_train_batch_size 32 \
--per_device_eval_batch_size 32 \
--num_train_epochs 3 \
--with_tracking \
--report_to "wandb"\
```
**Important code changes when using DeepSpeed Config File**
1. DeepSpeed Optimizers and Schedulers. For more information on these,
see the [DeepSpeed Optimizers](https://deepspeed.readthedocs.io/en/latest/optimizers.html) and [DeepSpeed Schedulers](https://deepspeed.readthedocs.io/en/latest/schedulers.html) documentation.
We will look at the changes needed in the code when using these.
a. DS Optim + DS Scheduler: The case when both `optimizer` and `scheduler` keys are present in the DeepSpeed config file.
In this situation, those will be used and the user has to use `accelerate.utils.DummyOptim` and `accelerate.utils.DummyScheduler` to replace the PyTorch/Custom optimizers and schedulers in their code.
Below is the snippet from `examples/by_feature/deepspeed_with_config_support.py` showing this:
```python
# Creates Dummy Optimizer if `optimizer` was spcified in the config file else creates Adam Optimizer
optimizer_cls = (
torch.optim.AdamW
if accelerator.state.deepspeed_plugin is None
or "optimizer" not in accelerator.state.deepspeed_plugin.deepspeed_config
else DummyOptim
)
optimizer = optimizer_cls(optimizer_grouped_parameters, lr=args.learning_rate)
# Creates Dummy Scheduler if `scheduler` was spcified in the config file else creates `args.lr_scheduler_type` Scheduler
if (
accelerator.state.deepspeed_plugin is None
or "scheduler" not in accelerator.state.deepspeed_plugin.deepspeed_config
):
lr_scheduler = get_scheduler(
name=args.lr_scheduler_type,
optimizer=optimizer,
num_warmup_steps=args.num_warmup_steps,
num_training_steps=args.max_train_steps,
)
else:
lr_scheduler = DummyScheduler(
optimizer, total_num_steps=args.max_train_steps, warmup_num_steps=args.num_warmup_steps
)
```
b. Custom Optim + Custom Scheduler: The case when both `optimizer` and `scheduler` keys are absent in the DeepSpeed config file.
In this situation, no code changes are needed from the user and this is the case when using integration via DeepSpeed Plugin.
In the above example we can see that the code remains unchanged if the `optimizer` and `scheduler` keys are absent in the DeepSpeed config file.
c. Custom Optim + DS Scheduler: The case when only `scheduler` key is present in the DeepSpeed config file.
In this situation, the user has to use `accelerate.utils.DummyScheduler` to replace the PyTorch/Custom scheduler in their code.
d. DS Optim + Custom Scheduler: The case when only `optimizer` key is present in the DeepSpeed config file.
This will result in an error because you can only use DS Scheduler when using DS Optim.
2. Notice the `auto` values in the above example DeepSpeed config files. These are automatically handled by `prepare` method
based on model, dataloaders, dummy optimizer and dummy schedulers provided to `prepare` method.
Only the `auto` fields specified in above examples are handled by `prepare` method and the rest have to be explicitly specified by the user.
**Things to note when using DeepSpeed Config File**
Below is a sample script using `deepspeed_config_file` in different scenarios.
Code `test.py`:
```python
from accelerate import Accelerator
from accelerate.state import AcceleratorState
def main():
accelerator = Accelerator()
accelerator.print(f"{AcceleratorState()}")
if __name__ == "__main__":
main()
```
**Scenario 1**: Manually tampered accelerate config file having `deepspeed_config_file` along with other entries.
1. Content of the `accelerate` config:
```yaml
command_file: null
commands: null
compute_environment: LOCAL_MACHINE
deepspeed_config:
gradient_accumulation_steps: 1
gradient_clipping: 1.0
offload_optimizer_device: 'cpu'
offload_param_device: 'cpu'
zero3_init_flag: true
zero3_save_16bit_model: true
zero_stage: 3
deepspeed_config_file: 'ds_config.json'
distributed_type: DEEPSPEED
downcast_bf16: 'no'
dynamo_backend: 'NO'
fsdp_config: {}
gpu_ids: null
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
megatron_lm_config: {}
num_machines: 1
num_processes: 2
rdzv_backend: static
same_network: true
tpu_name: null
tpu_zone: null
use_cpu: false
```
2. `ds_config.json`:
```json
{
"bf16": {
"enabled": true
},
"zero_optimization": {
"stage": 3,
"stage3_gather_16bit_weights_on_model_save": false,
"offload_optimizer": {
"device": "none"
},
"offload_param": {
"device": "none"
}
},
"gradient_clipping": 1.0,
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"gradient_accumulation_steps": 10,
"steps_per_print": 2000000
}
```
3. Output of `accelerate launch test.py`:
```bash
ValueError: When using `deepspeed_config_file`, the following accelerate config variables will be ignored:
['gradient_accumulation_steps', 'gradient_clipping', 'zero_stage', 'offload_optimizer_device', 'offload_param_device',
'zero3_save_16bit_model', 'mixed_precision'].
Please specify them appropriately in the DeepSpeed config file.
If you are using an accelerate config file, remove others config variables mentioned in the above specified list.
The easiest method is to create a new config following the questionnaire via `accelerate config`.
It will only ask for the necessary config variables when using `deepspeed_config_file`.
```
**Scenario 2**: Use the solution of the error to create new accelerate config and check that no ambiguity error is now thrown.
1. Run `accelerate config`:
```bash
$ accelerate config
-------------------------------------------------------------------------------------------------------------------------------
In which compute environment are you running?
This machine
-------------------------------------------------------------------------------------------------------------------------------
Which type of machine are you using?
multi-GPU
How many different machines will you use (use more than 1 for multi-node training)? [1]:
Do you wish to optimize your script with torch dynamo?[yes/NO]:
Do you want to use DeepSpeed? [yes/NO]: yes
Do you want to specify a json file to a DeepSpeed config? [yes/NO]: yes
Please enter the path to the json DeepSpeed config file: ds_config.json
Do you want to enable `deepspeed.zero.Init` when using ZeRO Stage-3 for constructing massive models? [yes/NO]: yes
How many GPU(s) should be used for distributed training? [1]:4
accelerate configuration saved at ds_config_sample.yaml
```
2. Content of the `accelerate` config:
```yaml
compute_environment: LOCAL_MACHINE
deepspeed_config:
deepspeed_config_file: ds_config.json
zero3_init_flag: true
distributed_type: DEEPSPEED
downcast_bf16: 'no'
dynamo_backend: 'NO'
fsdp_config: {}
machine_rank: 0
main_training_function: main
megatron_lm_config: {}
num_machines: 1
num_processes: 4
rdzv_backend: static
same_network: true
use_cpu: false
```
3. Output of `accelerate launch test.py`:
```bash
Distributed environment: DEEPSPEED Backend: nccl
Num processes: 4
Process index: 0
Local process index: 0
Device: cuda:0
Mixed precision type: bf16
ds_config: {'bf16': {'enabled': True}, 'zero_optimization': {'stage': 3, 'stage3_gather_16bit_weights_on_model_save': False, 'offload_optimizer': {'device': 'none'}, 'offload_param': {'device': 'none'}}, 'gradient_clipping': 1.0, 'train_batch_size': 'auto', 'train_micro_batch_size_per_gpu': 'auto', 'gradient_accumulation_steps': 10, 'steps_per_print': inf, 'fp16': {'enabled': False}}
```
**Scenario 3**: Setting the `accelerate launch` command arguments related to DeepSpeed as `"auto"` in the DeepSpeed` configuration file and check that things work as expected.
1. New `ds_config.json` with `"auto"` for the `accelerate launch` DeepSpeed command arguments:
```json
{
"bf16": {
"enabled": "auto"
},
"zero_optimization": {
"stage": "auto",
"stage3_gather_16bit_weights_on_model_save": "auto",
"offload_optimizer": {
"device": "auto"
},
"offload_param": {
"device": "auto"
}
},
"gradient_clipping": "auto",
"train_batch_size": "auto",
"train_micro_batch_size_per_gpu": "auto",
"gradient_accumulation_steps": "auto",
"steps_per_print": 2000000
}
```
2. Output of `accelerate launch --mixed_precision="fp16" --zero_stage=3 --gradient_accumulation_steps=5 --gradient_clipping=1.0 --offload_param_device="cpu" --offload_optimizer_device="nvme" --zero3_save_16bit_model="true" test.py`:
```bash
Distributed environment: DEEPSPEED Backend: nccl
Num processes: 4
Process index: 0
Local process index: 0
Device: cuda:0
Mixed precision type: fp16
ds_config: {'bf16': {'enabled': False}, 'zero_optimization': {'stage': 3, 'stage3_gather_16bit_weights_on_model_save': True, 'offload_optimizer': {'device': 'nvme'}, 'offload_param': {'device': 'cpu'}}, 'gradient_clipping': 1.0, 'train_batch_size': 'auto', 'train_micro_batch_size_per_gpu': 'auto', 'gradient_accumulation_steps': 5, 'steps_per_print': inf, 'fp16': {'enabled': True, 'auto_cast': True}}
```
**Note**: Remaining `"auto"` values are handled in `accelerator.prepare()` call as explained in point 2 of
`Important code changes when using DeepSpeed Config File`.
## Saving and loading
1. Saving and loading of models is unchanged for ZeRO Stage-1 and Stage-2.
2. under ZeRO Stage-3, `state_dict` contains just the placeholders since the model weights are partitioned across multiple GPUs.
ZeRO Stage-3 has 2 options:
a. Saving the entire 16bit model weights to directly load later on using `model.load_state_dict(torch.load(pytorch_model.bin))`.
For this, either set `zero_optimization.stage3_gather_16bit_weights_on_model_save` to True in DeepSpeed Config file or set
`zero3_save_16bit_model` to True in DeepSpeed Plugin.
**Note that this option requires consolidation of the weights on one GPU it can be slow and memory demanding, so only use this feature when needed.**
Below is the snippet from `examples/by_feature/deepspeed_with_config_support.py` showing this:
```python
unwrapped_model = accelerator.unwrap_model(model)
# New Code #
# Saves the whole/unpartitioned fp16 model when in ZeRO Stage-3 to the output directory if
# `stage3_gather_16bit_weights_on_model_save` is True in DeepSpeed Config file or
# `zero3_save_16bit_model` is True in DeepSpeed Plugin.
# For Zero Stages 1 and 2, models are saved as usual in the output directory.
# The model name saved is `pytorch_model.bin`
unwrapped_model.save_pretrained(
args.output_dir,
is_main_process=accelerator.is_main_process,
save_function=accelerator.save,
state_dict=accelerator.get_state_dict(model),
)
```
b. To get 32bit weights, first save the model using `model.save_checkpoint()`.
Below is the snippet from `examples/by_feature/deepspeed_with_config_support.py` showing this:
```python
success = model.save_checkpoint(PATH, ckpt_id, checkpoint_state_dict)
status_msg = "checkpointing: PATH={}, ckpt_id={}".format(PATH, ckpt_id)
if success:
logging.info(f"Success {status_msg}")
else:
logging.warning(f"Failure {status_msg}")
```
This will create ZeRO model and optimizer partitions along with `zero_to_fp32.py` script in checkpoint directory.
You can use this script to do offline consolidation.
It requires no configuration files or GPUs. Here is an example of its usage:
```bash
$ cd /path/to/checkpoint_dir
$ ./zero_to_fp32.py . pytorch_model.bin
Processing zero checkpoint at global_step1
Detected checkpoint of type zero stage 3, world_size: 2
Saving fp32 state dict to pytorch_model.bin (total_numel=60506624)
```
To get 32bit model for saving/inference, you can perform:
```python
from deepspeed.utils.zero_to_fp32 import load_state_dict_from_zero_checkpoint
unwrapped_model = accelerator.unwrap_model(model)
fp32_model = load_state_dict_from_zero_checkpoint(unwrapped_model, checkpoint_dir)
```
If you are only interested in the `state_dict`, you can do the following:
```python
from deepspeed.utils.zero_to_fp32 import get_fp32_state_dict_from_zero_checkpoint
state_dict = get_fp32_state_dict_from_zero_checkpoint(checkpoint_dir)
```
Note that all these functions require ~2x memory (general RAM) of the size of the final checkpoint.
## ZeRO Inference
DeepSpeed ZeRO Inference supports ZeRO stage 3 with ZeRO-Infinity.
It uses the same ZeRO protocol as training, but it doesn't use an optimizer and a lr scheduler and only stage 3 is relevant.
With accelerate integration, you just need to prepare the model and dataloader as shown below:
```python
model, eval_dataloader = accelerator.prepare(model, eval_dataloader)
```
## Few caveats to be aware of
1. Current integration doesn’t support Pipeline Parallelism of DeepSpeed.
2. Current integration doesn’t support `mpu`, limiting the tensor parallelism which is supported in Megatron-LM.
3. Current integration doesn’t support multiple models.
## DeepSpeed Resources
The documentation for the internals related to deepspeed can be found [here](../package_reference/deepspeed).
- [Project's github](https://github.com/microsoft/deepspeed)
- [Usage docs](https://www.deepspeed.ai/getting-started/)
- [API docs](https://deepspeed.readthedocs.io/en/latest/index.html)
- [Blog posts](https://www.microsoft.com/en-us/research/search/?q=deepspeed)
Papers:
- [ZeRO: Memory Optimizations Toward Training Trillion Parameter Models](https://arxiv.org/abs/1910.02054)
- [ZeRO-Offload: Democratizing Billion-Scale Model Training](https://arxiv.org/abs/2101.06840)
- [ZeRO-Infinity: Breaking the GPU Memory Wall for Extreme Scale Deep Learning](https://arxiv.org/abs/2104.07857)
Finally, please, remember that 🤗 `Accelerate` only integrates DeepSpeed, therefore if you
have any problems or questions with regards to DeepSpeed usage, please, file an issue with [DeepSpeed GitHub](https://github.com/microsoft/DeepSpeed/issues).
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/tracking.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Tracking
There are a large number of experiment tracking API's available, however getting them all to work with in a multi-processing environment can oftentimes be complex.
🤗 Accelerate provides a general tracking API that can be used to log useful items during your script through [`Accelerator.log`]
## Integrated Trackers
Currently `Accelerate` supports four trackers out-of-the-box:
- TensorBoard
- WandB
- CometML
- MLFlow
To use any of them, pass in the selected type(s) to the `log_with` parameter in [`Accelerate`]:
```python
from accelerate import Accelerator
from accelerate.utils import LoggerType
accelerator = Accelerator(log_with="all") # For all available trackers in the environment
accelerator = Accelerator(log_with="wandb")
accelerator = Accelerator(log_with=["wandb", LoggerType.TENSORBOARD])
```
At the start of your experiment [`Accelerator.init_trackers`] should be used to setup your project, and potentially add any experiment hyperparameters to be logged:
```python
hps = {"num_iterations": 5, "learning_rate": 1e-2}
accelerator.init_trackers("my_project", config=hps)
```
When you are ready to log any data, [`Accelerator.log`] should be used.
A `step` can also be passed in to correlate the data with a particular step in the training loop.
```python
accelerator.log({"train_loss": 1.12, "valid_loss": 0.8}, step=1)
```
Once you've finished training, make sure to run [`Accelerator.end_training`] so that all the trackers can run their finish functionalities if they have any.
```python
accelerator.end_training()
```
A full example is below:
```python
from accelerate import Accelerator
accelerator = Accelerator(log_with="all")
config = {
"num_iterations": 5,
"learning_rate": 1e-2,
"loss_function": str(my_loss_function),
}
accelerator.init_trackers("example_project", config=config)
my_model, my_optimizer, my_training_dataloader = accelerate.prepare(my_model, my_optimizer, my_training_dataloader)
device = accelerator.device
my_model.to(device)
for iteration in config["num_iterations"]:
for step, batch in my_training_dataloader:
my_optimizer.zero_grad()
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = my_model(inputs)
loss = my_loss_function(outputs, targets)
accelerator.backward(loss)
my_optimizer.step()
accelerator.log({"training_loss": loss}, step=step)
accelerator.end_training()
```
If a tracker requires a directory to save data to, such as `TensorBoard`, then pass the directory path to `project_dir`. The `project_dir` parameter is useful
when there are other configurations to be combined with in the [`~utils.ProjectConfiguration`] data class. For example, you can save the TensorBoard data to `project_dir` and everything else can be logged in the `logging_dir` parameter of [`~utils.ProjectConfiguration`:
```python
accelerator = Accelerator(log_with="tensorboard", project_dir=".")
# use with ProjectConfiguration
config = ProjectConfiguration(project_dir=".", logging_dir="another/directory")
accelerator = Accelerator(log_with="tensorboard", project_config=config)
```
## Implementing Custom Trackers
To implement a new tracker to be used in `Accelerator`, a new one can be made through implementing the [`GeneralTracker`] class.
Every tracker must implement three functions and have three properties:
- `__init__`:
- Should store a `run_name` and initialize the tracker API of the integrated library.
- If a tracker stores their data locally (such as TensorBoard), a `logging_dir` parameter can be added.
- `store_init_configuration`:
- Should take in a `values` dictionary and store them as a one-time experiment configuration
- `log`:
- Should take in a `values` dictionary and a `step`, and should log them to the run
- `name` (`str`):
- A unique string name for the tracker, such as `"wandb"` for the wandb tracker.
- This will be used for interacting with this tracker specifically
- `requires_logging_directory` (`bool`):
- Whether a `logging_dir` is needed for this particular tracker and if it uses one.
- `tracker`:
- This should be implemented as a `@property` function
- Should return the internal tracking mechanism the library uses, such as the `run` object for `wandb`.
Each method should also utilize the [`state.PartialState`] class if the logger should only be executed on the main process for instance.
A brief example can be seen below with an integration with Weights and Biases, containing only the relevant information and logging just on
the main process:
```python
from accelerate.tracking import GeneralTracker, on_main_process
from typing import Optional
import wandb
class MyCustomTracker(GeneralTracker):
name = "wandb"
requires_logging_directory = False
@on_main_process
def __init__(self, run_name: str):
self.run_name = run_name
run = wandb.init(self.run_name)
@property
def tracker(self):
return self.run.run
@on_main_process
def store_init_configuration(self, values: dict):
wandb.config(values)
@on_main_process
def log(self, values: dict, step: Optional[int] = None):
wandb.log(values, step=step)
```
When you are ready to build your `Accelerator` object, pass in an **instance** of your tracker to [`Accelerator.log_with`] to have it automatically
be used with the API:
```python
tracker = MyCustomTracker("some_run_name")
accelerator = Accelerator(log_with=tracker)
```
These also can be mixed with existing trackers, including with `"all"`:
```python
tracker = MyCustomTracker("some_run_name")
accelerator = Accelerator(log_with=[tracker, "all"])
```
## Accessing the internal tracker
If some custom interactions with a tracker might be wanted directly, you can quickly access one using the
[`Accelerator.get_tracker`] method. Just pass in the string corresponding to a tracker's `.name` attribute
and it will return that tracker on the main process.
This example shows doing so with wandb:
```python
wandb_tracker = accelerator.get_tracker("wandb")
```
From there you can interact with `wandb`'s `run` object like normal:
```python
wandb_run.log_artifact(some_artifact_to_log)
```
<Tip>
Trackers built in Accelerate will automatically execute on the correct process,
so if a tracker is only meant to be ran on the main process it will do so
automatically.
</Tip>
If you want to truly remove Accelerate's wrapping entirely, you can
achieve the same outcome with:
```python
wandb_tracker = accelerator.get_tracker("wandb", unwrap=True)
with accelerator.on_main_process:
wandb_tracker.log_artifact(some_artifact_to_log)
```
## When a wrapper cannot work
If a library has an API that does not follow a strict `.log` with an overall dictionary such as Neptune.AI, logging can be done manually under an `if accelerator.is_main_process` statement:
```diff
from accelerate import Accelerator
+ import neptune.new as neptune
accelerator = Accelerator()
+ run = neptune.init(...)
my_model, my_optimizer, my_training_dataloader = accelerate.prepare(my_model, my_optimizer, my_training_dataloader)
device = accelerator.device
my_model.to(device)
for iteration in config["num_iterations"]:
for batch in my_training_dataloader:
my_optimizer.zero_grad()
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = my_model(inputs)
loss = my_loss_function(outputs, targets)
total_loss += loss
accelerator.backward(loss)
my_optimizer.step()
+ if accelerator.is_main_process:
+ run["logs/training/batch/loss"].log(loss)
```
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/explore.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Learning how to incorporate 🤗 Accelerate features quickly!
Please use the interactive tool below to help you get started with learning about a particular
feature of 🤗 Accelerate and how to utilize it! It will provide you with a code diff, an explaination
towards what is going on, as well as provide you with some useful links to explore more within
the documentation!
Most code examples start from the following python code before integrating 🤗 Accelerate in some way:
```python
for batch in dataloader:
optimizer.zero_grad()
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
loss.backward()
optimizer.step()
scheduler.step()
```
<div class="block dark:hidden">
<iframe
src="https://muellerzr-accelerate-examples.hf.space?__theme=light"
width="850"
height="1600"
></iframe>
</div>
<div class="hidden dark:block">
<iframe
src="https://muellerzr-accelerate-examples.hf.space?__theme=dark"
width="850"
height="1600"
></iframe>
</div>
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/ipex.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Intel® Extension for PyTorch
[IPEX](https://github.com/intel/intel-extension-for-pytorch) is optimized for CPUs with AVX-512 or above, and functionally works for CPUs with only AVX2. So, it is expected to bring performance benefit for Intel CPU generations with AVX-512 or above while CPUs with only AVX2 (e.g., AMD CPUs or older Intel CPUs) might result in a better performance under IPEX, but not guaranteed. IPEX provides performance optimizations for CPU training with both Float32 and BFloat16. The usage of BFloat16 is the main focus of the following sections.
Low precision data type BFloat16 has been natively supported on the 3rd Generation Xeon® Scalable Processors (aka Cooper Lake) with AVX512 instruction set and will be supported on the next generation of Intel® Xeon® Scalable Processors with Intel® Advanced Matrix Extensions (Intel® AMX) instruction set with further boosted performance. The Auto Mixed Precision for CPU backend has been enabled since PyTorch-1.10. At the same time, the support of Auto Mixed Precision with BFloat16 for CPU and BFloat16 optimization of operators has been massively enabled in Intel® Extension for PyTorch, and partially upstreamed to PyTorch master branch. Users can get better performance and user experience with IPEX Auto Mixed Precision.
## IPEX installation:
IPEX release is following PyTorch, to install via pip:
| PyTorch Version | IPEX version |
| :---------------: | :----------: |
| 2.0 | 2.0.0 |
| 1.13 | 1.13.0 |
| 1.12 | 1.12.300 |
| 1.11 | 1.11.200 |
| 1.10 | 1.10.100 |
```
pip install intel_extension_for_pytorch==<version_name> -f https://developer.intel.com/ipex-whl-stable-cpu
```
Check more approaches for [IPEX installation](https://intel.github.io/intel-extension-for-pytorch/cpu/latest/tutorials/installation.html).
## How It Works For Training optimization in CPU
🤗 Accelerate has integrated [IPEX](https://github.com/intel/intel-extension-for-pytorch), all you need to do is enabling it through the config.
**Scenario 1**: Acceleration of No distributed CPU training
Run <u>accelerate config</u> on your machine:
```bash
$ accelerate config
-----------------------------------------------------------------------------------------------------------------------------------------------------------
In which compute environment are you running?
This machine
-----------------------------------------------------------------------------------------------------------------------------------------------------------
Which type of machine are you using?
No distributed training
Do you want to run your training on CPU only (even if a GPU / Apple Silicon device is available)? [yes/NO]:yes
Do you want to use Intel PyTorch Extension (IPEX) to speed up training on CPU? [yes/NO]:yes
Do you wish to optimize your script with torch dynamo?[yes/NO]:NO
Do you want to use DeepSpeed? [yes/NO]: NO
-----------------------------------------------------------------------------------------------------------------------------------------------------------
Do you wish to use FP16 or BF16 (mixed precision)?
bf16
```
This will generate a config file that will be used automatically to properly set the
default options when doing
```bash
accelerate launch my_script.py --args_to_my_script
```
For instance, here is how you would run the NLP example `examples/nlp_example.py` (from the root of the repo) with IPEX enabled.
default_config.yaml that is generated after `accelerate config`
```bash
compute_environment: LOCAL_MACHINE
distributed_type: 'NO'
downcast_bf16: 'no'
ipex_config:
ipex: true
machine_rank: 0
main_training_function: main
mixed_precision: bf16
num_machines: 1
num_processes: 1
rdzv_backend: static
same_network: true
tpu_env: []
tpu_use_cluster: false
tpu_use_sudo: false
use_cpu: true
```
```bash
accelerate launch examples/nlp_example.py
```
**Scenario 2**: Acceleration of distributed CPU training
we use Intel oneCCL for communication, combined with Intel® MPI library to deliver flexible, efficient, scalable cluster messaging on Intel® architecture. you could refer the [here](https://huggingface.co/docs/transformers/perf_train_cpu_many) for the installation guide
Run <u>accelerate config</u> on your machine(node0):
```bash
$ accelerate config
-----------------------------------------------------------------------------------------------------------------------------------------------------------
In which compute environment are you running?
This machine
-----------------------------------------------------------------------------------------------------------------------------------------------------------
Which type of machine are you using?
multi-CPU
How many different machines will you use (use more than 1 for multi-node training)? [1]: 4
-----------------------------------------------------------------------------------------------------------------------------------------------------------
What is the rank of this machine?
0
What is the IP address of the machine that will host the main process? 36.112.23.24
What is the port you will use to communicate with the main process? 29500
Are all the machines on the same local network? Answer `no` if nodes are on the cloud and/or on different network hosts [YES/no]: yes
Do you want to use Intel PyTorch Extension (IPEX) to speed up training on CPU? [yes/NO]:yes
Do you wish to optimize your script with torch dynamo?[yes/NO]:NO
How many CPU(s) should be used for distributed training? [1]:16
-----------------------------------------------------------------------------------------------------------------------------------------------------------
Do you wish to use FP16 or BF16 (mixed precision)?
bf16
```
For instance, here is how you would run the NLP example `examples/nlp_example.py` (from the root of the repo) with IPEX enabled for distributed CPU training.
default_config.yaml that is generated after `accelerate config`
```bash
compute_environment: LOCAL_MACHINE
distributed_type: MULTI_CPU
downcast_bf16: 'no'
ipex_config:
ipex: true
machine_rank: 0
main_process_ip: 36.112.23.24
main_process_port: 29500
main_training_function: main
mixed_precision: bf16
num_machines: 4
num_processes: 16
rdzv_backend: static
same_network: true
tpu_env: []
tpu_use_cluster: false
tpu_use_sudo: false
use_cpu: true
```
Set following env and using intel MPI to launch the training
In node0, you need to create a configuration file which contains the IP addresses of each node (for example hostfile) and pass that configuration file path as an argument.
```bash
$ cat hostfile
xxx.xxx.xxx.xxx #node0 ip
xxx.xxx.xxx.xxx #node1 ip
xxx.xxx.xxx.xxx #node2 ip
xxx.xxx.xxx.xxx #node3 ip
```
Now, run the following command in node0 and **16DDP** will be enabled in node0,node1,node2,node3 with BF16 mixed precision:
```bash
oneccl_bindings_for_pytorch_path=$(python -c "from oneccl_bindings_for_pytorch import cwd; print(cwd)")
source $oneccl_bindings_for_pytorch_path/env/setvars.sh
export CCL_WORKER_COUNT=1
export MASTER_ADDR=xxx.xxx.xxx.xxx #node0 ip
export CCL_ATL_TRANSPORT=ofi
mpirun -f hostfile -n 16 -ppn 4 accelerate launch examples/nlp_example.py
```
## Related Resources
- [Project's github](https://github.com/intel/intel-extension-for-pytorch)
- [API docs](https://intel.github.io/intel-extension-for-pytorch/cpu/latest/tutorials/api_doc.html)
- [Tuning guide](https://intel.github.io/intel-extension-for-pytorch/cpu/latest/tutorials/performance_tuning/tuning_guide.html)
- [Blogs & Publications](https://intel.github.io/intel-extension-for-pytorch/cpu/latest/tutorials/blogs_publications.html)
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/sagemaker.md
|
<!--Copyright 2021 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Amazon SageMaker
Hugging Face and Amazon introduced new [Hugging Face Deep Learning Containers (DLCs)](https://github.com/aws/deep-learning-containers/blob/master/available_images.md#huggingface-training-containers) to
make it easier than ever to train Hugging Face Transformer models in [Amazon SageMaker](https://aws.amazon.com/sagemaker/).
## Getting Started
### Setup & Installation
Before you can run your 🤗 Accelerate scripts on Amazon SageMaker you need to sign up for an AWS account. If you do not
have an AWS account yet learn more [here](https://docs.aws.amazon.com/sagemaker/latest/dg/gs-set-up.html).
After you have your AWS Account you need to install the `sagemaker` sdk for 🤗 Accelerate with:
```bash
pip install "accelerate[sagemaker]" --upgrade
```
🤗 Accelerate currently uses the 🤗 DLCs, with `transformers`, `datasets` and `tokenizers` pre-installed. 🤗
Accelerate is not in the DLC yet (will soon be added!) so to use it within Amazon SageMaker you need to create a
`requirements.txt` in the same directory where your training script is located and add it as dependency:
```
accelerate
```
You should also add any other dependencies you have to this `requirements.txt`.
### Configure 🤗 Accelerate
You can configure the launch configuration for Amazon SageMaker the same as you do for non SageMaker training jobs with
the 🤗 Accelerate CLI:
```bash
accelerate config
# In which compute environment are you running? ([0] This machine, [1] AWS (Amazon SageMaker)): 1
```
🤗 Accelerate will go through a questionnaire about your Amazon SageMaker setup and create a config file you can edit.
<Tip>
🤗 Accelerate is not saving any of your credentials.
</Tip>
### Prepare a 🤗 Accelerate fine-tuning script
The training script is very similar to a training script you might run outside of SageMaker, but to save your model
after training you need to specify either `/opt/ml/model` or use `os.environ["SM_MODEL_DIR"]` as your save
directory. After training, artifacts in this directory are uploaded to S3:
```diff
- torch.save('/opt/ml/model`)
+ accelerator.save('/opt/ml/model')
```
<Tip warning={true}>
SageMaker doesn’t support argparse actions. If you want to use, for example, boolean hyperparameters, you need to
specify type as bool in your script and provide an explicit True or False value for this hyperparameter. [[REF]](https://sagemaker.readthedocs.io/en/stable/frameworks/pytorch/using_pytorch.html#prepare-a-pytorch-training-script).
</Tip>
### Launch Training
You can launch your training with 🤗 Accelerate CLI with:
```
accelerate launch path_to_script.py --args_to_the_script
```
This will launch your training script using your configuration. The only thing you have to do is provide all the
arguments needed by your training script as named arguments.
**Examples**
<Tip>
If you run one of the example scripts, don't forget to add `accelerator.save('/opt/ml/model')` to it.
</Tip>
```bash
accelerate launch ./examples/sagemaker_example.py
```
Outputs:
```
Configuring Amazon SageMaker environment
Converting Arguments to Hyperparameters
Creating Estimator
2021-04-08 11:56:50 Starting - Starting the training job...
2021-04-08 11:57:13 Starting - Launching requested ML instancesProfilerReport-1617883008: InProgress
.........
2021-04-08 11:58:54 Starting - Preparing the instances for training.........
2021-04-08 12:00:24 Downloading - Downloading input data
2021-04-08 12:00:24 Training - Downloading the training image..................
2021-04-08 12:03:39 Training - Training image download completed. Training in progress..
........
epoch 0: {'accuracy': 0.7598039215686274, 'f1': 0.8178438661710037}
epoch 1: {'accuracy': 0.8357843137254902, 'f1': 0.882249560632689}
epoch 2: {'accuracy': 0.8406862745098039, 'f1': 0.8869565217391304}
........
2021-04-08 12:05:40 Uploading - Uploading generated training model
2021-04-08 12:05:40 Completed - Training job completed
Training seconds: 331
Billable seconds: 331
You can find your model data at: s3://your-bucket/accelerate-sagemaker-1-2021-04-08-11-56-47-108/output/model.tar.gz
```
## Advanced Features
### Distributed Training: Data Parallelism
Set up the accelerate config by running `accelerate config` and answer the SageMaker questions and set it up.
To use SageMaker DDP, select it when asked
`What is the distributed mode? ([0] No distributed training, [1] data parallelism):`.
Example config below:
```yaml
base_job_name: accelerate-sagemaker-1
compute_environment: AMAZON_SAGEMAKER
distributed_type: DATA_PARALLEL
ec2_instance_type: ml.p3.16xlarge
iam_role_name: xxxxx
image_uri: null
mixed_precision: fp16
num_machines: 1
profile: xxxxx
py_version: py38
pytorch_version: 1.10.2
region: us-east-1
transformers_version: 4.17.0
use_cpu: false
```
### Distributed Training: Model Parallelism
*currently in development, will be supported soon.*
### Python packages and dependencies
🤗 Accelerate currently uses the 🤗 DLCs, with `transformers`, `datasets` and `tokenizers` pre-installed. If you
want to use different/other Python packages you can do this by adding them to the `requirements.txt`. These packages
will be installed before your training script is started.
### Local Training: SageMaker Local mode
The local mode in the SageMaker SDK allows you to run your training script locally inside the HuggingFace DLC (Deep Learning container)
or using your custom container image. This is useful for debugging and testing your training script inside the final container environment.
Local mode uses Docker compose (*Note: Docker Compose V2 is not supported yet*). The SDK will handle the authentication against ECR
to pull the DLC to your local environment. You can emulate CPU (single and multi-instance) and GPU (single instance) SageMaker training jobs.
To use local mode, you need to set your `ec2_instance_type` to `local`.
```yaml
ec2_instance_type: local
```
### Advanced configuration
The configuration allows you to override parameters for the [Estimator](https://sagemaker.readthedocs.io/en/stable/api/training/estimators.html).
These settings have to be applied in the config file and are not part of `accelerate config`. You can control many additional aspects of the training job, e.g. use Spot instances, enable network isolation and many more.
```yaml
additional_args:
# enable network isolation to restrict internet access for containers
enable_network_isolation: True
```
You can find all available configuration [here](https://sagemaker.readthedocs.io/en/stable/api/training/estimators.html).
### Use Spot Instances
You can use Spot Instances e.g. using (see [Advanced configuration](#advanced-configuration)):
```yaml
additional_args:
use_spot_instances: True
max_wait: 86400
```
*Note: Spot Instances are subject to be terminated and training to be continued from a checkpoint. This is not handled in 🤗 Accelerate out of the box. Contact us if you would like this feature.*
### Remote scripts: Use scripts located on Github
*undecided if feature is needed. Contact us if you would like this feature.*
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/training_zoo.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Example Zoo
Below contains a non-exhuastive list of tutorials and scripts showcasing 🤗 Accelerate
## Official Accelerate Examples:
### Basic Examples
These examples showcase the base features of Accelerate and are a great starting point
- [Barebones NLP example](https://github.com/huggingface/accelerate/blob/main/examples/nlp_example.py)
- [Barebones distributed NLP example in a Jupyter Notebook](https://github.com/huggingface/notebooks/blob/main/examples/accelerate_examples/simple_nlp_example.ipynb)
- [Barebones computer vision example](https://github.com/huggingface/accelerate/blob/main/examples/cv_example.py)
- [Barebones distributed computer vision example in a Jupyter Notebook](https://github.com/huggingface/notebooks/blob/main/examples/accelerate_examples/simple_cv_example.ipynb)
- [Using Accelerate in Kaggle](https://www.kaggle.com/code/muellerzr/multi-gpu-and-accelerate)
### Feature Specific Examples
These examples showcase specific features that the Accelerate framework offers
- [Automatic memory-aware gradient accumulation](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/automatic_gradient_accumulation.py)
- [Checkpointing states](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/checkpointing.py)
- [Cross validation](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/cross_validation.py)
- [DeepSpeed](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/deepspeed_with_config_support.py)
- [Fully Sharded Data Parallelism](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/fsdp_with_peak_mem_tracking.py)
- [Gradient accumulation](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/gradient_accumulation.py)
- [Memory-aware batch size finder](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/memory.py)
- [Metric Computation](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/multi_process_metrics.py)
- [Using Trackers](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/tracking.py)
- [Using Megatron-LM](https://github.com/huggingface/accelerate/blob/main/examples/by_feature/megatron_lm_gpt_pretraining.py)
### Full Examples
These examples showcase every feature in Accelerate at once that was shown in "Feature Specific Examples"
- [Complete NLP example](https://github.com/huggingface/accelerate/blob/main/examples/complete_nlp_example.py)
- [Complete computer vision example](https://github.com/huggingface/accelerate/blob/main/examples/complete_cv_example.py)
- [Very complete and extensible vision example showcasing SLURM, hydra, and a very extensible usage of the framework](https://github.com/yuvalkirstain/PickScore)
- [Causal language model fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/language-modeling/run_clm_no_trainer.py)
- [Masked language model fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/language-modeling/run_mlm_no_trainer.py)
- [Speech pretraining example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/speech-pretraining/run_wav2vec2_pretraining_no_trainer.py)
- [Translation fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/translation/run_translation_no_trainer.py)
- [Text classification fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/text-classification/run_glue_no_trainer.py)
- [Semantic segmentation fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/semantic-segmentation/run_semantic_segmentation_no_trainer.py)
- [Question answering fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/question-answering/run_qa_no_trainer.py)
- [Beam search question answering fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/question-answering/run_qa_beam_search_no_trainer.py)
- [Multiple choice question answering fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/multiple-choice/run_swag_no_trainer.py)
- [Named entity recognition fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/token-classification/run_ner_no_trainer.py)
- [Image classification fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/image-classification/run_image_classification_no_trainer.py)
- [Summarization fine-tuning example](https://github.com/huggingface/transformers/blob/main/examples/pytorch/summarization/run_summarization_no_trainer.py)
- [End-to-end examples on how to use AWS SageMaker integration of Accelerate](https://github.com/huggingface/notebooks/blob/main/sagemaker/22_accelerate_sagemaker_examples/README.md)
- [Megatron-LM examples for various NLp tasks](https://github.com/pacman100/accelerate-megatron-test)
## Integration Examples
These are tutorials from libraries that integrate with 🤗 Accelerate:
> Don't find your integration here? Make a PR to include it!
### Catalyst
- [Distributed training tutorial with Catalyst](https://catalyst-team.github.io/catalyst/tutorials/ddp.html)
### DALLE2-pytorch
- [Fine-tuning DALLE2](https://github.com/lucidrains/DALLE2-pytorch#usage)
### 🤗 diffusers
- [Performing textual inversion with diffusers](https://github.com/huggingface/diffusers/tree/main/examples/textual_inversion)
- [Training DreamBooth with diffusers](https://github.com/huggingface/diffusers/tree/main/examples/dreambooth)
### fastai
- [Distributed training from Jupyter Notebooks with fastai](https://docs.fast.ai/tutorial.distributed.html)
- [Basic distributed training examples with fastai](https://docs.fast.ai/examples/distributed_app_examples.html)
### GradsFlow
- [Auto Image Classification with GradsFlow](https://docs.gradsflow.com/en/latest/examples/nbs/01-ImageClassification/)
### imagen-pytorch
- [Fine-tuning Imagen](https://github.com/lucidrains/imagen-pytorch#usage)
### Kornia
- [Fine-tuning vision models with Kornia's Trainer](https://kornia.readthedocs.io/en/latest/get-started/training.html)
### PyTorch Accelerated
- [Quickstart distributed training tutorial with PyTorch Accelerated](https://pytorch-accelerated.readthedocs.io/en/latest/quickstart.html)
### PyTorch3D
- [Perform Deep Learning with 3D data](https://pytorch3d.org/tutorials/)
### Stable-Dreamfusion
- [Training with Stable-Dreamfusion to convert text to a 3D model](https://colab.research.google.com/drive/1MXT3yfOFvO0ooKEfiUUvTKwUkrrlCHpF?usp=sharing)
### Tez
- [Leaf disease detection with Tez and Accelerate](https://www.kaggle.com/code/abhishek/tez-faster-and-easier-training-for-leaf-detection/notebook)
### trlx
- [How to implement a sentiment learning task with trlx](https://github.com/CarperAI/trlx#example-how-to-add-a-task)
### Comfy-UI
- [Enabling using large Stable Diffusion Models in low-vram settings using Accelerate](https://github.com/comfyanonymous/ComfyUI/blob/master/comfy/model_management.py#L291-L296)
## In Science
Below contains a non-exhaustive list of papers utilizing 🤗 Accelerate.
> Don't find your paper here? Make a PR to include it!
* Yuval Kirstain, Adam Polyak, Uriel Singer, Shahbuland Matiana, Joe Penna, Omer Levy: “Pick-a-Pic: An Open Dataset of User Preferences for Text-to-Image Generation”, 2023; [arXiv:2305.01569](http://arxiv.org/abs/2305.01569).
* Lei Wang, Wanyu Xu, Yihuai Lan, Zhiqiang Hu, Yunshi Lan, Roy Ka-Wei Lee, Ee-Peng Lim: “Plan-and-Solve Prompting: Improving Zero-Shot Chain-of-Thought Reasoning by Large Language Models”, 2023; [arXiv:2305.04091](http://arxiv.org/abs/2305.04091).
* Arthur Câmara, Claudia Hauff: “Moving Stuff Around: A study on efficiency of moving documents into memory for Neural IR models”, 2022; [arXiv:2205.08343](http://arxiv.org/abs/2205.08343).
* Ying Sheng, Lianmin Zheng, Binhang Yuan, Zhuohan Li, Max Ryabinin, Daniel Y. Fu, Zhiqiang Xie, Beidi Chen, Clark Barrett, Joseph E. Gonzalez, Percy Liang, Christopher Ré, Ion Stoica, Ce Zhang: “High-throughput Generative Inference of Large Language Models with a Single GPU”, 2023; [arXiv:2303.06865](http://arxiv.org/abs/2303.06865).
* Peter Melchior, Yan Liang, ChangHoon Hahn, Andy Goulding: “Autoencoding Galaxy Spectra I: Architecture”, 2022; [arXiv:2211.07890](http://arxiv.org/abs/2211.07890).
* Jiaao Chen, Aston Zhang, Mu Li, Alex Smola, Diyi Yang: “A Cheaper and Better Diffusion Language Model with Soft-Masked Noise”, 2023; [arXiv:2304.04746](http://arxiv.org/abs/2304.04746).
* Ayaan Haque, Matthew Tancik, Alexei A. Efros, Aleksander Holynski, Angjoo Kanazawa: “Instruct-NeRF2NeRF: Editing 3D Scenes with Instructions”, 2023; [arXiv:2303.12789](http://arxiv.org/abs/2303.12789).
* Luke Melas-Kyriazi, Christian Rupprecht, Iro Laina, Andrea Vedaldi: “RealFusion: 360° Reconstruction of Any Object from a Single Image”, 2023; [arXiv:2302.10663](http://arxiv.org/abs/2302.10663).
* Xiaoshi Wu, Keqiang Sun, Feng Zhu, Rui Zhao, Hongsheng Li: “Better Aligning Text-to-Image Models with Human Preference”, 2023; [arXiv:2303.14420](http://arxiv.org/abs/2303.14420).
* Yongliang Shen, Kaitao Song, Xu Tan, Dongsheng Li, Weiming Lu, Yueting Zhuang: “HuggingGPT: Solving AI Tasks with ChatGPT and its Friends in HuggingFace”, 2023; [arXiv:2303.17580](http://arxiv.org/abs/2303.17580).
* Yue Yang, Wenlin Yao, Hongming Zhang, Xiaoyang Wang, Dong Yu, Jianshu Chen: “Z-LaVI: Zero-Shot Language Solver Fueled by Visual Imagination”, 2022; [arXiv:2210.12261](http://arxiv.org/abs/2210.12261).
* Sheng-Yen Chou, Pin-Yu Chen, Tsung-Yi Ho: “How to Backdoor Diffusion Models?”, 2022; [arXiv:2212.05400](http://arxiv.org/abs/2212.05400).
* Junyoung Seo, Wooseok Jang, Min-Seop Kwak, Jaehoon Ko, Hyeonsu Kim, Junho Kim, Jin-Hwa Kim, Jiyoung Lee, Seungryong Kim: “Let 2D Diffusion Model Know 3D-Consistency for Robust Text-to-3D Generation”, 2023; [arXiv:2303.07937](http://arxiv.org/abs/2303.07937).
* Or Patashnik, Daniel Garibi, Idan Azuri, Hadar Averbuch-Elor, Daniel Cohen-Or: “Localizing Object-level Shape Variations with Text-to-Image Diffusion Models”, 2023; [arXiv:2303.11306](http://arxiv.org/abs/2303.11306).
* Dídac Surís, Sachit Menon, Carl Vondrick: “ViperGPT: Visual Inference via Python Execution for Reasoning”, 2023; [arXiv:2303.08128](http://arxiv.org/abs/2303.08128).
* Chenyang Qi, Xiaodong Cun, Yong Zhang, Chenyang Lei, Xintao Wang, Ying Shan, Qifeng Chen: “FateZero: Fusing Attentions for Zero-shot Text-based Video Editing”, 2023; [arXiv:2303.09535](http://arxiv.org/abs/2303.09535).
* Sean Welleck, Jiacheng Liu, Ximing Lu, Hannaneh Hajishirzi, Yejin Choi: “NaturalProver: Grounded Mathematical Proof Generation with Language Models”, 2022; [arXiv:2205.12910](http://arxiv.org/abs/2205.12910).
* Elad Richardson, Gal Metzer, Yuval Alaluf, Raja Giryes, Daniel Cohen-Or: “TEXTure: Text-Guided Texturing of 3D Shapes”, 2023; [arXiv:2302.01721](http://arxiv.org/abs/2302.01721).
* Puijin Cheng, Li Lin, Yijin Huang, Huaqing He, Wenhan Luo, Xiaoying Tang: “Learning Enhancement From Degradation: A Diffusion Model For Fundus Image Enhancement”, 2023; [arXiv:2303.04603](http://arxiv.org/abs/2303.04603).
* Shun Shao, Yftah Ziser, Shay Cohen: “Erasure of Unaligned Attributes from Neural Representations”, 2023; [arXiv:2302.02997](http://arxiv.org/abs/2302.02997).
* Seonghyeon Ye, Hyeonbin Hwang, Sohee Yang, Hyeongu Yun, Yireun Kim, Minjoon Seo: “In-Context Instruction Learning”, 2023; [arXiv:2302.14691](http://arxiv.org/abs/2302.14691).
* Shikun Liu, Linxi Fan, Edward Johns, Zhiding Yu, Chaowei Xiao, Anima Anandkumar: “Prismer: A Vision-Language Model with An Ensemble of Experts”, 2023; [arXiv:2303.02506](http://arxiv.org/abs/2303.02506 ).
* Haoyu Chen, Zhihua Wang, Yang Yang, Qilin Sun, Kede Ma: “Learning a Deep Color Difference Metric for Photographic Images”, 2023; [arXiv:2303.14964](http://arxiv.org/abs/2303.14964).
* Van-Hoang Le, Hongyu Zhang: “Log Parsing with Prompt-based Few-shot Learning”, 2023; [arXiv:2302.07435](http://arxiv.org/abs/2302.07435).
* Keito Kudo, Yoichi Aoki, Tatsuki Kuribayashi, Ana Brassard, Masashi Yoshikawa, Keisuke Sakaguchi, Kentaro Inui: “Do Deep Neural Networks Capture Compositionality in Arithmetic Reasoning?”, 2023; [arXiv:2302.07866](http://arxiv.org/abs/2302.07866).
* Ruoyao Wang, Peter Jansen, Marc-Alexandre Côté, Prithviraj Ammanabrolu: “Behavior Cloned Transformers are Neurosymbolic Reasoners”, 2022; [arXiv:2210.07382](http://arxiv.org/abs/2210.07382).
* Martin Wessel, Tomáš Horych, Terry Ruas, Akiko Aizawa, Bela Gipp, Timo Spinde: “Introducing MBIB -- the first Media Bias Identification Benchmark Task and Dataset Collection”, 2023; [arXiv:2304.13148](http://arxiv.org/abs/2304.13148 ). DOI: [https://dx.doi.org/10.1145/3539618.3591882 10.1145/3539618.3591882].
* Hila Chefer, Yuval Alaluf, Yael Vinker, Lior Wolf, Daniel Cohen-Or: “Attend-and-Excite: Attention-Based Semantic Guidance for Text-to-Image Diffusion Models”, 2023; [arXiv:2301.13826](http://arxiv.org/abs/2301.13826).
* Marcio Fonseca, Yftah Ziser, Shay B. Cohen: “Factorizing Content and Budget Decisions in Abstractive Summarization of Long Documents”, 2022; [arXiv:2205.12486](http://arxiv.org/abs/2205.12486).
* Elad Richardson, Gal Metzer, Yuval Alaluf, Raja Giryes, Daniel Cohen-Or: “TEXTure: Text-Guided Texturing of 3D Shapes”, 2023; [arXiv:2302.01721](http://arxiv.org/abs/2302.01721).
* Tianxing He, Jingyu Zhang, Tianle Wang, Sachin Kumar, Kyunghyun Cho, James Glass, Yulia Tsvetkov: “On the Blind Spots of Model-Based Evaluation Metrics for Text Generation”, 2022; [arXiv:2212.10020](http://arxiv.org/abs/2212.10020).
* Ori Ram, Yoav Levine, Itay Dalmedigos, Dor Muhlgay, Amnon Shashua, Kevin Leyton-Brown, Yoav Shoham: “In-Context Retrieval-Augmented Language Models”, 2023; [arXiv:2302.00083](http://arxiv.org/abs/2302.00083).
* Dacheng Li, Rulin Shao, Hongyi Wang, Han Guo, Eric P. Xing, Hao Zhang: “MPCFormer: fast, performant and private Transformer inference with MPC”, 2022; [arXiv:2211.01452](http://arxiv.org/abs/2211.01452).
* Baolin Peng, Michel Galley, Pengcheng He, Chris Brockett, Lars Liden, Elnaz Nouri, Zhou Yu, Bill Dolan, Jianfeng Gao: “GODEL: Large-Scale Pre-Training for Goal-Directed Dialog”, 2022; [arXiv:2206.11309](http://arxiv.org/abs/2206.11309).
* Egil Rønningstad, Erik Velldal, Lilja Øvrelid: “Entity-Level Sentiment Analysis (ELSA): An exploratory task survey”, 2023, Proceedings of the 29th International Conference on Computational Linguistics, 2022, pages 6773-6783; [arXiv:2304.14241](http://arxiv.org/abs/2304.14241).
* Charlie Snell, Ilya Kostrikov, Yi Su, Mengjiao Yang, Sergey Levine: “Offline RL for Natural Language Generation with Implicit Language Q Learning”, 2022; [arXiv:2206.11871](http://arxiv.org/abs/2206.11871).
* Zhiruo Wang, Shuyan Zhou, Daniel Fried, Graham Neubig: “Execution-Based Evaluation for Open-Domain Code Generation”, 2022; [arXiv:2212.10481](http://arxiv.org/abs/2212.10481).
* Minh-Long Luu, Zeyi Huang, Eric P. Xing, Yong Jae Lee, Haohan Wang: “Expeditious Saliency-guided Mix-up through Random Gradient Thresholding”, 2022; [arXiv:2212.04875](http://arxiv.org/abs/2212.04875).
* Jun Hao Liew, Hanshu Yan, Daquan Zhou, Jiashi Feng: “MagicMix: Semantic Mixing with Diffusion Models”, 2022; [arXiv:2210.16056](http://arxiv.org/abs/2210.16056).
* Yaqing Wang, Subhabrata Mukherjee, Xiaodong Liu, Jing Gao, Ahmed Hassan Awadallah, Jianfeng Gao: “LiST: Lite Prompted Self-training Makes Parameter-Efficient Few-shot Learners”, 2021; [arXiv:2110.06274](http://arxiv.org/abs/2110.06274).
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/usage_guides/gradient_accumulation.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Performing gradient accumulation with 🤗 Accelerate
Gradient accumulation is a technique where you can train on bigger batch sizes than
your machine would normally be able to fit into memory. This is done by accumulating gradients over
several batches, and only stepping the optimizer after a certain number of batches have been performed.
While technically standard gradient accumulation code would work fine in a distributed setup, it is not the most efficient
method for doing so and you may experience considerable slowdowns!
In this tutorial you will see how to quickly setup gradient accumulation and perform it with the utilities provided in 🤗 Accelerate,
which can total to adding just one new line of code!
This example will use a very simplistic PyTorch training loop that performs gradient accumulation every two batches:
```python
device = "cuda"
model.to(device)
gradient_accumulation_steps = 2
for index, batch in enumerate(training_dataloader):
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
loss = loss / gradient_accumulation_steps
loss.backward()
if (index + 1) % gradient_accumulation_steps == 0:
optimizer.step()
scheduler.step()
optimizer.zero_grad()
```
## Converting it to 🤗 Accelerate
First the code shown earlier will be converted to utilize 🤗 Accelerate without the special gradient accumulation helper:
```diff
+ from accelerate import Accelerator
+ accelerator = Accelerator()
+ model, optimizer, training_dataloader, scheduler = accelerator.prepare(
+ model, optimizer, training_dataloader, scheduler
+ )
for index, batch in enumerate(training_dataloader):
inputs, targets = batch
- inputs = inputs.to(device)
- targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
loss = loss / gradient_accumulation_steps
+ accelerator.backward(loss)
if (index+1) % gradient_accumulation_steps == 0:
optimizer.step()
scheduler.step()
optimizer.zero_grad()
```
<Tip warning={true}>
In its current state, this code is not going to perform gradient accumulation efficiently due to a process called gradient synchronization. Read more about that in the [Concepts tutorial](../concept_guides/gradient_synchronization)!
</Tip>
## Letting 🤗 Accelerate handle gradient accumulation
All that is left now is to let 🤗 Accelerate handle the gradient accumulation for us. To do so you should pass in a `gradient_accumulation_steps` parameter to [`Accelerator`], dictating the number
of steps to perform before each call to `step()` and how to automatically adjust the loss during the call to [`~Accelerator.backward`]:
```diff
from accelerate import Accelerator
- accelerator = Accelerator()
+ accelerator = Accelerator(gradient_accumulation_steps=2)
```
Alternatively, you can pass in a `gradient_accumulation_plugin` parameter to the [`Accelerator`] object's `__init__`, which will allow you to further customize the gradient accumulation behavior.
Read more about that in the [GradientAccumulationPlugin](../package_reference/accelerator#accelerate.utils.GradientAccumulationPlugin) docs.
From here you can use the [`~Accelerator.accumulate`] context manager from inside your training loop to automatically perform the gradient accumulation for you!
You just wrap it around the entire training part of our code:
```diff
- for index, batch in enumerate(training_dataloader):
+ for batch in training_dataloader:
+ with accelerator.accumulate(model):
inputs, targets = batch
outputs = model(inputs)
```
You can remove all the special checks for the step number and the loss adjustment:
```diff
- loss = loss / gradient_accumulation_steps
accelerator.backward(loss)
- if (index+1) % gradient_accumulation_steps == 0:
optimizer.step()
scheduler.step()
optimizer.zero_grad()
```
As you can see the [`Accelerator`] is able to keep track of the batch number you are on and it will automatically know whether to step through the prepared optimizer and how to adjust the loss.
<Tip>
Typically with gradient accumulation, you would need to adjust the number of steps to reflect the change in total batches you are
training on. 🤗 Accelerate automagically does this for you by default. Behind the scenes we instantiate a GradientAccumulationPlugin configured to do this.
</Tip>
## The finished code
Below is the finished implementation for performing gradient accumulation with 🤗 Accelerate
```python
for batch in training_dataloader:
with accelerator.accumulate(model):
inputs, targets = batch
outputs = model(inputs)
loss = loss_function(outputs, targets)
accelerator.backward(loss)
optimizer.step()
scheduler.step()
optimizer.zero_grad()
```
To learn more about what magic this wraps around, read the [Gradient Synchronization concept guide](../concept_guides/gradient_synchronization)
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/basic_tutorials/notebook.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Launching Multi-GPU Training from a Jupyter Environment
This tutorial teaches you how to fine tune a computer vision model with 🤗 Accelerate from a Jupyter Notebook on a distributed system.
You will also learn how to setup a few requirements needed for ensuring your environment is configured properly, your data has been prepared properly, and finally how to launch training.
<Tip>
This tutorial is also available as a Jupyter Notebook [here](https://github.com/huggingface/notebooks/blob/main/examples/accelerate_examples/simple_cv_example.ipynb)
</Tip>
## Configuring the Environment
Before any training can be performed, a 🤗 Accelerate config file must exist in the system. Usually this can be done by running the following in a terminal and answering the prompts:
```bash
accelerate config
```
However, if general defaults are fine and you are *not* running on a TPU, 🤗Accelerate has a utility to quickly write your GPU configuration into a config file via [`utils.write_basic_config`].
The following code will restart Jupyter after writing the configuration, as CUDA code was called to perform this.
<Tip warning={true}>
CUDA can't be initialized more than once on a multi-GPU system. It's fine to debug in the notebook and have calls to CUDA, but in order to finally train a full cleanup and restart will need to be performed.
</Tip>
```python
import os
from accelerate.utils import write_basic_config
write_basic_config() # Write a config file
os._exit(00) # Restart the notebook
```
## Preparing the Dataset and Model
Next you should prepare your dataset. As mentioned at earlier, great care should be taken when preparing the `DataLoaders` and model to make sure that **nothing** is put on *any* GPU.
If you do, it is recommended to put that specific code into a function and call that from within the notebook launcher interface, which will be shown later.
Make sure the dataset is downloaded based on the directions [here](https://github.com/huggingface/accelerate/tree/main/examples#simple-vision-example)
```python
import os, re, torch, PIL
import numpy as np
from torch.optim.lr_scheduler import OneCycleLR
from torch.utils.data import DataLoader, Dataset
from torchvision.transforms import Compose, RandomResizedCrop, Resize, ToTensor
from accelerate import Accelerator
from accelerate.utils import set_seed
from timm import create_model
```
First you need to create a function to extract the class name based on a filename:
```python
import os
data_dir = "../../images"
fnames = os.listdir(data_dir)
fname = fnames[0]
print(fname)
```
```python out
beagle_32.jpg
```
In the case here, the label is `beagle`. Using regex you can extract the label from the filename:
```python
import re
def extract_label(fname):
stem = fname.split(os.path.sep)[-1]
return re.search(r"^(.*)_\d+\.jpg$", stem).groups()[0]
```
```python
extract_label(fname)
```
And you can see it properly returned the right name for our file:
```python out
"beagle"
```
Next a `Dataset` class should be made to handle grabbing the image and the label:
```python
class PetsDataset(Dataset):
def __init__(self, file_names, image_transform=None, label_to_id=None):
self.file_names = file_names
self.image_transform = image_transform
self.label_to_id = label_to_id
def __len__(self):
return len(self.file_names)
def __getitem__(self, idx):
fname = self.file_names[idx]
raw_image = PIL.Image.open(fname)
image = raw_image.convert("RGB")
if self.image_transform is not None:
image = self.image_transform(image)
label = extract_label(fname)
if self.label_to_id is not None:
label = self.label_to_id[label]
return {"image": image, "label": label}
```
Now to build the dataset. Outside the training function you can find and declare all the filenames and labels and use them as references inside the
launched function:
```python
fnames = [os.path.join("../../images", fname) for fname in fnames if fname.endswith(".jpg")]
```
Next gather all the labels:
```python
all_labels = [extract_label(fname) for fname in fnames]
id_to_label = list(set(all_labels))
id_to_label.sort()
label_to_id = {lbl: i for i, lbl in enumerate(id_to_label)}
```
Next, you should make a `get_dataloaders` function that will return your built dataloaders for you. As mentioned earlier, if data is automatically
sent to the GPU or a TPU device when building your `DataLoaders`, they must be built using this method.
```python
def get_dataloaders(batch_size: int = 64):
"Builds a set of dataloaders with a batch_size"
random_perm = np.random.permutation(len(fnames))
cut = int(0.8 * len(fnames))
train_split = random_perm[:cut]
eval_split = random_perm[cut:]
# For training a simple RandomResizedCrop will be used
train_tfm = Compose([RandomResizedCrop((224, 224), scale=(0.5, 1.0)), ToTensor()])
train_dataset = PetsDataset([fnames[i] for i in train_split], image_transform=train_tfm, label_to_id=label_to_id)
# For evaluation a deterministic Resize will be used
eval_tfm = Compose([Resize((224, 224)), ToTensor()])
eval_dataset = PetsDataset([fnames[i] for i in eval_split], image_transform=eval_tfm, label_to_id=label_to_id)
# Instantiate dataloaders
train_dataloader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size, num_workers=4)
eval_dataloader = DataLoader(eval_dataset, shuffle=False, batch_size=batch_size * 2, num_workers=4)
return train_dataloader, eval_dataloader
```
Finally, you should import the scheduler to be used later:
```python
from torch.optim.lr_scheduler import CosineAnnealingLR
```
## Writing the Training Function
Now you can build the training loop. [`notebook_launcher`] works by passing in a function to call that will be ran across the distributed system.
Here is a basic training loop for the animal classification problem:
<Tip>
The code has been split up to allow for explainations on each section. A full version that can be copy and pasted will be available at the end
</Tip>
```python
def training_loop(mixed_precision="fp16", seed: int = 42, batch_size: int = 64):
set_seed(seed)
accelerator = Accelerator(mixed_precision=mixed_precision)
```
First you should set the seed and create an [`Accelerator`] object as early in the training loop as possible.
<Tip warning={true}>
If training on the TPU, your training loop should take in the model as a parameter and it should be instantiated
outside of the training loop function. See the [TPU best practices](../concept_guides/training_tpu)
to learn why
</Tip>
Next you should build your dataloaders and create your model:
```python
train_dataloader, eval_dataloader = get_dataloaders(batch_size)
model = create_model("resnet50d", pretrained=True, num_classes=len(label_to_id))
```
<Tip>
You build the model here so that the seed also controls the new weight initialization
</Tip>
As you are performing transfer learning in this example, the encoder of the model starts out frozen so the head of the model can be
trained only initially:
```python
for param in model.parameters():
param.requires_grad = False
for param in model.get_classifier().parameters():
param.requires_grad = True
```
Normalizing the batches of images will make training a little faster:
```python
mean = torch.tensor(model.default_cfg["mean"])[None, :, None, None]
std = torch.tensor(model.default_cfg["std"])[None, :, None, None]
```
To make these constants available on the active device, you should set it to the Accelerator's device:
```python
mean = mean.to(accelerator.device)
std = std.to(accelerator.device)
```
Next instantiate the rest of the PyTorch classes used for training:
```python
optimizer = torch.optim.Adam(params=model.parameters(), lr=3e-2 / 25)
lr_scheduler = OneCycleLR(optimizer=optimizer, max_lr=3e-2, epochs=5, steps_per_epoch=len(train_dataloader))
```
Before passing everything to [`~Accelerator.prepare`].
<Tip>
There is no specific order to remember, you just need to unpack the objects in the same order you gave them to the prepare method.
</Tip>
```python
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
```
Now train the model:
```python
for epoch in range(5):
model.train()
for batch in train_dataloader:
inputs = (batch["image"] - mean) / std
outputs = model(inputs)
loss = torch.nn.functional.cross_entropy(outputs, batch["label"])
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
```
The evaluation loop will look slightly different compared to the training loop. The number of elements passed as well as the overall
total accuracy of each batch will be added to two constants:
```python
model.eval()
accurate = 0
num_elems = 0
```
Next you have the rest of your standard PyTorch loop:
```python
for batch in eval_dataloader:
inputs = (batch["image"] - mean) / std
with torch.no_grad():
outputs = model(inputs)
predictions = outputs.argmax(dim=-1)
```
Before finally the last major difference.
When performing distributed evaluation, the predictions and labels need to be passed through
[`~Accelerator.gather`] so that all of the data is available on the current device and a properly calculated metric can be achieved:
```python
accurate_preds = accelerator.gather(predictions) == accelerator.gather(batch["label"])
num_elems += accurate_preds.shape[0]
accurate += accurate_preds.long().sum()
```
Now you just need to calculate the actual metric for this problem, and you can print it on the main process using [`~Accelerator.print`]:
```python
eval_metric = accurate.item() / num_elems
accelerator.print(f"epoch {epoch}: {100 * eval_metric:.2f}")
```
A full version of this training loop is available below:
```python
def training_loop(mixed_precision="fp16", seed: int = 42, batch_size: int = 64):
set_seed(seed)
# Initialize accelerator
accelerator = Accelerator(mixed_precision=mixed_precision)
# Build dataloaders
train_dataloader, eval_dataloader = get_dataloaders(batch_size)
# Instantiate the model (you build the model here so that the seed also controls new weight initaliziations)
model = create_model("resnet50d", pretrained=True, num_classes=len(label_to_id))
# Freeze the base model
for param in model.parameters():
param.requires_grad = False
for param in model.get_classifier().parameters():
param.requires_grad = True
# You can normalize the batches of images to be a bit faster
mean = torch.tensor(model.default_cfg["mean"])[None, :, None, None]
std = torch.tensor(model.default_cfg["std"])[None, :, None, None]
# To make these constants available on the active device, set it to the accelerator device
mean = mean.to(accelerator.device)
std = std.to(accelerator.device)
# Intantiate the optimizer
optimizer = torch.optim.Adam(params=model.parameters(), lr=3e-2 / 25)
# Instantiate the learning rate scheduler
lr_scheduler = OneCycleLR(optimizer=optimizer, max_lr=3e-2, epochs=5, steps_per_epoch=len(train_dataloader))
# Prepare everything
# There is no specific order to remember, you just need to unpack the objects in the same order you gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader, lr_scheduler
)
# Now you train the model
for epoch in range(5):
model.train()
for batch in train_dataloader:
inputs = (batch["image"] - mean) / std
outputs = model(inputs)
loss = torch.nn.functional.cross_entropy(outputs, batch["label"])
accelerator.backward(loss)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
model.eval()
accurate = 0
num_elems = 0
for batch in eval_dataloader:
inputs = (batch["image"] - mean) / std
with torch.no_grad():
outputs = model(inputs)
predictions = outputs.argmax(dim=-1)
accurate_preds = accelerator.gather(predictions) == accelerator.gather(batch["label"])
num_elems += accurate_preds.shape[0]
accurate += accurate_preds.long().sum()
eval_metric = accurate.item() / num_elems
# Use accelerator.print to print only on the main process.
accelerator.print(f"epoch {epoch}: {100 * eval_metric:.2f}")
```
## Using the notebook_launcher
All that's left is to use the [`notebook_launcher`].
You pass in the function, the arguments (as a tuple), and the number of processes to train on. (See the [documentation](../package_reference/launchers) for more information)
```python
from accelerate import notebook_launcher
```
```python
args = ("fp16", 42, 64)
notebook_launcher(training_loop, args, num_processes=2)
```
In the case of running on the TPU, it would look like so:
```python
model = create_model("resnet50d", pretrained=True, num_classes=len(label_to_id))
args = (model, "fp16", 42, 64)
notebook_launcher(training_loop, args, num_processes=8)
```
As it's running it will print the progress as well as state how many devices you ran on. This tutorial was ran with two GPUs:
```python out
Launching training on 2 GPUs.
epoch 0: 88.12
epoch 1: 91.73
epoch 2: 92.58
epoch 3: 93.90
epoch 4: 94.71
```
And that's it!
## Conclusion
This notebook showed how to perform distributed training from inside of a Jupyter Notebook. Some key notes to remember:
- Make sure to save any code that use CUDA (or CUDA imports) for the function passed to [`notebook_launcher`]
- Set the `num_processes` to be the number of devices used for training (such as number of GPUs, CPUs, TPUs, etc)
- If using the TPU, declare your model outside the training loop function
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/basic_tutorials/overview.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Overview
Welcome to the 🤗 Accelerate tutorials! These introductory guides will help catch you up to speed on working with 🤗 Accelerate.
You'll learn how to modify your code to have it work with the API seamlessly, how to launch your script properly,
and more!
These tutorials assume some basic knowledge of Python and familiarity with the PyTorch framework.
If you have any questions about 🤗 Accelerate, feel free to join and ask the community on our [forum](https://discuss.huggingface.co/c/accelerate/18).
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/basic_tutorials/migration.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Migrating your code to 🤗 Accelerate
This tutorial will detail how to easily convert existing PyTorch code to use 🤗 Accelerate!
You'll see that by just changing a few lines of code, 🤗 Accelerate can perform its magic and get you on
your way toward running your code on distributed systems with ease!
## The base training loop
To begin, write out a very basic PyTorch training loop.
<Tip>
We are under the presumption that `training_dataloader`, `model`, `optimizer`, `scheduler`, and `loss_function` have been defined beforehand.
</Tip>
```python
device = "cuda"
model.to(device)
for batch in training_dataloader:
optimizer.zero_grad()
inputs, targets = batch
inputs = inputs.to(device)
targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
loss.backward()
optimizer.step()
scheduler.step()
```
## Add in 🤗 Accelerate
To start using 🤗 Accelerate, first import and create an [`Accelerator`] instance:
```python
from accelerate import Accelerator
accelerator = Accelerator()
```
[`Accelerator`] is the main force behind utilizing all the possible options for distributed training!
### Setting the right device
The [`Accelerator`] class knows the right device to move any PyTorch object to at any time, so you should
change the definition of `device` to come from [`Accelerator`]:
```diff
- device = 'cuda'
+ device = accelerator.device
model.to(device)
```
### Preparing your objects
Next, you need to pass all of the important objects related to training into [`~Accelerator.prepare`]. 🤗 Accelerate will
make sure everything is setup in the current environment for you to start training:
```
model, optimizer, training_dataloader, scheduler = accelerator.prepare(
model, optimizer, training_dataloader, scheduler
)
```
These objects are returned in the same order they were sent in. By default when using `device_placement=True`, all of the objects that can be sent to the right device will be.
If you need to work with data that isn't passed to [~Accelerator.prepare] but should be on the active device, you should pass in the `device` you made earlier.
<Tip warning={true}>
Accelerate will only prepare objects that inherit from their respective PyTorch classes (such as `torch.optim.Optimizer`).
</Tip>
### Modifying the training loop
Finally, three lines of code need to be changed in the training loop. 🤗 Accelerate's DataLoader classes will automatically handle the device placement by default,
and [`~Accelerator.backward`] should be used for performing the backward pass:
```diff
- inputs = inputs.to(device)
- targets = targets.to(device)
outputs = model(inputs)
loss = loss_function(outputs, targets)
- loss.backward()
+ accelerator.backward(loss)
```
With that, your training loop is now ready to use 🤗 Accelerate!
## The finished code
Below is the final version of the converted code:
```python
from accelerate import Accelerator
accelerator = Accelerator()
model, optimizer, training_dataloader, scheduler = accelerator.prepare(
model, optimizer, training_dataloader, scheduler
)
for batch in training_dataloader:
optimizer.zero_grad()
inputs, targets = batch
outputs = model(inputs)
loss = loss_function(outputs, targets)
accelerator.backward(loss)
optimizer.step()
scheduler.step()
```
## More Resources
To check out more ways on how to migrate to 🤗 Accelerate, check out our [interactive migration tutorial](https://huggingface.co/docs/accelerate/usage_guides/explore) which showcases other items that need to be watched for when using Accelerate and how to do so quickly.
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/basic_tutorials/install.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Installation and Configuration
Before you start, you will need to setup your environment, install the appropriate packages, and configure 🤗 Accelerate. 🤗 Accelerate is tested on **Python 3.8+**.
## Installing 🤗 Accelerate
🤗 Accelerate is available on pypi and conda, as well as on GitHub. Details to install from each are below:
### pip
To install 🤗 Accelerate from pypi, perform:
```bash
pip install accelerate
```
### conda
🤗 Accelerate can also be installed with conda with:
```bash
conda install -c conda-forge accelerate
```
### Source
New features are added every day that haven't been released yet. To try them out yourself, install
from the GitHub repository:
```bash
pip install git+https://github.com/huggingface/accelerate
```
If you're working on contributing to the library or wish to play with the source code and see live
results as you run the code, an editable version can be installed from a locally-cloned version of the
repository:
```bash
git clone https://github.com/huggingface/accelerate
cd accelerate
pip install -e .
```
## Configuring 🤗 Accelerate
After installing, you need to configure 🤗 Accelerate for how the current system is setup for training.
To do so run the following and answer the questions prompted to you:
```bash
accelerate config
```
To write a barebones configuration that doesn't include options such as DeepSpeed configuration or running on TPUs, you can quickly run:
```bash
python -c "from accelerate.utils import write_basic_config; write_basic_config(mixed_precision='fp16')"
```
🤗 Accelerate will automatically utilize the maximum number of GPUs available and set the mixed precision mode.
To check that your configuration looks fine, run:
```bash
accelerate env
```
An example output is shown below, which describes two GPUs on a single machine with no mixed precision being used:
```bash
- `Accelerate` version: 0.11.0.dev0
- Platform: Linux-5.10.0-15-cloud-amd64-x86_64-with-debian-11.3
- Python version: 3.7.12
- Numpy version: 1.19.5
- PyTorch version (GPU?): 1.12.0+cu102 (True)
- `Accelerate` default config:
- compute_environment: LOCAL_MACHINE
- distributed_type: MULTI_GPU
- mixed_precision: no
- use_cpu: False
- num_processes: 2
- machine_rank: 0
- num_machines: 1
- main_process_ip: None
- main_process_port: None
- main_training_function: main
- deepspeed_config: {}
- fsdp_config: {}
```
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/basic_tutorials/launch.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Launching your 🤗 Accelerate scripts
In the previous tutorial, you were introduced to how to modify your current training script to use 🤗 Accelerate.
The final version of that code is shown below:
```python
from accelerate import Accelerator
accelerator = Accelerator()
model, optimizer, training_dataloader, scheduler = accelerator.prepare(
model, optimizer, training_dataloader, scheduler
)
for batch in training_dataloader:
optimizer.zero_grad()
inputs, targets = batch
outputs = model(inputs)
loss = loss_function(outputs, targets)
accelerator.backward(loss)
optimizer.step()
scheduler.step()
```
But how do you run this code and have it utilize the special hardware available to it?
First, you should rewrite the above code into a function, and make it callable as a script. For example:
```diff
from accelerate import Accelerator
+ def main():
accelerator = Accelerator()
model, optimizer, training_dataloader, scheduler = accelerator.prepare(
model, optimizer, training_dataloader, scheduler
)
for batch in training_dataloader:
optimizer.zero_grad()
inputs, targets = batch
outputs = model(inputs)
loss = loss_function(outputs, targets)
accelerator.backward(loss)
optimizer.step()
scheduler.step()
+ if __name__ == "__main__":
+ main()
```
Next, you need to launch it with `accelerate launch`.
<Tip warning={true}>
It's recommended you run `accelerate config` before using `accelerate launch` to configure your environment to your liking.
Otherwise 🤗 Accelerate will use very basic defaults depending on your system setup.
</Tip>
## Using accelerate launch
🤗 Accelerate has a special CLI command to help you launch your code in your system through `accelerate launch`.
This command wraps around all of the different commands needed to launch your script on various platforms, without you having to remember what each of them is.
<Tip>
If you are familiar with launching scripts in PyTorch yourself such as with `torchrun`, you can still do this. It is not required to use `accelerate launch`.
</Tip>
You can launch your script quickly by using:
```bash
accelerate launch {script_name.py} --arg1 --arg2 ...
```
Just put `accelerate launch` at the start of your command, and pass in additional arguments and parameters to your script afterward like normal!
Since this runs the various torch spawn methods, all of the expected environment variables can be modified here as well.
For example, here is how to use `accelerate launch` with a single GPU:
```bash
CUDA_VISIBLE_DEVICES="0" accelerate launch {script_name.py} --arg1 --arg2 ...
```
You can also use `accelerate launch` without performing `accelerate config` first, but you may need to manually pass in the right configuration parameters.
In this case, 🤗 Accelerate will make some hyperparameter decisions for you, e.g., if GPUs are available, it will use all of them by default without the mixed precision.
Here is how you would use all GPUs and train with mixed precision disabled:
```bash
accelerate launch --multi_gpu {script_name.py} {--arg1} {--arg2} ...
```
Or by specifying a number of GPUs to use:
```bash
accelerate launch --num_processes=2 {script_name.py} {--arg1} {--arg2} ...
```
To get more specific you should pass in the needed parameters yourself. For instance, here is how you
would also launch that same script on two GPUs using mixed precision while avoiding all of the warnings:
```bash
accelerate launch --multi_gpu --mixed_precision=fp16 --num_processes=2 {script_name.py} {--arg1} {--arg2} ...
```
For a complete list of parameters you can pass in, run:
```bash
accelerate launch -h
```
<Tip>
Even if you are not using 🤗 Accelerate in your code, you can still use the launcher for starting your scripts!
</Tip>
For a visualization of this difference, that earlier `accelerate launch` on multi-gpu would look something like so with `torchrun`:
```bash
MIXED_PRECISION="fp16" torchrun --nproc_per_node=2 --num_machines=1 {script_name.py} {--arg1} {--arg2} ...
```
You can also launch your script utilizing the launch CLI as a python module itself, enabling the ability to pass in other python-specific
launching behaviors. To do so, use `accelerate.commands.launch` instead of `accelerate launch`:
```bash
python -m accelerate.commands.launch --num_processes=2 {script_name.py} {--arg1} {--arg2}
```
If you want to execute the script with any other python flags, you can pass them in as well similar to `-m`, such as
the below example enabling unbuffered stdout and stderr:
```bash
python -u -m accelerate.commands.launch --num_processes=2 {script_name.py} {--arg1} {--arg2}
```
## Why you should always use `accelerate config`
Why is it useful to the point you should **always** run `accelerate config`?
Remember that earlier call to `accelerate launch` as well as `torchrun`?
Post configuration, to run that script with the needed parts you just need to use `accelerate launch` outright, without passing anything else in:
```bash
accelerate launch {script_name.py} {--arg1} {--arg2} ...
```
## Custom Configurations
As briefly mentioned earlier, `accelerate launch` should be mostly used through combining set configurations
made with the `accelerate config` command. These configs are saved to a `default_config.yaml` file in your cache folder for 🤗 Accelerate.
This cache folder is located at (with decreasing order of priority):
- The content of your environment variable `HF_HOME` suffixed with `accelerate`.
- If it does not exist, the content of your environment variable `XDG_CACHE_HOME` suffixed with
`huggingface/accelerate`.
- If this does not exist either, the folder `~/.cache/huggingface/accelerate`.
To have multiple configurations, the flag `--config_file` can be passed to the `accelerate launch` command paired
with the location of the custom yaml.
An example yaml may look something like the following for two GPUs on a single machine using `fp16` for mixed precision:
```yaml
compute_environment: LOCAL_MACHINE
deepspeed_config: {}
distributed_type: MULTI_GPU
fsdp_config: {}
machine_rank: 0
main_process_ip: null
main_process_port: null
main_training_function: main
mixed_precision: fp16
num_machines: 1
num_processes: 2
use_cpu: false
```
Launching a script from the location of that custom yaml file looks like the following:
```bash
accelerate launch --config_file {path/to/config/my_config_file.yaml} {script_name.py} {--arg1} {--arg2} ...
```
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/concept_guides/deferring_execution.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Deferring Executions
When you run your usual script, instructions are executed in order. Using 🤗 Accelerate to deploy your script on several
GPUs at the same time introduces a complication: while each process executes all instructions in order, some may be
faster than others.
You might need to wait for all processes to have reached a certain point before executing a given instruction. For
instance, you shouldn't save a model before being sure every process is done with training, and you wouldn't want to
continue training before all the model weights have been loaded in. To do this, just write the following line in your code:
```
accelerator.wait_for_everyone()
```
This instruction will block all the processes that arrive first until all the other processes have reached that
point (if you run your script on just one GPU or CPU, this won't do anything).
A few example cases of when to use this utility are listed below:
<Tip>
Some of these are utilized with the [`~Accelerator.main_process_first`] context manager, which utilizes [`~Accelerator.wait_for_everyone`] to
run a particular set of code on the main process beforehand before triggering and launching the other processes
</Tip>
## Downloading a Dataset
When downloading a dataset, you should download it first on the main process and then load the cached dataset afterward
<Tip>
`load_dataset` will perform a lock under the hood to stop multiple downloads from happening at once, but if you are downloading something
not using this library you should use this method.
</Tip>
```python
with accelerator.main_process_first():
datasets = load_dataset("glue", "mrpc")
```
Under the hood this is the same as calling:
```python
# First do something on the main process
if accelerator.is_main_process:
datasets = load_dataset("glue", "mrpc")
else:
accelerator.wait_for_everyone()
# And then send it to the rest of them
if not accelerator.is_main_process:
datasets = load_dataset("glue", "mrpc")
else:
accelerator.wait_for_everyone()
```
## Saving the `state_dict`
When saving the `state_dict` of the model, since you would normally save one file on just the main process
you should specify that:
```python
if accelerator.is_main_process:
model = accelerator.unwrap_model(model)
torch.save(model.state_dict(), "weights.pth")
```
## Loading in the `state_dict`
When loading in the `state_dict` to a model, optimizer, or scheduler, you should wait
for all workers to have the weights loaded in before moving on to training
```python
with accelerator.main_process_first():
state = torch.load("weights.pth")
model.load_state_dict(state)
```
## Applying a multi-worker CPU operation
Applying a `map()` operation on multiple workers, such as tokenizing should be done on the
main process first, and then propagated to each one.
```python
datasets = load_dataset("glue", "mrpc")
with accelerator.main_process_first():
tokenized_datasets = datasets.map(
tokenize_function,
batched=True,
remove_columns=["idx", "sentence1", "sentence2"],
)
```
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/concept_guides/gradient_synchronization.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Gradient Synchronization
PyTorch's distributed module operates by communicating back and forth between all of the GPUs in your system.
This communication takes time, and ensuring all processes know the states of each other happens at particular triggerpoints
when using the `ddp` module.
These triggerpoints are added to the PyTorch model, specifically their `forward()` and `backward()` methods.
This happens when the model is wrapped with `DistributedDataParallel`:
```python
import torch.nn as nn
from torch.nn.parallel import DistributedDataParallel
model = nn.Linear(10, 10)
ddp_model = DistributedDataParallel(model)
```
In 🤗 Accelerate this conversion happens automatically when calling [`~Accelerator.prepare`] and passing in your model.
```diff
+ from accelerate import Accelerator
+ accelerator = Accelerator()
import torch.nn as nn
- from torch.nn.parallel import DistributedDataParallel
model = nn.Linear(10,10)
+ model = accelerator.prepare(model)
```
## The slowdown in gradient accumulation
You now understand that PyTorch adds hooks to the `forward` and `backward` method of your PyTorch model when
training in a distributed setup. But how does this risk slowing down your code?
In DDP (distributed data parallel), the specific order in which processes are performed and ran are expected
at specific points and these must also occur at roughly the same time before moving on.
The most direct example is when you update model parameters through
`optimizer.step()`.
Without gradient accumulation, all instances of the model need to have updated
their gradients computed, collated, and updated before moving on to the next
batch of data.
When performing gradient accumulation, you accumulate `n` loss gradients and
skip `optimizer.step()` until `n` batches have been reached. As all training
processes only need to sychronize by the time `optimizer.step()` is called,
without any modification to your training step, this neededless inter-process
communication can cause a significant slowdown.
How can you avoid this overhead?
## Solving the slowdown problem
Since you are skipping model parameter updates when training on these batches, their gradients do not need to be synchronized until the point where `optimizer.step()` is actually called.
PyTorch cannot automagically tell when you need to do this, but they do provide a tool to help through the [`no_sync`](https://pytorch.org/docs/stable/generated/torch.nn.parallel.DistributedDataParallel.html#torch.nn.parallel.DistributedDataParallel.no_sync) context manager
that is added to your model after converting it to DDP.
Under this context manager, PyTorch will skip synchronizing the gradients when
`.backward()` is called, and the first call to `.backward()` outside this
context manager will trigger the synchronization. See an example below:
```python
ddp_model, dataloader, optimizer = accelerator.prepare(model, dataloader, optimizer)
for index, batch in enumerate(dataloader):
inputs, targets = batch
# Trigger gradient synchronization on the last batch
if index != (len(dataloader) - 1):
with ddp_model.no_sync():
# Gradients only accumulate
outputs = ddp_model(inputs)
loss = loss_func(outputs)
accelerator.backward(loss)
else:
# Gradients finally sync
outputs = ddp_model(inputs)
loss = loss_func(outputs)
accelerator.backward(loss)
optimizer.step()
```
In 🤗 Accelerate to make this an API that can be called no matter the training device (though it may not do anything if you are not in a distributed system!),
`ddp_model.no_sync` gets replaced with [`~Accelerator.no_sync`] and operates the same way:
```diff
ddp_model, dataloader, optimizer = accelerator.prepare(model, dataloader, optimizer)
for index, batch in enumerate(dataloader):
inputs, targets = batch
# Trigger gradient synchronization on the last batch
if index != (len(dataloader)-1):
- with ddp_model.no_sync():
+ with accelerator.no_sync(model):
# Gradients only accumulate
outputs = ddp_model(inputs)
loss = loss_func(outputs, targets)
accelerator.backward(loss)
else:
# Gradients finally sync
outputs = ddp_model(inputs)
loss = loss_func(outputs)
accelerator.backward(loss)
optimizer.step()
optimizer.zero_grad()
```
As you may expect, the [`~Accelerator.accumulate`] function wraps around this conditional check by keeping track of the current batch number, leaving you with the final
gradient accumulation API:
```python
ddp_model, dataloader, optimizer = accelerator.prepare(model, dataloader, optimizer)
for batch in dataloader:
with accelerator.accumulate(model):
optimizer.zero_grad()
inputs, targets = batch
outputs = model(inputs)
loss = loss_function(outputs, targets)
accelerator.backward(loss)
optimizer.step()
optimizer.zero_grad()
```
As a result, you should either use *`accelerator.accumulate` or `accelerator.no_sync`* when it comes to API choice.
## Just how much of a slowdown is there, and easy mistakes you can make
To set up a realistic example, consider the following setup:
* Two single-GPU T4 nodes and one node with two GPUs
* Each GPU is a T4, and are hosted on GCP
* The script used is a modification of the [NLP Example](https://github.com/muellerzr/timing_experiments/blob/main/baseline.py) script
* Batch size per GPU is 16, and gradients are accumulated every 4 steps
All scripts are available in [this repository](https://github.com/muellerzr/timing_experiments).
If not careful about gradient synchronization and GPU communication, a *large* amount of time can be wasted
from when these GPUs communicate to each other during unnecessary periods.
By how much?
Reference:
- Baseline: uses no synchronization practices discussed here
- `no_sync` improperly: `no_sync` only around the `backward` call, not the `forward`
- `no_sync`: using the `no_sync` pattern properly
- `accumulate`: using [`~Accelerator.accumulate`] properly
Below are the average seconds per batch iterating over 29 batches of data for each setup on both a single node and on the dual-node setup:
| | Baseline | `no_sync` improperly | `no_sync` | `accumulate`|
| :---------: | :-------: | :------------------: | :-------: | :---------: |
| Multi-Node | 2±0.01s | 2.13±0.08s | **0.91±0.11s** | **0.91±0.11s** |
| Single Node | 0.50±0.01s | 0.50±0.01s | **0.41±0.015s** | **0.41±0.015s** |
As you can see, if you are not careful about how you set up your gradient synchronization, you can get upwards of more than a 2x slowdown during training!
If you are worried about making sure everything is done properly, we highly recommend utilizing the [`~Accelerator.accumulate`] function and passing in
`gradient_accumulation_steps` or `gradient_accumulation_plugin` to the [`Accelerator`] object so Accelerate can handle this for you.
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/concept_guides/performance.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Comparing performance between different device setups
Evaluating and comparing the performance from different setups can be quite tricky if you don't know what to look for.
For example, you cannot run the same script with the same batch size across TPU, multi-GPU, and single-GPU with Accelerate
and expect your results to line up.
But why?
There are three reasons for this that this tutorial will cover:
1. **Setting the right seeds**
2. **Observed Batch Sizes**
3. **Learning Rates**
## Setting the Seed
While this issue has not come up as much, make sure to use [`utils.set_seed`] to fully set the seed in all distributed cases so training will be reproducible:
```python
from accelerate.utils import set_seed
set_seed(42)
```
Why is this important? Under the hood this will set **5** different seed settings:
```python
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
# ^^ safe to call this function even if cuda is not available
if is_tpu_available():
xm.set_rng_state(seed)
```
The random state, numpy's state, torch, torch's cuda state, and if TPUs are available torch_xla's cuda state.
## Observed Batch Sizes
When training with Accelerate, the batch size passed to the dataloader is the **batch size per GPU**. What this entails is
a batch size of 64 on two GPUs is truly a batch size of 128. As a result, when testing on a single GPU this needs to be accounted for,
as well as similarly for TPUs.
The below table can be used as a quick reference to try out different batch sizes:
<Tip>
In this example, there are two GPUs for "Multi-GPU" and a TPU pod with 8 workers
</Tip>
| Single GPU Batch Size | Multi-GPU Equivalent Batch Size | TPU Equivalent Batch Size |
|-----------------------|---------------------------------|---------------------------|
| 256 | 128 | 32 |
| 128 | 64 | 16 |
| 64 | 32 | 8 |
| 32 | 16 | 4 |
## Learning Rates
As noted in multiple sources[[1](https://aws.amazon.com/blogs/machine-learning/scalable-multi-node-deep-learning-training-using-gpus-in-the-aws-cloud/)][[2](https://docs.nvidia.com/clara/tlt-mi_archive/clara-train-sdk-v2.0/nvmidl/appendix/training_with_multiple_gpus.html)], the learning rate should be scaled *linearly* based on the number of devices present. The below
snippet shows doing so with Accelerate:
<Tip>
Since users can have their own learning rate schedulers defined, we leave this up to the user to decide if they wish to scale their
learning rate or not.
</Tip>
```python
learning_rate = 1e-3
accelerator = Accelerator()
learning_rate *= accelerator.num_processes
optimizer = AdamW(params=model.parameters(), lr=learning_rate)
```
You will also find that `accelerate` will step the learning rate based on the number of processes being trained on. This is because
of the observed batch size noted earlier. So in the case of 2 GPUs, the learning rate will be stepped twice as often as a single GPU
to account for the batch size being twice as large (if no changes to the batch size on the single GPU instance are made).
## Gradient Accumulation and Mixed Precision
When using gradient accumulation and mixed precision, due to how gradient averaging works (accumulation) and the precision loss (mixed precision),
some degradation in performance is expected. This will be explicitly seen when comparing the batch-wise loss between different compute
setups. However, the overall loss, metric, and general performance at the end of training should be _roughly_ the same.
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/concept_guides/training_tpu.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Training on TPUs with 🤗 Accelerate
Training on TPUs can be slightly different from training on multi-gpu, even with 🤗 Accelerate. This guide aims to show you
where you should be careful and why, as well as the best practices in general.
## Training in a Notebook
The main carepoint when training on TPUs comes from the [`notebook_launcher`]. As mentioned in the [notebook tutorial](../usage_guides/notebook), you need to
restructure your training code into a function that can get passed to the [`notebook_launcher`] function and be careful about not declaring any tensors on the GPU.
While on a TPU that last part is not as important, a critical part to understand is that when you launch code from a notebook you do so through a process called **forking**.
When launching from the command-line, you perform **spawning**, where a python process is not currently running and you *spawn* a new process in. Since your Jupyter notebook is already
utilizing a python process, you need to *fork* a new process from it to launch your code.
Where this becomes important is in regard to declaring your model. On forked TPU processes, it is recommended that you instantiate your model *once* and pass this into your
training function. This is different than training on GPUs where you create `n` models that have their gradients synced and back-propagated at certain moments. Instead, one
model instance is shared between all the nodes and it is passed back and forth. This is important especially when training on low-resource TPUs such as those provided in Kaggle kernels or
on Google Colaboratory.
Below is an example of a training function passed to the [`notebook_launcher`] if training on CPUs or GPUs:
<Tip>
This code snippet is based off the one from the `simple_nlp_example` notebook found [here](https://github.com/huggingface/notebooks/blob/main/examples/accelerate/simple_nlp_example.ipynb) with slight
modifications for the sake of simplicity
</Tip>
```python
def training_function():
# Initialize accelerator
accelerator = Accelerator()
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", num_labels=2)
train_dataloader, eval_dataloader = create_dataloaders(
train_batch_size=hyperparameters["train_batch_size"], eval_batch_size=hyperparameters["eval_batch_size"]
)
# Instantiate optimizer
optimizer = AdamW(params=model.parameters(), lr=hyperparameters["learning_rate"])
# Prepare everything
# There is no specific order to remember, we just need to unpack the objects in the same order we gave them to the
# prepare method.
model, optimizer, train_dataloader, eval_dataloader = accelerator.prepare(
model, optimizer, train_dataloader, eval_dataloader
)
num_epochs = hyperparameters["num_epochs"]
# Now we train the model
for epoch in range(num_epochs):
model.train()
for step, batch in enumerate(train_dataloader):
outputs = model(**batch)
loss = outputs.loss
accelerator.backward(loss)
optimizer.step()
optimizer.zero_grad()
```
```python
from accelerate import notebook_launcher
notebook_launcher(training_function)
```
<Tip>
The `notebook_launcher` will default to 8 processes if 🤗 Accelerate has been configured for a TPU
</Tip>
If you use this example and declare the model *inside* the training loop, then on a low-resource system you will potentially see an error
like:
```
ProcessExitedException: process 0 terminated with signal SIGSEGV
```
This error is *extremely* cryptic but the basic explanation is you ran out of system RAM. You can avoid this entirely by reconfiguring the training function to
accept a single `model` argument, and declare it in an outside cell:
```python
# In another Jupyter cell
model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", num_labels=2)
```
```diff
+ def training_function(model):
# Initialize accelerator
accelerator = Accelerator()
- model = AutoModelForSequenceClassification.from_pretrained("bert-base-cased", num_labels=2)
train_dataloader, eval_dataloader = create_dataloaders(
train_batch_size=hyperparameters["train_batch_size"], eval_batch_size=hyperparameters["eval_batch_size"]
)
...
```
And finally calling the training function with:
```diff
from accelerate import notebook_launcher
- notebook_launcher(training_function)
+ notebook_launcher(training_function, (model,))
```
<Tip>
The above workaround is only needed when launching a TPU instance from a Jupyter Notebook on a low-resource server such as Google Colaboratory or Kaggle. If
using a script or launching on a much beefier server declaring the model beforehand is not needed.
</Tip>
## Mixed Precision and Global Variables
As mentioned in the [mixed precision tutorial](../usage_guides/mixed_precision), 🤗 Accelerate supports fp16 and bf16, both of which can be used on TPUs.
That being said, ideally `bf16` should be utilized as it is extremely efficient to use.
There are two "layers" when using `bf16` and 🤗 Accelerate on TPUs, at the base level and at the operation level.
At the base level, this is enabled when passing `mixed_precision="bf16"` to `Accelerator`, such as:
```python
accelerator = Accelerator(mixed_precision="bf16")
```
By default, this will cast `torch.float` and `torch.double` to `bfloat16` on TPUs.
The specific configuration being set is an environmental variable of `XLA_USE_BF16` is set to `1`.
There is a further configuration you can perform which is setting the `XLA_DOWNCAST_BF16` environmental variable. If set to `1`, then
`torch.float` is `bfloat16` and `torch.double` is `float32`.
This is performed in the `Accelerator` object when passing `downcast_bf16=True`:
```python
accelerator = Accelerator(mixed_precision="bf16", downcast_bf16=True)
```
Using downcasting instead of bf16 everywhere is good for when you are trying to calculate metrics, log values, and more where raw bf16 tensors would be unusable.
## Training Times on TPUs
As you launch your script, you may notice that training seems exceptionally slow at first. This is because TPUs
first run through a few batches of data to see how much memory to allocate before finally utilizing this configured
memory allocation extremely efficiently.
If you notice that your evaluation code to calculate the metrics of your model takes longer due to a larger batch size being used,
it is recommended to keep the batch size the same as the training data if it is too slow. Otherwise the memory will reallocate to this
new batch size after the first few iterations.
<Tip>
Just because the memory is allocated does not mean it will be used or that the batch size will increase when going back to your training dataloader.
</Tip>
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/package_reference/cli.md
|
<!--Copyright 2021 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# The Command Line
Below is a list of all the available commands 🤗 Accelerate with their parameters
## accelerate config
**Command**:
`accelerate config` or `accelerate-config`
Launches a series of prompts to create and save a `default_config.yml` configuration file for your training system. Should
always be ran first on your machine.
**Usage**:
```bash
accelerate config [arguments]
```
**Optional Arguments**:
* `--config_file CONFIG_FILE` (`str`) -- The path to use to store the config file. Will default to a file named default_config.yaml in the cache location, which is the content
of the environment `HF_HOME` suffixed with 'accelerate', or if you don't have such an environment variable, your cache directory
(`~/.cache` or the content of `XDG_CACHE_HOME`) suffixed with `huggingface`.
* `-h`, `--help` (`bool`) -- Show a help message and exit
## accelerate config default
**Command**:
`accelerate config default` or `accelerate-config default`
Create a default config file for Accelerate with only a few flags set.
**Usage**:
```bash
accelerate config default [arguments]
```
**Optional Arguments**:
* `--config_file CONFIG_FILE` (`str`) -- The path to use to store the config file. Will default to a file named default_config.yaml in the cache location, which is the content
of the environment `HF_HOME` suffixed with 'accelerate', or if you don't have such an environment variable, your cache directory
(`~/.cache` or the content of `XDG_CACHE_HOME`) suffixed with `huggingface`.
* `-h`, `--help` (`bool`) -- Show a help message and exit
* `--mixed_precision {no,fp16,bf16}` (`str`) -- Whether or not to use mixed precision training. Choose between FP16 and BF16 (bfloat16) training. BF16 training is only supported on Nvidia Ampere GPUs and PyTorch 1.10 or later.
## accelerate config update
**Command**:
`accelerate config update` or `accelerate-config update`
Update an existing config file with the latest defaults while maintaining the old configuration.
**Usage**:
```bash
accelerate config update [arguments]
```
**Optional Arguments**:
* `--config_file CONFIG_FILE` (`str`) -- The path to the config file to update. Will default to a file named default_config.yaml in the cache location, which is the content
of the environment `HF_HOME` suffixed with 'accelerate', or if you don't have such an environment variable, your cache directory
(`~/.cache` or the content of `XDG_CACHE_HOME`) suffixed with `huggingface`.
* `-h`, `--help` (`bool`) -- Show a help message and exit
## accelerate env
**Command**:
`accelerate env` or `accelerate-env` or `python -m accelerate.commands.env`
Lists the contents of the passed 🤗 Accelerate configuration file. Should always be used when opening an issue on the [GitHub repository](https://github.com/huggingface/accelerate).
**Usage**:
```bash
accelerate env [arguments]
```
**Optional Arguments**:
* `--config_file CONFIG_FILE` (`str`) -- The path to use to store the config file. Will default to a file named default_config.yaml in the cache location, which is the content
of the environment `HF_HOME` suffixed with 'accelerate', or if you don't have such an environment variable, your cache directory
(`~/.cache` or the content of `XDG_CACHE_HOME`) suffixed with `huggingface`.
* `-h`, `--help` (`bool`) -- Show a help message and exit
## accelerate launch
**Command**:
`accelerate launch` or `accelerate-launch` or `python -m accelerate.commands.launch`
Launches a specified script on a distributed system with the right parameters.
**Usage**:
```bash
accelerate launch [arguments] {training_script} --{training_script-argument-1} --{training_script-argument-2} ...
```
**Positional Arguments**:
- `{training_script}` -- The full path to the script to be launched in parallel
- `--{training_script-argument-1}` -- Arguments of the training script
**Optional Arguments**:
* `-h`, `--help` (`bool`) -- Show a help message and exit
* `--config_file CONFIG_FILE` (`str`)-- The config file to use for the default values in the launching script.
* `-m`, `--module` (`bool`) -- Change each process to interpret the launch script as a Python module, executing with the same behavior as 'python -m'.
* `--no_python` (`bool`) -- Skip prepending the training script with 'python' - just execute it directly. Useful when the script is not a Python script.
* `--debug` (`bool`) -- Whether to print out the torch.distributed stack trace when something fails.
* `-q`, `--quiet` (`bool`) -- Silence subprocess errors from the launch stack trace to only show the relevant tracebacks. (Only applicable to DeepSpeed and single-process configurations).
The rest of these arguments are configured through `accelerate config` and are read in from the specified `--config_file` (or default configuration) for their
values. They can also be passed in manually.
**Hardware Selection Arguments**:
* `--cpu` (`bool`) -- Whether or not to force the training on the CPU.
* `--multi_gpu` (`bool`) -- Whether or not this should launch a distributed GPU training.
* `--tpu` (`bool`) -- Whether or not this should launch a TPU training.
* `--ipex` (`bool`) -- Whether or not this should launch an Intel Pytorch Extension (IPEX) training.
**Resource Selection Arguments**:
The following arguments are useful for fine-tuning how available hardware should be used
* `--mixed_precision {no,fp16,bf16}` (`str`) -- Whether or not to use mixed precision training. Choose between FP16 and BF16 (bfloat16) training. BF16 training is only supported on Nvidia Ampere GPUs and PyTorch 1.10 or later.
* `--num_processes NUM_PROCESSES` (`int`) -- The total number of processes to be launched in parallel.
* `--num_machines NUM_MACHINES` (`int`) -- The total number of machines used in this training.
* `--num_cpu_threads_per_process NUM_CPU_THREADS_PER_PROCESS` (`int`) -- The number of CPU threads per process. Can be tuned for optimal performance.
**Training Paradigm Arguments**:
The following arguments are useful for selecting which training paradigm to use.
* `--use_deepspeed` (`bool`) -- Whether or not to use DeepSpeed for training.
* `--use_fsdp` (`bool`) -- Whether or not to use FullyShardedDataParallel for training.
* `--use_megatron_lm` (`bool`) -- Whether or not to use Megatron-LM for training.
* `--use_xpu` (`bool`) -- Whether to use IPEX plugin to speed up training on XPU specifically.
**Distributed GPU Arguments**:
The following arguments are only useful when `multi_gpu` is passed or multi-gpu training is configured through `accelerate config`:
* `--gpu_ids` (`str`) -- What GPUs (by id) should be used for training on this machine as a comma-seperated list
* `--same_network` (`bool`) -- Whether all machines used for multinode training exist on the same local network.
* `--machine_rank MACHINE_RANK` (`int`) -- The rank of the machine on which this script is launched.
* `--main_process_ip MAIN_PROCESS_IP` (`str`) -- The IP address of the machine of rank 0.
* `--main_process_port MAIN_PROCESS_PORT` (`int`) -- The port to use to communicate with the machine of rank 0.
* `--rdzv_backend` (`str`) -- The rendezvous method to use, such as "static" or "c10d"
* `--rdzv_conf` (`str`) -- Additional rendezvous configuration (<key1>=<value1>,<key2>=<value2>,...).
* `--max_restarts` (`int`) -- Maximum number of worker group restarts before failing.
* `--monitor_interval` (`float`) -- Interval, in seconds, to monitor the state of workers.
**TPU Arguments**:
The following arguments are only useful when `tpu` is passed or TPU training is configured through `accelerate config`:
* `--main_training_function MAIN_TRAINING_FUNCTION` (`str`) -- The name of the main function to be executed in your script.
* `--downcast_bf16` (`bool`) -- Whether when using bf16 precision on TPUs if both float and double tensors are cast to bfloat16 or if double tensors remain as float32.
**DeepSpeed Arguments**:
The following arguments are only useful when `use_deepspeed` is passed or `deepspeed` is configured through `accelerate config`:
* `--deepspeed_config_file` (`str`) -- DeepSpeed config file.
* `--zero_stage` (`int`) -- DeepSpeed's ZeRO optimization stage.
* `--offload_optimizer_device` (`str`) -- Decides where (none|cpu|nvme) to offload optimizer states.
* `--offload_param_device` (`str`) -- Decides where (none|cpu|nvme) to offload parameters.
* `--gradient_accumulation_steps` (`int`) -- No of gradient_accumulation_steps used in your training script.
* `--gradient_clipping` (`float`) -- Gradient clipping value used in your training script.
* `--zero3_init_flag` (`str`) -- Decides Whether (true|false) to enable `deepspeed.zero.Init` for constructing massive models. Only applicable with DeepSpeed ZeRO Stage-3.
* `--zero3_save_16bit_model` (`str`) -- Decides Whether (true|false) to save 16-bit model weights when using ZeRO Stage-3. Only applicable with DeepSpeed ZeRO Stage-3.
* `--deepspeed_hostfile` (`str`) -- DeepSpeed hostfile for configuring multi-node compute resources.
* `--deepspeed_exclusion_filter` (`str`) -- DeepSpeed exclusion filter string when using mutli-node setup.
* `--deepspeed_inclusion_filter` (`str`) -- DeepSpeed inclusion filter string when using mutli-node setup.
* `--deepspeed_multinode_launcher` (`str`) -- DeepSpeed multi-node launcher to use.
**Fully Sharded Data Parallelism Arguments**:
The following arguments are only useful when `use_fdsp` is passed or Fully Sharded Data Parallelism is configured through `accelerate config`:
* `--fsdp_offload_params` (`str`) -- Decides Whether (true|false) to offload parameters and gradients to CPU.
* `--fsdp_min_num_params` (`int`) -- FSDP's minimum number of parameters for Default Auto Wrapping.
* `--fsdp_sharding_strategy` (`int`) -- FSDP's Sharding Strategy.
* `--fsdp_auto_wrap_policy` (`str`) -- FSDP's auto wrap policy.
* `--fsdp_transformer_layer_cls_to_wrap` (`str`) -- Transformer layer class name (case-sensitive) to wrap, e.g, `BertLayer`, `GPTJBlock`, `T5Block` ...
* `--fsdp_backward_prefetch_policy` (`str`) -- FSDP's backward prefetch policy.
* `--fsdp_state_dict_type` (`str`) -- FSDP's state dict type.
**Megatron-LM Arguments**:
The following arguments are only useful when `use_megatron_lm` is passed or Megatron-LM is configured through `accelerate config`:
* `--megatron_lm_tp_degree` (``) -- Megatron-LM's Tensor Parallelism (TP) degree.
* `--megatron_lm_pp_degree` (``) -- Megatron-LM's Pipeline Parallelism (PP) degree.
* `--megatron_lm_num_micro_batches` (``) -- Megatron-LM's number of micro batches when PP degree > 1.
* `--megatron_lm_sequence_parallelism` (``) -- Decides Whether (true|false) to enable Sequence Parallelism when TP degree > 1.
* `--megatron_lm_recompute_activations` (``) -- Decides Whether (true|false) to enable Selective Activation Recomputation.
* `--megatron_lm_use_distributed_optimizer` (``) -- Decides Whether (true|false) to use distributed optimizer which shards optimizer state and gradients across Data Pralellel (DP) ranks.
* `--megatron_lm_gradient_clipping` (``) -- Megatron-LM's gradient clipping value based on global L2 Norm (0 to disable).
**AWS SageMaker Arguments**:
The following arguments are only useful when training in SageMaker
* `--aws_access_key_id AWS_ACCESS_KEY_ID` (`str`) -- The AWS_ACCESS_KEY_ID used to launch the Amazon SageMaker training job
* `--aws_secret_access_key AWS_SECRET_ACCESS_KEY` (`str`) -- The AWS_SECRET_ACCESS_KEY used to launch the Amazon SageMaker training job
## accelerate tpu-config
`accelerate tpu-config`
**Usage**:
```bash
accelerate tpu-config [arguments]
```
**Optional Arguments**:
* `-h`, `--help` (`bool`) -- Show a help message and exit
**Config Arguments**:
Arguments that can be configured through `accelerate config`.
* `--config_file` (`str`) -- Path to the config file to use for accelerate.
* `--tpu_name` (`str`) -- The name of the TPU to use. If not specified, will use the TPU specified in the config file.
* `--tpu_zone` (`str`) -- The zone of the TPU to use. If not specified, will use the zone specified in the config file.
**TPU Arguments**:
Arguments for options ran inside the TPU.
* `--command_file` (`str`) -- The path to the file containing the commands to run on the pod on startup.
* `--command` (`str`) -- A command to run on the pod. Can be passed multiple times.
* `--install_accelerate` (`bool`) -- Whether to install accelerate on the pod. Defaults to False.
* `--accelerate_version` (`str`) -- The version of accelerate to install on the pod. If not specified, will use the latest pypi version. Specify 'dev' to install from GitHub.
* `--debug` (`bool`) -- If set, will print the command that would be run instead of running it.
## accelerate test
`accelerate test` or `accelerate-test`
Runs `accelerate/test_utils/test_script.py` to verify that 🤗 Accelerate has been properly configured on your system and runs.
**Usage**:
```bash
accelerate test [arguments]
```
**Optional Arguments**:
* `--config_file CONFIG_FILE` (`str`) -- The path to use to store the config file. Will default to a file named default_config.yaml in the cache location, which is the content
of the environment `HF_HOME` suffixed with 'accelerate', or if you don't have such an environment variable, your cache directory
(`~/.cache` or the content of `XDG_CACHE_HOME`) suffixed with `huggingface`.
* `-h`, `--help` (`bool`) -- Show a help message and exit
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/package_reference/launchers.md
|
<!--Copyright 2022 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Launchers
Functions for launching training on distributed processes.
[[autodoc]] accelerate.notebook_launcher
[[autodoc]] accelerate.debug_launcher
| 0 |
hf_public_repos/accelerate/docs/source
|
hf_public_repos/accelerate/docs/source/package_reference/utilities.md
|
<!--Copyright 2021 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
⚠️ Note that this file is in Markdown but contain specific syntax for our doc-builder (similar to MDX) that may not be
rendered properly in your Markdown viewer.
-->
# Helpful Utilities
Below are a variety of utility functions that 🤗 Accelerate provides, broken down by use-case.
## Constants
Constants used throughout 🤗 Accelerate for reference
The following are constants used when utilizing [`Accelerator.save_state`]
`utils.MODEL_NAME`: `"pytorch_model"`
`utils.OPTIMIZER_NAME`: `"optimizer"`
`utils.RNG_STATE_NAME`: `"random_states"`
`utils.SCALER_NAME`: `"scaler.pt`
`utils.SCHEDULER_NAME`: `"scheduler`
The following are constants used when utilizing [`Accelerator.save_model`]
`utils.WEIGHTS_NAME`: `"pytorch_model.bin"`
`utils.SAFE_WEIGHTS_NAME`: `"model.safetensors"`
`utils.WEIGHTS_INDEX_NAME`: `"pytorch_model.bin.index.json"`
`utils.SAFE_WEIGHTS_INDEX_NAME`: `"model.safetensors.index.json"`
## Data Classes
These are basic dataclasses used throughout 🤗 Accelerate and they can be passed in as parameters.
[[autodoc]] utils.DistributedType
[[autodoc]] utils.DynamoBackend
[[autodoc]] utils.LoggerType
[[autodoc]] utils.PrecisionType
[[autodoc]] utils.ProjectConfiguration
## Plugins
These are plugins that can be passed to the [`Accelerator`] object. While they are defined elsewhere in the documentation,
for convience all of them are available to see here:
[[autodoc]] utils.DeepSpeedPlugin
[[autodoc]] utils.FullyShardedDataParallelPlugin
[[autodoc]] utils.GradientAccumulationPlugin
[[autodoc]] utils.MegatronLMPlugin
[[autodoc]] utils.TorchDynamoPlugin
## Data Manipulation and Operations
These include data operations that mimic the same `torch` ops but can be used on distributed processes.
[[autodoc]] utils.broadcast
[[autodoc]] utils.concatenate
[[autodoc]] utils.gather
[[autodoc]] utils.pad_across_processes
[[autodoc]] utils.reduce
[[autodoc]] utils.send_to_device
## Environment Checks
These functionalities check the state of the current working environment including information about the operating system itself, what it can support, and if particular dependencies are installed.
[[autodoc]] utils.is_bf16_available
[[autodoc]] utils.is_ipex_available
[[autodoc]] utils.is_mps_available
[[autodoc]] utils.is_npu_available
[[autodoc]] utils.is_torch_version
[[autodoc]] utils.is_tpu_available
[[autodoc]] utils.is_xpu_available
## Environment Manipulation
[[autodoc]] utils.patch_environment
[[autodoc]] utils.clear_environment
[[autodoc]] utils.write_basic_config
When setting up 🤗 Accelerate for the first time, rather than running `accelerate config` [~utils.write_basic_config] can be used as an alternative for quick configuration.
## Memory
[[autodoc]] utils.get_max_memory
[[autodoc]] utils.find_executable_batch_size
## Modeling
These utilities relate to interacting with PyTorch models
[[autodoc]] utils.extract_model_from_parallel
[[autodoc]] utils.get_max_layer_size
[[autodoc]] utils.offload_state_dict
## Parallel
These include general utilities that should be used when working in parallel.
[[autodoc]] utils.extract_model_from_parallel
[[autodoc]] utils.save
[[autodoc]] utils.wait_for_everyone
## Random
These utilities relate to setting and synchronizing of all the random states.
[[autodoc]] utils.set_seed
[[autodoc]] utils.synchronize_rng_state
[[autodoc]] utils.synchronize_rng_states
## PyTorch XLA
These include utilities that are useful while using PyTorch with XLA.
[[autodoc]] utils.install_xla
## Loading model weights
These include utilities that are useful to load checkpoints.
[[autodoc]] utils.load_checkpoint_in_model
## Quantization
These include utilities that are useful to quantize model.
[[autodoc]] utils.load_and_quantize_model
[[autodoc]] utils.BnbQuantizationConfig
| 0 |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.