Normalized Confusion Matrices. (a) Recall, (b) Precision)
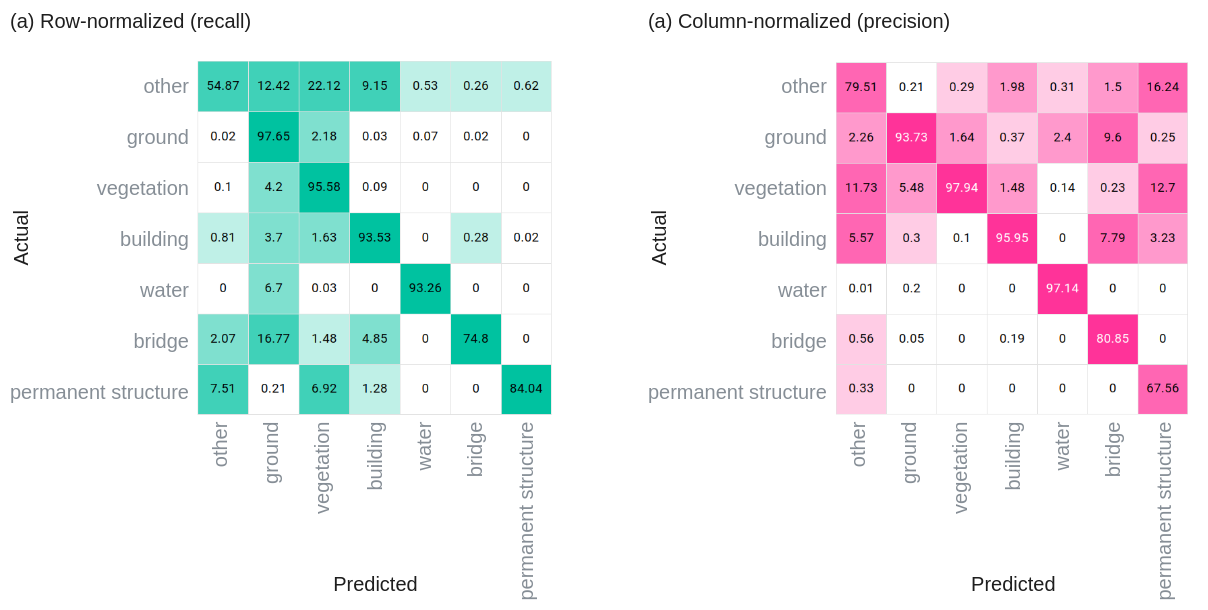
### Results
Samples of results.
From test patches with at least 10k points (i.e. at least 4 pts/m²), we sample without cherry-picking, with the following criteria:
* (1) WATER & BRIDGE
* (2) BUILD_GREENHOUSE
* (3) OTHER_PARKING
* (4) HIGHSLOPE1
* (5) URBAN
---
## Citation
**BibTeX:**
```
```
**APA:**
```
```
## Contact : TBD