The Technology Behind BLOOM Training



In recent years, training ever larger language models has become the norm. While the issues of those models' not being released for further study is frequently discussed, the hidden knowledge about how to train such models rarely gets any attention. This article aims to change this by shedding some light on the technology and engineering behind training such models both in terms of hardware and software on the example of the 176B parameter language model BLOOM.
But first we would like to thank the companies and key people and groups that made the amazing feat of training a 176 Billion parameter model by a small group of dedicated people possible.
Then the hardware setup and main technological components will be discussed.
Here's a quick summary of project:
| Hardware | 384 80GB A100 GPUs |
| Software | Megatron-DeepSpeed |
| Architecture | GPT3 w/ extras |
| Dataset | 350B tokens of 59 Languages |
| Training time | 3.5 months |
People
The project was conceived by Thomas Wolf (co-founder and CSO - Hugging Face), who dared to compete with the huge corporations not only to train one of the largest multilingual models, but also to make the final result accessible to all people, thus making what was but a dream to most people a reality.
This article focuses specifically on the engineering side of the training of the model. The most important part of the technology behind BLOOM were the people and companies who shared their expertise and helped us with coding and training.
There are 6 main groups of people to thank:
- The HuggingFace's BigScience team who dedicated more than half a dozen full time employees to figure out and run the training from inception to the finishing line and provided and paid for all the infrastructure beyond the Jean Zay's compute.
- The Microsoft DeepSpeed team, who developed DeepSpeed and later integrated it with Megatron-LM, and whose developers spent many weeks working on the needs of the project and provided lots of awesome practical experiential advice before and during the training.
- The NVIDIA Megatron-LM team, who developed Megatron-LM and who were super helpful answering our numerous questions and providing first class experiential advice.
- The IDRIS / GENCI team managing the Jean Zay supercomputer, who donated to the project an insane amount of compute and great system administration support.
- The PyTorch team who created a super powerful framework, on which the rest of the software was based, and who were very supportive to us during the preparation for the training, fixing multiple bugs and improving the usability of the PyTorch components we relied on during the training.
- The volunteers in the BigScience Engineering workgroup
It'd be very difficult to name all the amazing people who contributed to the engineering side of the project, so I will just name a few key people outside of Hugging Face who were the engineering foundation of this project for the last 14 months:
Olatunji Ruwase, Deepak Narayanan, Jeff Rasley, Jared Casper, Samyam Rajbhandari and Rémi Lacroix
Also we are grateful to all the companies who allowed their employees to contribute to this project.
Overview
BLOOM's architecture is very similar to GPT3 with a few added improvements as will be discussed later in this article.
The model was trained on Jean Zay, the French government-funded super computer that is managed by GENCI and installed at IDRIS, the national computing center for the French National Center for Scientific Research (CNRS). The compute was generously donated to the project by GENCI (grant 2021-A0101012475).
The following hardware was used during the training:
- GPUs: 384 NVIDIA A100 80GB GPUs (48 nodes) + 32 spare gpus
- 8 GPUs per node Using NVLink 4 inter-gpu connects, 4 OmniPath links
- CPU: AMD EPYC 7543 32-Core Processor
- CPU memory: 512GB per node
- GPU memory: 640GB per node
- Inter-node connect: Omni-Path Architecture (OPA) w/ non-blocking fat tree
- NCCL-communications network: a fully dedicated subnet
- Disc IO network: GPFS shared with other nodes and users
Checkpoints:
- main checkpoints
- each checkpoint with fp32 optim states and bf16+fp32 weights is 2.3TB - just the bf16 weights are 329GB.
Datasets:
- 46 Languages in 1.5TB of deduplicated massively cleaned up text, converted into 350B unique tokens
- Vocabulary size of the model is 250,680 tokens
- For full details please see The BigScience Corpus A 1.6TB Composite Multilingual Dataset
The training of the 176B BLOOM model occurred over Mar-Jul 2022 and took about 3.5 months to complete (approximately 1M compute hours).
Megatron-DeepSpeed
The 176B BLOOM model has been trained using Megatron-DeepSpeed, which is a combination of 2 main technologies:
- DeepSpeed is a deep learning optimization library that makes distributed training easy, efficient, and effective.
- Megatron-LM is a large, powerful transformer model framework developed by the Applied Deep Learning Research team at NVIDIA.
The DeepSpeed team developed a 3D parallelism based implementation by combining ZeRO sharding and pipeline parallelism from the DeepSpeed library with Tensor Parallelism from Megatron-LM. More details about each component can be seen in the table below.
Please note that the BigScience's Megatron-DeepSpeed is a fork of the original Megatron-DeepSpeed repository, to which we added multiple additions.
Here is a table of which components were provided by which framework to train BLOOM:
| Component | DeepSpeed | Megatron-LM |
|---|---|---|
| ZeRO Data Parallelism | V | |
| Tensor Parallelism | V | |
| Pipeline Parallelism | V | |
| BF16Optimizer | V | |
| Fused CUDA Kernels | V | |
| DataLoader | V |
Please note that both Megatron-LM and DeepSpeed have Pipeline Parallelism and BF16 Optimizer implementations, but we used the ones from DeepSpeed as they are integrated with ZeRO.
Megatron-DeepSpeed implements 3D Parallelism to allow huge models to train in a very efficient way. Let’s briefly discuss the 3D components.
- DataParallel (DP) - the same setup is replicated multiple times, and each being fed a slice of the data. The processing is done in parallel and all setups are synchronized at the end of each training step.
- TensorParallel (TP) - each tensor is split up into multiple chunks, so instead of having the whole tensor reside on a single GPU, each shard of the tensor resides on its designated GPU. During processing each shard gets processed separately and in parallel on different GPUs and the results are synced at the end of the step. This is what one may call horizontal parallelism, as the splitting happens on a horizontal level.
- PipelineParallel (PP) - the model is split up vertically (layer-level) across multiple GPUs, so that only one or several layers of the model are placed on a single GPU. Each GPU processes in parallel different stages of the pipeline and works on a small chunk of the batch.
- Zero Redundancy Optimizer (ZeRO) - also performs sharding of the tensors somewhat similar to TP, except the whole tensor gets reconstructed in time for a forward or backward computation, therefore the model doesn't need to be modified. It also supports various offloading techniques to compensate for limited GPU memory.
Data Parallelism
Most users with just a few GPUs are likely to be familiar with DistributedDataParallel (DDP) PyTorch documentation. In this method the model is fully replicated to each GPU and then after each iteration all the models synchronize their states with each other. This approach allows training speed up but throwing more resources at the problem, but it only works if the model can fit onto a single GPU.
ZeRO Data Parallelism
ZeRO-powered data parallelism (ZeRO-DP) is described on the following diagram from this blog post
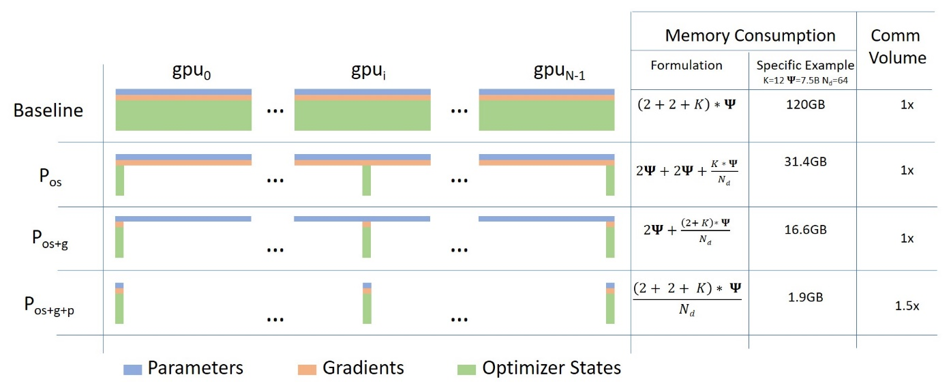
It can be difficult to wrap one's head around it, but in reality, the concept is quite simple. This is just the usual DDP, except, instead of replicating the full model params, gradients and optimizer states, each GPU stores only a slice of it. And then at run-time when the full layer params are needed just for the given layer, all GPUs synchronize to give each other parts that they miss - this is it.
This component is implemented by DeepSpeed.
Tensor Parallelism
In Tensor Parallelism (TP) each GPU processes only a slice of a tensor and only aggregates the full tensor for operations that require the whole thing.
In this section we use concepts and diagrams from the Megatron-LM paper: Efficient Large-Scale Language Model Training on GPU Clusters.
The main building block of any transformer is a fully connected nn.Linear followed by a nonlinear activation GeLU.
Following the Megatron paper's notation, we can write the dot-product part of it as Y = GeLU(XA), where X and Y are the input and output vectors, and A is the weight matrix.
If we look at the computation in matrix form, it's easy to see how the matrix multiplication can be split between multiple GPUs:
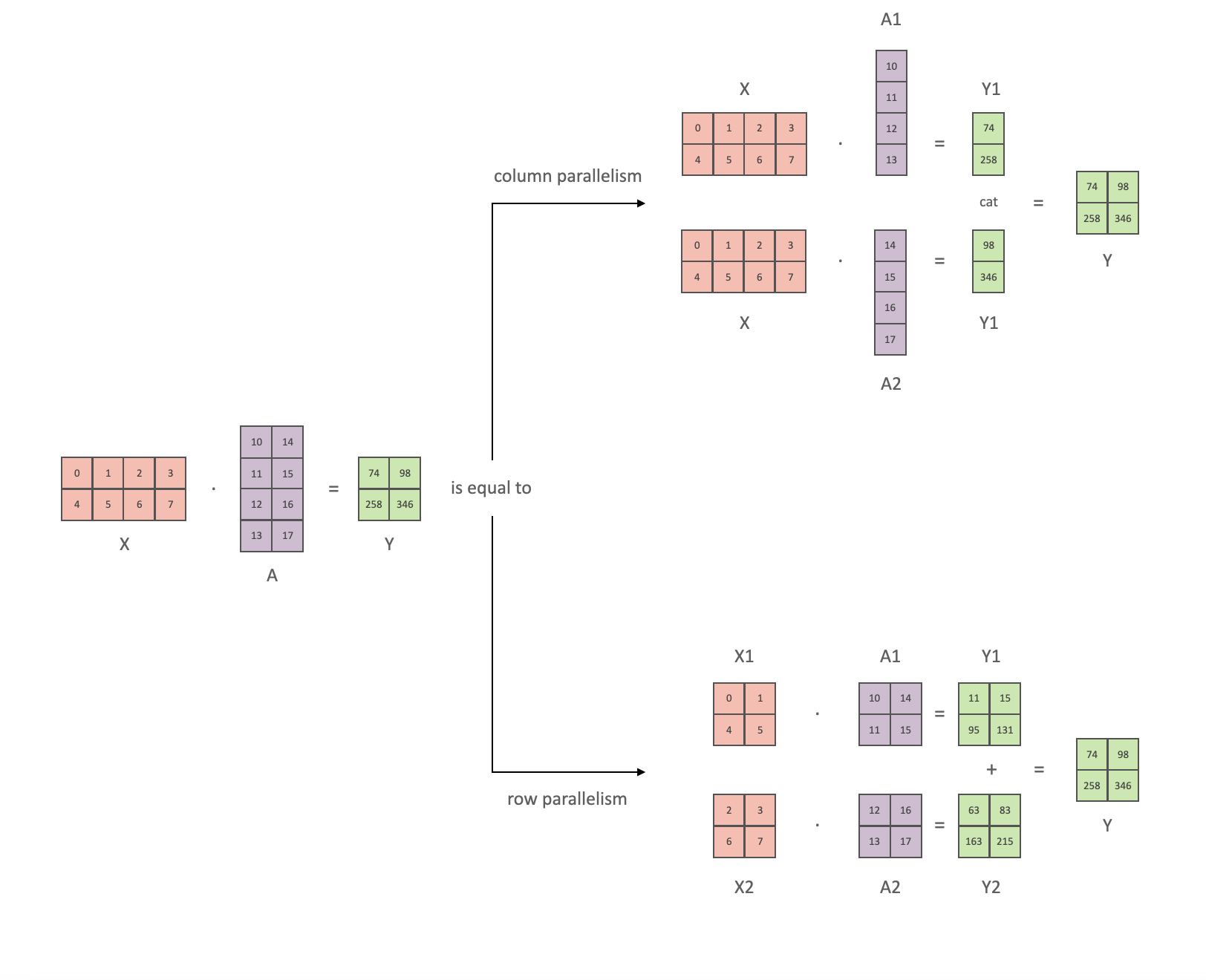
If we split the weight matrix A column-wise across N GPUs and perform matrix multiplications XA_1 through XA_n in parallel, then we will end up with N output vectors Y_1, Y_2, ..., Y_n which can be fed into GeLU independently:
 . Notice with the Y matrix split along the columns, we can split the second GEMM along its rows so that it takes the output of the GeLU directly without any extra communication.
. Notice with the Y matrix split along the columns, we can split the second GEMM along its rows so that it takes the output of the GeLU directly without any extra communication.
Using this principle, we can update an MLP of arbitrary depth, while synchronizing the GPUs after each row-column sequence. The Megatron-LM paper authors provide a helpful illustration for that:
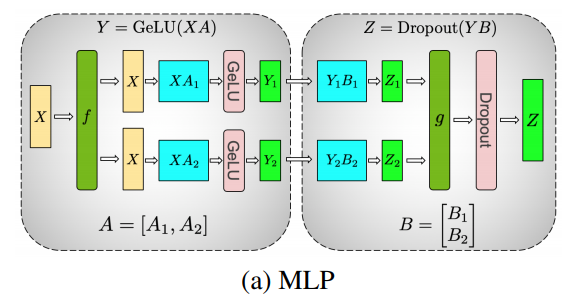
Here f is an identity operator in the forward pass and all reduce in the backward pass while g is an all reduce in the forward pass and identity in the backward pass.
Parallelizing the multi-headed attention layers is even simpler, since they are already inherently parallel, due to having multiple independent heads!
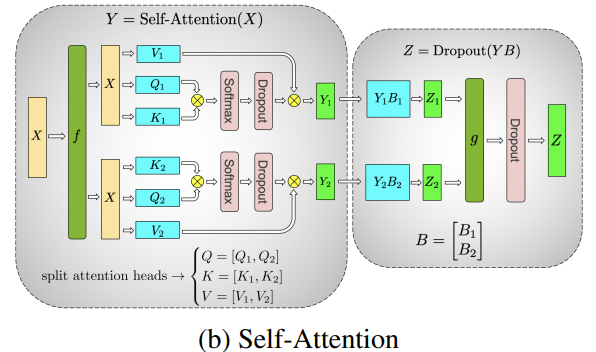
Special considerations: Due to the two all reduces per layer in both the forward and backward passes, TP requires a very fast interconnect between devices. Therefore it's not advisable to do TP across more than one node, unless you have a very fast network. In our case the inter-node was much slower than PCIe. Practically, if a node has 4 GPUs, the highest TP degree is therefore 4. If you need a TP degree of 8, you need to use nodes that have at least 8 GPUs.
This component is implemented by Megatron-LM. Megatron-LM has recently expanded tensor parallelism to include sequence parallelism that splits the operations that cannot be split as above, such as LayerNorm, along the sequence dimension. The paper Reducing Activation Recomputation in Large Transformer Models provides details for this technique. Sequence parallelism was developed after BLOOM was trained so not used in the BLOOM training.
Pipeline Parallelism
Naive Pipeline Parallelism (naive PP) is where one spreads groups of model layers across multiple GPUs and simply moves data along from GPU to GPU as if it were one large composite GPU. The mechanism is relatively simple - switch the desired layers .to() the desired devices and now whenever the data goes in and out those layers switch the data to the same device as the layer and leave the rest unmodified.
This performs a vertical model parallelism, because if you remember how most models are drawn, we slice the layers vertically. For example, if the following diagram shows an 8-layer model:
=================== ===================
| 0 | 1 | 2 | 3 | | 4 | 5 | 6 | 7 |
=================== ===================
GPU0 GPU1
we just sliced it in 2 vertically, placing layers 0-3 onto GPU0 and 4-7 to GPU1.
Now while data travels from layer 0 to 1, 1 to 2 and 2 to 3 this is just like the forward pass of a normal model on a single GPU. But when data needs to pass from layer 3 to layer 4 it needs to travel from GPU0 to GPU1 which introduces a communication overhead. If the participating GPUs are on the same compute node (e.g. same physical machine) this copying is pretty fast, but if the GPUs are located on different compute nodes (e.g. multiple machines) the communication overhead could be significantly larger.
Then layers 4 to 5 to 6 to 7 are as a normal model would have and when the 7th layer completes we often need to send the data back to layer 0 where the labels are (or alternatively send the labels to the last layer). Now the loss can be computed and the optimizer can do its work.
Problems:
- the main deficiency and why this one is called "naive" PP, is that all but one GPU is idle at any given moment. So if 4 GPUs are used, it's almost identical to quadrupling the amount of memory of a single GPU, and ignoring the rest of the hardware. Plus there is the overhead of copying the data between devices. So 4x 6GB cards will be able to accommodate the same size as 1x 24GB card using naive PP, except the latter will complete the training faster, since it doesn't have the data copying overhead. But, say, if you have 40GB cards and need to fit a 45GB model you can with 4x 40GB cards (but barely because of the gradient and optimizer states).
- shared embeddings may need to get copied back and forth between GPUs.
Pipeline Parallelism (PP) is almost identical to a naive PP described above, but it solves the GPU idling problem, by chunking the incoming batch into micro-batches and artificially creating a pipeline, which allows different GPUs to concurrently participate in the computation process.
The following illustration from the GPipe paper shows the naive PP on the top, and PP on the bottom:
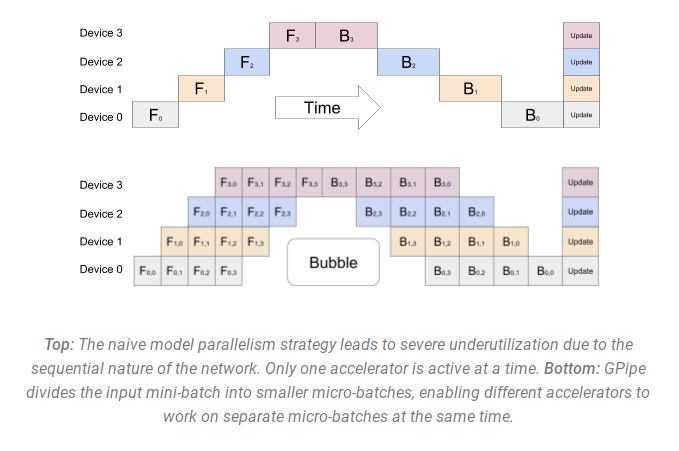
It's easy to see from the bottom diagram how PP has fewer dead zones, where GPUs are idle. The idle parts are referred to as the "bubble".
Both parts of the diagram show parallelism that is of degree 4. That is 4 GPUs are participating in the pipeline. So there is the forward path of 4 pipe stages F0, F1, F2 and F3 and then the return reverse order backward path of B3, B2, B1 and B0.
PP introduces a new hyper-parameter to tune that is called chunks. It defines how many chunks of data are sent in a sequence through the same pipe stage. For example, in the bottom diagram, you can see that chunks=4. GPU0 performs the same forward path on chunk 0, 1, 2 and 3 (F0,0, F0,1, F0,2, F0,3) and then it waits for other GPUs to do their work and only when their work is starting to be complete, does GPU0 start to work again doing the backward path for chunks 3, 2, 1 and 0 (B0,3, B0,2, B0,1, B0,0).
Note that conceptually this is the same concept as gradient accumulation steps (GAS). PyTorch uses chunks, whereas DeepSpeed refers to the same hyper-parameter as GAS.
Because of the chunks, PP introduces the concept of micro-batches (MBS). DP splits the global data batch size into mini-batches, so if you have a DP degree of 4, a global batch size of 1024 gets split up into 4 mini-batches of 256 each (1024/4). And if the number of chunks (or GAS) is 32 we end up with a micro-batch size of 8 (256/32). Each Pipeline stage works with a single micro-batch at a time.
To calculate the global batch size of the DP + PP setup we then do: mbs*chunks*dp_degree (8*32*4=1024).
Let's go back to the diagram.
With chunks=1 you end up with the naive PP, which is very inefficient. With a very large chunks value you end up with tiny micro-batch sizes which could be not very efficient either. So one has to experiment to find the value that leads to the highest efficient utilization of the GPUs.
While the diagram shows that there is a bubble of "dead" time that can't be parallelized because the last forward stage has to wait for backward to complete the pipeline, the purpose of finding the best value for chunks is to enable a high concurrent GPU utilization across all participating GPUs which translates to minimizing the size of the bubble.
This scheduling mechanism is known as all forward all backward. Some other alternatives are one forward one backward and interleaved one forward one backward.
While both Megatron-LM and DeepSpeed have their own implementation of the PP protocol, Megatron-DeepSpeed uses the DeepSpeed implementation as it's integrated with other aspects of DeepSpeed.
One other important issue here is the size of the word embedding matrix. While normally a word embedding matrix consumes less memory than the transformer block, in our case with a huge 250k vocabulary, the embedding layer needed 7.2GB in bf16 weights and the transformer block is just 4.9GB. Therefore, we had to instruct Megatron-Deepspeed to consider the embedding layer as a transformer block. So we had a pipeline of 72 layers, 2 of which were dedicated to the embedding (first and last). This allowed to balance out the GPU memory consumption. If we didn't do it, we would have had the first and the last stages consume most of the GPU memory, and 95% of GPUs would be using much less memory and thus the training would be far from being efficient.
DP+PP
The following diagram from the DeepSpeed pipeline tutorial demonstrates how one combines DP with PP.
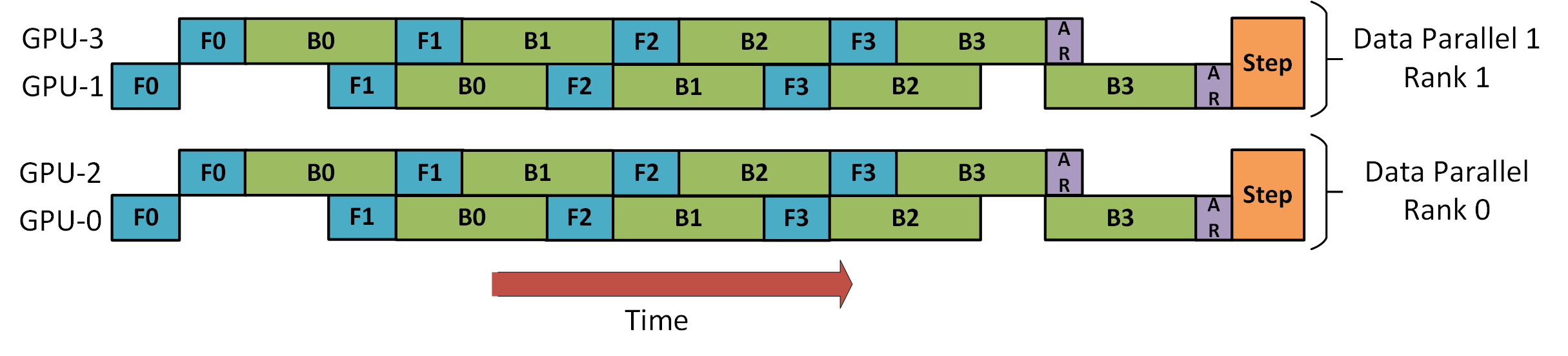
Here it's important to see how DP rank 0 doesn't see GPU2 and DP rank 1 doesn't see GPU3. To DP there are just GPUs 0 and 1 where it feeds data as if there were just 2 GPUs. GPU0 "secretly" offloads some of its load to GPU2 using PP. And GPU1 does the same by enlisting GPU3 to its aid.
Since each dimension requires at least 2 GPUs, here you'd need at least 4 GPUs.
DP+PP+TP
To get an even more efficient training PP is combined with TP and DP which is called 3D parallelism. This can be seen in the following diagram.
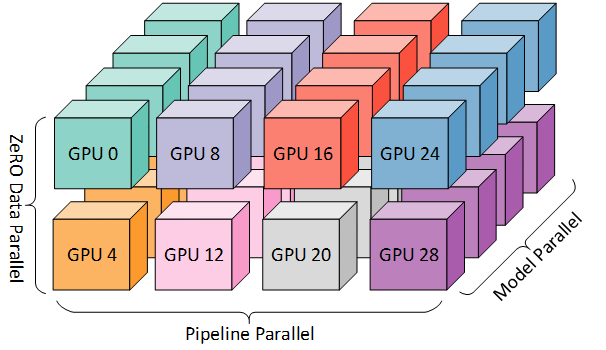
This diagram is from a blog post 3D parallelism: Scaling to trillion-parameter models, which is a good read as well.
Since each dimension requires at least 2 GPUs, here you'd need at least 8 GPUs for full 3D parallelism.
ZeRO DP+PP+TP
One of the main features of DeepSpeed is ZeRO, which is a super-scalable extension of DP. It has already been discussed in ZeRO Data Parallelism. Normally it's a standalone feature that doesn't require PP or TP. But it can be combined with PP and TP.
When ZeRO-DP is combined with PP (and optionally TP) it typically enables only ZeRO stage 1, which shards only optimizer states. ZeRO stage 2 additionally shards gradients, and stage 3 also shards the model weights.
While it's theoretically possible to use ZeRO stage 2 with Pipeline Parallelism, it will have bad performance impacts. There would need to be an additional reduce-scatter collective for every micro-batch to aggregate the gradients before sharding, which adds a potentially significant communication overhead. By nature of Pipeline Parallelism, small micro-batches are used and instead the focus is on trying to balance arithmetic intensity (micro-batch size) with minimizing the Pipeline bubble (number of micro-batches). Therefore those communication costs are going to hurt.
In addition, there are already fewer layers than normal due to PP and so the memory savings won't be huge. PP already reduces gradient size by 1/PP, and so gradient sharding savings on top of that are less significant than pure DP.
ZeRO stage 3 can also be used to train models at this scale, however, it requires more communication than the DeepSpeed 3D parallel implementation. After careful evaluation in our environment which happened a year ago we found Megatron-DeepSpeed 3D parallelism performed best. Since then ZeRO stage 3 performance has dramatically improved and if we were to evaluate it today perhaps we would have chosen stage 3 instead.
BF16Optimizer
Training huge LLM models in FP16 is a no-no.
We have proved it to ourselves by spending several months training a 104B model which as you can tell from the tensorboard was but a complete failure. We learned a lot of things while fighting the ever diverging lm-loss:
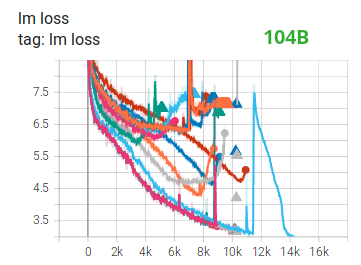
and we also got the same advice from the Megatron-LM and DeepSpeed teams after they trained the 530B model. The recent release of OPT-175B too reported that they had a very difficult time training in FP16.
So back in January as we knew we would be training on A100s which support the BF16 format Olatunji Ruwase developed a BF16Optimizer which we used to train BLOOM.
If you are not familiar with this data format, please have a look at the bits layout. The key to BF16 format is that it has the same exponent as FP32 and thus doesn't suffer from overflow FP16 suffers from a lot! With FP16, which has a max numerical range of 64k, you can only multiply small numbers. e.g. you can do 250*250=62500, but if you were to try 255*255=65025 you got yourself an overflow, which is what causes the main problems during training. This means your weights have to remain tiny. A technique called loss scaling can help with this problem, but the limited range of FP16 is still an issue when models become very large.
BF16 has no such problem, you can easily do 10_000*10_000=100_000_000 and it's no problem.
Of course, since BF16 and FP16 have the same size of 2 bytes, one doesn't get a free lunch and one pays with really bad precision when using BF16. However, if you remember the training using stochastic gradient descent and its variations is a sort of stumbling walk, so if you don't get the perfect direction immediately it's no problem, you will correct yourself in the next steps.
Regardless of whether one uses BF16 or FP16 there is also a copy of weights which is always in FP32 - this is what gets updated by the optimizer. So the 16-bit formats are only used for the computation, the optimizer updates the FP32 weights with full precision and then casts them into the 16-bit format for the next iteration.
All PyTorch components have been updated to ensure that they perform any accumulation in FP32, so no loss happening there.
One crucial issue is gradient accumulation, and it's one of the main features of pipeline parallelism as the gradients from each microbatch processing get accumulated. It's crucial to implement gradient accumulation in FP32 to keep the training precise, and this is what BF16Optimizer does.
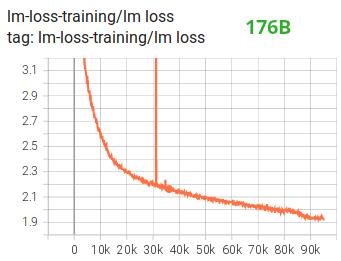
Besides other improvements we believe that using BF16 mixed precision training turned a potential nightmare into a relatively smooth process which can be observed from the following lm loss graph:
Fused CUDA Kernels
The GPU performs two things. It can copy data to/from memory and perform computations on that data. While the GPU is busy copying the GPU's computations units idle. If we want to efficiently utilize the GPU we want to minimize the idle time.
A kernel is a set of instructions that implements a specific PyTorch operation. For example, when you call torch.add, it goes through a PyTorch dispatcher which looks at the input tensor(s) and various other things and decides which code it should run, and then runs it. A CUDA kernel is a specific implementation that uses the CUDA API library and can only run on NVIDIA GPUs.
Now, when instructing the GPU to compute c = torch.add(a, b); e = torch.max([c,d]), a naive approach, and what PyTorch will do unless instructed otherwise, is to launch two separate kernels, one to perform the addition of a and b and another to find the maximum value between c and d. In this case, the GPU fetches from its memory a and b, performs the addition, and then copies the result back into the memory. It then fetches c and d and performs the max operation and again copies the result back into the memory.
If we were to fuse these two operations, i.e. put them into a single "fused kernel", and just launch that one kernel we won't copy the intermediary result c to the memory, but leave it in the GPU registers and only need to fetch d to complete the last computation. This saves a lot of overhead and prevents GPU idling and makes the whole operation much more efficient.
Fused kernels are just that. Primarily they replace multiple discrete computations and data movements to/from memory into fused computations that have very few memory movements. Additionally, some fused kernels rewrite the math so that certain groups of computations can be performed faster.
To train BLOOM fast and efficiently it was necessary to use several custom fused CUDA kernels provided by Megatron-LM. In particular there is an optimized kernel to perform LayerNorm as well as kernels to fuse various combinations of the scaling, masking, and softmax operations. The addition of a bias term is also fused with the GeLU operation using PyTorch's JIT functionality. These operations are all memory bound, so it is important to fuse them to maximize the amount of computation done once a value has been retrieved from memory. So, for example, adding the bias term while already doing the memory bound GeLU operation adds no additional time. These kernels are all available in the Megatron-LM repository.
Datasets
Another important feature from Megatron-LM is the efficient data loader. During start up of the initial training each data set is split into samples of the requested sequence length (2048 for BLOOM) and index is created to number each sample. Based on the training parameters the number of epochs for a dataset is calculated and an ordering for that many epochs is created and then shuffled. For example, if a dataset has 10 samples and should be gone through twice, the system first lays out the samples indices in order [0, ..., 9, 0, ..., 9] and then shuffles that order to create the final global order for the dataset. Notice that this means that training will not simply go through the entire dataset and then repeat, it is possible to see the same sample twice before seeing another sample at all, but at the end of training the model will have seen each sample twice. This helps ensure a smooth training curve through the entire training process. These indices, including the offsets into the base dataset of each sample, are saved to a file to avoid recomputing them each time a training process is started. Several of these datasets can then be blended with varying weights into the final data seen by the training process.
Embedding LayerNorm
While we were fighting with trying to stop 104B from diverging we discovered that adding an additional LayerNorm right after the first word embedding made the training much more stable.
This insight came from experimenting with bitsandbytes which contains a StableEmbedding which is a normal Embedding with layernorm and it uses a uniform xavier initialization.
Positional Encoding
We also replaced the usual positional embedding with an AliBi - based on the paper: Train Short, Test Long: Attention with Linear Biases Enables Input Length Extrapolation, which allows to extrapolate for longer input sequences than the ones the model was trained on. So even though we train on sequences with length 2048 the model can also deal with much longer sequences during inference.
Training Difficulties
With the architecture, hardware and software in place we were able to start training in early March 2022. However, it was not just smooth sailing from there. In this section we discuss some of the main hurdles we encountered.
There were a lot of issues to figure out before the training started. In particular we found several issues that manifested themselves only once we started training on 48 nodes, and won't appear at small scale. E.g., CUDA_LAUNCH_BLOCKING=1 was needed to prevent the framework from hanging, and we needed to split the optimizer groups into smaller groups, otherwise the framework would again hang. You can read about those in detail in the training prequel chronicles.
The main type of issue encountered during training were hardware failures. As this was a new cluster with about 400 GPUs, on average we were getting 1-2 GPU failures a week. We were saving a checkpoint every 3h (100 iterations) so on average we would lose 1.5h of training on hardware crash. The Jean Zay sysadmins would then replace the faulty GPUs and bring the node back up. Meanwhile we had backup nodes to use instead.
We have run into a variety of other problems that led to 5-10h downtime several times, some related to a deadlock bug in PyTorch, others due to running out of disk space. If you are curious about specific details please see training chronicles.
We were planning for all these downtimes when deciding on the feasibility of training this model - we chose the size of the model to match that feasibility and the amount of data we wanted the model to consume. With all the downtimes we managed to finish the training in our estimated time. As mentioned earlier it took about 1M compute hours to complete.
One other issue was that SLURM wasn't designed to be used by a team of people. A SLURM job is owned by a single user and if they aren't around, the other members of the group can't do anything to the running job. We developed a kill-switch workaround that allowed other users in the group to kill the current process without requiring the user who started the process to be present. This worked well in 90% of the issues. If SLURM designers read this - please add a concept of Unix groups, so that a SLURM job can be owned by a group.
As the training was happening 24/7 we needed someone to be on call - but since we had people both in Europe and West Coast Canada overall there was no need for someone to carry a pager, we would just overlap nicely. Of course, someone had to watch the training on the weekends as well. We automated most things, including recovery from hardware crashes, but sometimes a human intervention was needed as well.
Conclusion
The most difficult and intense part of the training was the 2 months leading to the start of the training. We were under a lot of pressure to start training ASAP, since the resources allocation was limited in time and we didn't have access to A100s until the very last moment. So it was a very difficult time, considering that the BF16Optimizer was written in the last moment and we needed to debug it and fix various bugs. And as explained in the previous section we discovered new problems that manifested themselves only once we started training on 48 nodes, and won't appear at small scale.
But once we sorted those out, the training itself was surprisingly smooth and without major problems. Most of the time we had one person monitoring the training and only a few times several people were involved to troubleshoot. We enjoyed great support from Jean Zay's administration who quickly addressed most needs that emerged during the training.
Overall it was a super-intense but very rewarding experience.
Training large language models is still a challenging task, but we hope by building and sharing this technology in the open others can build on top of our experience.
Resources
Important links
Papers and Articles
We couldn't have possibly explained everything in detail in this article, so if the technology presented here piqued your curiosity and you'd like to know more here are the papers to read:
Megatron-LM:
- Efficient Large-Scale Language Model Training on GPU Clusters.
- Reducing Activation Recomputation in Large Transformer Models
DeepSpeed:
- ZeRO: Memory Optimizations Toward Training Trillion Parameter Models
- ZeRO-Offload: Democratizing Billion-Scale Model Training
- ZeRO-Infinity: Breaking the GPU Memory Wall for Extreme Scale Deep Learning
- DeepSpeed: Extreme-scale model training for everyone
Joint Megatron-LM and Deepspeeed:
ALiBi:
- Train Short, Test Long: Attention with Linear Biases Enables Input Length Extrapolation
- What Language Model to Train if You Have One Million GPU Hours? - there you will find the experiments that lead to us choosing ALiBi.
BitsNBytes:
- 8-bit Optimizers via Block-wise Quantization (in the context of Embedding LayerNorm but the rest of the paper and the technology is amazing - the only reason were weren't using the 8-bit optimizer is because we were already saving the optimizer memory with DeepSpeed-ZeRO).
Blog credits
Huge thanks to the following kind folks who asked good questions and helped improve the readability of the article (listed in alphabetical order): Britney Muller, Douwe Kiela, Jared Casper, Jeff Rasley, Julien Launay, Leandro von Werra, Omar Sanseviero, Stefan Schweter and Thomas Wang.
The main graphics was created by Chunte Lee.