default = [COCO 80 classes](https://github.com/ultralytics/ultralytics/blob/main/ultralytics/cfg/datasets/coco.yaml) | +| ADetailer prompt, negative prompt | Prompts and negative prompts to apply | If left blank, it will use the same as the input. | +| Skip img2img | Skip img2img. In practice, this works by changing the step count of img2img to 1. | img2img only | + +| Detection | | | +| ------------------------------------ | -------------------------------------------------------------------------------------------- | ------------ | +| Detection model confidence threshold | Only objects with a detection model confidence above this threshold are used for inpainting. | | +| Mask min/max ratio | Only use masks whose area is between those ratios for the area of the entire image. | | +| Mask only the top k largest | Only use the k objects with the largest area of the bbox. | 0 to disable | + +If you want to exclude objects in the background, try setting the min ratio to around `0.01`. + +| Mask Preprocessing | | | +| ------------------------------- | ----------------------------------------------------------------------------------------------------------------------------------- | --------------------------------------------------------------------------------------- | +| Mask x, y offset | Moves the mask horizontally and vertically by | | +| Mask erosion (-) / dilation (+) | Enlarge or reduce the detected mask. | [opencv example](https://docs.opencv.org/4.7.0/db/df6/tutorial_erosion_dilatation.html) | +| Mask merge mode | `None`: Inpaint each mask
`Merge`: Merge all masks and inpaint
`Merge and Invert`: Merge all masks and Invert, then inpaint | | + +Applied in this order: x, y offset → erosion/dilation → merge/invert. + +#### Inpainting + +Each option corresponds to a corresponding option on the inpaint tab. Therefore, please refer to the inpaint tab for usage details on how to use each option. + +## ControlNet Inpainting + +You can use the ControlNet extension if you have ControlNet installed and ControlNet models. + +Support `inpaint, scribble, lineart, openpose, tile, depth` controlnet models. Once you choose a model, the preprocessor is set automatically. It works separately from the model set by the Controlnet extension. + +If you select `Passthrough`, the controlnet settings you set outside of ADetailer will be used. + +## Advanced Options + +API request example: [wiki/REST-API](https://github.com/Bing-su/adetailer/wiki/REST-API) + +`[SEP], [SKIP], [PROMPT]` tokens: [wiki/Advanced](https://github.com/Bing-su/adetailer/wiki/Advanced) + +## Media + +- 🎥 [どこよりも詳しい After Detailer (adetailer)の使い方 ① 【Stable Diffusion】](https://youtu.be/sF3POwPUWCE) +- 🎥 [どこよりも詳しい After Detailer (adetailer)の使い方 ② 【Stable Diffusion】](https://youtu.be/urNISRdbIEg) + +- 📜 [ADetailer Installation and 5 Usage Methods](https://kindanai.com/en/manual-adetailer/) + +## Model + +| Model | Target | mAP 50 | mAP 50-95 | +| --------------------- | --------------------- | ----------------------------- | ----------------------------- | +| face_yolov8n.pt | 2D / realistic face | 0.660 | 0.366 | +| face_yolov8s.pt | 2D / realistic face | 0.713 | 0.404 | +| hand_yolov8n.pt | 2D / realistic hand | 0.767 | 0.505 | +| person_yolov8n-seg.pt | 2D / realistic person | 0.782 (bbox)
0.761 (mask) | 0.555 (bbox)
0.460 (mask) | +| person_yolov8s-seg.pt | 2D / realistic person | 0.824 (bbox)
0.809 (mask) | 0.605 (bbox)
0.508 (mask) | +| mediapipe_face_full | realistic face | - | - | +| mediapipe_face_short | realistic face | - | - | +| mediapipe_face_mesh | realistic face | - | - | + +The YOLO models can be found on huggingface [Bingsu/adetailer](https://huggingface.co/Bingsu/adetailer). + +For a detailed description of the YOLO8 model, see: https://docs.ultralytics.com/models/yolov8/#overview + +YOLO World model: https://docs.ultralytics.com/models/yolo-world/ + +### Additional Model + +Put your [ultralytics](https://github.com/ultralytics/ultralytics) yolo model in `models/adetailer`. The model name should end with `.pt`. + +It must be a bbox detection or segment model and use all label. + +## How it works + +ADetailer works in three simple steps. + +1. Create an image. +2. Detect object with a detection model and create a mask image. +3. Inpaint using the image from 1 and the mask from 2. + +## Development + +ADetailer is developed and tested using the stable-diffusion 1.5 model, for the latest version of [AUTOMATIC1111/stable-diffusion-webui](https://github.com/AUTOMATIC1111/stable-diffusion-webui) repository only. + +## License + +ADetailer is a derivative work that uses two AGPL-licensed works (stable-diffusion-webui, ultralytics) and is therefore distributed under the AGPL license. + +## See Also + +- https://github.com/ototadana/sd-face-editor +- https://github.com/continue-revolution/sd-webui-segment-anything +- https://github.com/portu-sim/sd-webui-bmab diff --git a/extensions/4-adetailer/Taskfile.yml b/extensions/4-adetailer/Taskfile.yml new file mode 100644 index 0000000000000000000000000000000000000000..03a4e8adff609e3d5278f2a1b97ea6eeca0327de --- /dev/null +++ b/extensions/4-adetailer/Taskfile.yml @@ -0,0 +1,32 @@ +# https://taskfile.dev + +version: "3" + +dotenv: + - .env + +tasks: + default: + cmds: + - echo "$PYTHON" + - echo "$WEBUI" + - echo "$UV_PYTHON" + silent: true + + launch: + dir: "{{.WEBUI}}" + cmds: + - "{{.PYTHON}} launch.py --xformers --api" + silent: true + + lint: + cmds: + - pre-commit run -a + + update: + cmds: + - "{{.PYTHON}} -m uv pip install -U ultralytics mediapipe ruff pre-commit black devtools pytest" + + update-torch: + cmds: + - "{{.PYTHON}} -m uv pip install -U torch torchvision torchaudio -f https://download.pytorch.org/whl/torch_stable.html" diff --git a/extensions/4-adetailer/__pycache__/preload.cpython-310.pyc b/extensions/4-adetailer/__pycache__/preload.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..37a94c52a22e263f90d4c1e11edbb739df80b56e Binary files /dev/null and b/extensions/4-adetailer/__pycache__/preload.cpython-310.pyc differ diff --git a/extensions/4-adetailer/aaaaaa/__init__.py b/extensions/4-adetailer/aaaaaa/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..e69de29bb2d1d6434b8b29ae775ad8c2e48c5391 diff --git a/extensions/4-adetailer/aaaaaa/__pycache__/__init__.cpython-310.pyc b/extensions/4-adetailer/aaaaaa/__pycache__/__init__.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..0c1f39fe4726b2416ababd6c4cc07d33cca35ee9 Binary files /dev/null and b/extensions/4-adetailer/aaaaaa/__pycache__/__init__.cpython-310.pyc differ diff --git a/extensions/4-adetailer/aaaaaa/__pycache__/conditional.cpython-310.pyc b/extensions/4-adetailer/aaaaaa/__pycache__/conditional.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..dfc3f83f0a9aaefccdb06e3f4a096e03f95dfd15 Binary files /dev/null and b/extensions/4-adetailer/aaaaaa/__pycache__/conditional.cpython-310.pyc differ diff --git a/extensions/4-adetailer/aaaaaa/__pycache__/helper.cpython-310.pyc b/extensions/4-adetailer/aaaaaa/__pycache__/helper.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..28804f004a4b5a438b7230b443c1745fb72fb189 Binary files /dev/null and b/extensions/4-adetailer/aaaaaa/__pycache__/helper.cpython-310.pyc differ diff --git a/extensions/4-adetailer/aaaaaa/__pycache__/p_method.cpython-310.pyc b/extensions/4-adetailer/aaaaaa/__pycache__/p_method.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..f4767d937f769266e70b95874eeff5b6da52cb2a Binary files /dev/null and b/extensions/4-adetailer/aaaaaa/__pycache__/p_method.cpython-310.pyc differ diff --git a/extensions/4-adetailer/aaaaaa/__pycache__/traceback.cpython-310.pyc b/extensions/4-adetailer/aaaaaa/__pycache__/traceback.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..0d184ca4aa1b33b6677bd0f8118af355ef3dbb9b Binary files /dev/null and b/extensions/4-adetailer/aaaaaa/__pycache__/traceback.cpython-310.pyc differ diff --git a/extensions/4-adetailer/aaaaaa/__pycache__/ui.cpython-310.pyc b/extensions/4-adetailer/aaaaaa/__pycache__/ui.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..9c9e25b9e1d2190a1f380f3cddcde9d1ad4b937f Binary files /dev/null and b/extensions/4-adetailer/aaaaaa/__pycache__/ui.cpython-310.pyc differ diff --git a/extensions/4-adetailer/aaaaaa/conditional.py b/extensions/4-adetailer/aaaaaa/conditional.py new file mode 100644 index 0000000000000000000000000000000000000000..22afb10140871d19cc858b9ff8887ad43b2a4932 --- /dev/null +++ b/extensions/4-adetailer/aaaaaa/conditional.py @@ -0,0 +1,21 @@ +from __future__ import annotations + +msg = "[-] ADetailer: WebUI versions below 1.6.0 are not supported." + +try: + from modules.processing import create_binary_mask # noqa: F401 +except ImportError as e: + raise RuntimeError(msg) from e + + +try: + from modules.ui_components import InputAccordion # noqa: F401 +except ImportError as e: + raise RuntimeError(msg) from e + + +try: + from modules.sd_schedulers import schedulers +except ImportError: + # webui < 1.9.0 + schedulers = [] diff --git a/extensions/4-adetailer/aaaaaa/helper.py b/extensions/4-adetailer/aaaaaa/helper.py new file mode 100644 index 0000000000000000000000000000000000000000..c9c50c9d9dd7e62c33733efde41618e39e10cf4e --- /dev/null +++ b/extensions/4-adetailer/aaaaaa/helper.py @@ -0,0 +1,59 @@ +from __future__ import annotations + +from contextlib import contextmanager +from copy import copy +from typing import TYPE_CHECKING, Any, Union + +import torch + +from modules import safe +from modules.shared import opts + +if TYPE_CHECKING: + # 타입 체커가 빨간 줄을 긋지 않게 하는 편법 + from types import SimpleNamespace + + StableDiffusionProcessingTxt2Img = SimpleNamespace + StableDiffusionProcessingImg2Img = SimpleNamespace +else: + from modules.processing import ( + StableDiffusionProcessingImg2Img, + StableDiffusionProcessingTxt2Img, + ) + +PT = Union[StableDiffusionProcessingTxt2Img, StableDiffusionProcessingImg2Img] + + +@contextmanager +def change_torch_load(): + orig = torch.load + try: + torch.load = safe.unsafe_torch_load + yield + finally: + torch.load = orig + + +@contextmanager +def pause_total_tqdm(): + orig = opts.data.get("multiple_tqdm", True) + try: + opts.data["multiple_tqdm"] = False + yield + finally: + opts.data["multiple_tqdm"] = orig + + +@contextmanager +def preserve_prompts(p: PT): + all_pt = copy(p.all_prompts) + all_ng = copy(p.all_negative_prompts) + try: + yield + finally: + p.all_prompts = all_pt + p.all_negative_prompts = all_ng + + +def copy_extra_params(extra_params: dict[str, Any]) -> dict[str, Any]: + return {k: v for k, v in extra_params.items() if not callable(v)} diff --git a/extensions/4-adetailer/aaaaaa/p_method.py b/extensions/4-adetailer/aaaaaa/p_method.py new file mode 100644 index 0000000000000000000000000000000000000000..a9dfd146bbf8c4c499ccc4ba87eb34da4b745d28 --- /dev/null +++ b/extensions/4-adetailer/aaaaaa/p_method.py @@ -0,0 +1,34 @@ +from __future__ import annotations + + +def need_call_process(p) -> bool: + if p.scripts is None: + return False + i = p.batch_index + bs = p.batch_size + return i == bs - 1 + + +def need_call_postprocess(p) -> bool: + if p.scripts is None: + return False + return p.batch_index == 0 + + +def is_img2img_inpaint(p) -> bool: + return hasattr(p, "image_mask") and p.image_mask is not None + + +def is_inpaint_only_masked(p) -> bool: + return hasattr(p, "inpaint_full_res") and p.inpaint_full_res + + +def get_i(p) -> int: + it = p.iteration + bs = p.batch_size + i = p.batch_index + return it * bs + i + + +def is_skip_img2img(p) -> bool: + return getattr(p, "_ad_skip_img2img", False) diff --git a/extensions/4-adetailer/aaaaaa/traceback.py b/extensions/4-adetailer/aaaaaa/traceback.py new file mode 100644 index 0000000000000000000000000000000000000000..3f7e44a9b6c89b39efbb825c4a65e5d126d02a48 --- /dev/null +++ b/extensions/4-adetailer/aaaaaa/traceback.py @@ -0,0 +1,175 @@ +from __future__ import annotations + +import io +import platform +import sys +from collections.abc import Callable +from importlib.metadata import version +from typing import Any, TypeVar + +from rich.console import Console, Group +from rich.panel import Panel +from rich.table import Table +from rich.traceback import Traceback +from typing_extensions import ParamSpec + +from adetailer.__version__ import __version__ +from adetailer.args import ADetailerArgs + + +def processing(*args: Any) -> dict[str, Any]: + try: + from modules.processing import ( + StableDiffusionProcessingImg2Img, + StableDiffusionProcessingTxt2Img, + ) + except ImportError: + return {} + + p = None + for arg in args: + if isinstance( + arg, (StableDiffusionProcessingTxt2Img, StableDiffusionProcessingImg2Img) + ): + p = arg + break + + if p is None: + return {} + + info = { + "prompt": p.prompt, + "negative_prompt": p.negative_prompt, + "n_iter": p.n_iter, + "batch_size": p.batch_size, + "width": p.width, + "height": p.height, + "sampler_name": p.sampler_name, + "enable_hr": getattr(p, "enable_hr", False), + "hr_upscaler": getattr(p, "hr_upscaler", ""), + } + + info.update(sd_models()) + return info + + +def sd_models() -> dict[str, str]: + try: + from modules import shared + + opts = shared.opts + except Exception: + return {} + + return { + "checkpoint": getattr(opts, "sd_model_checkpoint", "------"), + "vae": getattr(opts, "sd_vae", "------"), + "unet": getattr(opts, "sd_unet", "------"), + } + + +def ad_args(*args: Any) -> dict[str, Any]: + ad_args = [] + for arg in args: + if not isinstance(arg, dict): + continue + + try: + a = ADetailerArgs(**arg) + except ValueError: + continue + + if not a.need_skip(): + ad_args.append(a) + + if not ad_args: + return {} + + arg0 = ad_args[0] + return { + "version": __version__, + "ad_model": arg0.ad_model, + "ad_prompt": arg0.ad_prompt, + "ad_negative_prompt": arg0.ad_negative_prompt, + "ad_controlnet_model": arg0.ad_controlnet_model, + "is_api": arg0.is_api, + } + + +def library_version(): + libraries = ["torch", "torchvision", "ultralytics", "mediapipe"] + d = {} + for lib in libraries: + try: + d[lib] = version(lib) + except Exception: # noqa: PERF203 + d[lib] = "Unknown" + return d + + +def sys_info() -> dict[str, Any]: + try: + import launch + + version = launch.git_tag() + commit = launch.commit_hash() + except Exception: + version = "Unknown (too old or vladmandic)" + commit = "Unknown" + + return { + "Platform": platform.platform(), + "Python": sys.version, + "Version": version, + "Commit": commit, + "Commandline": sys.argv, + "Libraries": library_version(), + } + + +def get_table(title: str, data: dict[str, Any]) -> Table: + table = Table(title=title, highlight=True) + table.add_column(" ", justify="right", style="dim") + table.add_column("Value") + for key, value in data.items(): + if not isinstance(value, str): + value = repr(value) + table.add_row(key, value) + + return table + + +P = ParamSpec("P") +T = TypeVar("T") + + +def rich_traceback(func: Callable[P, T]) -> Callable[P, T]: + def wrapper(*args, **kwargs): + string = io.StringIO() + width = Console().width + width = width - 4 if width > 4 else None + console = Console(file=string, width=width) + try: + return func(*args, **kwargs) + except Exception as e: + tables = [ + get_table(title, data) + for title, data in [ + ("System info", sys_info()), + ("Inputs", processing(*args)), + ("ADetailer", ad_args(*args)), + ] + if data + ] + tables.append(Traceback(extra_lines=1)) + + console.print(Panel(Group(*tables))) + output = "\n" + string.getvalue() + + try: + error = e.__class__(output) + except Exception: + error = RuntimeError(output) + raise error from None + + return wrapper diff --git a/extensions/4-adetailer/aaaaaa/ui.py b/extensions/4-adetailer/aaaaaa/ui.py new file mode 100644 index 0000000000000000000000000000000000000000..e4efb5450345766ef095eb248ec8d6809b94e30f --- /dev/null +++ b/extensions/4-adetailer/aaaaaa/ui.py @@ -0,0 +1,710 @@ +from __future__ import annotations + +from dataclasses import dataclass +from functools import partial +from itertools import chain +from types import SimpleNamespace +from typing import Any + +import gradio as gr + +from aaaaaa.conditional import InputAccordion +from adetailer import ADETAILER, __version__ +from adetailer.args import ALL_ARGS, MASK_MERGE_INVERT +from controlnet_ext import controlnet_exists, controlnet_type, get_cn_models + +if controlnet_type == "forge": + from lib_controlnet import global_state + + cn_module_choices = { + "inpaint": list(global_state.get_filtered_preprocessors("Inpaint")), + "lineart": list(global_state.get_filtered_preprocessors("Lineart")), + "openpose": list(global_state.get_filtered_preprocessors("OpenPose")), + "tile": list(global_state.get_filtered_preprocessors("Tile")), + "scribble": list(global_state.get_filtered_preprocessors("Scribble")), + "depth": list(global_state.get_filtered_preprocessors("Depth")), + } +else: + cn_module_choices = { + "inpaint": [ + "inpaint_global_harmonious", + "inpaint_only", + "inpaint_only+lama", + ], + "lineart": [ + "lineart_coarse", + "lineart_realistic", + "lineart_anime", + "lineart_anime_denoise", + ], + "openpose": ["openpose_full", "dw_openpose_full"], + "tile": ["tile_resample", "tile_colorfix", "tile_colorfix+sharp"], + "scribble": ["t2ia_sketch_pidi"], + "depth": ["depth_midas", "depth_hand_refiner"], + } + +union = list(chain.from_iterable(cn_module_choices.values())) +cn_module_choices["union"] = union + + +class Widgets(SimpleNamespace): + def tolist(self): + return [getattr(self, attr) for attr in ALL_ARGS.attrs] + + +@dataclass +class WebuiInfo: + ad_model_list: list[str] + sampler_names: list[str] + scheduler_names: list[str] + t2i_button: gr.Button + i2i_button: gr.Button + checkpoints_list: list[str] + vae_list: list[str] + + +def gr_interactive(value: bool = True): + return gr.update(interactive=value) + + +def ordinal(n: int) -> str: + d = {1: "st", 2: "nd", 3: "rd"} + return str(n) + ("th" if 11 <= n % 100 <= 13 else d.get(n % 10, "th")) + + +def suffix(n: int, c: str = " ") -> str: + return "" if n == 0 else c + ordinal(n + 1) + + +def on_widget_change(state: dict, value: Any, *, attr: str): + if "is_api" in state: + state = state.copy() + state.pop("is_api") + state[attr] = value + return state + + +def on_generate_click(state: dict, *values: Any): + for attr, value in zip(ALL_ARGS.attrs, values): + state[attr] = value # noqa: PERF403 + state["is_api"] = () + return state + + +def on_ad_model_update(model: str): + if "-world" in model: + return gr.update( + visible=True, + placeholder="Comma separated class names to detect, ex: 'person,cat'. default: COCO 80 classes", + ) + return gr.update(visible=False, placeholder="") + + +def on_cn_model_update(cn_model_name: str): + cn_model_name = cn_model_name.replace("inpaint_depth", "depth") + for t in cn_module_choices: + if t in cn_model_name: + choices = cn_module_choices[t] + return gr.update(visible=True, choices=choices, value=choices[0]) + return gr.update(visible=False, choices=["None"], value="None") + + +def elem_id(item_id: str, n: int, is_img2img: bool) -> str: + tab = "img2img" if is_img2img else "txt2img" + suf = suffix(n, "_") + return f"script_{tab}_adetailer_{item_id}{suf}" + + +def state_init(w: Widgets) -> dict[str, Any]: + return {attr: getattr(w, attr).value for attr in ALL_ARGS.attrs} + + +def adui( + num_models: int, + is_img2img: bool, + webui_info: WebuiInfo, +): + states = [] + infotext_fields = [] + eid = partial(elem_id, n=0, is_img2img=is_img2img) + + with InputAccordion( + value=False, + elem_id=eid("ad_main_accordion"), + label=ADETAILER, + visible=True, + ) as ad_enable: + with gr.Row(): + with gr.Column(scale=8): + ad_skip_img2img = gr.Checkbox( + label="Skip img2img", + value=False, + visible=is_img2img, + elem_id=eid("ad_skip_img2img"), + ) + + with gr.Column(scale=1, min_width=180): + gr.Markdown( + f"v{__version__}", + elem_id=eid("ad_version"), + ) + + infotext_fields.append((ad_enable, "ADetailer enable")) + infotext_fields.append((ad_skip_img2img, "ADetailer skip img2img")) + + with gr.Group(), gr.Tabs(): + for n in range(num_models): + with gr.Tab(ordinal(n + 1)): + state, infofields = one_ui_group( + n=n, + is_img2img=is_img2img, + webui_info=webui_info, + ) + + states.append(state) + infotext_fields.extend(infofields) + + # components: [bool, bool, dict, dict, ...] + components = [ad_enable, ad_skip_img2img, *states] + return components, infotext_fields + + +def one_ui_group(n: int, is_img2img: bool, webui_info: WebuiInfo): + w = Widgets() + eid = partial(elem_id, n=n, is_img2img=is_img2img) + + model_choices = ( + [*webui_info.ad_model_list, "None"] + if n == 0 + else ["None", *webui_info.ad_model_list] + ) + + with gr.Group(): + with gr.Row(variant="compact"): + w.ad_tab_enable = gr.Checkbox( + label=f"Enable this tab ({ordinal(n + 1)})", + value=True, + visible=True, + elem_id=eid("ad_tab_enable"), + ) + + with gr.Row(): + w.ad_model = gr.Dropdown( + label="ADetailer detector" + suffix(n), + choices=model_choices, + value=model_choices[0], + visible=True, + type="value", + elem_id=eid("ad_model"), + info="Select a model to use for detection.", + ) + + with gr.Row(): + w.ad_model_classes = gr.Textbox( + label="ADetailer detector classes" + suffix(n), + value="", + visible=False, + elem_id=eid("ad_classes"), + ) + + w.ad_model.change( + on_ad_model_update, + inputs=w.ad_model, + outputs=w.ad_model_classes, + queue=False, + ) + + gr.HTML("
") + + with gr.Group(): + with gr.Row(elem_id=eid("ad_toprow_prompt")): + w.ad_prompt = gr.Textbox( + label="ad_prompt" + suffix(n), + show_label=False, + lines=3, + placeholder="ADetailer prompt" + + suffix(n) + + "\nIf blank, the main prompt is used.", + elem_id=eid("ad_prompt"), + ) + + with gr.Row(elem_id=eid("ad_toprow_negative_prompt")): + w.ad_negative_prompt = gr.Textbox( + label="ad_negative_prompt" + suffix(n), + show_label=False, + lines=2, + placeholder="ADetailer negative prompt" + + suffix(n) + + "\nIf blank, the main negative prompt is used.", + elem_id=eid("ad_negative_prompt"), + ) + + with gr.Group(): + with gr.Accordion( + "Detection", open=False, elem_id=eid("ad_detection_accordion") + ): + detection(w, n, is_img2img) + + with gr.Accordion( + "Mask Preprocessing", + open=False, + elem_id=eid("ad_mask_preprocessing_accordion"), + ): + mask_preprocessing(w, n, is_img2img) + + with gr.Accordion( + "Inpainting", open=False, elem_id=eid("ad_inpainting_accordion") + ): + inpainting(w, n, is_img2img, webui_info) + + with gr.Group(): + controlnet(w, n, is_img2img) + + state = gr.State(lambda: state_init(w)) + + for attr in ALL_ARGS.attrs: + widget = getattr(w, attr) + on_change = partial(on_widget_change, attr=attr) + widget.change(fn=on_change, inputs=[state, widget], outputs=state, queue=False) + + all_inputs = [state, *w.tolist()] + target_button = webui_info.i2i_button if is_img2img else webui_info.t2i_button + target_button.click( + fn=on_generate_click, inputs=all_inputs, outputs=state, queue=False + ) + + infotext_fields = [(getattr(w, attr), name + suffix(n)) for attr, name in ALL_ARGS] + + return state, infotext_fields + + +def detection(w: Widgets, n: int, is_img2img: bool): + eid = partial(elem_id, n=n, is_img2img=is_img2img) + + with gr.Row(): + with gr.Column(variant="compact"): + w.ad_confidence = gr.Slider( + label="Detection model confidence threshold" + suffix(n), + minimum=0.0, + maximum=1.0, + step=0.01, + value=0.3, + visible=True, + elem_id=eid("ad_confidence"), + ) + w.ad_mask_k_largest = gr.Slider( + label="Mask only the top k largest (0 to disable)" + suffix(n), + minimum=0, + maximum=10, + step=1, + value=0, + visible=True, + elem_id=eid("ad_mask_k_largest"), + ) + + with gr.Column(variant="compact"): + w.ad_mask_min_ratio = gr.Slider( + label="Mask min area ratio" + suffix(n), + minimum=0.0, + maximum=1.0, + step=0.001, + value=0.0, + visible=True, + elem_id=eid("ad_mask_min_ratio"), + ) + w.ad_mask_max_ratio = gr.Slider( + label="Mask max area ratio" + suffix(n), + minimum=0.0, + maximum=1.0, + step=0.001, + value=1.0, + visible=True, + elem_id=eid("ad_mask_max_ratio"), + ) + + +def mask_preprocessing(w: Widgets, n: int, is_img2img: bool): + eid = partial(elem_id, n=n, is_img2img=is_img2img) + + with gr.Group(): + with gr.Row(): + with gr.Column(variant="compact"): + w.ad_x_offset = gr.Slider( + label="Mask x(→) offset" + suffix(n), + minimum=-200, + maximum=200, + step=1, + value=0, + visible=True, + elem_id=eid("ad_x_offset"), + ) + w.ad_y_offset = gr.Slider( + label="Mask y(↑) offset" + suffix(n), + minimum=-200, + maximum=200, + step=1, + value=0, + visible=True, + elem_id=eid("ad_y_offset"), + ) + + with gr.Column(variant="compact"): + w.ad_dilate_erode = gr.Slider( + label="Mask erosion (-) / dilation (+)" + suffix(n), + minimum=-128, + maximum=128, + step=4, + value=4, + visible=True, + elem_id=eid("ad_dilate_erode"), + ) + + with gr.Row(): + w.ad_mask_merge_invert = gr.Radio( + label="Mask merge mode" + suffix(n), + choices=MASK_MERGE_INVERT, + value="None", + elem_id=eid("ad_mask_merge_invert"), + info="None: do nothing, Merge: merge masks, Merge and Invert: merge all masks and invert", + ) + + +def inpainting(w: Widgets, n: int, is_img2img: bool, webui_info: WebuiInfo): + eid = partial(elem_id, n=n, is_img2img=is_img2img) + + with gr.Group(): + with gr.Row(): + w.ad_mask_blur = gr.Slider( + label="Inpaint mask blur" + suffix(n), + minimum=0, + maximum=64, + step=1, + value=4, + visible=True, + elem_id=eid("ad_mask_blur"), + ) + + w.ad_denoising_strength = gr.Slider( + label="Inpaint denoising strength" + suffix(n), + minimum=0.0, + maximum=1.0, + step=0.01, + value=0.4, + visible=True, + elem_id=eid("ad_denoising_strength"), + ) + + with gr.Row(): + with gr.Column(variant="compact"): + w.ad_inpaint_only_masked = gr.Checkbox( + label="Inpaint only masked" + suffix(n), + value=True, + visible=True, + elem_id=eid("ad_inpaint_only_masked"), + ) + w.ad_inpaint_only_masked_padding = gr.Slider( + label="Inpaint only masked padding, pixels" + suffix(n), + minimum=0, + maximum=256, + step=4, + value=32, + visible=True, + elem_id=eid("ad_inpaint_only_masked_padding"), + ) + + w.ad_inpaint_only_masked.change( + gr_interactive, + inputs=w.ad_inpaint_only_masked, + outputs=w.ad_inpaint_only_masked_padding, + queue=False, + ) + + with gr.Column(variant="compact"): + w.ad_use_inpaint_width_height = gr.Checkbox( + label="Use separate width/height" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_inpaint_width_height"), + ) + + w.ad_inpaint_width = gr.Slider( + label="inpaint width" + suffix(n), + minimum=64, + maximum=2048, + step=4, + value=512, + visible=True, + elem_id=eid("ad_inpaint_width"), + ) + + w.ad_inpaint_height = gr.Slider( + label="inpaint height" + suffix(n), + minimum=64, + maximum=2048, + step=4, + value=512, + visible=True, + elem_id=eid("ad_inpaint_height"), + ) + + w.ad_use_inpaint_width_height.change( + lambda value: (gr_interactive(value), gr_interactive(value)), + inputs=w.ad_use_inpaint_width_height, + outputs=[w.ad_inpaint_width, w.ad_inpaint_height], + queue=False, + ) + + with gr.Row(): + with gr.Column(variant="compact"): + w.ad_use_steps = gr.Checkbox( + label="Use separate steps" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_steps"), + ) + + w.ad_steps = gr.Slider( + label="ADetailer steps" + suffix(n), + minimum=1, + maximum=150, + step=1, + value=28, + visible=True, + elem_id=eid("ad_steps"), + ) + + w.ad_use_steps.change( + gr_interactive, + inputs=w.ad_use_steps, + outputs=w.ad_steps, + queue=False, + ) + + with gr.Column(variant="compact"): + w.ad_use_cfg_scale = gr.Checkbox( + label="Use separate CFG scale" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_cfg_scale"), + ) + + w.ad_cfg_scale = gr.Slider( + label="ADetailer CFG scale" + suffix(n), + minimum=0.0, + maximum=30.0, + step=0.5, + value=7.0, + visible=True, + elem_id=eid("ad_cfg_scale"), + ) + + w.ad_use_cfg_scale.change( + gr_interactive, + inputs=w.ad_use_cfg_scale, + outputs=w.ad_cfg_scale, + queue=False, + ) + + with gr.Row(): + with gr.Column(variant="compact"): + w.ad_use_checkpoint = gr.Checkbox( + label="Use separate checkpoint" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_checkpoint"), + ) + + ckpts = ["Use same checkpoint", *webui_info.checkpoints_list] + + w.ad_checkpoint = gr.Dropdown( + label="ADetailer checkpoint" + suffix(n), + choices=ckpts, + value=ckpts[0], + visible=True, + elem_id=eid("ad_checkpoint"), + ) + + with gr.Column(variant="compact"): + w.ad_use_vae = gr.Checkbox( + label="Use separate VAE" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_vae"), + ) + + vaes = ["Use same VAE", *webui_info.vae_list] + + w.ad_vae = gr.Dropdown( + label="ADetailer VAE" + suffix(n), + choices=vaes, + value=vaes[0], + visible=True, + elem_id=eid("ad_vae"), + ) + + with gr.Row(), gr.Column(variant="compact"): + w.ad_use_sampler = gr.Checkbox( + label="Use separate sampler" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_sampler"), + ) + + sampler_names = [ + "Use same sampler", + *webui_info.sampler_names, + ] + + with gr.Row(): + w.ad_sampler = gr.Dropdown( + label="ADetailer sampler" + suffix(n), + choices=sampler_names, + value=sampler_names[1], + visible=True, + elem_id=eid("ad_sampler"), + ) + + scheduler_names = [ + "Use same scheduler", + *webui_info.scheduler_names, + ] + w.ad_scheduler = gr.Dropdown( + label="ADetailer scheduler" + suffix(n), + choices=scheduler_names, + value=scheduler_names[0], + visible=len(scheduler_names) > 1, + elem_id=eid("ad_scheduler"), + ) + + w.ad_use_sampler.change( + lambda value: (gr_interactive(value), gr_interactive(value)), + inputs=w.ad_use_sampler, + outputs=[w.ad_sampler, w.ad_scheduler], + queue=False, + ) + + with gr.Row(): + with gr.Column(variant="compact"): + w.ad_use_noise_multiplier = gr.Checkbox( + label="Use separate noise multiplier" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_noise_multiplier"), + ) + + w.ad_noise_multiplier = gr.Slider( + label="Noise multiplier for img2img" + suffix(n), + minimum=0.5, + maximum=1.5, + step=0.01, + value=1.0, + visible=True, + elem_id=eid("ad_noise_multiplier"), + ) + + w.ad_use_noise_multiplier.change( + gr_interactive, + inputs=w.ad_use_noise_multiplier, + outputs=w.ad_noise_multiplier, + queue=False, + ) + + with gr.Column(variant="compact"): + w.ad_use_clip_skip = gr.Checkbox( + label="Use separate CLIP skip" + suffix(n), + value=False, + visible=True, + elem_id=eid("ad_use_clip_skip"), + ) + + w.ad_clip_skip = gr.Slider( + label="ADetailer CLIP skip" + suffix(n), + minimum=1, + maximum=12, + step=1, + value=1, + visible=True, + elem_id=eid("ad_clip_skip"), + ) + + w.ad_use_clip_skip.change( + gr_interactive, + inputs=w.ad_use_clip_skip, + outputs=w.ad_clip_skip, + queue=False, + ) + + with gr.Row(), gr.Column(variant="compact"): + w.ad_restore_face = gr.Checkbox( + label="Restore faces after ADetailer" + suffix(n), + value=False, + elem_id=eid("ad_restore_face"), + ) + + +def controlnet(w: Widgets, n: int, is_img2img: bool): + eid = partial(elem_id, n=n, is_img2img=is_img2img) + cn_models = ["None", "Passthrough", *get_cn_models()] + + with gr.Row(variant="panel"): + with gr.Column(variant="compact"): + w.ad_controlnet_model = gr.Dropdown( + label="ControlNet model" + suffix(n), + choices=cn_models, + value="None", + visible=True, + type="value", + interactive=controlnet_exists, + elem_id=eid("ad_controlnet_model"), + ) + + w.ad_controlnet_module = gr.Dropdown( + label="ControlNet module" + suffix(n), + choices=["None"], + value="None", + visible=False, + type="value", + interactive=controlnet_exists, + elem_id=eid("ad_controlnet_module"), + ) + + w.ad_controlnet_weight = gr.Slider( + label="ControlNet weight" + suffix(n), + minimum=0.0, + maximum=1.0, + step=0.01, + value=1.0, + visible=True, + interactive=controlnet_exists, + elem_id=eid("ad_controlnet_weight"), + ) + + w.ad_controlnet_model.change( + on_cn_model_update, + inputs=w.ad_controlnet_model, + outputs=w.ad_controlnet_module, + queue=False, + ) + + with gr.Column(variant="compact"): + w.ad_controlnet_guidance_start = gr.Slider( + label="ControlNet guidance start" + suffix(n), + minimum=0.0, + maximum=1.0, + step=0.01, + value=0.0, + visible=True, + interactive=controlnet_exists, + elem_id=eid("ad_controlnet_guidance_start"), + ) + + w.ad_controlnet_guidance_end = gr.Slider( + label="ControlNet guidance end" + suffix(n), + minimum=0.0, + maximum=1.0, + step=0.01, + value=1.0, + visible=True, + interactive=controlnet_exists, + elem_id=eid("ad_controlnet_guidance_end"), + ) diff --git a/extensions/4-adetailer/adetailer/__init__.py b/extensions/4-adetailer/adetailer/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..6e6721e455cd9172c62b3a44c44a30fabaea12af --- /dev/null +++ b/extensions/4-adetailer/adetailer/__init__.py @@ -0,0 +1,18 @@ +from .__version__ import __version__ +from .args import ALL_ARGS, ADetailerArgs +from .common import PredictOutput, get_models +from .mediapipe import mediapipe_predict +from .ultralytics import ultralytics_predict + +ADETAILER = "ADetailer" + +__all__ = [ + "__version__", + "ADetailerArgs", + "ADETAILER", + "ALL_ARGS", + "PredictOutput", + "get_models", + "mediapipe_predict", + "ultralytics_predict", +] diff --git a/extensions/4-adetailer/adetailer/__pycache__/__init__.cpython-310.pyc b/extensions/4-adetailer/adetailer/__pycache__/__init__.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..607020ae6ee00e9c8aa48b71267de6aa54f9a3a5 Binary files /dev/null and b/extensions/4-adetailer/adetailer/__pycache__/__init__.cpython-310.pyc differ diff --git a/extensions/4-adetailer/adetailer/__pycache__/__version__.cpython-310.pyc b/extensions/4-adetailer/adetailer/__pycache__/__version__.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..e0f727ad3b562681fc33ac2ad32e21c3275ed520 Binary files /dev/null and b/extensions/4-adetailer/adetailer/__pycache__/__version__.cpython-310.pyc differ diff --git a/extensions/4-adetailer/adetailer/__pycache__/args.cpython-310.pyc b/extensions/4-adetailer/adetailer/__pycache__/args.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..a74a52f4e8cfe74d109dbc1fdd417b1d3742c5b4 Binary files /dev/null and b/extensions/4-adetailer/adetailer/__pycache__/args.cpython-310.pyc differ diff --git a/extensions/4-adetailer/adetailer/__pycache__/common.cpython-310.pyc b/extensions/4-adetailer/adetailer/__pycache__/common.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..4404ec202753987a7f1c5234def7bd1cfc0e0a63 Binary files /dev/null and b/extensions/4-adetailer/adetailer/__pycache__/common.cpython-310.pyc differ diff --git a/extensions/4-adetailer/adetailer/__pycache__/mask.cpython-310.pyc b/extensions/4-adetailer/adetailer/__pycache__/mask.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..4b7bbf329540dc73f612713c6ea2d00a0c6ce9e7 Binary files /dev/null and b/extensions/4-adetailer/adetailer/__pycache__/mask.cpython-310.pyc differ diff --git a/extensions/4-adetailer/adetailer/__pycache__/mediapipe.cpython-310.pyc b/extensions/4-adetailer/adetailer/__pycache__/mediapipe.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..4823d86faded365023168e930988f7b062a99afc Binary files /dev/null and b/extensions/4-adetailer/adetailer/__pycache__/mediapipe.cpython-310.pyc differ diff --git a/extensions/4-adetailer/adetailer/__pycache__/ultralytics.cpython-310.pyc b/extensions/4-adetailer/adetailer/__pycache__/ultralytics.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..9a66e88cc82b9e09a8aecae7e4f52aca589896ce Binary files /dev/null and b/extensions/4-adetailer/adetailer/__pycache__/ultralytics.cpython-310.pyc differ diff --git a/extensions/4-adetailer/adetailer/__version__.py b/extensions/4-adetailer/adetailer/__version__.py new file mode 100644 index 0000000000000000000000000000000000000000..45adadaa041a479fe286d7f09643f19e29be9bfa --- /dev/null +++ b/extensions/4-adetailer/adetailer/__version__.py @@ -0,0 +1 @@ +__version__ = "24.8.0" diff --git a/extensions/4-adetailer/adetailer/args.py b/extensions/4-adetailer/adetailer/args.py new file mode 100644 index 0000000000000000000000000000000000000000..ebfd2c020005a8308e1f9de4f37229d568682065 --- /dev/null +++ b/extensions/4-adetailer/adetailer/args.py @@ -0,0 +1,278 @@ +from __future__ import annotations + +from collections import UserList +from dataclasses import dataclass +from functools import cached_property, partial +from typing import Any, Literal, NamedTuple, Optional + +try: + from pydantic.v1 import ( + BaseModel, + Extra, + NonNegativeFloat, + NonNegativeInt, + PositiveInt, + confloat, + conint, + validator, + ) +except ImportError: + from pydantic import ( + BaseModel, + Extra, + NonNegativeFloat, + NonNegativeInt, + PositiveInt, + confloat, + conint, + validator, + ) + + +@dataclass +class SkipImg2ImgOrig: + steps: int + sampler_name: str + width: int + height: int + + +class Arg(NamedTuple): + attr: str + name: str + + +class ArgsList(UserList): + @cached_property + def attrs(self) -> tuple[str, ...]: + return tuple(attr for attr, _ in self) + + @cached_property + def names(self) -> tuple[str, ...]: + return tuple(name for _, name in self) + + +class ADetailerArgs(BaseModel, extra=Extra.forbid): + ad_model: str = "None" + ad_model_classes: str = "" + ad_tab_enable: bool = True + ad_prompt: str = "" + ad_negative_prompt: str = "" + ad_confidence: confloat(ge=0.0, le=1.0) = 0.3 + ad_mask_k_largest: NonNegativeInt = 0 + ad_mask_min_ratio: confloat(ge=0.0, le=1.0) = 0.0 + ad_mask_max_ratio: confloat(ge=0.0, le=1.0) = 1.0 + ad_dilate_erode: int = 4 + ad_x_offset: int = 0 + ad_y_offset: int = 0 + ad_mask_merge_invert: Literal["None", "Merge", "Merge and Invert"] = "None" + ad_mask_blur: NonNegativeInt = 4 + ad_denoising_strength: confloat(ge=0.0, le=1.0) = 0.4 + ad_inpaint_only_masked: bool = True + ad_inpaint_only_masked_padding: NonNegativeInt = 32 + ad_use_inpaint_width_height: bool = False + ad_inpaint_width: PositiveInt = 512 + ad_inpaint_height: PositiveInt = 512 + ad_use_steps: bool = False + ad_steps: PositiveInt = 28 + ad_use_cfg_scale: bool = False + ad_cfg_scale: NonNegativeFloat = 7.0 + ad_use_checkpoint: bool = False + ad_checkpoint: Optional[str] = None + ad_use_vae: bool = False + ad_vae: Optional[str] = None + ad_use_sampler: bool = False + ad_sampler: str = "DPM++ 2M Karras" + ad_scheduler: str = "Use same scheduler" + ad_use_noise_multiplier: bool = False + ad_noise_multiplier: confloat(ge=0.5, le=1.5) = 1.0 + ad_use_clip_skip: bool = False + ad_clip_skip: conint(ge=1, le=12) = 1 + ad_restore_face: bool = False + ad_controlnet_model: str = "None" + ad_controlnet_module: str = "None" + ad_controlnet_weight: confloat(ge=0.0, le=1.0) = 1.0 + ad_controlnet_guidance_start: confloat(ge=0.0, le=1.0) = 0.0 + ad_controlnet_guidance_end: confloat(ge=0.0, le=1.0) = 1.0 + is_api: bool = True + + @validator("is_api", pre=True) + def is_api_validator(cls, v: Any): # noqa: N805 + "tuple is json serializable but cannot be made with json deserialize." + return type(v) is not tuple + + @staticmethod + def ppop( + p: dict[str, Any], + key: str, + pops: list[str] | None = None, + cond: Any = None, + ) -> None: + if pops is None: + pops = [key] + if key not in p: + return + value = p[key] + cond = (not bool(value)) if cond is None else value == cond + + if cond: + for k in pops: + p.pop(k, None) + + def extra_params(self, suffix: str = "") -> dict[str, Any]: + if self.need_skip(): + return {} + + p = {name: getattr(self, attr) for attr, name in ALL_ARGS} + ppop = partial(self.ppop, p) + + ppop("ADetailer model classes") + ppop("ADetailer prompt") + ppop("ADetailer negative prompt") + p.pop("ADetailer tab enable", None) # always pop + ppop("ADetailer mask only top k largest", cond=0) + ppop("ADetailer mask min ratio", cond=0.0) + ppop("ADetailer mask max ratio", cond=1.0) + ppop("ADetailer x offset", cond=0) + ppop("ADetailer y offset", cond=0) + ppop("ADetailer mask merge invert", cond="None") + ppop("ADetailer inpaint only masked", ["ADetailer inpaint padding"]) + ppop( + "ADetailer use inpaint width height", + [ + "ADetailer use inpaint width height", + "ADetailer inpaint width", + "ADetailer inpaint height", + ], + ) + ppop( + "ADetailer use separate steps", + ["ADetailer use separate steps", "ADetailer steps"], + ) + ppop( + "ADetailer use separate CFG scale", + ["ADetailer use separate CFG scale", "ADetailer CFG scale"], + ) + ppop( + "ADetailer use separate checkpoint", + ["ADetailer use separate checkpoint", "ADetailer checkpoint"], + ) + ppop( + "ADetailer use separate VAE", + ["ADetailer use separate VAE", "ADetailer VAE"], + ) + ppop( + "ADetailer use separate sampler", + [ + "ADetailer use separate sampler", + "ADetailer sampler", + "ADetailer scheduler", + ], + ) + ppop("ADetailer scheduler", cond="Use same scheduler") + ppop( + "ADetailer use separate noise multiplier", + ["ADetailer use separate noise multiplier", "ADetailer noise multiplier"], + ) + + ppop( + "ADetailer use separate CLIP skip", + ["ADetailer use separate CLIP skip", "ADetailer CLIP skip"], + ) + + ppop("ADetailer restore face") + ppop( + "ADetailer ControlNet model", + [ + "ADetailer ControlNet model", + "ADetailer ControlNet module", + "ADetailer ControlNet weight", + "ADetailer ControlNet guidance start", + "ADetailer ControlNet guidance end", + ], + cond="None", + ) + ppop("ADetailer ControlNet module", cond="None") + ppop("ADetailer ControlNet weight", cond=1.0) + ppop("ADetailer ControlNet guidance start", cond=0.0) + ppop("ADetailer ControlNet guidance end", cond=1.0) + + if suffix: + p = {k + suffix: v for k, v in p.items()} + + return p + + def is_mediapipe(self) -> bool: + return self.ad_model.lower().startswith("mediapipe") + + def need_skip(self) -> bool: + return self.ad_model == "None" or self.ad_tab_enable is False + + +_all_args = [ + ("ad_model", "ADetailer model"), + ("ad_model_classes", "ADetailer model classes"), + ("ad_tab_enable", "ADetailer tab enable"), + ("ad_prompt", "ADetailer prompt"), + ("ad_negative_prompt", "ADetailer negative prompt"), + ("ad_confidence", "ADetailer confidence"), + ("ad_mask_k_largest", "ADetailer mask only top k largest"), + ("ad_mask_min_ratio", "ADetailer mask min ratio"), + ("ad_mask_max_ratio", "ADetailer mask max ratio"), + ("ad_x_offset", "ADetailer x offset"), + ("ad_y_offset", "ADetailer y offset"), + ("ad_dilate_erode", "ADetailer dilate erode"), + ("ad_mask_merge_invert", "ADetailer mask merge invert"), + ("ad_mask_blur", "ADetailer mask blur"), + ("ad_denoising_strength", "ADetailer denoising strength"), + ("ad_inpaint_only_masked", "ADetailer inpaint only masked"), + ("ad_inpaint_only_masked_padding", "ADetailer inpaint padding"), + ("ad_use_inpaint_width_height", "ADetailer use inpaint width height"), + ("ad_inpaint_width", "ADetailer inpaint width"), + ("ad_inpaint_height", "ADetailer inpaint height"), + ("ad_use_steps", "ADetailer use separate steps"), + ("ad_steps", "ADetailer steps"), + ("ad_use_cfg_scale", "ADetailer use separate CFG scale"), + ("ad_cfg_scale", "ADetailer CFG scale"), + ("ad_use_checkpoint", "ADetailer use separate checkpoint"), + ("ad_checkpoint", "ADetailer checkpoint"), + ("ad_use_vae", "ADetailer use separate VAE"), + ("ad_vae", "ADetailer VAE"), + ("ad_use_sampler", "ADetailer use separate sampler"), + ("ad_sampler", "ADetailer sampler"), + ("ad_scheduler", "ADetailer scheduler"), + ("ad_use_noise_multiplier", "ADetailer use separate noise multiplier"), + ("ad_noise_multiplier", "ADetailer noise multiplier"), + ("ad_use_clip_skip", "ADetailer use separate CLIP skip"), + ("ad_clip_skip", "ADetailer CLIP skip"), + ("ad_restore_face", "ADetailer restore face"), + ("ad_controlnet_model", "ADetailer ControlNet model"), + ("ad_controlnet_module", "ADetailer ControlNet module"), + ("ad_controlnet_weight", "ADetailer ControlNet weight"), + ("ad_controlnet_guidance_start", "ADetailer ControlNet guidance start"), + ("ad_controlnet_guidance_end", "ADetailer ControlNet guidance end"), +] + +_args = [Arg(*args) for args in _all_args] +ALL_ARGS = ArgsList(_args) + +BBOX_SORTBY = [ + "None", + "Position (left to right)", + "Position (center to edge)", + "Area (large to small)", +] +MASK_MERGE_INVERT = ["None", "Merge", "Merge and Invert"] + +_script_default = ( + "dynamic_prompting", + "dynamic_thresholding", + "wildcard_recursive", + "wildcards", + "lora_block_weight", + "negpip", +) +SCRIPT_DEFAULT = ",".join(sorted(_script_default)) + +_builtin_script = ("soft_inpainting", "hypertile_script") +BUILTIN_SCRIPT = ",".join(sorted(_builtin_script)) diff --git a/extensions/4-adetailer/adetailer/common.py b/extensions/4-adetailer/adetailer/common.py new file mode 100644 index 0000000000000000000000000000000000000000..f9e42fcc688cee5aacde3aba400542268513e662 --- /dev/null +++ b/extensions/4-adetailer/adetailer/common.py @@ -0,0 +1,178 @@ +from __future__ import annotations + +import os +from collections import OrderedDict +from concurrent.futures import ThreadPoolExecutor +from contextlib import suppress +from dataclasses import dataclass, field +from pathlib import Path +from typing import Any, Generic, Optional, TypeVar + +from huggingface_hub import hf_hub_download +from PIL import Image, ImageDraw +from rich import print +from torchvision.transforms.functional import to_pil_image + +REPO_ID = "Bingsu/adetailer" + +T = TypeVar("T", int, float) + + +@dataclass +class PredictOutput(Generic[T]): + bboxes: list[list[T]] = field(default_factory=list) + masks: list[Image.Image] = field(default_factory=list) + preview: Optional[Image.Image] = None + + +def hf_download(file: str, repo_id: str = REPO_ID, check_remote: bool = True) -> str: + if check_remote: + with suppress(Exception): + return hf_hub_download(repo_id, file, etag_timeout=1) + + with suppress(Exception): + return hf_hub_download( + repo_id, file, etag_timeout=1, endpoint="https://hf-mirror.com" + ) + + with suppress(Exception): + return hf_hub_download(repo_id, file, local_files_only=True) + + msg = f"[-] ADetailer: Failed to load model {file!r} from huggingface" + print(msg) + return "INVALID" + + +def safe_mkdir(path: str | os.PathLike[str]) -> None: + path = Path(path) + if not path.exists() and path.parent.exists() and os.access(path.parent, os.W_OK): + path.mkdir() + + +def scan_model_dir(path: Path) -> list[Path]: + if not path.is_dir(): + return [] + return [p for p in path.rglob("*") if p.is_file() and p.suffix == ".pt"] + + +def download_models(*names: str, check_remote: bool = True) -> dict[str, str]: + models = OrderedDict() + with ThreadPoolExecutor() as executor: + for name in names: + if "-world" in name: + models[name] = executor.submit( + hf_download, + name, + repo_id="Bingsu/yolo-world-mirror", + check_remote=check_remote, + ) + else: + models[name] = executor.submit( + hf_download, + name, + check_remote=check_remote, + ) + return {name: future.result() for name, future in models.items()} + + +def get_models( + *dirs: str | os.PathLike[str], huggingface: bool = True +) -> OrderedDict[str, str]: + model_paths = [] + + for dir_ in dirs: + if not dir_: + continue + model_paths.extend(scan_model_dir(Path(dir_))) + + models = OrderedDict() + to_download = [ + "face_yolov8n.pt", + "face_yolov8s.pt", + "hand_yolov8n.pt", + "person_yolov8n-seg.pt", + "person_yolov8s-seg.pt", + "yolov8x-worldv2.pt", + ] + models.update(download_models(*to_download, check_remote=huggingface)) + + models.update( + { + "mediapipe_face_full": "mediapipe_face_full", + "mediapipe_face_short": "mediapipe_face_short", + "mediapipe_face_mesh": "mediapipe_face_mesh", + "mediapipe_face_mesh_eyes_only": "mediapipe_face_mesh_eyes_only", + } + ) + + invalid_keys = [k for k, v in models.items() if v == "INVALID"] + for key in invalid_keys: + models.pop(key) + + for path in model_paths: + if path.name in models: + continue + models[path.name] = str(path) + + return models + + +def create_mask_from_bbox( + bboxes: list[list[float]], shape: tuple[int, int] +) -> list[Image.Image]: + """ + Parameters + ---------- + bboxes: list[list[float]] + list of [x1, y1, x2, y2] + bounding boxes + shape: tuple[int, int] + shape of the image (width, height) + + Returns + ------- + masks: list[Image.Image] + A list of masks + + """ + masks = [] + for bbox in bboxes: + mask = Image.new("L", shape, 0) + mask_draw = ImageDraw.Draw(mask) + mask_draw.rectangle(bbox, fill=255) + masks.append(mask) + return masks + + +def create_bbox_from_mask( + masks: list[Image.Image], shape: tuple[int, int] +) -> list[list[int]]: + """ + Parameters + ---------- + masks: list[Image.Image] + A list of masks + shape: tuple[int, int] + shape of the image (width, height) + + Returns + ------- + bboxes: list[list[float]] + A list of bounding boxes + + """ + bboxes = [] + for mask in masks: + mask = mask.resize(shape) + bbox = mask.getbbox() + if bbox is not None: + bboxes.append(list(bbox)) + return bboxes + + +def ensure_pil_image(image: Any, mode: str = "RGB") -> Image.Image: + if not isinstance(image, Image.Image): + image = to_pil_image(image) + if image.mode != mode: + image = image.convert(mode) + return image diff --git a/extensions/4-adetailer/adetailer/mask.py b/extensions/4-adetailer/adetailer/mask.py new file mode 100644 index 0000000000000000000000000000000000000000..9496aa4450df0088da512ad26fda1a471152e197 --- /dev/null +++ b/extensions/4-adetailer/adetailer/mask.py @@ -0,0 +1,269 @@ +from __future__ import annotations + +from enum import IntEnum +from functools import partial, reduce +from math import dist +from typing import Any, TypeVar + +import cv2 +import numpy as np +from PIL import Image, ImageChops + +from adetailer.args import MASK_MERGE_INVERT +from adetailer.common import PredictOutput, ensure_pil_image + + +class SortBy(IntEnum): + NONE = 0 + LEFT_TO_RIGHT = 1 + CENTER_TO_EDGE = 2 + AREA = 3 + + +class MergeInvert(IntEnum): + NONE = 0 + MERGE = 1 + MERGE_INVERT = 2 + + +T = TypeVar("T", int, float) + + +def _dilate(arr: np.ndarray, value: int) -> np.ndarray: + kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (value, value)) + return cv2.dilate(arr, kernel, iterations=1) + + +def _erode(arr: np.ndarray, value: int) -> np.ndarray: + kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (value, value)) + return cv2.erode(arr, kernel, iterations=1) + + +def dilate_erode(img: Image.Image, value: int) -> Image.Image: + """ + The dilate_erode function takes an image and a value. + If the value is positive, it dilates the image by that amount. + If the value is negative, it erodes the image by that amount. + + Parameters + ---------- + img: PIL.Image.Image + the image to be processed + value: int + kernel size of dilation or erosion + + Returns + ------- + PIL.Image.Image + The image that has been dilated or eroded + """ + if value == 0: + return img + + arr = np.array(img) + arr = _dilate(arr, value) if value > 0 else _erode(arr, -value) + + return Image.fromarray(arr) + + +def offset(img: Image.Image, x: int = 0, y: int = 0) -> Image.Image: + """ + The offset function takes an image and offsets it by a given x(→) and y(↑) value. + + Parameters + ---------- + mask: Image.Image + Pass the mask image to the function + x: int + → + y: int + ↑ + + Returns + ------- + PIL.Image.Image + A new image that is offset by x and y + """ + return ImageChops.offset(img, x, -y) + + +def is_all_black(img: Image.Image | np.ndarray) -> bool: + if isinstance(img, Image.Image): + img = np.array(ensure_pil_image(img, "L")) + return cv2.countNonZero(img) == 0 + + +def has_intersection(im1: Any, im2: Any) -> bool: + arr1 = np.array(ensure_pil_image(im1, "L")) + arr2 = np.array(ensure_pil_image(im2, "L")) + return not is_all_black(cv2.bitwise_and(arr1, arr2)) + + +def bbox_area(bbox: list[T]) -> T: + return (bbox[2] - bbox[0]) * (bbox[3] - bbox[1]) + + +def mask_preprocess( + masks: list[Image.Image], + kernel: int = 0, + x_offset: int = 0, + y_offset: int = 0, + merge_invert: int | MergeInvert | str = MergeInvert.NONE, +) -> list[Image.Image]: + """ + The mask_preprocess function takes a list of masks and preprocesses them. + It dilates and erodes the masks, and offsets them by x_offset and y_offset. + + Parameters + ---------- + masks: list[Image.Image] + A list of masks + kernel: int + kernel size of dilation or erosion + x_offset: int + → + y_offset: int + ↑ + + Returns + ------- + list[Image.Image] + A list of processed masks + """ + if not masks: + return [] + + if x_offset != 0 or y_offset != 0: + masks = [offset(m, x_offset, y_offset) for m in masks] + + if kernel != 0: + masks = [dilate_erode(m, kernel) for m in masks] + masks = [m for m in masks if not is_all_black(m)] + + return mask_merge_invert(masks, mode=merge_invert) + + +# Bbox sorting +def _key_left_to_right(bbox: list[T]) -> T: + """ + Left to right + + Parameters + ---------- + bbox: list[int] | list[float] + list of [x1, y1, x2, y2] + """ + return bbox[0] + + +def _key_center_to_edge(bbox: list[T], *, center: tuple[float, float]) -> float: + """ + Center to edge + + Parameters + ---------- + bbox: list[int] | list[float] + list of [x1, y1, x2, y2] + image: Image.Image + the image + """ + bbox_center = ((bbox[0] + bbox[2]) / 2, (bbox[1] + bbox[3]) / 2) + return dist(center, bbox_center) + + +def _key_area(bbox: list[T]) -> T: + """ + Large to small + + Parameters + ---------- + bbox: list[int] | list[float] + list of [x1, y1, x2, y2] + """ + return -bbox_area(bbox) + + +def sort_bboxes( + pred: PredictOutput[T], order: int | SortBy = SortBy.NONE +) -> PredictOutput[T]: + if order == SortBy.NONE or len(pred.bboxes) <= 1: + return pred + + if order == SortBy.LEFT_TO_RIGHT: + key = _key_left_to_right + elif order == SortBy.CENTER_TO_EDGE: + width, height = pred.preview.size + center = (width / 2, height / 2) + key = partial(_key_center_to_edge, center=center) + elif order == SortBy.AREA: + key = _key_area + else: + raise RuntimeError + + items = len(pred.bboxes) + idx = sorted(range(items), key=lambda i: key(pred.bboxes[i])) + pred.bboxes = [pred.bboxes[i] for i in idx] + pred.masks = [pred.masks[i] for i in idx] + return pred + + +# Filter by ratio +def is_in_ratio(bbox: list[T], low: float, high: float, orig_area: int) -> bool: + area = bbox_area(bbox) + return low <= area / orig_area <= high + + +def filter_by_ratio( + pred: PredictOutput[T], low: float, high: float +) -> PredictOutput[T]: + if not pred.bboxes: + return pred + + w, h = pred.preview.size + orig_area = w * h + items = len(pred.bboxes) + idx = [i for i in range(items) if is_in_ratio(pred.bboxes[i], low, high, orig_area)] + pred.bboxes = [pred.bboxes[i] for i in idx] + pred.masks = [pred.masks[i] for i in idx] + return pred + + +def filter_k_largest(pred: PredictOutput[T], k: int = 0) -> PredictOutput[T]: + if not pred.bboxes or k == 0: + return pred + areas = [bbox_area(bbox) for bbox in pred.bboxes] + idx = np.argsort(areas)[-k:] + idx = idx[::-1] + pred.bboxes = [pred.bboxes[i] for i in idx] + pred.masks = [pred.masks[i] for i in idx] + return pred + + +# Merge / Invert +def mask_merge(masks: list[Image.Image]) -> list[Image.Image]: + arrs = [np.array(m) for m in masks] + arr = reduce(cv2.bitwise_or, arrs) + return [Image.fromarray(arr)] + + +def mask_invert(masks: list[Image.Image]) -> list[Image.Image]: + return [ImageChops.invert(m) for m in masks] + + +def mask_merge_invert( + masks: list[Image.Image], mode: int | MergeInvert | str +) -> list[Image.Image]: + if isinstance(mode, str): + mode = MASK_MERGE_INVERT.index(mode) + + if mode == MergeInvert.NONE or not masks: + return masks + + if mode == MergeInvert.MERGE: + return mask_merge(masks) + + if mode == MergeInvert.MERGE_INVERT: + merged = mask_merge(masks) + return mask_invert(merged) + + raise RuntimeError diff --git a/extensions/4-adetailer/adetailer/mediapipe.py b/extensions/4-adetailer/adetailer/mediapipe.py new file mode 100644 index 0000000000000000000000000000000000000000..b05fa0080d9d53367bf8ab0f8e0787953ef33b8b --- /dev/null +++ b/extensions/4-adetailer/adetailer/mediapipe.py @@ -0,0 +1,177 @@ +from __future__ import annotations + +from functools import partial + +import cv2 +import numpy as np +from PIL import Image, ImageDraw + +from adetailer import PredictOutput +from adetailer.common import create_bbox_from_mask, create_mask_from_bbox + + +def mediapipe_predict( + model_type: str, image: Image.Image, confidence: float = 0.3 +) -> PredictOutput: + mapping = { + "mediapipe_face_short": partial(mediapipe_face_detection, 0), + "mediapipe_face_full": partial(mediapipe_face_detection, 1), + "mediapipe_face_mesh": mediapipe_face_mesh, + "mediapipe_face_mesh_eyes_only": mediapipe_face_mesh_eyes_only, + } + if model_type in mapping: + func = mapping[model_type] + try: + return func(image, confidence) + except Exception: + return PredictOutput() + msg = f"[-] ADetailer: Invalid mediapipe model type: {model_type}, Available: {list(mapping.keys())!r}" + raise RuntimeError(msg) + + +def mediapipe_face_detection( + model_type: int, image: Image.Image, confidence: float = 0.3 +) -> PredictOutput[float]: + import mediapipe as mp + + img_width, img_height = image.size + + mp_face_detection = mp.solutions.face_detection + draw_util = mp.solutions.drawing_utils + + img_array = np.array(image) + + with mp_face_detection.FaceDetection( + model_selection=model_type, min_detection_confidence=confidence + ) as face_detector: + pred = face_detector.process(img_array) + + if pred.detections is None: + return PredictOutput() + + preview_array = img_array.copy() + + bboxes = [] + for detection in pred.detections: + draw_util.draw_detection(preview_array, detection) + + bbox = detection.location_data.relative_bounding_box + x1 = bbox.xmin * img_width + y1 = bbox.ymin * img_height + w = bbox.width * img_width + h = bbox.height * img_height + x2 = x1 + w + y2 = y1 + h + + bboxes.append([x1, y1, x2, y2]) + + masks = create_mask_from_bbox(bboxes, image.size) + preview = Image.fromarray(preview_array) + + return PredictOutput(bboxes=bboxes, masks=masks, preview=preview) + + +def mediapipe_face_mesh( + image: Image.Image, confidence: float = 0.3 +) -> PredictOutput[int]: + import mediapipe as mp + + mp_face_mesh = mp.solutions.face_mesh + draw_util = mp.solutions.drawing_utils + drawing_styles = mp.solutions.drawing_styles + + w, h = image.size + + with mp_face_mesh.FaceMesh( + static_image_mode=True, max_num_faces=20, min_detection_confidence=confidence + ) as face_mesh: + arr = np.array(image) + pred = face_mesh.process(arr) + + if pred.multi_face_landmarks is None: + return PredictOutput() + + preview = arr.copy() + masks = [] + + for landmarks in pred.multi_face_landmarks: + draw_util.draw_landmarks( + image=preview, + landmark_list=landmarks, + connections=mp_face_mesh.FACEMESH_TESSELATION, + landmark_drawing_spec=None, + connection_drawing_spec=drawing_styles.get_default_face_mesh_tesselation_style(), + ) + + points = np.array( + [[land.x * w, land.y * h] for land in landmarks.landmark], dtype=int + ) + outline = cv2.convexHull(points).reshape(-1).tolist() + + mask = Image.new("L", image.size, "black") + draw = ImageDraw.Draw(mask) + draw.polygon(outline, fill="white") + masks.append(mask) + + bboxes = create_bbox_from_mask(masks, image.size) + preview = Image.fromarray(preview) + return PredictOutput(bboxes=bboxes, masks=masks, preview=preview) + + +def mediapipe_face_mesh_eyes_only( + image: Image.Image, confidence: float = 0.3 +) -> PredictOutput[int]: + import mediapipe as mp + + mp_face_mesh = mp.solutions.face_mesh + + left_idx = np.array(list(mp_face_mesh.FACEMESH_LEFT_EYE)).flatten() + right_idx = np.array(list(mp_face_mesh.FACEMESH_RIGHT_EYE)).flatten() + + w, h = image.size + + with mp_face_mesh.FaceMesh( + static_image_mode=True, max_num_faces=20, min_detection_confidence=confidence + ) as face_mesh: + arr = np.array(image) + pred = face_mesh.process(arr) + + if pred.multi_face_landmarks is None: + return PredictOutput() + + preview = image.copy() + masks = [] + + for landmarks in pred.multi_face_landmarks: + points = np.array( + [[land.x * w, land.y * h] for land in landmarks.landmark], dtype=int + ) + left_eyes = points[left_idx] + right_eyes = points[right_idx] + left_outline = cv2.convexHull(left_eyes).reshape(-1).tolist() + right_outline = cv2.convexHull(right_eyes).reshape(-1).tolist() + + mask = Image.new("L", image.size, "black") + draw = ImageDraw.Draw(mask) + for outline in (left_outline, right_outline): + draw.polygon(outline, fill="white") + masks.append(mask) + + bboxes = create_bbox_from_mask(masks, image.size) + preview = draw_preview(preview, bboxes, masks) + return PredictOutput(bboxes=bboxes, masks=masks, preview=preview) + + +def draw_preview( + preview: Image.Image, bboxes: list[list[int]], masks: list[Image.Image] +) -> Image.Image: + red = Image.new("RGB", preview.size, "red") + for mask in masks: + masked = Image.composite(red, preview, mask) + preview = Image.blend(preview, masked, 0.25) + + draw = ImageDraw.Draw(preview) + for bbox in bboxes: + draw.rectangle(bbox, outline="red", width=2) + + return preview diff --git a/extensions/4-adetailer/adetailer/ultralytics.py b/extensions/4-adetailer/adetailer/ultralytics.py new file mode 100644 index 0000000000000000000000000000000000000000..dc93482447b90ac1b0e8027c02cacc357c6cb52d --- /dev/null +++ b/extensions/4-adetailer/adetailer/ultralytics.py @@ -0,0 +1,66 @@ +from __future__ import annotations + +from pathlib import Path +from typing import TYPE_CHECKING + +import cv2 +from PIL import Image +from torchvision.transforms.functional import to_pil_image + +from adetailer import PredictOutput +from adetailer.common import create_mask_from_bbox + +if TYPE_CHECKING: + import torch + from ultralytics import YOLO, YOLOWorld + + +def ultralytics_predict( + model_path: str | Path, + image: Image.Image, + confidence: float = 0.3, + device: str = "", + classes: str = "", +) -> PredictOutput[float]: + from ultralytics import YOLO + + model = YOLO(model_path) + apply_classes(model, model_path, classes) + pred = model(image, conf=confidence, device=device) + + bboxes = pred[0].boxes.xyxy.cpu().numpy() + if bboxes.size == 0: + return PredictOutput() + bboxes = bboxes.tolist() + + if pred[0].masks is None: + masks = create_mask_from_bbox(bboxes, image.size) + else: + masks = mask_to_pil(pred[0].masks.data, image.size) + preview = pred[0].plot() + preview = cv2.cvtColor(preview, cv2.COLOR_BGR2RGB) + preview = Image.fromarray(preview) + + return PredictOutput(bboxes=bboxes, masks=masks, preview=preview) + + +def apply_classes(model: YOLO | YOLOWorld, model_path: str | Path, classes: str): + if not classes or "-world" not in Path(model_path).stem: + return + parsed = [c.strip() for c in classes.split(",") if c.strip()] + if parsed: + model.set_classes(parsed) + + +def mask_to_pil(masks: torch.Tensor, shape: tuple[int, int]) -> list[Image.Image]: + """ + Parameters + ---------- + masks: torch.Tensor, dtype=torch.float32, shape=(N, H, W). + The device can be CUDA, but `to_pil_image` takes care of that. + + shape: tuple[int, int] + (W, H) of the original image + """ + n = masks.shape[0] + return [to_pil_image(masks[i], mode="L").resize(shape) for i in range(n)] diff --git a/extensions/4-adetailer/controlnet_ext/__init__.py b/extensions/4-adetailer/controlnet_ext/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..6da28d4e1dd2bd6858a55da111c6aa96de69496a --- /dev/null +++ b/extensions/4-adetailer/controlnet_ext/__init__.py @@ -0,0 +1,25 @@ +try: + from .controlnet_ext_forge import ( + ControlNetExt, + controlnet_exists, + controlnet_type, + get_cn_models, + ) +except ImportError: + from .controlnet_ext import ( + ControlNetExt, + controlnet_exists, + controlnet_type, + get_cn_models, + ) + +from .restore import CNHijackRestore, cn_allow_script_control + +__all__ = [ + "ControlNetExt", + "CNHijackRestore", + "cn_allow_script_control", + "controlnet_exists", + "controlnet_type", + "get_cn_models", +] diff --git a/extensions/4-adetailer/controlnet_ext/__pycache__/__init__.cpython-310.pyc b/extensions/4-adetailer/controlnet_ext/__pycache__/__init__.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..324aa608d8cb29e568d505af2a653b068b8265ff Binary files /dev/null and b/extensions/4-adetailer/controlnet_ext/__pycache__/__init__.cpython-310.pyc differ diff --git a/extensions/4-adetailer/controlnet_ext/__pycache__/common.cpython-310.pyc b/extensions/4-adetailer/controlnet_ext/__pycache__/common.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..314e18a15791bb7c283268f1107241f5b8c37076 Binary files /dev/null and b/extensions/4-adetailer/controlnet_ext/__pycache__/common.cpython-310.pyc differ diff --git a/extensions/4-adetailer/controlnet_ext/__pycache__/controlnet_ext.cpython-310.pyc b/extensions/4-adetailer/controlnet_ext/__pycache__/controlnet_ext.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..201e2857dbd5fb879097cfdbccfd211763df6ab1 Binary files /dev/null and b/extensions/4-adetailer/controlnet_ext/__pycache__/controlnet_ext.cpython-310.pyc differ diff --git a/extensions/4-adetailer/controlnet_ext/__pycache__/controlnet_ext_forge.cpython-310.pyc b/extensions/4-adetailer/controlnet_ext/__pycache__/controlnet_ext_forge.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..6020325471bbd0b87cb45fb0742e2b073f69de22 Binary files /dev/null and b/extensions/4-adetailer/controlnet_ext/__pycache__/controlnet_ext_forge.cpython-310.pyc differ diff --git a/extensions/4-adetailer/controlnet_ext/__pycache__/restore.cpython-310.pyc b/extensions/4-adetailer/controlnet_ext/__pycache__/restore.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..4c801397c7cdb49e80c8f71ed7a84d578b6b7cf1 Binary files /dev/null and b/extensions/4-adetailer/controlnet_ext/__pycache__/restore.cpython-310.pyc differ diff --git a/extensions/4-adetailer/controlnet_ext/common.py b/extensions/4-adetailer/controlnet_ext/common.py new file mode 100644 index 0000000000000000000000000000000000000000..f485da54d79c4252801dc788b32b16f706b66b23 --- /dev/null +++ b/extensions/4-adetailer/controlnet_ext/common.py @@ -0,0 +1,12 @@ +import re + +cn_model_module = { + "inpaint": "inpaint_global_harmonious", + "scribble": "t2ia_sketch_pidi", + "lineart": "lineart_coarse", + "openpose": "openpose_full", + "tile": "tile_resample", + "depth": "depth_midas", +} +_names = [*cn_model_module, "union"] +cn_model_regex = re.compile("|".join(_names), flags=re.IGNORECASE) diff --git a/extensions/4-adetailer/controlnet_ext/controlnet_ext.py b/extensions/4-adetailer/controlnet_ext/controlnet_ext.py new file mode 100644 index 0000000000000000000000000000000000000000..bcf7130c479ab009f2c5a4de8c81bec2ae9c55e6 --- /dev/null +++ b/extensions/4-adetailer/controlnet_ext/controlnet_ext.py @@ -0,0 +1,149 @@ +from __future__ import annotations + +import importlib +import sys +from functools import lru_cache +from pathlib import Path + +from modules import extensions, sd_models, shared +from modules.paths import extensions_builtin_dir, extensions_dir, models_path + +from .common import cn_model_module, cn_model_regex + +ext_path = Path(extensions_dir) +ext_builtin_path = Path(extensions_builtin_dir) +controlnet_exists = False +controlnet_type = "standard" +controlnet_path = None +cn_base_path = "" + +for extension in extensions.active(): + if not extension.enabled: + continue + # For cases like sd-webui-controlnet-master + if "sd-webui-controlnet" in extension.name: + controlnet_exists = True + controlnet_path = Path(extension.path) + cn_base_path = ".".join(controlnet_path.parts[-2:]) + break + +if controlnet_path is not None: + sd_webui_controlnet_path = controlnet_path.resolve().parent + if sd_webui_controlnet_path.stem in ("extensions", "extensions-builtin"): + target_path = str(sd_webui_controlnet_path.parent) + if target_path not in sys.path: + sys.path.append(target_path) + + +class ControlNetExt: + def __init__(self): + self.cn_models = ["None"] + self.cn_available = False + self.external_cn = None + + def init_controlnet(self): + import_path = cn_base_path + ".scripts.external_code" + + self.external_cn = importlib.import_module(import_path, "external_code") + self.cn_available = True + models = self.external_cn.get_models() + self.cn_models.extend(m for m in models if cn_model_regex.search(m)) + + def update_scripts_args( + self, + p, + model: str, + module: str | None, + weight: float, + guidance_start: float, + guidance_end: float, + ): + if (not self.cn_available) or model == "None": + return + + if module == "None": + module = None + if module is None: + for m, v in cn_model_module.items(): + if m in model: + module = v + break + + cn_units = [ + self.external_cn.ControlNetUnit( + model=model, + weight=weight, + control_mode=self.external_cn.ControlMode.BALANCED, + module=module, + guidance_start=guidance_start, + guidance_end=guidance_end, + pixel_perfect=True, + ) + ] + + try: + self.external_cn.update_cn_script_in_processing(p, cn_units) + except AttributeError as e: + if "script_args_value" not in str(e): + raise + msg = "[-] Adetailer: ControlNet option not available in WEBUI version lower than 1.6.0 due to updates in ControlNet" + raise RuntimeError(msg) from e + + +def get_cn_model_dirs() -> list[Path]: + cn_model_dir = Path(models_path, "ControlNet") + if controlnet_path is not None: + cn_model_dir_old = controlnet_path.joinpath("models") + else: + cn_model_dir_old = None + ext_dir1 = shared.opts.data.get("control_net_models_path", "") + ext_dir2 = getattr(shared.cmd_opts, "controlnet_dir", "") + + dirs = [cn_model_dir] + dirs += [ + Path(ext_dir) for ext_dir in [cn_model_dir_old, ext_dir1, ext_dir2] if ext_dir + ] + + return dirs + + +@lru_cache +def _get_cn_models() -> list[str]: + """ + Since we can't import ControlNet, we use a function that does something like + controlnet's `list(global_state.cn_models_names.values())`. + """ + cn_model_exts = (".pt", ".pth", ".ckpt", ".safetensors") + dirs = get_cn_model_dirs() + name_filter = shared.opts.data.get("control_net_models_name_filter", "") + name_filter = name_filter.strip(" ").lower() + + model_paths = [] + + for base in dirs: + if not base.exists(): + continue + + for p in base.rglob("*"): + if ( + p.is_file() + and p.suffix in cn_model_exts + and cn_model_regex.search(p.name) + ): + if name_filter and name_filter not in p.name.lower(): + continue + model_paths.append(p) + model_paths.sort(key=lambda p: p.name) + + models = [] + for p in model_paths: + model_hash = sd_models.model_hash(p) + name = f"{p.stem} [{model_hash}]" + models.append(name) + return models + + +def get_cn_models() -> list[str]: + if controlnet_exists: + return _get_cn_models() + return [] diff --git a/extensions/4-adetailer/controlnet_ext/controlnet_ext_forge.py b/extensions/4-adetailer/controlnet_ext/controlnet_ext_forge.py new file mode 100644 index 0000000000000000000000000000000000000000..ef59e32e5d0e4a2b7b7ae32919275b9e60465cf4 --- /dev/null +++ b/extensions/4-adetailer/controlnet_ext/controlnet_ext_forge.py @@ -0,0 +1,92 @@ +from __future__ import annotations + +import copy + +import numpy as np +from lib_controlnet import external_code, global_state +from lib_controlnet.external_code import ControlNetUnit + +from modules import scripts +from modules.processing import StableDiffusionProcessing + +from .common import cn_model_regex + +controlnet_exists = True +controlnet_type = "forge" + + +def find_script(p: StableDiffusionProcessing, script_title: str) -> scripts.Script: + script = next((s for s in p.scripts.scripts if s.title() == script_title), None) + if not script: + msg = f"Script not found: {script_title!r}" + raise RuntimeError(msg) + return script + + +def add_forge_script_to_adetailer_run( + p: StableDiffusionProcessing, script_title: str, script_args: list +): + p.scripts = copy.copy(scripts.scripts_img2img) + p.scripts.alwayson_scripts = [] + p.script_args_value = [] + + script = copy.copy(find_script(p, script_title)) + script.args_from = len(p.script_args_value) + script.args_to = len(p.script_args_value) + len(script_args) + p.scripts.alwayson_scripts.append(script) + p.script_args_value.extend(script_args) + + +class ControlNetExt: + def __init__(self): + self.cn_available = False + self.external_cn = external_code + + def init_controlnet(self): + self.cn_available = True + + def update_scripts_args( + self, + p, + model: str, + module: str | None, + weight: float, + guidance_start: float, + guidance_end: float, + ): + if (not self.cn_available) or model == "None": + return + + image = np.asarray(p.init_images[0]) + mask = np.full_like(image, fill_value=255) + + cnet_image = {"image": image, "mask": mask} + + pres = external_code.pixel_perfect_resolution( + image, + target_H=p.height, + target_W=p.width, + resize_mode=external_code.resize_mode_from_value(p.resize_mode), + ) + + add_forge_script_to_adetailer_run( + p, + "ControlNet", + [ + ControlNetUnit( + enabled=True, + image=cnet_image, + model=model, + module=module, + weight=weight, + guidance_start=guidance_start, + guidance_end=guidance_end, + processor_res=pres, + ) + ], + ) + + +def get_cn_models() -> list[str]: + models = global_state.get_all_controlnet_names() + return [m for m in models if cn_model_regex.search(m)] diff --git a/extensions/4-adetailer/controlnet_ext/restore.py b/extensions/4-adetailer/controlnet_ext/restore.py new file mode 100644 index 0000000000000000000000000000000000000000..152ffd0a9732b5512e4440b795a1ad89bcb27cab --- /dev/null +++ b/extensions/4-adetailer/controlnet_ext/restore.py @@ -0,0 +1,43 @@ +from __future__ import annotations + +from contextlib import contextmanager + +from modules import img2img, processing, shared + + +class CNHijackRestore: + def __init__(self): + self.process = hasattr(processing, "__controlnet_original_process_images_inner") + self.img2img = hasattr(img2img, "__controlnet_original_process_batch") + + def __enter__(self): + if self.process: + self.orig_process = processing.process_images_inner + processing.process_images_inner = getattr( + processing, "__controlnet_original_process_images_inner" + ) + if self.img2img: + self.orig_img2img = img2img.process_batch + img2img.process_batch = getattr( + img2img, "__controlnet_original_process_batch" + ) + + def __exit__(self, *args, **kwargs): + if self.process: + processing.process_images_inner = self.orig_process + if self.img2img: + img2img.process_batch = self.orig_img2img + + +@contextmanager +def cn_allow_script_control(): + orig = False + if "control_net_allow_script_control" in shared.opts.data: + try: + orig = shared.opts.data["control_net_allow_script_control"] + shared.opts.data["control_net_allow_script_control"] = True + yield + finally: + shared.opts.data["control_net_allow_script_control"] = orig + else: + yield diff --git a/extensions/4-adetailer/install.py b/extensions/4-adetailer/install.py new file mode 100644 index 0000000000000000000000000000000000000000..6afd916654d39b4500b6eb0a7543b00510f55916 --- /dev/null +++ b/extensions/4-adetailer/install.py @@ -0,0 +1,77 @@ +from __future__ import annotations + +import importlib.util +import subprocess +import sys +from importlib.metadata import version # python >= 3.8 + +from packaging.version import parse + +import_name = {"py-cpuinfo": "cpuinfo", "protobuf": "google.protobuf"} + + +def is_installed( + package: str, min_version: str | None = None, max_version: str | None = None +): + name = import_name.get(package, package) + try: + spec = importlib.util.find_spec(name) + except ModuleNotFoundError: + return False + + if spec is None: + return False + + if not min_version and not max_version: + return True + + if not min_version: + min_version = "0.0.0" + if not max_version: + max_version = "99999999.99999999.99999999" + + try: + pkg_version = version(package) + return parse(min_version) <= parse(pkg_version) <= parse(max_version) + except Exception: + return False + + +def run_pip(*args): + subprocess.run([sys.executable, "-m", "pip", "install", *args], check=True) + + +def install(): + deps = [ + # requirements + ("ultralytics", "8.2.0", None), + ("mediapipe", "0.10.13", None), + ("rich", "13.0.0", None), + ] + + pkgs = [] + for pkg, low, high in deps: + if not is_installed(pkg, low, high): + if low and high: + cmd = f"{pkg}>={low},<={high}" + elif low: + cmd = f"{pkg}>={low}" + elif high: + cmd = f"{pkg}<={high}" + else: + cmd = pkg + pkgs.append(cmd) + + if pkgs: + run_pip(*pkgs) + + +try: + import launch + + skip_install = launch.args.skip_install +except Exception: + skip_install = False + +if not skip_install: + install() diff --git a/extensions/4-adetailer/preload.py b/extensions/4-adetailer/preload.py new file mode 100644 index 0000000000000000000000000000000000000000..10be161f22b0a5ef7083609829a21b547eae9aea --- /dev/null +++ b/extensions/4-adetailer/preload.py @@ -0,0 +1,9 @@ +import argparse + + +def preload(parser: argparse.ArgumentParser): + parser.add_argument( + "--ad-no-huggingface", + action="store_true", + help="Don't use adetailer models from huggingface", + ) diff --git a/extensions/4-adetailer/pyproject.toml b/extensions/4-adetailer/pyproject.toml new file mode 100644 index 0000000000000000000000000000000000000000..87f609f943c688d857a761f24dd103b37b5f78ac --- /dev/null +++ b/extensions/4-adetailer/pyproject.toml @@ -0,0 +1,77 @@ +[project] +name = "adetailer" +description = "An object detection and auto-mask extension for stable diffusion webui." +authors = [{ name = "dowon", email = "ks2515@naver.com" }] +requires-python = ">=3.9" +readme = "README.md" +license = { text = "AGPL-3.0" } +dependencies = [ + "ultralytics>=8.2", + "mediapipe>=0.10.13", + "pydantic<3", + "rich>=13", + "huggingface_hub", +] +keywords = [ + "stable-diffusion", + "stable-diffusion-webui", + "adetailer", + "ultralytics", +] +classifiers = [ + "License :: OSI Approved :: GNU Affero General Public License v3", + "Topic :: Scientific/Engineering :: Image Recognition", +] +dynamic = ["version"] + +[project.urls] +repository = "https://github.com/Bing-su/adetailer" + +[build-system] +requires = ["hatchling"] +build-backend = "hatchling.build" + +[tool.hatch.version] +path = "adetailer/__version__.py" + +[tool.isort] +profile = "black" +known_first_party = ["launch", "modules"] + +[tool.ruff] +target-version = "py39" + +[tool.ruff.lint] +select = [ + "A", + "B", + "C4", + "C90", + "E", + "EM", + "F", + "FA", + "I001", + "ISC", + "N", + "PD", + "PERF", + "PIE", + "PT", + "PTH", + "RET", + "RUF", + "SIM", + "T20", + "TRY", + "UP", + "W", +] +ignore = ["B905", "E501"] +unfixable = ["F401"] + +[tool.ruff.lint.isort] +known-first-party = ["launch", "modules"] + +[tool.ruff.lint.pyupgrade] +keep-runtime-typing = true diff --git a/extensions/4-adetailer/scripts/!adetailer.py b/extensions/4-adetailer/scripts/!adetailer.py new file mode 100644 index 0000000000000000000000000000000000000000..b655e6e57741ba6ef03779135793004fee6503c1 --- /dev/null +++ b/extensions/4-adetailer/scripts/!adetailer.py @@ -0,0 +1,1055 @@ +from __future__ import annotations + +import platform +import re +import sys +import traceback +from copy import copy +from functools import partial +from pathlib import Path +from textwrap import dedent +from typing import TYPE_CHECKING, Any, NamedTuple, cast + +import gradio as gr +from PIL import Image, ImageChops +from rich import print + +import modules +from aaaaaa.conditional import create_binary_mask, schedulers +from aaaaaa.helper import ( + change_torch_load, + copy_extra_params, + pause_total_tqdm, + preserve_prompts, +) +from aaaaaa.p_method import ( + get_i, + is_img2img_inpaint, + is_inpaint_only_masked, + is_skip_img2img, + need_call_postprocess, + need_call_process, +) +from aaaaaa.traceback import rich_traceback +from aaaaaa.ui import WebuiInfo, adui, ordinal, suffix +from adetailer import ( + ADETAILER, + __version__, + get_models, + mediapipe_predict, + ultralytics_predict, +) +from adetailer.args import ( + BBOX_SORTBY, + BUILTIN_SCRIPT, + SCRIPT_DEFAULT, + ADetailerArgs, + SkipImg2ImgOrig, +) +from adetailer.common import PredictOutput, ensure_pil_image, safe_mkdir +from adetailer.mask import ( + filter_by_ratio, + filter_k_largest, + has_intersection, + is_all_black, + mask_preprocess, + sort_bboxes, +) +from controlnet_ext import ( + CNHijackRestore, + ControlNetExt, + cn_allow_script_control, + controlnet_exists, + controlnet_type, + get_cn_models, +) +from modules import images, paths, script_callbacks, scripts, shared +from modules.devices import NansException +from modules.processing import ( + Processed, + StableDiffusionProcessingImg2Img, + create_infotext, + process_images, +) +from modules.sd_samplers import all_samplers +from modules.shared import cmd_opts, opts, state + +if TYPE_CHECKING: + from fastapi import FastAPI + +PARAMS_TXT = "params.txt" + +no_huggingface = getattr(cmd_opts, "ad_no_huggingface", False) +adetailer_dir = Path(paths.models_path, "adetailer") +safe_mkdir(adetailer_dir) + +extra_models_dirs = shared.opts.data.get("ad_extra_models_dir", "") +model_mapping = get_models( + adetailer_dir, + *extra_models_dirs.split("|"), + huggingface=not no_huggingface, +) + +txt2img_submit_button = img2img_submit_button = None +txt2img_submit_button = cast(gr.Button, txt2img_submit_button) +img2img_submit_button = cast(gr.Button, img2img_submit_button) + +print( + f"[-] ADetailer initialized. version: {__version__}, num models: {len(model_mapping)}" +) + + +class AfterDetailerScript(scripts.Script): + def __init__(self): + super().__init__() + self.ultralytics_device = self.get_ultralytics_device() + + self.controlnet_ext = None + + def __repr__(self): + return f"{self.__class__.__name__}(version={__version__})" + + def title(self): + return ADETAILER + + def show(self, is_img2img): + return scripts.AlwaysVisible + + def ui(self, is_img2img): + num_models = opts.data.get("ad_max_models", 2) + ad_model_list = list(model_mapping.keys()) + sampler_names = [sampler.name for sampler in all_samplers] + scheduler_names = [x.label for x in schedulers] + + checkpoint_list = modules.sd_models.checkpoint_tiles(use_short=True) + vae_list = modules.shared_items.sd_vae_items() + + webui_info = WebuiInfo( + ad_model_list=ad_model_list, + sampler_names=sampler_names, + scheduler_names=scheduler_names, + t2i_button=txt2img_submit_button, + i2i_button=img2img_submit_button, + checkpoints_list=checkpoint_list, + vae_list=vae_list, + ) + + components, infotext_fields = adui(num_models, is_img2img, webui_info) + + self.infotext_fields = infotext_fields + return components + + def init_controlnet_ext(self) -> None: + if self.controlnet_ext is not None: + return + self.controlnet_ext = ControlNetExt() + + if controlnet_exists: + try: + self.controlnet_ext.init_controlnet() + except ImportError: + error = traceback.format_exc() + print( + f"[-] ADetailer: ControlNetExt init failed:\n{error}", + file=sys.stderr, + ) + + def update_controlnet_args(self, p, args: ADetailerArgs) -> None: + if self.controlnet_ext is None: + self.init_controlnet_ext() + + if ( + self.controlnet_ext is not None + and self.controlnet_ext.cn_available + and args.ad_controlnet_model != "None" + ): + self.controlnet_ext.update_scripts_args( + p, + model=args.ad_controlnet_model, + module=args.ad_controlnet_module, + weight=args.ad_controlnet_weight, + guidance_start=args.ad_controlnet_guidance_start, + guidance_end=args.ad_controlnet_guidance_end, + ) + + def is_ad_enabled(self, *args_) -> bool: + arg_list = [arg for arg in args_ if isinstance(arg, dict)] + if not args_ or not arg_list: + message = f""" + [-] ADetailer: Invalid arguments passed to ADetailer. + input: {args_!r} + ADetailer disabled. + """ + print(dedent(message), file=sys.stderr) + return False + + ad_enabled = args_[0] if isinstance(args_[0], bool) else True + pydantic_args = [] + for arg in arg_list: + try: + pydantic_args.append(ADetailerArgs(**arg)) + except ValueError: # noqa: PERF203 + continue + not_none = not all(arg.need_skip() for arg in pydantic_args) + return ad_enabled and not_none + + def set_skip_img2img(self, p, *args_) -> None: + if ( + hasattr(p, "_ad_skip_img2img") + or not hasattr(p, "init_images") + or not p.init_images + ): + return + + if len(args_) >= 2 and isinstance(args_[1], bool): + p._ad_skip_img2img = args_[1] + else: + p._ad_skip_img2img = False + + if not p._ad_skip_img2img: + return + + if is_img2img_inpaint(p): + p._ad_disabled = True + msg = "[-] ADetailer: img2img inpainting with skip img2img is not supported. (because it's buggy)" + print(msg) + return + + p._ad_orig = SkipImg2ImgOrig( + steps=p.steps, + sampler_name=p.sampler_name, + width=p.width, + height=p.height, + ) + p.steps = 1 + p.sampler_name = "Euler" + p.width = 128 + p.height = 128 + + def get_args(self, p, *args_) -> list[ADetailerArgs]: + """ + `args_` is at least 1 in length by `is_ad_enabled` immediately above + """ + args = [arg for arg in args_ if isinstance(arg, dict)] + + if not args: + message = f"[-] ADetailer: Invalid arguments passed to ADetailer: {args_!r}" + raise ValueError(message) + + if hasattr(p, "_ad_xyz"): + args[0] = {**args[0], **p._ad_xyz} + + all_inputs = [] + + for n, arg_dict in enumerate(args, 1): + try: + inp = ADetailerArgs(**arg_dict) + except ValueError as e: + msg = f"[-] ADetailer: ValidationError when validating {ordinal(n)} arguments" + if hasattr(e, "add_note"): + e.add_note(msg) + else: + print(msg, file=sys.stderr) + raise + + all_inputs.append(inp) + + return all_inputs + + def extra_params(self, arg_list: list[ADetailerArgs]) -> dict: + params = {} + for n, args in enumerate(arg_list): + params.update(args.extra_params(suffix=suffix(n))) + params["ADetailer version"] = __version__ + return params + + @staticmethod + def get_ultralytics_device() -> str: + if "adetailer" in shared.cmd_opts.use_cpu: + return "cpu" + + if platform.system() == "Darwin": + return "" + + vram_args = ["lowvram", "medvram", "medvram_sdxl"] + if any(getattr(cmd_opts, vram, False) for vram in vram_args): + return "cpu" + + return "" + + def prompt_blank_replacement( + self, all_prompts: list[str], i: int, default: str + ) -> str: + if not all_prompts: + return default + if i < len(all_prompts): + return all_prompts[i] + j = i % len(all_prompts) + return all_prompts[j] + + def _get_prompt( + self, + ad_prompt: str, + all_prompts: list[str], + i: int, + default: str, + replacements: list[PromptSR], + ) -> list[str]: + prompts = re.split(r"\s*\[SEP\]\s*", ad_prompt) + blank_replacement = self.prompt_blank_replacement(all_prompts, i, default) + for n in range(len(prompts)): + if not prompts[n]: + prompts[n] = blank_replacement + elif "[PROMPT]" in prompts[n]: + prompts[n] = prompts[n].replace("[PROMPT]", blank_replacement) + + for pair in replacements: + prompts[n] = prompts[n].replace(pair.s, pair.r) + return prompts + + def get_prompt(self, p, args: ADetailerArgs) -> tuple[list[str], list[str]]: + i = get_i(p) + prompt_sr = p._ad_xyz_prompt_sr if hasattr(p, "_ad_xyz_prompt_sr") else [] + + prompt = self._get_prompt( + ad_prompt=args.ad_prompt, + all_prompts=p.all_prompts, + i=i, + default=p.prompt, + replacements=prompt_sr, + ) + negative_prompt = self._get_prompt( + ad_prompt=args.ad_negative_prompt, + all_prompts=p.all_negative_prompts, + i=i, + default=p.negative_prompt, + replacements=prompt_sr, + ) + + return prompt, negative_prompt + + def get_seed(self, p) -> tuple[int, int]: + i = get_i(p) + + if not p.all_seeds: + seed = p.seed + elif i < len(p.all_seeds): + seed = p.all_seeds[i] + else: + j = i % len(p.all_seeds) + seed = p.all_seeds[j] + + if not p.all_subseeds: + subseed = p.subseed + elif i < len(p.all_subseeds): + subseed = p.all_subseeds[i] + else: + j = i % len(p.all_subseeds) + subseed = p.all_subseeds[j] + + return seed, subseed + + def get_width_height(self, p, args: ADetailerArgs) -> tuple[int, int]: + if args.ad_use_inpaint_width_height: + width = args.ad_inpaint_width + height = args.ad_inpaint_height + elif hasattr(p, "_ad_orig"): + width = p._ad_orig.width + height = p._ad_orig.height + else: + width = p.width + height = p.height + + return width, height + + def get_steps(self, p, args: ADetailerArgs) -> int: + if args.ad_use_steps: + return args.ad_steps + if hasattr(p, "_ad_orig"): + return p._ad_orig.steps + return p.steps + + def get_cfg_scale(self, p, args: ADetailerArgs) -> float: + return args.ad_cfg_scale if args.ad_use_cfg_scale else p.cfg_scale + + def get_sampler(self, p, args: ADetailerArgs) -> str: + if args.ad_use_sampler: + if args.ad_sampler == "Use same sampler": + return p.sampler_name + return args.ad_sampler + + if hasattr(p, "_ad_orig"): + return p._ad_orig.sampler_name + return p.sampler_name + + def get_scheduler(self, p, args: ADetailerArgs) -> dict[str, str]: + "webui >= 1.9.0" + if not args.ad_use_sampler: + return {"scheduler": getattr(p, "scheduler", "Automatic")} + + if args.ad_scheduler == "Use same scheduler": + value = getattr(p, "scheduler", "Automatic") + else: + value = args.ad_scheduler + return {"scheduler": value} + + def get_override_settings(self, p, args: ADetailerArgs) -> dict[str, Any]: + d = {} + + if args.ad_use_clip_skip: + d["CLIP_stop_at_last_layers"] = args.ad_clip_skip + + if ( + args.ad_use_checkpoint + and args.ad_checkpoint + and args.ad_checkpoint not in ("None", "Use same checkpoint") + ): + d["sd_model_checkpoint"] = args.ad_checkpoint + + if ( + args.ad_use_vae + and args.ad_vae + and args.ad_vae not in ("None", "Use same VAE") + ): + d["sd_vae"] = args.ad_vae + return d + + def get_initial_noise_multiplier(self, p, args: ADetailerArgs) -> float | None: + return args.ad_noise_multiplier if args.ad_use_noise_multiplier else None + + @staticmethod + def infotext(p) -> str: + return create_infotext( + p, p.all_prompts, p.all_seeds, p.all_subseeds, None, 0, 0 + ) + + def read_params_txt(self) -> str: + params_txt = Path(paths.data_path, PARAMS_TXT) + if params_txt.exists(): + return params_txt.read_text(encoding="utf-8") + return "" + + def write_params_txt(self, content: str) -> None: + params_txt = Path(paths.data_path, PARAMS_TXT) + if params_txt.exists() and content: + params_txt.write_text(content, encoding="utf-8") + + @staticmethod + def script_args_copy(script_args): + type_: type[list] | type[tuple] = type(script_args) + result = [] + for arg in script_args: + try: + a = copy(arg) + except TypeError: + a = arg + result.append(a) + return type_(result) + + def script_filter(self, p, args: ADetailerArgs): + script_runner = copy(p.scripts) + script_args = self.script_args_copy(p.script_args) + + ad_only_selected_scripts = opts.data.get("ad_only_selected_scripts", True) + if not ad_only_selected_scripts: + return script_runner, script_args + + ad_script_names_string: str = opts.data.get("ad_script_names", SCRIPT_DEFAULT) + ad_script_names = ad_script_names_string.split(",") + BUILTIN_SCRIPT.split(",") + script_names_set = { + name + for script_name in ad_script_names + for name in (script_name, script_name.strip()) + } + + if args.ad_controlnet_model != "None": + script_names_set.add("controlnet") + + filtered_alwayson = [] + for script_object in script_runner.alwayson_scripts: + filepath = script_object.filename + filename = Path(filepath).stem + if filename in script_names_set: + filtered_alwayson.append(script_object) + + script_runner.alwayson_scripts = filtered_alwayson + return script_runner, script_args + + def disable_controlnet_units( + self, script_args: list[Any] | tuple[Any, ...] + ) -> None: + for obj in script_args: + if "controlnet" in obj.__class__.__name__.lower(): + if hasattr(obj, "enabled"): + obj.enabled = False + if hasattr(obj, "input_mode"): + obj.input_mode = getattr(obj.input_mode, "SIMPLE", "simple") + + elif isinstance(obj, dict) and "module" in obj: + obj["enabled"] = False + + def get_i2i_p(self, p, args: ADetailerArgs, image): + seed, subseed = self.get_seed(p) + width, height = self.get_width_height(p, args) + steps = self.get_steps(p, args) + cfg_scale = self.get_cfg_scale(p, args) + initial_noise_multiplier = self.get_initial_noise_multiplier(p, args) + sampler_name = self.get_sampler(p, args) + override_settings = self.get_override_settings(p, args) + + version_args = {} + if schedulers: + version_args.update(self.get_scheduler(p, args)) + + i2i = StableDiffusionProcessingImg2Img( + init_images=[image], + resize_mode=0, + denoising_strength=args.ad_denoising_strength, + mask=None, + mask_blur=args.ad_mask_blur, + inpainting_fill=1, + inpaint_full_res=args.ad_inpaint_only_masked, + inpaint_full_res_padding=args.ad_inpaint_only_masked_padding, + inpainting_mask_invert=0, + initial_noise_multiplier=initial_noise_multiplier, + sd_model=p.sd_model, + outpath_samples=p.outpath_samples, + outpath_grids=p.outpath_grids, + prompt="", # replace later + negative_prompt="", + styles=p.styles, + seed=seed, + subseed=subseed, + subseed_strength=p.subseed_strength, + seed_resize_from_h=p.seed_resize_from_h, + seed_resize_from_w=p.seed_resize_from_w, + sampler_name=sampler_name, + batch_size=1, + n_iter=1, + steps=steps, + cfg_scale=cfg_scale, + width=width, + height=height, + restore_faces=args.ad_restore_face, + tiling=p.tiling, + extra_generation_params=copy_extra_params(p.extra_generation_params), + do_not_save_samples=True, + do_not_save_grid=True, + override_settings=override_settings, + **version_args, + ) + + i2i.cached_c = [None, None] + i2i.cached_uc = [None, None] + i2i.scripts, i2i.script_args = self.script_filter(p, args) + i2i._ad_disabled = True + i2i._ad_inner = True + + if args.ad_controlnet_model != "Passthrough" and controlnet_type != "forge": + self.disable_controlnet_units(i2i.script_args) + + if args.ad_controlnet_model not in ["None", "Passthrough"]: + self.update_controlnet_args(i2i, args) + elif args.ad_controlnet_model == "None": + i2i.control_net_enabled = False + + return i2i + + def save_image(self, p, image, *, condition: str, suffix: str) -> None: + i = get_i(p) + if p.all_prompts: + i %= len(p.all_prompts) + save_prompt = p.all_prompts[i] + else: + save_prompt = p.prompt + seed, _ = self.get_seed(p) + + if opts.data.get(condition, False): + images.save_image( + image=image, + path=p.outpath_samples, + basename="", + seed=seed, + prompt=save_prompt, + extension=opts.samples_format, + info=self.infotext(p), + p=p, + suffix=suffix, + ) + + def get_ad_model(self, name: str): + if name not in model_mapping: + msg = f"[-] ADetailer: Model {name!r} not found. Available models: {list(model_mapping.keys())}" + raise ValueError(msg) + return model_mapping[name] + + def sort_bboxes(self, pred: PredictOutput) -> PredictOutput: + sortby = opts.data.get("ad_bbox_sortby", BBOX_SORTBY[0]) + sortby_idx = BBOX_SORTBY.index(sortby) + return sort_bboxes(pred, sortby_idx) + + def pred_preprocessing(self, p, pred: PredictOutput, args: ADetailerArgs): + pred = filter_by_ratio( + pred, low=args.ad_mask_min_ratio, high=args.ad_mask_max_ratio + ) + pred = filter_k_largest(pred, k=args.ad_mask_k_largest) + pred = self.sort_bboxes(pred) + masks = mask_preprocess( + pred.masks, + kernel=args.ad_dilate_erode, + x_offset=args.ad_x_offset, + y_offset=args.ad_y_offset, + merge_invert=args.ad_mask_merge_invert, + ) + + if is_img2img_inpaint(p) and not is_inpaint_only_masked(p): + image_mask = self.get_image_mask(p) + masks = self.inpaint_mask_filter(image_mask, masks) + return masks + + @staticmethod + def i2i_prompts_replace( + i2i, prompts: list[str], negative_prompts: list[str], j: int + ) -> None: + i1 = min(j, len(prompts) - 1) + i2 = min(j, len(negative_prompts) - 1) + prompt = prompts[i1] + negative_prompt = negative_prompts[i2] + i2i.prompt = prompt + i2i.negative_prompt = negative_prompt + + @staticmethod + def compare_prompt(extra_params: dict[str, Any], processed, n: int = 0): + pt = "ADetailer prompt" + suffix(n) + if pt in extra_params and extra_params[pt] != processed.all_prompts[0]: + print( + f"[-] ADetailer: applied {ordinal(n + 1)} ad_prompt: {processed.all_prompts[0]!r}" + ) + + ng = "ADetailer negative prompt" + suffix(n) + if ng in extra_params and extra_params[ng] != processed.all_negative_prompts[0]: + print( + f"[-] ADetailer: applied {ordinal(n + 1)} ad_negative_prompt: {processed.all_negative_prompts[0]!r}" + ) + + @staticmethod + def get_i2i_init_image(p, pp): + if is_skip_img2img(p): + return p.init_images[0] + return pp.image + + @staticmethod + def get_each_tab_seed(seed: int, i: int): + use_same_seed = shared.opts.data.get("ad_same_seed_for_each_tab", False) + return seed if use_same_seed else seed + i + + @staticmethod + def inpaint_mask_filter( + img2img_mask: Image.Image, ad_mask: list[Image.Image] + ) -> list[Image.Image]: + if ad_mask and img2img_mask.size != ad_mask[0].size: + img2img_mask = img2img_mask.resize(ad_mask[0].size, resample=images.LANCZOS) + return [mask for mask in ad_mask if has_intersection(img2img_mask, mask)] + + @staticmethod + def get_image_mask(p) -> Image.Image: + mask = p.image_mask + if getattr(p, "inpainting_mask_invert", False): + mask = ImageChops.invert(mask) + mask = create_binary_mask(mask) + + if is_skip_img2img(p): + if hasattr(p, "init_images") and p.init_images: + width, height = p.init_images[0].size + else: + msg = "[-] ADetailer: no init_images." + raise RuntimeError(msg) + else: + width, height = p.width, p.height + return images.resize_image(p.resize_mode, mask, width, height) + + @rich_traceback + def process(self, p, *args_): + if getattr(p, "_ad_disabled", False): + return + + if is_img2img_inpaint(p) and is_all_black(self.get_image_mask(p)): + p._ad_disabled = True + msg = ( + "[-] ADetailer: img2img inpainting with no mask -- adetailer disabled." + ) + print(msg) + return + + if not self.is_ad_enabled(*args_): + p._ad_disabled = True + return + + self.set_skip_img2img(p, *args_) + if getattr(p, "_ad_disabled", False): + # case when img2img inpainting with skip img2img + return + + arg_list = self.get_args(p, *args_) + + if hasattr(p, "_ad_xyz_prompt_sr"): + replaced_positive_prompt, replaced_negative_prompt = self.get_prompt( + p, arg_list[0] + ) + arg_list[0].ad_prompt = replaced_positive_prompt[0] + arg_list[0].ad_negative_prompt = replaced_negative_prompt[0] + + extra_params = self.extra_params(arg_list) + p.extra_generation_params.update(extra_params) + + def _postprocess_image_inner( + self, p, pp, args: ADetailerArgs, *, n: int = 0 + ) -> bool: + """ + Returns + ------- + bool + + `True` if image was processed, `False` otherwise. + """ + if state.interrupted or state.skipped: + return False + + i = get_i(p) + + i2i = self.get_i2i_p(p, args, pp.image) + seed, subseed = self.get_seed(p) + ad_prompts, ad_negatives = self.get_prompt(p, args) + + is_mediapipe = args.is_mediapipe() + + kwargs = {} + if is_mediapipe: + predictor = mediapipe_predict + ad_model = args.ad_model + else: + predictor = ultralytics_predict + ad_model = self.get_ad_model(args.ad_model) + kwargs["device"] = self.ultralytics_device + kwargs["classes"] = args.ad_model_classes + + with change_torch_load(): + pred = predictor(ad_model, pp.image, args.ad_confidence, **kwargs) + + if pred.preview is None: + print( + f"[-] ADetailer: nothing detected on image {i + 1} with {ordinal(n + 1)} settings." + ) + return False + + masks = self.pred_preprocessing(p, pred, args) + shared.state.assign_current_image(pred.preview) + + self.save_image( + p, + pred.preview, + condition="ad_save_previews", + suffix="-ad-preview" + suffix(n, "-"), + ) + + steps = len(masks) + processed = None + state.job_count += steps + + if is_mediapipe: + print(f"mediapipe: {steps} detected.") + + p2 = copy(i2i) + for j in range(steps): + p2.image_mask = masks[j] + p2.init_images[0] = ensure_pil_image(p2.init_images[0], "RGB") + self.i2i_prompts_replace(p2, ad_prompts, ad_negatives, j) + + if re.match(r"^\s*\[SKIP\]\s*$", p2.prompt): + continue + + p2.seed = self.get_each_tab_seed(seed, j) + p2.subseed = self.get_each_tab_seed(subseed, j) + + p2.cached_c = [None, None] + p2.cached_uc = [None, None] + try: + processed = process_images(p2) + except NansException as e: + msg = f"[-] ADetailer: 'NansException' occurred with {ordinal(n + 1)} settings.\n{e}" + print(msg, file=sys.stderr) + continue + finally: + p2.close() + + self.compare_prompt(p.extra_generation_params, processed, n=n) + p2 = copy(i2i) + p2.init_images = [processed.images[0]] + + if processed is not None: + pp.image = processed.images[0] + return True + + return False + + @rich_traceback + def postprocess_image(self, p, pp, *args_): + if getattr(p, "_ad_disabled", False) or not self.is_ad_enabled(*args_): + return + + pp.image = self.get_i2i_init_image(p, pp) + pp.image = ensure_pil_image(pp.image, "RGB") + init_image = copy(pp.image) + arg_list = self.get_args(p, *args_) + params_txt_content = self.read_params_txt() + + if need_call_postprocess(p): + dummy = Processed(p, [], p.seed, "") + with preserve_prompts(p): + p.scripts.postprocess(copy(p), dummy) + + is_processed = False + with CNHijackRestore(), pause_total_tqdm(), cn_allow_script_control(): + for n, args in enumerate(arg_list): + if args.need_skip(): + continue + is_processed |= self._postprocess_image_inner(p, pp, args, n=n) + + if is_processed and not is_skip_img2img(p): + self.save_image( + p, init_image, condition="ad_save_images_before", suffix="-ad-before" + ) + + if need_call_process(p): + with preserve_prompts(p): + copy_p = copy(p) + p.scripts.before_process(copy_p) + p.scripts.process(copy_p) + + self.write_params_txt(params_txt_content) + + +def on_after_component(component, **_kwargs): + global txt2img_submit_button, img2img_submit_button + if getattr(component, "elem_id", None) == "txt2img_generate": + txt2img_submit_button = component + return + + if getattr(component, "elem_id", None) == "img2img_generate": + img2img_submit_button = component + + +def on_ui_settings(): + section = ("ADetailer", ADETAILER) + shared.opts.add_option( + "ad_max_models", + shared.OptionInfo( + default=4, + label="Max tabs", + component=gr.Slider, + component_args={"minimum": 1, "maximum": 15, "step": 1}, + section=section, + ).needs_reload_ui(), + ) + + shared.opts.add_option( + "ad_extra_models_dir", + shared.OptionInfo( + default="", + label="Extra paths to scan adetailer models separated by vertical bars(|)", + component=gr.Textbox, + section=section, + ) + .info("eg. path\\to\\models|C:\\path\\to\\models|another/path/to/models") + .needs_reload_ui(), + ) + + shared.opts.add_option( + "ad_save_previews", + shared.OptionInfo(False, "Save mask previews", section=section), + ) + + shared.opts.add_option( + "ad_save_images_before", + shared.OptionInfo(False, "Save images before ADetailer", section=section), + ) + + shared.opts.add_option( + "ad_only_selected_scripts", + shared.OptionInfo( + True, "Apply only selected scripts to ADetailer", section=section + ), + ) + + textbox_args = { + "placeholder": "comma-separated list of script names", + "interactive": True, + } + + shared.opts.add_option( + "ad_script_names", + shared.OptionInfo( + default=SCRIPT_DEFAULT, + label="Script names to apply to ADetailer (separated by comma)", + component=gr.Textbox, + component_args=textbox_args, + section=section, + ), + ) + + shared.opts.add_option( + "ad_bbox_sortby", + shared.OptionInfo( + default="None", + label="Sort bounding boxes by", + component=gr.Radio, + component_args={"choices": BBOX_SORTBY}, + section=section, + ), + ) + + shared.opts.add_option( + "ad_same_seed_for_each_tab", + shared.OptionInfo( + False, "Use same seed for each tab in adetailer", section=section + ), + ) + + +# xyz_grid + + +class PromptSR(NamedTuple): + s: str + r: str + + +def set_value(p, x: Any, xs: Any, *, field: str): + if not hasattr(p, "_ad_xyz"): + p._ad_xyz = {} + p._ad_xyz[field] = x + + +def search_and_replace_prompt(p, x: Any, xs: Any, replace_in_main_prompt: bool): + if replace_in_main_prompt: + p.prompt = p.prompt.replace(xs[0], x) + p.negative_prompt = p.negative_prompt.replace(xs[0], x) + + if not hasattr(p, "_ad_xyz_prompt_sr"): + p._ad_xyz_prompt_sr = [] + p._ad_xyz_prompt_sr.append(PromptSR(s=xs[0], r=x)) + + +def make_axis_on_xyz_grid(): + xyz_grid = None + for script in scripts.scripts_data: + if script.script_class.__module__ == "xyz_grid.py": + xyz_grid = script.module + break + + if xyz_grid is None: + return + + model_list = ["None", *model_mapping.keys()] + samplers = [sampler.name for sampler in all_samplers] + + axis = [ + xyz_grid.AxisOption( + "[ADetailer] ADetailer model 1st", + str, + partial(set_value, field="ad_model"), + choices=lambda: model_list, + ), + xyz_grid.AxisOption( + "[ADetailer] ADetailer prompt 1st", + str, + partial(set_value, field="ad_prompt"), + ), + xyz_grid.AxisOption( + "[ADetailer] ADetailer negative prompt 1st", + str, + partial(set_value, field="ad_negative_prompt"), + ), + xyz_grid.AxisOption( + "[ADetailer] Prompt S/R (AD 1st)", + str, + partial(search_and_replace_prompt, replace_in_main_prompt=False), + ), + xyz_grid.AxisOption( + "[ADetailer] Prompt S/R (AD 1st and main prompt)", + str, + partial(search_and_replace_prompt, replace_in_main_prompt=True), + ), + xyz_grid.AxisOption( + "[ADetailer] Mask erosion / dilation 1st", + int, + partial(set_value, field="ad_dilate_erode"), + ), + xyz_grid.AxisOption( + "[ADetailer] Inpaint denoising strength 1st", + float, + partial(set_value, field="ad_denoising_strength"), + ), + xyz_grid.AxisOption( + "[ADetailer] Inpaint only masked 1st", + str, + partial(set_value, field="ad_inpaint_only_masked"), + choices=lambda: ["True", "False"], + ), + xyz_grid.AxisOption( + "[ADetailer] Inpaint only masked padding 1st", + int, + partial(set_value, field="ad_inpaint_only_masked_padding"), + ), + xyz_grid.AxisOption( + "[ADetailer] ADetailer sampler 1st", + str, + partial(set_value, field="ad_sampler"), + choices=lambda: samplers, + ), + xyz_grid.AxisOption( + "[ADetailer] ControlNet model 1st", + str, + partial(set_value, field="ad_controlnet_model"), + choices=lambda: ["None", "Passthrough", *get_cn_models()], + ), + ] + + if not any(x.label.startswith("[ADetailer]") for x in xyz_grid.axis_options): + xyz_grid.axis_options.extend(axis) + + +def on_before_ui(): + try: + make_axis_on_xyz_grid() + except Exception: + error = traceback.format_exc() + print( + f"[-] ADetailer: xyz_grid error:\n{error}", + file=sys.stderr, + ) + + +# api + + +def add_api_endpoints(_: gr.Blocks, app: FastAPI): + @app.get("/adetailer/v1/version") + async def version(): + return {"version": __version__} + + @app.get("/adetailer/v1/schema") + async def schema(): + if hasattr(ADetailerArgs, "model_json_schema"): + return ADetailerArgs.model_json_schema() + return ADetailerArgs.schema() + + @app.get("/adetailer/v1/ad_model") + async def ad_model(): + return {"ad_model": list(model_mapping)} + + +script_callbacks.on_ui_settings(on_ui_settings) +script_callbacks.on_after_component(on_after_component) +script_callbacks.on_app_started(add_api_endpoints) +script_callbacks.on_before_ui(on_before_ui) diff --git a/extensions/4-adetailer/scripts/__pycache__/!adetailer.cpython-310.pyc b/extensions/4-adetailer/scripts/__pycache__/!adetailer.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..d034c9eb2f1ddbf06d0bbc93a868550eb8e5cba1 Binary files /dev/null and b/extensions/4-adetailer/scripts/__pycache__/!adetailer.cpython-310.pyc differ diff --git a/extensions/4-adetailer/tests/__init__.py b/extensions/4-adetailer/tests/__init__.py new file mode 100644 index 0000000000000000000000000000000000000000..e69de29bb2d1d6434b8b29ae775ad8c2e48c5391 diff --git a/extensions/4-adetailer/tests/conftest.py b/extensions/4-adetailer/tests/conftest.py new file mode 100644 index 0000000000000000000000000000000000000000..eb33c236a6cdc7a72cde7f4175796badc87fc512 --- /dev/null +++ b/extensions/4-adetailer/tests/conftest.py @@ -0,0 +1,18 @@ +import pytest +import requests +from PIL import Image + + +def get_image(url: str) -> Image.Image: + resp = requests.get(url, stream=True, headers={"User-Agent": "Mozilla/5.0"}) + return Image.open(resp.raw) + + +@pytest.fixture(scope="session") +def sample_image(): + return get_image("https://i.imgur.com/E5OVXvn.png") + + +@pytest.fixture(scope="session") +def sample_image2(): + return get_image("https://i.imgur.com/px5UT7T.png") diff --git a/extensions/4-adetailer/tests/test_args.py b/extensions/4-adetailer/tests/test_args.py new file mode 100644 index 0000000000000000000000000000000000000000..e427162b99a14b5aaa36335fb1020a94d3f600e4 --- /dev/null +++ b/extensions/4-adetailer/tests/test_args.py @@ -0,0 +1,48 @@ +from __future__ import annotations + +import pytest + +from adetailer.args import ALL_ARGS, ADetailerArgs + + +def test_all_args() -> None: + args = ADetailerArgs() + for attr, _ in ALL_ARGS: + assert hasattr(args, attr), attr + + for attr, _ in args: + if attr == "is_api": + continue + assert attr in ALL_ARGS.attrs, attr + + +@pytest.mark.parametrize( + ("ad_model", "expect"), + [("mediapipe_face_full", True), ("face_yolov8n.pt", False)], +) +def test_is_mediapipe(ad_model: str, expect: bool) -> None: + args = ADetailerArgs(ad_model=ad_model) + assert args.is_mediapipe() is expect + + +@pytest.mark.parametrize( + ("ad_model", "expect"), + [("mediapipe_face_full", False), ("face_yolov8n.pt", False), ("None", True)], +) +def test_need_skip(ad_model: str, expect: bool) -> None: + args = ADetailerArgs(ad_model=ad_model) + assert args.need_skip() is expect + + +@pytest.mark.parametrize( + ("ad_model", "ad_tab_enable", "expect"), + [ + ("face_yolov8n.pt", False, True), + ("mediapipe_face_full", False, True), + ("None", True, True), + ("ace_yolov8s.pt", True, False), + ], +) +def test_need_skip_tab_enable(ad_model: str, ad_tab_enable: bool, expect: bool) -> None: + args = ADetailerArgs(ad_model=ad_model, ad_tab_enable=ad_tab_enable) + assert args.need_skip() is expect diff --git a/extensions/4-adetailer/tests/test_common.py b/extensions/4-adetailer/tests/test_common.py new file mode 100644 index 0000000000000000000000000000000000000000..c162990790357c5ee580070e56bcdb1e9640305e --- /dev/null +++ b/extensions/4-adetailer/tests/test_common.py @@ -0,0 +1,69 @@ +import numpy as np +from PIL import Image, ImageDraw + +from adetailer.common import create_bbox_from_mask, create_mask_from_bbox + + +def test_create_mask_from_bbox(): + img = Image.new("L", (10, 10), color="black") + bbox = [[1.0, 1.0, 2.0, 2.0], [7.0, 7.0, 8.0, 8.0]] + masks = create_mask_from_bbox(bbox, img.size) + expect1 = np.array( + [ + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 255, 255, 0, 0, 0, 0, 0, 0, 0], + [0, 255, 255, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + ], + dtype=np.uint8, + ) + expect2 = np.array( + [ + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 255, 255, 0], + [0, 0, 0, 0, 0, 0, 0, 255, 255, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + ], + dtype=np.uint8, + ) + assert len(masks) == len(bbox) + arr1 = np.array(masks[0]) + arr2 = np.array(masks[1]) + assert arr1.shape == expect1.shape + assert arr2.shape == expect2.shape + assert arr1.shape == (10, 10) + assert arr1.dtype == expect1.dtype + assert arr2.dtype == expect2.dtype + assert np.array_equal(arr1, expect1) + assert np.array_equal(arr2, expect2) + + # The function correctly receives a list of masks and the shape of the image. + + +def test_create_bbox_from_mask(): + mask = Image.new("L", (10, 10), color="black") + draw = ImageDraw.Draw(mask) + draw.rectangle((2, 2, 5, 5), fill="white") + + result = create_bbox_from_mask([mask], (10, 10)) + + assert isinstance(result, list) + assert len(result) == 1 + assert all(isinstance(bbox, list) for bbox in result) + assert all(len(bbox) == 4 for bbox in result) + assert result[0] == [2, 2, 6, 6] + + result = create_bbox_from_mask([mask], (256, 256)) + assert result[0] == [38, 38, 166, 166] diff --git a/extensions/4-adetailer/tests/test_mask.py b/extensions/4-adetailer/tests/test_mask.py new file mode 100644 index 0000000000000000000000000000000000000000..37191fd244b681141a7cd37d8d486c7709870f88 --- /dev/null +++ b/extensions/4-adetailer/tests/test_mask.py @@ -0,0 +1,236 @@ +import cv2 +import numpy as np +import pytest +from PIL import Image, ImageDraw + +from adetailer.mask import ( + bbox_area, + dilate_erode, + has_intersection, + is_all_black, + mask_invert, + mask_merge, + offset, +) + + +def test_dilate_positive_value(): + img = Image.new("L", (10, 10), color="black") + draw = ImageDraw.Draw(img) + draw.rectangle((3, 3, 5, 5), fill="white") + value = 3 + + result = dilate_erode(img, value) + + assert isinstance(result, Image.Image) + assert result.size == (10, 10) + + expect = np.array( + [ + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 255, 255, 255, 255, 255, 0, 0, 0], + [0, 0, 255, 255, 255, 255, 255, 0, 0, 0], + [0, 0, 255, 255, 255, 255, 255, 0, 0, 0], + [0, 0, 255, 255, 255, 255, 255, 0, 0, 0], + [0, 0, 255, 255, 255, 255, 255, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + ], + dtype=np.uint8, + ) + assert np.array_equal(np.array(result), expect) + + +def test_offset(): + img = Image.new("L", (10, 10), color="black") + draw = ImageDraw.Draw(img) + draw.rectangle((4, 4, 5, 5), fill="white") + + result = offset(img, x=1, y=2) + + assert isinstance(result, Image.Image) + assert result.size == (10, 10) + + expect = np.array( + [ + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 255, 255, 0, 0, 0], + [0, 0, 0, 0, 0, 255, 255, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], + ], + dtype=np.uint8, + ) + assert np.array_equal(np.array(result), expect) + + +class TestIsAllBlack: + def test_is_all_black_1(self): + img = Image.new("L", (10, 10), color="black") + assert is_all_black(img) + + draw = ImageDraw.Draw(img) + draw.rectangle((4, 4, 5, 5), fill="white") + assert not is_all_black(img) + + def test_is_all_black_2(self): + img = np.zeros((10, 10), dtype=np.uint8) + assert is_all_black(img) + + img[4:6, 4:6] = 255 + assert not is_all_black(img) + + def test_is_all_black_rgb_image_pil(self): + img = Image.new("RGB", (10, 10), color="red") + assert not is_all_black(img) + + img = Image.new("RGBA", (10, 10), color="red") + assert not is_all_black(img) + + def test_is_all_black_rgb_image_numpy(self): + img = np.full((10, 10, 4), 127, dtype=np.uint8) + with pytest.raises(cv2.error): + is_all_black(img) + + img = np.full((4, 10, 10), 0.5, dtype=np.float32) + with pytest.raises(cv2.error): + is_all_black(img) + + +class TestHasIntersection: + def test_has_intersection_1(self): + arr1 = np.array( + [ + [0, 0, 0, 0], + [0, 0, 0, 0], + [0, 0, 0, 0], + [0, 0, 0, 0], + ], + dtype=np.uint8, + ) + arr2 = arr1.copy() + assert not has_intersection(arr1, arr2) + + def test_has_intersection_2(self): + arr1 = np.array( + [ + [0, 0, 0, 0], + [0, 255, 255, 0], + [0, 255, 255, 0], + [0, 0, 0, 0], + ], + dtype=np.uint8, + ) + arr2 = np.array( + [ + [0, 0, 0, 0], + [0, 0, 0, 0], + [0, 0, 255, 255], + [0, 0, 255, 255], + ], + dtype=np.uint8, + ) + assert has_intersection(arr1, arr2) + + arr3 = np.array( + [ + [255, 0, 0, 0], + [0, 0, 0, 0], + [0, 0, 0, 255], + [0, 0, 255, 255], + ], + dtype=np.uint8, + ) + assert not has_intersection(arr1, arr3) + + def test_has_intersection_3(self): + img1 = Image.new("L", (10, 10), color="black") + draw1 = ImageDraw.Draw(img1) + draw1.rectangle((3, 3, 5, 5), fill="white") + img2 = Image.new("L", (10, 10), color="black") + draw2 = ImageDraw.Draw(img2) + draw2.rectangle((6, 6, 8, 8), fill="white") + assert not has_intersection(img1, img2) + + img3 = Image.new("L", (10, 10), color="black") + draw3 = ImageDraw.Draw(img3) + draw3.rectangle((2, 2, 8, 8), fill="white") + assert has_intersection(img1, img3) + + def test_has_intersection_4(self): + img1 = Image.new("RGB", (10, 10), color="black") + draw1 = ImageDraw.Draw(img1) + draw1.rectangle((3, 3, 5, 5), fill="white") + img2 = Image.new("RGBA", (10, 10), color="black") + draw2 = ImageDraw.Draw(img2) + draw2.rectangle((2, 2, 8, 8), fill="white") + assert has_intersection(img1, img2) + + def test_has_intersection_5(self): + img1 = Image.new("RGB", (10, 10), color="black") + draw1 = ImageDraw.Draw(img1) + draw1.rectangle((4, 4, 5, 5), fill="white") + img2 = np.full((10, 10, 4), 255, dtype=np.uint8) + assert has_intersection(img1, img2) + + +def test_bbox_area(): + bbox = [0.0, 0.0, 10.0, 10.0] + assert bbox_area(bbox) == 100 + + +class TestMaskMerge: + def test_mask_merge(self): + img1 = Image.new("L", (10, 10), color="black") + draw1 = ImageDraw.Draw(img1) + draw1.rectangle((3, 3, 5, 5), fill="white") + + img2 = Image.new("L", (10, 10), color="black") + draw2 = ImageDraw.Draw(img2) + draw2.rectangle((6, 6, 8, 8), fill="white") + + merged = mask_merge([img1, img2]) + assert len(merged) == 1 + + expect = Image.new("L", (10, 10), color="black") + draw3 = ImageDraw.Draw(expect) + draw3.rectangle((3, 3, 5, 5), fill="white") + draw3.rectangle((6, 6, 8, 8), fill="white") + + assert np.array_equal(np.array(merged[0]), np.array(expect)) + + def test_merge_mask_different_size(self): + img1 = Image.new("L", (10, 10), color="black") + draw1 = ImageDraw.Draw(img1) + draw1.rectangle((3, 3, 5, 5), fill="white") + + img2 = Image.new("L", (20, 20), color="black") + draw2 = ImageDraw.Draw(img2) + draw2.rectangle((6, 6, 8, 8), fill="white") + + with pytest.raises( + cv2.error, match="-209:Sizes of input arguments do not match" + ): + mask_merge([img1, img2]) + + +def test_mask_invert(): + img = Image.new("L", (10, 10), color="black") + draw = ImageDraw.Draw(img) + draw.rectangle((3, 3, 5, 5), fill="white") + + inverted = mask_invert([img]) + assert len(inverted) == 1 + + expect = Image.new("L", (10, 10), color="white") + draw = ImageDraw.Draw(expect) + draw.rectangle((3, 3, 5, 5), fill="black") + + assert np.array_equal(np.array(inverted[0]), np.array(expect)) diff --git a/extensions/4-adetailer/tests/test_mediapipe.py b/extensions/4-adetailer/tests/test_mediapipe.py new file mode 100644 index 0000000000000000000000000000000000000000..7ddcdfe7c23e8a33c8be4c3ed889e2debd3bb484 --- /dev/null +++ b/extensions/4-adetailer/tests/test_mediapipe.py @@ -0,0 +1,18 @@ +import pytest +from PIL import Image + +from adetailer.mediapipe import mediapipe_predict + + +@pytest.mark.parametrize( + "model_name", + [ + "mediapipe_face_short", + "mediapipe_face_full", + "mediapipe_face_mesh", + "mediapipe_face_mesh_eyes_only", + ], +) +def test_mediapipe(sample_image2: Image.Image, model_name: str): + result = mediapipe_predict(model_name, sample_image2) + assert result.preview is not None diff --git a/extensions/4-adetailer/tests/test_ultralytics.py b/extensions/4-adetailer/tests/test_ultralytics.py new file mode 100644 index 0000000000000000000000000000000000000000..c7726078fcf6401c9c7f45e8c04ed57f91c759a6 --- /dev/null +++ b/extensions/4-adetailer/tests/test_ultralytics.py @@ -0,0 +1,50 @@ +import pytest +from huggingface_hub import hf_hub_download +from PIL import Image + +from adetailer.ultralytics import ultralytics_predict + + +@pytest.mark.parametrize( + "model_name", + [ + "face_yolov8n.pt", + "face_yolov8n_v2.pt", + "face_yolov8s.pt", + "face_yolov9c.pt", + "hand_yolov8n.pt", + "hand_yolov8s.pt", + "hand_yolov9c.pt", + "person_yolov8n-seg.pt", + "person_yolov8s-seg.pt", + "person_yolov8m-seg.pt", + "deepfashion2_yolov8s-seg.pt", + ], +) +def test_ultralytics_hf_models(sample_image: Image.Image, model_name: str): + model_path = hf_hub_download("Bingsu/adetailer", model_name) + result = ultralytics_predict(model_path, sample_image) + assert result.preview is not None + + +def test_yolo_world_default(sample_image: Image.Image): + model_path = hf_hub_download("Bingsu/yolo-world-mirror", "yolov8x-worldv2.pt") + result = ultralytics_predict(model_path, sample_image) + assert result.preview is not None + + +@pytest.mark.parametrize( + "klass", + [ + "person", + "bird", + "yellow bird", + "person,glasses,headphone", + "person,bird", + "glasses,yellow bird", + ], +) +def test_yolo_world(sample_image2: Image.Image, klass: str): + model_path = hf_hub_download("Bingsu/yolo-world-mirror", "yolov8x-worldv2.pt") + result = ultralytics_predict(model_path, sample_image2, classes=klass) + assert result.preview is not None diff --git a/extensions/CFG_Rescale_webui/.gitignore b/extensions/CFG_Rescale_webui/.gitignore new file mode 100644 index 0000000000000000000000000000000000000000..68bc17f9ff2104a9d7b6777058bb4c343ca72609 --- /dev/null +++ b/extensions/CFG_Rescale_webui/.gitignore @@ -0,0 +1,160 @@ +# Byte-compiled / optimized / DLL files +__pycache__/ +*.py[cod] +*$py.class + +# C extensions +*.so + +# Distribution / packaging +.Python +build/ +develop-eggs/ +dist/ +downloads/ +eggs/ +.eggs/ +lib/ +lib64/ +parts/ +sdist/ +var/ +wheels/ +share/python-wheels/ +*.egg-info/ +.installed.cfg +*.egg +MANIFEST + +# PyInstaller +# Usually these files are written by a python script from a template +# before PyInstaller builds the exe, so as to inject date/other infos into it. +*.manifest +*.spec + +# Installer logs +pip-log.txt +pip-delete-this-directory.txt + +# Unit test / coverage reports +htmlcov/ +.tox/ +.nox/ +.coverage +.coverage.* +.cache +nosetests.xml +coverage.xml +*.cover +*.py,cover +.hypothesis/ +.pytest_cache/ +cover/ + +# Translations +*.mo +*.pot + +# Django stuff: +*.log +local_settings.py +db.sqlite3 +db.sqlite3-journal + +# Flask stuff: +instance/ +.webassets-cache + +# Scrapy stuff: +.scrapy + +# Sphinx documentation +docs/_build/ + +# PyBuilder +.pybuilder/ +target/ + +# Jupyter Notebook +.ipynb_checkpoints + +# IPython +profile_default/ +ipython_config.py + +# pyenv +# For a library or package, you might want to ignore these files since the code is +# intended to run in multiple environments; otherwise, check them in: +# .python-version + +# pipenv +# According to pypa/pipenv#598, it is recommended to include Pipfile.lock in version control. +# However, in case of collaboration, if having platform-specific dependencies or dependencies +# having no cross-platform support, pipenv may install dependencies that don't work, or not +# install all needed dependencies. +#Pipfile.lock + +# poetry +# Similar to Pipfile.lock, it is generally recommended to include poetry.lock in version control. +# This is especially recommended for binary packages to ensure reproducibility, and is more +# commonly ignored for libraries. +# https://python-poetry.org/docs/basic-usage/#commit-your-poetrylock-file-to-version-control +#poetry.lock + +# pdm +# Similar to Pipfile.lock, it is generally recommended to include pdm.lock in version control. +#pdm.lock +# pdm stores project-wide configurations in .pdm.toml, but it is recommended to not include it +# in version control. +# https://pdm.fming.dev/#use-with-ide +.pdm.toml + +# PEP 582; used by e.g. github.com/David-OConnor/pyflow and github.com/pdm-project/pdm +__pypackages__/ + +# Celery stuff +celerybeat-schedule +celerybeat.pid + +# SageMath parsed files +*.sage.py + +# Environments +.env +.venv +env/ +venv/ +ENV/ +env.bak/ +venv.bak/ + +# Spyder project settings +.spyderproject +.spyproject + +# Rope project settings +.ropeproject + +# mkdocs documentation +/site + +# mypy +.mypy_cache/ +.dmypy.json +dmypy.json + +# Pyre type checker +.pyre/ + +# pytype static type analyzer +.pytype/ + +# Cython debug symbols +cython_debug/ + +# PyCharm +# JetBrains specific template is maintained in a separate JetBrains.gitignore that can +# be found at https://github.com/github/gitignore/blob/main/Global/JetBrains.gitignore +# and can be added to the global gitignore or merged into this file. For a more nuclear +# option (not recommended) you can uncomment the following to ignore the entire idea folder. +#.idea/ diff --git a/extensions/CFG_Rescale_webui/LICENSE b/extensions/CFG_Rescale_webui/LICENSE new file mode 100644 index 0000000000000000000000000000000000000000..58c0507582ba181710a386bc9134d238627fa3fb --- /dev/null +++ b/extensions/CFG_Rescale_webui/LICENSE @@ -0,0 +1,21 @@ +MIT License + +Copyright (c) 2023 CartUniverse + +Permission is hereby granted, free of charge, to any person obtaining a copy +of this software and associated documentation files (the "Software"), to deal +in the Software without restriction, including without limitation the rights +to use, copy, modify, merge, publish, distribute, sublicense, and/or sell +copies of the Software, and to permit persons to whom the Software is +furnished to do so, subject to the following conditions: + +The above copyright notice and this permission notice shall be included in all +copies or substantial portions of the Software. + +THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR +IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, +FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE +AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER +LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, +OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE +SOFTWARE. diff --git a/extensions/CFG_Rescale_webui/README.md b/extensions/CFG_Rescale_webui/README.md new file mode 100644 index 0000000000000000000000000000000000000000..b11c1902c227e557baf20d0fc472c467b0f2643c --- /dev/null +++ b/extensions/CFG_Rescale_webui/README.md @@ -0,0 +1,10 @@ +# CFG_Rescale_webui +Adds a CFG rescale option to A1111 webui for vpred models. Implements features described in https://arxiv.org/pdf/2305.08891.pdf + +When installed, you will see a CFG slider below appear below the seed selection. + +The recommended settings from the paper is 0.7 CFG rescale. The paper recommends using it at 7.5 CFG, but I find that the default 7.0 CFG works just fine as well. +If you notice your images are dull or muddy, try setting CFG Rescale to 0.5 and/or turning on color fix. + +# Extra Features +Auto color fix: CFG rescale can result in the color palette of the image becoming smaller, resulting in muddy or brown images. Turning this on attempts to return the image colors to full range again, making it appear more vibrant and natural. diff --git a/extensions/CFG_Rescale_webui/scripts/CFGRescale.py b/extensions/CFG_Rescale_webui/scripts/CFGRescale.py new file mode 100644 index 0000000000000000000000000000000000000000..2b7b793649ff117ac798a780570bf7ff1eb02ecf --- /dev/null +++ b/extensions/CFG_Rescale_webui/scripts/CFGRescale.py @@ -0,0 +1,225 @@ +import math +import torch +import re +import gradio as gr +import numpy as np +import modules.scripts as scripts +import modules.images as saving +from modules import devices, processing, shared, sd_samplers_kdiffusion, sd_samplers_compvis, script_callbacks +from modules.processing import Processed +from modules.shared import opts, state +from ldm.models.diffusion import ddim +from PIL import Image + +from ldm.modules.diffusionmodules.util import make_ddim_sampling_parameters, noise_like + +re_prompt_cfgr = re.compile(r"
Take care of VRAM usage!'; + div.appendChild(tip); + + div.addEventListener('mousedown', function (e) { + if (e.button === 0) { onBoxMouseDown(e, is_t2i, idx); } + }); + div.addEventListener('mousemove', function (e) { + updateCursorStyle(e, is_t2i, idx); + }); + + const shower = function() { // insert to DOM if necessary + if (!gradioApp().querySelector('#' + div.id)) { + locator().appendChild(div); + } + } + bboxes[idx] = [div, bbox, shower]; + } + + // Show the bounding box + displayBox(canvas, is_t2i, bboxes[idx]); + return true; + } else { + if (!bboxes[idx]) { return false; } + const [div, bbox, shower] = bboxes[idx]; + div.style.display = 'none'; + } + return false; +} + +function onBoxChange(is_t2i, idx, what, v) { + // This function handles all the changes of the bounding box + // Including the rendering and python slider update + let bboxes = null; + let canvas = null; + if (is_t2i) { + bboxes = t2i_bboxes; + canvas = gradioApp().querySelector('#MD-bbox-ref-t2i img'); + } else { + bboxes = i2i_bboxes; + canvas = gradioApp().querySelector('#MD-bbox-ref-i2i img'); + } + if (!bboxes[idx] || !canvas) { + switch (what) { + case 'x': return DEFAULT_X; + case 'y': return DEFAULT_Y; + case 'w': return DEFAULT_W; + case 'h': return DEFAULT_H; + } + } + const [div, bbox, shower] = bboxes[idx]; + if (div.style.display === 'none') { return v; } + + // parse trigger + switch (what) { + case 'x': bbox[0] = v; break; + case 'y': bbox[1] = v; break; + case 'w': bbox[2] = v; break; + case 'h': bbox[3] = v; break; + } + displayBox(canvas, is_t2i, bboxes[idx]); + return v; +} + +// ↓↓↓ called from js ↓↓↓ + +function getSeedInfo(is_t2i, id, current_seed) { + const info_id = is_t2i ? '#html_info_txt2img' : '#html_info_img2img'; + const info_div = gradioApp().querySelector(info_id); + try{ + current_seed = parseInt(current_seed); + } catch(e) { + current_seed = -1; + } + if (!info_div) return current_seed; + let info = info_div.innerHTML; + if (!info) return current_seed; + // remove all html tags + info = info.replace(/<[^>]*>/g, ''); + // Find a json string 'region control:' in the info + // get its index + idx = info.indexOf('Region control'); + if (idx == -1) return current_seed; + // get the json string (detect the bracket) + // find the first '{' + let start_idx = info.indexOf('{', idx); + let bracket = 1; + let end_idx = start_idx + 1; + while (bracket > 0 && end_idx < info.length) { + if (info[end_idx] == '{') bracket++; + if (info[end_idx] == '}') bracket--; + end_idx++; + } + if (bracket > 0) { + return current_seed; + } + // get the json string + let json_str = info.substring(start_idx, end_idx); + // replace the single quote to double quote + json_str = json_str.replace(/'/g, '"'); + // replace python True to javascript true, False to false + json_str = json_str.replace(/True/g, 'true'); + // parse the json string + let json = JSON.parse(json_str); + // get the seed if the region id is in the json + const region_id = 'Region ' + id.toString(); + if (!(region_id in json)) return current_seed; + const region = json[region_id]; + if (!('seed' in region)) return current_seed; + let seed = region['seed']; + try{ + seed = parseInt(seed); + } catch(e) { + return current_seed; + } + return seed; +} + +function displayBox(canvas, is_t2i, bbox_info) { + // check null input + const [div, bbox, shower] = bbox_info; + const [x, y, w, h] = bbox; + if (!canvas || !div || x == null || y == null || w == null || h == null) { return; } + + // client: canvas widget display size + // natural: content image real size + let vpScale = Math.min(canvas.clientWidth / canvas.naturalWidth, canvas.clientHeight / canvas.naturalHeight); + let canvasCenterX = canvas.clientWidth / 2; + let canvasCenterY = canvas.clientHeight / 2; + let scaledX = canvas.naturalWidth * vpScale; + let scaledY = canvas.naturalHeight * vpScale; + let viewRectLeft = canvasCenterX - scaledX / 2; + let viewRectRight = canvasCenterX + scaledX / 2; + let viewRectTop = canvasCenterY - scaledY / 2; + let viewRectDown = canvasCenterY + scaledY / 2; + + let xDiv = viewRectLeft + scaledX * x; + let yDiv = viewRectTop + scaledY * y; + let wDiv = Math.min(scaledX * w, viewRectRight - xDiv); + let hDiv = Math.min(scaledY * h, viewRectDown - yDiv); + + // Calculate warning bbox size + let upscalerFactor = 1.0; + if (!is_t2i) { + const upscalerInput = parseFloat(gradioApp().querySelector('#MD-i2i-upscaler-factor input').value); + if (!isNaN(upscalerInput)) upscalerFactor = upscalerInput; + } + let maxSize = BBOX_WARNING_SIZE / upscalerFactor * vpScale; + let maxW = maxSize / scaledX; + let maxH = maxSize / scaledY; + if (w > maxW || h > maxH) { + div.querySelector('span').style.display = 'block'; + } else { + div.querySelector('span').style.display = 'none'; + } + + // update
Please test on small images before actual upscale. Default params require denoise <= 0.6
') + with gr.Row(variant='compact'): + noise_inverse_retouch = gr.Slider(minimum=1, maximum=100, step=0.1, label='Retouch', value=1, elem_id=uid('noise-inverse-retouch')) + noise_inverse_renoise_strength = gr.Slider(minimum=0, maximum=2, step=0.01, label='Renoise strength', value=1, elem_id=uid('noise-inverse-renoise-strength')) + noise_inverse_renoise_kernel = gr.Slider(minimum=2, maximum=512, step=1, label='Renoise kernel size', value=64, elem_id=uid('noise-inverse-renoise-kernel')) + + # The control includes txt2img and img2img, we use t2i and i2i to distinguish them + with gr.Group(elem_id=f'MD-bbox-control-{tab}') as tab_bbox: + with gr.Accordion('Region Prompt Control', open=False): + with gr.Row(variant='compact'): + enable_bbox_control = gr.Checkbox(label='Enable Control', value=False, elem_id=uid('enable-bbox-control')) + draw_background = gr.Checkbox(label='Draw full canvas background', value=False, elem_id=uid('draw-background')) + causal_layers = gr.Checkbox(label='Causalize layers', value=False, visible=False, elem_id='MD-causal-layers') # NOTE: currently not used + + with gr.Row(variant='compact'): + create_button = gr.Button(value="Create txt2img canvas" if not is_img2img else "From img2img", elem_id='MD-create-canvas') + + bbox_controls: List[Component] = [] # control set for each bbox + with gr.Row(variant='compact'): + ref_image = gr.Image(label='Ref image (for conviently locate regions)', image_mode=None, elem_id=f'MD-bbox-ref-{tab}', interactive=True) + if not is_img2img: + # gradio has a serious bug: it cannot accept multiple inputs when you use both js and fn. + # to workaround this, we concat the inputs into a single string and parse it in js + def create_t2i_ref(string): + w, h = [int(x) for x in string.split('x')] + w = max(w, opt_f) + h = max(h, opt_f) + return np.zeros(shape=(h, w, 3), dtype=np.uint8) + 255 + create_button.click( + fn=create_t2i_ref, + inputs=overwrite_size, + outputs=ref_image, + _js='onCreateT2IRefClick', + show_progress=False) + else: + create_button.click(fn=None, outputs=ref_image, _js='onCreateI2IRefClick', show_progress=False) + + with gr.Row(variant='compact'): + cfg_name = gr.Textbox(label='Custom Config File', value='config.json', elem_id=uid('cfg-name')) + cfg_dump = gr.Button(value='💾 Save', variant='tool') + cfg_load = gr.Button(value='⚙️ Load', variant='tool') + + with gr.Row(variant='compact'): + cfg_tip = gr.HTML(value='', visible=False) + + for i in range(BBOX_MAX_NUM): + # Only when displaying & png generate info we use index i+1, in other cases we use i + with gr.Accordion(f'Region {i+1}', open=False, elem_id=f'MD-accordion-{tab}-{i}'): + with gr.Row(variant='compact'): + e = gr.Checkbox(label=f'Enable Region {i+1}', value=False, elem_id=f'MD-bbox-{tab}-{i}-enable') + e.change(fn=None, inputs=e, outputs=e, _js=f'e => onBoxEnableClick({is_t2i}, {i}, e)', show_progress=False) + + blend_mode = gr.Dropdown(label='Type', choices=[e.value for e in BlendMode], value=BlendMode.BACKGROUND.value, elem_id=f'MD-{tab}-{i}-blend-mode') + feather_ratio = gr.Slider(label='Feather', value=0.2, minimum=0, maximum=1, step=0.05, visible=False, elem_id=f'MD-{tab}-{i}-feather') + + blend_mode.change(fn=lambda x: gr_show(x==BlendMode.FOREGROUND.value), inputs=blend_mode, outputs=feather_ratio, show_progress=False) + + with gr.Row(variant='compact'): + x = gr.Slider(label='x', value=0.4, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-x') + y = gr.Slider(label='y', value=0.4, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-y') + + with gr.Row(variant='compact'): + w = gr.Slider(label='w', value=0.2, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-w') + h = gr.Slider(label='h', value=0.2, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-h') + + x.change(fn=None, inputs=x, outputs=x, _js=f'v => onBoxChange({is_t2i}, {i}, "x", v)', show_progress=False) + y.change(fn=None, inputs=y, outputs=y, _js=f'v => onBoxChange({is_t2i}, {i}, "y", v)', show_progress=False) + w.change(fn=None, inputs=w, outputs=w, _js=f'v => onBoxChange({is_t2i}, {i}, "w", v)', show_progress=False) + h.change(fn=None, inputs=h, outputs=h, _js=f'v => onBoxChange({is_t2i}, {i}, "h", v)', show_progress=False) + + prompt = gr.Text(show_label=False, placeholder=f'Prompt, will append to your {tab} prompt', max_lines=2, elem_id=f'MD-{tab}-{i}-prompt') + neg_prompt = gr.Text(show_label=False, placeholder='Negative Prompt, will also be appended', max_lines=1, elem_id=f'MD-{tab}-{i}-neg-prompt') + with gr.Row(variant='compact'): + seed = gr.Number(label='Seed', value=-1, visible=True, elem_id=f'MD-{tab}-{i}-seed') + random_seed = gr.Button(value='🎲', variant='tool', elem_id=f'MD-{tab}-{i}-random_seed') + reuse_seed = gr.Button(value='♻️', variant='tool', elem_id=f'MD-{tab}-{i}-reuse_seed') + random_seed.click(fn=lambda: -1, outputs=seed, show_progress=False) + reuse_seed.click(fn=None, inputs=seed, outputs=seed, _js=f'e => getSeedInfo({is_t2i}, {i+1}, e)', show_progress=False) + + control = [e, x, y, w, h, prompt, neg_prompt, blend_mode, feather_ratio, seed] + assert len(control) == NUM_BBOX_PARAMS + bbox_controls.extend(control) + + # NOTE: dynamically hard coded!! + load_regions_js = ''' + function onBoxChangeAll(ref_image, cfg_name, ...args) { + const is_t2i = %s; + const n_bbox = %d; + const n_ctrl = %d; + for (let i=0; iPlease test on small images before actual upscale. Default params require denoise <= 0.6
') + with gr.Row(variant='compact'): + noise_inverse_retouch = gr.Slider(minimum=1, maximum=100, step=0.1, label='Retouch', value=1, elem_id=uid('noise-inverse-retouch')) + noise_inverse_renoise_strength = gr.Slider(minimum=0, maximum=2, step=0.01, label='Renoise strength', value=1, elem_id=uid('noise-inverse-renoise-strength')) + noise_inverse_renoise_kernel = gr.Slider(minimum=2, maximum=512, step=1, label='Renoise kernel size', value=64, elem_id=uid('noise-inverse-renoise-kernel')) + + # The control includes txt2img and img2img, we use t2i and i2i to distinguish them + + return [ + enabled, method, + keep_input_size, + window_size, overlap, batch_size, + scale_factor, + noise_inverse, noise_inverse_steps, noise_inverse_retouch, noise_inverse_renoise_strength, noise_inverse_renoise_kernel, + control_tensor_cpu, + random_jitter, + c1,c2,c3,gaussian_filter,strength,sigma,batch_size_g,mixture_mode + ] + + + def process(self, p: Processing, + enabled: bool, method: str, + keep_input_size: bool, + window_size:int, overlap: int, tile_batch_size: int, + scale_factor: float, + noise_inverse: bool, noise_inverse_steps: int, noise_inverse_retouch: float, noise_inverse_renoise_strength: float, noise_inverse_renoise_kernel: int, + control_tensor_cpu: bool, + random_jitter:bool, + c1,c2,c3,gaussian_filter,strength,sigma,batch_size_g,mixture_mode + ): + + # unhijack & unhook, in case it broke at last time + self.reset() + p.mixture = mixture_mode + if not mixture_mode: + sigma = sigma/2 + if not enabled: return + + ''' upscale ''' + # store canvas size settings + if hasattr(p, "init_images"): + p.init_images_original_md = [img.copy() for img in p.init_images] + p.width_original_md = p.width + p.height_original_md = p.height + p.current_scale_num = 1 + p.gaussian_filter = gaussian_filter + p.scale_factor = int(scale_factor) + + is_img2img = hasattr(p, "init_images") and len(p.init_images) > 0 + if is_img2img: + init_img = p.init_images[0] + init_img = images.flatten(init_img, opts.img2img_background_color) + image = init_img + if keep_input_size: + p.width = image.width + p.height = image.height + p.width_original_md = p.width + p.height_original_md = p.height + else: #XXX:To adapt to noise inversion, we do not multiply the scale factor here + p.width = p.width_original_md + p.height = p.height_original_md + else: # txt2img + p.width = p.width_original_md + p.height = p.height_original_md + + if 'png info': + info = {} + p.extra_generation_params["Tiled Diffusion"] = info + + info['Method'] = method + info['Window Size'] = window_size + info['Tile Overlap'] = overlap + info['Tile batch size'] = tile_batch_size + info["Global batch size"] = batch_size_g + + if is_img2img: + info['Upscale factor'] = scale_factor + if keep_input_size: + info['Keep input size'] = keep_input_size + if noise_inverse: + info['NoiseInv'] = noise_inverse + info['NoiseInv Steps'] = noise_inverse_steps + info['NoiseInv Retouch'] = noise_inverse_retouch + info['NoiseInv Renoise strength'] = noise_inverse_renoise_strength + info['NoiseInv Kernel size'] = noise_inverse_renoise_kernel + + ''' ControlNet hackin ''' + try: + from scripts.cldm import ControlNet + + for script in p.scripts.scripts + p.scripts.alwayson_scripts: + if hasattr(script, "latest_network") and script.title().lower() == "controlnet": + self.controlnet_script = script + print("[Demo Fusion] ControlNet found, support is enabled.") + break + except ImportError: + pass + + ''' StableSR hackin ''' + for script in p.scripts.scripts: + if hasattr(script, "stablesr_model") and script.title().lower() == "stablesr": + if script.stablesr_model is not None: + self.stablesr_script = script + print("[Demo Fusion] StableSR found, support is enabled.") + break + + ''' hijack inner APIs, see unhijack in reset() ''' + Script.create_sampler_original_md = sd_samplers.create_sampler + + sd_samplers.create_sampler = lambda name, model: self.create_sampler_hijack( + name, model, p, Method_2(method), control_tensor_cpu,window_size, noise_inverse, noise_inverse_steps, noise_inverse_retouch, + noise_inverse_renoise_strength, noise_inverse_renoise_kernel, overlap, tile_batch_size,random_jitter,batch_size_g + ) + + + p.sample = lambda conditioning, unconditional_conditioning,seeds, subseeds, subseed_strength, prompts: self.sample_hijack( + conditioning, unconditional_conditioning, seeds, subseeds, subseed_strength, prompts,p, is_img2img, + window_size, overlap, tile_batch_size,random_jitter,c1,c2,c3,strength,sigma,batch_size_g) + + processing.create_infotext_ori = processing.create_infotext + + p.width_list = [p.height] + p.height_list = [p.height] + + processing.create_infotext = create_infotext_hijack + ## end + + + def postprocess_batch(self, p: Processing, enabled, *args, **kwargs): + if not enabled: return + + if self.delegate is not None: self.delegate.reset_controlnet_tensors() + + def postprocess_batch_list(self, p, pp, enabled, *args, **kwargs): + if not enabled: return + for idx,image in enumerate(pp.images): + idx_b = idx//p.batch_size + pp.images[idx] = image[:,:image.shape[1]//(p.scale_factor)*(idx_b+1),:image.shape[2]//(p.scale_factor)*(idx_b+1)] + p.seeds = [item for _ in range(p.scale_factor) for item in p.seeds] + p.prompts = [item for _ in range(p.scale_factor) for item in p.prompts] + p.all_negative_prompts = [item for _ in range(p.scale_factor) for item in p.all_negative_prompts] + p.negative_prompts = [item for _ in range(p.scale_factor) for item in p.negative_prompts] + if p.color_corrections != None: + p.color_corrections = [item for _ in range(p.scale_factor) for item in p.color_corrections] + p.width_list = [item*(idx+1) for idx in range(p.scale_factor) for item in [p.width for _ in range(p.batch_size)]] + p.height_list = [item*(idx+1) for idx in range(p.scale_factor) for item in [p.height for _ in range(p.batch_size)]] + return + + def postprocess(self, p: Processing, processed, enabled, *args): + if not enabled: return + # unhijack & unhook + self.reset() + + # restore canvas size settings + if hasattr(p, 'init_images') and hasattr(p, 'init_images_original_md'): + p.init_images.clear() # NOTE: do NOT change the list object, compatible with shallow copy of XYZ-plot + p.init_images.extend(p.init_images_original_md) + del p.init_images_original_md + p.width = p.width_original_md ; del p.width_original_md + p.height = p.height_original_md ; del p.height_original_md + + # clean up noise inverse latent for folder-based processing + if hasattr(p, 'noise_inverse_latent'): + del p.noise_inverse_latent + + ''' ↓↓↓ inner API hijack ↓↓↓ ''' + @torch.no_grad() + def sample_hijack(self, conditioning, unconditional_conditioning,seeds, subseeds, subseed_strength, prompts,p,image_ori,window_size, overlap, tile_batch_size,random_jitter,c1,c2,c3,strength,sigma,batch_size_g): + ################################################## Phase Initialization ###################################################### + + if not image_ori: + p.current_step = 0 + p.denoising_strength = strength + # p.sampler = sd_samplers.create_sampler(p.sampler_name, p.sd_model) #NOTE:Wrong but very useful. If corrected, please replace with the content with the following lines + # latents = p.rng.next() + + p.sampler = Script.create_sampler_original_md(p.sampler_name, p.sd_model) #scale + x = p.rng.next() + print("### Phase 1 Denoising ###") + latents = p.sampler.sample(p, x, conditioning, unconditional_conditioning, image_conditioning=p.txt2img_image_conditioning(x)) + latents_ = F.pad(latents, (0, latents.shape[3]*(p.scale_factor-1), 0, latents.shape[2]*(p.scale_factor-1))) + res = latents_ + del x + p.sampler = sd_samplers.create_sampler(p.sampler_name, p.sd_model) + starting_scale = 2 + else: # img2img + print("### Encoding Real Image ###") + latents = p.init_latent + starting_scale = 1 + + + anchor_mean = latents.mean() + anchor_std = latents.std() + + devices.torch_gc() + + ####################################################### Phase Upscaling ##################################################### + p.cosine_scale_1 = c1 + p.cosine_scale_2 = c2 + p.cosine_scale_3 = c3 + self.delegate.sig = sigma + p.latents = latents + for current_scale_num in range(starting_scale, p.scale_factor+1): + p.current_scale_num = current_scale_num + print("### Phase {} Denoising ###".format(current_scale_num)) + p.current_height = p.height_original_md * current_scale_num + p.current_width = p.width_original_md * current_scale_num + + + p.latents = F.interpolate(p.latents, size=(int(p.current_height / opt_f), int(p.current_width / opt_f)), mode='bicubic') + p.rng = rng.ImageRNG(p.latents.shape[1:], p.seeds, subseeds=p.subseeds, subseed_strength=p.subseed_strength, seed_resize_from_h=p.seed_resize_from_h, seed_resize_from_w=p.seed_resize_from_w) + + + self.delegate.w = int(p.current_width / opt_f) + self.delegate.h = int(p.current_height / opt_f) + self.delegate.get_views(overlap, tile_batch_size,batch_size_g) + + info = ', '.join([ + # f"{method.value} hooked into {name!r} sampler", + f"Tile size: {self.delegate.window_size}", + f"Tile count: {self.delegate.num_tiles}", + f"Batch size: {self.delegate.tile_bs}", + f"Tile batches: {len(self.delegate.batched_bboxes)}", + f"Global batch size: {self.delegate.global_tile_bs}", + f"Global batches: {len(self.delegate.global_batched_bboxes)}", + ]) + + print(info) + + noise = p.rng.next() + if hasattr(p,'initial_noise_multiplier'): + if p.initial_noise_multiplier != 1.0: + p.extra_generation_params["Noise multiplier"] = p.initial_noise_multiplier + noise *= p.initial_noise_multiplier + else: + p.image_conditioning = p.txt2img_image_conditioning(noise) + + p.noise = noise + p.x = p.latents.clone() + p.current_step=0 + + p.latents = p.sampler.sample_img2img(p,p.latents, noise , conditioning, unconditional_conditioning, image_conditioning=p.image_conditioning) + if self.flag_noise_inverse: + self.delegate.sampler_raw.sample_img2img = self.delegate.sample_img2img_original + self.flag_noise_inverse = False + + p.latents = (p.latents - p.latents.mean()) / p.latents.std() * anchor_std + anchor_mean + latents_ = F.pad(p.latents, (0, p.latents.shape[3]//current_scale_num*(p.scale_factor-current_scale_num), 0, p.latents.shape[2]//current_scale_num*(p.scale_factor-current_scale_num))) + if current_scale_num==1: + res = latents_ + else: + res = torch.concatenate((res,latents_),axis=0) + + ######################################################################################################################################### + + return res + + @staticmethod + def callback_hijack(self_sampler,d,p): + p.current_step = d['i'] + + if self_sampler.stop_at is not None and p.current_step > self_sampler.stop_at: + raise InterruptedException + + state.sampling_step = p.current_step + shared.total_tqdm.update() + p.current_step += 1 + + + def create_sampler_hijack( + self, name: str, model: LatentDiffusion, p: Processing, method: Method_2, control_tensor_cpu:bool,window_size, noise_inverse: bool, noise_inverse_steps: int, noise_inverse_retouch:float, + noise_inverse_renoise_strength: float, noise_inverse_renoise_kernel: int, overlap:int, tile_batch_size:int, random_jitter:bool,batch_size_g:int + ): + if self.delegate is not None: + # samplers are stateless, we reuse it if possible + if self.delegate.sampler_name == name: + # before we reuse the sampler, we refresh the control tensor + # so that we are compatible with ControlNet batch processing + if self.controlnet_script: + self.delegate.prepare_controlnet_tensors(refresh=True) + return self.delegate.sampler_raw + else: + self.reset() + sd_samplers_common.Sampler.callback_ori = sd_samplers_common.Sampler.callback_state + sd_samplers_common.Sampler.callback_state = lambda self_sampler,d:Script.callback_hijack(self_sampler,d,p) + + self.flag_noise_inverse = hasattr(p, "init_images") and len(p.init_images) > 0 and noise_inverse + flag_noise_inverse = self.flag_noise_inverse + if flag_noise_inverse: + print('warn: noise inversion only supports the "Euler" sampler, switch to it sliently...') + name = 'Euler' + p.sampler_name = 'Euler' + if name is None: print('>> name is empty') + if model is None: print('>> model is empty') + sampler = Script.create_sampler_original_md(name, model) + if method ==Method_2.DEMO_FU: delegate_cls = DemoFusion + else: raise NotImplementedError(f"Method {method} not implemented.") + + delegate = delegate_cls(p, sampler) + delegate.window_size = min(min(window_size,p.width//8),p.height//8) + p.random_jitter = random_jitter + + if flag_noise_inverse: + get_cache_callback = self.noise_inverse_get_cache + set_cache_callback = lambda x0, xt, prompts: self.noise_inverse_set_cache(p, x0, xt, prompts, noise_inverse_steps, noise_inverse_retouch) + delegate.init_noise_inverse(noise_inverse_steps, noise_inverse_retouch, get_cache_callback, set_cache_callback, noise_inverse_renoise_strength, noise_inverse_renoise_kernel) + + # delegate.get_views(overlap,tile_batch_size,batch_size_g) + if self.controlnet_script: + delegate.init_controlnet(self.controlnet_script, control_tensor_cpu) + if self.stablesr_script: + delegate.init_stablesr(self.stablesr_script) + + # init everything done, perform sanity check & pre-computations + # hijack the behaviours + delegate.hook() + + self.delegate = delegate + + exts = [ + "ContrlNet" if self.controlnet_script else None, + "StableSR" if self.stablesr_script else None, + ] + ext_info = ', '.join([e for e in exts if e]) + if ext_info: ext_info = f' (ext: {ext_info})' + print(ext_info) + + return delegate.sampler_raw + + def create_random_tensors_hijack( + self, bbox_settings: Dict, region_info: Dict, + shape, seeds, subseeds=None, subseed_strength=0.0, seed_resize_from_h=0, seed_resize_from_w=0, p=None, + ): + org_random_tensors = Script.create_random_tensors_original_md(shape, seeds, subseeds, subseed_strength, seed_resize_from_h, seed_resize_from_w, p) + height, width = shape[1], shape[2] + background_noise = torch.zeros_like(org_random_tensors) + background_noise_count = torch.zeros((1, 1, height, width), device=org_random_tensors.device) + foreground_noise = torch.zeros_like(org_random_tensors) + foreground_noise_count = torch.zeros((1, 1, height, width), device=org_random_tensors.device) + + for i, v in bbox_settings.items(): + seed = get_fixed_seed(v.seed) + x, y, w, h = v.x, v.y, v.w, v.h + # convert to pixel + x = int(x * width) + y = int(y * height) + w = math.ceil(w * width) + h = math.ceil(h * height) + # clamp + x = max(0, x) + y = max(0, y) + w = min(width - x, w) + h = min(height - y, h) + # create random tensor + torch.manual_seed(seed) + rand_tensor = torch.randn((1, org_random_tensors.shape[1], h, w), device=devices.cpu) + if BlendMode(v.blend_mode) == BlendMode.BACKGROUND: + background_noise [:, :, y:y+h, x:x+w] += rand_tensor.to(background_noise.device) + background_noise_count[:, :, y:y+h, x:x+w] += 1 + elif BlendMode(v.blend_mode) == BlendMode.FOREGROUND: + foreground_noise [:, :, y:y+h, x:x+w] += rand_tensor.to(foreground_noise.device) + foreground_noise_count[:, :, y:y+h, x:x+w] += 1 + else: + raise NotImplementedError + region_info['Region ' + str(i+1)]['seed'] = seed + + # average + background_noise = torch.where(background_noise_count > 1, background_noise / background_noise_count, background_noise) + foreground_noise = torch.where(foreground_noise_count > 1, foreground_noise / foreground_noise_count, foreground_noise) + # paste two layers to original random tensor + org_random_tensors = torch.where(background_noise_count > 0, background_noise, org_random_tensors) + org_random_tensors = torch.where(foreground_noise_count > 0, foreground_noise, org_random_tensors) + return org_random_tensors + + ''' ↓↓↓ helper methods ↓↓↓ ''' + + def dump_regions(self, cfg_name, *bbox_controls): + if not cfg_name: return gr_value(f'Config file name cannot be empty.', visible=True) + + bbox_settings = build_bbox_settings(bbox_controls) + data = {'bbox_controls': [v._asdict() for v in bbox_settings.values()]} + + if not os.path.exists(CFG_PATH): os.makedirs(CFG_PATH) + fp = os.path.join(CFG_PATH, cfg_name) + with open(fp, 'w', encoding='utf-8') as fh: + json.dump(data, fh, indent=2, ensure_ascii=False) + + return gr_value(f'Config saved to {fp}.', visible=True) + + def load_regions(self, ref_image, cfg_name, *bbox_controls): + if ref_image is None: + return [gr_value(v) for v in bbox_controls] + [gr_value(f'Please create or upload a ref image first.', visible=True)] + fp = os.path.join(CFG_PATH, cfg_name) + if not os.path.exists(fp): + return [gr_value(v) for v in bbox_controls] + [gr_value(f'Config {fp} not found.', visible=True)] + + try: + with open(fp, 'r', encoding='utf-8') as fh: + data = json.load(fh) + except Exception as e: + return [gr_value(v) for v in bbox_controls] + [gr_value(f'Failed to load config {fp}: {e}', visible=True)] + + num_boxes = len(data['bbox_controls']) + data_list = [] + for i in range(BBOX_MAX_NUM): + if i < num_boxes: + for k in BBoxSettings._fields: + if k in data['bbox_controls'][i]: + data_list.append(data['bbox_controls'][i][k]) + else: + data_list.append(None) + else: + data_list.extend(DEFAULT_BBOX_SETTINGS) + + return [gr_value(v) for v in data_list] + [gr_value(f'Config loaded from {fp}.', visible=True)] + + + def noise_inverse_set_cache(self, p: ProcessingImg2Img, x0: Tensor, xt: Tensor, prompts: List[str], steps: int, retouch:float): + self.noise_inverse_cache = NoiseInverseCache(p.sd_model.sd_model_hash, x0, xt, steps, retouch, prompts) + + def noise_inverse_get_cache(self): + return self.noise_inverse_cache + + + def reset(self): + ''' unhijack inner APIs, see hijack in process() ''' + if hasattr(Script, "create_sampler_original_md"): + sd_samplers.create_sampler = Script.create_sampler_original_md + del Script.create_sampler_original_md + if hasattr(Script, "create_random_tensors_original_md"): + processing.create_random_tensors = Script.create_random_tensors_original_md + del Script.create_random_tensors_original_md + if hasattr(sd_samplers_common.Sampler, "callback_ori"): + sd_samplers_common.Sampler.callback_state = sd_samplers_common.Sampler.callback_ori + del sd_samplers_common.Sampler.callback_ori + if hasattr(processing, "create_infotext_ori"): + processing.create_infotext = processing.create_infotext_ori + del processing.create_infotext_ori + DemoFusion.unhook() + self.delegate = None + + def reset_and_gc(self): + self.reset() + self.noise_inverse_cache = None + + import gc; gc.collect() + devices.torch_gc() + + try: + import os + import psutil + mem = psutil.Process(os.getpid()).memory_info() + print(f'[Mem] rss: {mem.rss/2**30:.3f} GB, vms: {mem.vms/2**30:.3f} GB') + from modules.shared import mem_mon as vram_mon + from modules.memmon import MemUsageMonitor + vram_mon: MemUsageMonitor + free, total = vram_mon.cuda_mem_get_info() + print(f'[VRAM] free: {free/2**30:.3f} GB, total: {total/2**30:.3f} GB') + except: + pass diff --git a/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/scripts/tilevae.py b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/scripts/tilevae.py new file mode 100644 index 0000000000000000000000000000000000000000..5f4ed4a2e3b0e0213911cb8d289fb2d36d974d9c --- /dev/null +++ b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/scripts/tilevae.py @@ -0,0 +1,758 @@ +''' +# ------------------------------------------------------------------------ +# +# Tiled VAE +# +# Introducing a revolutionary new optimization designed to make +# the VAE work with giant images on limited VRAM! +# Say goodbye to the frustration of OOM and hello to seamless output! +# +# ------------------------------------------------------------------------ +# +# This script is a wild hack that splits the image into tiles, +# encodes each tile separately, and merges the result back together. +# +# Advantages: +# - The VAE can now work with giant images on limited VRAM +# (~10 GB for 8K images!) +# - The merged output is completely seamless without any post-processing. +# +# Drawbacks: +# - NaNs always appear in for 8k images when you use fp16 (half) VAE +# You must use --no-half-vae to disable half VAE for that giant image. +# - The gradient calculation is not compatible with this hack. It +# will break any backward() or torch.autograd.grad() that passes VAE. +# (But you can still use the VAE to generate training data.) +# +# How it works: +# 1. The image is split into tiles, which are then padded with 11/32 pixels' in the decoder/encoder. +# 2. When Fast Mode is disabled: +# 1. The original VAE forward is decomposed into a task queue and a task worker, which starts to process each tile. +# 2. When GroupNorm is needed, it suspends, stores current GroupNorm mean and var, send everything to RAM, and turns to the next tile. +# 3. After all GroupNorm means and vars are summarized, it applies group norm to tiles and continues. +# 4. A zigzag execution order is used to reduce unnecessary data transfer. +# 3. When Fast Mode is enabled: +# 1. The original input is downsampled and passed to a separate task queue. +# 2. Its group norm parameters are recorded and used by all tiles' task queues. +# 3. Each tile is separately processed without any RAM-VRAM data transfer. +# 4. After all tiles are processed, tiles are written to a result buffer and returned. +# Encoder color fix = only estimate GroupNorm before downsampling, i.e., run in a semi-fast mode. +# +# Enjoy! +# +# @Author: LI YI @ Nanyang Technological University - Singapore +# @Date: 2023-03-02 +# @License: CC BY-NC-SA 4.0 +# +# Please give me a star if you like this project! +# +# ------------------------------------------------------------------------- +''' + +import gc +import math +from time import time +from tqdm import tqdm + +import torch +import torch.version +import torch.nn.functional as F +import gradio as gr + +import modules.scripts as scripts +import modules.devices as devices +from modules.shared import state, opts +from modules.ui import gr_show +from modules.processing import opt_f +from modules.sd_vae_approx import cheap_approximation +from ldm.modules.diffusionmodules.model import AttnBlock, MemoryEfficientAttnBlock + +from tile_utils.attn import get_attn_func +from tile_utils.typing import Processing + +if hasattr(opts, 'hypertile_enable_unet'): # webui >= 1.7 + from modules.ui_components import InputAccordion +else: + InputAccordion = None + + +def get_rcmd_enc_tsize(): + if torch.cuda.is_available() and devices.device not in ['cpu', devices.cpu]: + total_memory = torch.cuda.get_device_properties(devices.device).total_memory // 2**20 + if total_memory > 16*1000: ENCODER_TILE_SIZE = 3072 + elif total_memory > 12*1000: ENCODER_TILE_SIZE = 2048 + elif total_memory > 8*1000: ENCODER_TILE_SIZE = 1536 + else: ENCODER_TILE_SIZE = 960 + else: ENCODER_TILE_SIZE = 512 + return ENCODER_TILE_SIZE + + +def get_rcmd_dec_tsize(): + if torch.cuda.is_available() and devices.device not in ['cpu', devices.cpu]: + total_memory = torch.cuda.get_device_properties(devices.device).total_memory // 2**20 + if total_memory > 30*1000: DECODER_TILE_SIZE = 256 + elif total_memory > 16*1000: DECODER_TILE_SIZE = 192 + elif total_memory > 12*1000: DECODER_TILE_SIZE = 128 + elif total_memory > 8*1000: DECODER_TILE_SIZE = 96 + else: DECODER_TILE_SIZE = 64 + else: DECODER_TILE_SIZE = 64 + return DECODER_TILE_SIZE + + +def inplace_nonlinearity(x): + # Test: fix for Nans + return F.silu(x, inplace=True) + + +def attn2task(task_queue, net): + attn_forward = get_attn_func() + task_queue.append(('store_res', lambda x: x)) + task_queue.append(('pre_norm', net.norm)) + task_queue.append(('attn', lambda x, net=net: attn_forward(net, x))) + task_queue.append(['add_res', None]) + + +def resblock2task(queue, block): + """ + Turn a ResNetBlock into a sequence of tasks and append to the task queue + + @param queue: the target task queue + @param block: ResNetBlock + + """ + if block.in_channels != block.out_channels: + if block.use_conv_shortcut: + queue.append(('store_res', block.conv_shortcut)) + else: + queue.append(('store_res', block.nin_shortcut)) + else: + queue.append(('store_res', lambda x: x)) + queue.append(('pre_norm', block.norm1)) + queue.append(('silu', inplace_nonlinearity)) + queue.append(('conv1', block.conv1)) + queue.append(('pre_norm', block.norm2)) + queue.append(('silu', inplace_nonlinearity)) + queue.append(('conv2', block.conv2)) + queue.append(['add_res', None]) + + +def build_sampling(task_queue, net, is_decoder): + """ + Build the sampling part of a task queue + @param task_queue: the target task queue + @param net: the network + @param is_decoder: currently building decoder or encoder + """ + if is_decoder: + resblock2task(task_queue, net.mid.block_1) + attn2task(task_queue, net.mid.attn_1) + resblock2task(task_queue, net.mid.block_2) + resolution_iter = reversed(range(net.num_resolutions)) + block_ids = net.num_res_blocks + 1 + condition = 0 + module = net.up + func_name = 'upsample' + else: + resolution_iter = range(net.num_resolutions) + block_ids = net.num_res_blocks + condition = net.num_resolutions - 1 + module = net.down + func_name = 'downsample' + + for i_level in resolution_iter: + for i_block in range(block_ids): + resblock2task(task_queue, module[i_level].block[i_block]) + if i_level != condition: + task_queue.append((func_name, getattr(module[i_level], func_name))) + + if not is_decoder: + resblock2task(task_queue, net.mid.block_1) + attn2task(task_queue, net.mid.attn_1) + resblock2task(task_queue, net.mid.block_2) + + +def build_task_queue(net, is_decoder): + """ + Build a single task queue for the encoder or decoder + @param net: the VAE decoder or encoder network + @param is_decoder: currently building decoder or encoder + @return: the task queue + """ + task_queue = [] + task_queue.append(('conv_in', net.conv_in)) + + # construct the sampling part of the task queue + # because encoder and decoder share the same architecture, we extract the sampling part + build_sampling(task_queue, net, is_decoder) + + if not is_decoder or not net.give_pre_end: + task_queue.append(('pre_norm', net.norm_out)) + task_queue.append(('silu', inplace_nonlinearity)) + task_queue.append(('conv_out', net.conv_out)) + if is_decoder and net.tanh_out: + task_queue.append(('tanh', torch.tanh)) + + return task_queue + + +def clone_task_queue(task_queue): + """ + Clone a task queue + @param task_queue: the task queue to be cloned + @return: the cloned task queue + """ + return [[item for item in task] for task in task_queue] + + +def get_var_mean(input, num_groups, eps=1e-6): + """ + Get mean and var for group norm + """ + b, c = input.size(0), input.size(1) + channel_in_group = int(c/num_groups) + input_reshaped = input.contiguous().view(1, int(b * num_groups), channel_in_group, *input.size()[2:]) + var, mean = torch.var_mean(input_reshaped, dim=[0, 2, 3, 4], unbiased=False) + return var, mean + + +def custom_group_norm(input, num_groups, mean, var, weight=None, bias=None, eps=1e-6): + """ + Custom group norm with fixed mean and var + + @param input: input tensor + @param num_groups: number of groups. by default, num_groups = 32 + @param mean: mean, must be pre-calculated by get_var_mean + @param var: var, must be pre-calculated by get_var_mean + @param weight: weight, should be fetched from the original group norm + @param bias: bias, should be fetched from the original group norm + @param eps: epsilon, by default, eps = 1e-6 to match the original group norm + + @return: normalized tensor + """ + b, c = input.size(0), input.size(1) + channel_in_group = int(c/num_groups) + input_reshaped = input.contiguous().view( + 1, int(b * num_groups), channel_in_group, *input.size()[2:]) + + out = F.batch_norm(input_reshaped, mean.to(input), var.to(input), weight=None, bias=None, training=False, momentum=0, eps=eps) + out = out.view(b, c, *input.size()[2:]) + + # post affine transform + if weight is not None: + out *= weight.view(1, -1, 1, 1) + if bias is not None: + out += bias.view(1, -1, 1, 1) + return out + + +def crop_valid_region(x, input_bbox, target_bbox, is_decoder): + """ + Crop the valid region from the tile + @param x: input tile + @param input_bbox: original input bounding box + @param target_bbox: output bounding box + @param scale: scale factor + @return: cropped tile + """ + padded_bbox = [i * 8 if is_decoder else i//8 for i in input_bbox] + margin = [target_bbox[i] - padded_bbox[i] for i in range(4)] + return x[:, :, margin[2]:x.size(2)+margin[3], margin[0]:x.size(3)+margin[1]] + + +# ↓↓↓ https://github.com/Kahsolt/stable-diffusion-webui-vae-tile-infer ↓↓↓ + +def perfcount(fn): + def wrapper(*args, **kwargs): + ts = time() + + if torch.cuda.is_available(): + torch.cuda.reset_peak_memory_stats(devices.device) + devices.torch_gc() + gc.collect() + + ret = fn(*args, **kwargs) + + devices.torch_gc() + gc.collect() + if torch.cuda.is_available(): + vram = torch.cuda.max_memory_allocated(devices.device) / 2**20 + print(f'[Tiled VAE]: Done in {time() - ts:.3f}s, max VRAM alloc {vram:.3f} MB') + else: + print(f'[Tiled VAE]: Done in {time() - ts:.3f}s') + + return ret + return wrapper + +# ↑↑↑ https://github.com/Kahsolt/stable-diffusion-webui-vae-tile-infer ↑↑↑ + + +class GroupNormParam: + + def __init__(self): + self.var_list = [] + self.mean_list = [] + self.pixel_list = [] + self.weight = None + self.bias = None + + def add_tile(self, tile, layer): + var, mean = get_var_mean(tile, 32) + # For giant images, the variance can be larger than max float16 + # In this case we create a copy to float32 + if var.dtype == torch.float16 and var.isinf().any(): + fp32_tile = tile.float() + var, mean = get_var_mean(fp32_tile, 32) + # ============= DEBUG: test for infinite ============= + # if torch.isinf(var).any(): + # print('var: ', var) + # ==================================================== + self.var_list.append(var) + self.mean_list.append(mean) + self.pixel_list.append( + tile.shape[2]*tile.shape[3]) + if hasattr(layer, 'weight'): + self.weight = layer.weight + self.bias = layer.bias + else: + self.weight = None + self.bias = None + + def summary(self): + """ + summarize the mean and var and return a function + that apply group norm on each tile + """ + if len(self.var_list) == 0: return None + + var = torch.vstack(self.var_list) + mean = torch.vstack(self.mean_list) + max_value = max(self.pixel_list) + pixels = torch.tensor(self.pixel_list, dtype=torch.float32, device=devices.device) / max_value + sum_pixels = torch.sum(pixels) + pixels = pixels.unsqueeze(1) / sum_pixels + var = torch.sum(var * pixels, dim=0) + mean = torch.sum(mean * pixels, dim=0) + return lambda x: custom_group_norm(x, 32, mean, var, self.weight, self.bias) + + @staticmethod + def from_tile(tile, norm): + """ + create a function from a single tile without summary + """ + var, mean = get_var_mean(tile, 32) + if var.dtype == torch.float16 and var.isinf().any(): + fp32_tile = tile.float() + var, mean = get_var_mean(fp32_tile, 32) + # if it is a macbook, we need to convert back to float16 + if var.device.type == 'mps': + # clamp to avoid overflow + var = torch.clamp(var, 0, 60000) + var = var.half() + mean = mean.half() + if hasattr(norm, 'weight'): + weight = norm.weight + bias = norm.bias + else: + weight = None + bias = None + + def group_norm_func(x, mean=mean, var=var, weight=weight, bias=bias): + return custom_group_norm(x, 32, mean, var, weight, bias, 1e-6) + return group_norm_func + + +class VAEHook: + + def __init__(self, net, tile_size, is_decoder:bool, fast_decoder:bool, fast_encoder:bool, color_fix:bool, to_gpu:bool=False): + self.net = net # encoder | decoder + self.tile_size = tile_size + self.is_decoder = is_decoder + self.fast_mode = (fast_encoder and not is_decoder) or (fast_decoder and is_decoder) + self.color_fix = color_fix and not is_decoder + self.to_gpu = to_gpu + self.pad = 11 if is_decoder else 32 # FIXME: magic number + + def __call__(self, x): + original_device = next(self.net.parameters()).device + try: + if self.to_gpu: + self.net = self.net.to(devices.get_optimal_device()) + + B, C, H, W = x.shape + if max(H, W) <= self.pad * 2 + self.tile_size: + print("[Tiled VAE]: the input size is tiny and unnecessary to tile.") + return self.net.original_forward(x) + else: + return self.vae_tile_forward(x) + finally: + self.net = self.net.to(original_device) + + def get_best_tile_size(self, lowerbound, upperbound): + """ + Get the best tile size for GPU memory + """ + divider = 32 + while divider >= 2: + remainer = lowerbound % divider + if remainer == 0: + return lowerbound + candidate = lowerbound - remainer + divider + if candidate <= upperbound: + return candidate + divider //= 2 + return lowerbound + + def split_tiles(self, h, w): + """ + Tool function to split the image into tiles + @param h: height of the image + @param w: width of the image + @return: tile_input_bboxes, tile_output_bboxes + """ + tile_input_bboxes, tile_output_bboxes = [], [] + tile_size = self.tile_size + pad = self.pad + num_height_tiles = math.ceil((h - 2 * pad) / tile_size) + num_width_tiles = math.ceil((w - 2 * pad) / tile_size) + # If any of the numbers are 0, we let it be 1 + # This is to deal with long and thin images + num_height_tiles = max(num_height_tiles, 1) + num_width_tiles = max(num_width_tiles, 1) + + # Suggestions from https://github.com/Kahsolt: auto shrink the tile size + real_tile_height = math.ceil((h - 2 * pad) / num_height_tiles) + real_tile_width = math.ceil((w - 2 * pad) / num_width_tiles) + real_tile_height = self.get_best_tile_size(real_tile_height, tile_size) + real_tile_width = self.get_best_tile_size(real_tile_width, tile_size) + + print(f'[Tiled VAE]: split to {num_height_tiles}x{num_width_tiles} = {num_height_tiles*num_width_tiles} tiles. ' + + f'Optimal tile size {real_tile_width}x{real_tile_height}, original tile size {tile_size}x{tile_size}') + + for i in range(num_height_tiles): + for j in range(num_width_tiles): + # bbox: [x1, x2, y1, y2] + # the padding is is unnessary for image borders. So we directly start from (32, 32) + input_bbox = [ + pad + j * real_tile_width, + min(pad + (j + 1) * real_tile_width, w), + pad + i * real_tile_height, + min(pad + (i + 1) * real_tile_height, h), + ] + + # if the output bbox is close to the image boundary, we extend it to the image boundary + output_bbox = [ + input_bbox[0] if input_bbox[0] > pad else 0, + input_bbox[1] if input_bbox[1] < w - pad else w, + input_bbox[2] if input_bbox[2] > pad else 0, + input_bbox[3] if input_bbox[3] < h - pad else h, + ] + + # scale to get the final output bbox + output_bbox = [x * 8 if self.is_decoder else x // 8 for x in output_bbox] + tile_output_bboxes.append(output_bbox) + + # indistinguishable expand the input bbox by pad pixels + tile_input_bboxes.append([ + max(0, input_bbox[0] - pad), + min(w, input_bbox[1] + pad), + max(0, input_bbox[2] - pad), + min(h, input_bbox[3] + pad), + ]) + + return tile_input_bboxes, tile_output_bboxes + + @torch.no_grad() + def estimate_group_norm(self, z, task_queue, color_fix): + device = z.device + tile = z + last_id = len(task_queue) - 1 + while last_id >= 0 and task_queue[last_id][0] != 'pre_norm': + last_id -= 1 + if last_id <= 0 or task_queue[last_id][0] != 'pre_norm': + raise ValueError('No group norm found in the task queue') + # estimate until the last group norm + for i in range(last_id + 1): + task = task_queue[i] + if task[0] == 'pre_norm': + group_norm_func = GroupNormParam.from_tile(tile, task[1]) + task_queue[i] = ('apply_norm', group_norm_func) + if i == last_id: + return True + tile = group_norm_func(tile) + elif task[0] == 'store_res': + task_id = i + 1 + while task_id < last_id and task_queue[task_id][0] != 'add_res': + task_id += 1 + if task_id >= last_id: + continue + task_queue[task_id][1] = task[1](tile) + elif task[0] == 'add_res': + tile += task[1].to(device) + task[1] = None + elif color_fix and task[0] == 'downsample': + for j in range(i, last_id + 1): + if task_queue[j][0] == 'store_res': + task_queue[j] = ('store_res_cpu', task_queue[j][1]) + return True + else: + tile = task[1](tile) + try: + devices.test_for_nans(tile, "vae") + except: + print(f'Nan detected in fast mode estimation. Fast mode disabled.') + return False + + raise IndexError('Should not reach here') + + @perfcount + @torch.no_grad() + def vae_tile_forward(self, z): + """ + Decode a latent vector z into an image in a tiled manner. + @param z: latent vector + @return: image + """ + device = next(self.net.parameters()).device + dtype = next(self.net.parameters()).dtype + net = self.net + tile_size = self.tile_size + is_decoder = self.is_decoder + + z = z.detach() # detach the input to avoid backprop + + N, height, width = z.shape[0], z.shape[2], z.shape[3] + net.last_z_shape = z.shape + + # Split the input into tiles and build a task queue for each tile + print(f'[Tiled VAE]: input_size: {z.shape}, tile_size: {tile_size}, padding: {self.pad}') + + in_bboxes, out_bboxes = self.split_tiles(height, width) + + # Prepare tiles by split the input latents + tiles = [] + for input_bbox in in_bboxes: + tile = z[:, :, input_bbox[2]:input_bbox[3], input_bbox[0]:input_bbox[1]].cpu() + tiles.append(tile) + + num_tiles = len(tiles) + num_completed = 0 + + # Build task queues + single_task_queue = build_task_queue(net, is_decoder) + if self.fast_mode: + # Fast mode: downsample the input image to the tile size, + # then estimate the group norm parameters on the downsampled image + scale_factor = tile_size / max(height, width) + z = z.to(device) + downsampled_z = F.interpolate(z, scale_factor=scale_factor, mode='nearest-exact') + # use nearest-exact to keep statictics as close as possible + print(f'[Tiled VAE]: Fast mode enabled, estimating group norm parameters on {downsampled_z.shape[3]} x {downsampled_z.shape[2]} image') + + # ======= Special thanks to @Kahsolt for distribution shift issue ======= # + # The downsampling will heavily distort its mean and std, so we need to recover it. + std_old, mean_old = torch.std_mean(z, dim=[0, 2, 3], keepdim=True) + std_new, mean_new = torch.std_mean(downsampled_z, dim=[0, 2, 3], keepdim=True) + downsampled_z = (downsampled_z - mean_new) / std_new * std_old + mean_old + del std_old, mean_old, std_new, mean_new + # occasionally the std_new is too small or too large, which exceeds the range of float16 + # so we need to clamp it to max z's range. + downsampled_z = torch.clamp_(downsampled_z, min=z.min(), max=z.max()) + estimate_task_queue = clone_task_queue(single_task_queue) + if self.estimate_group_norm(downsampled_z, estimate_task_queue, color_fix=self.color_fix): + single_task_queue = estimate_task_queue + del downsampled_z + + task_queues = [clone_task_queue(single_task_queue) for _ in range(num_tiles)] + + # Dummy result + result = None + result_approx = None + try: + with devices.autocast(): + result_approx = torch.cat([F.interpolate(cheap_approximation(x).unsqueeze(0), scale_factor=opt_f, mode='nearest-exact') for x in z], dim=0).cpu() + except: pass + # Free memory of input latent tensor + del z + + # Task queue execution + pbar = tqdm(total=num_tiles * len(task_queues[0]), desc=f"[Tiled VAE]: Executing {'Decoder' if is_decoder else 'Encoder'} Task Queue: ") + + # execute the task back and forth when switch tiles so that we always + # keep one tile on the GPU to reduce unnecessary data transfer + forward = True + interrupted = False + #state.interrupted = interrupted + while True: + if state.interrupted: interrupted = True ; break + + group_norm_param = GroupNormParam() + for i in range(num_tiles) if forward else reversed(range(num_tiles)): + if state.interrupted: interrupted = True ; break + + tile = tiles[i].to(device) + input_bbox = in_bboxes[i] + task_queue = task_queues[i] + + interrupted = False + while len(task_queue) > 0: + if state.interrupted: interrupted = True ; break + + # DEBUG: current task + # print('Running task: ', task_queue[0][0], ' on tile ', i, '/', num_tiles, ' with shape ', tile.shape) + task = task_queue.pop(0) + if task[0] == 'pre_norm': + group_norm_param.add_tile(tile, task[1]) + break + elif task[0] == 'store_res' or task[0] == 'store_res_cpu': + task_id = 0 + res = task[1](tile) + if not self.fast_mode or task[0] == 'store_res_cpu': + res = res.cpu() + while task_queue[task_id][0] != 'add_res': + task_id += 1 + task_queue[task_id][1] = res + elif task[0] == 'add_res': + tile += task[1].to(device) + task[1] = None + else: + tile = task[1](tile) + pbar.update(1) + + if interrupted: break + + # check for NaNs in the tile. + # If there are NaNs, we abort the process to save user's time + devices.test_for_nans(tile, "vae") + + if len(task_queue) == 0: + tiles[i] = None + num_completed += 1 + if result is None: # NOTE: dim C varies from different cases, can only be inited dynamically + result = torch.zeros((N, tile.shape[1], height * 8 if is_decoder else height // 8, width * 8 if is_decoder else width // 8), device=device, requires_grad=False) + result[:, :, out_bboxes[i][2]:out_bboxes[i][3], out_bboxes[i][0]:out_bboxes[i][1]] = crop_valid_region(tile, in_bboxes[i], out_bboxes[i], is_decoder) + del tile + elif i == num_tiles - 1 and forward: + forward = False + tiles[i] = tile + elif i == 0 and not forward: + forward = True + tiles[i] = tile + else: + tiles[i] = tile.cpu() + del tile + + if interrupted: break + if num_completed == num_tiles: break + + # insert the group norm task to the head of each task queue + group_norm_func = group_norm_param.summary() + if group_norm_func is not None: + for i in range(num_tiles): + task_queue = task_queues[i] + task_queue.insert(0, ('apply_norm', group_norm_func)) + + # Done! + pbar.close() + return result.to(dtype) if result is not None else result_approx.to(device, dtype=dtype) + + +class Script(scripts.Script): + + def __init__(self): + self.hooked = False + + def title(self): + return "Tiled VAE" + + def show(self, is_img2img): + return scripts.AlwaysVisible + + def ui(self, is_img2img): + tab = 't2i' if not is_img2img else 'i2i' + uid = lambda name: f'MD-{tab}-{name}' + + with ( + InputAccordion(False, label='Tiled VAE', elem_id=f'MDV-{tab}-enabled') if InputAccordion + else gr.Accordion('Tiled VAE', open=False, elem_id=f'MDV-{tab}') + as enabled + ): + with gr.Row() as tab_enable: + if not InputAccordion: + enabled = gr.Checkbox(label='Enable Tiled VAE', value=False, elem_id=uid('enable')) + vae_to_gpu = gr.Checkbox(label='Move VAE to GPU (if possible)', value=True, elem_id=uid('vae2gpu')) + + gr.HTML('Recommended to set tile sizes as large as possible before got CUDA error: out of memory.
') + with gr.Row() as tab_size: + encoder_tile_size = gr.Slider(label='Encoder Tile Size', minimum=256, maximum=4096, step=16, value=get_rcmd_enc_tsize(), elem_id=uid('enc-size')) + decoder_tile_size = gr.Slider(label='Decoder Tile Size', minimum=48, maximum=512, step=16, value=get_rcmd_dec_tsize(), elem_id=uid('dec-size')) + reset = gr.Button(value='↻ Reset', variant='tool') + reset.click(fn=lambda: [get_rcmd_enc_tsize(), get_rcmd_dec_tsize()], outputs=[encoder_tile_size, decoder_tile_size], show_progress=False) + + with gr.Row() as tab_param: + fast_encoder = gr.Checkbox(label='Fast Encoder', value=True, elem_id=uid('fastenc')) + color_fix = gr.Checkbox(label='Fast Encoder Color Fix', value=False, visible=True, elem_id=uid('fastenc-colorfix')) + fast_decoder = gr.Checkbox(label='Fast Decoder', value=True, elem_id=uid('fastdec')) + + fast_encoder.change(fn=gr_show, inputs=fast_encoder, outputs=color_fix, show_progress=False) + + return [ + enabled, + encoder_tile_size, decoder_tile_size, + vae_to_gpu, fast_decoder, fast_encoder, color_fix, + ] + + def process(self, p:Processing, + enabled:bool, + encoder_tile_size:int, decoder_tile_size:int, + vae_to_gpu:bool, fast_decoder:bool, fast_encoder:bool, color_fix:bool + ): + + # for shorthand + vae = p.sd_model.first_stage_model + encoder = vae.encoder + decoder = vae.decoder + + # undo hijack if disabled (in cases last time crashed) + if not enabled: + if self.hooked: + if isinstance(encoder.forward, VAEHook): + encoder.forward.net = None + encoder.forward = encoder.original_forward + if isinstance(decoder.forward, VAEHook): + decoder.forward.net = None + decoder.forward = decoder.original_forward + self.hooked = False + return + + if devices.get_optimal_device_name().startswith('cuda') and vae.device == devices.cpu and not vae_to_gpu: + print("[Tiled VAE] warn: VAE is not on GPU, check 'Move VAE to GPU' if possible.") + + # do hijack + kwargs = { + 'fast_decoder': fast_decoder, + 'fast_encoder': fast_encoder, + 'color_fix': color_fix, + 'to_gpu': vae_to_gpu, + } + + # save original forward (only once) + if not hasattr(encoder, 'original_forward'): setattr(encoder, 'original_forward', encoder.forward) + if not hasattr(decoder, 'original_forward'): setattr(decoder, 'original_forward', decoder.forward) + + self.hooked = True + + encoder.forward = VAEHook(encoder, encoder_tile_size, is_decoder=False, **kwargs) + decoder.forward = VAEHook(decoder, decoder_tile_size, is_decoder=True, **kwargs) + + def postprocess(self, p:Processing, processed, enabled:bool, *args): + if not enabled: return + + vae = p.sd_model.first_stage_model + encoder = vae.encoder + decoder = vae.decoder + if isinstance(encoder.forward, VAEHook): + encoder.forward.net = None + encoder.forward = encoder.original_forward + if isinstance(decoder.forward, VAEHook): + decoder.forward.net = None + decoder.forward = decoder.original_forward diff --git a/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/abstractdiffusion.cpython-310.pyc b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/abstractdiffusion.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..a8c2c8df35d3835feae2abbc545eb35b96d85b04 Binary files /dev/null and b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/abstractdiffusion.cpython-310.pyc differ diff --git a/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/demofusion.cpython-310.pyc b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/demofusion.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..888412ca6acb9ab5fc12845cf96b4bc9ad682f33 Binary files /dev/null and b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/demofusion.cpython-310.pyc differ diff --git a/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/mixtureofdiffusers.cpython-310.pyc b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/mixtureofdiffusers.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..d87d14e5afdcfec86f7aeb26e7e0d64a44602e31 Binary files /dev/null and b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/mixtureofdiffusers.cpython-310.pyc differ diff --git a/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/multidiffusion.cpython-310.pyc b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/multidiffusion.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..df9e59715f9a03a73815275ee019edf53cfcac92 Binary files /dev/null and b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/multidiffusion.cpython-310.pyc differ diff --git a/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/abstractdiffusion.py b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/abstractdiffusion.py new file mode 100644 index 0000000000000000000000000000000000000000..88916f3881479355d6ac0ab0425836a09255e126 --- /dev/null +++ b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/abstractdiffusion.py @@ -0,0 +1,747 @@ +from tile_utils.utils import * + + +class AbstractDiffusion: + + def __init__(self, p: Processing, sampler: Sampler): + self.method = self.__class__.__name__ + self.p: Processing = p + self.pbar = None + + # sampler + self.sampler_name = p.sampler_name + self.sampler_raw = sampler + self.sampler = sampler + + # fix. Kdiff 'AND' support and image editing model support + if self.is_kdiff and not hasattr(self, 'is_edit_model'): + self.is_edit_model = (shared.sd_model.cond_stage_key == "edit" # "txt" + and self.sampler.model_wrap_cfg.image_cfg_scale is not None + and self.sampler.model_wrap_cfg.image_cfg_scale != 1.0) + + # cache. final result of current sampling step, [B, C=4, H//8, W//8] + # avoiding overhead of creating new tensors and weight summing + self.x_buffer: Tensor = None + self.w: int = int(self.p.width // opt_f) # latent size + self.h: int = int(self.p.height // opt_f) + # weights for background & grid bboxes + self.weights: Tensor = torch.zeros((1, 1, self.h, self.w), device=devices.device, dtype=torch.float32) + + # FIXME: I'm trying to count the step correctly but it's not working + self.step_count = 0 + self.inner_loop_count = 0 + self.kdiff_step = -1 + + # ext. Grid tiling painting (grid bbox) + self.enable_grid_bbox: bool = False + self.tile_w: int = None + self.tile_h: int = None + self.tile_bs: int = None + self.num_tiles: int = None + self.num_batches: int = None + self.batched_bboxes: List[List[BBox]] = [] + + # ext. Region Prompt Control (custom bbox) + self.enable_custom_bbox: bool = False + self.custom_bboxes: List[CustomBBox] = [] + self.cond_basis: Cond = None + self.uncond_basis: Uncond = None + self.draw_background: bool = True # by default we draw major prompts in grid tiles + self.causal_layers: bool = None + + # ext. Noise Inversion (noise inversion) + self.noise_inverse_enabled: bool = False + self.noise_inverse_steps: int = 0 + self.noise_inverse_retouch: float = None + self.noise_inverse_renoise_strength: float = None + self.noise_inverse_renoise_kernel: int = None + self.noise_inverse_get_cache = None + self.noise_inverse_set_cache = None + self.sample_img2img_original = None + + # ext. ControlNet + self.enable_controlnet: bool = False + self.controlnet_script: ModuleType = None + self.control_tensor_batch: List[List[Tensor]] = [] + self.control_params: Dict[str, Tensor] = {} + self.control_tensor_cpu: bool = None + self.control_tensor_custom: List[List[Tensor]] = [] + + # ext. StableSR + self.enable_stablesr: bool = False + self.stablesr_script: ModuleType = None + self.stablesr_tensor: Tensor = None + self.stablesr_tensor_batch: List[Tensor] = [] + self.stablesr_tensor_custom: List[Tensor] = [] + + @property + def is_kdiff(self): + return isinstance(self.sampler_raw, KDiffusionSampler) + + @property + def is_ddim(self): + return isinstance(self.sampler_raw, CompVisSampler) + + def update_pbar(self): + if self.pbar.n >= self.pbar.total: + self.pbar.close() + else: + if self.step_count == state.sampling_step: + self.inner_loop_count += 1 + if self.inner_loop_count < self.total_bboxes: + self.pbar.update() + else: + self.step_count = state.sampling_step + self.inner_loop_count = 0 + + def reset_buffer(self, x_in:Tensor): + # Judge if the shape of x_in is the same as the shape of x_buffer + if self.x_buffer is None or self.x_buffer.shape != x_in.shape: + self.x_buffer = torch.zeros_like(x_in, device=x_in.device, dtype=x_in.dtype) + else: + self.x_buffer.zero_() + + def init_done(self): + ''' + Call this after all `init_*`, settings are done, now perform: + - settings sanity check + - pre-computations, cache init + - anything thing needed before denoising starts + ''' + + self.total_bboxes = 0 + if self.enable_grid_bbox: self.total_bboxes += self.num_batches + if self.enable_custom_bbox: self.total_bboxes += len(self.custom_bboxes) + assert self.total_bboxes > 0, "Nothing to paint! No background to draw and no custom bboxes were provided." + + self.pbar = tqdm(total=(self.total_bboxes) * state.sampling_steps, desc=f"{self.method} Sampling: ") + + ''' ↓↓↓ cond_dict utils ↓↓↓ ''' + + def _tcond_key(self, cond_dict:CondDict) -> str: + return 'crossattn' if 'crossattn' in cond_dict else 'c_crossattn' + + def get_tcond(self, cond_dict:CondDict) -> Tensor: + tcond = cond_dict[self._tcond_key(cond_dict)] + if isinstance(tcond, list): tcond = tcond[0] + return tcond + + def set_tcond(self, cond_dict:CondDict, tcond:Tensor): + key = self._tcond_key(cond_dict) + if isinstance(cond_dict[key], list): tcond = [tcond] + cond_dict[key] = tcond + + def _icond_key(self, cond_dict:CondDict) -> str: + return 'c_adm' if shared.sd_model.model.conditioning_key in ['crossattn-adm', 'adm'] else 'c_concat' + + def get_icond(self, cond_dict:CondDict) -> Tensor: + ''' icond differs for different models (inpaint/unclip model) ''' + key = self._icond_key(cond_dict) + icond = cond_dict[key] + if isinstance(icond, list): icond = icond[0] + return icond + + def set_icond(self, cond_dict:CondDict, icond:Tensor): + key = self._icond_key(cond_dict) + if isinstance(cond_dict[key], list): icond = [icond] + cond_dict[key] = icond + + def _vcond_key(self, cond_dict:CondDict) -> Optional[str]: + return 'vector' if 'vector' in cond_dict else None + + def get_vcond(self, cond_dict:CondDict) -> Optional[Tensor]: + ''' vector for SDXL ''' + key = self._vcond_key(cond_dict) + return cond_dict.get(key) + + def set_vcond(self, cond_dict:CondDict, vcond:Optional[Tensor]): + key = self._vcond_key(cond_dict) + if key is not None: + cond_dict[key] = vcond + + def make_cond_dict(self, cond_in:CondDict, tcond:Tensor, icond:Tensor, vcond:Tensor=None) -> CondDict: + ''' copy & replace the content, returns a new object ''' + cond_out = cond_in.copy() + self.set_tcond(cond_out, tcond) + self.set_icond(cond_out, icond) + self.set_vcond(cond_out, vcond) + return cond_out + + ''' ↓↓↓ extensive functionality ↓↓↓ ''' + + @grid_bbox + def init_grid_bbox(self, tile_w:int, tile_h:int, overlap:int, tile_bs:int): + self.enable_grid_bbox = True + + self.tile_w = min(tile_w, self.w) + self.tile_h = min(tile_h, self.h) + overlap = max(0, min(overlap, min(tile_w, tile_h) - 4)) + # split the latent into overlapped tiles, then batching + # weights basically indicate how many times a pixel is painted + bboxes, weights = split_bboxes(self.w, self.h, self.tile_w, self.tile_h, overlap, self.get_tile_weights()) + self.weights += weights + self.num_tiles = len(bboxes) + self.num_batches = math.ceil(self.num_tiles / tile_bs) + self.tile_bs = math.ceil(len(bboxes) / self.num_batches) # optimal_batch_size + self.batched_bboxes = [bboxes[i*self.tile_bs:(i+1)*self.tile_bs] for i in range(self.num_batches)] + + @grid_bbox + def get_tile_weights(self) -> Union[Tensor, float]: + return 1.0 + + + @custom_bbox + def init_custom_bbox(self, bbox_settings:Dict[int,BBoxSettings], draw_background:bool, causal_layers:bool): + self.enable_custom_bbox = True + + self.causal_layers = causal_layers + self.draw_background = draw_background + if not draw_background: + self.enable_grid_bbox = False + self.weights.zero_() + + self.custom_bboxes: List[CustomBBox] = [] + for bbox_setting in bbox_settings.values(): + e, x, y, w, h, p, n, blend_mode, feather_ratio, seed = bbox_setting + if not e or x > 1.0 or y > 1.0 or w <= 0.0 or h <= 0.0: continue + x = int(x * self.w) + y = int(y * self.h) + w = math.ceil(w * self.w) + h = math.ceil(h * self.h) + x = max(0, x) + y = max(0, y) + w = min(self.w - x, w) + h = min(self.h - y, h) + self.custom_bboxes.append(CustomBBox(x, y, w, h, p, n, blend_mode, feather_ratio, seed)) + + if len(self.custom_bboxes) == 0: + self.enable_custom_bbox = False + return + + # prepare cond + p = self.p + prompts = p.all_prompts[:p.batch_size] + neg_prompts = p.all_negative_prompts[:p.batch_size] + for bbox in self.custom_bboxes: + bbox.cond, bbox.extra_network_data = Condition.get_custom_cond(prompts, bbox.prompt, p.steps, p.styles) + bbox.uncond = Condition.get_uncond(Prompt.append_prompt(neg_prompts, bbox.neg_prompt), p.steps, p.styles) + self.cond_basis = Condition.get_cond(prompts, p.steps) + self.uncond_basis = Condition.get_uncond(neg_prompts, p.steps) + + @custom_bbox + def reconstruct_custom_cond(self, org_cond:CondDict, custom_cond:Cond, custom_uncond:Uncond, bbox:CustomBBox) -> Tuple[List, Tensor, Uncond, Tensor]: + image_conditioning = None + if isinstance(org_cond, dict): + icond = self.get_icond(org_cond) + if icond.shape[2:] == (self.h, self.w): # img2img + icond = icond[bbox.slicer] + image_conditioning = icond + + sampler_step = self.sampler.model_wrap_cfg.step + tensor = Condition.reconstruct_cond(custom_cond, sampler_step) + custom_uncond = Condition.reconstruct_uncond(custom_uncond, sampler_step) + return tensor, custom_uncond, image_conditioning + + @custom_bbox + def kdiff_custom_forward(self, x_tile:Tensor, sigma_in:Tensor, original_cond:CondDict, bbox_id:int, bbox:CustomBBox, forward_func:Callable) -> Tensor: + ''' + The inner kdiff noise prediction is usually batched. + We need to unwrap the inside loop to simulate the batched behavior. + This can be extremely tricky. + ''' + + sampler_step = self.sampler.model_wrap_cfg.step + if self.kdiff_step != sampler_step: + self.kdiff_step = sampler_step + self.kdiff_step_bbox = [-1 for _ in range(len(self.custom_bboxes))] + self.tensor = {} # {int: Tensor[cond]} + self.uncond = {} # {int: Tensor[cond]} + self.image_cond_in = {} + # Initialize global prompts just for estimate the behavior of kdiff + self.real_tensor = Condition.reconstruct_cond(self.cond_basis, sampler_step) + self.real_uncond = Condition.reconstruct_uncond(self.uncond_basis, sampler_step) + # reset the progress for all bboxes + self.a = [0 for _ in range(len(self.custom_bboxes))] + + if self.kdiff_step_bbox[bbox_id] != sampler_step: + # When a new step starts for a bbox, we need to judge whether the tensor is batched. + self.kdiff_step_bbox[bbox_id] = sampler_step + + tensor, uncond, image_cond_in = self.reconstruct_custom_cond(original_cond, bbox.cond, bbox.uncond, bbox) + + if self.real_tensor.shape[1] == self.real_uncond.shape[1]: + if shared.batch_cond_uncond: + # when the real tensor is with equal length, all information is contained in x_tile. + # we simulate the batched behavior and compute all the tensors in one go. + if tensor.shape[1] == uncond.shape[1]: + # When our prompt tensor is with equal length, we can directly their code. + if not self.is_edit_model: + cond = torch.cat([tensor, uncond]) + else: + cond = torch.cat([tensor, uncond, uncond]) + self.set_custom_controlnet_tensors(bbox_id, x_tile.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, cond, image_cond_in), + ) + else: + # When not, we need to pass the tensor to UNet separately. + x_out = torch.zeros_like(x_tile) + cond_size = tensor.shape[0] + self.set_custom_controlnet_tensors(bbox_id, cond_size) + self.set_custom_stablesr_tensors(bbox_id) + cond_out = forward_func( + x_tile [:cond_size], + sigma_in[:cond_size], + cond=self.make_cond_dict(original_cond, tensor, image_cond_in[:cond_size]), + ) + uncond_size = uncond.shape[0] + self.set_custom_controlnet_tensors(bbox_id, uncond_size) + self.set_custom_stablesr_tensors(bbox_id) + uncond_out = forward_func( + x_tile [cond_size:cond_size+uncond_size], + sigma_in[cond_size:cond_size+uncond_size], + cond=self.make_cond_dict(original_cond, uncond, image_cond_in[cond_size:cond_size+uncond_size]), + ) + x_out[:cond_size] = cond_out + x_out[cond_size:cond_size+uncond_size] = uncond_out + if self.is_edit_model: + x_out[cond_size+uncond_size:] = uncond_out + return x_out + + # otherwise, the x_tile is only a partial batch. + # We have to denoise in different runs. + # We store the prompt and neg_prompt tensors for current bbox + self.tensor[bbox_id] = tensor + self.uncond[bbox_id] = uncond + self.image_cond_in[bbox_id] = image_cond_in + + # Now we get current batch of prompt and neg_prompt tensors + tensor: Tensor = self.tensor[bbox_id] + uncond: Tensor = self.uncond[bbox_id] + batch_size = x_tile.shape[0] + # get the start and end index of the current batch + a = self.a[bbox_id] + b = a + batch_size + self.a[bbox_id] += batch_size + + if self.real_tensor.shape[1] == self.real_uncond.shape[1]: + # When use --lowvram or --medvram, kdiff will slice the cond and uncond with [a:b] + # So we need to slice our tensor and uncond with the same index as original kdiff. + + # --- original code in kdiff --- + # if not self.is_edit_model: + # cond = torch.cat([tensor, uncond]) + # else: + # cond = torch.cat([tensor, uncond, uncond]) + # cond = cond[a:b] + # ------------------------------ + + # The original kdiff code is to concat and then slice, but this cannot apply to + # our custom prompt tensor when tensor.shape[1] != uncond.shape[1]. So we adapt it. + cond_in, uncond_in = None, None + # Slice the [prompt, neg prompt, (possibly) neg prompt] with [a:b] + if not self.is_edit_model: + if b <= tensor.shape[0]: cond_in = tensor[a:b] + elif a >= tensor.shape[0]: cond_in = uncond[a-tensor.shape[0]:b-tensor.shape[0]] + else: + cond_in = tensor[a:] + uncond_in = uncond[:b-tensor.shape[0]] + else: + if b <= tensor.shape[0]: + cond_in = tensor[a:b] + elif b > tensor.shape[0] and b <= tensor.shape[0] + uncond.shape[0]: + if a>= tensor.shape[0]: + cond_in = uncond[a-tensor.shape[0]:b-tensor.shape[0]] + else: + cond_in = tensor[a:] + uncond_in = uncond[:b-tensor.shape[0]] + else: + if a >= tensor.shape[0] + uncond.shape[0]: + cond_in = uncond[a-tensor.shape[0]-uncond.shape[0]:b-tensor.shape[0]-uncond.shape[0]] + elif a >= tensor.shape[0]: + cond_in = torch.cat([uncond[a-tensor.shape[0]:], uncond[:b-tensor.shape[0]-uncond.shape[0]]]) + + if uncond_in is None or tensor.shape[1] == uncond.shape[1]: + # If the tensor can be passed to UNet in one go, do it. + if uncond_in is not None: + cond_in = torch.cat([cond_in, uncond_in]) + self.set_custom_controlnet_tensors(bbox_id, x_tile.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, cond_in, self.image_cond_in[bbox_id]), + ) + else: + # If not, we need to pass the tensor to UNet separately. + x_out = torch.zeros_like(x_tile) + cond_size = cond_in.shape[0] + self.set_custom_controlnet_tensors(bbox_id, cond_size) + self.set_custom_stablesr_tensors(bbox_id) + cond_out = forward_func( + x_tile [:cond_size], + sigma_in[:cond_size], + cond=self.make_cond_dict(original_cond, cond_in, self.image_cond_in[bbox_id]) + ) + self.set_custom_controlnet_tensors(bbox_id, uncond_in.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + uncond_out = forward_func( + x_tile [cond_size:], + sigma_in[cond_size:], + cond=self.make_cond_dict(original_cond, uncond_in, self.image_cond_in[bbox_id]) + ) + x_out[:cond_size] = cond_out + x_out[cond_size:] = uncond_out + return x_out + + # If the original prompt is with different length, + # kdiff will deal with the cond and uncond separately. + # Hence we also deal with the tensor and uncond separately. + # get the start and end index of the current batch + + if a < tensor.shape[0]: + # Deal with custom prompt tensor + if not self.is_edit_model: + c_crossattn = tensor[a:b] + else: + c_crossattn = torch.cat([tensor[a:b]], uncond) + self.set_custom_controlnet_tensors(bbox_id, x_tile.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + # complete this batch. + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, c_crossattn, self.image_cond_in[bbox_id]) + ) + else: + # if the cond is finished, we need to process the uncond. + self.set_custom_controlnet_tensors(bbox_id, uncond.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, uncond, self.image_cond_in[bbox_id]) + ) + + @custom_bbox + def ddim_custom_forward(self, x:Tensor, cond_in:CondDict, bbox:CustomBBox, ts:Tensor, forward_func:Callable, *args, **kwargs) -> Tensor: + ''' draw custom bbox ''' + + tensor, uncond, image_conditioning = self.reconstruct_custom_cond(cond_in, bbox.cond, bbox.uncond, bbox) + + cond = tensor + # for DDIM, shapes definitely match. So we dont need to do the same thing as in the KDIFF sampler. + if uncond.shape[1] < cond.shape[1]: + last_vector = uncond[:, -1:] + last_vector_repeated = last_vector.repeat([1, cond.shape[1] - uncond.shape[1], 1]) + uncond = torch.hstack([uncond, last_vector_repeated]) + elif uncond.shape[1] > cond.shape[1]: + uncond = uncond[:, :cond.shape[1]] + + # Wrap the image conditioning back up since the DDIM code can accept the dict directly. + # Note that they need to be lists because it just concatenates them later. + if image_conditioning is not None: + cond = self.make_cond_dict(cond_in, cond, image_conditioning) + uncond = self.make_cond_dict(cond_in, uncond, image_conditioning) + + # We cannot determine the batch size here for different methods, so delay it to the forward_func. + return forward_func(x, cond, ts, unconditional_conditioning=uncond, *args, **kwargs) + + + @controlnet + def init_controlnet(self, controlnet_script:ModuleType, control_tensor_cpu:bool): + self.enable_controlnet = True + + self.controlnet_script = controlnet_script + self.control_tensor_cpu = control_tensor_cpu + self.control_tensor_batch = None + self.control_params = None + self.control_tensor_custom = [] + + self.prepare_controlnet_tensors() + + @controlnet + def reset_controlnet_tensors(self): + if not self.enable_controlnet: return + if self.control_tensor_batch is None: return + + for param_id in range(len(self.control_params)): + self.control_params[param_id].hint_cond = self.org_control_tensor_batch[param_id] + + @controlnet + def prepare_controlnet_tensors(self, refresh:bool=False): + ''' Crop the control tensor into tiles and cache them ''' + + if not refresh: + if self.control_tensor_batch is not None or self.control_params is not None: return + + if not self.enable_controlnet or self.controlnet_script is None: return + + latest_network = self.controlnet_script.latest_network + if latest_network is None or not hasattr(latest_network, 'control_params'): return + + self.control_params = latest_network.control_params + tensors = [param.hint_cond for param in latest_network.control_params] + self.org_control_tensor_batch = tensors + + if len(tensors) == 0: return + + self.control_tensor_batch = [] + for i in range(len(tensors)): + control_tile_list = [] + control_tensor = tensors[i] + for bboxes in self.batched_bboxes: + single_batch_tensors = [] + for bbox in bboxes: + if len(control_tensor.shape) == 3: + control_tensor.unsqueeze_(0) + control_tile = control_tensor[:, :, bbox[1]*opt_f:bbox[3]*opt_f, bbox[0]*opt_f:bbox[2]*opt_f] + single_batch_tensors.append(control_tile) + control_tile = torch.cat(single_batch_tensors, dim=0) + if self.control_tensor_cpu: + control_tile = control_tile.cpu() + control_tile_list.append(control_tile) + self.control_tensor_batch.append(control_tile_list) + + if len(self.custom_bboxes) > 0: + custom_control_tile_list = [] + for bbox in self.custom_bboxes: + if len(control_tensor.shape) == 3: + control_tensor.unsqueeze_(0) + control_tile = control_tensor[:, :, bbox[1]*opt_f:bbox[3]*opt_f, bbox[0]*opt_f:bbox[2]*opt_f] + if self.control_tensor_cpu: + control_tile = control_tile.cpu() + custom_control_tile_list.append(control_tile) + self.control_tensor_custom.append(custom_control_tile_list) + + @controlnet + def switch_controlnet_tensors(self, batch_id:int, x_batch_size:int, tile_batch_size:int, is_denoise=False): + if not self.enable_controlnet: return + if self.control_tensor_batch is None: return + + for param_id in range(len(self.control_params)): + control_tile = self.control_tensor_batch[param_id][batch_id] + if self.is_kdiff: + all_control_tile = [] + for i in range(tile_batch_size): + this_control_tile = [control_tile[i].unsqueeze(0)] * x_batch_size + all_control_tile.append(torch.cat(this_control_tile, dim=0)) + control_tile = torch.cat(all_control_tile, dim=0) + else: + control_tile = control_tile.repeat([x_batch_size if is_denoise else x_batch_size * 2, 1, 1, 1]) + self.control_params[param_id].hint_cond = control_tile.to(devices.device) + + @controlnet + def set_custom_controlnet_tensors(self, bbox_id:int, repeat_size:int): + if not self.enable_controlnet: return + if not len(self.control_tensor_custom): return + + for param_id in range(len(self.control_params)): + control_tensor = self.control_tensor_custom[param_id][bbox_id].to(devices.device) + self.control_params[param_id].hint_cond = control_tensor.repeat((repeat_size, 1, 1, 1)) + + + @stablesr + def init_stablesr(self, stablesr_script:ModuleType): + if stablesr_script.stablesr_model is None: return + self.stablesr_script = stablesr_script + def set_image_hook(latent_image): + self.enable_stablesr = True + self.stablesr_tensor = latent_image + self.stablesr_tensor_batch = [] + for bboxes in self.batched_bboxes: + single_batch_tensors = [] + for bbox in bboxes: + stablesr_tile = self.stablesr_tensor[:, :, bbox[1]:bbox[3], bbox[0]:bbox[2]] + single_batch_tensors.append(stablesr_tile) + stablesr_tile = torch.cat(single_batch_tensors, dim=0) + self.stablesr_tensor_batch.append(stablesr_tile) + if len(self.custom_bboxes) > 0: + self.stablesr_tensor_custom = [] + for bbox in self.custom_bboxes: + stablesr_tile = self.stablesr_tensor[:, :, bbox[1]:bbox[3], bbox[0]:bbox[2]] + self.stablesr_tensor_custom.append(stablesr_tile) + + stablesr_script.stablesr_model.set_image_hooks['TiledDiffusion'] = set_image_hook + + @stablesr + def reset_stablesr_tensors(self): + if not self.enable_stablesr: return + if self.stablesr_script.stablesr_model is None: return + self.stablesr_script.stablesr_model.latent_image = self.stablesr_tensor + + @stablesr + def switch_stablesr_tensors(self, batch_id:int): + if not self.enable_stablesr: return + if self.stablesr_script.stablesr_model is None: return + if self.stablesr_tensor_batch is None: return + self.stablesr_script.stablesr_model.latent_image = self.stablesr_tensor_batch[batch_id] + + @stablesr + def set_custom_stablesr_tensors(self, bbox_id:int): + if not self.enable_stablesr: return + if self.stablesr_script.stablesr_model is None: return + if not len(self.stablesr_tensor_custom): return + self.stablesr_script.stablesr_model.latent_image = self.stablesr_tensor_custom[bbox_id] + + + @noise_inverse + def init_noise_inverse(self, steps:int, retouch:float, get_cache_callback, set_cache_callback, renoise_strength:float, renoise_kernel:int): + self.noise_inverse_enabled = True + self.noise_inverse_steps = steps + self.noise_inverse_retouch = float(retouch) + self.noise_inverse_renoise_strength = float(renoise_strength) + self.noise_inverse_renoise_kernel = int(renoise_kernel) + if self.sample_img2img_original is None: + self.sample_img2img_original = self.sampler_raw.sample_img2img + self.sampler_raw.sample_img2img = MethodType(self.sample_img2img, self.sampler_raw) + self.noise_inverse_set_cache = set_cache_callback + self.noise_inverse_get_cache = get_cache_callback + + @noise_inverse + @keep_signature + def sample_img2img(self, sampler: KDiffusionSampler, p:ProcessingImg2Img, + x:Tensor, noise:Tensor, conditioning, unconditional_conditioning, + steps=None, image_conditioning=None): + # noise inverse sampling - renoise mask + import torch.nn.functional as F + renoise_mask = None + if self.noise_inverse_renoise_strength > 0: + image = p.init_images[0] + # convert to grayscale with PIL + image = image.convert('L') + np_mask = get_retouch_mask(np.asarray(image), self.noise_inverse_renoise_kernel) + renoise_mask = torch.from_numpy(np_mask).to(noise.device) + # resize retouch mask to match noise size + renoise_mask = 1 - F.interpolate(renoise_mask.unsqueeze(0).unsqueeze(0), size=noise.shape[-2:], mode='bilinear').squeeze(0).squeeze(0) + renoise_mask *= self.noise_inverse_renoise_strength + renoise_mask = torch.clamp(renoise_mask, 0, 1) + + prompts = p.all_prompts[:p.batch_size] + + latent = None + # try to use cached latent to save huge amount of time. + cached_latent: NoiseInverseCache = self.noise_inverse_get_cache() + if cached_latent is not None and \ + cached_latent.model_hash == p.sd_model.sd_model_hash and \ + cached_latent.noise_inversion_steps == self.noise_inverse_steps and \ + len(cached_latent.prompts) == len(prompts) and \ + all([cached_latent.prompts[i] == prompts[i] for i in range(len(prompts))]) and \ + abs(cached_latent.retouch - self.noise_inverse_retouch) < 0.01 and \ + cached_latent.x0.shape == p.init_latent.shape and \ + torch.abs(cached_latent.x0.to(p.init_latent.device) - p.init_latent).sum() < 100: # the 100 is an arbitrary threshold copy-pasted from the img2img alt code + # use cached noise + print('[Tiled Diffusion] Your checkpoint, image, prompts, inverse steps, and retouch params are all unchanged.') + print('[Tiled Diffusion] Noise Inversion will use the cached noise from the previous run. To clear the cache, click the Free GPU button.') + latent = cached_latent.xt.to(noise.device) + if latent is None: + # run noise inversion + shared.state.job_count += 1 + latent = self.find_noise_for_image_sigma_adjustment(sampler.model_wrap, self.noise_inverse_steps, prompts) + shared.state.nextjob() + self.noise_inverse_set_cache(p.init_latent.clone().cpu(), latent.clone().cpu(), prompts) + # The cache is only 1 latent image and is very small (16 MB for 8192 * 8192 image), so we don't need to worry about memory leakage. + + # calculate sampling steps + adjusted_steps, _ = sd_samplers_common.setup_img2img_steps(p, steps) + sigmas = sampler.get_sigmas(p, adjusted_steps) + inverse_noise = latent - (p.init_latent / sigmas[0]) + + # inject noise to high-frequency area so that the details won't lose too much + if renoise_mask is not None: + # If the background is not drawn, we need to filter out the un-drawn pixels and reweight foreground with feather mask + # This is to enable the renoise mask in regional inpainting + if not self.enable_grid_bbox: + background_count = torch.zeros((1, 1, noise.shape[2], noise.shape[3]), device=noise.device) + foreground_noise = torch.zeros_like(noise) + foreground_weight = torch.zeros((1, 1, noise.shape[2], noise.shape[3]), device=noise.device) + foreground_count = torch.zeros((1, 1, noise.shape[2], noise.shape[3]), device=noise.device) + for bbox in self.custom_bboxes: + if bbox.blend_mode == BlendMode.BACKGROUND: + background_count[bbox.slicer] += 1 + elif bbox.blend_mode == BlendMode.FOREGROUND: + foreground_noise [bbox.slicer] += noise[bbox.slicer] + foreground_weight[bbox.slicer] += bbox.feather_mask + foreground_count [bbox.slicer] += 1 + background_noise = torch.where(background_count > 0, noise, 0) + foreground_noise = torch.where(foreground_count > 0, foreground_noise / foreground_count, 0) + foreground_weight = torch.where(foreground_count > 0, foreground_weight / foreground_count, 0) + noise = background_noise * (1 - foreground_weight) + foreground_noise * foreground_weight + del background_noise, foreground_noise, foreground_weight, background_count, foreground_count + combined_noise = ((1 - renoise_mask) * inverse_noise + renoise_mask * noise) / ((renoise_mask**2 + (1 - renoise_mask)**2) ** 0.5) + else: + combined_noise = inverse_noise + + # use the estimated noise for the original img2img sampling + return self.sample_img2img_original(p, x, combined_noise, conditioning, unconditional_conditioning, steps, image_conditioning) + + @noise_inverse + @torch.no_grad() + def find_noise_for_image_sigma_adjustment(self, dnw, steps, prompts:List[str]) -> Tensor: + ''' + Migrate from the built-in script img2imgalt.py + Tiled noise inverse for better image upscaling + ''' + import k_diffusion as K + assert self.p.sampler_name == 'Euler' + + x = self.p.init_latent + s_in = x.new_ones([x.shape[0]]) + skip = 1 if shared.sd_model.parameterization == "v" else 0 + sigmas = dnw.get_sigmas(steps).flip(0) + + cond = self.p.sd_model.get_learned_conditioning(prompts) + if isinstance(cond, Tensor): # SD1/SD2 + cond_dict_dummy = { + 'c_crossattn': [], # List[Tensor] + 'c_concat': [], # List[Tensor] + } + cond_in = self.make_cond_dict(cond_dict_dummy, cond, self.p.image_conditioning) + else: # SDXL + cond_dict_dummy = { + 'crossattn': None, # Tensor + 'vector': None, # Tensor + 'c_concat': [], # List[Tensor] + } + cond_in = self.make_cond_dict(cond_dict_dummy, cond['crossattn'], self.p.image_conditioning, cond['vector']) + + state.sampling_steps = steps + pbar = tqdm(total=steps, desc='Noise Inversion') + for i in range(1, len(sigmas)): + if state.interrupted: return x + + state.sampling_step += 1 + + x_in = x + sigma_in = torch.cat([sigmas[i] * s_in]) + c_out, c_in = [K.utils.append_dims(k, x_in.ndim) for k in dnw.get_scalings(sigma_in)[skip:]] + + t = dnw.sigma_to_t(sigma_in) + t = t / self.noise_inverse_retouch + + eps = self.get_noise(x_in * c_in, t, cond_in, steps - i) + denoised = x_in + eps * c_out + + # Euler method: + d = (x - denoised) / sigmas[i] + dt = sigmas[i] - sigmas[i - 1] + x = x + d * dt + + sd_samplers_common.store_latent(x) + + # This is neccessary to save memory before the next iteration + del x_in, sigma_in, c_out, c_in, t, + del eps, denoised, d, dt + + pbar.update(1) + pbar.close() + + return x / sigmas[-1] + + @noise_inverse + @torch.no_grad() + def get_noise(self, x_in: Tensor, sigma_in:Tensor, cond_in:Dict[str, Tensor], step:int) -> Tensor: + raise NotImplementedError diff --git a/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/demofusion.py b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/demofusion.py new file mode 100644 index 0000000000000000000000000000000000000000..758ccfe0d13c6e92b878660a475905cf325a29fd --- /dev/null +++ b/extensions/CHECK/multidiffusion-upscaler-for-automatic1111/tile_methods/demofusion.py @@ -0,0 +1,353 @@ +from tile_methods.abstractdiffusion import AbstractDiffusion +from tile_utils.utils import * +import torch.nn.functional as F +import random +from copy import deepcopy +import inspect +from modules import sd_samplers_common + + +class DemoFusion(AbstractDiffusion): + """ + DemoFusion Implementation + https://arxiv.org/abs/2311.16973 + """ + + def __init__(self, p:Processing, *args, **kwargs): + super().__init__(p, *args, **kwargs) + assert p.sampler_name != 'UniPC', 'Demofusion is not compatible with UniPC!' + + + def hook(self): + steps, self.t_enc = sd_samplers_common.setup_img2img_steps(self.p, None) + + self.sampler.model_wrap_cfg.forward_ori = self.sampler.model_wrap_cfg.forward + self.sampler_forward = self.sampler.model_wrap_cfg.inner_model.forward + self.sampler.model_wrap_cfg.forward = self.forward_one_step + if self.is_kdiff: + self.sampler: KDiffusionSampler + self.sampler.model_wrap_cfg: CFGDenoiserKDiffusion + self.sampler.model_wrap_cfg.inner_model: Union[CompVisDenoiser, CompVisVDenoiser] + else: + self.sampler: CompVisSampler + self.sampler.model_wrap_cfg: CFGDenoiserTimesteps + self.sampler.model_wrap_cfg.inner_model: Union[CompVisTimestepsDenoiser, CompVisTimestepsVDenoiser] + self.timesteps = self.sampler.get_timesteps(self.p, steps) + + @staticmethod + def unhook(): + if hasattr(shared.sd_model, 'apply_model_ori'): + shared.sd_model.apply_model = shared.sd_model.apply_model_ori + del shared.sd_model.apply_model_ori + + def reset_buffer(self, x_in:Tensor): + super().reset_buffer(x_in) + + + + def repeat_tensor(self, x:Tensor, n:int) -> Tensor: + ''' repeat the tensor on it's first dim ''' + if n == 1: return x + B = x.shape[0] + r_dims = len(x.shape) - 1 + if B == 1: # batch_size = 1 (not `tile_batch_size`) + shape = [n] + [-1] * r_dims # [N, -1, ...] + return x.expand(shape) # `expand` is much lighter than `tile` + else: + shape = [n] + [1] * r_dims # [N, 1, ...] + return x.repeat(shape) + + def repeat_cond_dict(self, cond_in:CondDict, bboxes,mode) -> CondDict: + ''' repeat all tensors in cond_dict on it's first dim (for a batch of tiles), returns a new object ''' + # n_repeat + n_rep = len(bboxes) + # txt cond + tcond = self.get_tcond(cond_in) # [B=1, L, D] => [B*N, L, D] + tcond = self.repeat_tensor(tcond, n_rep) + # img cond + icond = self.get_icond(cond_in) + if icond.shape[2:] == (self.h, self.w): # img2img, [B=1, C, H, W] + if mode == 0: + if self.p.random_jitter: + jitter_range = self.jitter_range + icond = F.pad(icond,(jitter_range, jitter_range, jitter_range, jitter_range),'constant',value=0) + icond = torch.cat([icond[bbox.slicer] for bbox in bboxes], dim=0) + else: + icond = torch.cat([icond[:,:,bbox[1]::self.p.current_scale_num,bbox[0]::self.p.current_scale_num] for bbox in bboxes], dim=0) + else: # txt2img, [B=1, C=5, H=1, W=1] + icond = self.repeat_tensor(icond, n_rep) + + # vec cond (SDXL) + vcond = self.get_vcond(cond_in) # [B=1, D] + if vcond is not None: + vcond = self.repeat_tensor(vcond, n_rep) # [B*N, D] + return self.make_cond_dict(cond_in, tcond, icond, vcond) + + + def global_split_bboxes(self): + cols = self.p.current_scale_num + rows = cols + + bbox_list = [] + for row in range(rows): + y = row + for col in range(cols): + x = col + bbox = (x, y) + bbox_list.append(bbox) + + return bbox_list+bbox_list if self.p.mixture else bbox_list + + def split_bboxes_jitter(self,w_l:int, h_l:int, tile_w:int, tile_h:int, overlap:int=16, init_weight:Union[Tensor, float]=1.0) -> Tuple[List[BBox], Tensor]: + cols = math.ceil((w_l - overlap) / (tile_w - overlap)) + rows = math.ceil((h_l - overlap) / (tile_h - overlap)) + if rows==0: + rows=1 + if cols == 0: + cols=1 + dx = (w_l - tile_w) / (cols - 1) if cols > 1 else 0 + dy = (h_l - tile_h) / (rows - 1) if rows > 1 else 0 + bbox_list: List[BBox] = [] + self.jitter_range = 0 + for row in range(rows): + for col in range(cols): + h = min(int(row * dy), h_l - tile_h) + w = min(int(col * dx), w_l - tile_w) + if self.p.random_jitter: + self.jitter_range = min(max((min(self.w, self.h)-self.stride)//4,0),min(int(self.window_size/2),int(self.overlap/2))) + jitter_range = self.jitter_range + w_jitter = 0 + h_jitter = 0 + if (w != 0) and (w+tile_w != w_l): + w_jitter = random.randint(-jitter_range, jitter_range) + elif (w == 0) and (w + tile_w != w_l): + w_jitter = random.randint(-jitter_range, 0) + elif (w != 0) and (w + tile_w == w_l): + w_jitter = random.randint(0, jitter_range) + if (h != 0) and (h + tile_h != h_l): + h_jitter = random.randint(-jitter_range, jitter_range) + elif (h == 0) and (h + tile_h != h_l): + h_jitter = random.randint(-jitter_range, 0) + elif (h != 0) and (h + tile_h == h_l): + h_jitter = random.randint(0, jitter_range) + h +=(h_jitter + jitter_range) + w += (w_jitter + jitter_range) + + bbox = BBox(w, h, tile_w, tile_h) + bbox_list.append(bbox) + return bbox_list, None + + @grid_bbox + def get_views(self, overlap:int, tile_bs:int,tile_bs_g:int): + self.enable_grid_bbox = True + self.tile_w = self.window_size + self.tile_h = self.window_size + + self.overlap = max(0, min(overlap, self.window_size - 4)) + + self.stride = max(4,self.window_size - self.overlap) + + # split the latent into overlapped tiles, then batching + # weights basically indicate how many times a pixel is painted + bboxes, _ = self.split_bboxes_jitter(self.w, self.h, self.tile_w, self.tile_h, self.overlap, self.get_tile_weights()) + self.num_tiles = len(bboxes) + self.num_batches = math.ceil(self.num_tiles / tile_bs) + self.tile_bs = math.ceil(len(bboxes) / self.num_batches) # optimal_batch_size + self.batched_bboxes = [bboxes[i*self.tile_bs:(i+1)*self.tile_bs] for i in range(self.num_batches)] + + global_bboxes = self.global_split_bboxes() + self.global_num_tiles = len(global_bboxes) + self.global_num_batches = math.ceil(self.global_num_tiles / tile_bs_g) + self.global_tile_bs = math.ceil(len(global_bboxes) / self.global_num_batches) + self.global_batched_bboxes = [global_bboxes[i*self.global_tile_bs:(i+1)*self.global_tile_bs] for i in range(self.global_num_batches)] + + def gaussian_kernel(self,kernel_size=3, sigma=1.0, channels=3): + x_coord = torch.arange(kernel_size, device=devices.device) + gaussian_1d = torch.exp(-(x_coord - (kernel_size - 1) / 2) ** 2 / (2 * sigma ** 2)) + gaussian_1d = gaussian_1d / gaussian_1d.sum() + gaussian_2d = gaussian_1d[:, None] * gaussian_1d[None, :] + kernel = gaussian_2d[None, None, :, :].repeat(channels, 1, 1, 1) + + return kernel + + def gaussian_filter(self,latents, kernel_size=3, sigma=1.0): + channels = latents.shape[1] + kernel = self.gaussian_kernel(kernel_size, sigma, channels).to(latents.device, latents.dtype) + blurred_latents = F.conv2d(latents, kernel, padding=kernel_size//2, groups=channels) + + return blurred_latents + + + + ''' ↓↓↓ kernel hijacks ↓↓↓ ''' + @torch.no_grad() + @keep_signature + def forward_one_step(self, x_in, sigma, **kwarg): + if self.is_kdiff: + x_noisy = self.p.x + self.p.noise * sigma[0] + else: + alphas_cumprod = self.p.sd_model.alphas_cumprod + sqrt_alpha_cumprod = torch.sqrt(alphas_cumprod[self.timesteps[self.t_enc-self.p.current_step]]) + sqrt_one_minus_alpha_cumprod = torch.sqrt(1 - alphas_cumprod[self.timesteps[self.t_enc-self.p.current_step]]) + x_noisy = self.p.x*sqrt_alpha_cumprod + self.p.noise * sqrt_one_minus_alpha_cumprod + + self.cosine_factor = 0.5 * (1 + torch.cos(torch.pi *torch.tensor(((self.p.current_step + 1) / (self.t_enc+1))))) + + c1 = self.cosine_factor ** self.p.cosine_scale_1 + + x_in = x_in*(1 - c1) + x_noisy * c1 + + if self.p.random_jitter: + jitter_range = self.jitter_range + else: + jitter_range = 0 + x_in_ = F.pad(x_in,(jitter_range, jitter_range, jitter_range, jitter_range),'constant',value=0) + _,_,H,W = x_in.shape + + self.sampler.model_wrap_cfg.inner_model.forward = self.sample_one_step + self.repeat_3 = False + + x_out = self.sampler.model_wrap_cfg.forward_ori(x_in_,sigma, **kwarg) + self.sampler.model_wrap_cfg.inner_model.forward = self.sampler_forward + x_out = x_out[:,:,jitter_range:jitter_range+H,jitter_range:jitter_range+W] + + return x_out + + + @torch.no_grad() + @keep_signature + def sample_one_step(self, x_in, sigma, cond): + assert LatentDiffusion.apply_model + def repeat_func_1(x_tile:Tensor, bboxes,mode=0) -> Tensor: + sigma_tile = self.repeat_tensor(sigma, len(bboxes)) + cond_tile = self.repeat_cond_dict(cond, bboxes,mode) + return self.sampler_forward(x_tile, sigma_tile, cond=cond_tile) + + def repeat_func_2(x_tile:Tensor, bboxes,mode=0) -> Tuple[Tensor, Tensor]: + n_rep = len(bboxes) + ts_tile = self.repeat_tensor(sigma, n_rep) + if isinstance(cond, dict): # FIXME: when will enter this branch? + cond_tile = self.repeat_cond_dict(cond, bboxes,mode) + else: + cond_tile = self.repeat_tensor(cond, n_rep) + return self.sampler_forward(x_tile, ts_tile, cond=cond_tile) + + def repeat_func_3(x_tile:Tensor, bboxes,mode=0): + sigma_in_tile = sigma.repeat(len(bboxes)) + cond_out = self.repeat_cond_dict(cond, bboxes,mode) + x_tile_out = shared.sd_model.apply_model(x_tile, sigma_in_tile, cond=cond_out) + return x_tile_out + + if self.repeat_3: + repeat_func = repeat_func_3 + self.repeat_3 = False + elif self.is_kdiff: + repeat_func = repeat_func_1 + else: + repeat_func = repeat_func_2 + N,_,_,_ = x_in.shape + + + self.x_buffer = torch.zeros_like(x_in) + self.weights = torch.zeros_like(x_in) + + for batch_id, bboxes in enumerate(self.batched_bboxes): + if state.interrupted: return x_in + x_tile = torch.cat([x_in[bbox.slicer] for bbox in bboxes], dim=0) + x_tile_out = repeat_func(x_tile, bboxes) + # de-batching + for i, bbox in enumerate(bboxes): + self.x_buffer[bbox.slicer] += x_tile_out[i*N:(i+1)*N, :, :, :] + self.weights[bbox.slicer] += 1 + self.weights = torch.where(self.weights == 0, torch.tensor(1), self.weights) #Prevent NaN from appearing in random_jitter mode + + x_local = self.x_buffer/self.weights + + self.x_buffer = torch.zeros_like(self.x_buffer) + self.weights = torch.zeros_like(self.weights) + + std_, mean_ = x_in.std(), x_in.mean() + c3 = 0.99 * self.cosine_factor ** self.p.cosine_scale_3 + 1e-2 + if self.p.gaussian_filter: + x_in_g = self.gaussian_filter(x_in, kernel_size=(2*self.p.current_scale_num-1), sigma=self.sig*c3) + x_in_g = (x_in_g - x_in_g.mean()) / x_in_g.std() * std_ + mean_ + + if not hasattr(self.p.sd_model, 'apply_model_ori'): + self.p.sd_model.apply_model_ori = self.p.sd_model.apply_model + self.p.sd_model.apply_model = self.apply_model_hijack + x_global = torch.zeros_like(x_local) + jitter_range = self.jitter_range + end = x_global.shape[3]-jitter_range + + current_num = 0 + if self.p.mixture: + for batch_id, bboxes in enumerate(self.global_batched_bboxes): + current_num += len(bboxes) + if current_num > (self.global_num_tiles//2) and (current_num-self.global_tile_bs) < (self.global_num_tiles//2): + res = len(bboxes) - (current_num - self.global_num_tiles//2) + x_in_i = torch.cat([x_in[:,:,bbox[1]+jitter_range:end:self.p.current_scale_num,bbox[0]+jitter_range:end:self.p.current_scale_num] if idx
+ +
+
+ +
+
+ +
+
+ +
+
+ +
+
+ +
+
+
+Separator:{SEP}
+
+ +
+
+ +
+
+ +
+ +
+
+ +## Compatibility Table + +
| Feature | Example | Support |
|---|---|---|
| Control Net | OpenPose | Yes |
| Wildcards | __colors__ | Yes |
| Single LoRA | Style | Yes |
| Multi-LoRA | Characters | Limited |
| Prompt Scheduling | [from:to:steps] | No |
+ +## TypeError: 'NoneType' + +For people that get the following error: +```py +RuntimeError: shape '[X, Y, 1]' is invalid for input of size Z +shape '[X, Y, 1]' is invalid for input of size Z +*** Error completing request + ... + Traceback (most recent call last): + ... + res = list(func(*args, **kwargs)) + TypeError: 'NoneType' object is not iterable +``` + +1. Go to **Settings** -> **Optimizations**, and enable `Pad prompt/negative prompt` +2. Set the `Width` and `Height` to multiple of **64** + +
+ +## Special Thanks +- Credits to the original author, **[laksjdjf](https://github.com/laksjdjf)**, whose original [ComfyUI Node](https://github.com/laksjdjf/cgem156-ComfyUI/tree/main/scripts/attention_couple) I used to port into Forge +- Example images were generated with [Animagine XL V3.1](https://civitai.com/models/260267) and [juggernautXL v7](https://civitai.com/models/133005) diff --git a/extensions/CHECK/sd-forge-couple/example/00.jpg b/extensions/CHECK/sd-forge-couple/example/00.jpg new file mode 100644 index 0000000000000000000000000000000000000000..c6e2acf2b20a2151252cdd05546222fb4e3263a6 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/00.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/01.jpg b/extensions/CHECK/sd-forge-couple/example/01.jpg new file mode 100644 index 0000000000000000000000000000000000000000..45c7c8e1b5d0d018cd1d98c007e340073df03619 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/01.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/03.jpg b/extensions/CHECK/sd-forge-couple/example/03.jpg new file mode 100644 index 0000000000000000000000000000000000000000..f7ecb2d1ae3831ae527a5f7c049bfdfcffd84ad7 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/03.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/04.jpg b/extensions/CHECK/sd-forge-couple/example/04.jpg new file mode 100644 index 0000000000000000000000000000000000000000..1c1119524f181590c4d972e0512221aa6aa9a9a5 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/04.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/05.jpg b/extensions/CHECK/sd-forge-couple/example/05.jpg new file mode 100644 index 0000000000000000000000000000000000000000..f5a6f8f758ffca027d5d5f9d1d54cfd15210c4e2 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/05.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/06.jpg b/extensions/CHECK/sd-forge-couple/example/06.jpg new file mode 100644 index 0000000000000000000000000000000000000000..768b33ad6c0ae809b5f32ef0a96957b5de378f3a Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/06.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/07.jpg b/extensions/CHECK/sd-forge-couple/example/07.jpg new file mode 100644 index 0000000000000000000000000000000000000000..aa44ed171b094f044d6ba67054cf2cebf1257973 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/07.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/08.jpg b/extensions/CHECK/sd-forge-couple/example/08.jpg new file mode 100644 index 0000000000000000000000000000000000000000..338729da783de33cd968b36cf856ea4b12647542 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/08.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/09.jpg b/extensions/CHECK/sd-forge-couple/example/09.jpg new file mode 100644 index 0000000000000000000000000000000000000000..bdab247b6d9acadce356ca6fb8251f936d46ffd7 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/09.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/10.jpg b/extensions/CHECK/sd-forge-couple/example/10.jpg new file mode 100644 index 0000000000000000000000000000000000000000..b71bf3eb54a37cdc87f542375e527d53249b71dd Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/10.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/example/10s.jpg b/extensions/CHECK/sd-forge-couple/example/10s.jpg new file mode 100644 index 0000000000000000000000000000000000000000..1505158e5617817b569f824361f93bc3ae29d952 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/example/10s.jpg differ diff --git a/extensions/CHECK/sd-forge-couple/scripts/__pycache__/attention_couple.cpython-310.pyc b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/attention_couple.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..8481530bed036e320bb3e9c8723a92b5f37f08fd Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/attention_couple.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-forge-couple/scripts/__pycache__/attention_masks.cpython-310.pyc b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/attention_masks.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..5841405d4da8302076f24eb6c61f2474b0172b6a Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/attention_masks.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-forge-couple/scripts/__pycache__/couple_mapping.cpython-310.pyc b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/couple_mapping.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..6ebcd580f76c63fbec971b120749501efdd259d9 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/couple_mapping.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-forge-couple/scripts/__pycache__/couple_ui.cpython-310.pyc b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/couple_ui.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..d76212addf2d0d443e4cabcdb7646d97305882be Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/couple_ui.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-forge-couple/scripts/__pycache__/forge_couple.cpython-310.pyc b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/forge_couple.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..20e11ec41f2079b115ad52d3db611a4567566188 Binary files /dev/null and b/extensions/CHECK/sd-forge-couple/scripts/__pycache__/forge_couple.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-forge-couple/scripts/attention_couple.py b/extensions/CHECK/sd-forge-couple/scripts/attention_couple.py new file mode 100644 index 0000000000000000000000000000000000000000..334f7cbc6e5605a4803464059f155d36dd57357a --- /dev/null +++ b/extensions/CHECK/sd-forge-couple/scripts/attention_couple.py @@ -0,0 +1,88 @@ +""" +Credit: laksjdjf +https://github.com/laksjdjf/cgem156-ComfyUI/blob/main/scripts/attention_couple/node.py + +Modified by. Haoming02 to work with Forge +""" + +from scripts.attention_masks import get_mask, lcm_for_list +from modules.devices import get_optimal_device +import torch + + +class AttentionCouple: + + def patch_unet(self, model, base_mask, kwargs: dict): + + new_model = model.clone() + dtype = new_model.model.diffusion_model.dtype + device = get_optimal_device() + + num_conds = len(kwargs) // 2 + 1 + + mask = [base_mask] + [kwargs[f"mask_{i}"] for i in range(1, num_conds)] + mask = torch.stack(mask, dim=0).to(device, dtype=dtype) + assert mask.sum(dim=0).min() > 0, "Masks must not contain zeroes..." + mask = mask / mask.sum(dim=0, keepdim=True) + + conds = [ + kwargs[f"cond_{i}"][0][0].to(device, dtype=dtype) + for i in range(1, num_conds) + ] + num_tokens = [cond.shape[1] for cond in conds] + + def attn2_patch(q, k, v, extra_options): + assert k.mean() == v.mean(), "k and v must be the same." + cond_or_unconds = extra_options["cond_or_uncond"] + num_chunks = len(cond_or_unconds) + self.batch_size = q.shape[0] // num_chunks + q_chunks = q.chunk(num_chunks, dim=0) + k_chunks = k.chunk(num_chunks, dim=0) + lcm_tokens = lcm_for_list(num_tokens + [k.shape[1]]) + conds_tensor = torch.cat( + [ + cond.repeat(self.batch_size, lcm_tokens // num_tokens[i], 1) + for i, cond in enumerate(conds) + ], + dim=0, + ) + + qs, ks = [], [] + for i, cond_or_uncond in enumerate(cond_or_unconds): + k_target = k_chunks[i].repeat(1, lcm_tokens // k.shape[1], 1) + if cond_or_uncond == 1: # uncond + qs.append(q_chunks[i]) + ks.append(k_target) + else: + qs.append(q_chunks[i].repeat(num_conds, 1, 1)) + ks.append(torch.cat([k_target, conds_tensor], dim=0)) + + qs = torch.cat(qs, dim=0) + ks = torch.cat(ks, dim=0) + + return qs, ks, ks + + def attn2_output_patch(out, extra_options): + cond_or_unconds = extra_options["cond_or_uncond"] + mask_downsample = get_mask( + mask, self.batch_size, out.shape[1], extra_options["original_shape"] + ) + outputs = [] + pos = 0 + for cond_or_uncond in cond_or_unconds: + if cond_or_uncond == 1: # uncond + outputs.append(out[pos : pos + self.batch_size]) + pos += self.batch_size + else: + masked_output = ( + out[pos : pos + num_conds * self.batch_size] * mask_downsample + ).view(num_conds, self.batch_size, out.shape[1], out.shape[2]) + masked_output = masked_output.sum(dim=0) + outputs.append(masked_output) + pos += num_conds * self.batch_size + return torch.cat(outputs, dim=0) + + new_model.set_model_attn2_patch(attn2_patch) + new_model.set_model_attn2_output_patch(attn2_output_patch) + + return new_model diff --git a/extensions/CHECK/sd-forge-couple/scripts/attention_masks.py b/extensions/CHECK/sd-forge-couple/scripts/attention_masks.py new file mode 100644 index 0000000000000000000000000000000000000000..305ec576c586e3734cbfe40a8379086ec55b8ee0 --- /dev/null +++ b/extensions/CHECK/sd-forge-couple/scripts/attention_masks.py @@ -0,0 +1,42 @@ +""" +Credit: laksjdjf +https://github.com/laksjdjf/cgem156-ComfyUI/blob/main/scripts/attention_couple/node.py +""" + +import torch.nn.functional as F +import math + + +def get_mask(mask, batch_size, num_tokens, original_shape): + num_conds = mask.shape[0] + + if original_shape[2] * original_shape[3] == num_tokens: + down_sample_rate = 1 + elif (original_shape[2] // 2) * (original_shape[3] // 2) == num_tokens: + down_sample_rate = 2 + elif (original_shape[2] // 4) * (original_shape[3] // 4) == num_tokens: + down_sample_rate = 4 + else: + down_sample_rate = 8 + + size = ( + original_shape[2] // down_sample_rate, + original_shape[3] // down_sample_rate, + ) + mask_downsample = F.interpolate(mask, size=size, mode="nearest") + mask_downsample = mask_downsample.view(num_conds, num_tokens, 1).repeat_interleave( + batch_size, dim=0 + ) + + return mask_downsample + + +def lcm(a, b): + return a * b // math.gcd(a, b) + + +def lcm_for_list(numbers): + current_lcm = numbers[0] + for number in numbers[1:]: + current_lcm = lcm(current_lcm, number) + return current_lcm diff --git a/extensions/CHECK/sd-forge-couple/scripts/couple_mapping.py b/extensions/CHECK/sd-forge-couple/scripts/couple_mapping.py new file mode 100644 index 0000000000000000000000000000000000000000..ffe63cd6957bb843f3c37ed80fb670822106fd93 --- /dev/null +++ b/extensions/CHECK/sd-forge-couple/scripts/couple_mapping.py @@ -0,0 +1,96 @@ +from modules.prompt_parser import SdConditioning +from scripts.couple_ui import parse_mapping +import torch + + +def empty_tensor(H: int, W: int): + return torch.zeros((H, W)).unsqueeze(0) + + +def advanced_mapping(sd_model, couples: list, WIDTH: int, HEIGHT: int, mapping: list): + data = parse_mapping(mapping) + assert len(couples) == len(data) + + ARGs: dict = {} + IS_SDXL: bool = hasattr( + sd_model.forge_objects.unet.model.diffusion_model, "label_emb" + ) + + for tile_index in range(len(data)): + mask = torch.zeros((HEIGHT, WIDTH)) + + (X, Y, W) = data[tile_index] + x_from = int(WIDTH * X[0]) + x_to = int(WIDTH * X[1]) + y_from = int(HEIGHT * Y[0]) + y_to = int(HEIGHT * Y[1]) + weight = W + + # ===== Cond ===== + texts = SdConditioning([couples[tile_index]], False, WIDTH, HEIGHT, None) + cond = sd_model.get_learned_conditioning(texts) + pos_cond = [[cond["crossattn"]]] if IS_SDXL else [[cond]] + # ===== Cond ===== + + # ===== Mask ===== + mask[y_from:y_to, x_from:x_to] = weight + # ===== Mask ===== + + ARGs[f"cond_{tile_index + 1}"] = pos_cond + ARGs[f"mask_{tile_index + 1}"] = mask.unsqueeze(0) + + return ARGs + + +def basic_mapping( + sd_model, + couples: list, + WIDTH: int, + HEIGHT: int, + LINE_COUNT: int, + IS_HORIZONTAL: bool, + background: str, + TILE_SIZE: int, + TILE_WEIGHT: float, + BG_WEIGHT: float, +): + + ARGs: dict = {} + IS_SDXL: bool = hasattr( + sd_model.forge_objects.unet.model.diffusion_model, "label_emb" + ) + + for tile in range(LINE_COUNT): + mask = torch.zeros((HEIGHT, WIDTH)) + + # ===== Cond ===== + texts = SdConditioning([couples[tile]], False, WIDTH, HEIGHT, None) + cond = sd_model.get_learned_conditioning(texts) + pos_cond = [[cond["crossattn"]]] if IS_SDXL else [[cond]] + # ===== Cond ===== + + # ===== Mask ===== + if background == "First Line": + if tile == 0: + mask = torch.ones((HEIGHT, WIDTH)) * BG_WEIGHT + else: + if IS_HORIZONTAL: + mask[:, (tile - 1) * TILE_SIZE : tile * TILE_SIZE] = TILE_WEIGHT + else: + mask[(tile - 1) * TILE_SIZE : tile * TILE_SIZE, :] = TILE_WEIGHT + else: + if IS_HORIZONTAL: + mask[:, tile * TILE_SIZE : (tile + 1) * TILE_SIZE] = TILE_WEIGHT + else: + mask[tile * TILE_SIZE : (tile + 1) * TILE_SIZE, :] = TILE_WEIGHT + # ===== Mask ===== + + ARGs[f"cond_{tile + 1}"] = pos_cond + ARGs[f"mask_{tile + 1}"] = mask.unsqueeze(0) + + if background == "Last Line": + ARGs[f"mask_{LINE_COUNT}"] = ( + torch.ones((HEIGHT, WIDTH)) * BG_WEIGHT + ).unsqueeze(0) + + return ARGs diff --git a/extensions/CHECK/sd-forge-couple/scripts/couple_ui.py b/extensions/CHECK/sd-forge-couple/scripts/couple_ui.py new file mode 100644 index 0000000000000000000000000000000000000000..b358af960a6fad0ebbb78a52fbd912c19fc0120a --- /dev/null +++ b/extensions/CHECK/sd-forge-couple/scripts/couple_ui.py @@ -0,0 +1,167 @@ +from PIL import Image, ImageDraw +import gradio as gr + + +def parse_mapping(data: list) -> list: + mapping = [] + + for [X, Y, W] in data: + if not X.strip(): + continue + + mapping.append( + ( + (float(X.split(":")[0]), float(X.split(":")[1])), + (float(Y.split(":")[0]), float(Y.split(":")[1])), + float(W), + ) + ) + + return mapping + + +def validata_mapping(data: list) -> bool: + try: + for [X, Y, W] in data: + if not X.strip(): + continue + + float(X.split(":")[0]) + float(X.split(":")[1]) + float(Y.split(":")[0]) + float(Y.split(":")[1]) + float(W) + + return True + + except AssertionError: + print("\n\n[Couple] Incorrect number of : in Mapping...\n\n") + return False + except ValueError: + print("\n\n[Couple] Non-Number in Mapping...\n\n") + return False + + +def visualize_mapping(p_WIDTH: int, p_HEIGHT: int, data: list) -> Image: + if not (validata_mapping(data)): + return None + + COLORS = ("red", "orange", "yellow", "green", "blue", "violet", "purple", "white") + + matt = Image.new("RGB", (p_WIDTH, p_HEIGHT), "black") + draw = ImageDraw.Draw(matt) + + mapping = parse_mapping(data) + + print("\nAdv. Preview:") + for tile_index in range(len(mapping)): + color_index = tile_index % len(COLORS) + + (X, Y, W) = mapping[tile_index] + x_from = int(p_WIDTH * X[0]) + x_to = int(p_WIDTH * X[1]) + y_from = int(p_HEIGHT * Y[0]) + y_to = int(p_HEIGHT * Y[1]) + weight = W + + print(f" [{y_from:4d}:{y_to:4d}, {x_from:4d}:{x_to:4d}] = {weight:.2f}") + draw.rectangle( + [(x_from, y_from), (x_to, y_to)], outline=COLORS[color_index], width=2 + ) + + return matt + + +def couple_UI(script, title: str): + with gr.Accordion(label=title, open=False): + with gr.Row(): + enable = gr.Checkbox(label="Enable", elem_id="fc_enable") + + mode = gr.Radio( + ["Basic", "Advanced"], + label="Region Assignment", + value="Basic", + ) + + separator = gr.Textbox( + label="Couple Separator", + lines=1, + max_lines=1, + placeholder="Leave empty to use newline", + ) + + with gr.Group() as basic_settings: + with gr.Row(): + direction = gr.Radio( + ["Horizontal", "Vertical"], + label="Tile Direction", + value="Horizontal", + ) + + background = gr.Radio( + ["None", "First Line", "Last Line"], + label="Global Effect", + value="None", + ) + + with gr.Group(visible=False, elem_id="fc_adv") as adv_settings: + mapping = gr.Dataframe( + label="Mapping", + headers=["x", "y", "weight"], + datatype="str", + row_count=(2, "dynamic"), + col_count=(3, "fixed"), + interactive=True, + type="array", + value=[["0:0.5", "0.0:1.0", "1.0"], ["0.5:1.0", "0.0:1.0", "1.0"]], + ) + + preview_img = gr.Image( + image_mode="RGB", + label="Mapping Preview", + type="pil", + interactive=False, + height=512, + ) + + with gr.Row(): + preview_width = gr.Number(value=1024, label="Width", precision=0) + preview_height = gr.Number(value=1024, label="Height", precision=0) + + preview_btn = gr.Button("Preview Mapping", elem_id="fc_preview") + + preview_btn.click( + visualize_mapping, + [preview_width, preview_height, mapping], + preview_img, + ) + + def on_radio_change(choice): + if choice == "Basic": + return [ + gr.Group.update(visible=True), + gr.Group.update(visible=False), + ] + else: + return [ + gr.Group.update(visible=False), + gr.Group.update(visible=True), + ] + + mode.change(on_radio_change, mode, [basic_settings, adv_settings]) + + script.paste_field_names = [] + script.infotext_fields = [ + (enable, "forge_couple"), + (direction, "forge_couple_direction"), + (background, "forge_couple_background"), + (separator, "forge_couple_separator"), + (mode, "forge_couple_mode"), + (mapping, "forge_couple_mapping"), + ] + + for comp, name in script.infotext_fields: + comp.do_not_save_to_config = True + script.paste_field_names.append(name) + + return [enable, direction, background, separator, mode, mapping] diff --git a/extensions/CHECK/sd-forge-couple/scripts/forge_couple.py b/extensions/CHECK/sd-forge-couple/scripts/forge_couple.py new file mode 100644 index 0000000000000000000000000000000000000000..f81ff8471c7de147bdabfa29251a5ec2eb26c569 --- /dev/null +++ b/extensions/CHECK/sd-forge-couple/scripts/forge_couple.py @@ -0,0 +1,149 @@ +from modules import scripts +import re + +from scripts.couple_mapping import empty_tensor, basic_mapping, advanced_mapping +from scripts.couple_ui import couple_UI, validata_mapping, parse_mapping + +from scripts.attention_couple import AttentionCouple +forgeAttentionCouple = AttentionCouple() + +VERSION = "1.3.0" + + +class ForgeCouple(scripts.Script): + + def __init__(self): + self.couples: list = None + + def title(self): + return "Forge Couple" + + def show(self, is_img2img): + return scripts.AlwaysVisible + + def ui(self, *args, **kwargs): + return couple_UI(self, f"{self.title()} {VERSION}") + + def parse_networks(self, prompt: str) -> str: + """LoRAs are already parsed""" + pattern = re.compile(r"<.*?>") + cleaned = re.sub(pattern, "", prompt) + + return cleaned + + def after_extra_networks_activate( + self, + p, + enable: bool, + direction: str, + background: str, + separator: str, + mode: str, + mapping: list, + *args, + **kwargs, + ): + if not enable: + return + + if not separator.strip(): + separator = "\n" + + couples = [] + + chunks = kwargs["prompts"][0].split(separator) + for chunk in chunks: + prompt = self.parse_networks(chunk).strip() + + if not prompt.strip(): + # Skip Empty Lines + continue + + couples.append(prompt) + + if len(couples) < (3 if background != "None" else 2): + print("\n\n[Couple] Not Enough Lines in Prompt...\n\n") + self.couples = None + return + + if (mode == "Advanced") and (len(couples) != len(parse_mapping(mapping))): + print("\n\n[Couple] Number of Couples and Mapping is not the same...\n\n") + self.couples = None + return + + if (mode == "Advanced") and not validata_mapping(mapping): + self.couples = None + return + + self.couples = couples + + def process_before_every_sampling( + self, + p, + enable: bool, + direction: str, + background: str, + separator: str, + mode: str, + mapping: list, + *args, + **kwargs, + ): + + if not enable or not self.couples: + return + + # ===== Infotext ===== + p.extra_generation_params["forge_couple"] = True + p.extra_generation_params["forge_couple_separator"] = "\n" if not separator.strip() else separator + p.extra_generation_params["forge_couple_mode"] = mode + if mode == "Basic": + p.extra_generation_params["forge_couple_direction"] = direction + p.extra_generation_params["forge_couple_background"] = background + else: + p.extra_generation_params["forge_couple_mapping"] = mapping + # ===== Infotext ===== + + # ===== Init ===== + unet = p.sd_model.forge_objects.unet + + WIDTH: int = p.width + HEIGHT: int = p.height + IS_HORIZONTAL: bool = direction == "Horizontal" + + LINE_COUNT: int = len(self.couples) + TILE_COUNT: int = LINE_COUNT - (background != "None") + + if mode == "Basic": + TILE_WEIGHT: float = 1.25 if background == "None" else 1.0 + BG_WEIGHT: float = 0.0 if background == "None" else 0.5 + + TILE_SIZE: int = ( + (WIDTH if IS_HORIZONTAL else HEIGHT) - 1 + ) // TILE_COUNT + 1 + # ===== Init ===== + + # ===== Tiles ===== + if mode == "Basic": + ARGs = basic_mapping( + p.sd_model, + self.couples, + WIDTH, + HEIGHT, + LINE_COUNT, + IS_HORIZONTAL, + background, + TILE_SIZE, + TILE_WEIGHT, + BG_WEIGHT, + ) + + else: + ARGs = advanced_mapping(p.sd_model, self.couples, WIDTH, HEIGHT, mapping) + # ===== Tiles ===== + + assert len(ARGs.keys()) // 2 == LINE_COUNT + + base_mask = empty_tensor(HEIGHT, WIDTH) + patched_unet = forgeAttentionCouple.patch_unet(unet, base_mask, ARGs) + p.sd_model.forge_objects.unet = patched_unet diff --git a/extensions/CHECK/sd-forge-couple/style.css b/extensions/CHECK/sd-forge-couple/style.css new file mode 100644 index 0000000000000000000000000000000000000000..beb29654c5f1f9e4d650d4f69d9c486f1efeede4 --- /dev/null +++ b/extensions/CHECK/sd-forge-couple/style.css @@ -0,0 +1,22 @@ +#fc_adv { + flex-direction: row; + justify-content: center; +} + +#fc_adv>div { + gap: 2em; + width: 100%; +} + +#fc_adv .gradio-image { + width: 100%; +} + +#fc_enable label { + height: 100%; +} + +#fc_preview { + margin: 0.25em 1em; + border-radius: 0.5em; +} diff --git a/extensions/CHECK/sd-webui-agentattention/.gitignore b/extensions/CHECK/sd-webui-agentattention/.gitignore new file mode 100644 index 0000000000000000000000000000000000000000..c18dd8d83ceed1806b50b0aaa46beb7e335fff13 --- /dev/null +++ b/extensions/CHECK/sd-webui-agentattention/.gitignore @@ -0,0 +1 @@ +__pycache__/ diff --git a/extensions/CHECK/sd-webui-agentattention/LICENSE b/extensions/CHECK/sd-webui-agentattention/LICENSE new file mode 100644 index 0000000000000000000000000000000000000000..f288702d2fa16d3cdf0035b15a9fcbc552cd88e7 --- /dev/null +++ b/extensions/CHECK/sd-webui-agentattention/LICENSE @@ -0,0 +1,674 @@ + GNU GENERAL PUBLIC LICENSE + Version 3, 29 June 2007 + + Copyright (C) 2007 Free Software Foundation, Inc.
Update Info
+ +Upper is newer. + +-
+
- 026ff95a492a533a4a6e5fb2959c2324258c232c +
- SDXL support. +
- 527ed922b2c4f8d2620376589dfce0f9f4b622ad +
- Add support for the newer version of WebUI. +
- 20e87ce264338b824296b7559679ed1bb0bdacd7 +
- Skip empty targets. +
- 03bfe60162ba418e18dbaf8f1b9711fd62195ef3 +
- Add
Disable for Negative promptoption. Default isTrue.
+ - f0990088fed0f5013a659cacedb194313a398860 +
- Accept an empty prompt. +
-
+
- Disable for Negative prompt. +
- If enabled, Cutoff will not work for the negative prompt. Default is
true.
+ - Cutoff strongly. +
- See description below. Default is
false.
+ - Interpolation method +
- How "padded" and "original" vectors will be interpolated. Default is
Lerp.
+ - Padding token +
- What token will be padded instead of
Target tokens. Default is_(underbar).
+
+ +*Left: Less detail, Middle: Original, Right: More detail*
+ +*Model: SD 1.5 (finetuned)*
+ +*Left: Less detail, Middle: Original, Right: More detail*
+ + +## How It Works +Detail Daemon works by manipulating the original noise levels at every sampling step, according to a customizable schedule. + +### In Theory +The noise levels (sigmas, i.e. the standard deviation of the noise) tell the model how much noise it should expect, and try to remove, at each denoising step. A higher sigma value at a certain denoising step tells the model to denoise more aggressively at that step and vice versa. + +With a common sigmas schedule, the sigmas start at very high values at the beginning of the denoising process, then quickly fall to low values in the middle, and to very low values towards the end of the process. This curve (along with the timesteps schedule, but that's a story for another day) is what makes it so that larger features (low frequencies) of the image are defined at the earlier steps, and towards the end of the process you can only see minor changes in the smaller features (high frequencies). We'll get back to this later. + +Now, if we pass the model a sigmas schedule with values lower than the original, at each step the model will denoise less, resulting a noisier output latent at that step. But then in the steps after that, the model does its best to make sense of this extra noise and turn it into image features. So in theory, *when done in modesty*, this would result in a more detailed image. If you push it too hard, the model won't be able to handle the extra noise added at each step and the end result will devolve into pure noise. So modesty is key. + +### But in Practice +Modesty only gets you so far! Also, wtf are those? As the examples below show, you can't really add that much detail to the image before it either breaks down, and/or becomes a totally different thing. + +*SD 1.5*
+ +Original sigmas (left) multiplied by .9, .85, .8
+ +*SDXL*
+ +Original sigmas (left) multiplied by .95, .9, .85, .875, .8
+ +That's because: +1. We're constantly adding noise and not giving the model enough time to deal with it +2. We are manipulating the early steps where the low frequency features of the image (color, composition, etc.) are defined + +### Enter the Schedule +What we usually mean by "detail" falls within the mid to high frequency range, which correspond to the middle to late steps in the sampling process. So if we skip the early steps to leave the main features of the image intact, and the late steps to give the model some time to turn the extra noise into useful detail, we'll have something like this: + + + +Then we could make our schedule a bit fancier and have it target specific steps corresponding to different sized details: + + + +Which steps correspond to which exact frequency range depends on the model you're using, the sampler, your prompt (specially if you're using Prompt Editing and stuff), and probably a bunch of other things. There are also fancier things you can (and should) do with the schedule, like pushing the sigmas too low for some heavy extra noise and then too high to clean up the excess and leave some nice details. So you need to do some tweaking to figure out the best schedule for each image you generate, or at least the ones that need their level of detail adjusted. But ideally you should be spending countless hours of your life sculpting the perfect detail adjustment schedule for every image, cuz that's why we're here. + +I'll soon provide specific examples addressing different scenarios and some of the techniques I've come up with. (note to self: move these to the wiki page) + +## Installation +Open SD WebUI > Go to Extensions tab > Go to Available tab > Click Load from: > Find Detail Daemon > Click Install + +Or Go to Install from URL tab > Paste this repo's URL into the first field > Click Install + +Or go to your WebUI folder and manually clone this repo into your extensions folder: + +`git clone "https://github.com/muerrilla/sd-webui-detail-daemon" extensions/sd-webui-detail-daemon` + +## Getting Started +After installation you can find the extension in your txt2img and img2img tabs. + +### Sliders: +The sliders (and that one checkbox) set the amount of adjustment (positive values → add detail, negative values → remove detail) and the sampling steps during which it is applied (i.e. the schedule). So the X axis of the graph is your sampling steps, normalized to the (0,1) range, and the Y axis is the amount of adjustment. The rest is pretty self-explanatory I think. Just drag things and look at the graph for changes. +### Numbers: +The three number inputs at the buttom are provided because sometimes the slider max/mins are too limiting. +### Modes: +The `cond` and `uncond` modes affect only their respective latents, while `both` affects both (duh!). The `cond` and `uncond` modes are less intense and also allow changes to be applied at earlier steps without diverging too far from the original generation, since the other latent stays intact. + +There's also a minor twist: in the `both` mode if `detail amount` is positive both cond and uncond latents become more detailed. So the more detailed cond latent will try to push the generation towards more detail, while the more detailed uncond latent will try to push towards less detail. This causes more new features/artifacts to pop into the image in this mode. + +### Tips: +I'll write up some proper docs on how best to set the parameters, as soon as possible. For now you gotta play around with the sliders and figure out how the shape of the schedule affects the image. I suggest you set your live preview update period to every frame, or every other frame, so you could see clearly what's going on at every step of the sampling process and how Detail Daemon affects it, till you get a good grasp of how this thing works. + +## Notes: +- Doesn't support Compositional Diffusion (i.e. the AND syntax) properly. Specially if you have a batch size > 1 or negative weights in your prompts, and the mode is set to `cond` or `uncond`. +- It's probably impossible to use or very hard to control with few-step models (Turbo, Lightning, etc.). Edit: It's managable. +- It works with Forge (`cond` and `uncond` modes are not supported). +- It's not the same as AlignYourSteps, FreeU, etc. +- It is similar (in what it sets out to do, not in how it does it) to the [ReSharpen Extension](https://github.com/Haoming02/sd-webui-resharpen) by Haoming. diff --git a/extensions/CHECK/sd-webui-detail-daemon/scripts/__pycache__/detail_daemon.cpython-310.pyc b/extensions/CHECK/sd-webui-detail-daemon/scripts/__pycache__/detail_daemon.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..7158728cfb19a5659b3edaa1961896ff2caf983b Binary files /dev/null and b/extensions/CHECK/sd-webui-detail-daemon/scripts/__pycache__/detail_daemon.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-webui-detail-daemon/scripts/detail_daemon.py b/extensions/CHECK/sd-webui-detail-daemon/scripts/detail_daemon.py new file mode 100644 index 0000000000000000000000000000000000000000..d63d9900ab1d8a9223fd397cf64d062889907f2d --- /dev/null +++ b/extensions/CHECK/sd-webui-detail-daemon/scripts/detail_daemon.py @@ -0,0 +1,313 @@ +import os +import gradio as gr +import numpy as np +from tqdm import tqdm + +import matplotlib +matplotlib.use('Agg') +import matplotlib.pyplot as plt + +import modules.scripts as scripts +from modules.script_callbacks import on_cfg_denoiser, remove_callbacks_for_function, on_infotext_pasted +from modules.ui_components import InputAccordion + + +def parse_infotext(infotext, params): + try: + d = {} + for s in params['Detail Daemon'].split(','): + k, _, v = s.partition(':') + d[k.strip()] = v.strip() + params['Detail Daemon'] = d + except Exception: + pass + + +on_infotext_pasted(parse_infotext) + + +class Script(scripts.Script): + + def title(self): + return "Detail Daemon" + + def show(self, is_img2img): + return scripts.AlwaysVisible + + def ui(self, is_img2img): + with InputAccordion(False, label="Detail Daemon", elem_id=self.elem_id('detail-daemon')) as gr_enabled: + with gr.Row(): + with gr.Column(scale=2): + gr_amount_slider = gr.Slider(minimum=-1.00, maximum=1.00, step=.01, value=0.10, label="Detail Amount") + gr_start = gr.Slider(minimum=0.0, maximum=1.0, step=.01, value=0.2, label="Start") + gr_end = gr.Slider(minimum=0.0, maximum=1.0, step=.01, value=0.8, label="End") + gr_bias = gr.Slider(minimum=0.0, maximum=1.0, step=.01, value=0.5, label="Bias") + with gr.Column(scale=1, min_width=275): + preview = self.visualize(False, 0.2, 0.8, 0.5, 0.1, 1, 0, 0, 0, True) + gr_vis = gr.Plot(value=preview, elem_classes=['detail-daemon-vis'], show_label=False) + with gr.Accordion("More Knobs:", elem_classes=['detail-daemon-more-accordion'], open=False): + with gr.Row(): + with gr.Column(scale=2): + with gr.Row(): + gr_start_offset_slider = gr.Slider(minimum=-1.00, maximum=1.00, step=.01, value=0.00, label="Start Offset", min_width=60) + gr_end_offset_slider = gr.Slider(minimum=-1.00, maximum=1.00, step=.01, value=0.00, label="End Offset", min_width=60) + with gr.Row(): + gr_exponent = gr.Slider(minimum=0.0, maximum=10.0, step=.05, value=1.0, label="Exponent", min_width=60) + gr_fade = gr.Slider(minimum=0.0, maximum=1.0, step=.05, value=0.0, label="Fade", min_width=60) + # Because the slider max and min are sometimes too limiting: + with gr.Row(): + gr_amount = gr.Number(value=0.10, precision=4, step=.01, label="Amount", min_width=60) + gr_start_offset = gr.Number(value=0.0, precision=4, step=.01, label="Start Offset", min_width=60) + gr_end_offset = gr.Number(value=0.0, precision=4, step=.01, label="End Offset", min_width=60) + with gr.Column(scale=1, min_width=275): + gr_mode = gr.Dropdown(["both", "cond", "uncond"], value="uncond", label="Mode", show_label=True, min_width=60, elem_classes=['detail-daemon-mode']) + gr_smooth = gr.Checkbox(label="Smooth", value=True, min_width=60, elem_classes=['detail-daemon-smooth']) + gr.Markdown("## [Ⓗ Help](https://github.com/muerrilla/sd-webui-detail-daemon)", elem_classes=['detail-daemon-help']) + + gr_amount_slider.release(None, gr_amount_slider, gr_amount, _js="(x) => x") + gr_amount.change(None, gr_amount, gr_amount_slider, _js="(x) => x") + + gr_start_offset_slider.release(None, gr_start_offset_slider, gr_start_offset, _js="(x) => x") + gr_start_offset.change(None, gr_start_offset, gr_start_offset_slider, _js="(x) => x") + + gr_end_offset_slider.release(None, gr_end_offset_slider, gr_end_offset, _js="(x) => x") + gr_end_offset.change(None, gr_end_offset, gr_end_offset_slider, _js="(x) => x") + + vis_args = [gr_enabled, gr_start, gr_end, gr_bias, gr_amount, gr_exponent, gr_start_offset, gr_end_offset, gr_fade, gr_smooth] + for vis_arg in vis_args: + if isinstance(vis_arg, gr.components.Slider): + vis_arg.release(fn=self.visualize, show_progress=False, inputs=vis_args, outputs=[gr_vis]) + else: + vis_arg.change(fn=self.visualize, show_progress=False, inputs=vis_args, outputs=[gr_vis]) + + def extract_infotext(d: dict, key, old_key): + if 'Detail Daemon' in d: + return d['Detail Daemon'].get(key) + return d.get(old_key) + + self.infotext_fields = [ + (gr_enabled, lambda d: True if ('Detail Daemon' in d or 'DD_enabled' in d) else False), + (gr_mode, lambda d: extract_infotext(d, 'mode', 'DD_mode')), + (gr_amount, lambda d: extract_infotext(d, 'amount', 'DD_amount')), + (gr_start, lambda d: extract_infotext(d, 'st', 'DD_start')), + (gr_end, lambda d: extract_infotext(d, 'ed', 'DD_end')), + (gr_bias, lambda d: extract_infotext(d, 'bias', 'DD_bias')), + (gr_exponent, lambda d: extract_infotext(d, 'exp', 'DD_exponent')), + (gr_start_offset, lambda d: extract_infotext(d, 'st_offset', 'DD_start_offset')), + (gr_end_offset, lambda d: extract_infotext(d, 'ed_offset', 'DD_end_offset')), + (gr_fade, lambda d: extract_infotext(d, 'fade', 'DD_fade')), + (gr_smooth, lambda d: extract_infotext(d, 'smooth', 'DD_smooth')), + ] + return [gr_enabled, gr_mode, gr_start, gr_end, gr_bias, gr_amount, gr_exponent, gr_start_offset, gr_end_offset, gr_fade, gr_smooth] + + def process(self, p, enabled, mode, start, end, bias, amount, exponent, start_offset, end_offset, fade, smooth): + + enabled = getattr(p, "DD_enabled", enabled) + mode = getattr(p, "DD_mode", mode) + amount = getattr(p, "DD_amount", amount) + start = getattr(p, "DD_start", start) + end = getattr(p, "DD_end", end) + bias = getattr(p, "DD_bias", bias) + exponent = getattr(p, "DD_exponent", exponent) + start_offset = getattr(p, "DD_start_offset", start_offset) + end_offset = getattr(p, "DD_end_offset", end_offset) + fade = getattr(p, "DD_fade", fade) + smooth = getattr(p, "DD_smooth", smooth) + + if enabled: + if p.sampler_name == "DPM adaptive": + tqdm.write(f'\033[33mWARNING:\033[0m Detail Daemon does not work with {p.sampler_name}') + return + # Restart can be handled better, later maybe + + actual_steps = (p.steps * 2 - 1) if p.sampler_name in ['DPM++ SDE', 'DPM++ 2S a', 'Heun', 'DPM2', 'DPM2 a', 'Restart'] else p.steps + self.schedule = self.make_schedule(actual_steps, start, end, bias, amount, exponent, start_offset, end_offset, fade, smooth) + self.mode = mode + self.cfg_scale = p.cfg_scale + self.batch_size = p.batch_size + on_cfg_denoiser(self.denoiser_callback) + self.callback_added = True + p.extra_generation_params['Detail Daemon'] = f'mode:{mode},amount:{amount},st:{start},ed:{end},bias:{bias},exp:{exponent},st_offset:{start_offset},ed_offset:{end_offset},fade:{fade},smooth:{1 if smooth else 0}' + tqdm.write('\033[32mINFO:\033[0m Detail Daemon is enabled') + else: + if hasattr(self, 'callback_added'): + remove_callbacks_for_function(self.denoiser_callback) + delattr(self, 'callback_added') + # tqdm.write('\033[90mINFO: Detail Daemon callback removed\033[0m') + + def before_process_batch(self, p, *args, **kwargs): + self.is_hires = False + + def postprocess(self, p, processed, *args): + if hasattr(self, 'callback_added'): + remove_callbacks_for_function(self.denoiser_callback) + delattr(self, 'callback_added') + # tqdm.write('\033[90mINFO: Detail Daemon callback removed\033[0m') + + def before_hr(self, p, *args): + self.is_hires = True + enabled = args[0] + if enabled: + tqdm.write(f'\033[33mINFO:\033[0m Detail Daemon does not work during Hires Fix') + + def denoiser_callback(self, params): + if self.is_hires: + return + idx = params.denoiser.step + multiplier = self.schedule[idx] * .1 + mode = self.mode + if params.sigma.size(0) == 1: + mode = "both" + if idx == 0: + tqdm.write(f'\033[33mWARNING:\033[0m Forge does not support `cond` and `uncond` modes, using `both` instead') + if mode == "cond": + for i in range(self.batch_size): + params.sigma[i] *= 1 - multiplier + elif mode == "uncond": + for i in range(self.batch_size): + params.sigma[self.batch_size + i] *= 1 + multiplier + else: + params.sigma *= 1 - multiplier * self.cfg_scale + + def make_schedule(self, steps, start, end, bias, amount, exponent, start_offset, end_offset, fade, smooth): + start = min(start, end) + mid = start + bias * (end - start) + multipliers = np.zeros(steps) + + start_idx, mid_idx, end_idx = [int(round(x * (steps - 1))) for x in [start, mid, end]] + + start_values = np.linspace(0, 1, mid_idx - start_idx + 1) + if smooth: + start_values = 0.5 * (1 - np.cos(start_values * np.pi)) + start_values = start_values ** exponent + if start_values.any(): + start_values *= (amount - start_offset) + start_values += start_offset + + end_values = np.linspace(1, 0, end_idx - mid_idx + 1) + if smooth: + end_values = 0.5 * (1 - np.cos(end_values * np.pi)) + end_values = end_values ** exponent + if end_values.any(): + end_values *= (amount - end_offset) + end_values += end_offset + + multipliers[start_idx:mid_idx+1] = start_values + multipliers[mid_idx:end_idx+1] = end_values + multipliers[:start_idx] = start_offset + multipliers[end_idx+1:] = end_offset + multipliers *= 1 - fade + + return multipliers + + def visualize(self, enabled, start, end, bias, amount, exponent, start_offset, end_offset, fade, smooth): + try: + steps = 50 + values = self.make_schedule(steps, start, end, bias, amount, exponent, start_offset, end_offset, fade, smooth) + mean = sum(values)/steps + peak = np.clip(max(abs(values)), -1, 1) + if start > end: + start = end + mid = start + bias * (end - start) + opacity = .1 + (1 - fade) * 0.7 + plot_color = (0.5, 0.5, 0.5, opacity) if not enabled else ((1 - peak)**2, 1, 0, opacity) if mean >= 0 else (1, (1 - peak)**2, 0, opacity) + plt.rcParams.update({ + "text.color": plot_color, + "axes.labelcolor": plot_color, + "axes.edgecolor": plot_color, + "figure.facecolor": (0.0, 0.0, 0.0, 0.0), + "axes.facecolor": (0.0, 0.0, 0.0, 0.0), + "ytick.labelsize": 6, + "ytick.labelcolor": plot_color, + "ytick.color": plot_color, + }) + fig, ax = plt.subplots(figsize=(2.15, 2.00), layout="constrained") + ax.plot(range(steps), values, color=plot_color) + ax.axhline(y=0, color=plot_color, linestyle='dotted') + ax.axvline(x=mid * (steps - 1), color=plot_color, linestyle='dotted') + ax.tick_params(right=False, color=plot_color) + ax.set_xticks([i * (steps - 1) / 10 for i in range(10)][1:]) + ax.set_xticklabels([]) + ax.set_ylim([-1, 1]) + ax.set_xlim([0, steps-1]) + plt.close() + self.last_vis = fig + return fig + except Exception: + if self.last_vis is not None: + return self.last_vis + return + + +def xyz_support(): + for scriptDataTuple in scripts.scripts_data: + if os.path.basename(scriptDataTuple.path) == 'xyz_grid.py': + xy_grid = scriptDataTuple.module + + def confirm_mode(p, xs): + for x in xs: + if x not in ['both', 'cond', 'uncond']: + raise RuntimeError(f'Invalid Detail Daemon Mode: {x}') + mode = xy_grid.AxisOption( + '[Detail Daemon] Mode', + str, + xy_grid.apply_field('DD_mode'), + confirm=confirm_mode + ) + amount = xy_grid.AxisOption( + '[Detail Daemon] Amount', + float, + xy_grid.apply_field('DD_amount') + ) + start = xy_grid.AxisOption( + '[Detail Daemon] Start', + float, + xy_grid.apply_field('DD_start') + ) + end = xy_grid.AxisOption( + '[Detail Daemon] End', + float, + xy_grid.apply_field('DD_end') + ) + bias = xy_grid.AxisOption( + '[Detail Daemon] Bias', + float, + xy_grid.apply_field('DD_bias') + ) + exponent = xy_grid.AxisOption( + '[Detail Daemon] Exponent', + float, + xy_grid.apply_field('DD_exponent') + ) + start_offset = xy_grid.AxisOption( + '[Detail Daemon] Start Offset', + float, + xy_grid.apply_field('DD_start_offset') + ) + end_offset = xy_grid.AxisOption( + '[Detail Daemon] End Offset', + float, + xy_grid.apply_field('DD_end_offset') + ) + fade = xy_grid.AxisOption( + '[Detail Daemon] Fade', + float, + xy_grid.apply_field('DD_fade') + ) + xy_grid.axis_options.extend([ + mode, + amount, + start, + end, + bias, + exponent, + start_offset, + end_offset, + fade, + ]) + + +try: + xyz_support() +except Exception as e: + print(f'Error trying to add XYZ plot options for Detail Daemon', e) diff --git a/extensions/CHECK/sd-webui-detail-daemon/style.css b/extensions/CHECK/sd-webui-detail-daemon/style.css new file mode 100644 index 0000000000000000000000000000000000000000..b91d21367b3cea8a3f82a47dca2dc8ed8a94bf12 --- /dev/null +++ b/extensions/CHECK/sd-webui-detail-daemon/style.css @@ -0,0 +1,20 @@ +.detail-daemon-more-accordion { + margin-top: 1em !important; +} + +.detail-daemon-mode { + margin-left: 3em !important; + width: 75% !important; +} + +.detail-daemon-smooth { + margin-left: 3em !important; +} + +.detail-daemon-vis { + margin: auto !important; +} + +.detail-daemon-help { + margin: auto 1.5em !important; +} diff --git a/extensions/CHECK/sd-webui-diffusion-cg/.gitignore b/extensions/CHECK/sd-webui-diffusion-cg/.gitignore new file mode 100644 index 0000000000000000000000000000000000000000..bee8a64b79a99590d5303307144172cfe824fbf7 --- /dev/null +++ b/extensions/CHECK/sd-webui-diffusion-cg/.gitignore @@ -0,0 +1 @@ +__pycache__ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/CHANGELOG.md b/extensions/CHECK/sd-webui-diffusion-cg/CHANGELOG.md new file mode 100644 index 0000000000000000000000000000000000000000..b1d22ca3ef866d6dc4ba380d10e48ce509b237d7 --- /dev/null +++ b/extensions/CHECK/sd-webui-diffusion-cg/CHANGELOG.md @@ -0,0 +1,44 @@ +### v1.1.0 - 2024 May.06 +- Add **X/Y/Z Plot** Support + +### v1.0.0 - 2024 Mar.07 +- Extension "**Released**" + +### v0.5.0 - 2024 Jan.09 +- Add **Infotext** + +### v0.4.2 - 2023 Dec.19 +- Optimization via `.detach()` + +### v0.4.1 - 2023 Dec.11 +- Update **Normalization** Logic + +### v0.4.0 - 2023 Dec.08 +- Implement Color **Parameters** + +### v0.3.0 - 2023 Dec.01 +- Add **Default** Settings + +### v0.2.3 - 2023 Dec.01 +- **Clarify** README + +### v0.2.2 - 2023 Nov.25 +- No longer process if a **Mask** exists + +### v0.2.1 - 2023 Nov.23 +- Add **Effect Strength** Settings + +### v0.2.0 - 2023 Nov.21 +- Better **SDXL** Support + +### v0.1.3 - 2023 Nov.20 +- Improved **Compatibility** +- +### v0.1.2 - 2023 Nov.20 +- Improved(?) **Normalization** + +### v0.1.1 - 2023 Nov.20 +- Improved(?) **Normalization** + +### v0.1.0 - 2023 Nov.16 +- Public **Alpha** Released~ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/LICENSE b/extensions/CHECK/sd-webui-diffusion-cg/LICENSE new file mode 100644 index 0000000000000000000000000000000000000000..91b74bef797843ad1245014dc2865ff6cd4ac688 --- /dev/null +++ b/extensions/CHECK/sd-webui-diffusion-cg/LICENSE @@ -0,0 +1,21 @@ +MIT License + +Copyright (c) 2024 Haoming + +Permission is hereby granted, free of charge, to any person obtaining a copy +of this software and associated documentation files (the "Software"), to deal +in the Software without restriction, including without limitation the rights +to use, copy, modify, merge, publish, distribute, sublicense, and/or sell +copies of the Software, and to permit persons to whom the Software is +furnished to do so, subject to the following conditions: + +The above copyright notice and this permission notice shall be included in all +copies or substantial portions of the Software. + +THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR +IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, +FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE +AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER +LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, +OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE +SOFTWARE. diff --git a/extensions/CHECK/sd-webui-diffusion-cg/README.md b/extensions/CHECK/sd-webui-diffusion-cg/README.md new file mode 100644 index 0000000000000000000000000000000000000000..5f48e45f5bdbf112b33bb4fa70053a0d2451db6c --- /dev/null +++ b/extensions/CHECK/sd-webui-diffusion-cg/README.md @@ -0,0 +1,93 @@ +# SD Webui Diffusion Color Grading +This is an Extension for the [Automatic1111 Webui](https://github.com/AUTOMATIC1111/stable-diffusion-webui), which performs *Color Grading* during the generation, +producing a more **neutral** and **balanced**, but also **vibrant** and **contrasty** color. + +> This is the fruition of the joint research between [TimothyAlexisVass](https://github.com/TimothyAlexisVass) with their findings, and me with my experience in developing [Vectorscope CC](https://github.com/Haoming02/sd-webui-vectorscope-cc) + +**Note:** This Extension is disabled during [ADetailer](https://github.com/Bing-su/adetailer) phase to prevent inconsistent colors + +This Extension comes with two main features, **Recenter** and **Normalization**: + +### Recenter + +
Abstract
+ +TimothyAlexisVass discovered that, the value of the latent noise Tensor often starts off-centered, and the mean of each channel tends to drift away from `0`. +Therefore, I tried to write an Extension to guide the mean back to `0`. For **SDXL**, pushing the mean of each channel to `0` yields decent results. + +But for **SD 1.5**, I found out that for some Checkpoints this often produces a green tint, suggesting that the "center" of each channel might not necessarily be at `0`. +After experimenting with hundreds of images, I located a set of values for a rather **neutral and balanced** tone. + +Effects
+ +When you enable the feature, the output images will not have a biased color tint, and all colors will distribute more evenly; +Additionally, the brightness will be adjusted so that bright areas are not overblown and dark areas are not clipped, +producing a similar effect like the HDR photos taken by smartphones. + +Samples
+ +
+ +
+ +
+Off | On
+
+ +
+ +
+Off | On
+
Abstract
+ +By encoding images into latent noise with VAE, TimothyAlexisVass discovered that the values for VAE to decode are usually within a certain range, +and thus theorized that if the final latent noise has a smaller value range, then some precision is essentailly wasted. +This gave me an idea to write a function that can make the latent noise utilize the full color depth, +making the final output more **vibrant** and **contrasty**. + +Effects
+ +When you enable the feature, the latent noise will attempt to span across the value ranges if possible, before getting decoded by the VAE. +As a result, bright areas will get brighter and dark areas will get darker; Additional details may also be introduced in these areas. + +> This feature is currently disabled during Hires. fix pass + +### Combined +You can also enable both features at the same time, thus creating some really stunning results! + +
+ +
+
+ +
+ +
+
+ +
+ +
+Off | On
+
+ +## Stable Diffusion Structures +The `Tensor` of the latent noise has a dimention of `[batch, 4, height / 8, width / 8]`. +- For **SD 1.5:** From my trial and error when developing [Vectorscope CC](https://github.com/Haoming02/sd-webui-vectorscope-cc), each of the 4 channels essentially represents the `-K`, `-M`, `C`, `Y` color for the **CMYK** color model. +- For **SDXL:** According to TimothyAlexisVass's [Blogpost](https://huggingface.co/blog/TimothyAlexisVass/explaining-the-sdxl-latent-space), the first 3 channels are similar to **YCbCr** color model, while the 4th channel is the pattern/structure. diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/c_a_off.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_a_off.jpg new file mode 100644 index 0000000000000000000000000000000000000000..998af4cf2a5538797ea47d15dbf405ee219d6081 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_a_off.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/c_a_on.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_a_on.jpg new file mode 100644 index 0000000000000000000000000000000000000000..91481a9f54c322a6940c16184249d6f8bcb236ca Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_a_on.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/c_r_off.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_r_off.jpg new file mode 100644 index 0000000000000000000000000000000000000000..4a33daab58672b9484acd077de4334c55b2bc422 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_r_off.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/c_r_on.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_r_on.jpg new file mode 100644 index 0000000000000000000000000000000000000000..d63e0273021875576d2903cea1e1a8f5f999d2fc Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/c_r_on.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_off_1.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_off_1.jpg new file mode 100644 index 0000000000000000000000000000000000000000..9fa2d914afafb08d3558f5f39546e875a0a4fd20 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_off_1.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_off_2.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_off_2.jpg new file mode 100644 index 0000000000000000000000000000000000000000..6451d17792804b1c7ac3b0e985050fc31e0b20b0 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_off_2.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_on_1.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_on_1.jpg new file mode 100644 index 0000000000000000000000000000000000000000..0b2565f26d2c4848bef06c60240c2975e6591c63 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_on_1.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_on_2.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_on_2.jpg new file mode 100644 index 0000000000000000000000000000000000000000..f97d38f323e4689d0437486f5109a271fac614b3 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/cn_xl_on_2.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/samples/cna.jpg b/extensions/CHECK/sd-webui-diffusion-cg/samples/cna.jpg new file mode 100644 index 0000000000000000000000000000000000000000..431bb7cb622171ccc0faf3970cc2aaedf2a1dc16 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/samples/cna.jpg differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/cg_settings.cpython-310.pyc b/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/cg_settings.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..0186941d76c4fc5514e86fa2d1c0a4104bdbf55a Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/cg_settings.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/cg_xyz.cpython-310.pyc b/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/cg_xyz.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..419d8f2cb9c6ce4ce264f5764669529e8c2ae7e7 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/cg_xyz.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/diffusion_cg.cpython-310.pyc b/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/diffusion_cg.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..a12576a306357637226f9312226137d9d8fe8c42 Binary files /dev/null and b/extensions/CHECK/sd-webui-diffusion-cg/scripts/__pycache__/diffusion_cg.cpython-310.pyc differ diff --git a/extensions/CHECK/sd-webui-diffusion-cg/scripts/cg_settings.py b/extensions/CHECK/sd-webui-diffusion-cg/scripts/cg_settings.py new file mode 100644 index 0000000000000000000000000000000000000000..e64fb22fcc29c1d94f9200a005f08bd185bc4a30 --- /dev/null +++ b/extensions/CHECK/sd-webui-diffusion-cg/scripts/cg_settings.py @@ -0,0 +1,12 @@ +from modules import script_callbacks, shared +import gradio as gr + +Section = ('diffusion_cg', "Diffusion CG") + +def on_ui_settings(): + shared.opts.add_option("always_center", shared.OptionInfo("None", "Always Perform Recenter on:", gr.Radio, lambda: {"choices": ["None", "txt2img", "img2img", "Both"]}, section=Section).needs_reload_ui()) + shared.opts.add_option("always_normalize", shared.OptionInfo("None", "Always Perform Normalization on:", gr.Radio, lambda: {"choices": ["None", "txt2img", "img2img", "Both"]}, section=Section).needs_reload_ui()) + shared.opts.add_option("default_arch", shared.OptionInfo("1.5", "Default Stable Diffusion Version", gr.Radio, lambda: {"choices": ["1.5", "XL"]}, section=Section).needs_reload_ui()) + shared.opts.add_option("show_center_opt", shared.OptionInfo(False, "[Advanced] Show ReCenter Settings", section=Section).needs_reload_ui()) + +script_callbacks.on_ui_settings(on_ui_settings) diff --git a/extensions/CHECK/sd-webui-diffusion-cg/scripts/cg_xyz.py b/extensions/CHECK/sd-webui-diffusion-cg/scripts/cg_xyz.py new file mode 100644 index 0000000000000000000000000000000000000000..d8096bed31859e7a0beb5f6a8bc2789ef4da4f62 --- /dev/null +++ b/extensions/CHECK/sd-webui-diffusion-cg/scripts/cg_xyz.py @@ -0,0 +1,51 @@ +from modules import shared, scripts + + +def grid_reference(): + for data in scripts.scripts_data: + if data.script_class.__module__ in ( + "scripts.xyz_grid", + "xyz_grid.py", + ) and hasattr(data, "module"): + return data.module + + raise SystemError("Could not find X/Y/Z Plot...") + + +def xyz_support(cache: dict): + xyz_grid = grid_reference() + + def apply_field(field): + def _(p, x, xs): + cache.update({field: x}) + + return _ + + def choices_bool(): + return ["False", "True"] + + extra_axis_options = [ + xyz_grid.AxisOption( + "[Diff. CG] Enable", str, apply_field("enableG"), choices=choices_bool + ), + xyz_grid.AxisOption("[Diff. CG] ReCenter", float, apply_field("rc_str")), + xyz_grid.AxisOption( + "[Diff. CG] Normalization", + str, + apply_field("enableN"), + choices=choices_bool, + ), + ] + + if getattr(shared.opts, "show_center_opt", False): + extra_axis_options += [ + xyz_grid.AxisOption("[Diff. CG] C", float, apply_field("C")), + xyz_grid.AxisOption("[Diff. CG] M", float, apply_field("M")), + xyz_grid.AxisOption("[Diff. CG] Y", float, apply_field("Y")), + xyz_grid.AxisOption("[Diff. CG] K", float, apply_field("K")), + xyz_grid.AxisOption("[Diff. CG] L", float, apply_field("L")), + xyz_grid.AxisOption("[Diff. CG] a", float, apply_field("a")), + xyz_grid.AxisOption("[Diff. CG] b", float, apply_field("b")), + ] + + xyz_grid.axis_options.extend(extra_axis_options) diff --git a/extensions/CHECK/sd-webui-diffusion-cg/scripts/diffusion_cg.py b/extensions/CHECK/sd-webui-diffusion-cg/scripts/diffusion_cg.py new file mode 100644 index 0000000000000000000000000000000000000000..21a951f4334c42edf8da1aaf13565efd415834c9 --- /dev/null +++ b/extensions/CHECK/sd-webui-diffusion-cg/scripts/diffusion_cg.py @@ -0,0 +1,384 @@ +from modules.sd_samplers_kdiffusion import KDiffusionSampler +from modules import shared, scripts, script_callbacks +import gradio as gr + +from scripts.cg_xyz import xyz_support + +VERSION = "v1.1.0" + +DYNAMIC_RANGE = [3.25, 2.5, 2.5, 2.5] + +Default_LUTs = {"C": 0.01, "M": 0.5, "Y": -0.13, "K": 0} + + +def normalize_tensor(x, r): + X = x.detach().clone() + + ratio = r / max(abs(float(X.min())), abs(float(X.max()))) + X *= max(ratio, 0.99) + + return X + + +original_callback = KDiffusionSampler.callback_state + + +def center_callback(self, d): + if not self.diffcg_enable or getattr(self.p, "_ad_inner", False): + return original_callback(self, d) + + X = d["denoised"].detach().clone() + batchSize = X.size(0) + channels = len(self.LUTs) + + for b in range(batchSize): + for c in range(channels): + + if self.diffcg_recenter_strength > 0.0: + d["denoised"][b][c] += ( + self.LUTs[c] - X[b][c].mean() + ) * self.diffcg_recenter_strength + + if self.diffcg_normalize and (d["i"] + 1) > self.diffcg_last_step // 2: + d["denoised"][b][c] = normalize_tensor(X[b][c], DYNAMIC_RANGE[c]) + + return original_callback(self, d) + + +KDiffusionSampler.callback_state = center_callback + + +# ["None", "txt2img", "img2img", "Both"] +ac = getattr(shared.opts, "always_center", "None") +an = getattr(shared.opts, "always_normalize", "None") +def_sd = getattr(shared.opts, "default_arch", "1.5") +adv_opt = getattr(shared.opts, "show_center_opt", False) + +c_t2i = ac in ("txt2img", "Both") +c_i2i = ac in ("img2img", "Both") +n_t2i = an in ("txt2img", "Both") +n_i2i = an in ("img2img", "Both") + + +class DiffusionCG(scripts.Script): + def __init__(self): + self.xyzCache = {} + xyz_support(self.xyzCache) + + def title(self): + return "DiffusionCG" + + def show(self, is_img2img): + return scripts.AlwaysVisible + + def ui(self, is_img2img): + with gr.Accordion(f"Diffusion CG {VERSION}", open=False): + with gr.Row(): + enableG = gr.Checkbox( + label="Enable (Global)", + value=( + ((not is_img2img) and (c_t2i or n_t2i)) + or (is_img2img and (c_i2i or n_i2i)) + ), + ) + sd_ver = gr.Radio( + ["1.5", "XL"], value=def_sd, label="Stable Diffusion Version" + ) + + with gr.Row(): + with gr.Group(): + gr.Markdown('
Recenter
') + + if not is_img2img: + v = 1.0 if c_t2i else 0.0 + else: + v = 1.0 if c_i2i else 0.0 + + rc_str = gr.Slider( + label="Effect Strength", + minimum=0.0, + maximum=1.0, + step=0.2, + value=v, + ) + + with gr.Group(): + gr.Markdown('Normalization
') + enableN = gr.Checkbox( + label="Activate", + value=(((not is_img2img) and n_t2i) or (is_img2img and n_i2i)), + ) + + with gr.Accordion("Recenter Settings", visible=adv_opt, open=False): + with gr.Group(visible=(def_sd == "1.5")) as setting15: + C = gr.Slider( + label="C", + minimum=-1.00, + maximum=1.00, + step=0.01, + value=Default_LUTs["C"], + ) + M = gr.Slider( + label="M", + minimum=-1.00, + maximum=1.00, + step=0.01, + value=Default_LUTs["M"], + ) + Y = gr.Slider( + label="Y", + minimum=-1.00, + maximum=1.00, + step=0.01, + value=Default_LUTs["Y"], + ) + K = gr.Slider( + label="K", + minimum=-1.00, + maximum=1.00, + step=0.01, + value=Default_LUTs["K"], + ) + + with gr.Group(visible=(def_sd == "XL")) as settingXL: + L = gr.Slider( + label="L", minimum=-1.00, maximum=1.00, step=0.01, value=0.0 + ) + a = gr.Slider( + label="a", minimum=-1.00, maximum=1.00, step=0.01, value=0.0 + ) + b = gr.Slider( + label="b", minimum=-1.00, maximum=1.00, step=0.01, value=0.0 + ) + + def on_radio_change(choice): + if choice == "1.5": + return [ + gr.Group.update(visible=True), + gr.Group.update(visible=False), + ] + else: + return [ + gr.Group.update(visible=False), + gr.Group.update(visible=True), + ] + + sd_ver.change(on_radio_change, sd_ver, [setting15, settingXL]) + + self.paste_field_names = [ + (rc_str, "ReCenter Str"), + (enableN, "Normalization"), + (sd_ver, "SD_ver"), + ] + self.infotext_fields = [ + (rc_str, "ReCenter Str"), + (enableN, "Normalization"), + (sd_ver, "SD_ver"), + ] + + if adv_opt: + self.paste_field_names += [ + ( + C, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[0]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + M, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[1]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + Y, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[2]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + K, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[3]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + L, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[0]) + if len(d.get("LUTs", "").split(",")) == 3 + else gr.update() + ), + ), + ( + a, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[1]) + if len(d.get("LUTs", "").split(",")) == 3 + else gr.update() + ), + ), + ( + b, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[2]) + if len(d.get("LUTs", "").split(",")) == 3 + else gr.update() + ), + ), + ] + self.infotext_fields += [ + ( + C, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[0]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + M, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[1]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + Y, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[2]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + K, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[3]) + if len(d.get("LUTs", "").split(",")) == 4 + else gr.update() + ), + ), + ( + L, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[0]) + if len(d.get("LUTs", "").split(",")) == 3 + else gr.update() + ), + ), + ( + a, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[1]) + if len(d.get("LUTs", "").split(",")) == 3 + else gr.update() + ), + ), + ( + b, + lambda d: ( + float(d["LUTs"].strip("[]").split(",")[2]) + if len(d.get("LUTs", "").split(",")) == 3 + else gr.update() + ), + ), + ] + + for comp in [enableG, sd_ver, rc_str, enableN, C, M, Y, K, L, a, b]: + comp.do_not_save_to_config = True + + return [enableG, sd_ver, rc_str, enableN, C, M, Y, K, L, a, b] + + def before_hr(self, p, *args): + KDiffusionSampler.diffcg_normalize = False + + def process( + self, + p, + enableG: bool, + sd_ver: str, + rc_str: float, + enableN: bool, + C: float, + M: float, + Y: float, + K: float, + L: float, + a: float, + b: float, + ): + + if "enableG" in self.xyzCache.keys(): + enableG = self.xyzCache["enableG"].lower().strip() == "true" + del self.xyzCache["enableG"] + + KDiffusionSampler.diffcg_enable = enableG + if not enableG: + if len(self.xyzCache.keys()) > 0: + print("\n[Diff. CG] X [X/Y/Z Plot] Extension is not Enabled!\n") + self.xyzCache.clear() + return p + + if "rc_str" in self.xyzCache.keys(): + rc_str = float(self.xyzCache["rc_str"]) + if "enableN" in self.xyzCache.keys(): + enableN = self.xyzCache["enableN"].lower().strip() == "true" + + if adv_opt: + C = self.xyzCache.get("C", C) + M = self.xyzCache.get("M", M) + Y = self.xyzCache.get("Y", Y) + K = self.xyzCache.get("K", K) + L = self.xyzCache.get("L", L) + a = self.xyzCache.get("a", a) + b = self.xyzCache.get("b", b) + + if sd_ver == "1.5": + KDiffusionSampler.LUTs = [-K, -M, C, Y] + else: + KDiffusionSampler.LUTs = [L, -a, b] + + KDiffusionSampler.diffcg_recenter_strength = rc_str + KDiffusionSampler.diffcg_normalize = enableN + + if ( + not hasattr(p, "enable_hr") + and not shared.opts.img2img_fix_steps + and getattr(p, "denoising_strength", 1.0) < 1.0 + ): + KDiffusionSampler.diffcg_last_step = int(p.steps * p.denoising_strength) + 1 + else: + KDiffusionSampler.diffcg_last_step = p.steps + + p.extra_generation_params.update( + { + "ReCenter Str": rc_str, + "Normalization": enableN, + "SD_ver": sd_ver, + } + ) + + if adv_opt: + if def_sd == "1.5": + p.extra_generation_params["LUTs"] = f"[{C}, {M}, {Y}, {K}]" + else: + p.extra_generation_params["LUTs"] = f"[{L}, {a}, {b}]" + + self.xyzCache.clear() + + +def restore_callback(): + KDiffusionSampler.callback_state = original_callback + + +script_callbacks.on_script_unloaded(restore_callback) diff --git a/extensions/CHECK/sd-webui-fabric/.gitignore b/extensions/CHECK/sd-webui-fabric/.gitignore new file mode 100644 index 0000000000000000000000000000000000000000..98fd9f005983a482e628d5a7e37c65b4485f8e6b --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/.gitignore @@ -0,0 +1,162 @@ +.DS_Store + +# Byte-compiled / optimized / DLL files +__pycache__/ +*.py[cod] +*$py.class + +# C extensions +*.so + +# Distribution / packaging +.Python +build/ +develop-eggs/ +dist/ +downloads/ +eggs/ +.eggs/ +lib/ +lib64/ +parts/ +sdist/ +var/ +wheels/ +share/python-wheels/ +*.egg-info/ +.installed.cfg +*.egg +MANIFEST + +# PyInstaller +# Usually these files are written by a python script from a template +# before PyInstaller builds the exe, so as to inject date/other infos into it. +*.manifest +*.spec + +# Installer logs +pip-log.txt +pip-delete-this-directory.txt + +# Unit test / coverage reports +htmlcov/ +.tox/ +.nox/ +.coverage +.coverage.* +.cache +nosetests.xml +coverage.xml +*.cover +*.py,cover +.hypothesis/ +.pytest_cache/ +cover/ + +# Translations +*.mo +*.pot + +# Django stuff: +*.log +local_settings.py +db.sqlite3 +db.sqlite3-journal + +# Flask stuff: +instance/ +.webassets-cache + +# Scrapy stuff: +.scrapy + +# Sphinx documentation +docs/_build/ + +# PyBuilder +.pybuilder/ +target/ + +# Jupyter Notebook +.ipynb_checkpoints + +# IPython +profile_default/ +ipython_config.py + +# pyenv +# For a library or package, you might want to ignore these files since the code is +# intended to run in multiple environments; otherwise, check them in: +# .python-version + +# pipenv +# According to pypa/pipenv#598, it is recommended to include Pipfile.lock in version control. +# However, in case of collaboration, if having platform-specific dependencies or dependencies +# having no cross-platform support, pipenv may install dependencies that don't work, or not +# install all needed dependencies. +#Pipfile.lock + +# poetry +# Similar to Pipfile.lock, it is generally recommended to include poetry.lock in version control. +# This is especially recommended for binary packages to ensure reproducibility, and is more +# commonly ignored for libraries. +# https://python-poetry.org/docs/basic-usage/#commit-your-poetrylock-file-to-version-control +#poetry.lock + +# pdm +# Similar to Pipfile.lock, it is generally recommended to include pdm.lock in version control. +#pdm.lock +# pdm stores project-wide configurations in .pdm.toml, but it is recommended to not include it +# in version control. +# https://pdm.fming.dev/#use-with-ide +.pdm.toml + +# PEP 582; used by e.g. github.com/David-OConnor/pyflow and github.com/pdm-project/pdm +__pypackages__/ + +# Celery stuff +celerybeat-schedule +celerybeat.pid + +# SageMath parsed files +*.sage.py + +# Environments +.env +.venv +env/ +venv/ +ENV/ +env.bak/ +venv.bak/ + +# Spyder project settings +.spyderproject +.spyproject + +# Rope project settings +.ropeproject + +# mkdocs documentation +/site + +# mypy +.mypy_cache/ +.dmypy.json +dmypy.json + +# Pyre type checker +.pyre/ + +# pytype static type analyzer +.pytype/ + +# Cython debug symbols +cython_debug/ + +# PyCharm +# JetBrains specific template is maintained in a separate JetBrains.gitignore that can +# be found at https://github.com/github/gitignore/blob/main/Global/JetBrains.gitignore +# and can be added to the global gitignore or merged into this file. For a more nuclear +# option (not recommended) you can uncomment the following to ignore the entire idea folder. +#.idea/ diff --git a/extensions/CHECK/sd-webui-fabric/LICENSE b/extensions/CHECK/sd-webui-fabric/LICENSE new file mode 100644 index 0000000000000000000000000000000000000000..76e2c7de91cfec0f16447d30b0d25518688b01a0 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/LICENSE @@ -0,0 +1,21 @@ +MIT License + +Copyright (c) 2023 Dimitri von Rütte + +Permission is hereby granted, free of charge, to any person obtaining a copy +of this software and associated documentation files (the "Software"), to deal +in the Software without restriction, including without limitation the rights +to use, copy, modify, merge, publish, distribute, sublicense, and/or sell +copies of the Software, and to permit persons to whom the Software is +furnished to do so, subject to the following conditions: + +The above copyright notice and this permission notice shall be included in all +copies or substantial portions of the Software. + +THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR +IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, +FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE +AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER +LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, +OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE +SOFTWARE. diff --git a/extensions/CHECK/sd-webui-fabric/README.md b/extensions/CHECK/sd-webui-fabric/README.md new file mode 100644 index 0000000000000000000000000000000000000000..005b68193371a73fcbacd20403a204b0139970a6 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/README.md @@ -0,0 +1,127 @@ +# FABRIC Plugin for Stable Diffusion WebUI + +Official FABRIC implementation for [automatic1111/stable-diffusion-webui](https://github.com/AUTOMATIC1111/stable-diffusion-webui). Steer the model towards generating desirable results by simply liking/disliking images. These feedback images can be generated or provided by you and will make the model generate images that look more/less like the feedback. Instead of meticulously iterating on your prompt until you get what you're looking for, with FABRIC you can simply "show" the model what you want and don't want. + +📜 Paper: https://arxiv.org/abs/2307.10159 + +🎨 Project page: https://sd-fabric.github.io + +ComfyUI node (by [@ssitu](https://github.com/ssitu)): https://github.com/ssitu/ComfyUI_fabric + + + +## Releases and Changelog +- [09.03.2024] 🛡️ v0.6.6: Adds "burnout protection", which helps prevent low-quality results when a large number of feedback images is used. +- [07.03.2024] 🔨 v0.6.5: Fixes compatibility with [WebUI Forge](https://github.com/lllyasviel/stable-diffusion-webui-forge). +- [07.03.2024] ✨ v0.6.4: SDXL support has been added. For optimal results, lowering the feedback strength is recommended (0.5 seems to be a good starting point). +- [29.08.2023] 🏎️ v0.6.0: Up to 2x faster and 4x less VRAM usage thanks to [Token Merging](https://github.com/dbolya/tomesd/tree/main) (tested with 16 feedback images and a batch size of 4), moderate gains for fewer feedback images (10% speedup for 2 images, 30% for 8 images). Enable the Token Merging option to take advantage of this. +- [22.08.2023] 🗃️ v0.5.0: Adds support for presets. Makes generated images using FABRIC more reproducible by loading the correct (previously used) feedback images when using "send to text2img/img2img". + +## Installation + +1. Open the "Extensions" tab +2. Open the "Install from URL" tab +3. Copy-paste `https://github.com/dvruette/sd-webui-fabric.git` into "URL for extension's git repository" and press "Install" +4. Switch to the "Installed" tab and press "Apply and restart UI" +5. (optional) Since FABRIC is quite VRAM intensive, using `--xformers` is recommended. + 1. If you still run out of VRAM, try enabling the "Token Merging" setting for even better memory efficiency. + +### Compatibility Notes +- FABRIC is compatible with SD 1.5, SDXL and WebUI Forge +- The plugin is INCOMPATIBLE with `reference` mode in the ControlNet plugin. Instead of using a reference image, simply add it as a liked image. If you accidentally enable FABRIC and `reference` mode at the same time, you will have to restart the WebUI to fix it. +- Some attention processors are not supported. In particular, `--opt-sub-quad-attention` and `--opt-split-attention-v1` are not supported at the moment. + + + +## How-to and Examples + +### Basic Usage +0. Enable the FABRIC extension +1. Add feedback images: + - select an image from a previous generation and press 👍/👎 in the "Current batch" tab OR + - select the "Upload image" tab, upload an image of your preference and press 👍/👎 +2. Press "Generate" to generate a batch of images incorporating the selected feedback +3. Repeat: Add more feedback, optionally adjust your prompt and regenerate + +_Tips:_ +- You don't have to keep using the same prompt that you used to generate feedback images. In fact, adjusting the prompt in conjunction with providing feedback is most powerful. +- While the number of feedback images is only limited by the size of your GPU, using fewer feedback images tends to give better results that clearly reflect both the prompt and feedback. Increasing the number of feedback images can sometimes lead to the model getting confused, giving too much weight to certain feedback images or completely ignoring others. + +#### Feedback Strength + +The feedback strength controls how much the model pays attention to your feedback images. The higher, the more it will try to stay close to the feedback, potentially ignoring certain aspects of the prompt. Lowering this value is recommended if you're using large numbers of feedback images or if you feel like the model sticks too close to the feedback. + +#### Feedback Schedule + +Using `feedback start` and `feedback end` it's possible to control at which denoising steps the model tries to incorporate the feedback. As a rule of thumb, early steps will influence high-level, coarse features (overall composition, large objects in the scene, ...) and later steps will influence fine-grained, low-level features (details, texture, small objects, ...). Adjusting these values makes it possible to only use feedback on certain features in the generation. A value of `0.0` corresponds to the first and `1.0` to the last denoising step (linear interpolation in between). + +Generally, it's recommended to have feedback active from the start but not until the end, but violating these principles can give interesting results in their own right, especially when simultaneously adjusting feedback strength. + +#### Token Merging + +Token merging (ToMe) is an optimization technique that improves speed and memory usage at the cost of accuracy. Enabling this _will_ change your results, but it can make generation times significantly faster (I observed up to 50%), especially for large resolutions and large numbers of feedback images. + + +### Examples + +#### Style Control using Feedback +Generating images in a certain style, adding them as feedback and dropping the style from the prompt allows retaining certain aspects from the style while retaining flexibility in the prompt: + +| Feedback image | Without feedback | With feedback | +| --- | --- | --- | +|  |  |  | +| picture of a horse riding on top of an astronaut, ukiyo-e | picture of a horse riding on top of an astronaut on the beach | picture of a horse riding on top of an astronaut on the beach | + +Negative prompt: `lowres, bad anatomy, bad hands, cropped, worst quality`; Seed: `1531668169` + +#### Feedback Strength +Feedback strength controls how much the model pays attention to the feedback. This example demonstrates the effect of varying it: + +| Feedback image | | | | +| --- | --- | --- | --- | +|  | | | | +| weight=0.0 | weight=0.2 | weight=0.4 | weight=0.8 | +|  |  |  |  | + +Prompt: `[macro picture of a pineapple, zoomcore:photo of new york at sunrise:0.3], masterpiece, trending on artstation[:, extremely detailed, hyperrealistic, 8k:0.5]`; Negative prompt: `lowres, bad anatomy, bad hands, cropped, worst quality, grayscale`; Seed: `2345285976`; + + +#### Feedback Schedule +By adjusting the feedback schedule, it's possible to control which features are influenced by the feedback. In this example, the feedback is only active between 30% and 60% of the generation, which allows to isolate the effect of the feedback: + +| Feedback image | Without feedback | Default schedule (0.0 - 0.8) | Custom schedule (0.3 - 0.6) | +| --- | --- | --- | --- | +|  |  |  |  | + +Prompt: `a woman with long flowy hair wearing a (dress made of pink flowers:1.1) sitting on a sunny meadow, vibrant`; Negative prompt: `lowres, bad anatomy, bad hands, cropped, worst quality, grayscale, muted colors, monochrome, sepia`; Seed: `2844331335` + + +_All examples were created using the DreamShaper 7 model: https://huggingface.co/Lykon/DreamShaper/tree/main_ + +Advanced Usage
+ + #### Min. strength + Adjusting the minimum feedback strength controls how much feedback is incorporated during the passive phase, outside of the feedback schedule (i.e. when FABRIC is "inactive", before `feedback start` and after `feedback end`). This allows emphasizing the feedback during certain phases (feature scales) of the generation but still incorporating at least some of it from beginning to end. By default this is 0, so feedback is only incorporated during the active phase. + + #### Negative weight + The negative weight controls how much negative feedback is incorporated relative the the positive feedback. We have found that it's generally preferrable to have lower feedback strenth for negative images, which is why by default this value is `0.5`. Increasing this increases the influence of negative feedback (without changin the influence of positive feedback). + + #### ToMe settings + These settings are quite technical and understanding them is not strictly necessary for using them. Merge ratio controls the ratio of tokens that get merged: higher merge ratio -> fewer tokens -> more speed and less memory, but lower quality. Max. tokens limits the number of feedback tokens: fewer tokens -> more speed, less memory, but lower quality. The seed controls which tokens have a chance of being merged and is mainly there for reproducibility purposes. Changing the seed can alter the outcome quite significantly depending on how aggressive the other ToMe settings are. + + More information on ToMe: https://github.com/dbolya/tomesd/tree/main +") + + with FormGroup(): + with FormRow(): + feedback_start = gr.Slider(minimum=0.0, maximum=1.0, step=0.01, value=0.0, label="Feedback start") + feedback_end = gr.Slider(minimum=0.0, maximum=1.0, step=0.01, value=0.8, label="Feedback end") + + feedback_max_weight = gr.Slider(minimum=0.0, maximum=1.0, step=0.05, value=0.8, label="Feedback Strength", elem_id="fabric_max_weight") + tome_enabled = gr.Checkbox(label="Enable Token Merging (faster, less VRAM, less accurate)", value=False) + burnout_protection = gr.Checkbox(label="Burnout protection (enable if results contain artifacts or are especially dark)", value=False) + + with gr.Accordion("Advanced options", open=DEBUG): + with FormGroup(): + feedback_min_weight = gr.Slider(minimum=0, maximum=1, step=0.05, value=0.0, label="Min. strength", info="Minimum feedback strength at every diffusion step.", elem_id="fabric_min_weight") + feedback_neg_scale = gr.Slider(minimum=0.0, maximum=1.0, step=0.05, value=0.5, label="Negative weight", info="Strength of negative feedback relative to positive feedback.", elem_id="fabric_neg_scale") + + tome_ratio = gr.Slider(minimum=0.0, maximum=0.75, step=0.125, value=0.5, label="ToMe merge ratio", info="Percentage of tokens to be merged (higher improves speed)", elem_id="fabric_tome_ratio") + tome_max_tokens = gr.Slider(minimum=4096, maximum=16*4096, step=4096, value=2*4096, label="ToMe max. tokens", info="Maximum number of tokens after merging (lower improves VRAM usage)", elem_id="fabric_tome_max_tokens") + tome_seed = gr.Number(label="ToMe seed", value=-1, step=1, info="Random seed for ToMe partition", elem_id="fabric_tome_seed") + + + + WebUiComponents.on_txt2img_gallery(self.register_txt2img_gallery_select) + WebUiComponents.on_img2img_gallery(self.register_img2img_gallery_select) + + if is_img2img: + like_btn_selected.click(self.add_image_to_state, inputs=[self.img2img_selected_image, liked_paths], outputs=[like_gallery, liked_paths]) + dislike_btn_selected.click(self.add_image_to_state, inputs=[self.img2img_selected_image, disliked_paths], outputs=[dislike_gallery, disliked_paths]) + else: + like_btn_selected.click(self.add_image_to_state, inputs=[self.txt2img_selected_image, liked_paths], outputs=[like_gallery, liked_paths]) + dislike_btn_selected.click(self.add_image_to_state, inputs=[self.txt2img_selected_image, disliked_paths], outputs=[dislike_gallery, disliked_paths]) + + like_btn_uploaded.click(self.add_image_to_state, inputs=[upload_img_input, liked_paths], outputs=[like_gallery, liked_paths]) + dislike_btn_uploaded.click(self.add_image_to_state, inputs=[upload_img_input, disliked_paths], outputs=[dislike_gallery, disliked_paths]) + + clear_liked_btn.click(lambda _: ([], [], []), inputs=[], outputs=[like_gallery, liked_paths]) + clear_disliked_btn.click(lambda _: ([], [], []), inputs=[], outputs=[dislike_gallery, disliked_paths]) + + like_gallery.select( + self.select_for_removal, + _js="(a, b) => [a, fabric_selected_gallery_index('fabric_like_gallery')]", + inputs=[like_gallery, like_gallery], + outputs=[selected_like, remove_selected_like_btn], + ) + + dislike_gallery.select( + self.select_for_removal, + _js="(a, b) => [a, fabric_selected_gallery_index('fabric_dislike_gallery')]", + inputs=[dislike_gallery, dislike_gallery], + outputs=[selected_dislike, remove_selected_dislike_btn], + ) + + remove_selected_like_btn.click( + self.remove_selected, + inputs=[liked_paths, selected_like], + outputs=[like_gallery, liked_paths, selected_like, remove_selected_like_btn], + ) + + remove_selected_dislike_btn.click( + self.remove_selected, + inputs=[disliked_paths, selected_dislike], + outputs=[dislike_gallery, disliked_paths, selected_dislike, remove_selected_dislike_btn], + ) + + save_preset_btn.click( + self.save_preset, + _js="(a, b, c, d) => [a, b, c, prompt('Enter a name for your preset:')]", + inputs=[presets_list, liked_paths, disliked_paths, disliked_paths], # last input is a dummy + outputs=[presets_list], + ) + + presets_list.input( + self.on_preset_selected, + inputs=[presets_list, liked_paths, disliked_paths], + outputs=[ + liked_paths, + disliked_paths, + like_gallery, + dislike_gallery, + ], + ) + + # sets FABRIC params when "send to txt2img/img2img" is clicked + self.infotext_fields = [ + (feedback_enabled, lambda d: gr.Checkbox.update(value="fabric_start" in d)), + (feedback_start, "fabric_start"), + (feedback_end, "fabric_end"), + (feedback_min_weight, "fabric_min_weight"), + (feedback_max_weight, "fabric_max_weight"), + (feedback_neg_scale, "fabric_neg_scale"), + (tome_enabled, "fabric_tome_enabled"), + (tome_ratio, "fabric_tome_ratio"), + (tome_max_tokens, "fabric_tome_max_tokens"), + (tome_seed, "fabric_tome_seed"), + (burnout_protection, "fabric_burnout_protection"), + (feedback_during_high_res_fix, "fabric_feedback_during_high_res_fix"), + (liked_paths, lambda d: gr.update(value=_load_feedback_paths(d, "fabric_pos_images")) if "fabric_pos_images" in d else None), + (disliked_paths, lambda d: gr.update(value=_load_feedback_paths(d, "fabric_neg_images")) if "fabric_neg_images" in d else None), + (like_gallery, lambda d: gr.Gallery.update(value=_load_gallery(d, "fabric_pos_images")) if "fabric_pos_images" in d else None), + (dislike_gallery, lambda d: gr.Gallery.update(value=_load_gallery(d, "fabric_neg_images")) if "fabric_neg_images" in d else None), + ] + + return [ + liked_paths, + disliked_paths, + feedback_enabled, + feedback_start, + feedback_end, + feedback_min_weight, + feedback_max_weight, + feedback_neg_scale, + feedback_during_high_res_fix, + tome_enabled, + tome_ratio, + tome_max_tokens, + tome_seed, + burnout_protection, + ] + + + def select_for_removal(self, gallery, selected_idx): + return [ + selected_idx, + gr.update(interactive=True), + ] + + def remove_selected(self, paths, idx): + if idx >= 0 and idx < len(paths): + paths.pop(idx) + gallery = [full_image_path(path) for path in paths] + + return [ + gallery, + paths, + gr.update(value=None), + gr.update(interactive=False), + ] + + def add_image_to_state(self, img, paths): + if img is not None: + path = save_feedback_image(img) + paths.append(path) + gallery = [full_image_path(path) for path in paths] + return gallery, paths + + def save_preset(self, presets, liked_paths, disliked_paths, preset_name): + if preset_name is not None and preset_name != "": + _save_preset(preset_name, liked_paths, disliked_paths) + return gr.update(choices=_load_presets()) + + def on_preset_selected(self, preset_name, liked_paths, disliked_paths): + preset_path = Path(modules.scripts.basedir(), PRESET_PATH, f"{preset_name}.json") + if preset_path.exists(): + try: + with open(preset_path, "r") as f: + preset = json.load(f) + assert "liked_paths" in preset, "Missing 'liked_paths' in preset" + assert "disliked_paths" in preset, "Missing 'disliked_paths' in preset" + liked_paths = preset["liked_paths"] + disliked_paths = preset["disliked_paths"] + except Exception as e: + traceback.print_exc() + print(f"Failed to load preset: {preset_path}") + like_gallery = [full_image_path(path) for path in liked_paths] + dislike_gallery = [full_image_path(path) for path in disliked_paths] + return liked_paths, disliked_paths, like_gallery, dislike_gallery + + def register_txt2img_gallery_select(self, gallery): + self.register_gallery_select( + gallery, + listener=self.on_txt2img_gallery_select, + selected=self.txt2img_selected_image, + display=self.txt2img_selected_display, + ) + + def register_img2img_gallery_select(self, gallery): + self.register_gallery_select( + gallery, + listener=self.on_img2img_gallery_select, + selected=self.img2img_selected_image, + display=self.img2img_selected_display, + ) + + def register_gallery_select(self, gallery, listener=None, selected=None, display=None): + gallery.select( + listener, + _js="(a, b) => [a, selected_gallery_index()]", + inputs=[ + gallery, + gallery, # can be any Gradio component (but not None), will be overwritten with selected gallery index + ], + outputs=[selected, display], + ) + + def on_txt2img_gallery_select(self, gallery, selected_idx): + return self.on_gallery_select(gallery, selected_idx, FabricState.txt2img_images) + + def on_img2img_gallery_select(self, gallery, selected_idx): + return self.on_gallery_select(gallery, selected_idx, FabricState.img2img_images) + + def on_gallery_select(self, gallery, selected_idx, images): + idx = selected_idx - (len(gallery) - len(images)) + + if idx >= 0 and idx < len(images): + return images[idx], gr.update(value=images[idx]) + else: + return None, None + + def process(self, p, *args): + ( + liked_paths, + disliked_paths, + feedback_enabled, + feedback_start, + feedback_end, + feedback_min_weight, + feedback_max_weight, + feedback_neg_scale, + feedback_during_high_res_fix, + tome_enabled, + tome_ratio, + tome_max_tokens, + tome_seed, + burnout_protection, + ) = args + + # restore original U-Net forward pass in case previous batch errored out + unpatch_unet_forward_pass(p.sd_model.model.diffusion_model) + + if not feedback_enabled: + return + + likes = [load_feedback_image(path) for path in liked_paths] + dislikes = [load_feedback_image(path) for path in disliked_paths] + + params = FabricParams( + enabled=feedback_enabled, + start=feedback_start, + end=feedback_end, + min_weight=feedback_min_weight, + max_weight=feedback_max_weight, + neg_scale=feedback_neg_scale, + pos_images=likes, + neg_images=dislikes, + feedback_during_high_res_fix=feedback_during_high_res_fix, + tome_enabled=tome_enabled, + tome_ratio=(round(tome_ratio * 16) / 16), + tome_max_tokens=tome_max_tokens, + tome_seed=get_fixed_seed(int(tome_seed)), + burnout_protection=burnout_protection, + ) + + + if use_feedback(params) or (DEBUG and feedback_enabled): + print(f"[FABRIC] Patching U-Net forward pass... ({len(likes)} likes, {len(dislikes)} dislikes)") + + # log the generation params to be displayed/stored as metadata + log_params = asdict(params) + log_params["pos_images"] = json.dumps(liked_paths) + log_params["neg_images"] = json.dumps(disliked_paths) + del log_params["enabled"] + + if not params.tome_enabled: + del log_params["tome_ratio"] + del log_params["tome_max_tokens"] + del log_params["tome_seed"] + + log_params = {f"fabric_{k}": v for k, v in log_params.items()} + p.extra_generation_params.update(log_params) + + unet = p.sd_model.model.diffusion_model + patch_unet_forward_pass(p, unet, params) + else: + print("[FABRIC] Skipping U-Net forward pass patching") + + def postprocess(self, p, processed, *args): + unpatch_unet_forward_pass(p.sd_model.model.diffusion_model) + + images = processed.images[processed.index_of_first_image:] + if isinstance(p, StableDiffusionProcessingTxt2Img): + FabricState.txt2img_images = images + elif isinstance(p, StableDiffusionProcessingImg2Img): + FabricState.img2img_images = images + else: + raise RuntimeError(f"Unsupported processing type: {type(p)}") + + +script_callbacks.on_after_component(WebUiComponents.register_component) diff --git a/extensions/CHECK/sd-webui-fabric/scripts/fabric_utils.py b/extensions/CHECK/sd-webui-fabric/scripts/fabric_utils.py new file mode 100644 index 0000000000000000000000000000000000000000..5648bf6e48045e58dee81191d7a4137caac8e6a3 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/scripts/fabric_utils.py @@ -0,0 +1,46 @@ +import hashlib + +from PIL import Image + + +def image_hash(img: Image.Image, length: int = 16): + hash_sha256 = hashlib.sha256() + hash_sha256.update(img.tobytes()) + img_hash = hash_sha256.hexdigest() + if length and length > 0: + img_hash = img_hash[:length] + return img_hash + + +class WebUiComponents: + txt2img_gallery = None + img2img_gallery = None + txt2img_callbacks = [] + img2img_callbacks = [] + + @staticmethod + def on_txt2img_gallery(callback): + if WebUiComponents.txt2img_gallery is not None: + callback(WebUiComponents.txt2img_gallery) + else: + WebUiComponents.txt2img_callbacks.append(callback) + + def on_img2img_gallery(callback): + if WebUiComponents.img2img_gallery is not None: + callback(WebUiComponents.img2img_gallery) + else: + WebUiComponents.img2img_callbacks.append(callback) + + @staticmethod + def register_component(component, **kwargs): + elem_id = getattr(component, "elem_id", None) + if elem_id == "txt2img_gallery": + WebUiComponents.txt2img_gallery = component + for callback in WebUiComponents.txt2img_callbacks: + callback(component) + WebUiComponents.txt2img_callbacks = [] + elif elem_id == "img2img_gallery": + WebUiComponents.img2img_gallery = component + for callback in WebUiComponents.img2img_callbacks: + callback(component) + WebUiComponents.img2img_callbacks = [] diff --git a/extensions/CHECK/sd-webui-fabric/scripts/marking.py b/extensions/CHECK/sd-webui-fabric/scripts/marking.py new file mode 100644 index 0000000000000000000000000000000000000000..b799329fdf1c0317ca0400a4d66e55e9d086cc2c --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/scripts/marking.py @@ -0,0 +1,99 @@ +import torch + +from modules.prompt_parser import MulticondLearnedConditioning, ComposableScheduledPromptConditioning, ScheduledPromptConditioning +from modules.processing import StableDiffusionProcessing + + +""" +We adopt the same marking strategy as ControlNet for determining whether a prompt is conditional or unconditional. +For the original implementation see: https://github.com/Mikubill/sd-webui-controlnet/blob/main/scripts/hook.py +""" + +POSITIVE_MARK_TOKEN = 1024 +NEGATIVE_MARK_TOKEN = - POSITIVE_MARK_TOKEN +MARK_EPS = 1e-3 + + +def process_sample(process, *args, **kwargs): + # ControlNet must know whether a prompt is conditional prompt (positive prompt) or unconditional conditioning prompt (negative prompt). + # You can use the hook.py's `mark_prompt_context` to mark the prompts that will be seen by ControlNet. + # Let us say XXX is a MulticondLearnedConditioning or a ComposableScheduledPromptConditioning or a ScheduledPromptConditioning or a list of these components, + # if XXX is a positive prompt, you should call mark_prompt_context(XXX, positive=True) + # if XXX is a negative prompt, you should call mark_prompt_context(XXX, positive=False) + # After you mark the prompts, the ControlNet will know which prompt is cond/uncond and works as expected. + # After you mark the prompts, the mismatch errors will disappear. + mark_prompt_context(kwargs.get('conditioning', []), positive=True) + mark_prompt_context(kwargs.get('unconditional_conditioning', []), positive=False) + mark_prompt_context(getattr(process, 'hr_c', []), positive=True) + mark_prompt_context(getattr(process, 'hr_uc', []), positive=False) + return process.sample_before_CN_hack(*args, **kwargs) + + +def prompt_context_is_marked(x): + t = x[..., 0, :] + m = torch.abs(t) - POSITIVE_MARK_TOKEN + m = torch.mean(torch.abs(m)).detach().cpu().float().numpy() + return float(m) < MARK_EPS + + +def mark_prompt_context(x, positive): + if isinstance(x, list): + for i in range(len(x)): + x[i] = mark_prompt_context(x[i], positive) + return x + if isinstance(x, MulticondLearnedConditioning): + x.batch = mark_prompt_context(x.batch, positive) + return x + if isinstance(x, ComposableScheduledPromptConditioning): + x.schedules = mark_prompt_context(x.schedules, positive) + return x + if isinstance(x, ScheduledPromptConditioning): + if isinstance(x.cond, dict): + cond = x.cond['crossattn'] + if prompt_context_is_marked(cond): + return x + mark = POSITIVE_MARK_TOKEN if positive else NEGATIVE_MARK_TOKEN + cond = torch.cat([torch.zeros_like(cond)[:1] + mark, cond], dim=0) + return ScheduledPromptConditioning(end_at_step=x.end_at_step, cond=dict(crossattn=cond, vector=x.cond['vector'])) + else: + cond = x.cond + if prompt_context_is_marked(cond): + return x + mark = POSITIVE_MARK_TOKEN if positive else NEGATIVE_MARK_TOKEN + cond = torch.cat([torch.zeros_like(cond)[:1] + mark, cond], dim=0) + return ScheduledPromptConditioning(end_at_step=x.end_at_step, cond=cond) + return x + + +def unmark_prompt_context(x): + if not prompt_context_is_marked(x): + # ControlNet must know whether a prompt is conditional prompt (positive prompt) or unconditional conditioning prompt (negative prompt). + # You can use the hook.py's `mark_prompt_context` to mark the prompts that will be seen by ControlNet. + # Let us say XXX is a MulticondLearnedConditioning or a ComposableScheduledPromptConditioning or a ScheduledPromptConditioning or a list of these components, + # if XXX is a positive prompt, you should call mark_prompt_context(XXX, positive=True) + # if XXX is a negative prompt, you should call mark_prompt_context(XXX, positive=False) + # After you mark the prompts, the ControlNet will know which prompt is cond/uncond and works as expected. + # After you mark the prompts, the mismatch errors will disappear. + mark_batch = torch.ones(size=(x.shape[0], 1, 1, 1), dtype=x.dtype, device=x.device) + context = x + return mark_batch, [], [], context + mark = x[:, 0, :] + context = x[:, 1:, :] + mark = torch.mean(torch.abs(mark - NEGATIVE_MARK_TOKEN), dim=1) + mark = (mark > MARK_EPS).float() + mark_batch = mark[:, None, None, None].to(x.dtype).to(x.device) + + mark = mark.detach().cpu().numpy().tolist() + uc_indices = [i for i, item in enumerate(mark) if item < 0.5] + c_indices = [i for i, item in enumerate(mark) if not item < 0.5] + + StableDiffusionProcessing.cached_c = [None, None] + StableDiffusionProcessing.cached_uc = [None, None] + + return mark_batch, uc_indices, c_indices, context + + +def apply_marking_patch(process): + if getattr(process, 'sample_before_CN_hack', None) is None: + process.sample_before_CN_hack = process.sample + process.sample = process_sample.__get__(process) diff --git a/extensions/CHECK/sd-webui-fabric/scripts/merging.py b/extensions/CHECK/sd-webui-fabric/scripts/merging.py new file mode 100644 index 0000000000000000000000000000000000000000..70b8e7e06df88b8afae53356d0d27c36ca140348 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/scripts/merging.py @@ -0,0 +1,191 @@ +import torch +import math +from typing import Dict, Any, Tuple, Callable + + +""" +Copied and adapted from https://github.com/dbolya/tomesd/tree/main +Relevant files: +- https://github.com/dbolya/tomesd/blob/main/tomesd/merge.py +- https://github.com/dbolya/tomesd/blob/main/tomesd/patching.py +""" + +def init_generator(device: torch.device, fallback: torch.Generator=None, seed: int = 42): + """ + Forks the current default random generator given device. + """ + if device.type == "cpu": + return torch.Generator(device="cpu").manual_seed(seed) + elif device.type == "cuda": + return torch.Generator(device=device).manual_seed(seed) + else: + if fallback is None: + return init_generator(torch.device("cpu")) + else: + return fallback + +def do_nothing(x: torch.Tensor, mode: str = None): + return x + + +def mps_gather_workaround(input, dim, index): + if input.shape[-1] == 1: + return torch.gather( + input.unsqueeze(-1), + dim - 1 if dim < 0 else dim, + index.unsqueeze(-1) + ).squeeze(-1) + else: + return torch.gather(input, dim, index) + + +def bipartite_soft_matching_random2d(metric: torch.Tensor, + w: int, h: int, sx: int, sy: int, r: int, + no_rand: bool = False, + generator: torch.Generator = None) -> Tuple[Callable, Callable]: + """ + Partitions the tokens into src and dst and merges r tokens from src to dst. + Dst tokens are partitioned by choosing one randomy in each (sx, sy) region. + + Args: + - metric [B, N, C]: metric to use for similarity + - w: image width in tokens + - h: image height in tokens + - sx: stride in the x dimension for dst, must divide w + - sy: stride in the y dimension for dst, must divide h + - r: number of tokens to remove (by merging) + - no_rand: if true, disable randomness (use top left corner only) + - rand_seed: if no_rand is false, and if not None, sets random seed. + """ + B, N, _ = metric.shape + + if r <= 0: + return do_nothing, do_nothing + + gather = mps_gather_workaround if metric.device.type == "mps" else torch.gather + + with torch.no_grad(): + hsy, wsx = h // sy, w // sx + + # For each sy by sx kernel, randomly assign one token to be dst and the rest src + if no_rand: + rand_idx = torch.zeros(hsy, wsx, 1, device=metric.device, dtype=torch.int64) + else: + rand_idx = torch.randint(sy*sx, size=(hsy, wsx, 1), device=generator.device, generator=generator).to(metric.device) + + # The image might not divide sx and sy, so we need to work on a view of the top left if the idx buffer instead + idx_buffer_view = torch.zeros(hsy, wsx, sy*sx, device=metric.device, dtype=torch.int64) + idx_buffer_view.scatter_(dim=2, index=rand_idx, src=-torch.ones_like(rand_idx, dtype=rand_idx.dtype)) + idx_buffer_view = idx_buffer_view.view(hsy, wsx, sy, sx).transpose(1, 2).reshape(hsy * sy, wsx * sx) + + # Image is not divisible by sx or sy so we need to move it into a new buffer + if (hsy * sy) < h or (wsx * sx) < w: + idx_buffer = torch.zeros(h, w, device=metric.device, dtype=torch.int64) + idx_buffer[:(hsy * sy), :(wsx * sx)] = idx_buffer_view + else: + idx_buffer = idx_buffer_view + + # We set dst tokens to be -1 and src to be 0, so an argsort gives us dst|src indices + rand_idx = idx_buffer.reshape(1, -1, 1).argsort(dim=1) + + # We're finished with these + del idx_buffer, idx_buffer_view + + # rand_idx is currently dst|src, so split them + num_dst = hsy * wsx + a_idx = rand_idx[:, num_dst:, :] # src + b_idx = rand_idx[:, :num_dst, :] # dst + + def split(x): + C = x.shape[-1] + src = gather(x, dim=1, index=a_idx.expand(B, N - num_dst, C)) + dst = gather(x, dim=1, index=b_idx.expand(B, num_dst, C)) + return src, dst + + # Cosine similarity between A and B + metric = metric / metric.norm(dim=-1, keepdim=True) + a, b = split(metric) + scores = a @ b.transpose(-1, -2) + + # Can't reduce more than the # tokens in src + r = min(a.shape[1], r) + + # Find the most similar greedily + node_max, node_idx = scores.max(dim=-1) + edge_idx = node_max.argsort(dim=-1, descending=True)[..., None] + + unm_idx = edge_idx[..., r:, :] # Unmerged Tokens + src_idx = edge_idx[..., :r, :] # Merged Tokens + dst_idx = gather(node_idx[..., None], dim=-2, index=src_idx) + + def merge(x: torch.Tensor, mode="mean") -> torch.Tensor: + src, dst = split(x) + n, t1, c = src.shape + + unm = gather(src, dim=-2, index=unm_idx.expand(n, t1 - r, c)) + src = gather(src, dim=-2, index=src_idx.expand(n, r, c)) + dst = dst.scatter_reduce(-2, dst_idx.expand(n, r, c), src, reduce=mode) + + return torch.cat([unm, dst], dim=1) + + def unmerge(x: torch.Tensor) -> torch.Tensor: + unm_len = unm_idx.shape[1] + unm, dst = x[..., :unm_len, :], x[..., unm_len:, :] + _, _, c = unm.shape + + src = gather(dst, dim=-2, index=dst_idx.expand(B, r, c)) + + # Combine back to the original shape + out = torch.zeros(B, N, c, device=x.device, dtype=x.dtype) + out.scatter_(dim=-2, index=b_idx.expand(B, num_dst, c), src=dst) + out.scatter_(dim=-2, index=gather(a_idx.expand(B, a_idx.shape[1], 1), dim=1, index=unm_idx).expand(B, unm_len, c), src=unm) + out.scatter_(dim=-2, index=gather(a_idx.expand(B, a_idx.shape[1], 1), dim=1, index=src_idx).expand(B, r, c), src=src) + + return out + + return merge, unmerge + + +def compute_merge( + x: torch.Tensor, + args: Dict[str, Any], + size: Tuple[int, int], + max_tokens: int = None, + ratio: float = None, +) -> Tuple[Callable, ...]: + if not args["enabled"]: + return do_nothing, do_nothing + + if max_tokens is None and ratio is None: + raise ValueError("Must specify either max_tokens or ratio") + + original_h, original_w = size + original_tokens = original_h * original_w + downsample = int(math.ceil(math.sqrt(original_tokens // x.shape[1]))) + + if ratio is not None: + target_tokens = int(x.shape[1] * (1 - ratio)) + else: + target_tokens = x.shape[1] + + if max_tokens is not None and max_tokens > 0: + target_tokens = min(target_tokens, max_tokens) # remove all but max_tokens tokens + r = x.shape[1] - target_tokens + + if r > 0: + w = int(math.ceil(original_w / downsample)) + h = int(math.ceil(original_h / downsample)) + + # Re-init the generator if it hasn't already been initialized or device has changed. + if args["generator"] is None: + args["generator"] = init_generator(x.device, seed=args["seed"]) + elif args["generator"].device != x.device: + args["generator"] = init_generator(x.device, fallback=args["generator"], seed=args["seed"]) + + # If the batch size is odd, then it's not possible for prompted and unprompted images to be in the same + # batch, which causes artifacts with use_rand, so force it to be off. + use_rand = False if x.shape[0] % 2 == 1 else args["use_rand"] + return bipartite_soft_matching_random2d(x, w, h, args["sx"], args["sy"], r, + no_rand=not use_rand, generator=args["generator"]) + else: + return do_nothing, do_nothing diff --git a/extensions/CHECK/sd-webui-fabric/scripts/patching.py b/extensions/CHECK/sd-webui-fabric/scripts/patching.py new file mode 100644 index 0000000000000000000000000000000000000000..fea7185ab1c842d2f63e5e541d31d056ecdece49 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/scripts/patching.py @@ -0,0 +1,338 @@ +import functools + +import torch +import torchvision.transforms.functional as functional + +from modules import devices, images, shared +from modules.processing import StableDiffusionProcessingTxt2Img + +import ldm.modules.attention +import sgm.modules.attention +from ldm.models.diffusion.ddpm import LatentDiffusion +from ldm.models.diffusion.ddpm import extract_into_tensor +from sgm.models.diffusion import DiffusionEngine + +from scripts.marking import apply_marking_patch, unmark_prompt_context +from scripts.fabric_utils import image_hash +from scripts.weighted_attention import weighted_attention +from scripts.merging import compute_merge + +try: + import ldm_patched.ldm.modules.attention + has_webui_forge = True + print("[FABRIC] Detected WebUI Forge, running in compatibility mode.") +except ImportError: + has_webui_forge = False + + +SD15 = "sd15" +SDXL = "sdxl" + + +def encode_to_latent(p, image, w, h): + image = images.resize_image(1, image, w, h) + x = functional.pil_to_tensor(image) + x = functional.center_crop(x, (w, h)) # just to be safe + x = x.to(devices.device, dtype=devices.dtype_vae) + x = ((x / 255.0) * 2.0 - 1.0).unsqueeze(0) + + # TODO: use caching to make this faster + with devices.autocast(): + vae_output = p.sd_model.encode_first_stage(x) + z = p.sd_model.get_first_stage_encoding(vae_output) + if torch.isnan(z).any(): + print(f"[FABRIC] NaNs in VAE output found, retrying with 32-bit precision. To always start with 32-bit VAE, use --no-half-vae commandline flag.") + devices.dtype_vae = torch.float32 + x = x.to(devices.dtype_vae) + p.sd_model.first_stage_model.to(devices.dtype_vae) + vae_output = p.sd_model.encode_first_stage(x) + z = p.sd_model.get_first_stage_encoding(vae_output) + z = z.to(devices.dtype_unet) + return z.squeeze(0) + +def forward_noise(p, x_0, t, noise=None): + device = x_0.device + if noise is None: + noise = torch.randn_like(x_0) + alpha_bar = p.sd_model.alphas_cumprod.to(device) + sqrt_alpha_bar_t = extract_into_tensor(alpha_bar.sqrt(), t, x_0.shape) + sqrt_one_minus_alpha_bar_t = extract_into_tensor((1.0 - alpha_bar).sqrt(), t, x_0.shape) + x_t = sqrt_alpha_bar_t * x_0 + sqrt_one_minus_alpha_bar_t * noise + return x_t + + +def get_latents_from_params(p, params, width, height): + w, h = (width // 8) * 8, (height // 8) * 8 + w_latent, h_latent = width // 8, height // 8 + + def get_latents(images, cached_latents=None): + # check if latents need to be computed or recomputed (if image size changed e.g. due to high-res fix) + if cached_latents is None: + cached_latents = {} + + latents = [] + for img in images: + img_hash = image_hash(img) + if img_hash not in cached_latents: + cached_latents[img_hash] = encode_to_latent(p, img, w, h) + elif cached_latents[img_hash].shape[-2:] != (w_latent, h_latent): + print(f"[FABRIC] Recomputing latent for image of size {img.size}") + cached_latents[img_hash] = encode_to_latent(p, img, w, h) + latents.append(cached_latents[img_hash]) + return latents, cached_latents + + params.pos_latents, params.pos_latent_cache = get_latents(params.pos_images, params.pos_latent_cache) + params.neg_latents, params.neg_latent_cache = get_latents(params.neg_images, params.neg_latent_cache) + return params.pos_latents, params.neg_latents + + +def get_curr_feedback_weight(p, params, timestep, num_timesteps=1000): + progress = 1 - (timestep / (num_timesteps - 1)) + if progress >= params.start and progress <= params.end: + w = params.max_weight + else: + w = params.min_weight + return max(0, w), max(0, w * params.neg_scale) + + +def patch_unet_forward_pass(p, unet, params): + if not params.pos_images and not params.neg_images: + print("[FABRIC] No feedback images found, aborting patching") + return + + if not hasattr(unet, "_fabric_old_forward"): + unet._fabric_old_forward = unet.forward + + if isinstance(p.sd_model, LatentDiffusion): + sd_version = SD15 + num_timesteps = p.sd_model.num_timesteps + elif isinstance(p.sd_model, DiffusionEngine): + sd_version = SDXL + num_timesteps = len(p.sd_model.alphas_cumprod) + else: + raise ValueError(f"[FABRIC] Unsupported SD model: {type(p.sd_model)}") + + transformer_block_type = tuple( + [ + ldm.modules.attention.BasicTransformerBlock, # SD 1.5 + sgm.modules.attention.BasicTransformerBlock, # SDXL + ] + + ([ldm_patched.ldm.modules.attention.BasicTransformerBlock] if has_webui_forge else []) + ) + + batch_size = p.batch_size + + null_ctx = p.sd_model.get_learned_conditioning([""]) + if isinstance(null_ctx, torch.Tensor): # SD1.5 + null_ctx = null_ctx.to(devices.device, dtype=devices.dtype_unet) + elif isinstance(null_ctx, dict): # SDXL + for key in null_ctx: + if isinstance(null_ctx[key], torch.Tensor): + null_ctx[key] = null_ctx[key].to(devices.device, dtype=devices.dtype_unet) + else: + raise ValueError(f"[FABRIC] Unsupported context type: {type(null_ctx)}") + + width = (p.width // 8) * 8 + height = (p.height // 8) * 8 + + has_hires_fix = isinstance(p, StableDiffusionProcessingTxt2Img) and getattr(p, 'enable_hr', False) + if has_hires_fix: + if p.hr_resize_x == 0 and p.hr_resize_y == 0: + hr_w = int(p.width * p.hr_scale) + hr_h = int(p.height * p.hr_scale) + else: + hr_w, hr_h = p.hr_resize_x, p.hr_resize_y + hr_w = (hr_w // 8) * 8 + hr_h = (hr_h // 8) * 8 + else: + hr_w = width + hr_h = height + + tome_args = { + "enabled": params.tome_enabled, + "sx": 2, "sy": 2, + "use_rand": True, + "generator": None, + "seed": params.tome_seed, + } + + prev_vals = { + "weight_modifier": 1.0, + } + + def new_forward(self, x, timesteps=None, context=None, **kwargs): + _, uncond_ids, cond_ids, context = unmark_prompt_context(context) + has_cond = len(cond_ids) > 0 + has_uncond = len(uncond_ids) > 0 + + h_latent, w_latent = x.shape[-2:] + w, h = 8 * w_latent, 8 * h_latent + if has_hires_fix and w == hr_w and h == hr_h: + if not params.feedback_during_high_res_fix: + print("[FABRIC] Skipping feedback during high-res fix") + return self._fabric_old_forward(x, timesteps, context, **kwargs) + + pos_weight, neg_weight = get_curr_feedback_weight(p, params, timesteps[0].item(), num_timesteps=num_timesteps) + if pos_weight <= 0 and neg_weight <= 0: + return self._fabric_old_forward(x, timesteps, context, **kwargs) + + if params.burnout_protection and "cond" in prev_vals and "uncond" in prev_vals: + # burnout protection: if the difference betwen cond/uncond was too high in the previous step (sign of instability), slash the weight modifier + diff_std = (prev_vals["cond"] - prev_vals["uncond"]).std(dim=(2, 3)).max().item() + diff_abs_mean = (prev_vals["cond"] - prev_vals["uncond"]).mean(dim=(2, 3)).abs().max().item() + if diff_std > 0.06 or diff_abs_mean > 0.02: + prev_vals["weight_modifier"] *= 0.5 + else: + prev_vals["weight_modifier"] = min(1.0, 1.5 * prev_vals["weight_modifier"]) + + pos_weight, neg_weight = pos_weight * prev_vals["weight_modifier"], neg_weight * prev_vals["weight_modifier"] + + pos_latents, neg_latents = get_latents_from_params(p, params, w, h) + pos_latents = pos_latents if has_cond else [] + neg_latents = neg_latents if has_uncond else [] + all_latents = pos_latents + neg_latents + + # Note: calls to the VAE with `--medvram` will move the U-Net to CPU, so we need to move it back to GPU + if shared.cmd_opts.medvram: + try: + # Trigger register_forward_pre_hook to move the model to correct device + p.sd_model.model() + except: + pass + + if len(all_latents) == 0: + return self._fabric_old_forward(x, timesteps, context, **kwargs) + + # add noise to reference latents + xs_0 = torch.stack(all_latents, dim=0) + ts = timesteps[0, None].expand(xs_0.size(0)) # (bs,) + all_zs = forward_noise(p, xs_0, torch.round(ts.float()).long()) + + # save original forward pass + for module in self.modules(): + if isinstance(module, transformer_block_type) and not hasattr(module.attn1, "_fabric_old_forward"): + module.attn1._fabric_old_forward = module.attn1.forward + module.attn2._fabric_old_forward = module.attn2.forward + + try: + ## cache hidden states + cached_hiddens = {} + def patched_attn1_forward(attn1, layer_idx, x, **kwargs): + merge, unmerge = compute_merge(x, args=tome_args, size=(h_latent, w_latent), ratio=params.tome_ratio) + x = merge(x) + if layer_idx not in cached_hiddens: + cached_hiddens[layer_idx] = x.detach().clone().cpu() + else: + cached_hiddens[layer_idx] = torch.cat([cached_hiddens[layer_idx], x.detach().clone().cpu()], dim=0) + out = attn1._fabric_old_forward(x, **kwargs) + out = unmerge(out) + return out + + def patched_attn2_forward(attn2, x, **kwargs): + merge, unmerge = compute_merge(x, args=tome_args, size=(h_latent, w_latent), ratio=params.tome_ratio) + x = merge(x) + out = attn2._fabric_old_forward(x, **kwargs) + out = unmerge(out) + return out + + # patch forward pass to cache hidden states + layer_idx = 0 + for module in self.modules(): + if isinstance(module, transformer_block_type): + module.attn1.forward = functools.partial(patched_attn1_forward, module.attn1, layer_idx) + module.attn2.forward = functools.partial(patched_attn2_forward, module.attn2) + layer_idx += 1 + + # run forward pass just to cache hidden states, output is discarded + for i in range(0, len(all_zs), batch_size): + zs = all_zs[i : i + batch_size].to(x.device, dtype=self.dtype) + ts = timesteps[:1].expand(zs.size(0)) # (bs,) + # use the null prompt for pre-computing hidden states on feedback images + ctx_args = {} + if sd_version == SD15: + ctx_args["context"] = null_ctx.expand(zs.size(0), -1, -1) # (bs, seq_len, d_model) + else: # SDXL + ctx_args["context"] = null_ctx["crossattn"].expand(zs.size(0), -1, -1) # (bs, seq_len, d_model) + ctx_args["y"] = null_ctx["vector"].expand(zs.size(0), -1) # (bs, d_vector) + _ = self._fabric_old_forward(zs, ts, **ctx_args) + + num_pos = len(pos_latents) + num_neg = len(neg_latents) + num_cond = len(cond_ids) + num_uncond = len(uncond_ids) + tome_h_latent = h_latent * (1 - params.tome_ratio) + + def patched_attn1_forward(attn1, idx, x, context=None, **kwargs): + if context is None: + context = x + + cached_hs = cached_hiddens[idx].to(x.device) + + d_model = x.shape[-1] + + def attention_with_feedback(_x, context, feedback_hs, w): + num_xs, num_fb = _x.shape[0], feedback_hs.shape[0] + if num_fb > 0: + feedback_ctx = feedback_hs.view(1, -1, d_model).expand(num_xs, -1, -1) # (n_cond, seq * n_pos, dim) + merge, _ = compute_merge(feedback_ctx, args=tome_args, size=(tome_h_latent * num_fb, w_latent), max_tokens=params.tome_max_tokens) + feedback_ctx = merge(feedback_ctx) + ctx = torch.cat([context, feedback_ctx], dim=1) # (n_cond, seq + seq*n_pos, dim) + weights = torch.ones(ctx.shape[1], device=ctx.device, dtype=ctx.dtype) # (seq + seq*n_pos,) + weights[_x.shape[1]:] = w + else: + ctx = context + weights = None + return weighted_attention(attn1, attn1._fabric_old_forward, _x, ctx, weights, **kwargs) # (n_cond, seq, dim) + + out = torch.zeros_like(x, dtype=devices.dtype_unet) + if num_cond > 0: + out_cond = attention_with_feedback(x[cond_ids], context[cond_ids], cached_hs[:num_pos], pos_weight) # (n_cond, seq, dim) + out[cond_ids] = out_cond + if num_uncond > 0: + out_uncond = attention_with_feedback(x[uncond_ids], context[uncond_ids], cached_hs[num_pos:], neg_weight) # (n_cond, seq, dim) + out[uncond_ids] = out_uncond + return out + + # patch forward pass to inject cached hidden states + layer_idx = 0 + for module in self.modules(): + if isinstance(module, transformer_block_type): + module.attn1.forward = functools.partial(patched_attn1_forward, module.attn1, layer_idx) + layer_idx += 1 + + # run forward pass with cached hidden states + out = self._fabric_old_forward(x, timesteps, context, **kwargs) + + cond_outs = out[cond_ids] + uncond_outs = out[uncond_ids] + + if has_cond: + prev_vals["cond"] = cond_outs.detach().clone() + if has_uncond: + prev_vals["uncond"] = uncond_outs.detach().clone() + + if params.burnout_protection: + # burnout protection: recenter the output to prevent instabilities caused by mean drift + mean = out.mean(dim=(2, 3), keepdim=True) + out = out - 0.7 * mean + finally: + # restore original pass + for module in self.modules(): + if isinstance(module, transformer_block_type) and hasattr(module.attn1, "_fabric_old_forward"): + module.attn1.forward = module.attn1._fabric_old_forward + del module.attn1._fabric_old_forward + if isinstance(module, transformer_block_type) and hasattr(module.attn2, "_fabric_old_forward"): + module.attn2.forward = module.attn2._fabric_old_forward + del module.attn2._fabric_old_forward + + return out + + unet.forward = new_forward.__get__(unet) + + apply_marking_patch(p) + +def unpatch_unet_forward_pass(unet): + if hasattr(unet, "_fabric_old_forward"): + print("[FABRIC] Restoring original U-Net forward pass") + unet.forward = unet._fabric_old_forward + del unet._fabric_old_forward diff --git a/extensions/CHECK/sd-webui-fabric/scripts/weighted_attention.py b/extensions/CHECK/sd-webui-fabric/scripts/weighted_attention.py new file mode 100644 index 0000000000000000000000000000000000000000..08fd21545c3a2829c4152503f86b26131b1b5a11 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/scripts/weighted_attention.py @@ -0,0 +1,359 @@ +import math +import psutil + +import torch +import torch.nn.functional +from torch import einsum +from einops import rearrange + +from ldm.util import default + +from modules import shared, devices, sd_hijack +from modules.hypernetworks import hypernetwork +from modules.sd_hijack_optimizations import ( + get_xformers_flash_attention_op, + get_available_vram, +) + +try: + import xformers + import xformers.ops +except ImportError: + pass + +try: + from ldm_patched.modules import model_management + has_webui_forge = True + print("[FABRIC] Detected WebUI Forge, running in compatibility mode.") +except ImportError: + has_webui_forge = False + + +def get_weighted_attn_fn(): + if has_webui_forge: + if model_management.xformers_enabled(): + return weighted_xformers_attention_forward + elif model_management.pytorch_attention_enabled(): + return weighted_scaled_dot_product_attention_forward + else: + print(f"[FABRIC] Warning: No attention method enabled. Falling back to split attention.") + return weighted_split_cross_attention_forward + + method = sd_hijack.model_hijack.optimization_method + if method is None: + return weighted_split_cross_attention_forward + method = method.lower() + + if method not in ['none', 'sdp-no-mem', 'sdp', 'xformers', 'sub-quadratic', 'v1', 'invokeai', 'doggettx']: + print(f"[FABRIC] Warning: Unknown attention optimization method {method}.") + return weighted_split_cross_attention_forward + + if method == 'none': + return weighted_split_cross_attention_forward + elif method == 'xformers': + return weighted_xformers_attention_forward + elif method == 'sdp-no-mem': + return weighted_scaled_dot_product_no_mem_attention_forward + elif method == 'sdp': + return weighted_scaled_dot_product_attention_forward + elif method == 'doggettx': + return weighted_split_cross_attention_forward + elif method == 'invokeai': + return weighted_split_cross_attention_forward_invokeAI + elif method == 'sub-quadratic': + print(f"[FABRIC] Warning: Sub-quadratic attention is not supported yet. Please open an issue if you need this for your workflow. Falling back to split attention.") + return weighted_split_cross_attention_forward + elif method == 'v1': + print(f"[FABRIC] Warning: V1 attention is not supported yet. Please open an issue if you need this for your workflow. Falling back to split attention.") + return weighted_split_cross_attention_forward + else: + return weighted_split_cross_attention_forward + + +def weighted_attention(self, attn_fn, x, context=None, weights=None, **kwargs): + if weights is None: + return attn_fn(x, context=context, **kwargs) + + weighted_attn_fn = get_weighted_attn_fn() + return weighted_attn_fn(self, x, context=context, weights=weights, mask=kwargs.get('mask', None)) + + +def _get_attn_bias(weights, shape=None, dtype=torch.float32): + # shape of weights needs to be divisible by 8 in order for xformers attn bias to work + last_dim = ((weights.shape[-1] - 1) // 8 + 1) * 8 + w_bias = torch.zeros(weights.shape[:-1] + (last_dim,), device=weights.device, dtype=dtype) + + min_val = torch.finfo(dtype).min + w_bias[..., :weights.shape[-1]] = weights.log().to(dtype=dtype).clamp(min=min_val) + + if shape is not None: + assert shape[-1] == weights.shape[-1], "Last dimension of shape must match last dimension of weights (number of keys)" + w_bias = w_bias.view([1] * (len(shape) - 1) + [-1]).expand(shape[:-1] + (last_dim,)) + # make sure not to consolidate the tensor after expanding, + # as it will lead to a stride overflow for large numbers of feedback images + + # slice in order to preserve multiple-of-8 stride + w_bias = w_bias[..., :weights.shape[-1]] + return w_bias + +### The following attn functions are copied and adapted from modules.sd_hijack_optimizations + +# --- InvokeAI --- +mem_total_gb = psutil.virtual_memory().total // (1 << 30) + +def einsum_op_compvis(q, k, v, weights=None): + s = einsum('b i d, b j d -> b i j', q, k) + if weights is not None: + s += _get_attn_bias(weights, s.shape, s.dtype) + s = s.softmax(dim=-1, dtype=s.dtype) + return einsum('b i j, b j d -> b i d', s, v) + +def einsum_op_slice_0(q, k, v, slice_size, weights=None): + r = torch.zeros(q.shape[0], q.shape[1], v.shape[2], device=q.device, dtype=q.dtype) + for i in range(0, q.shape[0], slice_size): + end = i + slice_size + r[i:end] = einsum_op_compvis(q[i:end], k[i:end], v[i:end], weights) + return r + +def einsum_op_slice_1(q, k, v, slice_size, weights=None): + r = torch.zeros(q.shape[0], q.shape[1], v.shape[2], device=q.device, dtype=q.dtype) + for i in range(0, q.shape[1], slice_size): + end = i + slice_size + r[:, i:end] = einsum_op_compvis(q[:, i:end], k, v, weights) + return r + +def einsum_op_mps_v1(q, k, v, weights=None): + if q.shape[0] * q.shape[1] <= 2**16: # (512x512) max q.shape[1]: 4096 + return einsum_op_compvis(q, k, v, weights) + else: + slice_size = math.floor(2**30 / (q.shape[0] * q.shape[1])) + if slice_size % 4096 == 0: + slice_size -= 1 + return einsum_op_slice_1(q, k, v, slice_size, weights) + +def einsum_op_mps_v2(q, k, v, weights=None): + if mem_total_gb > 8 and q.shape[0] * q.shape[1] <= 2**16: + return einsum_op_compvis(q, k, v, weights) + else: + return einsum_op_slice_0(q, k, v, 1, weights) + +def einsum_op_tensor_mem(q, k, v, max_tensor_mb, weights=None): + size_mb = q.shape[0] * q.shape[1] * k.shape[1] * q.element_size() // (1 << 20) + if size_mb <= max_tensor_mb: + return einsum_op_compvis(q, k, v, weights) + div = 1 << int((size_mb - 1) / max_tensor_mb).bit_length() + if div <= q.shape[0]: + return einsum_op_slice_0(q, k, v, q.shape[0] // div, weights) + return einsum_op_slice_1(q, k, v, max(q.shape[1] // div, 1), weights) + +def einsum_op_cuda(q, k, v, weights=None): + stats = torch.cuda.memory_stats(q.device) + mem_active = stats['active_bytes.all.current'] + mem_reserved = stats['reserved_bytes.all.current'] + mem_free_cuda, _ = torch.cuda.mem_get_info(q.device) + mem_free_torch = mem_reserved - mem_active + mem_free_total = mem_free_cuda + mem_free_torch + # Divide factor of safety as there's copying and fragmentation + return einsum_op_tensor_mem(q, k, v, mem_free_total / 3.3 / (1 << 20), weights) + +def einsum_op(q, k, v, weights=None): + if q.device.type == 'cuda': + return einsum_op_cuda(q, k, v, weights) + + if q.device.type == 'mps': + if mem_total_gb >= 32 and q.shape[0] % 32 != 0 and q.shape[0] * q.shape[1] < 2**18: + return einsum_op_mps_v1(q, k, v, weights) + return einsum_op_mps_v2(q, k, v, weights) + + # Smaller slices are faster due to L2/L3/SLC caches. + # Tested on i7 with 8MB L3 cache. + return einsum_op_tensor_mem(q, k, v, 32, weights) + +def weighted_split_cross_attention_forward_invokeAI(self, x, context=None, mask=None, weights=None): + h = self.heads + + q = self.to_q(x) + context = default(context, x) + + context_k, context_v = hypernetwork.apply_hypernetworks(shared.loaded_hypernetworks, context) + k = self.to_k(context_k) + v = self.to_v(context_v) + del context, context_k, context_v, x + + dtype = q.dtype + if shared.opts.upcast_attn: + q, k, v = q.float(), k.float(), v if v.device.type == 'mps' else v.float() + + with devices.without_autocast(disable=not shared.opts.upcast_attn): + k = k * self.scale + + q, k, v = (rearrange(t, 'b n (h d) -> (b h) n d', h=h) for t in (q, k, v)) + r = einsum_op(q, k, v, weights) + r = r.to(dtype) + return self.to_out(rearrange(r, '(b h) n d -> b n (h d)', h=h)) +# --- end InvokeAI --- + + +def weighted_xformers_attention_forward(self, x, context=None, mask=None, weights=None): + + h = self.heads + q_in = self.to_q(x) + context = default(context, x) + + context_k, context_v = hypernetwork.apply_hypernetworks(shared.loaded_hypernetworks, context) + k_in = self.to_k(context_k) + v_in = self.to_v(context_v) + + q, k, v = (rearrange(t, 'b n (h d) -> b n h d', h=h) for t in (q_in, k_in, v_in)) + del q_in, k_in, v_in + + dtype = q.dtype + if shared.opts.upcast_attn: + q, k, v = q.float(), k.float(), v.float() + + ### FABRIC ### + bias_shape = (q.size(0), q.size(2), q.size(1), k.size(1)) # (bs, h, nq, nk) + if weights is not None: + attn_bias = _get_attn_bias(weights, bias_shape, dtype=q.dtype) + else: + attn_bias = None + ### END FABRIC ### + + out = xformers.ops.memory_efficient_attention(q, k, v, attn_bias=attn_bias, op=get_xformers_flash_attention_op(q, k, v)) + + out = out.to(dtype) + + out = rearrange(out, 'b n h d -> b n (h d)', h=h) + return self.to_out(out) + + +def weighted_scaled_dot_product_attention_forward(self, x, context=None, mask=None, weights=None): + batch_size, sequence_length, inner_dim = x.shape + + if mask is not None: + mask = self.prepare_attention_mask(mask, sequence_length, batch_size) + mask = mask.view(batch_size, self.heads, -1, mask.shape[-1]) + + h = self.heads + q_in = self.to_q(x) + context = default(context, x) + + context_k, context_v = hypernetwork.apply_hypernetworks(shared.loaded_hypernetworks, context) + k_in = self.to_k(context_k) + v_in = self.to_v(context_v) + + head_dim = inner_dim // h + q = q_in.view(batch_size, -1, h, head_dim).transpose(1, 2) + k = k_in.view(batch_size, -1, h, head_dim).transpose(1, 2) + v = v_in.view(batch_size, -1, h, head_dim).transpose(1, 2) + + del q_in, k_in, v_in + + dtype = q.dtype + if shared.opts.upcast_attn: + q, k, v = q.float(), k.float(), v.float() + + ### FABRIC ### + mask_shape = q.shape[:3] + (k.shape[2],) # (bs, h, nq, nk) + if mask is None: + mask = 0 + else: + mask.masked_fill(not mask, -float('inf')) if mask.dtype==torch.bool else mask + mask = mask.to(dtype=q.dtype) + if weights is not None: + w_bias = _get_attn_bias(weights, mask_shape, dtype=q.dtype) + mask += w_bias + ### END FABRIC ### + + # the output of sdp = (batch, num_heads, seq_len, head_dim) + hidden_states = torch.nn.functional.scaled_dot_product_attention( + q, k, v, attn_mask=mask, dropout_p=0.0, is_causal=False + ) + + hidden_states = hidden_states.transpose(1, 2).reshape(batch_size, -1, h * head_dim) + hidden_states = hidden_states.to(dtype) + + # linear proj + hidden_states = self.to_out[0](hidden_states) + # dropout + hidden_states = self.to_out[1](hidden_states) + return hidden_states + +def weighted_scaled_dot_product_no_mem_attention_forward(self, x, context=None, mask=None, weights=None): + with torch.backends.cuda.sdp_kernel(enable_flash=True, enable_math=True, enable_mem_efficient=False): + return weighted_scaled_dot_product_attention_forward(self, x, context, mask, weights) + + +def weighted_split_cross_attention_forward(self, x, context=None, mask=None, weights=None): + h = self.heads + + q_in = self.to_q(x) + context = default(context, x) + + context_k, context_v = hypernetwork.apply_hypernetworks(shared.loaded_hypernetworks, context) + k_in = self.to_k(context_k) + v_in = self.to_v(context_v) + + dtype = q_in.dtype + if shared.opts.upcast_attn: + q_in, k_in, v_in = q_in.float(), k_in.float(), v_in if v_in.device.type == 'mps' else v_in.float() + + with devices.without_autocast(disable=not shared.opts.upcast_attn): + default_scale = (q_in.shape[-1] / h) ** -0.5 + k_in = k_in * getattr(self, "scale", default_scale) + + del context, x + + q, k, v = (rearrange(t, 'b n (h d) -> (b h) n d', h=h) for t in (q_in, k_in, v_in)) + del q_in, k_in, v_in + + r1 = torch.zeros(q.shape[0], q.shape[1], v.shape[2], device=q.device, dtype=q.dtype) + + mem_free_total = get_available_vram() + + gb = 1024 ** 3 + tensor_size = q.shape[0] * q.shape[1] * k.shape[1] * q.element_size() + modifier = 3 if q.element_size() == 2 else 2.5 + mem_required = tensor_size * modifier + + # FABRIC incurs some batch-size-dependend overhead. Found empirically on RTX 3090. + bs = q.shape[0] / 8 # batch size + mem_required *= 1/(bs + 1) + 1.25 + mem_required *= 1.05 # safety margin + steps = 1 + + if mem_required > mem_free_total: + steps = 2 ** (math.ceil(math.log(mem_required / mem_free_total, 2))) + # print(f"Expected tensor size:{tensor_size/gb:0.1f}GB, cuda free:{mem_free_cuda/gb:0.1f}GB " + # f"torch free:{mem_free_torch/gb:0.1f} total:{mem_free_total/gb:0.1f} steps:{steps}") + + if steps > 64: + max_res = math.floor(math.sqrt(math.sqrt(mem_free_total / 2.5)) / 8) * 64 + raise RuntimeError(f'Not enough memory, use lower resolution (max approx. {max_res}x{max_res}). ' + f'Need: {mem_required / 64 / gb:0.1f}GB free, Have:{mem_free_total / gb:0.1f}GB free') + + slice_size = q.shape[1] // steps if (q.shape[1] % steps) == 0 else q.shape[1] + for i in range(0, q.shape[1], slice_size): + end = i + slice_size + s1 = einsum('b i d, b j d -> b i j', q[:, i:end], k) + + # OURS: apply weights to attention + if weights is not None: + bias = weights.to(s1.dtype).log().clamp(min=torch.finfo(s1.dtype).min) + s1 = s1 + bias + del bias + + s2 = s1.softmax(dim=-1, dtype=q.dtype) + del s1 + + r1[:, i:end] = einsum('b i j, b j d -> b i d', s2, v) + del s2 + + del q, k, v + + r1 = r1.to(dtype) + + r2 = rearrange(r1, '(b h) n d -> b n (h d)', h=h) + del r1 + + return self.to_out(r2) diff --git a/extensions/CHECK/sd-webui-fabric/setup.py b/extensions/CHECK/sd-webui-fabric/setup.py new file mode 100644 index 0000000000000000000000000000000000000000..e69de29bb2d1d6434b8b29ae775ad8c2e48c5391 diff --git a/extensions/CHECK/sd-webui-fabric/static/example_1_after.png b/extensions/CHECK/sd-webui-fabric/static/example_1_after.png new file mode 100644 index 0000000000000000000000000000000000000000..3504a50b331a6a9f3a3e79ca9681e42499b08a0d Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_1_after.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_1_before.png b/extensions/CHECK/sd-webui-fabric/static/example_1_before.png new file mode 100644 index 0000000000000000000000000000000000000000..6404accb621b7eb8e1098bd6b6ca467208b6b7c9 Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_1_before.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_1_feedback.png b/extensions/CHECK/sd-webui-fabric/static/example_1_feedback.png new file mode 100644 index 0000000000000000000000000000000000000000..2f8c83a4365d55e533112546dd57eaffc47472b6 Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_1_feedback.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_2_baseline.png b/extensions/CHECK/sd-webui-fabric/static/example_2_baseline.png new file mode 100644 index 0000000000000000000000000000000000000000..5ebede71458439542ae1ce69471138ab0479aeaa Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_2_baseline.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_2_custom.png b/extensions/CHECK/sd-webui-fabric/static/example_2_custom.png new file mode 100644 index 0000000000000000000000000000000000000000..44f43c11125ce0a859c92e3f4da3cc11b300b675 Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_2_custom.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_2_default.png b/extensions/CHECK/sd-webui-fabric/static/example_2_default.png new file mode 100644 index 0000000000000000000000000000000000000000..b67f63a4af3c812772fef8c7bbd1776f6cb3b2cf --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/static/example_2_default.png @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:0de1e1bb2cb9d865922875b39a405b2305247cbf4fbe3e7d93250af416352360 +size 1109568 diff --git a/extensions/CHECK/sd-webui-fabric/static/example_2_feedback.png b/extensions/CHECK/sd-webui-fabric/static/example_2_feedback.png new file mode 100644 index 0000000000000000000000000000000000000000..9c10755929eeffdc4e50f9604a78537b7337b8d7 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/static/example_2_feedback.png @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:7df03500faae3c20ce1d173ba705dc0abaf5b4d0fb99258ff7339d6225478326 +size 1198485 diff --git a/extensions/CHECK/sd-webui-fabric/static/example_3_00.png b/extensions/CHECK/sd-webui-fabric/static/example_3_00.png new file mode 100644 index 0000000000000000000000000000000000000000..e78a7be48d12d5bc0f2c2dce42e0424b5b16e1e0 Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_3_00.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_3_02.png b/extensions/CHECK/sd-webui-fabric/static/example_3_02.png new file mode 100644 index 0000000000000000000000000000000000000000..41e3fdc6ef788751d90b8f4182133d34086b99be Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_3_02.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_3_04.png b/extensions/CHECK/sd-webui-fabric/static/example_3_04.png new file mode 100644 index 0000000000000000000000000000000000000000..7f43542c8644f75dde0c277b9b3a7b2cababdc0e Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_3_04.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_3_06.png b/extensions/CHECK/sd-webui-fabric/static/example_3_06.png new file mode 100644 index 0000000000000000000000000000000000000000..369f9cef9d02fb8688c005555d8b921c948a1664 Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_3_06.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_3_08.png b/extensions/CHECK/sd-webui-fabric/static/example_3_08.png new file mode 100644 index 0000000000000000000000000000000000000000..72a6d910142a4bb9962cd83797bfbf1ac2fea949 Binary files /dev/null and b/extensions/CHECK/sd-webui-fabric/static/example_3_08.png differ diff --git a/extensions/CHECK/sd-webui-fabric/static/example_3_10.png b/extensions/CHECK/sd-webui-fabric/static/example_3_10.png new file mode 100644 index 0000000000000000000000000000000000000000..58496d4b639e64acc77f27bfc5b614cc30fab7e3 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/static/example_3_10.png @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:7bd5b95785d31f04eeb0d47997dcfc18b66ad841ef9d0215916e7feeedb8a2b9 +size 1008360 diff --git a/extensions/CHECK/sd-webui-fabric/static/example_3_feedback.png b/extensions/CHECK/sd-webui-fabric/static/example_3_feedback.png new file mode 100644 index 0000000000000000000000000000000000000000..e393f19bd331be697c06e8969eaabd9f766dae64 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/static/example_3_feedback.png @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:11dc3ec5619bdb2d052b5985db800c6f67432eee4fcf4f4359f4e41bdd6cf34d +size 1023778 diff --git a/extensions/CHECK/sd-webui-fabric/static/fabric_demo.gif b/extensions/CHECK/sd-webui-fabric/static/fabric_demo.gif new file mode 100644 index 0000000000000000000000000000000000000000..76e01c711b0b92970ab21fb20eba4f0a809e7c71 --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/static/fabric_demo.gif @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:17c2be3cc307c0393f85c533773cbd4dc2731fea9eeba12428cf1738627e31be +size 1532019 diff --git a/extensions/CHECK/sd-webui-fabric/style.css b/extensions/CHECK/sd-webui-fabric/style.css new file mode 100644 index 0000000000000000000000000000000000000000..726c975d4e753a81de201649a53985327a19d3cf --- /dev/null +++ b/extensions/CHECK/sd-webui-fabric/style.css @@ -0,0 +1,8 @@ + +#fabric_like_gallery img, #fabric_dislike_gallery img { + object-fit: scale-down; +} + +#fabric { + --layout-gap: 0.75rem; +} \ No newline at end of file diff --git a/extensions/CHECK/sd-webui-llul/.gitignore b/extensions/CHECK/sd-webui-llul/.gitignore new file mode 100644 index 0000000000000000000000000000000000000000..9f94e5dd988b2944cb27eeaa23ca1cf68e869d8c --- /dev/null +++ b/extensions/CHECK/sd-webui-llul/.gitignore @@ -0,0 +1,2 @@ +.vscode +__pycache__ diff --git a/extensions/CHECK/sd-webui-llul/LICENSE b/extensions/CHECK/sd-webui-llul/LICENSE new file mode 100644 index 0000000000000000000000000000000000000000..d1e1072ee5e1d109c15b6fd18756aedc2a401840 --- /dev/null +++ b/extensions/CHECK/sd-webui-llul/LICENSE @@ -0,0 +1 @@ +MIT License diff --git a/extensions/CHECK/sd-webui-llul/README.md b/extensions/CHECK/sd-webui-llul/README.md new file mode 100644 index 0000000000000000000000000000000000000000..165698dcdb2b2ced0ed8ebef3f49e84823f99996 --- /dev/null +++ b/extensions/CHECK/sd-webui-llul/README.md @@ -0,0 +1,43 @@ +# LLuL - Local Latent upscaLer + + + +https://user-images.githubusercontent.com/120772120/221390831-9fbccdf8-5898-4515-b988-d6733e8af3f1.mp4 + +## What is this? + +This is an extension for [stable-diffusion-webui](https://github.com/AUTOMATIC1111/stable-diffusion-webui) which lets you to upscale latents locally. + +See above image. This is all what this extension does. + +## Usage + +1. Select `Enabled` checkbox. +2. Move gray box where you want to apply upscaling. +3. Generate image. + +## Examples + + + + + + + + + +- Weight 0.00 -> 0.20 Animation + +https://user-images.githubusercontent.com/120772120/221390834-7e2c1a1a-d7a6-46b0-8949-83c4d5839c33.mp4 + +## Mask + +The mask is now available. + +Each pixel values of the mask are treated as the scale factors of the interpolation weight. White is 1.0 (enabled), black is 0.0 (disabled) and gray reduces the weights. + + + +## How it works + + diff --git a/extensions/CHECK/sd-webui-llul/images/cover.jpg b/extensions/CHECK/sd-webui-llul/images/cover.jpg new file mode 100644 index 0000000000000000000000000000000000000000..3e13d93d6984aa153412ff2e8bbfdd6326893726 Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/cover.jpg differ diff --git a/extensions/CHECK/sd-webui-llul/images/cover.mp4 b/extensions/CHECK/sd-webui-llul/images/cover.mp4 new file mode 100644 index 0000000000000000000000000000000000000000..39fec8b725874eb3275935316c9dda7e469b41cc Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/cover.mp4 differ diff --git a/extensions/CHECK/sd-webui-llul/images/cover_yuv420p.mp4 b/extensions/CHECK/sd-webui-llul/images/cover_yuv420p.mp4 new file mode 100644 index 0000000000000000000000000000000000000000..43f5f7718f90e4e55f7f5cd245e80610405912bd Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/cover_yuv420p.mp4 differ diff --git a/extensions/CHECK/sd-webui-llul/images/desc.png b/extensions/CHECK/sd-webui-llul/images/desc.png new file mode 100644 index 0000000000000000000000000000000000000000..c827387deef8067d76629f380018b4cccc3b2fc3 Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/desc.png differ diff --git a/extensions/CHECK/sd-webui-llul/images/llul.mp4 b/extensions/CHECK/sd-webui-llul/images/llul.mp4 new file mode 100644 index 0000000000000000000000000000000000000000..b344c4a94dd832886ec4de44738343059227ad88 Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/llul.mp4 differ diff --git a/extensions/CHECK/sd-webui-llul/images/llul_yuv420p.mp4 b/extensions/CHECK/sd-webui-llul/images/llul_yuv420p.mp4 new file mode 100644 index 0000000000000000000000000000000000000000..30893a1dc0676b83572946f4cd711f533908a20f --- /dev/null +++ b/extensions/CHECK/sd-webui-llul/images/llul_yuv420p.mp4 @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:69b7ac823e0f0e5759886137708ab7cc62521baa2d9917f5c9a551fded46ac5e +size 1341189 diff --git a/extensions/CHECK/sd-webui-llul/images/mask_effect.jpg b/extensions/CHECK/sd-webui-llul/images/mask_effect.jpg new file mode 100644 index 0000000000000000000000000000000000000000..9d7232768bebc576d77524be16632d611e830680 --- /dev/null +++ b/extensions/CHECK/sd-webui-llul/images/mask_effect.jpg @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:8e4b6d4218a38fadeb7d2fa3502f247804b3dc2ffb344e6d9506f2107aa62c5c +size 1098988 diff --git a/extensions/CHECK/sd-webui-llul/images/sample1.jpg b/extensions/CHECK/sd-webui-llul/images/sample1.jpg new file mode 100644 index 0000000000000000000000000000000000000000..bcfab5b07db02f77c8bb660c6b3bc40a8cd89eba Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/sample1.jpg differ diff --git a/extensions/CHECK/sd-webui-llul/images/sample2.jpg b/extensions/CHECK/sd-webui-llul/images/sample2.jpg new file mode 100644 index 0000000000000000000000000000000000000000..34fed788497190604fdb28cd9ce16af5b2af0a41 Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/sample2.jpg differ diff --git a/extensions/CHECK/sd-webui-llul/images/sample3.jpg b/extensions/CHECK/sd-webui-llul/images/sample3.jpg new file mode 100644 index 0000000000000000000000000000000000000000..3b7b173006ec6336d623adf01e3c2c4472ca4a21 Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/sample3.jpg differ diff --git a/extensions/CHECK/sd-webui-llul/images/sample4.jpg b/extensions/CHECK/sd-webui-llul/images/sample4.jpg new file mode 100644 index 0000000000000000000000000000000000000000..60657fc1bfb160c578d8a5ce629940324e31b638 Binary files /dev/null and b/extensions/CHECK/sd-webui-llul/images/sample4.jpg differ diff --git a/extensions/CHECK/sd-webui-llul/javascript/llul.js b/extensions/CHECK/sd-webui-llul/javascript/llul.js new file mode 100644 index 0000000000000000000000000000000000000000..9ba48f7213a690787bc4e1b9e376cfaaccb916bd --- /dev/null +++ b/extensions/CHECK/sd-webui-llul/javascript/llul.js @@ -0,0 +1,269 @@ +(function () { + + if (!globalThis.LLuL) globalThis.LLuL = {}; + const LLuL = globalThis.LLuL; + + function id(type, s) { + return `llul-${type}-${s}`; + } + + function isDark() { + return gradioApp().querySelector('.dark') !== null; + } + + const M = 2; + function setSize(canvas, width, height) { + width = Math.floor(+width / M); + height = Math.floor(+height / M); + if (canvas.width != width) canvas.width = width; + if (canvas.height != height) canvas.height = height; + } + + function updateXY(canvas) { + let x = +canvas.dataset.x, + y = +canvas.dataset.y, + m = +canvas.dataset.m, + mm = Math.pow(2, m), + w = +canvas.width * M, + h = +canvas.height * M; + if (x < 0) x = 0; + if (w < x + w / mm) x = Math.floor(w - w / mm); + if (y < 0) y = 0; + if (h < y + h / mm) y = Math.floor(h - h / mm); + + canvas.dataset.x = x; + canvas.dataset.y = y; + canvas.dataset.m = m; + + canvas.parentNode.querySelector('.llul-pos-x').value = x; + canvas.parentNode.querySelector('.llul-pos-y').value = y; + } + + let last_image = new Image(); + let hide_image = true; + async function draw(canvas) { + const + x = +canvas.dataset.x, + y = +canvas.dataset.y, + m = +canvas.dataset.m, + mm = Math.pow(2, m), + w = +canvas.width, + h = +canvas.height, + bg = canvas.dataset.bg; + + const ctx = canvas.getContext('2d'); + + if (bg) { + if (last_image?.src === bg) { + // do nothing + } else { + await (new Promise(resolve => { + last_image.onload = () => resolve(); + last_image.src = bg; + })); + } + hide_image = false; + } else { + last_image.src = ''; + hide_image = true; + } + + if (last_image.src && !hide_image) { + ctx.drawImage(last_image, 0, 0, +last_image.width, +last_image.height, 0, 0, +canvas.width, +canvas.height); + } else { + const bgcolor = isDark() ? 'black' : 'white'; + ctx.fillStyle = bgcolor; + ctx.fillRect(0, 0, +canvas.width, +canvas.height); + } + + ctx.fillStyle = 'gray'; + ctx.fillRect(x / M, y / M, Math.floor(w / mm), Math.floor(h / mm)); + } + + async function update_gradio(type, canvas) { + await LLuL.js2py(type, 'x', +canvas.dataset.x); + await LLuL.js2py(type, 'y', +canvas.dataset.y); + } + + function init(type) { + const $$ = (x,n) => Array.from(gradioApp().querySelectorAll(x)).at(n); + const $ = x => $$(x, -1); + + if (!$('#' + id(type, 'accordion'))) return false; + + const cont = $('#' + id(type, 'container')); + const x = $('#' + id(type, 'x')); + const y = $('#' + id(type, 'y')); + const m = $(`#${id(type, 'm')} input[type=number]`); + const ms = $(`#${id(type, 'm')} input[type=range]`); + if (!cont || !x || !y || !m || !ms) return false; + + if (cont.querySelector('canvas')) return true; // already called + + const width = $$(`#${type}_width input[type=number]`, 0); + const height = $$(`#${type}_height input[type=number]`, 0); + const width2 = $$(`#${type}_width input[type=range]`, 0); + const height2 = $$(`#${type}_height input[type=range]`, 0); + + const pos_x = Math.floor(+width.value / 4); + const pos_y = Math.floor(+height.value / 4); + + const pos_cont = document.createElement('div'); + pos_cont.innerHTML = ` +
changeable blocks : BASE,IN00,IN01,IN02,IN03,IN04,IN05,IN06,IN07,IN08,IN09,IN10,IN11,M00,OUT00,OUT01,OUT02,OUT03,OUT04,OUT05,OUT06,OUT07,OUT08,OUT09,OUT10,OUT11
') + xyzsetting = gr.Radio(label = "Active",choices = ["Disable","XYZ plot","Effective Block Analyzer"], value ="Disable",type = "index") + with gr.Row(visible = False) as esets: + diffcol = gr.Radio(label = "diff image color",choices = ["black","white"], value ="black",type = "value",interactive =True) + revxy = gr.Checkbox(value = False,label="change X-Y",interactive =True,elem_id="lbw_changexy") + thresh = gr.Textbox(label="difference threshold",lines=1,value="20",interactive =True,elem_id="diff_thr") + xtype = gr.Dropdown(label="X Types", choices=[x for x in ATYPES], value=ATYPES [2],interactive =True,elem_id="lbw_xtype") + xmen = gr.Textbox(label="X Values",lines=1,value="0,0.25,0.5,0.75,1",interactive =True,elem_id="lbw_xmen") + ytype = gr.Dropdown(label="Y Types", choices=[y for y in ATYPES], value=ATYPES [1],interactive =True,elem_id="lbw_ytype") + ymen = gr.Textbox(label="Y Values" ,lines=1,value="IN05-OUT05",interactive =True,elem_id="lbw_ymen") + ztype = gr.Dropdown(label="Z type", choices=[z for z in ATYPES], value=ATYPES[0],interactive =True,elem_id="lbw_ztype") + zmen = gr.Textbox(label="Z values",lines=1,value="",interactive =True,elem_id="lbw_zmen") + + exmen = gr.Textbox(label="Range",lines=1,value="0.5,1",interactive =True,elem_id="lbw_exmen",visible = False) + eymen = gr.Textbox(label="Blocks (12ALL,17ALL,20ALL,26ALL also can be used)" ,lines=1,value="BASE,IN00,IN01,IN02,IN03,IN04,IN05,IN06,IN07,IN08,IN09,IN10,IN11,M00,OUT00,OUT01,OUT02,OUT03,OUT04,OUT05,OUT06,OUT07,OUT08,OUT09,OUT10,OUT11",interactive =True,elem_id="lbw_eymen",visible = False) + ecount = gr.Number(value=1, label="number of seed", interactive=True, visible = True) + + with gr.Accordion("Weights setting",open = True): + with gr.Row(): + reloadtext = gr.Button(value="Reload Presets",variant='primary',elem_id="lbw_reload") + reloadtags = gr.Button(value="Reload Tags",variant='primary',elem_id="lbw_reload") + savetext = gr.Button(value="Save Presets",variant='primary',elem_id="lbw_savetext") + openeditor = gr.Button(value="Open TextEditor",variant='primary',elem_id="lbw_openeditor") + lbw_loraratios = gr.TextArea(label="",value=lbwpresets,visible =True,interactive = True,elem_id="lbw_ratiospreset") + + with gr.Accordion("Elemental",open = False): + with gr.Row(): + e_reloadtext = gr.Button(value="Reload Presets",variant='primary',elem_id="lbw_reload") + e_savetext = gr.Button(value="Save Presets",variant='primary',elem_id="lbw_savetext") + e_openeditor = gr.Button(value="Open TextEditor",variant='primary',elem_id="lbw_openeditor") + elemsets = gr.Checkbox(value = False,label="print change",interactive =True,elem_id="lbw_print_change") + elemental = gr.TextArea(label="Identifer:BlockID:Elements:Ratio,...,separated by empty line ",value = elempresets,interactive =True,elem_id="element") + + d_true = gr.Checkbox(value = True,visible = False) + d_false = gr.Checkbox(value = False,visible = False) + + with gr.Accordion("Make Weights",open = False): + with gr.Row(): + m_text = gr.Textbox(value="",label="Weights") + with gr.Row(): + m_add = gr.Button(value="Add to presets",size="sm",variant='primary') + m_add_save = gr.Button(value="Add to presets and Save",size="sm",variant='primary') + m_name = gr.Textbox(value="",label="Identifier") + with gr.Row(): + m_type = gr.Radio(label="Weights type",choices=["17(1.X/2.X)", "26(1.X/2.X full)", "12(XL)","20(XL full)"], value="17(1.X/2.X)") + with gr.Row(): + m_set_0 = gr.Button(value="Set All 0",variant='primary') + m_set_1 = gr.Button(value="Set All 1",variant='primary') + m_custom = gr.Button(value="Set custom",variant='primary') + m_custom_v = gr.Slider(show_label=False, minimum=-1.0, maximum=1, step=0.1, value=0, interactive=True) + with gr.Row(): + with gr.Column(scale=1, min_width=100): + gr.Slider(visible=False) + with gr.Column(scale=2, min_width=200): + base = gr.Slider(label="BASE", minimum=-1, maximum=1, step=0.1, value=0.0) + with gr.Column(scale=1, min_width=100): + gr.Slider(visible=False) + with gr.Row(): + with gr.Column(scale=2, min_width=200): + ins = [gr.Slider(label=block, minimum=-1.0, maximum=1, step=0.1, value=0, interactive=True) for block in BLOCKID26[1:13]] + with gr.Column(scale=2, min_width=200): + outs = [gr.Slider(label=block, minimum=-1.0, maximum=1, step=0.1, value=0, interactive=True) for block in reversed(BLOCKID26[14:])] + with gr.Row(): + with gr.Column(scale=1, min_width=100): + gr.Slider(visible=False) + with gr.Column(scale=2, min_width=200): + m00 = gr.Slider(label="M00", minimum=-1, maximum=1, step=0.1, value=0.0) + with gr.Column(scale=1, min_width=100): + gr.Slider(visible=False) + + blocks = [base] + ins + [m00] + outs[::-1] + for block in blocks: + if block.label not in BLOCKID17: + block.visible = False + + m_set_0.click(fn=lambda x:[0]*26 + [",".join(["0"]*int(x[:2]))],inputs=[m_type],outputs=blocks + [m_text]) + m_set_1.click(fn=lambda x:[1]*26 + [",".join(["1"]*int(x[:2]))],inputs=[m_type],outputs=blocks + [m_text]) + m_custom.click(fn=lambda x,y:[x]*26 + [",".join([str(x)]*int(y[:2]))],inputs=[m_custom_v,m_type],outputs=blocks + [m_text]) + + def addweights(weights, id, presets, save = False): + if id == "":id = "NONAME" + lines = presets.strip().split("\n") + id_found = False + for i, line in enumerate(lines): + if line.startswith("#"): + continue + if line.split(":")[0] == id: + lines[i] = f"{id}:{weights}" + id_found = True + break + if not id_found: + lines.append(f"{id}:{weights}") + + if save: + with open(extpath,mode = 'w',encoding="utf-8") as f: + f.write("\n".join(lines)) + + return "\n".join(lines) + + def changetheblocks(sdver,*blocks): + sdver = int(sdver[:2]) + output = [] + targ_blocks = BLOCKIDS[BLOCKNUMS.index(sdver)] + for i, block in enumerate(BLOCKID26): + if block in targ_blocks: + output.append(str(blocks[i])) + return [",".join(output)] + [gr.update(visible = True if block in targ_blocks else False) for block in BLOCKID26] + + m_add.click(fn=addweights, inputs=[m_text,m_name,lbw_loraratios],outputs=[lbw_loraratios]) + m_add_save.click(fn=addweights, inputs=[m_text,m_name,lbw_loraratios, d_true],outputs=[lbw_loraratios]) + m_type.change(fn=changetheblocks, inputs=[m_type] + blocks,outputs=[m_text] + blocks) + + d_true = gr.Checkbox(value = True,visible = False) + d_false = gr.Checkbox(value = False,visible = False) + + lbw_useblocks.change(fn=lambda x:gr.update(label = f"LoRA Block Weight : {'Active' if x else 'Not Active'}"),inputs=lbw_useblocks, outputs=[acc]) + + def makeweights(sdver, *blocks): + sdver = int(sdver[:2]) + output = [] + targ_blocks = BLOCKIDS[BLOCKNUMS.index(sdver)] + for i, block in enumerate(BLOCKID26): + if block in targ_blocks: + output.append(str(blocks[i])) + return ",".join(output) + + changes = [b.release(fn=makeweights,inputs=[m_type] + blocks,outputs=[m_text]) for b in blocks] + + import subprocess + def openeditors(b): + path = extpath if b else extpathe + subprocess.Popen(['start', path], shell=True) + + def reloadpresets(isweight): + if isweight: + try: + with open(extpath,encoding="utf-8") as f: + return f.read() + except OSError as e: + pass + else: + try: + with open(extpath,encoding="utf-8") as f: + return f.read() + except OSError as e: + pass + + def tagdicter(presets): + presets=presets.splitlines() + wdict={} + for l in presets: + if checkloadcond(l) : continue + w=[] + if ":" in l : + key = l.split(":",1)[0] + w = l.split(":",1)[1] + if any(len([w for w in w.split(",")]) == x for x in BLOCKNUMS): + wdict[key.strip()]=w + return ",".join(list(wdict.keys())) + + def savepresets(text,isweight): + if isweight: + with open(extpath,mode = 'w',encoding="utf-8") as f: + f.write(text) + else: + with open(extpathe,mode = 'w',encoding="utf-8") as f: + f.write(text) + + reloadtext.click(fn=reloadpresets,inputs=[d_true],outputs=[lbw_loraratios]) + reloadtags.click(fn=tagdicter,inputs=[lbw_loraratios],outputs=[bw_ratiotags]) + savetext.click(fn=savepresets,inputs=[lbw_loraratios,d_true],outputs=[]) + openeditor.click(fn=openeditors,inputs=[d_true],outputs=[]) + + e_reloadtext.click(fn=reloadpresets,inputs=[d_false],outputs=[elemental]) + e_savetext.click(fn=savepresets,inputs=[elemental,d_false],outputs=[]) + e_openeditor.click(fn=openeditors,inputs=[d_false],outputs=[]) + + def urawaza(active): + if active > 0: + register() + scripts.scripts_txt2img.run = newrun + scripts.scripts_img2img.run = newrun + if active == 1:return [*[gr.update(visible = True) for x in range(6)],*[gr.update(visible = False) for x in range(4)]] + else:return [*[gr.update(visible = False) for x in range(6)],*[gr.update(visible = True) for x in range(4)]] + else: + scripts.scripts_txt2img.run = runorigin + scripts.scripts_img2img.run = runorigini + return [*[gr.update(visible = True) for x in range(6)],*[gr.update(visible = False) for x in range(4)]] + + xyzsetting.change(fn=urawaza,inputs=[xyzsetting],outputs =[xtype,xmen,ytype,ymen,ztype,zmen,exmen,eymen,ecount,esets]) + + return lbw_loraratios,lbw_useblocks,xyzsetting,xtype,xmen,ytype,ymen,ztype,zmen,exmen,eymen,ecount,diffcol,thresh,revxy,elemental,elemsets,debug + + def process(self, p, loraratios,useblocks,xyzsetting,xtype,xmen,ytype,ymen,ztype,zmen,exmen,eymen,ecount,diffcol,thresh,revxy,elemental,elemsets,debug): + #print("self =",self,"p =",p,"presets =",loraratios,"useblocks =",useblocks,"xyzsettings =",xyzsetting,"xtype =",xtype,"xmen =",xmen,"ytype =",ytype,"ymen =",ymen,"ztype =",ztype,"zmen =",zmen) + #Note that this does not use the default arg syntax because the default args are supposed to be at the end of the function + if(loraratios == None): + loraratios = DEF_WEIGHT_PRESET + if(useblocks == None): + useblocks = True + + lorachecker(self) + self.log["enable LBW"] = useblocks + self.log["registerd"] = registerd + + if useblocks: + self.active = True + loraratios=loraratios.splitlines() + elemental = elemental.split("\n\n") if elemental is not None else [] + lratios={} + elementals={} + for l in loraratios: + if checkloadcond(l) : continue + l0=l.split(":",1)[0] + lratios[l0.strip()]=l.split(":",1)[1] + for e in elemental: + if ":" not in e: continue + e0=e.split(":",1)[0] + elementals[e0.strip()]=e.split(":",1)[1] + if elemsets : print(xyelem) + if xyzsetting and "XYZ" in p.prompt: + lratios["XYZ"] = lxyz + lratios["ZYX"] = lzyx + if xyelem != "": + if "XYZ" in elementals.keys(): + elementals["XYZ"] = elementals["XYZ"] + ","+ xyelem + else: + elementals["XYZ"] = xyelem + self.lratios = lratios + self.elementals = elementals + global princ + princ = elemsets + + if not hasattr(self,"lbt_dr_callbacks"): + self.lbt_dr_callbacks = on_cfg_denoiser(self.denoiser_callback) + + def denoiser_callback(self, params: CFGDenoiserParams): + def setparams(self, key, te, u ,sets): + for dicts in [self.lora,self.lycoris,self.networks]: + for lora in dicts: + if lora.name.split("_in_LBW_")[0] == key: + lora.te_multiplier = te + lora.unet_multiplier = u + sets.append(key) + + if forge and self.active: + if params.sampling_step in self.startsf: + shared.sd_model.forge_objects.unet.unpatch_model(device_to=devices.device) + for key, vals in shared.sd_model.forge_objects.unet.patches.items(): + n_vals = [] + lvals = [val for val in vals if val[1][0] in LORAS] + for s, v, m, l, e in zip(self.startsf, lvals, self.uf, self.lf, self.ef): + if s is not None and s == params.sampling_step: + ratio, errormodules = ratiodealer(key.replace(".","_"), l, e) + n_vals.append((ratio * m, *v[1:])) + else: + n_vals.append(v) + shared.sd_model.forge_objects.unet.patches[key] = n_vals + shared.sd_model.forge_objects.unet.patch_model() + + if params.sampling_step in self.stopsf: + shared.sd_model.forge_objects.unet.unpatch_model(device_to=devices.device) + for key, vals in shared.sd_model.forge_objects.unet.patches.items(): + n_vals = [] + lvals = [val for val in vals if val[1][0] in LORAS] + for s, v, m, l, e in zip(self.stopsf, lvals, self.uf, self.lf, self.ef): + if s is not None and s == params.sampling_step: + n_vals.append((0, *v[1:])) + else: + n_vals.append(v) + shared.sd_model.forge_objects.unet.patches[key] = n_vals + shared.sd_model.forge_objects.unet.patch_model() + + elif self.active: + if self.starts and params.sampling_step == 0: + for key, step_te_u in self.starts.items(): + setparams(self, key, 0, 0, []) + #print("\nstart 0", self, key, 0, 0, []) + + if self.starts: + sets = [] + for key, step_te_u in self.starts.items(): + step, te, u = step_te_u + if params.sampling_step > step - 2: + setparams(self, key, te, u, sets) + #print("\nstart", self, key, u, te, sets) + for key in sets: + if key in self.starts: + del self.starts[key] + + if self.stops: + sets = [] + for key, step in self.stops.items(): + if params.sampling_step > step - 2: + setparams(self, key, 0, 0, sets) + #print("\nstop", self, key, 0, 0, sets) + for key in sets: + if key in self.stops: + del self.stops[key] + + def before_process_batch(self, p, loraratios,useblocks,*args,**kwargs): + if useblocks: + resetmemory() + if not self.isnet: p.disable_extra_networks = False + global prompts + prompts = kwargs["prompts"].copy() + + def process_batch(self, p, loraratios,useblocks,*args,**kwargs): + if useblocks: + if not self.isnet: p.disable_extra_networks = True + + o_prompts = [p.prompt] + for prompt in prompts: + if "+
+  +
+
+ +## Hires.fix 連動機能 + +- Hires.fixのオン/オフに連動して他の機能のオン/オフを切り替えます。 +- Hires.fixボタンの上に各機能のチェックボックスが追加されます。 +- Hires.fix with ♻️ & ADetailer: チェックボックスがオンの場合、Hires.fixに連動して♻️(Reuse seed)とADetailerを切り替えます。ADetailerがインストールされていない場合は♻️(Reuse seed)のみ連動します。 +- Hires.fix with ADetailer: チェックがオンの場合、Hires.fix に連動してADetailerを切り替えます。ADetailerがインストールされていない場合は非表示となります。 +- Hires.fix with Tiled VAE: チェックボックスがオンの場合、Hires.fix に連動してTiled VAEを切り替えます。Forge及び、Tiled VAEがインストールされていない場合は非表示となります。 +- Reuse delay time: シード再利用生成ボタンを使用した時、シードが再利用されなかった場合はこの値を大きくしてください。初期値は500(msec)です。 +
+
+  +
+
+ +# インストール方法 + +AUTOMATIC1111のExtensionsタブをクリック、Install from URLタブをクリックし、URL for extension's git repositoryに以下のurlを入力しInstallボタンをクリックしてください。 + +``` +https://github.com/Takenoko3333/sd-webui-reuse-seed-plus.git +``` + +
+ +# 変更履歴 + +## [0.3.0] - 2024-7-28 + +### 追加, 修正 + +- ADetailerの仕様変更で連動しない問題を修正 +- 非対応の機能を非表示にする対応 +- シード再利用生成ボタン使用時の遅延時間を変更できる機能を追加 +- READMEの誤字を修正 + +## [0.2.0] - 2024-6-8 + +### 追加, 修正 + +- 機能付き生成ボタン(🎲, ♻️, +1)を追加 +- Hires.fix 連動機能に'Hires.fix ADetailer', 'Hires.fix with Tiled VAE'を追加 +- 文言を修正 + +## [0.1.4] - 2024-6-6 + +### 修正 + +- チェックボックスのidを修正 +- チェックボックスのセレクターを修正 + +## [0.1.3] - 2024-6-6 + +### 修正 + +- 関数を修正 + +## [0.1.2] - 2024-6-6 + +### 修正 + +- cssを修正 + +## [0.1.1] - 2024-6-6 + +### 修正 + +- READMEを修正 + +## [0.1.0] - 2024-6-6 + +### 追加 + +- v0.1.0リリース +
+ +# ライセンス + +Copyright © 2024 Takenoko +Released under the [MIT License](https://opensource.org/licenses/mit-license.php). +
+ +# English + +# Description + +## Adding Functional Generation Buttons + +- Three functional generation buttons will be added to the txt2img and img2img screens. +- 🎲: Generates with a new seed set randomly. +- ♻️: Reuses the seed from the previous generation if available. +- +1: Adds 1 to the current seed if a seed is set. If the seed is -1, this button is disabled. +
+
+
+
+ +## Hires.fix Integration Feature + +- The other functions are switched on and off in conjunction with the Hires.fix on/off. +- A checkbox for each function is added above the Hires.fix button. +- Hires.fix with ♻️ & ADetailer: If the checkbox is on, switches ♻️ (Reuse seed) and ADetailer in conjunction with Hires.fix. If ADetailer is not installed, only ♻️ (Reuse seed) is linked. +- Hires.fix with ADetailer: if checked, switches ADetailer in conjunction with Hires.fix; if ADetailer is not installed, it is hidden. +- Hires.fix with Tiled VAE: if checked, switches Tiled VAE in conjunction with Hires.fix, hidden if Forge and Tiled VAE are not installed. +- Reuse delay time: increase this value if the seed is not reused when using the Generate Seed Reuse button. The default value is 500 (msec). +
+
+
+
+ +# Installation Instructions + +Click on the Extensions tab in AUTOMATIC1111, then click on the Install from URL tab. Enter the following URL in the URL for extension's git repository field and click the Install button. + +``` +https://github.com/Takenoko3333/sd-webui-reuse-seed-plus.git +``` + +
+ +# Change Log + +## [0.3.0] - 2024-7-28 + +### Additions, Fixes. + +- Fixes issues not linked to ADetailer specification changes. +- Support for hiding unsupported functions. +- Added function to change the delay time when using the seed reuse generation button +- Fixed typos in README + +## [0.2.0] - 2024-6-8 + +### Add and Fixed + +- Added functional generation buttons (🎲, ♻️, +1) +- Added 'Hires.fix ADetailer' and 'Hires.fix with Tiled VAE' to the Hires.fix integration feature +- Revised text and wording + +# Changelog + +## [0.1.4] - 2024-6-6 + +### Fixed + +- Fixed chexbox id name +- Fixed chexbox selector + +## [0.1.3] - 2024-6-6 + +### Fixed + +- Fixed function + +## [0.1.2] - 2024-6-6 + +### Fixed + +- Fixed css + +## [0.1.1] - 2024-6-6 + +### Fixed + +- Fixed README + +## [0.1.0] - 2024-6-6 + +### Added + +- v0.1.0 release + +# License + +Copyright © 2024 Takenoko +Released under the [MIT License](https://opensource.org/licenses/mit-license.php). diff --git a/extensions/CHECK/sd-webui-reuse-seed-plus/images/image.png b/extensions/CHECK/sd-webui-reuse-seed-plus/images/image.png new file mode 100644 index 0000000000000000000000000000000000000000..b624d6dfc70b09e52020118c19c2d2bdefb314fb Binary files /dev/null and b/extensions/CHECK/sd-webui-reuse-seed-plus/images/image.png differ diff --git a/extensions/CHECK/sd-webui-reuse-seed-plus/images/image1.png b/extensions/CHECK/sd-webui-reuse-seed-plus/images/image1.png new file mode 100644 index 0000000000000000000000000000000000000000..adad2a733202e0105632e9cb423b529f9e04f593 Binary files /dev/null and b/extensions/CHECK/sd-webui-reuse-seed-plus/images/image1.png differ diff --git a/extensions/CHECK/sd-webui-reuse-seed-plus/images/image2.png b/extensions/CHECK/sd-webui-reuse-seed-plus/images/image2.png new file mode 100644 index 0000000000000000000000000000000000000000..c7fa84490e0eab9a8aa6d6e2cc625eb305c3f2f6 Binary files /dev/null and b/extensions/CHECK/sd-webui-reuse-seed-plus/images/image2.png differ diff --git a/extensions/CHECK/sd-webui-reuse-seed-plus/javascript/reuse-seed-plus.js b/extensions/CHECK/sd-webui-reuse-seed-plus/javascript/reuse-seed-plus.js new file mode 100644 index 0000000000000000000000000000000000000000..0fae09a0c1689846553951049f5719099dab7af2 --- /dev/null +++ b/extensions/CHECK/sd-webui-reuse-seed-plus/javascript/reuse-seed-plus.js @@ -0,0 +1,289 @@ +// Seed Reuse Generate button delay time +function reuseDelayTime() { + let reuseDelayTime = 500; + const reuseDelayTimeInput = document.getElementById("reuse-seed-delay-time"); + if (reuseDelayTimeInput) { + const reuseDelayTimeInputValue = reuseDelayTimeInput.value; + if (parseInt(reuseDelayTimeInputValue) != reuseDelayTime) + reuseDelayTime = parseInt(reuseDelayTimeInputValue); + } + return reuseDelayTime; +} + +// Add Generate Button (🎲, ♻, +1) to txt2img and img2img +function addButtons(tab) { + const normalDelayTime = 10; + const generateButton = document.getElementById(`${tab}_generate`); + const reuseSeedButton = document.getElementById(`${tab}_reuse_seed`); + const skipButton = document.getElementById(`${tab}_skip`); + const seedInput = document.querySelector(`#${tab}_seed > label > input`); + const buttonClass = "lg primary gradio-button svelte-cmf5ev"; + const randomGenerateButtonId = `${tab}_rsp_random_generate_button`; + const reuseGenerateButtonId = `${tab}_rsp_reuse_generate_button`; + const plus1GenerateButtonId = `${tab}_rsp_plus1_generate_button`; + + function createElementFromHTML(html, callback) { + const tempEl = document.createElement("div"); + tempEl.innerHTML = html; + const child = tempEl.firstElementChild; + child.addEventListener("click", callback); + return child; + } + + function delayGenerate(time = normalDelayTime) { + setTimeout(function () { + generateButton.click(); + }, time); + } + + const box = document.querySelector(`#${tab}_generate_box`); + box.style.gap = "4px"; + box.append( + createElementFromHTML( + ``, + function () { + seedInput.value = -1; + seedInput.dispatchEvent(new Event("input")); + delayGenerate(); + } + ) + ); + box.append( + createElementFromHTML( + ``, + function () { + reuseSeedButton.click(); + delayGenerate(reuseDelayTime()); + } + ) + ); + box.append( + createElementFromHTML( + ``, + function () { + if (seedInput.value != -1) { + seedInput.value = parseInt(seedInput.value) + 1; + seedInput.dispatchEvent(new Event("input")); + delayGenerate(); + } else { + } + } + ) + ); + + // Add css to skip button + skipButton.style.zIndex = 1; + + // Monitor seed + ["txt2img", "img2img"].forEach(function (tab) { + const seedInput = document.querySelector(`#${tab}_seed > label > input`); + const plus1GenerateButton = document.getElementById( + `${tab}_rsp_plus1_generate_button` + ); + setInterval(function () { + // console.log(seedInput.value); + if (plus1GenerateButton) { + if (seedInput.value === "-1") { + plus1GenerateButton.disabled = true; + } else { + plus1GenerateButton.disabled = false; + } + } + }, 1000); + }); +} + +// Add New Generate Butttons +function addNewGenerateButtons() { + addButtons("txt2img"); + addButtons("img2img"); +} + +// Add 'Hires.fix with ♻️ & ADetailer' checkbox to txt2img +function createReuseSeedPlusArea() { + const reuseSeedPlus = document.getElementById("reuse_seed_plus"); + const hiresFixCheckbox = document.getElementById( + "txt2img_hr-visible-checkbox" + ); + const settings = document.getElementById("txt2img_settings"); + const accordions = document.getElementById("txt2img_accordions"); + const adetailerCheckbox = + document.querySelector("#script_txt2img_adetailer_ad_enable input") || + document.querySelector( + "#script_txt2img_adetailer_ad_main_accordion-visible-checkbox" + ); + const tiledvaeCheckbox = document.getElementById( + "MDV-t2i-enabled-visible-checkbox" + ); + + if (!accordions || reuseSeedPlus) return; + + const reuseSeedPlusArea = document.createElement("div"); + reuseSeedPlusArea.id = "reuse_seed_plus"; + reuseSeedPlusArea.style = + "display: flex; flex-wrap: wrap; gap: 0.6em 1em; padding: 0.4em 0 0.2em"; + + // Create checkbox item + ["rsp_reuse_seed_plus", "rsp_adetailer", "rsp_tiled_vae"].forEach(function ( + idName, + index + ) { + if (idName === "rsp_adetailer" && !adetailerCheckbox) return; + if (idName === "rsp_tiled_vae" && !tiledvaeCheckbox) return; + + const labelTitle = [ + adetailerCheckbox + ? "Enable 'Reuse seed' and 'ADetailer' when enabling Hires.fix" + : "Enable 'Reuse seed' when enabling Hires.fix", + "Enable 'ADetailer' when enabling Hires.fix", + "Enable 'Tiled VAE' when enabling Hires.fix", + ]; + + const spanText = [ + adetailerCheckbox ? "Hires.fix with ♻️ & ADetailer" : "Hires.fix with ♻️", + "Hires.fix with ADetailer", + "Hires.fix with Tiled VAE", + ]; + const checkbox = document.createElement("input"); + checkbox.type = "checkbox"; + checkbox.id = `${idName}_toggle`; + checkbox.className = "svelte-1ojmf70"; + + const label = document.createElement("label"); + label.id = `${idName}_label}`; + label.className = "svelte-1ojmf70"; + label.style = "display: inline-block;"; + label.setAttribute("title", labelTitle[index]); + + const span = document.createElement("span"); + span.className = "ml-2 svelte-1ojmf70"; + span.textContent = spanText[index]; + + label.appendChild(checkbox); + label.appendChild(span); + reuseSeedPlusArea.appendChild(label); + }); + + reuseSeedPlusArea.innerHTML += ` +
+You can adjust the magnification of each weight block through the context menu.
+Note: The LoRA Block Weight extension is required to use this extension. + +## Installation + +1. Open the [Extensions] tab in Stable Diffusion Web UI. +2. Select [Install from URL]. +3. Enter the following URL and execute the installation. +``` +https://github.com/nihedon/sd-webui-weight-helper.git +``` + +## Usage + +1. Right-click on a Lora or Lyco tag to open the context menu. + - `
+コンテキストメニューを通じて各ウェイトブロックの倍率を調整できます。
+注:この拡張機能を利用するにはLoRA Block Weight拡張機能が必要です。 + +## インストール + +1. Stable Diffusion Web UIの[拡張機能]タブを開く +2. [URLからインストール]を選択 +3. 以下のURLを入力し、インストールを実行 +``` +https://github.com/nihedon/sd-webui-weight-helper.git +``` + +## 使い方 + +1. LoraまたはLycoのタグを右クリックしてコンテキストメニューを開く + - `
+*Params: Steps: 30, Sampler: DPM++ SDE Karras, CFG scale: 7.5, Seed: 918, Size: 512x640, Model: deliberate_v2*
+*Negative Prompt: Male* + + +*Prompt: portrait of zimby anton fadeev cyborg propaganda poster*
+*Params: Steps: 30, Sampler: DPM++ SDE Karras, CFG scale: 7.5, Seed: 918, Size: 512x640, Model: deliberate_v2*
+*Negative Prompt: Female* + +### Why Use This? + +This method was originally intended for decreasing the effect of the negative prompt, which is very hard or at times impossible to do with the currently available methods like Better Prompting™, Attention/Emphasis (using the '(prompt:weight)' syntax), Prompt Editing (using the [prompt1:prompt2:when] syntax), etc. But you can also use it with values higher than 1 and it will boost your negative prompt in its own style (you might need to lower your CFG scale a bit if you do that). + +Here is the first example compared to using the '(negative prompts: weight)' syntax (i.e. bottom row is (negative prompt:0),(negative prompt:0.25),etc.: + + + +Please have a look at the examples in the [comparisons](https://github.com/muerrilla/stable-diffusion-NPW#more-comparisons-and-stuff) section if you want to know how it's different from using '(prompt:weight)' and check out the discussion [here](https://github.com/AUTOMATIC1111/stable-diffusion-webui/issues/9220) if you need more context. + +## Installation + +Open SD WebUI > Go to Extensions tab > Go to Available > Press the big button > Find 'Negative Prompt Weight' in the list > Click Install + +Or manually clone this repo into your extensions folder: + +`git clone "https://github.com/muerrilla/stable-diffusion-NPW" extensions/stable-diffusion-NPW` + +## Usage + + + +After installing, you can find the new parameter "Negative Prompt Weight" in the extentions area of txt2img and img2img tabs. + +## More Comparisons and Stuff + +Here are some comparisons between NPW and Attention/Emphasis. So, top row is using NPW and bottom row is using the (Negative Prompt: weight) syntax with the same weights. + +```Prompts: a close up portrait of a cyberpunk [knight|lobster], [lobster| ] armour, cyberpunk!, fantasy, elegant, digital painting, artstation, concept art, matte, sharp focus, art by josan gonzalez``` + +```Params: Steps: 30, Sampler: DPM++ 2M Karras, CFG scale: 10, Seed: 6, Size: 512x640, Model: deliberate_v2``` + + + +*Negative Prompt: red* + + + + +*Negative Prompt: samurai pink cg* + + + + +*Negative Prompt: *custom TI embedding** + +## How It's Done + +At runtime a new learned conditioning tensor `empty_uncond` is made from an empty prompt. Then at every step, inside the denoiser callback, the scheduled `uncond` tensor of the denoiser (which is based on whatever prompt hijinks were passed to the parser) is lerped with the `empty_uncond` to weaken it's effect. The lerp function can instead be given a parameter bigger than 1, and it will boost the effect of the negative prompt like the CFG scale does for the positive. diff --git a/extensions/CHECK/stable-diffusion-NPW/assets/example1.jpg b/extensions/CHECK/stable-diffusion-NPW/assets/example1.jpg new file mode 100644 index 0000000000000000000000000000000000000000..05021c7f0c702560a901d55c77c88773f404939e Binary files /dev/null and b/extensions/CHECK/stable-diffusion-NPW/assets/example1.jpg differ diff --git a/extensions/CHECK/stable-diffusion-NPW/assets/example2.jpg b/extensions/CHECK/stable-diffusion-NPW/assets/example2.jpg new file mode 100644 index 0000000000000000000000000000000000000000..78e6272a70d76754dd3a5a37d37e35dcffb0d53e Binary files /dev/null and b/extensions/CHECK/stable-diffusion-NPW/assets/example2.jpg differ diff --git a/extensions/CHECK/stable-diffusion-NPW/assets/screenshot.png b/extensions/CHECK/stable-diffusion-NPW/assets/screenshot.png new file mode 100644 index 0000000000000000000000000000000000000000..85f10558030299d588b38905ceceb213d1f9784a Binary files /dev/null and b/extensions/CHECK/stable-diffusion-NPW/assets/screenshot.png differ diff --git a/extensions/CHECK/stable-diffusion-NPW/javascript/setup.js b/extensions/CHECK/stable-diffusion-NPW/javascript/setup.js new file mode 100644 index 0000000000000000000000000000000000000000..89d43c409a922d8df276ecb9e42b951a4fc17030 --- /dev/null +++ b/extensions/CHECK/stable-diffusion-NPW/javascript/setup.js @@ -0,0 +1,26 @@ +function setupNPW() { + fixAccordion('tab_txt2img'); + fixAccordion('tab_img2img'); + fixInputs('tab_txt2img'); + fixInputs('tab_img2img'); +} + +function fixInputs(tab) { + const npwSlider = document.querySelector(`#${tab} #npw-slider`); + + npwSlider.querySelector('.head').remove(); + + const newSpan = document.createElement("span"); + newSpan.innerHTML = "Negative Prompt Weight"; + const ancestor = npwSlider.parentNode.parentNode.parentNode; + ancestor.insertBefore(newSpan, ancestor.firstChild); + + document.querySelector(`#${tab} #npw-number input[type="number"]`).setAttribute("step", "0.01"); +} + +function fixAccordion(tab) { + document.querySelector(`#${tab} #npw .icon`).remove(); + document.querySelector(`#${tab} #npw .open`).remove(); +} + +onUiLoaded(setupNPW); diff --git a/extensions/CHECK/stable-diffusion-NPW/scripts/npw.py b/extensions/CHECK/stable-diffusion-NPW/scripts/npw.py new file mode 100644 index 0000000000000000000000000000000000000000..67066c2dd435250231001226e0af8772af7a0fd3 --- /dev/null +++ b/extensions/CHECK/stable-diffusion-NPW/scripts/npw.py @@ -0,0 +1,147 @@ +import os +import torch +import gradio as gr + +import modules.scripts as scripts +import modules.shared as shared +from modules.script_callbacks import on_cfg_denoiser, remove_current_script_callbacks +from modules.prompt_parser import SdConditioning + + +class Script(scripts.Script): + + def title(self): + return "Negative Prompt Weight Extention" + + def show(self, is_img2img): + return scripts.AlwaysVisible + + def ui(self, is_img2img): + with gr.Accordion("Negative Prompt Weight", open=True, elem_id="npw"): + with gr.Row(equal_height=True): + with gr.Column(scale=100): + weight_input_slider = gr.Slider(minimum=0.00, maximum=2.00, step=.05, value=1.00, label="Weight", interactive=True, elem_id="npw-slider") + with gr.Column(scale=1, min_width=120): + with gr.Row(): + weight_input = gr.Number(value=1.00, precision=4, label="Negative Prompt Weight", show_label=False, elem_id="npw-number") + reset_but = gr.Button(value='✕', elem_id='npw-x', size='sm') + + js = """(v) => { + ['#tab_txt2img #npw-x', '#tab_img2img #npw-x'].forEach((selector, index) => { + const element = document.querySelector(selector); + if (document.querySelector(`#tab_${index ? 'img2img' : 'txt2img'}`).style.display === 'block') { + element.style.cssText += `outline:4px solid rgba(255,186,0,${Math.sqrt(Math.abs(v-1))}); border-radius: 0.4em !important;`; + } + }); + return v; + }""" + + weight_input.change(None, [weight_input], weight_input_slider, _js=js) + weight_input_slider.change(None, weight_input_slider, weight_input, _js="(x) => x") + reset_but.click(None, [], [weight_input,weight_input_slider], _js="(x) => [1,1]") + + + self.infotext_fields = [] + self.infotext_fields.extend([ + (weight_input, "NPW_weight"), + ]) + self.paste_field_names = [] + for _, field_name in self.infotext_fields: + self.paste_field_names.append(field_name) + + return [weight_input] + + + def process(self, p, weight): + + weight = getattr(p, 'NPW_weight', weight) + if weight != 1 : self.print_warning(weight) + self.width = p.width + self.height = p.height + self.weight = weight + self.empty_uncond = None + + + if hasattr(self, 'callbacks_added'): + remove_current_script_callbacks() + delattr(self, 'callbacks_added') + # print('NPW callback removed') + + if self.weight != 1.0: + self.empty_uncond = self.make_empty_uncond(self.width, self.height) + on_cfg_denoiser(self.denoiser_callback) + # print('NPW callback added') + self.callbacks_added = True + + p.extra_generation_params.update({ + "NPW_weight": self.weight, + }) + + return + + def postprocess(self, p, processed, *args): + if hasattr(self, 'callbacks_added'): + remove_current_script_callbacks() + delattr(self, 'callbacks_added') + # print('NPW callback removed in post') + + def denoiser_callback(self, params): + def concat_and_lerp(empty, tensor, weight): + if empty.shape[0] != tensor.shape[0]: + empty = empty.expand(tensor.shape[0], *empty.shape[1:]) + if tensor.shape[1] > empty.shape[1]: + num_concatenations = tensor.shape[1] // empty.shape[1] + empty_concat = torch.cat([empty] * num_concatenations, dim=1) + if tensor.shape[1] == empty_concat.shape[1] + 1: + # assuming it's controlnet's marks(?) + empty_concat = torch.cat([tensor[:, :1, :], empty_concat], dim=1) + new_tensor = torch.lerp(empty_concat, tensor, weight) + else: + new_tensor = torch.lerp(empty, tensor, weight) + return new_tensor + + uncond = params.text_uncond + is_dict = isinstance(uncond, dict) + if type(self.empty_uncond) != type(uncond): + self.empty_uncond = self.make_empty_uncond(self.width, self.height) + empty_uncond = self.empty_uncond + + if is_dict: + uncond, cross = uncond['vector'], uncond['crossattn'] + empty_uncond, empty_cross = empty_uncond['vector'], empty_uncond['crossattn'] + params.text_uncond['vector'] = concat_and_lerp(empty_uncond, uncond, self.weight) + params.text_uncond['crossattn'] = concat_and_lerp(empty_cross, cross, self.weight) + else: + params.text_uncond = concat_and_lerp(empty_uncond, uncond, self.weight) + + def make_empty_uncond(self, w, h): + prompt = SdConditioning([""], is_negative_prompt=True, width=w, height=h) + empty_uncond = shared.sd_model.get_learned_conditioning(prompt) + return empty_uncond + + def print_warning(self, value): + if value == 1: + return + color_code = '\033[33m' + if value < 0.5 or value > 1.5: + color_code = '\033[93m' + print(f"\n{color_code}ATTENTION: Negative prompt weight is set to {value}\033[0m") + + +def xyz_support(): + for scriptDataTuple in scripts.scripts_data: + if os.path.basename(scriptDataTuple.path) == 'xyz_grid.py': + xy_grid = scriptDataTuple.module + + npw_weight = xy_grid.AxisOption( + '[NPW] Weight', + float, + xy_grid.apply_field('NPW_weight') + ) + xy_grid.axis_options.extend([ + npw_weight + ]) +try: + xyz_support() +except Exception as e: + print(f'Error trying to add XYZ plot options for NPW', e) diff --git a/extensions/CHECK/stable-diffusion-NPW/style.css b/extensions/CHECK/stable-diffusion-NPW/style.css new file mode 100644 index 0000000000000000000000000000000000000000..0d35932a6d6c3c199160f7e7c90e845f0d6a0d69 --- /dev/null +++ b/extensions/CHECK/stable-diffusion-NPW/style.css @@ -0,0 +1,35 @@ +#npw span { + margin-bottom: 0 !important; + font-size: var(--section-header-text-size); + min-width: fit-content; +} + +#npw input[type=number] { + padding: 4px 12px !important; +} + +#npw button { + min-width: 30px; + max-width: 30px; + min-height: fit-content; + font-weight: var(--button-large-text-weight); + border-radius: 0.5em; + border-width: 1px; +} + +#npw .gradio-row { + align-items: center; + gap: 0.5em; +} + +#npw .gradio-checkbox { + margin: 0; +} + +#npw .form { + min-width: unset !important; +} + +#npw-slider { + padding: 0 10px !important; +} diff --git a/extensions/DriftCorrection/LICENSE b/extensions/DriftCorrection/LICENSE new file mode 100644 index 0000000000000000000000000000000000000000..fdddb29aa445bf3d6a5d843d6dd77e10a9f99657 --- /dev/null +++ b/extensions/DriftCorrection/LICENSE @@ -0,0 +1,24 @@ +This is free and unencumbered software released into the public domain. + +Anyone is free to copy, modify, publish, use, compile, sell, or +distribute this software, either in source code form or as a compiled +binary, for any purpose, commercial or non-commercial, and by any +means. + +In jurisdictions that recognize copyright laws, the author or authors +of this software dedicate any and all copyright interest in the +software to the public domain. We make this dedication for the benefit +of the public at large and to the detriment of our heirs and +successors. We intend this dedication to be an overt act of +relinquishment in perpetuity of all present and future rights to this +software under copyright law. + +THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, +EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF +MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. +IN NO EVENT SHALL THE AUTHORS BE LIABLE FOR ANY CLAIM, DAMAGES OR +OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, +ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR +OTHER DEALINGS IN THE SOFTWARE. + +For more information, please refer to
+ +# 📄 Description + +Tag Autocomplete is an extension for the popular [AUTOMATIC1111 web UI](https://github.com/AUTOMATIC1111/stable-diffusion-webui) for Stable Diffusion. +You can install it using the inbuilt available extensions list, clone the files manually as described [below](#-installation), or use a pre-packaged version from [Releases](https://github.com/DominikDoom/a1111-sd-webui-tagcomplete/releases). + +It displays autocompletion hints for recognized tags from "image booru" boards such as Danbooru, which are primarily used for browsing Anime-style illustrations. +Since most custom Stable Diffusion models were trained using this information or merged with ones that did, using exact tags in prompts can often improve composition and consistency, even if the model itself has a photorealistic style. + +Disclaimer: The default tag lists contain NSFW terms, please use them responsibly. + +
+ +# ✨ Features +- 🚀 Instant completion hints while typing (under normal circumstances) +- ⌨️ Keyboard navigation +- 🌒 Dark & Light mode support +- 🛠️ Many [settings](#%EF%B8%8F-settings) and customizability +- 🌍 [Translation support](#translations) for tags, with optional live preview for the full prompt + - **Note:** Translation files are provided by the community, see [here](#list-of-translations) for a list of translations I know of. + +Tag autocomplete supports built-in completion for: +- 🏷️ **Danbooru & e621 tags** (Top 100k by post count, as of November 2022) +- ✳️ [**Wildcards**](#wildcards) +- ➕ [**Extra network**](#extra-networks-embeddings-hypernets-lora-) filenames, including + - Textual Inversion embeddings [(jump to readme section)] + - Hypernetworks + - LoRA + - LyCORIS / LoHA +- 🪄 [**Chants**](#chants) (custom format for longer prompt presets) +- 🏷️ "[**Extra file**](#extra-file)", one set of customizable extra tags + + +Additionally, some support for other third party extensions exists: +
Click to expand
+ +- [Image Browser][image-browser-url] - Filename & EXIF keyword search +- [Multidiffusion Upscaler][multidiffusion-url] - Regional Prompts +- [Dataset Tag Editor][tag-editor-url] - Caption, Interrogate Result, Edit Tags & Edit Caption +- [WD 1.4 Tagger][wd-tagger-url] - Additional & Excluded tags +- [Umi AI][umi-url] - Completion for YAML wildcards ++ +# 🖼️ Screenshots & Demo videos +
Click to expand
+Basic usage (with keyboard navigation): + +https://user-images.githubusercontent.com/34448969/200128020-10d9a8b2-cea6-4e3f-bcd2-8c40c8c73233.mp4 + +Wildcard script support: + +https://user-images.githubusercontent.com/34448969/200128031-22dd7c33-71d1-464f-ae36-5f6c8fd49df0.mp4 + +Extra Network preview support: + +https://github.com/DominikDoom/a1111-sd-webui-tagcomplete/assets/34448969/3c0cad84-fb5f-436d-b05a-28db35860d13 + +Dark and Light mode supported, including tag colors: + + + ++ +# 📦 Installation +## Using the built-in extension list +1. Open the `Extensions` tab +2. Open the `Available` sub-tab +3. Click **Load from** +4. Find **Booru tag autocompletion** in the list + - The extension was one of the first available, so selecting "oldest first" will show it high up in the list. + - Alternatively, use CRTL + F to search for the text on the page +5. Click **Install** on the right side + + + +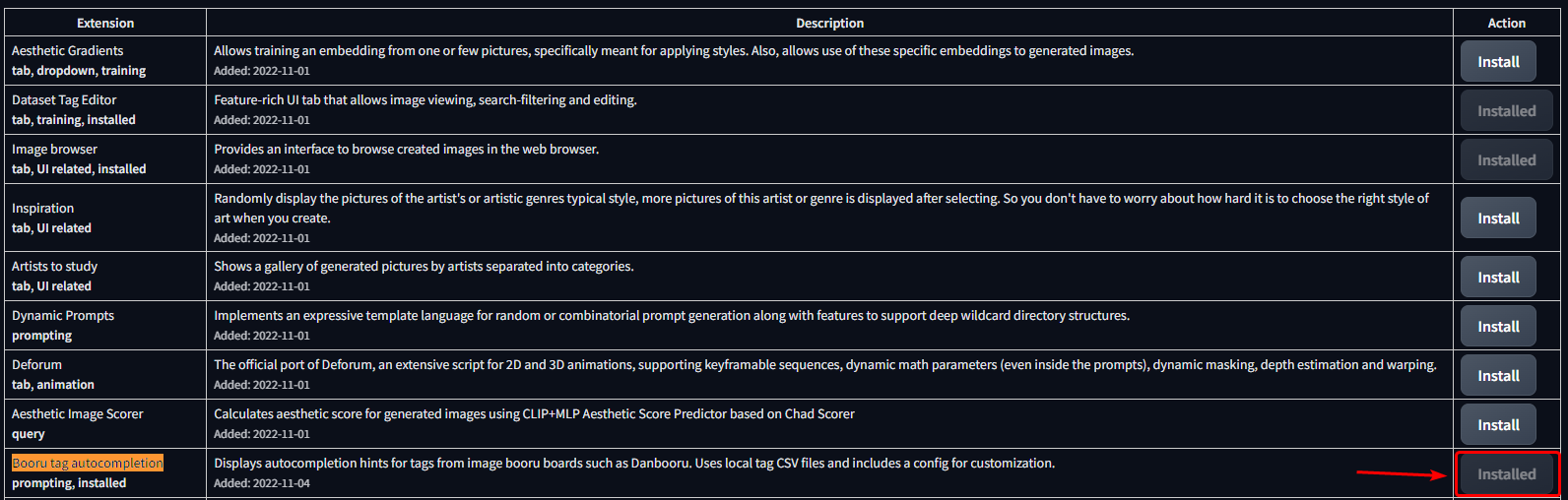 + + +## Manual clone +```bash +git clone "https://github.com/DominikDoom/a1111-sd-webui-tagcomplete.git" extensions/tag-autocomplete +``` +(The second argument specifies the name of the folder, you can choose whatever you like). + +
+ +# ❇️ Additional completion support +## Wildcards +Autocompletion also works with wildcard files used by https://github.com/AUTOMATIC1111/stable-diffusion-webui-wildcards or other similar scripts/extensions. +Completion is triggered by typing `__` (double underscore). It will first show a list of your wildcard files, and upon choosing one, the replacement options inside that file. +This enables you to either insert categories to be replaced by the script, or directly choose one and use wildcards as a sort of categorized custom tag system. + + + + + +Wildcards are searched for in every extension folder, as well as the `scripts/wildcards` folder to support legacy versions. This means that you can combine wildcards from multiple extensions. Nested folders are also supported if you have grouped your wildcards in that way. + +## Extra networks (Embeddings, Hypernets, LoRA, ...) +Completion for these types is triggered by typing `<`. By default it will show them all mixed together, but further filtering can be done in the following way: +- `
Image example
+ +  ++ +The file can then be selected using the "Chant file" settings dropdown if it is located inside the extension's `tags` folder. + +A chant object has four fields: +- `name` - Display name +- `terms` - Search terms +- `content` - The actual prompt content +- `color` - Color, using the same category color system as normal tags + +## Umi AI tags +https://github.com/Klokinator/Umi-AI is a feature-rich wildcard extension similar to Unprompted or Dynamic Wildcards. +In recent releases, it uses YAML-based wildcard tags to enable a complex chaining system,for example `<[preset][--female][sfw][species]>` will choose the preset category, exclude female related tags, further narrow it down with the following categories, and then choose one random fill-in matching all these criteria at runtime. Completion is triggered by `<[` and then each following new unclosed bracket, e.g. `<[xyz][`, until closed by `>`. + +Tag Autocomplete can recommend these options in a smart way, meaning while you continue to add category tags, it will only show results still matching what comes before. +It also shows how many fill-in tags are available to choose from for that combo in place of the tag post count, enabling a quick overview and filtering of the large initial set. + +Most of the credit goes to [@ctwrs](https://github.com/ctwrs) here, they contributed a lot as one of the Umi developers. + +# 🛠️ Settings + +The extension has a large amount of configuration & customizability built in. Most should be self-explanatory, but for a detailed description click on a section below. + + +
Tag filename
+ +The main tag file the script uses. Included by default are `danbooru.csv` and `e621.csv`. While you can add custom tags here, the vast majority of models are not trained on anything other than these two (mostly danbooru), so it will not have much benefit. + +You can also set it to `None` if you want to use other functionality of the extension (e.g. Wildcard or LoRA completion), but aren't interested in the normal tags. + + +"Active in" settings
+ +Specifies where tag autocomplete should attach itself to and listen for changes. +Negative prompts follow the settings for txt2img & img2img, so they will only be active if their "parent" is active. + + +Black / Whitelist
+ +While the above options can turn off tag autocomplete globally, sometimes you might want to enable or disable it only for specific models. For example, if most of your models are Anime ones, you could add your photorealistic models, that weren't trained on booru tags and don't benefit from it, to the blacklist, which will automatically disable it after you switch to these models. You can use both the model name (including file extension) and their webui hashes (both short and long form). + +`Blacklist` will exclude all specified models, while `Whitelist` will only activate it for these and stay off by default. One exception is an empty whitelist, which will be ignored (making it the same as an empty blacklist). + + +Move completion popup with cursor
+ +This option enables or disables the floating popup to follow the position of your cursor, like it would do in an IDE. The script tries to reserve enough room for the popup to prevent squishing on the right side, but that doesn't always work for longer tags. If disabled, the popup will stay on the left. + + + + + +Result count
+ +Settings for the amount of results to show at once. +If `Show all results` is active, it will show a scrollable list instead of cutting it off after the number specified in `Maximum results`. For performance reasons, in that case not all are loaded at once, but instead in blocks. The block size is dictated by `How many results to load at once`. Once you reach the bottom, the next block will load (but that should rarely happen). + +Notably, `Maximum results` will still have an influence if `Show all results` is used, since it dictates the height of the popup before scrolling begins. + + +Completion delay
+ +Depending on the configuration, real time tag completion can get computationally expensive. +This option sets a "debounce" delay in milliseconds (1000ms = 1s), during which no second completion will get queried. This might especially be useful if you type very fast. + + +"Search for" settings
+ +Pretty self explanatory, enables or disables certain completion types. + +Umi AI wildcards are included in the normal wildcard option here, although they use a different format, since their usage intention is similar. + + +"?" Wiki links
+ +If this option is turned on, it will show a `?` link next to the tag. Clicking this will try to open the wiki page for that tag on danbooru or e621, depending on which tag file you use. + +> ⚠️ Warning: +> +> Danbooru and e621 are external sites and include a lot of NSFW content, which might show in the list of examples for a tag on its wiki page. Because of this, the option is disabled by default. + + +Extra network live previews
+ +This option enables a small preview window alongside the normal completion popup that will show the card preview also usd in the extra networks tab for that file. + + +Completion settings
+ +These settings specify how the text will be inserted. + +Booru sites mostly use underscores in tags instead of spaces, but during preprocessing most models replaced this back with spaces since the CLIP encoder used in Stable diffusion was trained on natural language. Thus, by default tag autocomplete will as well. + +Parentheses are used as control characters in the webui to give more attention / weight to a specific part of the prompt, so tags including parentheses are escaped (`\( \)`) by default to not influence that. + +Depending on the last setting, tag autocomplete will append a comma and space after inserting a tag, which may help for rapid completion of multiple tags in a row. + + +Lora / Lyco trigger word insertion
+ +See [the detailed readme section](#lora--lyco-trigger-word-completion) for more info. + +Selects the mode to use for Lora / Lyco trigger word insertion. +Needs the [model-keyword](https://github.com/mix1009/model-keyword/) extension to be installed, else it will do nothing. + +- Never + - Will not complete trigger words, even if the model-keyword extension is installed +- Only user list + - Will only load the custom keywords specified in the lora-keyword-user.txt file and ignore the default list +- Always + - Will load and use both lists + +Switching from "Never" to what you had before or back will not require a restart, but changing between the full and user only list will. + + +Wildcard path completion
+ +Some collections of wildcards are organized in nested subfolders. +They are listed with the full path to the file, like "hair/colors/light/..." or "clothing/male/casual/..." etc. + +In these cases it is often hard to type the full path manually, but you still want to narrow the selection before further scrolling in the list. +For this, a partial completion of the path can be triggered with Tab (or the custom hotkey for `ChooseSelectedOrFirst`) if the results to choose from are all paths. + +This setting determines the mode it should use for completion: +- To next folder level: + - Completes until the next `/` in the path, preferring your selection as the way forward + - If you want to directly choose an option, Enter / the `ChooseSelected` hotkey will skip it and fully complete. +- To first difference: + - Completes until the first difference in the results and waits for additional info + - E.g. if you have "/sub/folder_a/..." and "/sub/folder_b/...", completing after typing "su" will insert everything up to "/sub/folder_" and stop there until you type a or b to clarify. + - If you selected something with the arrow keys (regardless of pressing Enter or Tab), it will skip it and fully complete. +- Always fully: + - As the name suggests, disables the partial completion behavior and inserts the full path under all circumstances like with normal tags. + + +Alias settings
+ +Tags often are referred to with multiple aliases. If `Search by alias` is turned on, those will be included in the search results, which might help if you are unsure of the correct tag. They will still get replaced by the actual tag they are linked to on insertion, since that is what the models were trained on. + +`Only show alias` sets if you want to see only the alias or also the tag it maps to +(shown as `Translation settings
+ +Tag Autocomplete has support for tag translations specified in a separate file (`Translation filename`). You can search for tags using those translations, meaning that if you don't know the English tagword and have a translation file in your native language, you can use that instead. + +It also has a legacy format option for some old files used in the community, as well as an experimental live translation preview for the whole prompt so you can easily find and edit tags afterwards. + +For more details, see the [section on translations](#translations) below. + + +Extra file settings
+ +Specifies a set of extra tags that get appended either before or after the regular results, as specified here. Mostly useful for small custom tag sets such as the commonly used quality tags (masterpiece, best quality, etc.) + +If you want completion for longer presets or even whole prompts, have a look at [Chants](#chants) instead. + + +Chant filename
+ +Chants are longer presets or even whole prompts that can be selected & inserted at once, similar to the built in styles dropdown of the webui. They do offer some additional features though, and are faster to use. + +For more info, see the section on [Chants](#chants) above. + + +Hotkeys
+ +You can specify the hotkeys for most keyboard navigation features here. +Should be one of the key names specified in https://www.w3.org/TR/uievents-key/#named-key-attribute-value. + +Function explanation: +- Move Up / Down: Select the next tag +- Jump Up / Down: Move by five places at once +- Jump to Start / End: Jump to the top or bottom of the list +- ChooseSelected: Select the highlighted tag, or close popup if nothing was selected +- ChooseSelectedOrFirst: Same as above, but default to the first result if nothing was selected +- Close: Closes the popup + + +Colors
+ +Here, you can change the default colors used for different tag categories. They were chosen to be similar to the category colors of their source site. + +The format is standard JSON +- The object names correspond to the tag filename they should be used for. +- The numbers are specifying the tag type, which is dependent on the tag source. For more info, see [CSV tag data](#csv-tag-data). +- The first value in the square brackets is for dark, the second for light mode. HTML color names and hex codes should both work. + +This can also be used to add new color sets for custom tag files. + + +Refresh TAC temp files
+ +This is a "fake" setting, meaning it doesn't actually configure anything. Rather, it is a small hack to abuse the refresh button developers can add to webui options. Clicking on the refresh button next to this setting will force tag autocomplete to recreate and reload some temporary internal files, which normally only happens on restarting the UI. + +Tag autocomplete depends on these files for various functionality, especially related to extra networks and wildcard completion. This setting can be used to rebuild the lists if you have, for example, added a few new LoRAs into the folder and don't want to restart the UI to get tag autocomplete to list them. + +You can also add this to your quicksettings bar to have the refresh button available at all times. + + ++ +# Translations +An additional file can be added in the translation section, which will be used to translate both tags and aliases and also enables searching by translation. +This file needs to be a CSV in the format `
+ +# 📄 説明 + +Tag AutocompleteはStable Diffusion向けの人気のweb UIである、[AUTOMATIC1111 web UI](https://github.com/AUTOMATIC1111/stable-diffusion-webui)の拡張機能として利用できます。 + +主にアニメ系イラストを閲覧するための掲示板「Danbooru」などで利用されているタグの自動補完ヒントを表示するための拡張機能となります。 +例えば[Waifu Diffusion](https://github.com/harubaru/waifu-diffusion)やNAIから派生した多くのモデルやマージなど、Stable Diffusionモデルの中にはこの情報を使って学習されたものもあるため、プロンプトに正確なタグを使用することで、多くのケースで構図を改善した思い通りの画像が生成できるようになります。 + +組み込みの利用可能な拡張機能リストを使ってインストールしたり、[下記](#-インストール)の説明に従って手動でファイルをcloneしたり、[Releases](https://github.com/DominikDoom/a1111-sd-webui-tagcomplete/releases)にあるパッケージ済みのバージョンを使うことができます。 + +
+ +# ✨ Features +- 🚀 タイピング中に補完のためのヒントを表示 (通常時) +- ⌨️ キーボードナビゲーション +- 🌒 ダーク&ライトモードのサポート +- 🛠️ 多くの[設定](#%EF%B8%8F-設定)とカスタマイズ性を提供 +- 🌍 [翻訳サポート](#翻訳)タグ、オプションでプロンプトのライブ プレビュー付き + - 私が知っている翻訳のリストは[こちら](#翻訳リスト)を参照してください。 + +タグの自動補完は組み込まれている補完内容をサポートしています: +- 🏷️ **Danbooru & e621 tags** (投稿数上位100k、2022年11月現在) +- ✳️ [**ワイルドカード**](#ワイルドカード) +- ➕ [**Extra networks**](#extra-networks-embeddings-hypernets-lora-) filenames, including + - Textual Inversion embeddings + - Hypernetworks + - LoRA + - LyCORIS / LoHA +- 🪄 [**Chants(詠唱)**](#chants詠唱) (長いプロンプトプリセット用のカスタムフォーマット) +- 🏷️ "[**Extra file**](#extra-file)", カスタマイズ可能なextra tagsセット + + +さらに、サードパーティの拡張機能にも対応しています: +
クリックして開く
+ +- [Image Browser][image-browser-url] - ファイル名とEXIFキーワードによる検索 +- [Multidiffusion Upscaler][multidiffusion-url] - 地域別のプロンプト +- [Dataset Tag Editor][tag-editor-url] - キャプション, 結果の確認, タグの編集 & キャプションの編集 +- [WD 1.4 Tagger][wd-tagger-url] - 追加と除外タグ +- [Umi AI][umi-url] - YAMLワイルドカードの補完 ++ +## スクリーンショット & デモ動画 +
クリックすると開きます
+基本的な使い方 (キーボード操作を用いたもの): + +https://user-images.githubusercontent.com/34448969/200128020-10d9a8b2-cea6-4e3f-bcd2-8c40c8c73233.mp4 + +ワイルドカードをサポート: + +https://user-images.githubusercontent.com/34448969/200128031-22dd7c33-71d1-464f-ae36-5f6c8fd49df0.mp4 + +タグカラーを含むDarkモードとLightモードに対応: + + + ++ +このファイルが拡張機能の `tags` フォルダ内にある場合、settings内の"Chant file"ドロップダウンから選択することができます。 + +chantオブジェクトは4つのフィールドを持ちます: +- `name` - 表示される名称 +- `terms` - 検索キーワード +- `content` - 実際に挿入されるプロンプト +- `color` - 表示される色。通常のタグと同じカテゴリーカラーシステムを使用しています。 + +## Umi AI tags +https://github.com/Klokinator/Umi-AI は、Unprompted や Dynamic Wildcards に似た、機能豊富なワイルドカード拡張です。 +例えば `<[preset][--female][sfw][species]>` はプリセットカテゴリーを選び、女性関連のタグを除外し、さらに次のカテゴリーで絞り込み、実行時にこれらすべての条件に一致するランダムなフィルインを1つ選び出します。補完は `<[`] とそれに続く新しい開く括弧、例えば `<[xyz][`] で始まり、 `>` で閉じるまで続きます。 + +タグの自動補完は、これらのオプションをスマートに提案していきます。つまり、カテゴリータグの追加を続けても、その前に来たものと一致する結果だけが表示されるのです。 +また、タグの投稿数の代わりに、そのコンボから選択可能なフィルインタグの数を表示し、大規模になる初期内容に対して迅速な概要とフィルタリングを可能にします。 + +ほとんどの功績は[@ctwrs](https://github.com/ctwrs)によるものです。この方はUmiの開発者の一人として多くの貢献をしています。 + +# 🛠️ 設定 + +この拡張機能には多くの設定とカスタマイズ機能が組み込まれています。ほとんどのことははっきりしていますが、詳細な説明は以下のセクションをクリックしてください。 + + +
Tag filename
+ +スクリプトが使用するメインのタグファイルとなります。デフォルトでは `danbooru.csv` と `e621.csv` が含まれており、ここにカスタムタグを追加することもできますが、大半のモデルはこの2つ以外(主にdanbooru)では学習していないため、あまり意味はありません。 + +拡張機能の他の機能(ワイルドカードやLoRA補完など)を使いたいが、通常のタグには興味がない場合は、`None`に設定することも可能です。 + + +"Active in" の設定
+ +タグのオートコンプリートがどこにアタッチされ、変更を受け付けるかを指定します。 +ネガティブプロンプトはtxt2imgとimg2imgの設定に従うので、"親 "がアクティブな場合にのみアクティブとなります。 + + +Black / Whitelist
+ +このオプションは、タグのオートコンプリートをグローバルにオフにすることができますが、特定のモデルに対してのみ有効または無効にしたい場合もあります。 +例えば、あなたのモデルのほとんどがアニメモデルである場合、boorタグでトレーニングされておらず、その恩恵を受けないフォトリアリスティックモデルをブラックリストに追加し、これらのモデルに切り替えた後に自動的に無効にすることができます。モデル名(拡張子を含む)とwebuiハッシュ(短い形式と長い形式の両方)の両方を使用できます。 + +`Blacklist`は指定したすべてのモデルを除外しますが、`Whitelist`はこれらのモデルに対してのみ有効で、デフォルトではオフのままです。例外として、空のホワイトリストは無視されます(空のブラックリストと同じです)。 + + +カーソルで補完ポップアップを移動
+ +このオプションは、IDEで行われるような、カーソルの位置に追従するフローティングポップアップを有効または無効にします。スクリプトはポップアップが右側でつぶれないように十分なスペースを確保しようとしますが、長いタグでは必ずしもうまくいきません。無効にした場合、ポップアップは左側に表示されます。 + + + + + +結果の数
+ +一度に表示する結果の量を設定できます。 +`Show all results`が有効な場合、`Maximum results`で指定された数で切り捨てられるのではなく、スクロール可能なリストが表示されます。パフォーマンス上の理由から、この場合はすべてを一度に読み込むのではなく、ブロック単位で読み込みます。ブロックの大きさは`How many results to load at once`によって決まります。一番下に到達すると、次のブロックがロードされます(しかし、そんなことはめったには起こらないと思います)。 + +特筆すべきこととして、`Show all results` が使用される場合でも、`Maximum results` は影響を及ぼします。これは、スクロールが開始される前のポップアップの高さを制限するからです。 + + +補完の遅れについて
+ +設定によっては、リアルタイムのタグ補完は計算量が多くなることがあります。 +このオプションは debounce による遅延をミリ秒単位で設定します(1000ミリ秒 = 1秒)。このオプションは、入力が非常に速い場合に特に有効です。 + + +"Search for" に関する設定
+ +特定の補完タイプを有効または無効にします。 + +Umi AIワイルドカードは、使用目的が似ているため、異なるフォーマットを使用しますが、ここでは通常のワイルドカードオプションに含まれます。 + + +"?" Wiki links
+ +このオプションがオンになっている場合、タグの横に `?` リンクが表示されます。これをクリックすると、danbooruまたはe621のそのタグのWikiページを開こうとします。 + +> ⚠️ 警告: +> +> Danbooruとe621は外部サイトであり、多くのNSFWコンテンツを含んでいます。このため、このオプションはデフォルトで無効になっています。 + + +補完設定
+ +これらの設定で、テキストの挿入方法を指定できます。 + +Booruのサイトでは、タグにスペースの代わりにアンダースコアを使用することがほとんどですが、Stable diffusionで使用されているCLIPエンコーダーは自然言語でトレーニングされているため、前処理中にほとんどのモデルがこのアンダースコアをスペースに置き換えました。したがって、デフォルトではタグのオートコンプリートも同じようになります。 + +括弧は、プロンプトの特定の部分をより注目/重視するために、Webuiの制御文字として使用されるため、デフォルトでは括弧を含むタグはエスケープされます (`\( \)`) 。 + +最後の設定によりますが、タグのオートコンプリートはタグを挿入した後にカンマとスペースを追加します。 + + +ワイルドカードのパス補完
+ +ワイルドカードのいくつかのコレクションは、ネストしたサブフォルダに整理されています。 +それらは、"hair/colors/light/... " や "clothing/male/casual/... " などのように、ファイルへのフルパスとともにリストアップされています。 + +このような場合、手動でフルパスを入力するのは難しいことが多いのですが、それでもリストをさらにスクロールする前に選択範囲を狭めたいものです。 +この場合、選択する結果がすべてのパスであれば、Tab(または`ChooseSelectedOrFirst`のカスタムホットキー)でパスの部分補完をトリガーすることが可能です。 + +この設定は、補完に使用するモードを決定します: +- 次のフォルダレベルまで: + - パス内の次の/まで補完し、選択したものを進む方向として優先します + - オプションを直接選択したい場合は、Enter キーまたは `ChooseSelected` ホットキーを使用してスキップし、完全に補完します。 +- 最初の差分まで: + - 結果内の最初の違いまで補完し、追加の情報を待ちます + - 例:"/sub/folder_a/..." と "/sub/folder_b/..." がある場合、"su" と入力した後に補完すると、"/sub/folder_" まですべてを挿入し、a または b を入力して明確にするまでそこで停止します。 + - 矢印キーで何かを選択した場合(EnterキーやTabキーを押すかどうかに関係なく)、それをスキップして完全に補完します。 +- 常に全て: + - 名前が示すように、部分的な補完動作を無効にし、通常のタグのようにすべての状況下で完全なパスを挿入します。 + + +Alias 設定
+ +タグはしばしば複数の別名(Alias)で参照されます。`Search by alias`がオンになっている場合、それらは検索結果に含まれ、正しいタグがわからない場合に役立ちます。この場合でも、挿入時にリンクされている実際のタグに置き換えられます。 + +`Only show alias` セットは、エイリアスのみを表示したい場合、またはそのエイリアスがマップするタグも表示したい場合に使用します。 +(`翻訳設定
+ +Tag Autocompleteは、別のファイル(`Translation filename`)で指定されたタグの翻訳をサポートしています。つまり、英語のタグ名が分からなくても、自身の言語の翻訳ファイルがあれば、それを代わりに使うことができます。 + +また、コミュニティで使用されている古いファイルのためのレガシーフォーマットオプションや、プロンプト全体のライブ翻訳プレビューなど実験的な機能もあります。 + +詳細については、以下の [翻訳に関するセクション](#翻訳) を参照してください。 + + +Extra ファイル設定
+ +ここで指定したように、通常の結果の前後に追加される追加タグのセットを指定します。一般的に使用される品質タグ (`masterpiece, best quality,` など) のような小さなカスタムタグセットに便利です。 + +長いプリセットやプロンプト全体を補完したい場合は、代わりに [Chants(詠唱)](#chants詠唱) を参照してください。 + + +Chant ファイル名
+ +Chantとは、長いプリセット、あるいはプロンプト全体を一度に選択して挿入できるもので、Webuiに内蔵されているスタイルのドロップダウンに似ています。Chantにはいくつかの追加機能があり、より速く使用することができます。 + +詳しくは上記の[Chants(詠唱)](#chants詠唱)のセクションを参照してください。 + + +Hotkeys
+ +ほとんどのキーボードナビゲーション機能のホットキーをここで指定できます。 +https://www.w3.org/TR/uievents-key/#named-key-attribute-value + +機能の説明 +- Move Up / Down:次のタグを選択 +- Jump Up / Down:一度に5箇所移動する。 +- Jump to Start / End: リストの先頭または末尾にジャンプ +- ChooseSelected ハイライトされたタグを選択するか、何も選択されていない場合はポップアップを閉じます。 +- ChooseSelectedOrFirst:上記と同じですが、何も選択されていない場合、デフォルトで最初の結果が選択されます。 +- Close ポップアップを閉じる + + +Colors
+ +ここでは、異なるタグカテゴリーに使用されるデフォルトの色を変更することができます。これらは、ソースサイトのカテゴリの色に似ているように選択されています。 + +フォーマットは標準的なJSON +- オブジェクト名は、タグのファイル名に対応しています。 +- 数字はタグの種類を表し、タグのソースに依存します。詳細については、[CSV tag data](#csv-tag-data)を参照してください。 +- 角括弧内の最初の値はダークモード、2番目の値はライトモードです。HTMLの色名と16進数コードのどちらでも使えます。 + +これは、カスタムタグ・ファイルに新しいカラーセットを追加するためにも使用できます。 + + +TACの一時作成ファイルのリフレッシュ
+ +これは "フェイク"設定で、実際には何も設定しません。むしろ、開発者がwebuiのオプションに追加できる更新ボタンを悪用するための小さなハックです。この設定の隣にある更新ボタンをクリックすると、タグオートコンプリートにいくつかの一時的な内部ファイルを再作成・再読み込みさせます。 + +タグオートコンプリートは様々な機能、特に余分なネットワークとワイルドカード補完に関連するこれらのファイルに依存しています。この設定は、例えば新しいLoRAをいくつかフォルダに追加し、タグ・オートコンプリートにリストを表示させるためにUIを再起動したくない場合に、リストを再構築するために使用できます。 + +また、この設定をクイック設定バーに追加することで、いつでも更新ボタンを利用できるようになります。 + + ++ +# 翻訳 +タグとエイリアスの両方を翻訳するために使用することができ、また翻訳による検索を可能にするための、追加のファイルを翻訳セクションに追加することができます。 +このファイルは、`
Take care of VRAM usage!'; + div.appendChild(tip); + + div.addEventListener('mousedown', function (e) { + if (e.button === 0) { onBoxMouseDown(e, is_t2i, idx); } + }); + div.addEventListener('mousemove', function (e) { + updateCursorStyle(e, is_t2i, idx); + }); + + const shower = function() { // insert to DOM if necessary + if (!gradioApp().querySelector('#' + div.id)) { + locator().appendChild(div); + } + } + bboxes[idx] = [div, bbox, shower]; + } + + // Show the bounding box + displayBox(canvas, is_t2i, bboxes[idx]); + return true; + } else { + if (!bboxes[idx]) { return false; } + const [div, bbox, shower] = bboxes[idx]; + div.style.display = 'none'; + } + return false; +} + +function onBoxChange(is_t2i, idx, what, v) { + // This function handles all the changes of the bounding box + // Including the rendering and python slider update + let bboxes = null; + let canvas = null; + if (is_t2i) { + bboxes = t2i_bboxes; + canvas = gradioApp().querySelector('#MD-bbox-ref-t2i img'); + } else { + bboxes = i2i_bboxes; + canvas = gradioApp().querySelector('#MD-bbox-ref-i2i img'); + } + if (!bboxes[idx] || !canvas) { + switch (what) { + case 'x': return DEFAULT_X; + case 'y': return DEFAULT_Y; + case 'w': return DEFAULT_W; + case 'h': return DEFAULT_H; + } + } + const [div, bbox, shower] = bboxes[idx]; + if (div.style.display === 'none') { return v; } + + // parse trigger + switch (what) { + case 'x': bbox[0] = v; break; + case 'y': bbox[1] = v; break; + case 'w': bbox[2] = v; break; + case 'h': bbox[3] = v; break; + } + displayBox(canvas, is_t2i, bboxes[idx]); + return v; +} + +// ↓↓↓ called from js ↓↓↓ + +function getSeedInfo(is_t2i, id, current_seed) { + const info_id = is_t2i ? '#html_info_txt2img' : '#html_info_img2img'; + const info_div = gradioApp().querySelector(info_id); + try{ + current_seed = parseInt(current_seed); + } catch(e) { + current_seed = -1; + } + if (!info_div) return current_seed; + let info = info_div.innerHTML; + if (!info) return current_seed; + // remove all html tags + info = info.replace(/<[^>]*>/g, ''); + // Find a json string 'region control:' in the info + // get its index + idx = info.indexOf('Region control'); + if (idx == -1) return current_seed; + // get the json string (detect the bracket) + // find the first '{' + let start_idx = info.indexOf('{', idx); + let bracket = 1; + let end_idx = start_idx + 1; + while (bracket > 0 && end_idx < info.length) { + if (info[end_idx] == '{') bracket++; + if (info[end_idx] == '}') bracket--; + end_idx++; + } + if (bracket > 0) { + return current_seed; + } + // get the json string + let json_str = info.substring(start_idx, end_idx); + // replace the single quote to double quote + json_str = json_str.replace(/'/g, '"'); + // replace python True to javascript true, False to false + json_str = json_str.replace(/True/g, 'true'); + // parse the json string + let json = JSON.parse(json_str); + // get the seed if the region id is in the json + const region_id = 'Region ' + id.toString(); + if (!(region_id in json)) return current_seed; + const region = json[region_id]; + if (!('seed' in region)) return current_seed; + let seed = region['seed']; + try{ + seed = parseInt(seed); + } catch(e) { + return current_seed; + } + return seed; +} + +function displayBox(canvas, is_t2i, bbox_info) { + // check null input + const [div, bbox, shower] = bbox_info; + const [x, y, w, h] = bbox; + if (!canvas || !div || x == null || y == null || w == null || h == null) { return; } + + // client: canvas widget display size + // natural: content image real size + let vpScale = Math.min(canvas.clientWidth / canvas.naturalWidth, canvas.clientHeight / canvas.naturalHeight); + let canvasCenterX = canvas.clientWidth / 2; + let canvasCenterY = canvas.clientHeight / 2; + let scaledX = canvas.naturalWidth * vpScale; + let scaledY = canvas.naturalHeight * vpScale; + let viewRectLeft = canvasCenterX - scaledX / 2; + let viewRectRight = canvasCenterX + scaledX / 2; + let viewRectTop = canvasCenterY - scaledY / 2; + let viewRectDown = canvasCenterY + scaledY / 2; + + let xDiv = viewRectLeft + scaledX * x; + let yDiv = viewRectTop + scaledY * y; + let wDiv = Math.min(scaledX * w, viewRectRight - xDiv); + let hDiv = Math.min(scaledY * h, viewRectDown - yDiv); + + // Calculate warning bbox size + let upscalerFactor = 1.0; + if (!is_t2i) { + const upscalerInput = parseFloat(gradioApp().querySelector('#MD-i2i-upscaler-factor input').value); + if (!isNaN(upscalerInput)) upscalerFactor = upscalerInput; + } + let maxSize = BBOX_WARNING_SIZE / upscalerFactor * vpScale; + let maxW = maxSize / scaledX; + let maxH = maxSize / scaledY; + if (w > maxW || h > maxH) { + div.querySelector('span').style.display = 'block'; + } else { + div.querySelector('span').style.display = 'none'; + } + + // update
Please test on small images before actual upscale. Default params require denoise <= 0.6
') + with gr.Row(variant='compact'): + noise_inverse_retouch = gr.Slider(minimum=1, maximum=100, step=0.1, label='Retouch', value=1, elem_id=uid('noise-inverse-retouch')) + noise_inverse_renoise_strength = gr.Slider(minimum=0, maximum=2, step=0.01, label='Renoise strength', value=1, elem_id=uid('noise-inverse-renoise-strength')) + noise_inverse_renoise_kernel = gr.Slider(minimum=2, maximum=512, step=1, label='Renoise kernel size', value=64, elem_id=uid('noise-inverse-renoise-kernel')) + + # The control includes txt2img and img2img, we use t2i and i2i to distinguish them + with gr.Group(elem_id=f'MD-bbox-control-{tab}') as tab_bbox: + with gr.Accordion('Region Prompt Control', open=False): + with gr.Row(variant='compact'): + enable_bbox_control = gr.Checkbox(label='Enable Control', value=False, elem_id=uid('enable-bbox-control')) + draw_background = gr.Checkbox(label='Draw full canvas background', value=False, elem_id=uid('draw-background')) + causal_layers = gr.Checkbox(label='Causalize layers', value=False, visible=False, elem_id='MD-causal-layers') # NOTE: currently not used + + with gr.Row(variant='compact'): + create_button = gr.Button(value="Create txt2img canvas" if not is_img2img else "From img2img", elem_id='MD-create-canvas') + + bbox_controls: List[Component] = [] # control set for each bbox + with gr.Row(variant='compact'): + ref_image = gr.Image(label='Ref image (for conviently locate regions)', image_mode=None, elem_id=f'MD-bbox-ref-{tab}', interactive=True) + if not is_img2img: + # gradio has a serious bug: it cannot accept multiple inputs when you use both js and fn. + # to workaround this, we concat the inputs into a single string and parse it in js + def create_t2i_ref(string): + w, h = [int(x) for x in string.split('x')] + w = max(w, opt_f) + h = max(h, opt_f) + return np.zeros(shape=(h, w, 3), dtype=np.uint8) + 255 + create_button.click( + fn=create_t2i_ref, + inputs=overwrite_size, + outputs=ref_image, + _js='onCreateT2IRefClick', + show_progress=False) + else: + create_button.click(fn=None, outputs=ref_image, _js='onCreateI2IRefClick', show_progress=False) + + with gr.Row(variant='compact'): + cfg_name = gr.Textbox(label='Custom Config File', value='config.json', elem_id=uid('cfg-name')) + cfg_dump = gr.Button(value='💾 Save', variant='tool') + cfg_load = gr.Button(value='⚙️ Load', variant='tool') + + with gr.Row(variant='compact'): + cfg_tip = gr.HTML(value='', visible=False) + + for i in range(BBOX_MAX_NUM): + # Only when displaying & png generate info we use index i+1, in other cases we use i + with gr.Accordion(f'Region {i+1}', open=False, elem_id=f'MD-accordion-{tab}-{i}'): + with gr.Row(variant='compact'): + e = gr.Checkbox(label=f'Enable Region {i+1}', value=False, elem_id=f'MD-bbox-{tab}-{i}-enable') + e.change(fn=None, inputs=e, outputs=e, _js=f'e => onBoxEnableClick({is_t2i}, {i}, e)', show_progress=False) + + blend_mode = gr.Dropdown(label='Type', choices=[e.value for e in BlendMode], value=BlendMode.BACKGROUND.value, elem_id=f'MD-{tab}-{i}-blend-mode') + feather_ratio = gr.Slider(label='Feather', value=0.2, minimum=0, maximum=1, step=0.05, visible=False, elem_id=f'MD-{tab}-{i}-feather') + + blend_mode.change(fn=lambda x: gr_show(x==BlendMode.FOREGROUND.value), inputs=blend_mode, outputs=feather_ratio, show_progress=False) + + with gr.Row(variant='compact'): + x = gr.Slider(label='x', value=0.4, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-x') + y = gr.Slider(label='y', value=0.4, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-y') + + with gr.Row(variant='compact'): + w = gr.Slider(label='w', value=0.2, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-w') + h = gr.Slider(label='h', value=0.2, minimum=0.0, maximum=1.0, step=0.0001, elem_id=f'MD-{tab}-{i}-h') + + x.change(fn=None, inputs=x, outputs=x, _js=f'v => onBoxChange({is_t2i}, {i}, "x", v)', show_progress=False) + y.change(fn=None, inputs=y, outputs=y, _js=f'v => onBoxChange({is_t2i}, {i}, "y", v)', show_progress=False) + w.change(fn=None, inputs=w, outputs=w, _js=f'v => onBoxChange({is_t2i}, {i}, "w", v)', show_progress=False) + h.change(fn=None, inputs=h, outputs=h, _js=f'v => onBoxChange({is_t2i}, {i}, "h", v)', show_progress=False) + + prompt = gr.Text(show_label=False, placeholder=f'Prompt, will append to your {tab} prompt', max_lines=2, elem_id=f'MD-{tab}-{i}-prompt') + neg_prompt = gr.Text(show_label=False, placeholder='Negative Prompt, will also be appended', max_lines=1, elem_id=f'MD-{tab}-{i}-neg-prompt') + with gr.Row(variant='compact'): + seed = gr.Number(label='Seed', value=-1, visible=True, elem_id=f'MD-{tab}-{i}-seed') + random_seed = gr.Button(value='🎲', variant='tool', elem_id=f'MD-{tab}-{i}-random_seed') + reuse_seed = gr.Button(value='♻️', variant='tool', elem_id=f'MD-{tab}-{i}-reuse_seed') + random_seed.click(fn=lambda: -1, outputs=seed, show_progress=False) + reuse_seed.click(fn=None, inputs=seed, outputs=seed, _js=f'e => getSeedInfo({is_t2i}, {i+1}, e)', show_progress=False) + + control = [e, x, y, w, h, prompt, neg_prompt, blend_mode, feather_ratio, seed] + assert len(control) == NUM_BBOX_PARAMS + bbox_controls.extend(control) + + # NOTE: dynamically hard coded!! + load_regions_js = ''' + function onBoxChangeAll(ref_image, cfg_name, ...args) { + const is_t2i = %s; + const n_bbox = %d; + const n_ctrl = %d; + for (let i=0; iPlease test on small images before actual upscale. Default params require denoise <= 0.6
') + with gr.Row(variant='compact'): + noise_inverse_retouch = gr.Slider(minimum=1, maximum=100, step=0.1, label='Retouch', value=1, elem_id=uid('noise-inverse-retouch')) + noise_inverse_renoise_strength = gr.Slider(minimum=0, maximum=2, step=0.01, label='Renoise strength', value=1, elem_id=uid('noise-inverse-renoise-strength')) + noise_inverse_renoise_kernel = gr.Slider(minimum=2, maximum=512, step=1, label='Renoise kernel size', value=64, elem_id=uid('noise-inverse-renoise-kernel')) + + # The control includes txt2img and img2img, we use t2i and i2i to distinguish them + + return [ + enabled, method, + keep_input_size, + window_size, overlap, batch_size, + scale_factor, + noise_inverse, noise_inverse_steps, noise_inverse_retouch, noise_inverse_renoise_strength, noise_inverse_renoise_kernel, + control_tensor_cpu, + random_jitter, + c1,c2,c3,gaussian_filter,strength,sigma,batch_size_g,mixture_mode + ] + + + def process(self, p: Processing, + enabled: bool, method: str, + keep_input_size: bool, + window_size:int, overlap: int, tile_batch_size: int, + scale_factor: float, + noise_inverse: bool, noise_inverse_steps: int, noise_inverse_retouch: float, noise_inverse_renoise_strength: float, noise_inverse_renoise_kernel: int, + control_tensor_cpu: bool, + random_jitter:bool, + c1,c2,c3,gaussian_filter,strength,sigma,batch_size_g,mixture_mode + ): + + # unhijack & unhook, in case it broke at last time + self.reset() + p.mixture = mixture_mode + if not mixture_mode: + sigma = sigma/2 + if not enabled: return + + ''' upscale ''' + # store canvas size settings + if hasattr(p, "init_images"): + p.init_images_original_md = [img.copy() for img in p.init_images] + p.width_original_md = p.width + p.height_original_md = p.height + p.current_scale_num = 1 + p.gaussian_filter = gaussian_filter + p.scale_factor = int(scale_factor) + + is_img2img = hasattr(p, "init_images") and len(p.init_images) > 0 + if is_img2img: + init_img = p.init_images[0] + init_img = images.flatten(init_img, opts.img2img_background_color) + image = init_img + if keep_input_size: + p.width = image.width + p.height = image.height + p.width_original_md = p.width + p.height_original_md = p.height + else: #XXX:To adapt to noise inversion, we do not multiply the scale factor here + p.width = p.width_original_md + p.height = p.height_original_md + else: # txt2img + p.width = p.width_original_md + p.height = p.height_original_md + + if 'png info': + info = {} + p.extra_generation_params["Tiled Diffusion"] = info + + info['Method'] = method + info['Window Size'] = window_size + info['Tile Overlap'] = overlap + info['Tile batch size'] = tile_batch_size + info["Global batch size"] = batch_size_g + + if is_img2img: + info['Upscale factor'] = scale_factor + if keep_input_size: + info['Keep input size'] = keep_input_size + if noise_inverse: + info['NoiseInv'] = noise_inverse + info['NoiseInv Steps'] = noise_inverse_steps + info['NoiseInv Retouch'] = noise_inverse_retouch + info['NoiseInv Renoise strength'] = noise_inverse_renoise_strength + info['NoiseInv Kernel size'] = noise_inverse_renoise_kernel + + ''' ControlNet hackin ''' + try: + from scripts.cldm import ControlNet + + for script in p.scripts.scripts + p.scripts.alwayson_scripts: + if hasattr(script, "latest_network") and script.title().lower() == "controlnet": + self.controlnet_script = script + print("[Demo Fusion] ControlNet found, support is enabled.") + break + except ImportError: + pass + + ''' StableSR hackin ''' + for script in p.scripts.scripts: + if hasattr(script, "stablesr_model") and script.title().lower() == "stablesr": + if script.stablesr_model is not None: + self.stablesr_script = script + print("[Demo Fusion] StableSR found, support is enabled.") + break + + ''' hijack inner APIs, see unhijack in reset() ''' + Script.create_sampler_original_md = sd_samplers.create_sampler + + sd_samplers.create_sampler = lambda name, model: self.create_sampler_hijack( + name, model, p, Method_2(method), control_tensor_cpu,window_size, noise_inverse, noise_inverse_steps, noise_inverse_retouch, + noise_inverse_renoise_strength, noise_inverse_renoise_kernel, overlap, tile_batch_size,random_jitter,batch_size_g + ) + + + p.sample = lambda conditioning, unconditional_conditioning,seeds, subseeds, subseed_strength, prompts: self.sample_hijack( + conditioning, unconditional_conditioning, seeds, subseeds, subseed_strength, prompts,p, is_img2img, + window_size, overlap, tile_batch_size,random_jitter,c1,c2,c3,strength,sigma,batch_size_g) + + processing.create_infotext_ori = processing.create_infotext + + p.width_list = [p.height] + p.height_list = [p.height] + + processing.create_infotext = create_infotext_hijack + ## end + + + def postprocess_batch(self, p: Processing, enabled, *args, **kwargs): + if not enabled: return + + if self.delegate is not None: self.delegate.reset_controlnet_tensors() + + def postprocess_batch_list(self, p, pp, enabled, *args, **kwargs): + if not enabled: return + for idx,image in enumerate(pp.images): + idx_b = idx//p.batch_size + pp.images[idx] = image[:,:image.shape[1]//(p.scale_factor)*(idx_b+1),:image.shape[2]//(p.scale_factor)*(idx_b+1)] + p.seeds = [item for _ in range(p.scale_factor) for item in p.seeds] + p.prompts = [item for _ in range(p.scale_factor) for item in p.prompts] + p.all_negative_prompts = [item for _ in range(p.scale_factor) for item in p.all_negative_prompts] + p.negative_prompts = [item for _ in range(p.scale_factor) for item in p.negative_prompts] + if p.color_corrections != None: + p.color_corrections = [item for _ in range(p.scale_factor) for item in p.color_corrections] + p.width_list = [item*(idx+1) for idx in range(p.scale_factor) for item in [p.width for _ in range(p.batch_size)]] + p.height_list = [item*(idx+1) for idx in range(p.scale_factor) for item in [p.height for _ in range(p.batch_size)]] + return + + def postprocess(self, p: Processing, processed, enabled, *args): + if not enabled: return + # unhijack & unhook + self.reset() + + # restore canvas size settings + if hasattr(p, 'init_images') and hasattr(p, 'init_images_original_md'): + p.init_images.clear() # NOTE: do NOT change the list object, compatible with shallow copy of XYZ-plot + p.init_images.extend(p.init_images_original_md) + del p.init_images_original_md + p.width = p.width_original_md ; del p.width_original_md + p.height = p.height_original_md ; del p.height_original_md + + # clean up noise inverse latent for folder-based processing + if hasattr(p, 'noise_inverse_latent'): + del p.noise_inverse_latent + + ''' ↓↓↓ inner API hijack ↓↓↓ ''' + @torch.no_grad() + def sample_hijack(self, conditioning, unconditional_conditioning,seeds, subseeds, subseed_strength, prompts,p,image_ori,window_size, overlap, tile_batch_size,random_jitter,c1,c2,c3,strength,sigma,batch_size_g): + ################################################## Phase Initialization ###################################################### + + if not image_ori: + p.current_step = 0 + p.denoising_strength = strength + # p.sampler = sd_samplers.create_sampler(p.sampler_name, p.sd_model) #NOTE:Wrong but very useful. If corrected, please replace with the content with the following lines + # latents = p.rng.next() + + p.sampler = Script.create_sampler_original_md(p.sampler_name, p.sd_model) #scale + x = p.rng.next() + print("### Phase 1 Denoising ###") + latents = p.sampler.sample(p, x, conditioning, unconditional_conditioning, image_conditioning=p.txt2img_image_conditioning(x)) + latents_ = F.pad(latents, (0, latents.shape[3]*(p.scale_factor-1), 0, latents.shape[2]*(p.scale_factor-1))) + res = latents_ + del x + p.sampler = sd_samplers.create_sampler(p.sampler_name, p.sd_model) + starting_scale = 2 + else: # img2img + print("### Encoding Real Image ###") + latents = p.init_latent + starting_scale = 1 + + + anchor_mean = latents.mean() + anchor_std = latents.std() + + devices.torch_gc() + + ####################################################### Phase Upscaling ##################################################### + p.cosine_scale_1 = c1 + p.cosine_scale_2 = c2 + p.cosine_scale_3 = c3 + self.delegate.sig = sigma + p.latents = latents + for current_scale_num in range(starting_scale, p.scale_factor+1): + p.current_scale_num = current_scale_num + print("### Phase {} Denoising ###".format(current_scale_num)) + p.current_height = p.height_original_md * current_scale_num + p.current_width = p.width_original_md * current_scale_num + + + p.latents = F.interpolate(p.latents, size=(int(p.current_height / opt_f), int(p.current_width / opt_f)), mode='bicubic') + p.rng = rng.ImageRNG(p.latents.shape[1:], p.seeds, subseeds=p.subseeds, subseed_strength=p.subseed_strength, seed_resize_from_h=p.seed_resize_from_h, seed_resize_from_w=p.seed_resize_from_w) + + + self.delegate.w = int(p.current_width / opt_f) + self.delegate.h = int(p.current_height / opt_f) + self.delegate.get_views(overlap, tile_batch_size,batch_size_g) + + info = ', '.join([ + # f"{method.value} hooked into {name!r} sampler", + f"Tile size: {self.delegate.window_size}", + f"Tile count: {self.delegate.num_tiles}", + f"Batch size: {self.delegate.tile_bs}", + f"Tile batches: {len(self.delegate.batched_bboxes)}", + f"Global batch size: {self.delegate.global_tile_bs}", + f"Global batches: {len(self.delegate.global_batched_bboxes)}", + ]) + + print(info) + + noise = p.rng.next() + if hasattr(p,'initial_noise_multiplier'): + if p.initial_noise_multiplier != 1.0: + p.extra_generation_params["Noise multiplier"] = p.initial_noise_multiplier + noise *= p.initial_noise_multiplier + else: + p.image_conditioning = p.txt2img_image_conditioning(noise) + + p.noise = noise + p.x = p.latents.clone() + p.current_step=0 + + p.latents = p.sampler.sample_img2img(p,p.latents, noise , conditioning, unconditional_conditioning, image_conditioning=p.image_conditioning) + if self.flag_noise_inverse: + self.delegate.sampler_raw.sample_img2img = self.delegate.sample_img2img_original + self.flag_noise_inverse = False + + p.latents = (p.latents - p.latents.mean()) / p.latents.std() * anchor_std + anchor_mean + latents_ = F.pad(p.latents, (0, p.latents.shape[3]//current_scale_num*(p.scale_factor-current_scale_num), 0, p.latents.shape[2]//current_scale_num*(p.scale_factor-current_scale_num))) + if current_scale_num==1: + res = latents_ + else: + res = torch.concatenate((res,latents_),axis=0) + + ######################################################################################################################################### + + return res + + @staticmethod + def callback_hijack(self_sampler,d,p): + p.current_step = d['i'] + + if self_sampler.stop_at is not None and p.current_step > self_sampler.stop_at: + raise InterruptedException + + state.sampling_step = p.current_step + shared.total_tqdm.update() + p.current_step += 1 + + + def create_sampler_hijack( + self, name: str, model: LatentDiffusion, p: Processing, method: Method_2, control_tensor_cpu:bool,window_size, noise_inverse: bool, noise_inverse_steps: int, noise_inverse_retouch:float, + noise_inverse_renoise_strength: float, noise_inverse_renoise_kernel: int, overlap:int, tile_batch_size:int, random_jitter:bool,batch_size_g:int + ): + if self.delegate is not None: + # samplers are stateless, we reuse it if possible + if self.delegate.sampler_name == name: + # before we reuse the sampler, we refresh the control tensor + # so that we are compatible with ControlNet batch processing + if self.controlnet_script: + self.delegate.prepare_controlnet_tensors(refresh=True) + return self.delegate.sampler_raw + else: + self.reset() + sd_samplers_common.Sampler.callback_ori = sd_samplers_common.Sampler.callback_state + sd_samplers_common.Sampler.callback_state = lambda self_sampler,d:Script.callback_hijack(self_sampler,d,p) + + self.flag_noise_inverse = hasattr(p, "init_images") and len(p.init_images) > 0 and noise_inverse + flag_noise_inverse = self.flag_noise_inverse + if flag_noise_inverse: + print('warn: noise inversion only supports the "Euler" sampler, switch to it sliently...') + name = 'Euler' + p.sampler_name = 'Euler' + if name is None: print('>> name is empty') + if model is None: print('>> model is empty') + sampler = Script.create_sampler_original_md(name, model) + if method ==Method_2.DEMO_FU: delegate_cls = DemoFusion + else: raise NotImplementedError(f"Method {method} not implemented.") + + delegate = delegate_cls(p, sampler) + delegate.window_size = min(min(window_size,p.width//8),p.height//8) + p.random_jitter = random_jitter + + if flag_noise_inverse: + get_cache_callback = self.noise_inverse_get_cache + set_cache_callback = lambda x0, xt, prompts: self.noise_inverse_set_cache(p, x0, xt, prompts, noise_inverse_steps, noise_inverse_retouch) + delegate.init_noise_inverse(noise_inverse_steps, noise_inverse_retouch, get_cache_callback, set_cache_callback, noise_inverse_renoise_strength, noise_inverse_renoise_kernel) + + # delegate.get_views(overlap,tile_batch_size,batch_size_g) + if self.controlnet_script: + delegate.init_controlnet(self.controlnet_script, control_tensor_cpu) + if self.stablesr_script: + delegate.init_stablesr(self.stablesr_script) + + # init everything done, perform sanity check & pre-computations + # hijack the behaviours + delegate.hook() + + self.delegate = delegate + + exts = [ + "ContrlNet" if self.controlnet_script else None, + "StableSR" if self.stablesr_script else None, + ] + ext_info = ', '.join([e for e in exts if e]) + if ext_info: ext_info = f' (ext: {ext_info})' + print(ext_info) + + return delegate.sampler_raw + + def create_random_tensors_hijack( + self, bbox_settings: Dict, region_info: Dict, + shape, seeds, subseeds=None, subseed_strength=0.0, seed_resize_from_h=0, seed_resize_from_w=0, p=None, + ): + org_random_tensors = Script.create_random_tensors_original_md(shape, seeds, subseeds, subseed_strength, seed_resize_from_h, seed_resize_from_w, p) + height, width = shape[1], shape[2] + background_noise = torch.zeros_like(org_random_tensors) + background_noise_count = torch.zeros((1, 1, height, width), device=org_random_tensors.device) + foreground_noise = torch.zeros_like(org_random_tensors) + foreground_noise_count = torch.zeros((1, 1, height, width), device=org_random_tensors.device) + + for i, v in bbox_settings.items(): + seed = get_fixed_seed(v.seed) + x, y, w, h = v.x, v.y, v.w, v.h + # convert to pixel + x = int(x * width) + y = int(y * height) + w = math.ceil(w * width) + h = math.ceil(h * height) + # clamp + x = max(0, x) + y = max(0, y) + w = min(width - x, w) + h = min(height - y, h) + # create random tensor + torch.manual_seed(seed) + rand_tensor = torch.randn((1, org_random_tensors.shape[1], h, w), device=devices.cpu) + if BlendMode(v.blend_mode) == BlendMode.BACKGROUND: + background_noise [:, :, y:y+h, x:x+w] += rand_tensor.to(background_noise.device) + background_noise_count[:, :, y:y+h, x:x+w] += 1 + elif BlendMode(v.blend_mode) == BlendMode.FOREGROUND: + foreground_noise [:, :, y:y+h, x:x+w] += rand_tensor.to(foreground_noise.device) + foreground_noise_count[:, :, y:y+h, x:x+w] += 1 + else: + raise NotImplementedError + region_info['Region ' + str(i+1)]['seed'] = seed + + # average + background_noise = torch.where(background_noise_count > 1, background_noise / background_noise_count, background_noise) + foreground_noise = torch.where(foreground_noise_count > 1, foreground_noise / foreground_noise_count, foreground_noise) + # paste two layers to original random tensor + org_random_tensors = torch.where(background_noise_count > 0, background_noise, org_random_tensors) + org_random_tensors = torch.where(foreground_noise_count > 0, foreground_noise, org_random_tensors) + return org_random_tensors + + ''' ↓↓↓ helper methods ↓↓↓ ''' + + def dump_regions(self, cfg_name, *bbox_controls): + if not cfg_name: return gr_value(f'Config file name cannot be empty.', visible=True) + + bbox_settings = build_bbox_settings(bbox_controls) + data = {'bbox_controls': [v._asdict() for v in bbox_settings.values()]} + + if not os.path.exists(CFG_PATH): os.makedirs(CFG_PATH) + fp = os.path.join(CFG_PATH, cfg_name) + with open(fp, 'w', encoding='utf-8') as fh: + json.dump(data, fh, indent=2, ensure_ascii=False) + + return gr_value(f'Config saved to {fp}.', visible=True) + + def load_regions(self, ref_image, cfg_name, *bbox_controls): + if ref_image is None: + return [gr_value(v) for v in bbox_controls] + [gr_value(f'Please create or upload a ref image first.', visible=True)] + fp = os.path.join(CFG_PATH, cfg_name) + if not os.path.exists(fp): + return [gr_value(v) for v in bbox_controls] + [gr_value(f'Config {fp} not found.', visible=True)] + + try: + with open(fp, 'r', encoding='utf-8') as fh: + data = json.load(fh) + except Exception as e: + return [gr_value(v) for v in bbox_controls] + [gr_value(f'Failed to load config {fp}: {e}', visible=True)] + + num_boxes = len(data['bbox_controls']) + data_list = [] + for i in range(BBOX_MAX_NUM): + if i < num_boxes: + for k in BBoxSettings._fields: + if k in data['bbox_controls'][i]: + data_list.append(data['bbox_controls'][i][k]) + else: + data_list.append(None) + else: + data_list.extend(DEFAULT_BBOX_SETTINGS) + + return [gr_value(v) for v in data_list] + [gr_value(f'Config loaded from {fp}.', visible=True)] + + + def noise_inverse_set_cache(self, p: ProcessingImg2Img, x0: Tensor, xt: Tensor, prompts: List[str], steps: int, retouch:float): + self.noise_inverse_cache = NoiseInverseCache(p.sd_model.sd_model_hash, x0, xt, steps, retouch, prompts) + + def noise_inverse_get_cache(self): + return self.noise_inverse_cache + + + def reset(self): + ''' unhijack inner APIs, see hijack in process() ''' + if hasattr(Script, "create_sampler_original_md"): + sd_samplers.create_sampler = Script.create_sampler_original_md + del Script.create_sampler_original_md + if hasattr(Script, "create_random_tensors_original_md"): + processing.create_random_tensors = Script.create_random_tensors_original_md + del Script.create_random_tensors_original_md + if hasattr(sd_samplers_common.Sampler, "callback_ori"): + sd_samplers_common.Sampler.callback_state = sd_samplers_common.Sampler.callback_ori + del sd_samplers_common.Sampler.callback_ori + if hasattr(processing, "create_infotext_ori"): + processing.create_infotext = processing.create_infotext_ori + del processing.create_infotext_ori + DemoFusion.unhook() + self.delegate = None + + def reset_and_gc(self): + self.reset() + self.noise_inverse_cache = None + + import gc; gc.collect() + devices.torch_gc() + + try: + import os + import psutil + mem = psutil.Process(os.getpid()).memory_info() + print(f'[Mem] rss: {mem.rss/2**30:.3f} GB, vms: {mem.vms/2**30:.3f} GB') + from modules.shared import mem_mon as vram_mon + from modules.memmon import MemUsageMonitor + vram_mon: MemUsageMonitor + free, total = vram_mon.cuda_mem_get_info() + print(f'[VRAM] free: {free/2**30:.3f} GB, total: {total/2**30:.3f} GB') + except: + pass diff --git a/extensions/multidiffusion-upscaler-for-automatic1111/scripts/tilevae.py b/extensions/multidiffusion-upscaler-for-automatic1111/scripts/tilevae.py new file mode 100644 index 0000000000000000000000000000000000000000..5f4ed4a2e3b0e0213911cb8d289fb2d36d974d9c --- /dev/null +++ b/extensions/multidiffusion-upscaler-for-automatic1111/scripts/tilevae.py @@ -0,0 +1,758 @@ +''' +# ------------------------------------------------------------------------ +# +# Tiled VAE +# +# Introducing a revolutionary new optimization designed to make +# the VAE work with giant images on limited VRAM! +# Say goodbye to the frustration of OOM and hello to seamless output! +# +# ------------------------------------------------------------------------ +# +# This script is a wild hack that splits the image into tiles, +# encodes each tile separately, and merges the result back together. +# +# Advantages: +# - The VAE can now work with giant images on limited VRAM +# (~10 GB for 8K images!) +# - The merged output is completely seamless without any post-processing. +# +# Drawbacks: +# - NaNs always appear in for 8k images when you use fp16 (half) VAE +# You must use --no-half-vae to disable half VAE for that giant image. +# - The gradient calculation is not compatible with this hack. It +# will break any backward() or torch.autograd.grad() that passes VAE. +# (But you can still use the VAE to generate training data.) +# +# How it works: +# 1. The image is split into tiles, which are then padded with 11/32 pixels' in the decoder/encoder. +# 2. When Fast Mode is disabled: +# 1. The original VAE forward is decomposed into a task queue and a task worker, which starts to process each tile. +# 2. When GroupNorm is needed, it suspends, stores current GroupNorm mean and var, send everything to RAM, and turns to the next tile. +# 3. After all GroupNorm means and vars are summarized, it applies group norm to tiles and continues. +# 4. A zigzag execution order is used to reduce unnecessary data transfer. +# 3. When Fast Mode is enabled: +# 1. The original input is downsampled and passed to a separate task queue. +# 2. Its group norm parameters are recorded and used by all tiles' task queues. +# 3. Each tile is separately processed without any RAM-VRAM data transfer. +# 4. After all tiles are processed, tiles are written to a result buffer and returned. +# Encoder color fix = only estimate GroupNorm before downsampling, i.e., run in a semi-fast mode. +# +# Enjoy! +# +# @Author: LI YI @ Nanyang Technological University - Singapore +# @Date: 2023-03-02 +# @License: CC BY-NC-SA 4.0 +# +# Please give me a star if you like this project! +# +# ------------------------------------------------------------------------- +''' + +import gc +import math +from time import time +from tqdm import tqdm + +import torch +import torch.version +import torch.nn.functional as F +import gradio as gr + +import modules.scripts as scripts +import modules.devices as devices +from modules.shared import state, opts +from modules.ui import gr_show +from modules.processing import opt_f +from modules.sd_vae_approx import cheap_approximation +from ldm.modules.diffusionmodules.model import AttnBlock, MemoryEfficientAttnBlock + +from tile_utils.attn import get_attn_func +from tile_utils.typing import Processing + +if hasattr(opts, 'hypertile_enable_unet'): # webui >= 1.7 + from modules.ui_components import InputAccordion +else: + InputAccordion = None + + +def get_rcmd_enc_tsize(): + if torch.cuda.is_available() and devices.device not in ['cpu', devices.cpu]: + total_memory = torch.cuda.get_device_properties(devices.device).total_memory // 2**20 + if total_memory > 16*1000: ENCODER_TILE_SIZE = 3072 + elif total_memory > 12*1000: ENCODER_TILE_SIZE = 2048 + elif total_memory > 8*1000: ENCODER_TILE_SIZE = 1536 + else: ENCODER_TILE_SIZE = 960 + else: ENCODER_TILE_SIZE = 512 + return ENCODER_TILE_SIZE + + +def get_rcmd_dec_tsize(): + if torch.cuda.is_available() and devices.device not in ['cpu', devices.cpu]: + total_memory = torch.cuda.get_device_properties(devices.device).total_memory // 2**20 + if total_memory > 30*1000: DECODER_TILE_SIZE = 256 + elif total_memory > 16*1000: DECODER_TILE_SIZE = 192 + elif total_memory > 12*1000: DECODER_TILE_SIZE = 128 + elif total_memory > 8*1000: DECODER_TILE_SIZE = 96 + else: DECODER_TILE_SIZE = 64 + else: DECODER_TILE_SIZE = 64 + return DECODER_TILE_SIZE + + +def inplace_nonlinearity(x): + # Test: fix for Nans + return F.silu(x, inplace=True) + + +def attn2task(task_queue, net): + attn_forward = get_attn_func() + task_queue.append(('store_res', lambda x: x)) + task_queue.append(('pre_norm', net.norm)) + task_queue.append(('attn', lambda x, net=net: attn_forward(net, x))) + task_queue.append(['add_res', None]) + + +def resblock2task(queue, block): + """ + Turn a ResNetBlock into a sequence of tasks and append to the task queue + + @param queue: the target task queue + @param block: ResNetBlock + + """ + if block.in_channels != block.out_channels: + if block.use_conv_shortcut: + queue.append(('store_res', block.conv_shortcut)) + else: + queue.append(('store_res', block.nin_shortcut)) + else: + queue.append(('store_res', lambda x: x)) + queue.append(('pre_norm', block.norm1)) + queue.append(('silu', inplace_nonlinearity)) + queue.append(('conv1', block.conv1)) + queue.append(('pre_norm', block.norm2)) + queue.append(('silu', inplace_nonlinearity)) + queue.append(('conv2', block.conv2)) + queue.append(['add_res', None]) + + +def build_sampling(task_queue, net, is_decoder): + """ + Build the sampling part of a task queue + @param task_queue: the target task queue + @param net: the network + @param is_decoder: currently building decoder or encoder + """ + if is_decoder: + resblock2task(task_queue, net.mid.block_1) + attn2task(task_queue, net.mid.attn_1) + resblock2task(task_queue, net.mid.block_2) + resolution_iter = reversed(range(net.num_resolutions)) + block_ids = net.num_res_blocks + 1 + condition = 0 + module = net.up + func_name = 'upsample' + else: + resolution_iter = range(net.num_resolutions) + block_ids = net.num_res_blocks + condition = net.num_resolutions - 1 + module = net.down + func_name = 'downsample' + + for i_level in resolution_iter: + for i_block in range(block_ids): + resblock2task(task_queue, module[i_level].block[i_block]) + if i_level != condition: + task_queue.append((func_name, getattr(module[i_level], func_name))) + + if not is_decoder: + resblock2task(task_queue, net.mid.block_1) + attn2task(task_queue, net.mid.attn_1) + resblock2task(task_queue, net.mid.block_2) + + +def build_task_queue(net, is_decoder): + """ + Build a single task queue for the encoder or decoder + @param net: the VAE decoder or encoder network + @param is_decoder: currently building decoder or encoder + @return: the task queue + """ + task_queue = [] + task_queue.append(('conv_in', net.conv_in)) + + # construct the sampling part of the task queue + # because encoder and decoder share the same architecture, we extract the sampling part + build_sampling(task_queue, net, is_decoder) + + if not is_decoder or not net.give_pre_end: + task_queue.append(('pre_norm', net.norm_out)) + task_queue.append(('silu', inplace_nonlinearity)) + task_queue.append(('conv_out', net.conv_out)) + if is_decoder and net.tanh_out: + task_queue.append(('tanh', torch.tanh)) + + return task_queue + + +def clone_task_queue(task_queue): + """ + Clone a task queue + @param task_queue: the task queue to be cloned + @return: the cloned task queue + """ + return [[item for item in task] for task in task_queue] + + +def get_var_mean(input, num_groups, eps=1e-6): + """ + Get mean and var for group norm + """ + b, c = input.size(0), input.size(1) + channel_in_group = int(c/num_groups) + input_reshaped = input.contiguous().view(1, int(b * num_groups), channel_in_group, *input.size()[2:]) + var, mean = torch.var_mean(input_reshaped, dim=[0, 2, 3, 4], unbiased=False) + return var, mean + + +def custom_group_norm(input, num_groups, mean, var, weight=None, bias=None, eps=1e-6): + """ + Custom group norm with fixed mean and var + + @param input: input tensor + @param num_groups: number of groups. by default, num_groups = 32 + @param mean: mean, must be pre-calculated by get_var_mean + @param var: var, must be pre-calculated by get_var_mean + @param weight: weight, should be fetched from the original group norm + @param bias: bias, should be fetched from the original group norm + @param eps: epsilon, by default, eps = 1e-6 to match the original group norm + + @return: normalized tensor + """ + b, c = input.size(0), input.size(1) + channel_in_group = int(c/num_groups) + input_reshaped = input.contiguous().view( + 1, int(b * num_groups), channel_in_group, *input.size()[2:]) + + out = F.batch_norm(input_reshaped, mean.to(input), var.to(input), weight=None, bias=None, training=False, momentum=0, eps=eps) + out = out.view(b, c, *input.size()[2:]) + + # post affine transform + if weight is not None: + out *= weight.view(1, -1, 1, 1) + if bias is not None: + out += bias.view(1, -1, 1, 1) + return out + + +def crop_valid_region(x, input_bbox, target_bbox, is_decoder): + """ + Crop the valid region from the tile + @param x: input tile + @param input_bbox: original input bounding box + @param target_bbox: output bounding box + @param scale: scale factor + @return: cropped tile + """ + padded_bbox = [i * 8 if is_decoder else i//8 for i in input_bbox] + margin = [target_bbox[i] - padded_bbox[i] for i in range(4)] + return x[:, :, margin[2]:x.size(2)+margin[3], margin[0]:x.size(3)+margin[1]] + + +# ↓↓↓ https://github.com/Kahsolt/stable-diffusion-webui-vae-tile-infer ↓↓↓ + +def perfcount(fn): + def wrapper(*args, **kwargs): + ts = time() + + if torch.cuda.is_available(): + torch.cuda.reset_peak_memory_stats(devices.device) + devices.torch_gc() + gc.collect() + + ret = fn(*args, **kwargs) + + devices.torch_gc() + gc.collect() + if torch.cuda.is_available(): + vram = torch.cuda.max_memory_allocated(devices.device) / 2**20 + print(f'[Tiled VAE]: Done in {time() - ts:.3f}s, max VRAM alloc {vram:.3f} MB') + else: + print(f'[Tiled VAE]: Done in {time() - ts:.3f}s') + + return ret + return wrapper + +# ↑↑↑ https://github.com/Kahsolt/stable-diffusion-webui-vae-tile-infer ↑↑↑ + + +class GroupNormParam: + + def __init__(self): + self.var_list = [] + self.mean_list = [] + self.pixel_list = [] + self.weight = None + self.bias = None + + def add_tile(self, tile, layer): + var, mean = get_var_mean(tile, 32) + # For giant images, the variance can be larger than max float16 + # In this case we create a copy to float32 + if var.dtype == torch.float16 and var.isinf().any(): + fp32_tile = tile.float() + var, mean = get_var_mean(fp32_tile, 32) + # ============= DEBUG: test for infinite ============= + # if torch.isinf(var).any(): + # print('var: ', var) + # ==================================================== + self.var_list.append(var) + self.mean_list.append(mean) + self.pixel_list.append( + tile.shape[2]*tile.shape[3]) + if hasattr(layer, 'weight'): + self.weight = layer.weight + self.bias = layer.bias + else: + self.weight = None + self.bias = None + + def summary(self): + """ + summarize the mean and var and return a function + that apply group norm on each tile + """ + if len(self.var_list) == 0: return None + + var = torch.vstack(self.var_list) + mean = torch.vstack(self.mean_list) + max_value = max(self.pixel_list) + pixels = torch.tensor(self.pixel_list, dtype=torch.float32, device=devices.device) / max_value + sum_pixels = torch.sum(pixels) + pixels = pixels.unsqueeze(1) / sum_pixels + var = torch.sum(var * pixels, dim=0) + mean = torch.sum(mean * pixels, dim=0) + return lambda x: custom_group_norm(x, 32, mean, var, self.weight, self.bias) + + @staticmethod + def from_tile(tile, norm): + """ + create a function from a single tile without summary + """ + var, mean = get_var_mean(tile, 32) + if var.dtype == torch.float16 and var.isinf().any(): + fp32_tile = tile.float() + var, mean = get_var_mean(fp32_tile, 32) + # if it is a macbook, we need to convert back to float16 + if var.device.type == 'mps': + # clamp to avoid overflow + var = torch.clamp(var, 0, 60000) + var = var.half() + mean = mean.half() + if hasattr(norm, 'weight'): + weight = norm.weight + bias = norm.bias + else: + weight = None + bias = None + + def group_norm_func(x, mean=mean, var=var, weight=weight, bias=bias): + return custom_group_norm(x, 32, mean, var, weight, bias, 1e-6) + return group_norm_func + + +class VAEHook: + + def __init__(self, net, tile_size, is_decoder:bool, fast_decoder:bool, fast_encoder:bool, color_fix:bool, to_gpu:bool=False): + self.net = net # encoder | decoder + self.tile_size = tile_size + self.is_decoder = is_decoder + self.fast_mode = (fast_encoder and not is_decoder) or (fast_decoder and is_decoder) + self.color_fix = color_fix and not is_decoder + self.to_gpu = to_gpu + self.pad = 11 if is_decoder else 32 # FIXME: magic number + + def __call__(self, x): + original_device = next(self.net.parameters()).device + try: + if self.to_gpu: + self.net = self.net.to(devices.get_optimal_device()) + + B, C, H, W = x.shape + if max(H, W) <= self.pad * 2 + self.tile_size: + print("[Tiled VAE]: the input size is tiny and unnecessary to tile.") + return self.net.original_forward(x) + else: + return self.vae_tile_forward(x) + finally: + self.net = self.net.to(original_device) + + def get_best_tile_size(self, lowerbound, upperbound): + """ + Get the best tile size for GPU memory + """ + divider = 32 + while divider >= 2: + remainer = lowerbound % divider + if remainer == 0: + return lowerbound + candidate = lowerbound - remainer + divider + if candidate <= upperbound: + return candidate + divider //= 2 + return lowerbound + + def split_tiles(self, h, w): + """ + Tool function to split the image into tiles + @param h: height of the image + @param w: width of the image + @return: tile_input_bboxes, tile_output_bboxes + """ + tile_input_bboxes, tile_output_bboxes = [], [] + tile_size = self.tile_size + pad = self.pad + num_height_tiles = math.ceil((h - 2 * pad) / tile_size) + num_width_tiles = math.ceil((w - 2 * pad) / tile_size) + # If any of the numbers are 0, we let it be 1 + # This is to deal with long and thin images + num_height_tiles = max(num_height_tiles, 1) + num_width_tiles = max(num_width_tiles, 1) + + # Suggestions from https://github.com/Kahsolt: auto shrink the tile size + real_tile_height = math.ceil((h - 2 * pad) / num_height_tiles) + real_tile_width = math.ceil((w - 2 * pad) / num_width_tiles) + real_tile_height = self.get_best_tile_size(real_tile_height, tile_size) + real_tile_width = self.get_best_tile_size(real_tile_width, tile_size) + + print(f'[Tiled VAE]: split to {num_height_tiles}x{num_width_tiles} = {num_height_tiles*num_width_tiles} tiles. ' + + f'Optimal tile size {real_tile_width}x{real_tile_height}, original tile size {tile_size}x{tile_size}') + + for i in range(num_height_tiles): + for j in range(num_width_tiles): + # bbox: [x1, x2, y1, y2] + # the padding is is unnessary for image borders. So we directly start from (32, 32) + input_bbox = [ + pad + j * real_tile_width, + min(pad + (j + 1) * real_tile_width, w), + pad + i * real_tile_height, + min(pad + (i + 1) * real_tile_height, h), + ] + + # if the output bbox is close to the image boundary, we extend it to the image boundary + output_bbox = [ + input_bbox[0] if input_bbox[0] > pad else 0, + input_bbox[1] if input_bbox[1] < w - pad else w, + input_bbox[2] if input_bbox[2] > pad else 0, + input_bbox[3] if input_bbox[3] < h - pad else h, + ] + + # scale to get the final output bbox + output_bbox = [x * 8 if self.is_decoder else x // 8 for x in output_bbox] + tile_output_bboxes.append(output_bbox) + + # indistinguishable expand the input bbox by pad pixels + tile_input_bboxes.append([ + max(0, input_bbox[0] - pad), + min(w, input_bbox[1] + pad), + max(0, input_bbox[2] - pad), + min(h, input_bbox[3] + pad), + ]) + + return tile_input_bboxes, tile_output_bboxes + + @torch.no_grad() + def estimate_group_norm(self, z, task_queue, color_fix): + device = z.device + tile = z + last_id = len(task_queue) - 1 + while last_id >= 0 and task_queue[last_id][0] != 'pre_norm': + last_id -= 1 + if last_id <= 0 or task_queue[last_id][0] != 'pre_norm': + raise ValueError('No group norm found in the task queue') + # estimate until the last group norm + for i in range(last_id + 1): + task = task_queue[i] + if task[0] == 'pre_norm': + group_norm_func = GroupNormParam.from_tile(tile, task[1]) + task_queue[i] = ('apply_norm', group_norm_func) + if i == last_id: + return True + tile = group_norm_func(tile) + elif task[0] == 'store_res': + task_id = i + 1 + while task_id < last_id and task_queue[task_id][0] != 'add_res': + task_id += 1 + if task_id >= last_id: + continue + task_queue[task_id][1] = task[1](tile) + elif task[0] == 'add_res': + tile += task[1].to(device) + task[1] = None + elif color_fix and task[0] == 'downsample': + for j in range(i, last_id + 1): + if task_queue[j][0] == 'store_res': + task_queue[j] = ('store_res_cpu', task_queue[j][1]) + return True + else: + tile = task[1](tile) + try: + devices.test_for_nans(tile, "vae") + except: + print(f'Nan detected in fast mode estimation. Fast mode disabled.') + return False + + raise IndexError('Should not reach here') + + @perfcount + @torch.no_grad() + def vae_tile_forward(self, z): + """ + Decode a latent vector z into an image in a tiled manner. + @param z: latent vector + @return: image + """ + device = next(self.net.parameters()).device + dtype = next(self.net.parameters()).dtype + net = self.net + tile_size = self.tile_size + is_decoder = self.is_decoder + + z = z.detach() # detach the input to avoid backprop + + N, height, width = z.shape[0], z.shape[2], z.shape[3] + net.last_z_shape = z.shape + + # Split the input into tiles and build a task queue for each tile + print(f'[Tiled VAE]: input_size: {z.shape}, tile_size: {tile_size}, padding: {self.pad}') + + in_bboxes, out_bboxes = self.split_tiles(height, width) + + # Prepare tiles by split the input latents + tiles = [] + for input_bbox in in_bboxes: + tile = z[:, :, input_bbox[2]:input_bbox[3], input_bbox[0]:input_bbox[1]].cpu() + tiles.append(tile) + + num_tiles = len(tiles) + num_completed = 0 + + # Build task queues + single_task_queue = build_task_queue(net, is_decoder) + if self.fast_mode: + # Fast mode: downsample the input image to the tile size, + # then estimate the group norm parameters on the downsampled image + scale_factor = tile_size / max(height, width) + z = z.to(device) + downsampled_z = F.interpolate(z, scale_factor=scale_factor, mode='nearest-exact') + # use nearest-exact to keep statictics as close as possible + print(f'[Tiled VAE]: Fast mode enabled, estimating group norm parameters on {downsampled_z.shape[3]} x {downsampled_z.shape[2]} image') + + # ======= Special thanks to @Kahsolt for distribution shift issue ======= # + # The downsampling will heavily distort its mean and std, so we need to recover it. + std_old, mean_old = torch.std_mean(z, dim=[0, 2, 3], keepdim=True) + std_new, mean_new = torch.std_mean(downsampled_z, dim=[0, 2, 3], keepdim=True) + downsampled_z = (downsampled_z - mean_new) / std_new * std_old + mean_old + del std_old, mean_old, std_new, mean_new + # occasionally the std_new is too small or too large, which exceeds the range of float16 + # so we need to clamp it to max z's range. + downsampled_z = torch.clamp_(downsampled_z, min=z.min(), max=z.max()) + estimate_task_queue = clone_task_queue(single_task_queue) + if self.estimate_group_norm(downsampled_z, estimate_task_queue, color_fix=self.color_fix): + single_task_queue = estimate_task_queue + del downsampled_z + + task_queues = [clone_task_queue(single_task_queue) for _ in range(num_tiles)] + + # Dummy result + result = None + result_approx = None + try: + with devices.autocast(): + result_approx = torch.cat([F.interpolate(cheap_approximation(x).unsqueeze(0), scale_factor=opt_f, mode='nearest-exact') for x in z], dim=0).cpu() + except: pass + # Free memory of input latent tensor + del z + + # Task queue execution + pbar = tqdm(total=num_tiles * len(task_queues[0]), desc=f"[Tiled VAE]: Executing {'Decoder' if is_decoder else 'Encoder'} Task Queue: ") + + # execute the task back and forth when switch tiles so that we always + # keep one tile on the GPU to reduce unnecessary data transfer + forward = True + interrupted = False + #state.interrupted = interrupted + while True: + if state.interrupted: interrupted = True ; break + + group_norm_param = GroupNormParam() + for i in range(num_tiles) if forward else reversed(range(num_tiles)): + if state.interrupted: interrupted = True ; break + + tile = tiles[i].to(device) + input_bbox = in_bboxes[i] + task_queue = task_queues[i] + + interrupted = False + while len(task_queue) > 0: + if state.interrupted: interrupted = True ; break + + # DEBUG: current task + # print('Running task: ', task_queue[0][0], ' on tile ', i, '/', num_tiles, ' with shape ', tile.shape) + task = task_queue.pop(0) + if task[0] == 'pre_norm': + group_norm_param.add_tile(tile, task[1]) + break + elif task[0] == 'store_res' or task[0] == 'store_res_cpu': + task_id = 0 + res = task[1](tile) + if not self.fast_mode or task[0] == 'store_res_cpu': + res = res.cpu() + while task_queue[task_id][0] != 'add_res': + task_id += 1 + task_queue[task_id][1] = res + elif task[0] == 'add_res': + tile += task[1].to(device) + task[1] = None + else: + tile = task[1](tile) + pbar.update(1) + + if interrupted: break + + # check for NaNs in the tile. + # If there are NaNs, we abort the process to save user's time + devices.test_for_nans(tile, "vae") + + if len(task_queue) == 0: + tiles[i] = None + num_completed += 1 + if result is None: # NOTE: dim C varies from different cases, can only be inited dynamically + result = torch.zeros((N, tile.shape[1], height * 8 if is_decoder else height // 8, width * 8 if is_decoder else width // 8), device=device, requires_grad=False) + result[:, :, out_bboxes[i][2]:out_bboxes[i][3], out_bboxes[i][0]:out_bboxes[i][1]] = crop_valid_region(tile, in_bboxes[i], out_bboxes[i], is_decoder) + del tile + elif i == num_tiles - 1 and forward: + forward = False + tiles[i] = tile + elif i == 0 and not forward: + forward = True + tiles[i] = tile + else: + tiles[i] = tile.cpu() + del tile + + if interrupted: break + if num_completed == num_tiles: break + + # insert the group norm task to the head of each task queue + group_norm_func = group_norm_param.summary() + if group_norm_func is not None: + for i in range(num_tiles): + task_queue = task_queues[i] + task_queue.insert(0, ('apply_norm', group_norm_func)) + + # Done! + pbar.close() + return result.to(dtype) if result is not None else result_approx.to(device, dtype=dtype) + + +class Script(scripts.Script): + + def __init__(self): + self.hooked = False + + def title(self): + return "Tiled VAE" + + def show(self, is_img2img): + return scripts.AlwaysVisible + + def ui(self, is_img2img): + tab = 't2i' if not is_img2img else 'i2i' + uid = lambda name: f'MD-{tab}-{name}' + + with ( + InputAccordion(False, label='Tiled VAE', elem_id=f'MDV-{tab}-enabled') if InputAccordion + else gr.Accordion('Tiled VAE', open=False, elem_id=f'MDV-{tab}') + as enabled + ): + with gr.Row() as tab_enable: + if not InputAccordion: + enabled = gr.Checkbox(label='Enable Tiled VAE', value=False, elem_id=uid('enable')) + vae_to_gpu = gr.Checkbox(label='Move VAE to GPU (if possible)', value=True, elem_id=uid('vae2gpu')) + + gr.HTML('Recommended to set tile sizes as large as possible before got CUDA error: out of memory.
') + with gr.Row() as tab_size: + encoder_tile_size = gr.Slider(label='Encoder Tile Size', minimum=256, maximum=4096, step=16, value=get_rcmd_enc_tsize(), elem_id=uid('enc-size')) + decoder_tile_size = gr.Slider(label='Decoder Tile Size', minimum=48, maximum=512, step=16, value=get_rcmd_dec_tsize(), elem_id=uid('dec-size')) + reset = gr.Button(value='↻ Reset', variant='tool') + reset.click(fn=lambda: [get_rcmd_enc_tsize(), get_rcmd_dec_tsize()], outputs=[encoder_tile_size, decoder_tile_size], show_progress=False) + + with gr.Row() as tab_param: + fast_encoder = gr.Checkbox(label='Fast Encoder', value=True, elem_id=uid('fastenc')) + color_fix = gr.Checkbox(label='Fast Encoder Color Fix', value=False, visible=True, elem_id=uid('fastenc-colorfix')) + fast_decoder = gr.Checkbox(label='Fast Decoder', value=True, elem_id=uid('fastdec')) + + fast_encoder.change(fn=gr_show, inputs=fast_encoder, outputs=color_fix, show_progress=False) + + return [ + enabled, + encoder_tile_size, decoder_tile_size, + vae_to_gpu, fast_decoder, fast_encoder, color_fix, + ] + + def process(self, p:Processing, + enabled:bool, + encoder_tile_size:int, decoder_tile_size:int, + vae_to_gpu:bool, fast_decoder:bool, fast_encoder:bool, color_fix:bool + ): + + # for shorthand + vae = p.sd_model.first_stage_model + encoder = vae.encoder + decoder = vae.decoder + + # undo hijack if disabled (in cases last time crashed) + if not enabled: + if self.hooked: + if isinstance(encoder.forward, VAEHook): + encoder.forward.net = None + encoder.forward = encoder.original_forward + if isinstance(decoder.forward, VAEHook): + decoder.forward.net = None + decoder.forward = decoder.original_forward + self.hooked = False + return + + if devices.get_optimal_device_name().startswith('cuda') and vae.device == devices.cpu and not vae_to_gpu: + print("[Tiled VAE] warn: VAE is not on GPU, check 'Move VAE to GPU' if possible.") + + # do hijack + kwargs = { + 'fast_decoder': fast_decoder, + 'fast_encoder': fast_encoder, + 'color_fix': color_fix, + 'to_gpu': vae_to_gpu, + } + + # save original forward (only once) + if not hasattr(encoder, 'original_forward'): setattr(encoder, 'original_forward', encoder.forward) + if not hasattr(decoder, 'original_forward'): setattr(decoder, 'original_forward', decoder.forward) + + self.hooked = True + + encoder.forward = VAEHook(encoder, encoder_tile_size, is_decoder=False, **kwargs) + decoder.forward = VAEHook(decoder, decoder_tile_size, is_decoder=True, **kwargs) + + def postprocess(self, p:Processing, processed, enabled:bool, *args): + if not enabled: return + + vae = p.sd_model.first_stage_model + encoder = vae.encoder + decoder = vae.decoder + if isinstance(encoder.forward, VAEHook): + encoder.forward.net = None + encoder.forward = encoder.original_forward + if isinstance(decoder.forward, VAEHook): + decoder.forward.net = None + decoder.forward = decoder.original_forward diff --git a/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/abstractdiffusion.cpython-310.pyc b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/abstractdiffusion.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..e66ae03f7edca430c79106c46dd4c4c7c1a93c46 Binary files /dev/null and b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/abstractdiffusion.cpython-310.pyc differ diff --git a/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/demofusion.cpython-310.pyc b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/demofusion.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..65a76e620772a7c636a546cbc3a2ac303aa288fc Binary files /dev/null and b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/demofusion.cpython-310.pyc differ diff --git a/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/mixtureofdiffusers.cpython-310.pyc b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/mixtureofdiffusers.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..5be405eb4d1624ef8cc57438115d225ef2c11847 Binary files /dev/null and b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/mixtureofdiffusers.cpython-310.pyc differ diff --git a/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/multidiffusion.cpython-310.pyc b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/multidiffusion.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..17f15474153a32a34eabe560a548593b8302fe87 Binary files /dev/null and b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/__pycache__/multidiffusion.cpython-310.pyc differ diff --git a/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/abstractdiffusion.py b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/abstractdiffusion.py new file mode 100644 index 0000000000000000000000000000000000000000..88916f3881479355d6ac0ab0425836a09255e126 --- /dev/null +++ b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/abstractdiffusion.py @@ -0,0 +1,747 @@ +from tile_utils.utils import * + + +class AbstractDiffusion: + + def __init__(self, p: Processing, sampler: Sampler): + self.method = self.__class__.__name__ + self.p: Processing = p + self.pbar = None + + # sampler + self.sampler_name = p.sampler_name + self.sampler_raw = sampler + self.sampler = sampler + + # fix. Kdiff 'AND' support and image editing model support + if self.is_kdiff and not hasattr(self, 'is_edit_model'): + self.is_edit_model = (shared.sd_model.cond_stage_key == "edit" # "txt" + and self.sampler.model_wrap_cfg.image_cfg_scale is not None + and self.sampler.model_wrap_cfg.image_cfg_scale != 1.0) + + # cache. final result of current sampling step, [B, C=4, H//8, W//8] + # avoiding overhead of creating new tensors and weight summing + self.x_buffer: Tensor = None + self.w: int = int(self.p.width // opt_f) # latent size + self.h: int = int(self.p.height // opt_f) + # weights for background & grid bboxes + self.weights: Tensor = torch.zeros((1, 1, self.h, self.w), device=devices.device, dtype=torch.float32) + + # FIXME: I'm trying to count the step correctly but it's not working + self.step_count = 0 + self.inner_loop_count = 0 + self.kdiff_step = -1 + + # ext. Grid tiling painting (grid bbox) + self.enable_grid_bbox: bool = False + self.tile_w: int = None + self.tile_h: int = None + self.tile_bs: int = None + self.num_tiles: int = None + self.num_batches: int = None + self.batched_bboxes: List[List[BBox]] = [] + + # ext. Region Prompt Control (custom bbox) + self.enable_custom_bbox: bool = False + self.custom_bboxes: List[CustomBBox] = [] + self.cond_basis: Cond = None + self.uncond_basis: Uncond = None + self.draw_background: bool = True # by default we draw major prompts in grid tiles + self.causal_layers: bool = None + + # ext. Noise Inversion (noise inversion) + self.noise_inverse_enabled: bool = False + self.noise_inverse_steps: int = 0 + self.noise_inverse_retouch: float = None + self.noise_inverse_renoise_strength: float = None + self.noise_inverse_renoise_kernel: int = None + self.noise_inverse_get_cache = None + self.noise_inverse_set_cache = None + self.sample_img2img_original = None + + # ext. ControlNet + self.enable_controlnet: bool = False + self.controlnet_script: ModuleType = None + self.control_tensor_batch: List[List[Tensor]] = [] + self.control_params: Dict[str, Tensor] = {} + self.control_tensor_cpu: bool = None + self.control_tensor_custom: List[List[Tensor]] = [] + + # ext. StableSR + self.enable_stablesr: bool = False + self.stablesr_script: ModuleType = None + self.stablesr_tensor: Tensor = None + self.stablesr_tensor_batch: List[Tensor] = [] + self.stablesr_tensor_custom: List[Tensor] = [] + + @property + def is_kdiff(self): + return isinstance(self.sampler_raw, KDiffusionSampler) + + @property + def is_ddim(self): + return isinstance(self.sampler_raw, CompVisSampler) + + def update_pbar(self): + if self.pbar.n >= self.pbar.total: + self.pbar.close() + else: + if self.step_count == state.sampling_step: + self.inner_loop_count += 1 + if self.inner_loop_count < self.total_bboxes: + self.pbar.update() + else: + self.step_count = state.sampling_step + self.inner_loop_count = 0 + + def reset_buffer(self, x_in:Tensor): + # Judge if the shape of x_in is the same as the shape of x_buffer + if self.x_buffer is None or self.x_buffer.shape != x_in.shape: + self.x_buffer = torch.zeros_like(x_in, device=x_in.device, dtype=x_in.dtype) + else: + self.x_buffer.zero_() + + def init_done(self): + ''' + Call this after all `init_*`, settings are done, now perform: + - settings sanity check + - pre-computations, cache init + - anything thing needed before denoising starts + ''' + + self.total_bboxes = 0 + if self.enable_grid_bbox: self.total_bboxes += self.num_batches + if self.enable_custom_bbox: self.total_bboxes += len(self.custom_bboxes) + assert self.total_bboxes > 0, "Nothing to paint! No background to draw and no custom bboxes were provided." + + self.pbar = tqdm(total=(self.total_bboxes) * state.sampling_steps, desc=f"{self.method} Sampling: ") + + ''' ↓↓↓ cond_dict utils ↓↓↓ ''' + + def _tcond_key(self, cond_dict:CondDict) -> str: + return 'crossattn' if 'crossattn' in cond_dict else 'c_crossattn' + + def get_tcond(self, cond_dict:CondDict) -> Tensor: + tcond = cond_dict[self._tcond_key(cond_dict)] + if isinstance(tcond, list): tcond = tcond[0] + return tcond + + def set_tcond(self, cond_dict:CondDict, tcond:Tensor): + key = self._tcond_key(cond_dict) + if isinstance(cond_dict[key], list): tcond = [tcond] + cond_dict[key] = tcond + + def _icond_key(self, cond_dict:CondDict) -> str: + return 'c_adm' if shared.sd_model.model.conditioning_key in ['crossattn-adm', 'adm'] else 'c_concat' + + def get_icond(self, cond_dict:CondDict) -> Tensor: + ''' icond differs for different models (inpaint/unclip model) ''' + key = self._icond_key(cond_dict) + icond = cond_dict[key] + if isinstance(icond, list): icond = icond[0] + return icond + + def set_icond(self, cond_dict:CondDict, icond:Tensor): + key = self._icond_key(cond_dict) + if isinstance(cond_dict[key], list): icond = [icond] + cond_dict[key] = icond + + def _vcond_key(self, cond_dict:CondDict) -> Optional[str]: + return 'vector' if 'vector' in cond_dict else None + + def get_vcond(self, cond_dict:CondDict) -> Optional[Tensor]: + ''' vector for SDXL ''' + key = self._vcond_key(cond_dict) + return cond_dict.get(key) + + def set_vcond(self, cond_dict:CondDict, vcond:Optional[Tensor]): + key = self._vcond_key(cond_dict) + if key is not None: + cond_dict[key] = vcond + + def make_cond_dict(self, cond_in:CondDict, tcond:Tensor, icond:Tensor, vcond:Tensor=None) -> CondDict: + ''' copy & replace the content, returns a new object ''' + cond_out = cond_in.copy() + self.set_tcond(cond_out, tcond) + self.set_icond(cond_out, icond) + self.set_vcond(cond_out, vcond) + return cond_out + + ''' ↓↓↓ extensive functionality ↓↓↓ ''' + + @grid_bbox + def init_grid_bbox(self, tile_w:int, tile_h:int, overlap:int, tile_bs:int): + self.enable_grid_bbox = True + + self.tile_w = min(tile_w, self.w) + self.tile_h = min(tile_h, self.h) + overlap = max(0, min(overlap, min(tile_w, tile_h) - 4)) + # split the latent into overlapped tiles, then batching + # weights basically indicate how many times a pixel is painted + bboxes, weights = split_bboxes(self.w, self.h, self.tile_w, self.tile_h, overlap, self.get_tile_weights()) + self.weights += weights + self.num_tiles = len(bboxes) + self.num_batches = math.ceil(self.num_tiles / tile_bs) + self.tile_bs = math.ceil(len(bboxes) / self.num_batches) # optimal_batch_size + self.batched_bboxes = [bboxes[i*self.tile_bs:(i+1)*self.tile_bs] for i in range(self.num_batches)] + + @grid_bbox + def get_tile_weights(self) -> Union[Tensor, float]: + return 1.0 + + + @custom_bbox + def init_custom_bbox(self, bbox_settings:Dict[int,BBoxSettings], draw_background:bool, causal_layers:bool): + self.enable_custom_bbox = True + + self.causal_layers = causal_layers + self.draw_background = draw_background + if not draw_background: + self.enable_grid_bbox = False + self.weights.zero_() + + self.custom_bboxes: List[CustomBBox] = [] + for bbox_setting in bbox_settings.values(): + e, x, y, w, h, p, n, blend_mode, feather_ratio, seed = bbox_setting + if not e or x > 1.0 or y > 1.0 or w <= 0.0 or h <= 0.0: continue + x = int(x * self.w) + y = int(y * self.h) + w = math.ceil(w * self.w) + h = math.ceil(h * self.h) + x = max(0, x) + y = max(0, y) + w = min(self.w - x, w) + h = min(self.h - y, h) + self.custom_bboxes.append(CustomBBox(x, y, w, h, p, n, blend_mode, feather_ratio, seed)) + + if len(self.custom_bboxes) == 0: + self.enable_custom_bbox = False + return + + # prepare cond + p = self.p + prompts = p.all_prompts[:p.batch_size] + neg_prompts = p.all_negative_prompts[:p.batch_size] + for bbox in self.custom_bboxes: + bbox.cond, bbox.extra_network_data = Condition.get_custom_cond(prompts, bbox.prompt, p.steps, p.styles) + bbox.uncond = Condition.get_uncond(Prompt.append_prompt(neg_prompts, bbox.neg_prompt), p.steps, p.styles) + self.cond_basis = Condition.get_cond(prompts, p.steps) + self.uncond_basis = Condition.get_uncond(neg_prompts, p.steps) + + @custom_bbox + def reconstruct_custom_cond(self, org_cond:CondDict, custom_cond:Cond, custom_uncond:Uncond, bbox:CustomBBox) -> Tuple[List, Tensor, Uncond, Tensor]: + image_conditioning = None + if isinstance(org_cond, dict): + icond = self.get_icond(org_cond) + if icond.shape[2:] == (self.h, self.w): # img2img + icond = icond[bbox.slicer] + image_conditioning = icond + + sampler_step = self.sampler.model_wrap_cfg.step + tensor = Condition.reconstruct_cond(custom_cond, sampler_step) + custom_uncond = Condition.reconstruct_uncond(custom_uncond, sampler_step) + return tensor, custom_uncond, image_conditioning + + @custom_bbox + def kdiff_custom_forward(self, x_tile:Tensor, sigma_in:Tensor, original_cond:CondDict, bbox_id:int, bbox:CustomBBox, forward_func:Callable) -> Tensor: + ''' + The inner kdiff noise prediction is usually batched. + We need to unwrap the inside loop to simulate the batched behavior. + This can be extremely tricky. + ''' + + sampler_step = self.sampler.model_wrap_cfg.step + if self.kdiff_step != sampler_step: + self.kdiff_step = sampler_step + self.kdiff_step_bbox = [-1 for _ in range(len(self.custom_bboxes))] + self.tensor = {} # {int: Tensor[cond]} + self.uncond = {} # {int: Tensor[cond]} + self.image_cond_in = {} + # Initialize global prompts just for estimate the behavior of kdiff + self.real_tensor = Condition.reconstruct_cond(self.cond_basis, sampler_step) + self.real_uncond = Condition.reconstruct_uncond(self.uncond_basis, sampler_step) + # reset the progress for all bboxes + self.a = [0 for _ in range(len(self.custom_bboxes))] + + if self.kdiff_step_bbox[bbox_id] != sampler_step: + # When a new step starts for a bbox, we need to judge whether the tensor is batched. + self.kdiff_step_bbox[bbox_id] = sampler_step + + tensor, uncond, image_cond_in = self.reconstruct_custom_cond(original_cond, bbox.cond, bbox.uncond, bbox) + + if self.real_tensor.shape[1] == self.real_uncond.shape[1]: + if shared.batch_cond_uncond: + # when the real tensor is with equal length, all information is contained in x_tile. + # we simulate the batched behavior and compute all the tensors in one go. + if tensor.shape[1] == uncond.shape[1]: + # When our prompt tensor is with equal length, we can directly their code. + if not self.is_edit_model: + cond = torch.cat([tensor, uncond]) + else: + cond = torch.cat([tensor, uncond, uncond]) + self.set_custom_controlnet_tensors(bbox_id, x_tile.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, cond, image_cond_in), + ) + else: + # When not, we need to pass the tensor to UNet separately. + x_out = torch.zeros_like(x_tile) + cond_size = tensor.shape[0] + self.set_custom_controlnet_tensors(bbox_id, cond_size) + self.set_custom_stablesr_tensors(bbox_id) + cond_out = forward_func( + x_tile [:cond_size], + sigma_in[:cond_size], + cond=self.make_cond_dict(original_cond, tensor, image_cond_in[:cond_size]), + ) + uncond_size = uncond.shape[0] + self.set_custom_controlnet_tensors(bbox_id, uncond_size) + self.set_custom_stablesr_tensors(bbox_id) + uncond_out = forward_func( + x_tile [cond_size:cond_size+uncond_size], + sigma_in[cond_size:cond_size+uncond_size], + cond=self.make_cond_dict(original_cond, uncond, image_cond_in[cond_size:cond_size+uncond_size]), + ) + x_out[:cond_size] = cond_out + x_out[cond_size:cond_size+uncond_size] = uncond_out + if self.is_edit_model: + x_out[cond_size+uncond_size:] = uncond_out + return x_out + + # otherwise, the x_tile is only a partial batch. + # We have to denoise in different runs. + # We store the prompt and neg_prompt tensors for current bbox + self.tensor[bbox_id] = tensor + self.uncond[bbox_id] = uncond + self.image_cond_in[bbox_id] = image_cond_in + + # Now we get current batch of prompt and neg_prompt tensors + tensor: Tensor = self.tensor[bbox_id] + uncond: Tensor = self.uncond[bbox_id] + batch_size = x_tile.shape[0] + # get the start and end index of the current batch + a = self.a[bbox_id] + b = a + batch_size + self.a[bbox_id] += batch_size + + if self.real_tensor.shape[1] == self.real_uncond.shape[1]: + # When use --lowvram or --medvram, kdiff will slice the cond and uncond with [a:b] + # So we need to slice our tensor and uncond with the same index as original kdiff. + + # --- original code in kdiff --- + # if not self.is_edit_model: + # cond = torch.cat([tensor, uncond]) + # else: + # cond = torch.cat([tensor, uncond, uncond]) + # cond = cond[a:b] + # ------------------------------ + + # The original kdiff code is to concat and then slice, but this cannot apply to + # our custom prompt tensor when tensor.shape[1] != uncond.shape[1]. So we adapt it. + cond_in, uncond_in = None, None + # Slice the [prompt, neg prompt, (possibly) neg prompt] with [a:b] + if not self.is_edit_model: + if b <= tensor.shape[0]: cond_in = tensor[a:b] + elif a >= tensor.shape[0]: cond_in = uncond[a-tensor.shape[0]:b-tensor.shape[0]] + else: + cond_in = tensor[a:] + uncond_in = uncond[:b-tensor.shape[0]] + else: + if b <= tensor.shape[0]: + cond_in = tensor[a:b] + elif b > tensor.shape[0] and b <= tensor.shape[0] + uncond.shape[0]: + if a>= tensor.shape[0]: + cond_in = uncond[a-tensor.shape[0]:b-tensor.shape[0]] + else: + cond_in = tensor[a:] + uncond_in = uncond[:b-tensor.shape[0]] + else: + if a >= tensor.shape[0] + uncond.shape[0]: + cond_in = uncond[a-tensor.shape[0]-uncond.shape[0]:b-tensor.shape[0]-uncond.shape[0]] + elif a >= tensor.shape[0]: + cond_in = torch.cat([uncond[a-tensor.shape[0]:], uncond[:b-tensor.shape[0]-uncond.shape[0]]]) + + if uncond_in is None or tensor.shape[1] == uncond.shape[1]: + # If the tensor can be passed to UNet in one go, do it. + if uncond_in is not None: + cond_in = torch.cat([cond_in, uncond_in]) + self.set_custom_controlnet_tensors(bbox_id, x_tile.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, cond_in, self.image_cond_in[bbox_id]), + ) + else: + # If not, we need to pass the tensor to UNet separately. + x_out = torch.zeros_like(x_tile) + cond_size = cond_in.shape[0] + self.set_custom_controlnet_tensors(bbox_id, cond_size) + self.set_custom_stablesr_tensors(bbox_id) + cond_out = forward_func( + x_tile [:cond_size], + sigma_in[:cond_size], + cond=self.make_cond_dict(original_cond, cond_in, self.image_cond_in[bbox_id]) + ) + self.set_custom_controlnet_tensors(bbox_id, uncond_in.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + uncond_out = forward_func( + x_tile [cond_size:], + sigma_in[cond_size:], + cond=self.make_cond_dict(original_cond, uncond_in, self.image_cond_in[bbox_id]) + ) + x_out[:cond_size] = cond_out + x_out[cond_size:] = uncond_out + return x_out + + # If the original prompt is with different length, + # kdiff will deal with the cond and uncond separately. + # Hence we also deal with the tensor and uncond separately. + # get the start and end index of the current batch + + if a < tensor.shape[0]: + # Deal with custom prompt tensor + if not self.is_edit_model: + c_crossattn = tensor[a:b] + else: + c_crossattn = torch.cat([tensor[a:b]], uncond) + self.set_custom_controlnet_tensors(bbox_id, x_tile.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + # complete this batch. + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, c_crossattn, self.image_cond_in[bbox_id]) + ) + else: + # if the cond is finished, we need to process the uncond. + self.set_custom_controlnet_tensors(bbox_id, uncond.shape[0]) + self.set_custom_stablesr_tensors(bbox_id) + return forward_func( + x_tile, + sigma_in, + cond=self.make_cond_dict(original_cond, uncond, self.image_cond_in[bbox_id]) + ) + + @custom_bbox + def ddim_custom_forward(self, x:Tensor, cond_in:CondDict, bbox:CustomBBox, ts:Tensor, forward_func:Callable, *args, **kwargs) -> Tensor: + ''' draw custom bbox ''' + + tensor, uncond, image_conditioning = self.reconstruct_custom_cond(cond_in, bbox.cond, bbox.uncond, bbox) + + cond = tensor + # for DDIM, shapes definitely match. So we dont need to do the same thing as in the KDIFF sampler. + if uncond.shape[1] < cond.shape[1]: + last_vector = uncond[:, -1:] + last_vector_repeated = last_vector.repeat([1, cond.shape[1] - uncond.shape[1], 1]) + uncond = torch.hstack([uncond, last_vector_repeated]) + elif uncond.shape[1] > cond.shape[1]: + uncond = uncond[:, :cond.shape[1]] + + # Wrap the image conditioning back up since the DDIM code can accept the dict directly. + # Note that they need to be lists because it just concatenates them later. + if image_conditioning is not None: + cond = self.make_cond_dict(cond_in, cond, image_conditioning) + uncond = self.make_cond_dict(cond_in, uncond, image_conditioning) + + # We cannot determine the batch size here for different methods, so delay it to the forward_func. + return forward_func(x, cond, ts, unconditional_conditioning=uncond, *args, **kwargs) + + + @controlnet + def init_controlnet(self, controlnet_script:ModuleType, control_tensor_cpu:bool): + self.enable_controlnet = True + + self.controlnet_script = controlnet_script + self.control_tensor_cpu = control_tensor_cpu + self.control_tensor_batch = None + self.control_params = None + self.control_tensor_custom = [] + + self.prepare_controlnet_tensors() + + @controlnet + def reset_controlnet_tensors(self): + if not self.enable_controlnet: return + if self.control_tensor_batch is None: return + + for param_id in range(len(self.control_params)): + self.control_params[param_id].hint_cond = self.org_control_tensor_batch[param_id] + + @controlnet + def prepare_controlnet_tensors(self, refresh:bool=False): + ''' Crop the control tensor into tiles and cache them ''' + + if not refresh: + if self.control_tensor_batch is not None or self.control_params is not None: return + + if not self.enable_controlnet or self.controlnet_script is None: return + + latest_network = self.controlnet_script.latest_network + if latest_network is None or not hasattr(latest_network, 'control_params'): return + + self.control_params = latest_network.control_params + tensors = [param.hint_cond for param in latest_network.control_params] + self.org_control_tensor_batch = tensors + + if len(tensors) == 0: return + + self.control_tensor_batch = [] + for i in range(len(tensors)): + control_tile_list = [] + control_tensor = tensors[i] + for bboxes in self.batched_bboxes: + single_batch_tensors = [] + for bbox in bboxes: + if len(control_tensor.shape) == 3: + control_tensor.unsqueeze_(0) + control_tile = control_tensor[:, :, bbox[1]*opt_f:bbox[3]*opt_f, bbox[0]*opt_f:bbox[2]*opt_f] + single_batch_tensors.append(control_tile) + control_tile = torch.cat(single_batch_tensors, dim=0) + if self.control_tensor_cpu: + control_tile = control_tile.cpu() + control_tile_list.append(control_tile) + self.control_tensor_batch.append(control_tile_list) + + if len(self.custom_bboxes) > 0: + custom_control_tile_list = [] + for bbox in self.custom_bboxes: + if len(control_tensor.shape) == 3: + control_tensor.unsqueeze_(0) + control_tile = control_tensor[:, :, bbox[1]*opt_f:bbox[3]*opt_f, bbox[0]*opt_f:bbox[2]*opt_f] + if self.control_tensor_cpu: + control_tile = control_tile.cpu() + custom_control_tile_list.append(control_tile) + self.control_tensor_custom.append(custom_control_tile_list) + + @controlnet + def switch_controlnet_tensors(self, batch_id:int, x_batch_size:int, tile_batch_size:int, is_denoise=False): + if not self.enable_controlnet: return + if self.control_tensor_batch is None: return + + for param_id in range(len(self.control_params)): + control_tile = self.control_tensor_batch[param_id][batch_id] + if self.is_kdiff: + all_control_tile = [] + for i in range(tile_batch_size): + this_control_tile = [control_tile[i].unsqueeze(0)] * x_batch_size + all_control_tile.append(torch.cat(this_control_tile, dim=0)) + control_tile = torch.cat(all_control_tile, dim=0) + else: + control_tile = control_tile.repeat([x_batch_size if is_denoise else x_batch_size * 2, 1, 1, 1]) + self.control_params[param_id].hint_cond = control_tile.to(devices.device) + + @controlnet + def set_custom_controlnet_tensors(self, bbox_id:int, repeat_size:int): + if not self.enable_controlnet: return + if not len(self.control_tensor_custom): return + + for param_id in range(len(self.control_params)): + control_tensor = self.control_tensor_custom[param_id][bbox_id].to(devices.device) + self.control_params[param_id].hint_cond = control_tensor.repeat((repeat_size, 1, 1, 1)) + + + @stablesr + def init_stablesr(self, stablesr_script:ModuleType): + if stablesr_script.stablesr_model is None: return + self.stablesr_script = stablesr_script + def set_image_hook(latent_image): + self.enable_stablesr = True + self.stablesr_tensor = latent_image + self.stablesr_tensor_batch = [] + for bboxes in self.batched_bboxes: + single_batch_tensors = [] + for bbox in bboxes: + stablesr_tile = self.stablesr_tensor[:, :, bbox[1]:bbox[3], bbox[0]:bbox[2]] + single_batch_tensors.append(stablesr_tile) + stablesr_tile = torch.cat(single_batch_tensors, dim=0) + self.stablesr_tensor_batch.append(stablesr_tile) + if len(self.custom_bboxes) > 0: + self.stablesr_tensor_custom = [] + for bbox in self.custom_bboxes: + stablesr_tile = self.stablesr_tensor[:, :, bbox[1]:bbox[3], bbox[0]:bbox[2]] + self.stablesr_tensor_custom.append(stablesr_tile) + + stablesr_script.stablesr_model.set_image_hooks['TiledDiffusion'] = set_image_hook + + @stablesr + def reset_stablesr_tensors(self): + if not self.enable_stablesr: return + if self.stablesr_script.stablesr_model is None: return + self.stablesr_script.stablesr_model.latent_image = self.stablesr_tensor + + @stablesr + def switch_stablesr_tensors(self, batch_id:int): + if not self.enable_stablesr: return + if self.stablesr_script.stablesr_model is None: return + if self.stablesr_tensor_batch is None: return + self.stablesr_script.stablesr_model.latent_image = self.stablesr_tensor_batch[batch_id] + + @stablesr + def set_custom_stablesr_tensors(self, bbox_id:int): + if not self.enable_stablesr: return + if self.stablesr_script.stablesr_model is None: return + if not len(self.stablesr_tensor_custom): return + self.stablesr_script.stablesr_model.latent_image = self.stablesr_tensor_custom[bbox_id] + + + @noise_inverse + def init_noise_inverse(self, steps:int, retouch:float, get_cache_callback, set_cache_callback, renoise_strength:float, renoise_kernel:int): + self.noise_inverse_enabled = True + self.noise_inverse_steps = steps + self.noise_inverse_retouch = float(retouch) + self.noise_inverse_renoise_strength = float(renoise_strength) + self.noise_inverse_renoise_kernel = int(renoise_kernel) + if self.sample_img2img_original is None: + self.sample_img2img_original = self.sampler_raw.sample_img2img + self.sampler_raw.sample_img2img = MethodType(self.sample_img2img, self.sampler_raw) + self.noise_inverse_set_cache = set_cache_callback + self.noise_inverse_get_cache = get_cache_callback + + @noise_inverse + @keep_signature + def sample_img2img(self, sampler: KDiffusionSampler, p:ProcessingImg2Img, + x:Tensor, noise:Tensor, conditioning, unconditional_conditioning, + steps=None, image_conditioning=None): + # noise inverse sampling - renoise mask + import torch.nn.functional as F + renoise_mask = None + if self.noise_inverse_renoise_strength > 0: + image = p.init_images[0] + # convert to grayscale with PIL + image = image.convert('L') + np_mask = get_retouch_mask(np.asarray(image), self.noise_inverse_renoise_kernel) + renoise_mask = torch.from_numpy(np_mask).to(noise.device) + # resize retouch mask to match noise size + renoise_mask = 1 - F.interpolate(renoise_mask.unsqueeze(0).unsqueeze(0), size=noise.shape[-2:], mode='bilinear').squeeze(0).squeeze(0) + renoise_mask *= self.noise_inverse_renoise_strength + renoise_mask = torch.clamp(renoise_mask, 0, 1) + + prompts = p.all_prompts[:p.batch_size] + + latent = None + # try to use cached latent to save huge amount of time. + cached_latent: NoiseInverseCache = self.noise_inverse_get_cache() + if cached_latent is not None and \ + cached_latent.model_hash == p.sd_model.sd_model_hash and \ + cached_latent.noise_inversion_steps == self.noise_inverse_steps and \ + len(cached_latent.prompts) == len(prompts) and \ + all([cached_latent.prompts[i] == prompts[i] for i in range(len(prompts))]) and \ + abs(cached_latent.retouch - self.noise_inverse_retouch) < 0.01 and \ + cached_latent.x0.shape == p.init_latent.shape and \ + torch.abs(cached_latent.x0.to(p.init_latent.device) - p.init_latent).sum() < 100: # the 100 is an arbitrary threshold copy-pasted from the img2img alt code + # use cached noise + print('[Tiled Diffusion] Your checkpoint, image, prompts, inverse steps, and retouch params are all unchanged.') + print('[Tiled Diffusion] Noise Inversion will use the cached noise from the previous run. To clear the cache, click the Free GPU button.') + latent = cached_latent.xt.to(noise.device) + if latent is None: + # run noise inversion + shared.state.job_count += 1 + latent = self.find_noise_for_image_sigma_adjustment(sampler.model_wrap, self.noise_inverse_steps, prompts) + shared.state.nextjob() + self.noise_inverse_set_cache(p.init_latent.clone().cpu(), latent.clone().cpu(), prompts) + # The cache is only 1 latent image and is very small (16 MB for 8192 * 8192 image), so we don't need to worry about memory leakage. + + # calculate sampling steps + adjusted_steps, _ = sd_samplers_common.setup_img2img_steps(p, steps) + sigmas = sampler.get_sigmas(p, adjusted_steps) + inverse_noise = latent - (p.init_latent / sigmas[0]) + + # inject noise to high-frequency area so that the details won't lose too much + if renoise_mask is not None: + # If the background is not drawn, we need to filter out the un-drawn pixels and reweight foreground with feather mask + # This is to enable the renoise mask in regional inpainting + if not self.enable_grid_bbox: + background_count = torch.zeros((1, 1, noise.shape[2], noise.shape[3]), device=noise.device) + foreground_noise = torch.zeros_like(noise) + foreground_weight = torch.zeros((1, 1, noise.shape[2], noise.shape[3]), device=noise.device) + foreground_count = torch.zeros((1, 1, noise.shape[2], noise.shape[3]), device=noise.device) + for bbox in self.custom_bboxes: + if bbox.blend_mode == BlendMode.BACKGROUND: + background_count[bbox.slicer] += 1 + elif bbox.blend_mode == BlendMode.FOREGROUND: + foreground_noise [bbox.slicer] += noise[bbox.slicer] + foreground_weight[bbox.slicer] += bbox.feather_mask + foreground_count [bbox.slicer] += 1 + background_noise = torch.where(background_count > 0, noise, 0) + foreground_noise = torch.where(foreground_count > 0, foreground_noise / foreground_count, 0) + foreground_weight = torch.where(foreground_count > 0, foreground_weight / foreground_count, 0) + noise = background_noise * (1 - foreground_weight) + foreground_noise * foreground_weight + del background_noise, foreground_noise, foreground_weight, background_count, foreground_count + combined_noise = ((1 - renoise_mask) * inverse_noise + renoise_mask * noise) / ((renoise_mask**2 + (1 - renoise_mask)**2) ** 0.5) + else: + combined_noise = inverse_noise + + # use the estimated noise for the original img2img sampling + return self.sample_img2img_original(p, x, combined_noise, conditioning, unconditional_conditioning, steps, image_conditioning) + + @noise_inverse + @torch.no_grad() + def find_noise_for_image_sigma_adjustment(self, dnw, steps, prompts:List[str]) -> Tensor: + ''' + Migrate from the built-in script img2imgalt.py + Tiled noise inverse for better image upscaling + ''' + import k_diffusion as K + assert self.p.sampler_name == 'Euler' + + x = self.p.init_latent + s_in = x.new_ones([x.shape[0]]) + skip = 1 if shared.sd_model.parameterization == "v" else 0 + sigmas = dnw.get_sigmas(steps).flip(0) + + cond = self.p.sd_model.get_learned_conditioning(prompts) + if isinstance(cond, Tensor): # SD1/SD2 + cond_dict_dummy = { + 'c_crossattn': [], # List[Tensor] + 'c_concat': [], # List[Tensor] + } + cond_in = self.make_cond_dict(cond_dict_dummy, cond, self.p.image_conditioning) + else: # SDXL + cond_dict_dummy = { + 'crossattn': None, # Tensor + 'vector': None, # Tensor + 'c_concat': [], # List[Tensor] + } + cond_in = self.make_cond_dict(cond_dict_dummy, cond['crossattn'], self.p.image_conditioning, cond['vector']) + + state.sampling_steps = steps + pbar = tqdm(total=steps, desc='Noise Inversion') + for i in range(1, len(sigmas)): + if state.interrupted: return x + + state.sampling_step += 1 + + x_in = x + sigma_in = torch.cat([sigmas[i] * s_in]) + c_out, c_in = [K.utils.append_dims(k, x_in.ndim) for k in dnw.get_scalings(sigma_in)[skip:]] + + t = dnw.sigma_to_t(sigma_in) + t = t / self.noise_inverse_retouch + + eps = self.get_noise(x_in * c_in, t, cond_in, steps - i) + denoised = x_in + eps * c_out + + # Euler method: + d = (x - denoised) / sigmas[i] + dt = sigmas[i] - sigmas[i - 1] + x = x + d * dt + + sd_samplers_common.store_latent(x) + + # This is neccessary to save memory before the next iteration + del x_in, sigma_in, c_out, c_in, t, + del eps, denoised, d, dt + + pbar.update(1) + pbar.close() + + return x / sigmas[-1] + + @noise_inverse + @torch.no_grad() + def get_noise(self, x_in: Tensor, sigma_in:Tensor, cond_in:Dict[str, Tensor], step:int) -> Tensor: + raise NotImplementedError diff --git a/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/demofusion.py b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/demofusion.py new file mode 100644 index 0000000000000000000000000000000000000000..758ccfe0d13c6e92b878660a475905cf325a29fd --- /dev/null +++ b/extensions/multidiffusion-upscaler-for-automatic1111/tile_methods/demofusion.py @@ -0,0 +1,353 @@ +from tile_methods.abstractdiffusion import AbstractDiffusion +from tile_utils.utils import * +import torch.nn.functional as F +import random +from copy import deepcopy +import inspect +from modules import sd_samplers_common + + +class DemoFusion(AbstractDiffusion): + """ + DemoFusion Implementation + https://arxiv.org/abs/2311.16973 + """ + + def __init__(self, p:Processing, *args, **kwargs): + super().__init__(p, *args, **kwargs) + assert p.sampler_name != 'UniPC', 'Demofusion is not compatible with UniPC!' + + + def hook(self): + steps, self.t_enc = sd_samplers_common.setup_img2img_steps(self.p, None) + + self.sampler.model_wrap_cfg.forward_ori = self.sampler.model_wrap_cfg.forward + self.sampler_forward = self.sampler.model_wrap_cfg.inner_model.forward + self.sampler.model_wrap_cfg.forward = self.forward_one_step + if self.is_kdiff: + self.sampler: KDiffusionSampler + self.sampler.model_wrap_cfg: CFGDenoiserKDiffusion + self.sampler.model_wrap_cfg.inner_model: Union[CompVisDenoiser, CompVisVDenoiser] + else: + self.sampler: CompVisSampler + self.sampler.model_wrap_cfg: CFGDenoiserTimesteps + self.sampler.model_wrap_cfg.inner_model: Union[CompVisTimestepsDenoiser, CompVisTimestepsVDenoiser] + self.timesteps = self.sampler.get_timesteps(self.p, steps) + + @staticmethod + def unhook(): + if hasattr(shared.sd_model, 'apply_model_ori'): + shared.sd_model.apply_model = shared.sd_model.apply_model_ori + del shared.sd_model.apply_model_ori + + def reset_buffer(self, x_in:Tensor): + super().reset_buffer(x_in) + + + + def repeat_tensor(self, x:Tensor, n:int) -> Tensor: + ''' repeat the tensor on it's first dim ''' + if n == 1: return x + B = x.shape[0] + r_dims = len(x.shape) - 1 + if B == 1: # batch_size = 1 (not `tile_batch_size`) + shape = [n] + [-1] * r_dims # [N, -1, ...] + return x.expand(shape) # `expand` is much lighter than `tile` + else: + shape = [n] + [1] * r_dims # [N, 1, ...] + return x.repeat(shape) + + def repeat_cond_dict(self, cond_in:CondDict, bboxes,mode) -> CondDict: + ''' repeat all tensors in cond_dict on it's first dim (for a batch of tiles), returns a new object ''' + # n_repeat + n_rep = len(bboxes) + # txt cond + tcond = self.get_tcond(cond_in) # [B=1, L, D] => [B*N, L, D] + tcond = self.repeat_tensor(tcond, n_rep) + # img cond + icond = self.get_icond(cond_in) + if icond.shape[2:] == (self.h, self.w): # img2img, [B=1, C, H, W] + if mode == 0: + if self.p.random_jitter: + jitter_range = self.jitter_range + icond = F.pad(icond,(jitter_range, jitter_range, jitter_range, jitter_range),'constant',value=0) + icond = torch.cat([icond[bbox.slicer] for bbox in bboxes], dim=0) + else: + icond = torch.cat([icond[:,:,bbox[1]::self.p.current_scale_num,bbox[0]::self.p.current_scale_num] for bbox in bboxes], dim=0) + else: # txt2img, [B=1, C=5, H=1, W=1] + icond = self.repeat_tensor(icond, n_rep) + + # vec cond (SDXL) + vcond = self.get_vcond(cond_in) # [B=1, D] + if vcond is not None: + vcond = self.repeat_tensor(vcond, n_rep) # [B*N, D] + return self.make_cond_dict(cond_in, tcond, icond, vcond) + + + def global_split_bboxes(self): + cols = self.p.current_scale_num + rows = cols + + bbox_list = [] + for row in range(rows): + y = row + for col in range(cols): + x = col + bbox = (x, y) + bbox_list.append(bbox) + + return bbox_list+bbox_list if self.p.mixture else bbox_list + + def split_bboxes_jitter(self,w_l:int, h_l:int, tile_w:int, tile_h:int, overlap:int=16, init_weight:Union[Tensor, float]=1.0) -> Tuple[List[BBox], Tensor]: + cols = math.ceil((w_l - overlap) / (tile_w - overlap)) + rows = math.ceil((h_l - overlap) / (tile_h - overlap)) + if rows==0: + rows=1 + if cols == 0: + cols=1 + dx = (w_l - tile_w) / (cols - 1) if cols > 1 else 0 + dy = (h_l - tile_h) / (rows - 1) if rows > 1 else 0 + bbox_list: List[BBox] = [] + self.jitter_range = 0 + for row in range(rows): + for col in range(cols): + h = min(int(row * dy), h_l - tile_h) + w = min(int(col * dx), w_l - tile_w) + if self.p.random_jitter: + self.jitter_range = min(max((min(self.w, self.h)-self.stride)//4,0),min(int(self.window_size/2),int(self.overlap/2))) + jitter_range = self.jitter_range + w_jitter = 0 + h_jitter = 0 + if (w != 0) and (w+tile_w != w_l): + w_jitter = random.randint(-jitter_range, jitter_range) + elif (w == 0) and (w + tile_w != w_l): + w_jitter = random.randint(-jitter_range, 0) + elif (w != 0) and (w + tile_w == w_l): + w_jitter = random.randint(0, jitter_range) + if (h != 0) and (h + tile_h != h_l): + h_jitter = random.randint(-jitter_range, jitter_range) + elif (h == 0) and (h + tile_h != h_l): + h_jitter = random.randint(-jitter_range, 0) + elif (h != 0) and (h + tile_h == h_l): + h_jitter = random.randint(0, jitter_range) + h +=(h_jitter + jitter_range) + w += (w_jitter + jitter_range) + + bbox = BBox(w, h, tile_w, tile_h) + bbox_list.append(bbox) + return bbox_list, None + + @grid_bbox + def get_views(self, overlap:int, tile_bs:int,tile_bs_g:int): + self.enable_grid_bbox = True + self.tile_w = self.window_size + self.tile_h = self.window_size + + self.overlap = max(0, min(overlap, self.window_size - 4)) + + self.stride = max(4,self.window_size - self.overlap) + + # split the latent into overlapped tiles, then batching + # weights basically indicate how many times a pixel is painted + bboxes, _ = self.split_bboxes_jitter(self.w, self.h, self.tile_w, self.tile_h, self.overlap, self.get_tile_weights()) + self.num_tiles = len(bboxes) + self.num_batches = math.ceil(self.num_tiles / tile_bs) + self.tile_bs = math.ceil(len(bboxes) / self.num_batches) # optimal_batch_size + self.batched_bboxes = [bboxes[i*self.tile_bs:(i+1)*self.tile_bs] for i in range(self.num_batches)] + + global_bboxes = self.global_split_bboxes() + self.global_num_tiles = len(global_bboxes) + self.global_num_batches = math.ceil(self.global_num_tiles / tile_bs_g) + self.global_tile_bs = math.ceil(len(global_bboxes) / self.global_num_batches) + self.global_batched_bboxes = [global_bboxes[i*self.global_tile_bs:(i+1)*self.global_tile_bs] for i in range(self.global_num_batches)] + + def gaussian_kernel(self,kernel_size=3, sigma=1.0, channels=3): + x_coord = torch.arange(kernel_size, device=devices.device) + gaussian_1d = torch.exp(-(x_coord - (kernel_size - 1) / 2) ** 2 / (2 * sigma ** 2)) + gaussian_1d = gaussian_1d / gaussian_1d.sum() + gaussian_2d = gaussian_1d[:, None] * gaussian_1d[None, :] + kernel = gaussian_2d[None, None, :, :].repeat(channels, 1, 1, 1) + + return kernel + + def gaussian_filter(self,latents, kernel_size=3, sigma=1.0): + channels = latents.shape[1] + kernel = self.gaussian_kernel(kernel_size, sigma, channels).to(latents.device, latents.dtype) + blurred_latents = F.conv2d(latents, kernel, padding=kernel_size//2, groups=channels) + + return blurred_latents + + + + ''' ↓↓↓ kernel hijacks ↓↓↓ ''' + @torch.no_grad() + @keep_signature + def forward_one_step(self, x_in, sigma, **kwarg): + if self.is_kdiff: + x_noisy = self.p.x + self.p.noise * sigma[0] + else: + alphas_cumprod = self.p.sd_model.alphas_cumprod + sqrt_alpha_cumprod = torch.sqrt(alphas_cumprod[self.timesteps[self.t_enc-self.p.current_step]]) + sqrt_one_minus_alpha_cumprod = torch.sqrt(1 - alphas_cumprod[self.timesteps[self.t_enc-self.p.current_step]]) + x_noisy = self.p.x*sqrt_alpha_cumprod + self.p.noise * sqrt_one_minus_alpha_cumprod + + self.cosine_factor = 0.5 * (1 + torch.cos(torch.pi *torch.tensor(((self.p.current_step + 1) / (self.t_enc+1))))) + + c1 = self.cosine_factor ** self.p.cosine_scale_1 + + x_in = x_in*(1 - c1) + x_noisy * c1 + + if self.p.random_jitter: + jitter_range = self.jitter_range + else: + jitter_range = 0 + x_in_ = F.pad(x_in,(jitter_range, jitter_range, jitter_range, jitter_range),'constant',value=0) + _,_,H,W = x_in.shape + + self.sampler.model_wrap_cfg.inner_model.forward = self.sample_one_step + self.repeat_3 = False + + x_out = self.sampler.model_wrap_cfg.forward_ori(x_in_,sigma, **kwarg) + self.sampler.model_wrap_cfg.inner_model.forward = self.sampler_forward + x_out = x_out[:,:,jitter_range:jitter_range+H,jitter_range:jitter_range+W] + + return x_out + + + @torch.no_grad() + @keep_signature + def sample_one_step(self, x_in, sigma, cond): + assert LatentDiffusion.apply_model + def repeat_func_1(x_tile:Tensor, bboxes,mode=0) -> Tensor: + sigma_tile = self.repeat_tensor(sigma, len(bboxes)) + cond_tile = self.repeat_cond_dict(cond, bboxes,mode) + return self.sampler_forward(x_tile, sigma_tile, cond=cond_tile) + + def repeat_func_2(x_tile:Tensor, bboxes,mode=0) -> Tuple[Tensor, Tensor]: + n_rep = len(bboxes) + ts_tile = self.repeat_tensor(sigma, n_rep) + if isinstance(cond, dict): # FIXME: when will enter this branch? + cond_tile = self.repeat_cond_dict(cond, bboxes,mode) + else: + cond_tile = self.repeat_tensor(cond, n_rep) + return self.sampler_forward(x_tile, ts_tile, cond=cond_tile) + + def repeat_func_3(x_tile:Tensor, bboxes,mode=0): + sigma_in_tile = sigma.repeat(len(bboxes)) + cond_out = self.repeat_cond_dict(cond, bboxes,mode) + x_tile_out = shared.sd_model.apply_model(x_tile, sigma_in_tile, cond=cond_out) + return x_tile_out + + if self.repeat_3: + repeat_func = repeat_func_3 + self.repeat_3 = False + elif self.is_kdiff: + repeat_func = repeat_func_1 + else: + repeat_func = repeat_func_2 + N,_,_,_ = x_in.shape + + + self.x_buffer = torch.zeros_like(x_in) + self.weights = torch.zeros_like(x_in) + + for batch_id, bboxes in enumerate(self.batched_bboxes): + if state.interrupted: return x_in + x_tile = torch.cat([x_in[bbox.slicer] for bbox in bboxes], dim=0) + x_tile_out = repeat_func(x_tile, bboxes) + # de-batching + for i, bbox in enumerate(bboxes): + self.x_buffer[bbox.slicer] += x_tile_out[i*N:(i+1)*N, :, :, :] + self.weights[bbox.slicer] += 1 + self.weights = torch.where(self.weights == 0, torch.tensor(1), self.weights) #Prevent NaN from appearing in random_jitter mode + + x_local = self.x_buffer/self.weights + + self.x_buffer = torch.zeros_like(self.x_buffer) + self.weights = torch.zeros_like(self.weights) + + std_, mean_ = x_in.std(), x_in.mean() + c3 = 0.99 * self.cosine_factor ** self.p.cosine_scale_3 + 1e-2 + if self.p.gaussian_filter: + x_in_g = self.gaussian_filter(x_in, kernel_size=(2*self.p.current_scale_num-1), sigma=self.sig*c3) + x_in_g = (x_in_g - x_in_g.mean()) / x_in_g.std() * std_ + mean_ + + if not hasattr(self.p.sd_model, 'apply_model_ori'): + self.p.sd_model.apply_model_ori = self.p.sd_model.apply_model + self.p.sd_model.apply_model = self.apply_model_hijack + x_global = torch.zeros_like(x_local) + jitter_range = self.jitter_range + end = x_global.shape[3]-jitter_range + + current_num = 0 + if self.p.mixture: + for batch_id, bboxes in enumerate(self.global_batched_bboxes): + current_num += len(bboxes) + if current_num > (self.global_num_tiles//2) and (current_num-self.global_tile_bs) < (self.global_num_tiles//2): + res = len(bboxes) - (current_num - self.global_num_tiles//2) + x_in_i = torch.cat([x_in[:,:,bbox[1]+jitter_range:end:self.p.current_scale_num,bbox[0]+jitter_range:end:self.p.current_scale_num] if idxFeatures 🚀
+Browse all models from CivitAI 🧩
+ +* Explore a wide range of models at your fingertips. + +Check for updates and installed models 🔄
+ +* Easily spot new updates and identify already installed models while browsing. +* Ability to scan all installed models for available updates. + +Download any Model, any version, and any file 📥
+ +* Get the specific model version and file you need hassle-free. +* Download queue to avoid waiting for finished downloads. + +Automatically assign tags to installed models 🏷️
+ +* Assign tags by scanning all installed models for automatic use in image generation. + +Quick Model Info Access 📊
+ +* A button for each model card in txt2img and img2img to load it into the extension. +* A button under each image in model info to send its generation info to txt2img. + +High-speed downloads with Aria2 🚄
+ +* Maximize your bandwidth for lightning-fast downloads. + +Sleek and Intuitive User Interface 🖌️
+ +* Enjoy a clutter-free, user-friendly interface, designed to enhance your experience. + +Actively maintained with feature requests welcome 🛠️
+ +* Feel free to send me your feature requests, and I'll do my best to implement them! + + + +Known Issues 🐛
+
+Unable to download / Frozen download:
+ +**If you're experiencing issues with broken or frozen downloads, there are two possible solutions you can try:** + +1. **Revert to the old download method**: + A solution could be to disable the "Download models using Aria2" feature. +This will switch back to the old download method, which may resolve the issue. + +  + +2. **Disable Async DNS for Aria2**: + If you're using a DNS manager program like PortMaster, try turning on the "Disable Async DNS for Aria2" option. + +  + +These settings can be found under the "Settings" tab in Web-UI and then under the "CivitAI Browser+" tile. + +Automatic Installation:
+ + + + +Manual Installation:
+ +1. Download the latest version from this site and unpack the .zip + + +2. Navigate to your extensions folder (Your SD folder/webui/extensions) +3. Place the unpacked folder inside the extensions folder +4. Restart SD-WebUI + +# Preview 👀 + +https://github.com/BlafKing/sd-civitai-browser-plus/assets/9644716/44c5c7a0-4854-4043-bfbb-f32fa9df5a74 + + +# Star History 🌟 + + +v3.5.4
+ +* Feature: Added support for DoRA (Requires SD-WebUI v1.9) +* Bug fix: No longer rescans models that were previously not found on CivitAI +* Bug fix: Fixed placement of HTML & api_info files when custom images location was used. +* Bug fix: Fixed incorrect json naming. + +--- +v3.5.3
+ +* New Setting: Send model from the cards CivitAI button to the browser, instead of showing a popup. +* Bug fix: No longer fetch HTML info when the file already exists and overwrite is off. +* Bug fix: Fix NSFW models update functions. +* Bug fix: Fixed CivitAI button on NSFW model cards. + +--- +v3.5.2
+ +* Bug fix: NSFW filtering fixed. + +--- +v3.5.1
+ +* Temp fix: Quick fix for the new NSFW system. + - NSFW models may be returned when NSFW is disabled, this is an issue with the public CivitAI API. + - Search results currently do not get influenced by the NSFW setting, also an issue with the API. +* Bug fix: Better automatic coloring for white theme. + +--- +v3.5.0
+ +* Bug fix: Extension now works again with the latest CivitAI API version! +* Cleanup: Re-wrote backend API handling code. + +--- +v3.4.3
+ +* Bug fix: Hotfix for a change in the public API which broke searching. +* Bug fix: Fixed incorrect permission display on model page. + +--- +v3.4.2
+ +* Feature: Ability to set-up a custom proxy for API requests and downloads. +* Feature: Use image API for prompt info, should speed up loading. +* Feature: Optimized javascript code, improved webpage speed for some users. +* New setting: Proxy settings to set-up custom proxy. +* New setting: Toggle for saving description to model json file. (this displays description on the cards) +* Bug fix: Broken default sub folder option fixed [#217](https://github.com/BlafKing/sd-civitai-browser-plus/issues/217) + +--- +v3.4.1
+ +* Feature: Local images now work in HTML files as preview. (credit: [mx](https://github.com/mx)) +* Feature: Updated available base models. +* Bug fix: Fixed prompt info and model selection after CivitAI API update. +* Bug fix: Fixed "/" missing from default path/sub-folder. + +--- +v3.4.0
+ +* Feature: (BETA) Download queue! rearrange download order and remove models from queue + - Will likely contain bugs, still not completely finished. +* Feature: Customizable sub folder insertion options, choose what sub folder options you want! +* New setting: Toggle per prompt example image buttons +* New setting: Insert sub folder options +* Bug fix: Add to queue fixed, now properly gets enabled. +* Bug fix: Symlinks now get correctly recognized and used. +* Bug fix: No longer creates accidental sub folder when bulk downloading. + +--- +v3.3.1
+ +* Feature: Ability to send individual parts of image generation data to txt2img. +* Feature: Added compatibility for [stable-diffusion-webui-forge](https://github.com/lllyasviel/stable-diffusion-webui-forge) fork. +* New setting: Use local images in the HTML + - Does not work in combination with the "Use local HTML file for model info" option! +* New setting: Store the HTML and api_info in the custom images location +* Bug fix: New HTML model info now scales with width so it should always fit. +* Bug fix: Various bug fixes to the "Update model info & tags" function. +* Bug fix: Auto save all images now uses correctly uses custom image path if set. +* Bug fix: "Save model info" button should no longer return errors. +* Bug fix: Old download method (non Aria2) should now work again. + +--- +v3.3.0
+ +* Feature: New txt2img and img2img model info overlay on CivitAI button press. +* Feature: Base Model as sub folder option. +* Feature: Ability to multi-download to selected folder. +* Feature: Use the same folder as older versions when updating using multi-download. +* Feature: txt2img and img2img CivitAI buttons can use local HTML file, toggle in settings. +* Note: Save images no longer saves .html and API info, save model info does this instead now. +* New setting: Save API info of model when saving model info. +* New setting: Automatically save all images after download. +* New setting: Use local HTML file for model info. +* Bug fix: better JSON decode, now forces UTF-8 +* Bug fix: Now uses the proper default file when using multi-download +* Bug fix: Hide early access models fix, now works when published_at does not exist in API. +* Bug fix: Fix attempt for queue clearing upon download fail. + +--- +v3.2.5
+ +* Bug fix: Removed default API Key since it gets blocked after many downloads. + - Because of this it's now required for some downloads to use a personal CivitAI key, this can be set in the the settings tab of SD-WebUI under the CivitAI Browser+ tab. +* Bug fix: Fixed bug when selecting a model from txt2img/img2img that doesn't exist on CivitAI. +* Bug fix: Changed model selection to Model ID instead of model name + - This previously caused issues when 2 models were named the same. +* Bug fix: Fixed an issue where the default file was not properly used by default. +* Bug fix: Fixed some tiles not being selectable due to having "'" in its title +* Bug fix: Now automatically removes residual Aria2 files. + +--- +v3.2.4
+ +* Bug fix: Fix version detection for non standard SD-WebUI versions. +* Bug fix: Retry to fetch ModelID if previously not found in update functions. +* Bug fix: Style fix for when the Lobe theme is used in SD-WebUI +* Bug fix: Better required packages import error catching. +* Bug fix: Fixed CivitAI button scaling in txt2img and img2img tabs. +* Bug fix: Added ability to handle models that have no hashes saved. + +--- +v3.2.3
+ +* Bug fix: Generate hash toggle in update models was inverted (silly mistake, sry bout that) +* Bug fix: Better error detection if no model IDs were retrieved during update functions. +* Bug fix: Better error handling if a local model does not exist on CivitAI + +--- +v3.2.2
+ +* Bug fix: Fixed an `api_response` issue in the update model functions +* Bug fix: Reverted automatically retrieving base models to fix startup issues +* Bug fix: Better error description if a model no longer exists on CivitAI +* Bug fix: Primary file is now used as default file. +* Bug fix: Search after updating models no longer returns errors. + +--- +v3.2.1
+ +* Feature: Extension now automatically retrieves latest base models from CivitAI. +* Bug fix: Hotfix for functionality with SD.Next + +--- +v3.2.0
+ +* Feature: A toggle for One-Time hash generation for externally downloaded models. +* Feature: Updated extension settings layout for SD-WebUI 1.7.0 and higher. +* Bug fix: Set default value of Lora & LoCON combination based on SD-WebUI version. +* Bug fix: LORA models with embedding files now get placed inside embeddings folder. +* Bug fix: Better tile count handling to avoid issues with incorrect tile count. +* Bug fix: Better settings saving/loading to prevent writing issues. + +--- +v3.1.1
+ +* Bug fix: Early Access models now get correctly hidden/detected. +* Bug fix: Better timeout/offline server detection for options in "Update Models" tab. +* Bug fix: Better error detection if required packages were not installed/imported. +* Bug fix: Download button now displays as "Add to queue" during active download. + +--- +v3.1.0
+ +* Feature: Send to txt2img, Send any image in the model info to txt2img. +* Feature: Added new Base model filters: + - SD 1.5 LCM, SDXL 1.0 LCM, SDXL Distilled, SDXL Turbo, SVD, SVD XT +* Feature: Hide installed models filter toggle. +* Feature: Better display of permissions and tags in model info. +* New setting: Append sub folders to custom image path. +* New setting: Toggle gif/video playback, Disable if videos are causing high CPU usage. +* Bug fix: Better handling if hash is not found. + +--- +v3.0
+ +* Feature: Download queue! Ability to add downloads to a queue. (Finally!) +* Feature: Checkboxes to download multiple models at once. + - This will automatically use the first version and first file of the selected model(s). + - Will use the default sub folders per content type defined in sub folder settings. +* Feature: "Select all" button to select all downloadable models at once. +* Feature: "Open on CivitAI" button when viewing a models metadata in txt2img or img2img. + - Will only display if the model's info has been saved to the .json after v3.0 +* Feature: Ability to rename model filename + - Note that it's not recommended to change the filename since some checks rely on it. +* Bug fix: Fixed display of saved .html files. +* Bug fix: Removed potential illegal characters from file name/path name. +* Bug fix: Fixed case sensitive sorting of sub folders. + +--- +v2.1.0
+ +* Feature: "Overwrite any existing previews, tags or descriptions" Toggle in Update tab. +* Feature: Added content type "All" to model scanning to select all content types. + +--- +v2.0.1
+ +* Bug fix: Folders starting with "." now no longer show sub folders. +* Bug fix: Added headers to simulate browser request. (May fix issues for users from Russia) + +--- +v2.0
+ +* Feature: New button on each model card in txt2img and img2img to view it in the extension. +Preview
+ + + +v1.16
+ +* Feature: Ability to download/update model preview images in Update Models tab. +* Feature: "Update model tags" changed to "Update model info & tags". + - The option now saves tags, description and base model version. + - This also applies to the browser, saved tags is changed to save model info. +* Bug fix: Archived models are now hidden since they cannot be used. + +--- +v1.15.2
+ +* New setting: Custom save images location +* New setting: Default sub folders + - Any sub folders you have will be able to be selected as default, per content type. + - If a content type doesn't appear, then it means there are no subfolders in that type. +* Bug fix: Unreleased models caused a crash, now hidden by default since they can't be used. + +--- +v1.15.1
+ +* New setting: Show console logs during update scanning. +* Bug fix: Scan for update no longer prints incorrect info about outdated models. +* Bug fix: Removed bad logic which triggered the same function multiple times. +* Cleanup: Optimized functions and improved the speed of selecting models. + +--- +v1.15
+ +* Feature: Filter option to show favorited models. (requires personal API key) +* Feature: Back to top button when viewing model details. +* New setting: Page navigation as header. (keeps page navigation always visible at the top) +* Bug fix: Aria2 now restarts when UI is reloaded. +* Bug fix: SHA256 error fixed if .json files don't contain it. +* Bug fix: Cleaned up javascript code. + +--- +v1.14.7
+ +* New setting: Hide early access models (EA models are only downloadable by supporters) +* New setting: Personal CivitAI API key (Text field to insert personal API key) + - Useful for CivitAI supporters, you can use your own API Key to allow downloading Early Access models +* Bug fix: Extension now works with `no gradio queue` flag. +* Bug fix: Auto disable Aria2 on MacOS due to incompatibility. +* Bug fix: Now properly works on SD.Next again. +* Bug fix: Download progression and cancelling is no longer broken on old download method. +* Bug fix: Extension now correctly downloads models where it is required to be logged in. +* Bug fix: Extension no longer attempts to install already installed requirements. + +--- +v1.14.6
+ +* Bug fix: Removed pre-load of default page, caused issues for some users. +* Bug fix: Fixed internal model naming, caused issues when model names included ' +* Bug fix: Different host for .svg icons, caused issues with MalwareBytes. +* Bug fix: Preview saving was broken due to passing the wrong file path. + +--- +v1.14.5
+ +* Feature: Base Model filter now impacts search results. +* Feature: Ability to input model URL into search bar to find corresponding model. +* Bug fix: Adetailer models now get placed in the correct folder + +--- +v1.14.4
+ +* Bug fix: Page slider broke the Next Page button when loaded from "Update Models". +* Bug fix: "Save settings as default" button inserted broken .json data. +* Bug fix: Triggering "Scan for available updates" twice resulted in an error. + +--- +v1.14.3
+ +* Bug fix: LORA content type was broken when "Treat LoCon as LORA" was turned on. + +--- +v1.14.2
+ +* Feature: Custom page handling when scanning models. +* Bug fix: Model scan feature now works for large model count (+900) +* Bug fix: Better broken .json error handling + +--- +v1.14.1
+ +* Bug fix: Gifs did not display properly. +* Bug fix: Video's no longer save as preview since they cannot be used. +* Bug fix: Filter window was not hidden by default. + +--- +v1.14
+ +* Feature: Redesign of UI. +* Feature: New dropdown with filter settings. +* Feature: Button to save current filter settings as default. (requires restart) +* Feature: Tag box can now be typed in to save custom tags. +* Feature: Delete function removes any unpacked files. + +--- +v1.13
+ +* Feature: Updated available content types: + - Upscaler + - MotionModule + - Wildcards + - Workflows + - Other +* Feature: Videos can now also be displayed on preview cards and in the model info. +* Feature: Automatically scans upscaler type by looking through model's description. +* Feature: Automatically identify correct folder for wildcards based on extension. +* Bug fix: Version ID got saved instead of correct Model ID after download. + +--- +v1.12.5
+ +* Bug fix: [Installed] tag was only assigned to latest installed version. +* Bug fix: Folder location didn't update when selecting different version/file. +* Bug fix: Version scanning didn't properly scan sha256 in uppercase. + +--- +v1.12.4
+ +* Feature: You can now refresh by pressing Ctrl+Enter and Alt+Enter. +* Bug fix: Auto unpack feature was unpacking unintended archives, now only unpacks .zip. + +--- +v1.12.3
+ +* New setting: Option to toggle automatically unpacking .zip models. +* Bug fix: Error wasn't catched when file path was incorrect. + +--- +v1.12.2
+ +* Feature: Able to download multiple files from each version. +* Bug fix: Models did not get deleted properly when in nested folders. +* Bug fix: Wrong sha256 was being saved after downloading. +* Bug fix: Wrong default folder was used when installed model got selected. + +--- +v1.12.1
+ +* Feature: File deletion now uses both SHA256 and file name to detect correct file. +* New setting: Option to toggle automatically inserting 2 default sub folders. +* New setting: Option to toggle installing LoCON's in LORA folder. +* Bug fix: Default file was incorrect when selecting a model. +* Bug fix: Next Page caused an error when changing content type. + +--- +v1.12
+ +* Feature: Ability to load all selected installed models into browser in Update Models tab. +* Feature: Installed/outdated models check is now done using SHA256 + file name. +* Feature: Ability to select multiple content Types when searching and scanning. +* Feature: Greatly improved speed of model scanning if model ID is saved in .json + +--- +v1.11.2
+ +* Feature: Redesign of model page by [ManOrMonster](https://github.com/ManOrMonster) +*Model page changes (https://github.com/BlafKing/sd-civitai-browser-plus/pull/33)
+ + - Redesigned the look of the model page. + - Added link to model page on CivitAI. Click on model name to open. + - Added link to uploader/creator page on CivitAI. Click creator name to open. + - Added CivitAI avatar display. + - Separate description section. + - First sample image is marked with data attribute and downloaded as preview image instead of grabbing first in model HTML. This guarantees that the first sample image (not avatar or image in description) is used when downloading the model. + - Sample images are marked with data attribute so that only they are downloaded when using "Save Images" (no description images or avatar). + - Removed trained tags from info since they are displayed above. + - Each sample image has its own section. + - Sample images zoom in when clicked, zoom out when clicking anywhere. + - Forced width is removed from sample image URLs so that nice big images can be viewed. + - Metadata is arranged so that the most commonly used data is at the top, no more searching for prompts. + - Extra metadata is in accordion labeled "More details...". This is especially useful to hide insanely large ComfyUI JSON. + +v1.11.1
+ +* Feature: Error detection during Aria2 downloads. +* Bug fix: Avoid starting Aria2 RPC multiple times with better port check. +* Bug fix: Fixed dynamic tile status updates after deleting/downloading. +--- + +v1.11
+ +* Feature: Ability to scan all installed models for available updates. +* Feature: Model ID and sha256 get saved to .json after scanning or downloading a model. +* Bug fix: Fixed crash when base model is not found. +* Bug fix: No longer overwrite sha256 and model ID in existing .json. +--- + +v1.10.1
+ +* Bug fix: Fixed pathing for Unix systems +* Bug fix: Extra checks to prevent deleting unintentional files. +* Feature: Models get moved to trash instead of fully deleted. +--- +v1.10
+ +* Feature: Update tags for all installed models! +* Feature: Tabs for Browsing and updating Tags. +* Feature: Buttons to select which folders to update tags in. +--- +v1.9.4
+ +* Feature: Added Civit AI settings tab + - New setting: Disable downloading with Aria2. (will use old download method instead) + - New setting: Disable using Async DNS. (can fix issues for some users who use DNS managing programs) + - New setting: Show Aria2 logs in the CMD. + - New setting: Set the amount of connections when downloading a model with Aria2. + (The optimal connection count is different per user, try to find the lowest option which still gives you full bandwidth speed) +--- +v1.9.3
+ +* Feature: Included Motrix Aria2 version. +* Feature: Max connections per server set to 64 and split file set 64. +* Feature: Aria2 is now shipped with this extension for Linux as well. +--- + +v1.9.2
+ +* Cleanup: Split up script into multiple files for improved oversight/readability. +* Cleanup: Centered model icons +--- + +v1.9.1
+ +* Bug fix: Added back old download function if aria2 fails. +--- + +v1.9
+ +* Feature: Faster downloads by using Aria2. +* Feature: More info about current download: Speed, ETA, File Size and % completion. +--- + +v1.8.1
+ +* Feature: Sub Folder list now contains 2 default options: `/{Model name}` & `/{Model name}/{Version name}` +--- + +v1.8
+ +* Feature: Ability to download different file types per version. +* Feature: NSFW Toggle is now dynamic. +* Feature: Version list now dynamically updates after download. +* Cleanup: Rearranged/Resized UI elements. +* Bug fix: Downloading models now uses file ID instead of names. +* Bug fix: NSFW Toggle no longer hides images tagged as "Soft". +* Bug fix: Fixed each model load running twice. +--- + +v1.7.2
+ +* Bug fix: Download button did not get re-enabled properly. +* Bug fix: Tile status did not get updated properly when download failed. +--- + +v1.7.1
+ +* Feature: Base Model filtering dims tiles instead of hiding. +* Bug fix: NSFW Blur increases with tile size. +* Bug fix: Dynamic tile status after installation & deletion now correctly detects other versions. +--- + +v1.7
+ +* Feature: Introduced seperate download progress bar, browse while downloading. +* Feature: no more force refresh after installing, cancelling and deleting. +* Feature: Added toggle to sort Tiles by date. +* Feature: Dynamic changing of tile borders after installation & deletion. +* Removal: 'Auto delete old version' removed since it relied on a reload. +--- + +v1.6
+ +* Bug fix: Page count is now always correclty read when refreshing. +(You can fill in the page number you'd like to visit and press refresh to go to that page) +* Feature: 'Filter Base Model' to dynamically hide any unselected Base models. +(Please note: This does not impact search results, since the CivitAI API does not yet support this) +--- + +v1.5
+ +* Feature: Slider to change tile size. +* Feature: Download Folder textbox which can be used to define a custom download path. +* Feature: Sub Folder Dropdown to select any available subfolder(s) as download location. +* Feature: Display a timed out message instead of an error icon. +* Bug fix: Nested files can now be detected as installed or outdated. +* Bug fix: Auto selects corresponding folder of any installed models. +* Bug fix: Better cancellation logic to prevent downloads from continuing. +--- + +v1.4
+ +* Feature: Download progress bar is now on web page instead of CMD. +* Feature: Added Cancel and Delete buttons. +* Feature: Download button will now change according to circumstances: + - Cancel button if there's a current download. + - Delete button if the selected version is installed. +* Cleanup: Better margin fixes with theme detection. +* Bug fix: Delete option now also removes .json files. +* Bug fix: Buttons are now disabled during download. (except cancel button) +--- + +v1.3.1
+ +* Bug fix: Fixed tag saving bugs/oversights. +* Bug fix: Trained tags display now do not include the model itself. +--- + +v1.3
+ +* Feature: 'Save Tags' button saves tags to a .json file which gets used in image creaton. + (If a LORA with saved tags is used it will automatically input all tags into the txt box in image creation) +* Feature: 'Save tags after download' toggle to automatically save .json tags. +* Cleanup: Removed "Get model info" button. +* Cleanup: Removed download link box. +* Cleanup: Removed "No" from search options. +* Cleanup: Added border radius to cards. +* Cleanup: Improved padding based on if Lobe theme is being used. +--- + +v1.2
+ +* Feature: Automatically saves preview image when downloading a model. +* Feature: Added [installed] text suffix for any versions that are installed in the 'Version' tab. +* Cleanup: Changed 'Model Filename' from a dropbox to a textbox. +* Cleanup: Made bottom textboxes non typeable. +* Cleanup: Disabled bottom buttons when no model is selected. +* Bug fix: Margin error on the latest tile. +* Bug fix: Version checking is now case sensitive. +* Bug fix: Default verison in version tab shows installed version. +--- + +v1.1
+ +* Feature: Dropdown box which can filter by time period. +* Cleanup: 'Content type' changed from buttons to a dropdown box. +* Bug fix: Fixed tiles not reloading when already pressed. +--- + +v1.0
+ +* Feature: 'Refresh' now reloads the current page unless any options have been changed. +* Feature: Made the page refresh after a download and made it load during one. +* Feature: Orange glow for any outdated installed packages. +* Feature: 'Delete old version after download' option. +* Feature: Ability to manually fill in a page number to load the corresponding page. +* Cleanup: Removed new folder option. +* Cleanup: Made the glow around frames always visible without hovering. +* Pulled fork from: [SignalFlagZ's Fork](https://github.com/SignalFlagZ/sd-civitai-browser) [v1.1.0](https://github.com/SignalFlagZ/sd-civitai-browser/releases/tag/1.1.0) diff --git a/extensions/sd-civitai-browser-plus/aria2/lin/aria2 b/extensions/sd-civitai-browser-plus/aria2/lin/aria2 new file mode 100644 index 0000000000000000000000000000000000000000..b93f84f39353b2784d18c91d1525d8f12f904aa6 --- /dev/null +++ b/extensions/sd-civitai-browser-plus/aria2/lin/aria2 @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:6f50816471fbd5e91c04df6cf6f995c6279d295b70187f313e6d3b04f65769fc +size 9926088 diff --git a/extensions/sd-civitai-browser-plus/aria2/running b/extensions/sd-civitai-browser-plus/aria2/running new file mode 100644 index 0000000000000000000000000000000000000000..e69de29bb2d1d6434b8b29ae775ad8c2e48c5391 diff --git a/extensions/sd-civitai-browser-plus/aria2/win/aria2.exe b/extensions/sd-civitai-browser-plus/aria2/win/aria2.exe new file mode 100644 index 0000000000000000000000000000000000000000..5485d42b9ba6f54ef5dfa6c71150ea725737d493 --- /dev/null +++ b/extensions/sd-civitai-browser-plus/aria2/win/aria2.exe @@ -0,0 +1,3 @@ +version https://git-lfs.github.com/spec/v1 +oid sha256:098a065ab71f639bf7048e790c870756fd6e83de9cc678915bbd07077d473fa2 +size 8136704 diff --git a/extensions/sd-civitai-browser-plus/install.py b/extensions/sd-civitai-browser-plus/install.py new file mode 100644 index 0000000000000000000000000000000000000000..8e0287ccd04497e40b84f58bc619d0fb434ded43 --- /dev/null +++ b/extensions/sd-civitai-browser-plus/install.py @@ -0,0 +1,20 @@ +import launch +from pathlib import Path + +aria2path = Path(__file__).resolve().parents[0] / "aria2" + +for item in aria2path.iterdir(): + if item.is_file(): + item.unlink() + +def install_req(check_name, install_name=None): + if not install_name: install_name = check_name + if not launch.is_installed(f"{check_name}"): + print("") + launch.run_pip(f"install {install_name}", f"Installing missing requirement \"{check_name}\" for CivitAI Browser") + +install_req("send2trash", "send2trash==1.8.2") +install_req("zip_unicode", "ZipUnicode==1.1.1") +install_req("bs4", "beautifulsoup4==4.12.3") +install_req("packaging","packaging==23.2") +install_req("pysocks","pysocks==1.7.1") \ No newline at end of file diff --git a/extensions/sd-civitai-browser-plus/javascript/Sortable.min.js b/extensions/sd-civitai-browser-plus/javascript/Sortable.min.js new file mode 100644 index 0000000000000000000000000000000000000000..bb9953355480571864d048d1b4070237af5027d6 --- /dev/null +++ b/extensions/sd-civitai-browser-plus/javascript/Sortable.min.js @@ -0,0 +1,2 @@ +/*! Sortable 1.15.2 - MIT | git://github.com/SortableJS/Sortable.git */ +!function(t,e){"object"==typeof exports&&"undefined"!=typeof module?module.exports=e():"function"==typeof define&&define.amd?define(e):(t=t||self).Sortable=e()}(this,function(){"use strict";function e(e,t){var n,o=Object.keys(e);return Object.getOwnPropertySymbols&&(n=Object.getOwnPropertySymbols(e),t&&(n=n.filter(function(t){return Object.getOwnPropertyDescriptor(e,t).enumerable})),o.push.apply(o,n)),o}function I(o){for(var t=1;tThe"); + + extractedText = extractedText.replace(/\\n\s* 0) { + return; + } + const genButton = gradioApp().querySelector('#txt2img_extra_tabs > div > button') + let input = element.querySelector('dd').textContent; + let inf; + if (input.endsWith(',')) { + inf = input + ' '; + } else { + inf = input + ', '; + } + let is_positive = false + let is_negative = false + switch(type) { + case 'Prompt': + is_positive = true + break; + case 'Negative prompt': + inf = 'Negative prompt: ' + inf; + is_negative = true + break; + case 'Seed': + inf = 'Seed: ' + inf; + inf = inf + inf + inf; + break; + case 'Size': + inf = 'Size: ' + inf; + inf = inf + inf + inf; + break; + case 'Model': + inf = 'Model: ' + inf; + inf = inf + inf + inf; + break; + case 'Clip skip': + inf = 'Clip skip: ' + inf; + inf = inf + inf + inf; + break; + case 'Sampler': + inf = 'Sampler: ' + inf; + inf = inf + inf + inf; + break; + case 'Steps': + inf = 'Steps: ' + inf; + inf = inf + inf + inf; + break; + case 'CFG scale': + inf = 'CFG scale: ' + inf; + inf = inf + inf + inf; + break; + } + const prompt = gradioApp().querySelector('#txt2img_prompt textarea'); + const neg_prompt = gradioApp().querySelector('#txt2img_neg_prompt textarea'); + const cfg_scale = gradioApp().querySelector('#txt2img_cfg_scale > div:nth-child(2) > div > input'); + let final = ''; + let cfg = 'CFG scale: ' + cfg_scale.value + ", " + let prompt_addon = cfg + cfg + cfg + if (is_positive) { + final = inf + "\nNegative prompt: " + neg_prompt.value + "\n" + prompt_addon; + } else if (is_negative) { + final = prompt.value + "\n" + inf + "\n" + prompt_addon; + } else { + final = prompt.value + "\nNegative prompt: " + neg_prompt.value + "\n" + inf; + } + genInfo_to_txt2img(final, false) + hidePopup(); + sendClick(genButton); +} + +// Creates a list of the selected models +var selectedModels = []; +var selectedTypes = []; +function multi_model_select(modelName, modelType, isChecked) { + if (arguments.length === 0) { + selectedModels = []; + selectedTypes = []; + return; + } + if (isChecked) { + if (!selectedModels.includes(modelName)) { + selectedModels.push(modelName); + } + selectedTypes.push(modelType) + } else { + var modelIndex = selectedModels.indexOf(modelName); + if (modelIndex > -1) { + selectedModels.splice(modelIndex, 1); + } + var typesIndex = selectedTypes.indexOf(modelType); + if (typesIndex > -1) { + selectedTypes.splice(typesIndex, 1); + } + } + const selected_model_list = gradioApp().querySelector('#selected_model_list textarea'); + selected_model_list.value = JSON.stringify(selectedModels); + + const selected_type_list = gradioApp().querySelector('#selected_type_list textarea'); + selected_type_list.value = JSON.stringify(selectedTypes); + + updateInput(selected_model_list); + updateInput(selected_type_list); +} + +function sendClick(location) { + const clickEvent = new MouseEvent('click', { + view: window, + bubbles: true, + cancelable: true + }); + location.dispatchEvent(clickEvent); +} + +let currentDlCancelled = false; + +function cancelCurrentDl() { + currentDlCancelled = true; +} + +let allDlCancelled = false; + +function cancelAllDl() { + allDlCancelled = true; +} + +function setSortable() { + new Sortable(document.getElementById('queue_list'), { + onEnd: function(evt) { + const gradio_input = document.querySelector('#civitai_dl_list.prose').innerHTML; + const gradio_html = gradioApp().querySelector('#queue_html_input textarea'); + let output = gradioApp().querySelector('#arrange_dl_id textarea'); + output.value = evt.item.getAttribute('dl_id') + "." + evt.newIndex; + updateInput(output); + gradio_html.value = gradio_input; + updateInput(gradio_html); + } + }); +} + +function cancelQueueDl() { + const cancelBtn = gradioApp().querySelector('#html_cancel_input textarea'); + const randomNumber = Math.floor(Math.random() * 1000); + const paddedNumber = String(randomNumber).padStart(3, '0'); + cancelBtn.value = paddedNumber; + updateInput(cancelBtn);cancelBtn +} + +function setDownloadProgressBar() { + const gradio_html = gradioApp().querySelector('#queue_html_input textarea'); + let browserContainer = document.querySelector('#DownloadProgress'); + let browserProgress = browserContainer.querySelector('.progress-bar'); + if (!browserProgress || !browserProgress.style.width) { + setTimeout(setDownloadProgressBar, 500); + return; + } + + let dlList = document.getElementById('civitai_dl_list'); + let nonQueue = dlList.querySelector('.civitai_nonqueue_list'); + let dlItem = dlList.querySelector('.civitai_dl_item'); + let dlBtn = dlItem.querySelector('.dl_action_btn > span'); + dlBtn.innerText = "Cancel"; + dlBtn.setAttribute('onclick', 'cancelQueueDl()'); + let dlId = dlItem.getAttribute('dl_id'); + let selector = '.civitai_dl_item[dl_id="' + parseInt(dlId) + '"]'; + + let dlProgressBar = null; + let percentage = null; + let dlText = null; + + nonQueue.appendChild(dlItem); + + const interval = setInterval(() => { + browserContainer = document.querySelector('#DownloadProgress'); + browserProgress = browserContainer.querySelector('.progress-bar'); + dlText = browserContainer.querySelector('.progress-level-inner'); + if (!dlText) { + return; + } + dlText = dlText.innerText + percentage = parseFloat(browserProgress.style.width); + + dlItem = dlList.querySelector(selector); + dlProgressBar = dlItem.querySelector('.dl_progress_bar'); + + dlProgressBar.textContent = percentage.toFixed(1) + '%'; + dlProgressBar.style.width = percentage + '%'; + + if (percentage >= 100) { + clearInterval(interval); + dlBtn = dlItem.querySelector('.dl_action_btn > span'); + dlBtn.innerText = "Remove"; + dlBtn.setAttribute('onclick', 'removeDlItem(' + parseInt(dlId) + ', this)'); + dlItem.className = 'civitai_dl_item_completed'; + dlProgressBar.textContent = 'Completed'; + dlProgressBar.style.width = '100%'; + const gradio_input = document.querySelector('#civitai_dl_list.prose').innerHTML; + gradio_html.value = gradio_input + updateInput(gradio_html); + return; + } + + if (currentDlCancelled) { + clearInterval(interval); + dlBtn = dlItem.querySelector('.dl_action_btn > span'); + dlBtn.innerText = "Remove"; + dlBtn.setAttribute('onclick', 'removeDlItem(' + parseInt(dlId) + ', this)'); + currentDlCancelled = false; + dlItem.className = 'civitai_dl_item_failed'; + dlProgressBar.textContent = 'Cancelled'; + dlProgressBar.style.width = "0%"; + const gradio_input = document.querySelector('#civitai_dl_list.prose').innerHTML; + gradio_html.value = gradio_input + updateInput(gradio_html); + return; + } else if (allDlCancelled) { + clearInterval(interval); + allDlCancelled = false; + let dlItems = dlList.querySelectorAll('.civitai_dl_item'); + dlItems.forEach(function(item) { + dlBtn = dlItem.querySelector('.dl_action_btn > span'); + dlBtn.innerText = "Remove"; + dlBtn.setAttribute('onclick', 'removeDlItem(' + parseInt(dlId) + ', this)'); + dlProgressBar = item.querySelector('.dl_progress_bar'); + dlProgressBar.textContent = 'Cancelled'; + dlProgressBar.style.width = "0%"; + nonQueue.appendChild(item); + item.className = 'civitai_dl_item_failed'; + }); + const gradio_input = document.querySelector('#civitai_dl_list.prose').innerHTML; + gradio_html.value = gradio_input + updateInput(gradio_html); + return; + } else if (dlText.includes('Encountered an error during download of') || dlText.includes('not found on CivitAI servers') || dlText.includes('requires a personal CivitAI API to be downloaded')) { + clearInterval(interval); + dlBtn = dlItem.querySelector('.dl_action_btn > span'); + dlBtn.innerText = "Remove"; + dlBtn.setAttribute('onclick', 'removeDlItem(' + parseInt(dlId) + ', this)'); + dlItem.className = 'civitai_dl_item_failed'; + dlProgressBar.textContent = 'Failed'; + dlProgressBar.style.width = "0%"; + const gradio_input = document.querySelector('#civitai_dl_list.prose').innerHTML; + gradio_html.value = gradio_input + updateInput(gradio_html); + return; + } + }, 500); +} + +function removeDlItem(dl_id, element) { + const gradio_html = gradioApp().querySelector('#queue_html_input textarea'); + const output = gradioApp().querySelector('#remove_dl_id textarea'); + var dl_item = element.parentNode.parentNode; + dl_item.parentNode.removeChild(dl_item); + output.value = dl_id + updateInput(output); + + const gradio_input = document.querySelector('#civitai_dl_list.prose').innerHTML; + gradio_html.value = gradio_input; + updateInput(gradio_html); +} + +// Selects all models +function selectAllModels() { + const checkboxes = Array.from(document.querySelectorAll('.model-checkbox')); + const allChecked = checkboxes.every(checkbox => checkbox.checked); + const allUnchecked = checkboxes.every(checkbox => !checkbox.checked); + if (allChecked || allUnchecked) { + checkboxes.forEach(sendClick); + } else { + checkboxes.filter(checkbox => !checkbox.checked).forEach(sendClick); + } +} + +// Deselects all models +function deselectAllModels() { + setTimeout(() => { + const checkboxes = Array.from(document.querySelectorAll('.model-checkbox')); + checkboxes.filter(checkbox => checkbox.checked).forEach(sendClick); + }, 1000); +} + +// Sends Image URL to Python to pull generation info +function sendImgUrl(image_url) { + const randomNumber = Math.floor(Math.random() * 1000); + const genButton = gradioApp().querySelector('#txt2img_extra_tabs > div > button') + const paddedNumber = String(randomNumber).padStart(3, '0'); + const input = gradioApp().querySelector('#civitai_text2img_input textarea'); + input.value = paddedNumber + "." + image_url; + updateInput(input); + hidePopup(); + sendClick(genButton); +} + +// Sends txt2img info to txt2img tab +function genInfo_to_txt2img(genInfo, do_slice=true) { + let insert = gradioApp().querySelector('#txt2img_prompt textarea'); + let pasteButton = gradioApp().querySelector('#paste'); + if (genInfo) { + insert.value = do_slice ? genInfo.slice(5) : genInfo; + insert.dispatchEvent(new Event('input', { bubbles: true })); + pasteButton.dispatchEvent(new Event('click', { bubbles: true })); + } +} + +// Hide installed models +function hideInstalled(toggleValue) { + const modelList = document.querySelectorAll('.column.civmodellist > .civmodelcardinstalled') + modelList.forEach(item => { + item.style.display = toggleValue ? 'none' : 'block'; + }); +} + +function setDescriptionToggle() { + const popUp = document.querySelector(".civitai-overlay-inner"); + let toggleButton = null; + let descriptionDiv = null; + + if (popUp) { + descriptionDiv = popUp.querySelector(".model-description"); + toggleButton = popUp.querySelector(".description-toggle-label"); + } else { + descriptionDiv = document.querySelector(".model-description"); + toggleButton = document.querySelector(".description-toggle-label"); + } + + if (descriptionDiv && descriptionDiv.scrollHeight <= 400) { + toggleButton.style.visibility = "hidden"; + toggleButton.style.height = "0"; + descriptionDiv.style.position = "unset"; + } +} + +// Runs all functions when the page is fully loaded +function onPageLoad() { + updateSVGIcons(); + + let subfolderDiv = document.querySelector("#settings_civitai_browser_plus > div > div"); + let downloadDiv = document.querySelector("#settings_civitai_browser_download > div > div"); + let settingsDiv = document.querySelector("#settings_civitai_browser > div > div"); + + if (subfolderDiv || downloadDiv) { + let div = subfolderDiv || downloadDiv; + let subfolders = div.querySelectorAll("[id$='subfolder']"); + createAccordion(div, subfolders, "Default sub folders", 'default-sub-accordion'); + + subfolders = div.querySelectorAll("[id^='setting_insert_sub']"); + createAccordion(div, subfolders, "Insert sub folder options", 'insert-sub-accordion'); + } + + if (subfolderDiv || settingsDiv) { + let div = subfolderDiv || settingsDiv; + let proxy = div.querySelectorAll("[id$='proxy']"); + createAccordion(div, proxy, "Proxy options", 'proxy-accordion'); + } + + let toggle4L = document.getElementById('toggle4L'); + let toggle4 = document.getElementById('toggle4'); + let hash_toggle_hover = document.querySelector('#skip_hash_toggle > label'); + let hash_toggle = document.querySelector('#skip_hash_toggle'); + + if (toggle4L || toggle4) { + let like_toggle = toggle4L || toggle4; + let insertText = 'Requires an API Key\nConfigurable in CivitAI settings tab'; + createTooltip(like_toggle, like_toggle, insertText); + } + + if (hash_toggle) { + let insertText = 'This option generates unique hashes for models that were not downloaded with this extension.\nA hash is required for any of the options below to work, a model with no hash will be skipped.\nInitial hash generation is a one-time process per file.'; + createTooltip(hash_toggle, hash_toggle_hover, insertText); + } + + addOnClickToButtons(); + createCivitAICardButtons(); + adjustFilterBoxAndButtons(); + setupClickOutsideListener(); + updateBackToTopVisibility([{isIntersecting: false}]); +} + +onUiLoaded(onPageLoad); + +function checkSettingsLoad() { + const divElement = gradioApp().querySelector('#setting_custom_api_key'); + const infoElement = divElement?.querySelector('.info'); + if (!infoElement) { + return; + } + clearInterval(settingsLoadInterval); + createLink(infoElement); +} +let settingsLoadInterval = setInterval(checkSettingsLoad, 1000); \ No newline at end of file diff --git a/extensions/sd-civitai-browser-plus/requirements.txt b/extensions/sd-civitai-browser-plus/requirements.txt new file mode 100644 index 0000000000000000000000000000000000000000..1bbc4bb55e040a928898b72a6fec2f6b50aa8b86 --- /dev/null +++ b/extensions/sd-civitai-browser-plus/requirements.txt @@ -0,0 +1,5 @@ +send2trash==1.8.2 +ZipUnicode==1.1.1 +beautifulsoup4==4.12.3 +packaging==23.2 +pysocks==1.7.1 \ No newline at end of file diff --git a/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_api.cpython-310.pyc b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_api.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..c93a00cb834afe33d1fb6bb52ba69b2678f88127 Binary files /dev/null and b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_api.cpython-310.pyc differ diff --git a/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_download.cpython-310.pyc b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_download.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..084bb8e296c0dbc4951cb98fcd35f94a50e1a393 Binary files /dev/null and b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_download.cpython-310.pyc differ diff --git a/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_file_manage.cpython-310.pyc b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_file_manage.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..036daa953e0e77dcbb179020391567563e36c36a Binary files /dev/null and b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_file_manage.cpython-310.pyc differ diff --git a/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_global.cpython-310.pyc b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_global.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..7f5a8e068aa2cd99c6e48ab81906abc88eb951ad Binary files /dev/null and b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_global.cpython-310.pyc differ diff --git a/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_gui.cpython-310.pyc b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_gui.cpython-310.pyc new file mode 100644 index 0000000000000000000000000000000000000000..ce1e0df19144e5f4031c51c60b3a16fe1a31e18e Binary files /dev/null and b/extensions/sd-civitai-browser-plus/scripts/__pycache__/civitai_gui.cpython-310.pyc differ diff --git a/extensions/sd-civitai-browser-plus/scripts/civitai_api.py b/extensions/sd-civitai-browser-plus/scripts/civitai_api.py new file mode 100644 index 0000000000000000000000000000000000000000..92fa53d50b75277607cc335b87fdc8f325628b0c --- /dev/null +++ b/extensions/sd-civitai-browser-plus/scripts/civitai_api.py @@ -0,0 +1,1217 @@ +import requests +import json +import gradio as gr +import urllib.request +import urllib.parse +import urllib.error +import os +import re +import datetime +import platform +from PIL import Image +from io import BytesIO +from collections import defaultdict +from datetime import datetime, timezone +from modules.images import read_info_from_image +from modules.shared import cmd_opts, opts +from modules.paths import models_path, extensions_dir, data_path +from html import escape +from scripts.civitai_global import print, debug_print +import scripts.civitai_global as gl +import scripts.civitai_download as _download + +gl.init() + +def contenttype_folder(content_type, desc=None, fromCheck=False, custom_folder=None): + use_LORA = getattr(opts, "use_LORA", False) + folder = None + if desc: + desc = desc.upper() + else: + desc = "PLACEHOLDER" + if custom_folder: + main_models = custom_folder + main_data = custom_folder + else: + main_models = models_path + main_data = data_path + + if content_type == "modelFolder": + folder = os.path.join(main_models) + + if content_type == "Checkpoint": + if cmd_opts.ckpt_dir and not custom_folder: + folder = cmd_opts.ckpt_dir + else: + folder = os.path.join(main_models,"Stable-diffusion") + + elif content_type == "Hypernetwork": + if cmd_opts.hypernetwork_dir and not custom_folder: + folder = cmd_opts.hypernetwork_dir + else: + folder = os.path.join(main_models, "hypernetworks") + + elif content_type == "TextualInversion": + if cmd_opts.embeddings_dir and not custom_folder: + folder = cmd_opts.embeddings_dir + else: + folder = os.path.join(main_data, "embeddings") + + elif content_type == "AestheticGradient": + if not custom_folder: + folder = os.path.join(extensions_dir, "stable-diffusion-webui-aesthetic-gradients", "aesthetic_embeddings") + else: + folder = os.path.join(custom_folder, "aesthetic_embeddings") + + elif content_type == "LORA": + if cmd_opts.lora_dir and not custom_folder: + folder = cmd_opts.lora_dir + else: + folder = folder = os.path.join(main_models, "Lora") + + elif content_type == "LoCon": + folder = os.path.join(main_models, "LyCORIS") + if use_LORA and not fromCheck: + if cmd_opts.lora_dir and not custom_folder: + folder = cmd_opts.lora_dir + else: + folder = folder = os.path.join(main_models, "Lora") + + elif content_type == "DoRA": + if cmd_opts.lora_dir and not custom_folder: + folder = cmd_opts.lora_dir + else: + folder = folder = os.path.join(main_models, "Lora") + + elif content_type == "VAE": + if cmd_opts.vae_dir and not custom_folder: + folder = cmd_opts.vae_dir + else: + folder = os.path.join(main_models, "VAE") + + elif content_type == "Controlnet": + if hasattr(cmd_opts, 'controlnet_dir') and cmd_opts.controlnet_dir and not custom_folder: + folder = cmd_opts.controlnet_dir + else: + folder = os.path.join(main_models, "ControlNet") + + elif content_type == "Poses": + folder = os.path.join(main_models, "Poses") + + elif content_type == "Upscaler": + if "SWINIR" in desc: + if cmd_opts.swinir_models_path and not custom_folder: + folder = cmd_opts.swinir_models_path + else: + folder = os.path.join(main_models, "SwinIR") + elif "REALESRGAN" in desc: + if cmd_opts.realesrgan_models_path and not custom_folder: + folder = cmd_opts.realesrgan_models_path + else: + folder = os.path.join(main_models, "RealESRGAN") + elif "GFPGAN" in desc: + if cmd_opts.gfpgan_models_path and not custom_folder: + folder = cmd_opts.gfpgan_models_path + else: + folder = os.path.join(main_models, "GFPGAN") + elif "BSRGAN" in desc: + if cmd_opts.bsrgan_models_path and not custom_folder: + folder = cmd_opts.bsrgan_models_path + else: + folder = os.path.join(main_models, "BSRGAN") + else: + if cmd_opts.esrgan_models_path and not custom_folder: + folder = cmd_opts.esrgan_models_path + else: + folder = os.path.join(main_models, "ESRGAN") + + elif content_type == "MotionModule": + folder = os.path.join(extensions_dir, "sd-webui-animatediff", "model") + + elif content_type == "Workflows": + folder = os.path.join(main_models, "Workflows") + + elif content_type == "Other": + if "ADETAILER" in desc: + folder = os.path.join(main_models, "adetailer") + else: + folder = os.path.join(main_models, "Other") + + elif content_type == "Wildcards": + folder = os.path.join(extensions_dir, "UnivAICharGen", "wildcards") + if not os.path.exists(folder): + folder = os.path.join(extensions_dir, "sd-dynamic-prompts", "wildcards") + + return folder + +def model_list_html(json_data): + video_playback = getattr(opts, "video_playback", True) + playback = "" + if video_playback: playback = "autoplay loop" + + hide_early_access = getattr(opts, "hide_early_access", True) + filtered_items = [] + current_time = datetime.now(timezone.utc) + + for item in json_data['items']: + versions_to_keep = [] + + for version in item['modelVersions']: + if not version['files']: + continue + + if hide_early_access: + early_access_deadline_str = version.get('earlyAccessDeadline') + if early_access_deadline_str: + early_access_deadline = datetime.strptime(early_access_deadline_str, "%Y-%m-%dT%H:%M:%S.%fZ").replace(tzinfo=timezone.utc) + if current_time <= early_access_deadline: + continue + + versions_to_keep.append(version) + + if versions_to_keep: + item['modelVersions'] = versions_to_keep + filtered_items.append(item) + + json_data['items'] = filtered_items + + HTML = '
 '
+
+ installstatus = None
+
+ for version in reversed(item['modelVersions']):
+ for file in version.get('files', []):
+ file_name = file['name']
+ file_sha256 = file.get('hashes', {}).get('SHA256', "").upper()
+
+ name_match = file_name in existing_files
+ sha256_match = file_sha256 in existing_files_sha256
+ if name_match or sha256_match:
+ if version == item['modelVersions'][0]:
+ installstatus = "civmodelcardinstalled"
+ else:
+ installstatus = "civmodelcardoutdated"
+ model_name_js = model_name.replace("'", "\\'")
+ model_string = escape(f"{model_name_js} ({model_id})")
+ model_card = f'
'
+
+ installstatus = None
+
+ for version in reversed(item['modelVersions']):
+ for file in version.get('files', []):
+ file_name = file['name']
+ file_sha256 = file.get('hashes', {}).get('SHA256', "").upper()
+
+ name_match = file_name in existing_files
+ sha256_match = file_sha256 in existing_files_sha256
+ if name_match or sha256_match:
+ if version == item['modelVersions'][0]:
+ installstatus = "civmodelcardinstalled"
+ else:
+ installstatus = "civmodelcardoutdated"
+ model_name_js = model_name.replace("'", "\\'")
+ model_string = escape(f"{model_name_js} ({model_id})")
+ model_card = f'{date}
' + HTML += '
')
+ if model_version is None:
+ selected_version = item['modelVersions'][0]
+ else:
+ for model in item['modelVersions']:
+ if model['name'] == model_version:
+ selected_version = model
+ break
+
+ if selected_version['trainedWords']:
+ output_training = ",".join(selected_version['trainedWords'])
+ output_training = re.sub(r'<[^>]*:[^>]*>', '', output_training)
+ output_training = re.sub(r', ?', ', ', output_training)
+ output_training = output_training.strip(', ')
+ if selected_version['baseModel']:
+ output_basemodel = selected_version['baseModel']
+ for file in selected_version['files']:
+ dl_dict[file['name']] = file['downloadUrl']
+
+ if not model_filename:
+ model_filename = file['name']
+ dl_url = file['downloadUrl']
+ gl.json_info = item
+ sha256_value = file['hashes'].get('SHA256', 'Unknown')
+
+ size = file['metadata'].get('size', 'Unknown')
+ format = file['metadata'].get('format', 'Unknown')
+ fp = file['metadata'].get('fp', 'Unknown')
+ sizeKB = file.get('sizeKB', 0) * 1024
+ filesize = _download.convert_size(sizeKB)
+
+ unique_file_name = f"{size} {format} {fp} ({filesize})"
+ is_primary = file.get('primary', False)
+ file_list.append(unique_file_name)
+ file_dict.append({
+ "format": format,
+ "sizeKB": sizeKB
+ })
+ if is_primary:
+ default_file = unique_file_name
+ model_filename = file['name']
+ dl_url = file['downloadUrl']
+ gl.json_info = item
+ sha256_value = file['hashes'].get('SHA256', 'Unknown')
+
+ safe_tensor_found = False
+ pickle_tensor_found = False
+ if is_LORA and file_dict:
+ for file_info in file_dict:
+ file_format = file_info.get("format", "")
+ if "SafeTensor" in file_format:
+ safe_tensor_found = True
+ if "PickleTensor" in file_format:
+ pickle_tensor_found = True
+
+ if safe_tensor_found and pickle_tensor_found:
+ if "PickleTensor" in file_dict[0].get("format", ""):
+ if file_dict[0].get("sizeKB", 0) <= 100:
+ model_folder = os.path.join(contenttype_folder("TextualInversion"))
+
+ model_url = selected_version.get('downloadUrl', '')
+ model_main_url = f"https://civitai.com/models/{item['id']}"
+ img_html = ''
+
+ url = f"https://civitai.com/api/v1/model-versions/{selected_version['id']}"
+ api_version = request_civit_api(url)
+
+ for index, pic in enumerate(api_version['images']):
+
+ if from_preview:
+ index = f"preview_{index}"
+
+ class_name = 'class="model-block"'
+ if pic.get('nsfwLevel') >= 4:
+ class_name = 'class="civnsfw model-block"'
+
+ img_html += f'''
+
+
+
+
+
+ '''
+
+ if meta_button:
+ img_html += f'''
+
+
+
+ '''
+ else:
+ img_html += ''
+
+ if prompt_dict:
+ img_html += ''
+ # Define the preferred order of keys
+ preferred_order = ["prompt", "negativePrompt", "seed", "Size", "Model", "Clip skip", "sampler", "steps", "cfgScale"]
+ # Loop through the keys in the preferred order and add them to the HTML
+ for key in preferred_order:
+ if key in prompt_dict:
+ value = prompt_dict[key]
+ key_map = {
+ "prompt": "Prompt",
+ "negativePrompt": "Negative prompt",
+ "seed": "Seed",
+ "Size": "Size",
+ "Model": "Model",
+ "Clip skip": "Clip skip",
+ "sampler": "Sampler",
+ "steps": "Steps",
+ "cfgScale": "CFG scale"
+ }
+ key = key_map.get(key, key)
+
+ if meta_btn:
+ img_html += f''
+ else:
+ img_html += f''
+ # Check if there are remaining keys in meta
+ remaining_keys = [key for key in prompt_dict if key not in preferred_order]
+
+ # Add the rest
+ if remaining_keys:
+ img_html += f"""
+
+
+
+
+
+ """
+ for key in remaining_keys:
+ value = prompt_dict[key]
+ img_html += f''
+ img_html = img_html + ''
+
+ img_html += '
'
+
+ img_html = img_html + ''
+ img_html = img_html + ''\
+ f'{allow_svg if item.get("allowNoCredit") else deny_svg} Use the model without crediting the creator
'\
+ f'{allow_svg if "Image" in allowCommercialUse else deny_svg} Sell images they generate
'\
+ f'{allow_svg if "Rent" in allowCommercialUse else deny_svg} Run on services that generate images for money
'\
+ f'{allow_svg if "RentCivit" in allowCommercialUse else deny_svg} Run on Civitai
'\
+ f'{allow_svg if item.get("allowDerivatives") else deny_svg} Share merges using this model
'\
+ f'{allow_svg if "Sell" in allowCommercialUse else deny_svg} Sell this model or merges using this model
'\
+ f'{allow_svg if item.get("allowDifferentLicense") else deny_svg} Have different permissions when sharing merges'\
+ '
{escape(str(model_uploader))}{uploader_avatar}
' + else: + uploader = f'Uploaded by {escape(str(model_uploader))}{uploader_avatar}
' + output_html = f''' +{escape(str(model_name))}
+ {uploader} +-
+
- Version +
- {escape(str(model_version))} +
- Base Model +
- {escape(str(output_basemodel))} +
- CivitAI Tags +
- + + + {"
- Download Link " if model_url else ''} + {f'
- {model_url} ' if model_url else ''} +
Description
+ {model_desc} +Maybe the model doesn\'t exist on CivitAI?
Could not locate the model path.
The servers might be too busy or down if the issue persists." + elif input_string == "offline": + return div + "The CivitAI servers are currently offline.
Please try again later." + elif input_string == "no_items": + return div + "Failed to retrieve any models from CivitAI
The servers might be too busy or down if the issue persists." + else: + return div + "The CivitAI-API failed to respond due to an error.
Check the logs for more details." \ No newline at end of file diff --git a/extensions/sd-civitai-browser-plus/scripts/civitai_download.py b/extensions/sd-civitai-browser-plus/scripts/civitai_download.py new file mode 100644 index 0000000000000000000000000000000000000000..b7c1a9fa5c0b31b6ba69d8d08cc12ed6d1a209d1 --- /dev/null +++ b/extensions/sd-civitai-browser-plus/scripts/civitai_download.py @@ -0,0 +1,773 @@ +import requests +import gradio as gr +import time +import subprocess +import threading +import os +import re +import random +import platform +import stat +import json +import time +from pathlib import Path +from modules.shared import opts, cmd_opts +from scripts.civitai_global import print, debug_print +import scripts.civitai_global as gl +import scripts.civitai_api as _api +import scripts.civitai_file_manage as _file +try: + from zip_unicode import ZipHandler +except ImportError: + print("Python module 'ZipUnicode' has not been imported correctly, please try to restart or install it manually.") + +total_count = 0 +current_count = 0 +dl_manager_count = 0 + +def random_number(prev=None): + number = str(random.randint(10000, 99999)) + while number == prev: + number = str(random.randint(10000, 99999)) + + return number + +gl.init() +rpc_secret = "R7T5P2Q9K6" +try: + queue = not cmd_opts.no_gradio_queue +except AttributeError: + queue = not cmd_opts.disable_queue +except: + queue = True + +def start_aria2_rpc(): + start_file = os.path.join(aria2path, '_') + running_file = os.path.join(aria2path, 'running') + null = open(os.devnull, 'w') + + if os.path.exists(running_file): + try: + if os_type == 'Linux': + env = os.environ.copy() + env['PATH'] = '/usr/bin:' + env['PATH'] + subprocess.Popen("pkill aria2", shell=True, env=env) + else: + subprocess.Popen(stop_rpc, stdout=null, stderr=null) + time.sleep(1) + except Exception as e: + print(f"Failed to stop Aria2 RPC : {e}") + else: + if os.path.exists(start_file): + os.rename(start_file, running_file) + return + else: + with open(start_file, 'w', encoding="utf-8"): + pass + + try: + show_log = getattr(opts, "show_log", False) + aria2_flags = getattr(opts, "aria2_flags", "") + cmd = f'"{aria2}" --enable-rpc --rpc-listen-all --rpc-listen-port=24000 --rpc-secret {rpc_secret} --check-certificate=false --ca-certificate=" " --file-allocation=none {aria2_flags}' + subprocess_args = {'shell': True} + if not show_log: + subprocess_args.update({'stdout': subprocess.DEVNULL, 'stderr': subprocess.DEVNULL}) + + subprocess.Popen(cmd, **subprocess_args) + if os.path.exists(running_file): + print("Aria2 RPC restarted") + else: + print("Aria2 RPC started") + except Exception as e: + print(f"Failed to start Aria2 RPC server: {e}") + +aria2path = Path(__file__).resolve().parents[1] / "aria2" +os_type = platform.system() + +if os_type == 'Windows': + aria2 = os.path.join(aria2path, 'win', 'aria2.exe') + stop_rpc = "taskkill /im aria2.exe /f" + start_aria2_rpc() +elif os_type == 'Linux': + aria2 = os.path.join(aria2path, 'lin', 'aria2') + st = os.stat(aria2) + os.chmod(aria2, st.st_mode | stat.S_IEXEC) + stop_rpc = "pkill aria2" + start_aria2_rpc() + +class TimeOutFunction(Exception): + pass + +def create_model_item(dl_url, model_filename, install_path, model_name, version_name, model_sha256, model_id, create_json, from_batch=False): + global dl_manager_count + if model_id: + model_id = int(model_id) + if model_sha256: + model_sha256 = model_sha256.upper() + if model_sha256 == "UNKNOWN": + model_sha256 = None + + filtered_items = [] + + for item in gl.json_data['items']: + if int(item['id']) == int(model_id): + filtered_items.append(item) + content_type = item['type'] + desc = item['description'] + main_folder = _api.contenttype_folder(content_type, desc) + break + + sub_folder = os.path.normpath(os.path.relpath(install_path, main_folder)) + + model_json = {"items": filtered_items} + model_versions = _api.update_model_versions(model_id) + (preview_html,_,_,_,_,_,_,_,_,_,_,existing_path,_) = _api.update_model_info(None, model_versions.get('value'), False, model_id) + + for item in gl.download_queue: + if item['dl_url'] == dl_url: + return None + + dl_manager_count += 1 + + item = { + "dl_id": dl_manager_count, + "dl_url" : dl_url, + "model_filename" : model_filename, + "install_path" : install_path, + "model_name" : model_name, + "version_name" : version_name, + "model_sha256" : model_sha256, + "model_id" : model_id, + "create_json" : create_json, + "model_json" : model_json, + "model_versions" : model_versions, + "preview_html" : preview_html['value'], + "existing_path": existing_path['value'], + "from_batch" : from_batch, + "sub_folder" : sub_folder + } + + return item + +def selected_to_queue(model_list, subfolder, download_start, create_json, current_html): + global total_count, current_count + if gl.download_queue: + number = download_start + else: + number = random_number(download_start) + total_count = 0 + current_count = 0 + + model_list = json.loads(model_list) + + for model_string in model_list: + model_name, model_id = _api.extract_model_info(model_string) + for item in gl.json_data['items']: + if int(item['id']) == int(model_id): + model_id, desc, content_type = item['id'], item['description'], item['type'] + version = item.get('modelVersions', [])[0] + version_name = version.get('name') + files = version.get('files', []) + primary_file = next((file for file in files if file.get('primary', False)), None) + if primary_file: + model_filename = _api.cleaned_name(primary_file.get('name')) + model_sha256 = primary_file.get('hashes', {}).get('SHA256') + dl_url = primary_file.get('downloadUrl') + else: + model_filename = _api.cleaned_name(files[0].get('name')) + model_sha256 = files[0].get('hashes', {}).get('SHA256') + dl_url = files[0].get('downloadUrl') + break + + model_folder = _api.contenttype_folder(content_type, desc) + + sub_opt1 = os.path.join(os.sep, _api.cleaned_name(model_name)) + sub_opt2 = os.path.join(os.sep, _api.cleaned_name(model_name), _api.cleaned_name(version_name)) + + default_sub = _api.sub_folder_value(content_type, desc) + if default_sub == f"{os.sep}Model Name": + default_sub = sub_opt1 + elif default_sub == f"{os.sep}Model Name{os.sep}Version Name": + default_sub = sub_opt2 + + if subfolder and subfolder != "None" and subfolder != "Only available if the selected files are of the same model type": + from_batch = False + if platform.system() == "Windows": + subfolder = re.sub(r'[/:*?"<>|]', '', subfolder) + + if not subfolder.startswith(os.sep): + subfolder = os.sep + subfolder + install_path = model_folder + subfolder + else: + from_batch = True + if default_sub != "None": + install_path = model_folder + default_sub + else: + install_path = model_folder + + model_item = create_model_item(dl_url, model_filename, install_path, model_name, version_name, model_sha256, model_id, create_json, from_batch) + if model_item: + gl.download_queue.append(model_item) + total_count += 1 + + html = download_manager_html(current_html) + + return ( + gr.Button.update(interactive=False, visible=False), # Download Button + gr.Button.update(interactive=True, visible=True), # Cancel Button + gr.Button.update(interactive=True if len(gl.download_queue) > 1 else False, visible=True), # Cancel All Button + gr.Textbox.update(value=number), # Download Start Trigger + gr.HTML.update(value=''), # Download Progress + gr.HTML.update(value=html) # Download Manager HTML + ) + +def download_start(download_start, dl_url, model_filename, install_path, model_string, version_name, model_sha256, model_id, create_json, current_html): + global total_count, current_count + if model_string: + model_name, _ = _api.extract_model_info(model_string) + model_item = create_model_item(dl_url, model_filename, install_path, model_name, version_name, model_sha256, model_id, create_json) + + gl.download_queue.append(model_item) + + if len(gl.download_queue) > 1: + number = download_start + total_count += 1 + else: + number = random_number(download_start) + total_count = 1 + current_count = 0 + + html = download_manager_html(current_html) + + return ( + gr.Button.update(interactive=False, visible=True), # Download Button + gr.Button.update(interactive=True, visible=True), # Cancel Button + gr.Button.update(interactive=True if len(gl.download_queue) > 1 else False, visible=True), # Cancel All Button + gr.Textbox.update(value=number), # Download Start Trigger + gr.HTML.update(value=''), # Download Progress + gr.HTML.update(value=html) # Download Manager HTML + ) + +def download_finish(model_filename, version, model_id): + if model_id: + model_id = int(model_id) + model_versions = _api.update_model_versions(model_id) + else: + model_versions = None + if model_versions: + version_choices = model_versions.get('choices', []) + else: + version_choices = [] + prev_version = gl.last_version + " [Installed]" + + if prev_version in version_choices: + version = prev_version + Del = True + Down = False + else: + Del = False + Down = True + + if gl.cancel_status: + Del = False + Down = True + + gl.download_fail = False + gl.cancel_status = False + + return ( + gr.Button.update(interactive=model_filename, visible=Down, value="Download model"), # Download Button + gr.Button.update(interactive=False, visible=False), # Cancel Button + gr.Button.update(interactive=False, visible=False), # Cancel All Button + gr.Button.update(interactive=Del, visible=Del), # Delete Button + gr.HTML.update(value=''), # Download Progress + gr.Dropdown.update(value=version, choices=version_choices) # Version Dropdown + ) + +def download_cancel(): + gl.cancel_status = True + gl.download_fail = True + if gl.download_queue: + item = gl.download_queue[0] + + while True: + if not gl.isDownloading: + if item: + model_string = f"{item['model_name']} ({item['model_id']})" + _file.delete_model(0, item['model_filename'], model_string, item['version_name'], False, model_ver=item['model_versions'], model_json=item['model_json']) + break + else: + time.sleep(0.5) + return + +def download_cancel_all(): + gl.cancel_status = True + gl.download_fail = True + + if gl.download_queue: + item = gl.download_queue[0] + + while True: + if not gl.isDownloading: + if item: + model_string = f"{item['model_name']} ({item['model_id']})" + _file.delete_model(0, item['model_filename'], model_string, item['version_name'], False, model_ver=item['model_versions'], model_json=item['model_json']) + gl.download_queue = [] + break + else: + time.sleep(0.5) + return + +def convert_size(size): + for unit in ['bytes', 'KB', 'MB', 'GB']: + if size < 1024: + return f"{size:.2f} {unit}" + size /= 1024 + return f"{size:.2f} GB" + +def get_download_link(url, model_id): + headers = _api.get_headers(model_id) + proxies, ssl = _api.get_proxies() + + response = requests.get(url, headers=headers, allow_redirects=False, proxies=proxies, verify=ssl) + + if 300 <= response.status_code <= 308: + if "login?returnUrl" in response.text and "reason=download-auth" in response.text: + return "NO_API" + + download_link = response.headers["Location"] + return download_link + else: + return None + +def download_file(url, file_path, install_path, model_id, progress=gr.Progress() if queue else None): + try: + disable_dns = getattr(opts, "disable_dns", False) + split_aria2 = getattr(opts, "split_aria2", 64) + max_retries = 5 + gl.download_fail = False + aria2_rpc_url = "http://localhost:24000/jsonrpc" + + file_name = os.path.basename(file_path) + + download_link = get_download_link(url, model_id) + if not download_link: + print(f'File: "{file_name}" not found on CivitAI servers, it looks like the file is not available for download.') + gl.download_fail = True + return + + elif download_link == "NO_API": + print(f'File: "{file_name}" requires a personal CivitAI API to be downloaded, you can set your own API key in the CivitAI Browser+ settings in the SD-WebUI settings tab') + gl.download_fail = "NO_API" + if progress != None: + progress(0, desc=f'File: "{file_name}" requires a personal CivitAI API to be downloaded, you can set your own API key in the CivitAI Browser+ settings in the SD-WebUI settings tab') + time.sleep(5) + return + + if os.path.exists(file_path): + os.remove(file_path) + + if disable_dns: + dns = "false" + else: + dns = "true" + + options = { + "dir": install_path, + "max-connection-per-server": str(f"{split_aria2}"), + "split": str(f"{split_aria2}"), + "async-dns": dns, + "out": file_name + } + + payload = json.dumps({ + "jsonrpc": "2.0", + "id": "1", + "method": "aria2.addUri", + "params": ["token:" + rpc_secret, [download_link], options] + }) + + try: + response = requests.post(aria2_rpc_url, data=payload) + data = json.loads(response.text) + if 'result' not in data: + raise ValueError(f'Failed to start download: {data}') + gid = data['result'] + except Exception as e: + print(f"Failed to start download: {e}") + gl.download_fail = True + return + + while True: + if gl.cancel_status: + payload = json.dumps({ + "jsonrpc": "2.0", + "id": "1", + "method": "aria2.remove", + "params": ["token:" + rpc_secret, gid] + }) + requests.post(aria2_rpc_url, data=payload) + if progress != None: + progress(0, desc=f"Download cancelled.") + return + + try: + payload = json.dumps({ + "jsonrpc": "2.0", + "id": "1", + "method": "aria2.tellStatus", + "params": ["token:" + rpc_secret, gid] + }) + + response = requests.post(aria2_rpc_url, data=payload) + status_info = json.loads(response.text)['result'] + + total_length = int(status_info['totalLength']) + completed_length = int(status_info['completedLength']) + download_speed = int(status_info['downloadSpeed']) + + progress_percent = (completed_length / total_length) * 100 if total_length else 0 + + remaining_size = total_length - completed_length + if download_speed > 0: + eta_seconds = remaining_size / download_speed + eta_formatted = time.strftime("%H:%M:%S", time.gmtime(eta_seconds)) + else: + eta_formatted = "XX:XX:XX" + if progress != None: + progress(progress_percent / 100, desc=f"Downloading: {file_name} - {convert_size(completed_length)}/{convert_size(total_length)} - Speed: {convert_size(download_speed)}/s - ETA: {eta_formatted} - Queue: {current_count}/{total_count}") + + if status_info['status'] == 'complete': + print(f"Model saved to: {file_path}") + if progress != None: + progress(1, desc=f"Model saved to: {file_path}") + gl.download_fail = False + return + + if status_info['status'] == 'error': + if progress != None: + progress(0, desc=f"Encountered an error during download of: \"{file_name}\" Please try again.") + gl.download_fail = True + return + + time.sleep(0.25) + + except Exception as e: + print(f"Error occurred during Aria2 status update: {e}") + max_retries -= 1 + if max_retries == 0: + if progress != None: + progress(0, desc=f"Encountered an error during download of: \"{file_name}\" Please try again.") + gl.download_fail = True + return + time.sleep(5) + except: + if progress != None: + progress(0, desc=f"Encountered an error during download of: \"{file_name}\" Please try again.") + gl.download_fail = True + if os.path.exists(file_path): + os.remove(file_path) + time.sleep(5) + +def info_to_json(install_path, model_id, model_sha256, unpackList=None): + json_file = os.path.splitext(install_path)[0] + ".json" + if os.path.exists(json_file): + try: + with open(json_file, 'r', encoding="utf-8") as f: + data = json.load(f) + except Exception as e: + print(f"Failed to open {json_file}: {e}") + else: + data = {} + + data['modelId'] = model_id + data['sha256'] = model_sha256 + if unpackList: + data['unpackList'] = unpackList + + with open(json_file, 'w', encoding="utf-8") as f: + json.dump(data, f, indent=4) + +def download_file_old(url, file_path, model_id, progress=gr.Progress() if queue else None): + try: + gl.download_fail = False + max_retries = 5 + if os.path.exists(file_path): + os.remove(file_path) + + downloaded_size = 0 + tokens = re.split(re.escape(os.sep), file_path) + file_name_display = tokens[-1] + start_time = time.time() + last_update_time = 0 + update_interval = 0.25 + + download_link = get_download_link(url, model_id) + if not download_link: + print(f'File: "{file_name_display}" not found on CivitAI servers, it looks like the file is not available for download.') + if progress != None: + progress(0, desc=f'File: "{file_name_display}" not found on CivitAI servers, it looks like the file is not available for download.') + time.sleep(5) + gl.download_fail = True + return + + elif download_link == "NO_API": + print(f'File: "{file_name_display}" requires a personal CivitAI API key to be downloaded, you can set your own API key in the CivitAI Browser+ settings in the SD-WebUI settings tab') + gl.download_fail = "NO_API" + if progress != None: + progress(0, desc=f'File: "{file_name_display}" requires a personal CivitAI API key to be downloaded, you can set your own API key in the CivitAI Browser+ settings in the SD-WebUI settings tab') + time.sleep(5) + return + + headers = _api.get_headers(model_id, True) + proxies, ssl = _api.get_proxies() + + while True: + if gl.cancel_status: + if progress != None: + progress(0, desc=f"Download cancelled.") + return + if os.path.exists(file_path): + downloaded_size = os.path.getsize(file_path) + headers['Range'] = f"bytes={downloaded_size}-" + + with open(file_path, "ab") as f: + while gl.isDownloading: + try: + if gl.cancel_status: + if progress != None: + progress(0, desc=f"Download cancelled.") + return + try: + if gl.cancel_status: + if progress != None: + progress(0, desc=f"Download cancelled.") + return + response = requests.get(download_link, headers=headers, stream=True, timeout=10, proxies=proxies, verify=ssl) + if response.status_code == 404: + if progress != None: + progress(0, desc=f"Encountered an error during download of: {file_name_display}, file is not found on CivitAI servers.") + gl.download_fail = True + return + total_size = int(response.headers.get("Content-Length", 0)) + except: + raise TimeOutFunction("Timed Out") + + if total_size == 0: + total_size = downloaded_size + + for chunk in response.iter_content(chunk_size=1024): + if chunk: + if gl.cancel_status: + if progress != None: + progress(0, desc=f"Download cancelled.") + return + f.write(chunk) + downloaded_size += len(chunk) + elapsed_time = time.time() - start_time + download_speed = downloaded_size / elapsed_time + remaining_size = total_size - downloaded_size + if download_speed > 0: + eta_seconds = remaining_size / download_speed + eta_formatted = time.strftime("%H:%M:%S", time.gmtime(eta_seconds)) + else: + eta_formatted = "XX:XX:XX" + current_time = time.time() + if current_time - last_update_time >= update_interval: + if progress != None: + progress(downloaded_size / total_size, desc=f"Downloading: {file_name_display} {convert_size(downloaded_size)} / {convert_size(total_size)} - Speed: {convert_size(int(download_speed))}/s - ETA: {eta_formatted} - Queue: {current_count}/{total_count}") + last_update_time = current_time + if gl.isDownloading == False: + response.close + break + downloaded_size = os.path.getsize(file_path) + break + + except TimeOutFunction: + if progress != None: + progress(0, desc="CivitAI API did not respond, retrying...") + max_retries -= 1 + if max_retries == 0: + if progress != None: + progress(0, desc=f"Encountered an error during download of: {file_name_display}, please try again.") + gl.download_fail = True + return + time.sleep(5) + + if (gl.isDownloading == False): + break + + gl.isDownloading = False + downloaded_size = os.path.getsize(file_path) + if downloaded_size >= total_size: + if not gl.cancel_status: + print(f"Model saved to: {file_path}") + if progress != None: + progress(1, desc=f"Model saved to: {file_path}") + gl.download_fail = False + return + + else: + if progress != None: + progress(0, desc=f"Encountered an error during download of: {file_name_display}, please try again.") + print(f"File download failed: {file_name_display}") + gl.download_fail = True + if os.path.exists(file_path): + os.remove(file_path) + except: + if progress != None: + progress(0, desc=f"Encountered an error during download of: {file_name_display}, please try again.") + gl.download_fail = True + if os.path.exists(file_path): + os.remove(file_path) + time.sleep(5) + +def download_create_thread(download_finish, queue_trigger, progress=gr.Progress() if queue else None): + global current_count + current_count += 1 + if not gl.download_queue: + return ( + gr.HTML.update(), # Download Progress HTML + gr.Textbox.update(value=None), # Current Model + gr.Textbox.update(value=random_number(download_finish)), # Download Finish Trigger + gr.Textbox.update(value=queue_trigger), # Queue Trigger + gr.Button.update(interactive=False) # Cancel All Button + ) + item = gl.download_queue[0] + gl.cancel_status = False + use_aria2 = getattr(opts, "use_aria2", True) + unpack_zip = getattr(opts, "unpack_zip", False) + save_all_images = getattr(opts, "auto_save_all_img", False) + gl.recent_model = item['model_name'] + gl.last_version = item['version_name'] + + if item['from_batch']: + item['install_path'] = item['existing_path'] + + gl.isDownloading = True + _file.make_dir(item['install_path']) + + path_to_new_file = os.path.join(item['install_path'], item['model_filename']) + + if use_aria2 and os_type != 'Darwin': + thread = threading.Thread(target=download_file, args=(item['dl_url'], path_to_new_file, item['install_path'], item['model_id'], progress)) + else: + thread = threading.Thread(target=download_file_old, args=(item['dl_url'], path_to_new_file, item['model_id'], progress)) + thread.start() + thread.join() + + if not gl.cancel_status or gl.download_fail: + if os.path.exists(path_to_new_file): + unpackList = [] + if unpack_zip: + try: + if path_to_new_file.endswith('.zip'): + directory = Path(os.path.dirname(path_to_new_file)) + zip_handler = ZipHandler(path_to_new_file) + + for _, decoded_name in zip_handler.name_map.items(): + unpackList.append(decoded_name) + + zip_handler.extract_all(directory) + zip_handler.zip_ref.close() + + print(f"Successfully extracted {item['model_filename']} to {directory}") + os.remove(path_to_new_file) + except ImportError: + print("Python module 'ZipUnicode' has not been imported correctly, cannot extract zip file. Please try to restart or install it manually.") + except Exception as e: + print(f"Failed to extract {item['model_filename']} with error: {e}") + if not gl.cancel_status: + if item['create_json']: + _file.save_model_info(item['install_path'], item['model_filename'], item['sub_folder'], item['model_sha256'], item['preview_html'], api_response=item['model_json']) + info_to_json(path_to_new_file, item['model_id'], item['model_sha256'], unpackList) + _file.save_preview(path_to_new_file, item['model_json'], True, item['model_sha256']) + if save_all_images: + _file.save_images(item['preview_html'], item['model_filename'], item['install_path'], item['sub_folder'], api_response=item['model_json']) + + base_name = os.path.splitext(item['model_filename'])[0] + base_name_preview = base_name + '.preview' + + if gl.download_fail: + for root, dirs, files in os.walk(item['install_path'], followlinks=True): + for file in files: + file_base_name = os.path.splitext(file)[0] + if file_base_name == base_name or file_base_name == base_name_preview: + path_file = os.path.join(root, file) + os.remove(path_file) + + if gl.cancel_status: + print(f'Cancelled download of "{item["model_filename"]}"') + else: + if not gl.download_fail == "NO_API": + print(f'Error occured during download of "{item["model_filename"]}"') + + if gl.cancel_status: + card_name = None + else: + model_string = f"{item['model_name']} ({item['model_id']})" + (card_name, _, _) = _file.card_update(item['model_versions'], model_string, item['version_name'], True) + + if len(gl.download_queue) != 0: + gl.download_queue.pop(0) + gl.isDownloading = False + time.sleep(2) + + if len(gl.download_queue) == 0: + finish_nr = random_number(download_finish) + queue_nr = queue_trigger + else: + finish_nr = download_finish + queue_nr = random_number(queue_trigger) + + return ( + gr.HTML.update(), # Download Progress HTML + gr.Textbox.update(value=card_name), # Current Model + gr.Textbox.update(value=finish_nr), # Download Finish Trigger + gr.Textbox.update(value=queue_nr), # Queue Trigger + gr.Button.update(interactive=True if len(gl.download_queue) > 1 else False) # Cancel All Button + ) + +def remove_from_queue(dl_id): + global total_count + for item in gl.download_queue: + if int(dl_id) == int(item['dl_id']): + gl.download_queue.remove(item) + total_count -= 1 + return + +def arrange_queue(input): + id_and_index = input.split('.') + dl_id = int(id_and_index[0]) + index = int(id_and_index[1]) + 1 + for item in gl.download_queue: + if int(item['dl_id']) == dl_id: + current_item = gl.download_queue.pop(gl.download_queue.index(item)) + gl.download_queue.insert(index, current_item) + break + +def get_style(size, left_border): + return f"flex-grow: {size};" + ("border-left: 1px solid var(--border-color-primary);" if left_border else "") + "padding: 5px 10px 5px 10px;width: 0;align-self: center;" + +def download_manager_html(current_html): + html = current_html.rsplit("", 1)[0] + pattern = r'dl_id="(\d+)"' + matches = re.findall(pattern, html) + existing_item_ids = [int(match) for match in matches] + + for item in gl.download_queue: + if not item['dl_id'] in existing_item_ids: + download_item = f''' +
Please press the button above to load the models into the browser tab
Please press the button above to load the models into the browser tab
Use the filter icon to filter results.
Use the filter icon to filter results.
 +
+`Danbooru Tags Upsampler` と書かれたアコーディオンを開き、`Enabled` チェックボックスにチェックをいれることで拡張機能を有効化できます。
+
+パラメーターの説明:
+
+| パラメーター名 | 説明 | 例 |
+| -------------- | ----------- | ------------- |
+| **Total tag length** | これは **タグの補完後のプロンプト内のタグの総量を指定します**。 補完するタグの量ではありません。 `very short` は「タグ10個以下」, `short` は「タグ20個以下」, `long` は「タグ40個以下」、 `very long` は「それよりも多い」を意味します。 | 推奨は `long` です |
+| **Ban tags** | ここで指定された全てのタグは補完時に出現しなくなります。出てきて欲しくないタグがあるときに便利です。`*` は全ての文字列にマッチします。(例: `* background` は `simple background`、`white background` 等にマッチします) | `official alternate costume, english text, * background, ...` |
+| **Seed for upsampling tags** | この値とポジティブプロンプトが固定された場合、補完されるタグも固定されます。`-1` は毎回ことなるシードで補完することを意味します。 | 毎回異なる補完をしてほしい場合は `-1` に設定します。 |
+| **Upsampling timing** | sd-dynamic-prompts や webui の styles 機能などの、他のプロンプト加工処理が実行される前にアップサンプルするか、後にアップサンプルするかどうかです。 | `After applying other prompt processing` |
+| **Variety level** | このパラメーターは `Generation config` のプリセットです。アップサンプルされるタグの多様度を指定できます。 | `varied` |
+| **Generation config** | タグの生成に利用される LLM のパラメーターです。言語モデルの生成パラメーターに詳しくない場合は触らず、 `Variety level` を使うことをおすすめします。 ||
+
+## ショーケース
+
+
+
+`Danbooru Tags Upsampler` と書かれたアコーディオンを開き、`Enabled` チェックボックスにチェックをいれることで拡張機能を有効化できます。
+
+パラメーターの説明:
+
+| パラメーター名 | 説明 | 例 |
+| -------------- | ----------- | ------------- |
+| **Total tag length** | これは **タグの補完後のプロンプト内のタグの総量を指定します**。 補完するタグの量ではありません。 `very short` は「タグ10個以下」, `short` は「タグ20個以下」, `long` は「タグ40個以下」、 `very long` は「それよりも多い」を意味します。 | 推奨は `long` です |
+| **Ban tags** | ここで指定された全てのタグは補完時に出現しなくなります。出てきて欲しくないタグがあるときに便利です。`*` は全ての文字列にマッチします。(例: `* background` は `simple background`、`white background` 等にマッチします) | `official alternate costume, english text, * background, ...` |
+| **Seed for upsampling tags** | この値とポジティブプロンプトが固定された場合、補完されるタグも固定されます。`-1` は毎回ことなるシードで補完することを意味します。 | 毎回異なる補完をしてほしい場合は `-1` に設定します。 |
+| **Upsampling timing** | sd-dynamic-prompts や webui の styles 機能などの、他のプロンプト加工処理が実行される前にアップサンプルするか、後にアップサンプルするかどうかです。 | `After applying other prompt processing` |
+| **Variety level** | このパラメーターは `Generation config` のプリセットです。アップサンプルされるタグの多様度を指定できます。 | `varied` |
+| **Generation config** | タグの生成に利用される LLM のパラメーターです。言語モデルの生成パラメーターに詳しくない場合は触らず、 `Variety level` を使うことをおすすめします。 ||
+
+## ショーケース
+
+| 入力のプロンプト | +アップサンプルなし | +アップサンプルあり | +
| 1girl, solo, cowboy shot (seed: 2396487241) | +
+  +
+ |
+  |
+
| (最終的なプロンプト) | +1girl, solo, cowboy shot | +1girl, solo, cowboy shot, ahoge, animal ears, bare shoulders, blue hair, blush, closed mouth, collarbone, collared shirt, dress, eyelashes, fox ears, fox girl, fox tail, hair between eyes, heart, long hair, long sleeves, looking at viewer, neck ribbon, ribbon, shirt, simple background, sleeves past wrists, smile, tail, white background, white dress, white shirt, yellow eyes | +
| 3girls (seed: 684589178) | +
+  +
+ |
+  |
+
| (最終的なプロンプト) | +3girls | +3girls, black footwear, black hair, black thighhighs, boots, bow, bowtie, chibi, closed mouth, collared shirt, flower, grey hair, hair between eyes, hair flower, hair ornament, long hair, long sleeves, looking at viewer, multiple girls, purple eyes, red eyes, shirt, short hair, sitting, smile, thighhighs, vest, white shirt, white skirt | +
| no humans, scenery (seed: 3702717413) | +
+  +
+ |
+  |
+
| (最終的なプロンプト) | +no humans, scenery | +no humans, scenery, animal, animal focus, bird, blue eyes, cat, dog, flower, grass, leaf, nature, petals, shadow, sitting, star (sky), sunflower, tree | +
| 1girl, frieren, sousou no frieren + (seed: 787304393) | +
+  +
+ |
+  |
+
| (最終的なプロンプト) | +1girl, frieren, sousou no frieren | +1girl, frieren, sousou no frieren, black pantyhose, cape, closed mouth, elf, fingernails, green eyes, grey hair, hair between eyes, long hair, long sleeves, looking at viewer, pantyhose, pointy ears, simple background, skirt, solo, twintails, white background, white skirt | +
| 入力プロンプト | +Very unvaried | +Unvaried | +Normal | +Varied | +Very varied | +
| 1girl, solo, from side | + |
+  |
+  |
+  |
+  |
+
| 1girl, frieren, sousou no frieren, | + |
+  |
+  |
+  |
+  |
+
| no humans, scenery | + |
+  |
+  |
+  |
+  |
+
+
+Open the `Danbooru Tags Upsampler` accordion and check the `Enabled` checkbox to enable this extension.
+
+Explanation of parameters:
+
+| Parameter name | Description | Example value |
+| -------------- | ----------- | ------------- |
+| **Total tag length** | This parameter can specify the amount of **total tags after completing the positive prompt**. Not the amount of completing tags. `very short` means "less than 10 tags", `short` means "less than 20 tags", `long` means "less than 40 tags" and `very long` is more than that. | `long` is recommended |
+| **Ban tags** | All tags in this field will never appear in completion tags. It's useful when you don't want to contain some specific tags. Using `*` maches to any character. (e.g. `* background` matches to `simple background`, `white background`, ...) | `official alternate costume, english text, * background, ...` |
+| **Seed for upsampling tags** | If this number and the positive prompt are fixed, the completion tags are also fixed. `-1` means "generates tags using random seed every time" | If you want to generate images with different final prompts every time, set to `-1`. |
+| **Upsampling timing** | When to upsample, before or after other prompt processing (e.g. sd-dynamic-prompts or webui's styles feature) are applied. | `After applying other prompt processings` |
+| **Variety level** | These parameters are presets of the `Generation config`. This can change the variety of upsampled tags. | `varied` |
+| **Generation config** | LLM parameters of generating tags. It's recommended not to touch if you are not familiar with language model's generation parameters, and use `Variety level` option instead. ||
+
+ +
+
+## Showcases
+
+
+
+
+## Showcases
+
+| Input prompt | +Without upsampling | +With upsampling | +
| 1girl, solo, cowboy shot (seed: 2396487241) | +
+
+ |
+ |
+
| (prompts used to generate) | +1girl, solo, cowboy shot | +1girl, solo, cowboy shot, ahoge, animal ears, bare shoulders, blue hair, blush, closed mouth, collarbone, collared shirt, dress, eyelashes, fox ears, fox girl, fox tail, hair between eyes, heart, long hair, long sleeves, looking at viewer, neck ribbon, ribbon, shirt, simple background, sleeves past wrists, smile, tail, white background, white dress, white shirt, yellow eyes | +
| 3girls (seed: 684589178) | +
+
+ |
+ |
+
| (prompts used to generate) | +3girls | +3girls, black footwear, black hair, black thighhighs, boots, bow, bowtie, chibi, closed mouth, collared shirt, flower, grey hair, hair between eyes, hair flower, hair ornament, long hair, long sleeves, looking at viewer, multiple girls, purple eyes, red eyes, shirt, short hair, sitting, smile, thighhighs, vest, white shirt, white skirt | +
| no humans, scenery (seed: 3702717413) | +
+
+ |
+ |
+
| (prompts used to generate) | +no humans, scenery | +no humans, scenery, animal, animal focus, bird, blue eyes, cat, dog, flower, grass, leaf, nature, petals, shadow, sitting, star (sky), sunflower, tree | +
| 1girl, frieren, sousou no frieren + (seed: 787304393) | +
+
+ |
+ |
+
| (prompts used to generate) | +1girl, frieren, sousou no frieren | +1girl, frieren, sousou no frieren, black pantyhose, cape, closed mouth, elf, fingernails, green eyes, grey hair, hair between eyes, long hair, long sleeves, looking at viewer, pantyhose, pointy ears, simple background, skirt, solo, twintails, white background, white skirt | +
| Input prompt | +Very unvaried | +Unvaried | +Normal | +Varied | +Very varied | +
| 1girl, solo, from side | + |
+ |
+ |
+ |
+ |
+
| 1girl, frieren, sousou no frieren, | + |
+ |
+ |
+ |
+ |
+
| no humans, scenery | + |
+ |
+ |
+ |
+ |
+
[Stable Diffusion WebUI](https://github.com/AUTOMATIC1111/stable-diffusion-webui)
+and [Forge](https://github.com/lllyasviel/stable-diffusion-webui-forge)+The extension uses a dynamically loaded
[ExifReader](https://github.com/mattiasw/ExifReader) library module to extract image metadata locally.+Eliminating the need to upload it to a server, resulting in Fast PNG Info.
+This is particularly noticeable when running the webui on online services, such as Google Colab, Kaggle, SageMaker Studio Lab, etc.
+ +Support: +- PNG parameters +- JPEG and Avif userComment +- Novel AI parameters with brackets conversion + +# Preview + +
+  +
+
+
'); + inputs = inputs.replace(/Negative prompt:/, neg).replace(/Steps:/, match => prm + match); + inputs = inputs.replace(/, Hashes:/, ciH); + + if (EnCrypt && EnCrypt.trim() !== '') { + inputs += `
${eNC}${EnCrypt}`; + } + if (EPwdSha && EPwdSha.trim() !== '') { + inputs += `
${pWD}${EPwdSha}`; + } + if (SfwNAI && SfwNAI.trim() !== '') { + inputs += `
${sFW}${SfwNAI}`; + } + if (SrcNAI && SrcNAI.trim() !== '') { + inputs += `
${sRC}${SrcNAI}`; + } + } + + return `
${inputs}
 +
+ 


 +
+## 图像搜索
+
+在第一次使用时,你需要点击等待索引的生成,我2万张图像的情况下大概需要15秒(配置是amd 5600x和pcie ssd)。后续使用他会检查文件夹是否发生变化,如果发生变化则需要重新生成索引,通常这个过程极快。
+
+图像搜索支持翻译,具体看这个 https://github.com/zanllp/sd-webui-infinite-image-browsing/issues/39 。
+
+
+## 图像搜索
+
+在第一次使用时,你需要点击等待索引的生成,我2万张图像的情况下大概需要15秒(配置是amd 5600x和pcie ssd)。后续使用他会检查文件夹是否发生变化,如果发生变化则需要重新生成索引,通常这个过程极快。
+
+图像搜索支持翻译,具体看这个 https://github.com/zanllp/sd-webui-infinite-image-browsing/issues/39 。
+ +## 图像比较
+
+
+
+## 全屏预览 (并排布局)
+
+
+## 全屏预览
+
+## 图像比较
+
+
+
+## 全屏预览 (并排布局)
+
+
+## 全屏预览
+ +
+在全屏预览下同样可以查看图片信息和进行上下文菜单上的的操作,支持拖拽/调整/展开收起
+
+https://user-images.githubusercontent.com/25872019/235327735-bfb50ea7-7682-4e50-b303-38159456e527.mp4
+
+
+如果你和我一样不需要查看生成信息,你可以选择直接缩小这个面板,所有上下文操作仍然可用
+
+
+
+在全屏预览下同样可以查看图片信息和进行上下文菜单上的的操作,支持拖拽/调整/展开收起
+
+https://user-images.githubusercontent.com/25872019/235327735-bfb50ea7-7682-4e50-b303-38159456e527.mp4
+
+
+如果你和我一样不需要查看生成信息,你可以选择直接缩小这个面板,所有上下文操作仍然可用
+
+ +
+也可以通过右上角的图标来触发
+
+
+也可以通过右上角的图标来触发
+ +
+
diff --git a/extensions/sd-webui-infinite-image-browsing/README.md b/extensions/sd-webui-infinite-image-browsing/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..59c152e20482d84eea3fd252f320407177abdf38
--- /dev/null
+++ b/extensions/sd-webui-infinite-image-browsing/README.md
@@ -0,0 +1,176 @@
+> 🌍 i18n Advisory: Some translations may be incomplete or inaccurate. Pull requests are welcome for improvements!
+
+> 🌐 Try our application online at: http://39.105.110.128:0721. This is my idle 2c2g3m cloud server without CDN.
+
+[中文文档](./README-zh.md)
+[Change log](https://github.com/zanllp/sd-webui-infinite-image-browsing/wiki/Change-log)
+[Installation / Running](#installation--running)
+
+
+# Stable Diffusion webui Infinite Image Browsing
+
+### Software Support and Development Progress Overview
+| Software | Support | Provided by |
+| ---------------------- | ---------------- | ----------- |
+| Stable Diffusion web UI| Supported | Built-in |
+| ComfyUI | Partially supported | Built-in |
+| Fooocus | Supported | Built-in |
+| NovelAI | Supported | Built-in |
+| StableSwarmUI | Supported | Built-in |
+| Pixiv | Supported | [pixiv_iib_plugin](https://github.com/zanllp/pixiv_iib_plugin) |
+
+If you would like to support more software, please refer to: [parsers](https://github.com/zanllp/sd-webui-infinite-image-browsing/tree/main/scripts/iib/parsers) or [pixiv_iib_plugin](https://github.com/zanllp/pixiv_iib_plugin)
+
+## Key Features
+
+### 🔥 Excellent Performance
+- Once caching is generated, images can be displayed in just a few milliseconds.
+- Images are displayed with thumbnails by default, with a default size of 512 pixels. You can adjust the thumbnail resolution on the global settings page.
+- You can also control the width of the grid images, allowing them to be displayed in widths ranging from 64px to 1024px.
+- Supports pre-generating thumbnails and video covers to improve performance using `--generate_video_cover` and `--generate_image_cache`.
+- Supports specifying the cache directory through the `IIB_CACHE_DIR` environment variable.
+
+### 🔍 Image Search & Favorite
+- The prompt, model, Lora, and other information will be converted into tags and sorted by frequency of use for precise searching.
+- Supports tag autocomplete, [auto-translation](https://github.com/zanllp/sd-webui-infinite-image-browsing/issues/39), and customization.
+- Image favorite can be achieved by toggling custom tags for images in the right-click menu.
+- Support for advanced search similar to Google
+- Also supports fuzzy search, you can search by a part of the filename or generated information.
+- Support adding custom search paths for easy management of folders created by the user.
+
+### 🖼️ View Images/Videos & `Send To`
+- Supports viewing image generation information. Also supported in full-screen preview mode.
+- Supports sending images to other tabs and third-party extensions such as ControlNet , openOutpaint.
+- Support full-screen preview and enable custom shortcut key operations while in full-screen preview mode.
+- Support navigating to the previous or next image in full-screen preview mode by pressing arrow keys or clicking buttons.
+- Support playing video files from a remote server.
+
+### 💻 Multiple Usage Methods
+- You can install it as an extension on SD-webui.
+- You can run it independently using Python.
+- The desktop app version is also available.
+- Supports multiple popular AI software.
+
+
+### 🚶♀️ Walk Mode
+- Automatically load the next folder `(similar to os.walk)`, allowing you to browse all images without paging.
+- Tested to work properly with over 27,000 files.
+- When there are folders, you can switch to walk mode from other modes by clicking the walk button in the upper right corner. It will flatten all the folders, avoiding the tedious operation of going in and out of folders.
+
+### 🌳 Preview based on File Tree Structure & File operations
+- Supports file tree-based preview.
+- Supports automatic refreshing.
+- Supports basic file operations, such as multiple selection for deleting/moving/copying, and creating new folders.
+- Hold down the Ctrl, Shift, or Cmd key to select multiple items.
+ - Supported multi-select operations include: delete, move, copy, pack download, add tags, remove tags, move to another folder, copy to another folder, drag and drop.
+ - You can keep the multi-select state by clicking the "Keep Multi-Select" button in the lower right corner, allowing you to perform multiple operations on the selected file collection conveniently.
+
+### 🆚 image comparison (similar to Imgsli)
+- Provides a side-by-side comparison of two images.
+- Provides a comparison of image generation information at the same time.
+
+### 🌐 Multilingual Support
+- Currently supports Simplified Chinese/Traditional Chinese/English/German.
+- If you would like to add a new language, please refer to [i18n.ts](https://github.com/zanllp/sd-webui-infinite-image-browsing/blob/main/vue/src/i18n/zh-hans.ts) and submit the relevant code.
+
+### 🔐 Privacy and Security
+- Supports custom secret key for authentication.
+- Supports configuring access control for the file system, which will be enabled by default when the service allows public access (Only when used as an extension of sd-webui).
+- Supports customizing the allowed paths for access control.
+- Supports controlling access permissions. You can run IIB in read-only mode.
+- [Click here to see details](.env.example)
+
+
+### 📦 Packaging/Batch Download
+- Allows you to download multiple images at once.
+- The data source can be search results, a regular image grid view page, walk mode, etc. Images can be added to the processing list through drag-and-drop or "Send To".
+### ⌨️ Keyboard Shortcuts
+- Allows for deleting and adding/removing tags, with customizable trigger buttons in the global settings page.
+
+
+If you like this project and find it helpful, please consider giving it a ⭐️. This would be very important for me to continue developing and maintaining this project. If you have any suggestions or ideas, please feel free to raise them in the issue section, and I will respond as soon as possible. Thank you again for your support!
+
+
+
+
+
diff --git a/extensions/sd-webui-infinite-image-browsing/README.md b/extensions/sd-webui-infinite-image-browsing/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..59c152e20482d84eea3fd252f320407177abdf38
--- /dev/null
+++ b/extensions/sd-webui-infinite-image-browsing/README.md
@@ -0,0 +1,176 @@
+> 🌍 i18n Advisory: Some translations may be incomplete or inaccurate. Pull requests are welcome for improvements!
+
+> 🌐 Try our application online at: http://39.105.110.128:0721. This is my idle 2c2g3m cloud server without CDN.
+
+[中文文档](./README-zh.md)
+[Change log](https://github.com/zanllp/sd-webui-infinite-image-browsing/wiki/Change-log)
+[Installation / Running](#installation--running)
+
+
+# Stable Diffusion webui Infinite Image Browsing
+
+### Software Support and Development Progress Overview
+| Software | Support | Provided by |
+| ---------------------- | ---------------- | ----------- |
+| Stable Diffusion web UI| Supported | Built-in |
+| ComfyUI | Partially supported | Built-in |
+| Fooocus | Supported | Built-in |
+| NovelAI | Supported | Built-in |
+| StableSwarmUI | Supported | Built-in |
+| Pixiv | Supported | [pixiv_iib_plugin](https://github.com/zanllp/pixiv_iib_plugin) |
+
+If you would like to support more software, please refer to: [parsers](https://github.com/zanllp/sd-webui-infinite-image-browsing/tree/main/scripts/iib/parsers) or [pixiv_iib_plugin](https://github.com/zanllp/pixiv_iib_plugin)
+
+## Key Features
+
+### 🔥 Excellent Performance
+- Once caching is generated, images can be displayed in just a few milliseconds.
+- Images are displayed with thumbnails by default, with a default size of 512 pixels. You can adjust the thumbnail resolution on the global settings page.
+- You can also control the width of the grid images, allowing them to be displayed in widths ranging from 64px to 1024px.
+- Supports pre-generating thumbnails and video covers to improve performance using `--generate_video_cover` and `--generate_image_cache`.
+- Supports specifying the cache directory through the `IIB_CACHE_DIR` environment variable.
+
+### 🔍 Image Search & Favorite
+- The prompt, model, Lora, and other information will be converted into tags and sorted by frequency of use for precise searching.
+- Supports tag autocomplete, [auto-translation](https://github.com/zanllp/sd-webui-infinite-image-browsing/issues/39), and customization.
+- Image favorite can be achieved by toggling custom tags for images in the right-click menu.
+- Support for advanced search similar to Google
+- Also supports fuzzy search, you can search by a part of the filename or generated information.
+- Support adding custom search paths for easy management of folders created by the user.
+
+### 🖼️ View Images/Videos & `Send To`
+- Supports viewing image generation information. Also supported in full-screen preview mode.
+- Supports sending images to other tabs and third-party extensions such as ControlNet , openOutpaint.
+- Support full-screen preview and enable custom shortcut key operations while in full-screen preview mode.
+- Support navigating to the previous or next image in full-screen preview mode by pressing arrow keys or clicking buttons.
+- Support playing video files from a remote server.
+
+### 💻 Multiple Usage Methods
+- You can install it as an extension on SD-webui.
+- You can run it independently using Python.
+- The desktop app version is also available.
+- Supports multiple popular AI software.
+
+
+### 🚶♀️ Walk Mode
+- Automatically load the next folder `(similar to os.walk)`, allowing you to browse all images without paging.
+- Tested to work properly with over 27,000 files.
+- When there are folders, you can switch to walk mode from other modes by clicking the walk button in the upper right corner. It will flatten all the folders, avoiding the tedious operation of going in and out of folders.
+
+### 🌳 Preview based on File Tree Structure & File operations
+- Supports file tree-based preview.
+- Supports automatic refreshing.
+- Supports basic file operations, such as multiple selection for deleting/moving/copying, and creating new folders.
+- Hold down the Ctrl, Shift, or Cmd key to select multiple items.
+ - Supported multi-select operations include: delete, move, copy, pack download, add tags, remove tags, move to another folder, copy to another folder, drag and drop.
+ - You can keep the multi-select state by clicking the "Keep Multi-Select" button in the lower right corner, allowing you to perform multiple operations on the selected file collection conveniently.
+
+### 🆚 image comparison (similar to Imgsli)
+- Provides a side-by-side comparison of two images.
+- Provides a comparison of image generation information at the same time.
+
+### 🌐 Multilingual Support
+- Currently supports Simplified Chinese/Traditional Chinese/English/German.
+- If you would like to add a new language, please refer to [i18n.ts](https://github.com/zanllp/sd-webui-infinite-image-browsing/blob/main/vue/src/i18n/zh-hans.ts) and submit the relevant code.
+
+### 🔐 Privacy and Security
+- Supports custom secret key for authentication.
+- Supports configuring access control for the file system, which will be enabled by default when the service allows public access (Only when used as an extension of sd-webui).
+- Supports customizing the allowed paths for access control.
+- Supports controlling access permissions. You can run IIB in read-only mode.
+- [Click here to see details](.env.example)
+
+
+### 📦 Packaging/Batch Download
+- Allows you to download multiple images at once.
+- The data source can be search results, a regular image grid view page, walk mode, etc. Images can be added to the processing list through drag-and-drop or "Send To".
+### ⌨️ Keyboard Shortcuts
+- Allows for deleting and adding/removing tags, with customizable trigger buttons in the global settings page.
+
+
+If you like this project and find it helpful, please consider giving it a ⭐️. This would be very important for me to continue developing and maintaining this project. If you have any suggestions or ideas, please feel free to raise them in the issue section, and I will respond as soon as possible. Thank you again for your support!
+
+
+ +
+## Image Search
+
+During the first use, you need to click and wait for the index generation. For my case with 20,000 images, it took about 45 seconds (with an AMD 5600X CPU and PCIe SSD). For subsequent uses, it will check whether there are changes in the folder, and if so, it needs to regenerate the index. Usually, this process is very fast.
+
+Image search supports translation, see https://github.com/zanllp/sd-webui-infinite-image-browsing/issues/39 for more detail. Feel free to share files for other languages to facilitate everyone's use.
+
+
+## Image Search
+
+During the first use, you need to click and wait for the index generation. For my case with 20,000 images, it took about 45 seconds (with an AMD 5600X CPU and PCIe SSD). For subsequent uses, it will check whether there are changes in the folder, and if so, it needs to regenerate the index. Usually, this process is very fast.
+
+Image search supports translation, see https://github.com/zanllp/sd-webui-infinite-image-browsing/issues/39 for more detail. Feel free to share files for other languages to facilitate everyone's use.
+ +
+You can also trigger it by hovering your mouse over the icon in the top right corner.
+
+
+
+You can also trigger it by hovering your mouse over the icon in the top right corner.
+
+